Устройство для регистрации электрических разрядов в тестируемых объектах, предпочтительно, в кабельном соединении

Формула / Реферат
1. Устройство для регистрации электрических разрядов в тестируемом объекте (1) с двумя электрическими соединительными проводниками (1a, 1b, 1c, 1d), предпочтительно в кабельном соединении, содержащее оборудование (EVU) для оценки и, по меньшей мере, один первый и один второй датчик (2а, 2b, 2c, 2d), каждый из которых предназначен для направленно-чувствительной регистрации импульсов тока, протекающих через соответствующий один из соединительных проводников, путем регистрации магнитного поля, возникающего под действием импульсов тока, для выработки и подачи сигналов датчиков в оборудование для оценки в зависимости от импульсов тока и их направления, причем первый датчик вырабатывает сигнал (v1) первого датчика и второй датчик вырабатывает сигнал (v2) второго датчика, при этом первый и второй датчики расположены на первом взаимном расстоянии (L1), соответствующем первому интервалу (DТ1') времени для сигналов датчиков, возникающих от импульса тока, который проходит через тестируемый объект, и причем оборудование для оценки в зависимости от полученных сигналов датчиков вырабатывает сигнал (IND) показания, показывающий электрический разряд в тестируемом объекте в случае, когда датчики регистрируют импульсы тока, которые протекают в направлении от тестируемого объекта через два соединительных проводника или в направлении к тестируемому объекту через два соединительных проводника, отличающееся тем, что оборудование для оценки содержит первый блок (Т1) настройки, связанный с первым датчиком, и второй блок (Т2) настройки, связанный со вторым датчиком, при этом каждый блок в зависимости от соответствующего сигнала датчика формирует сигнал (SF1) первого фильтра и сигнал (SF2) второго фильтра соответственно, каждый из которых совершает периодическое колебание с заданным периодом времени (ТР), который длиннее, чем первый интервал времени, а также умножительный элемент (MU), на который подается и в котором формируется сигнал (SP) умножения в зависимости от сигналов фильтров, и тем, что оборудование для оценки формирует сигнал показания в зависимости от сигнала умножения.
2. Устройство по п.1, отличающееся тем, что каждый блок настройки содержит резонансный контур (RESD1, RESD2), настроенный на резонанс с круговой частотой, соответствующей периоду времени, при этом резонансные контуры имеют время (TD) затухания, соответствующее, по меньшей мере, двум периодам предварительно выбранного периода (ТР) времени, причем на каждый из резонансных контуров подается сигнал, сформированный в зависимости от соответствующего сигнала датчика, и каждый из блоков настройки формирует соответствующий сигнал фильтра в зависимости от выходного сигнала соответствующего резонансного контура.
3. Устройство по любому из пп.1 или 2, отличающееся тем, что каждая схема настройки содержит элемент (BPD1, BPD2) полосовой фильтрации с полосой пропускания, которая содержит круговую частоту, соответствующую периоду времени, и с шириной полосы пропускания, соответствующей времени затухания, при этом на каждый из элементов полосовой фильтрации подается сигнал, сформированный в зависимости от соответствующего сигнала датчика, и каждая из схем настройки формирует соответствующий сигнал фильтра в зависимости от выходного сигнала соответствующего элемента полосовой фильтрации.
4. Устройство по любому из пп.1-3, отличающееся тем, что соответствующий сигнал датчика подается в оборудование для оценки через линию (3а, 3b, 3с, 3d) передачи, связанную с каждым из датчиков, причем элемент (IMPD, 6а, 6b) согласования полного сопротивления подсоединен к соответствующей линии передачи, полное сопротивление концевой части которой, по меньшей мере, приблизительно равно характеристическому полному сопротивлению (Z) этой линии передачи.
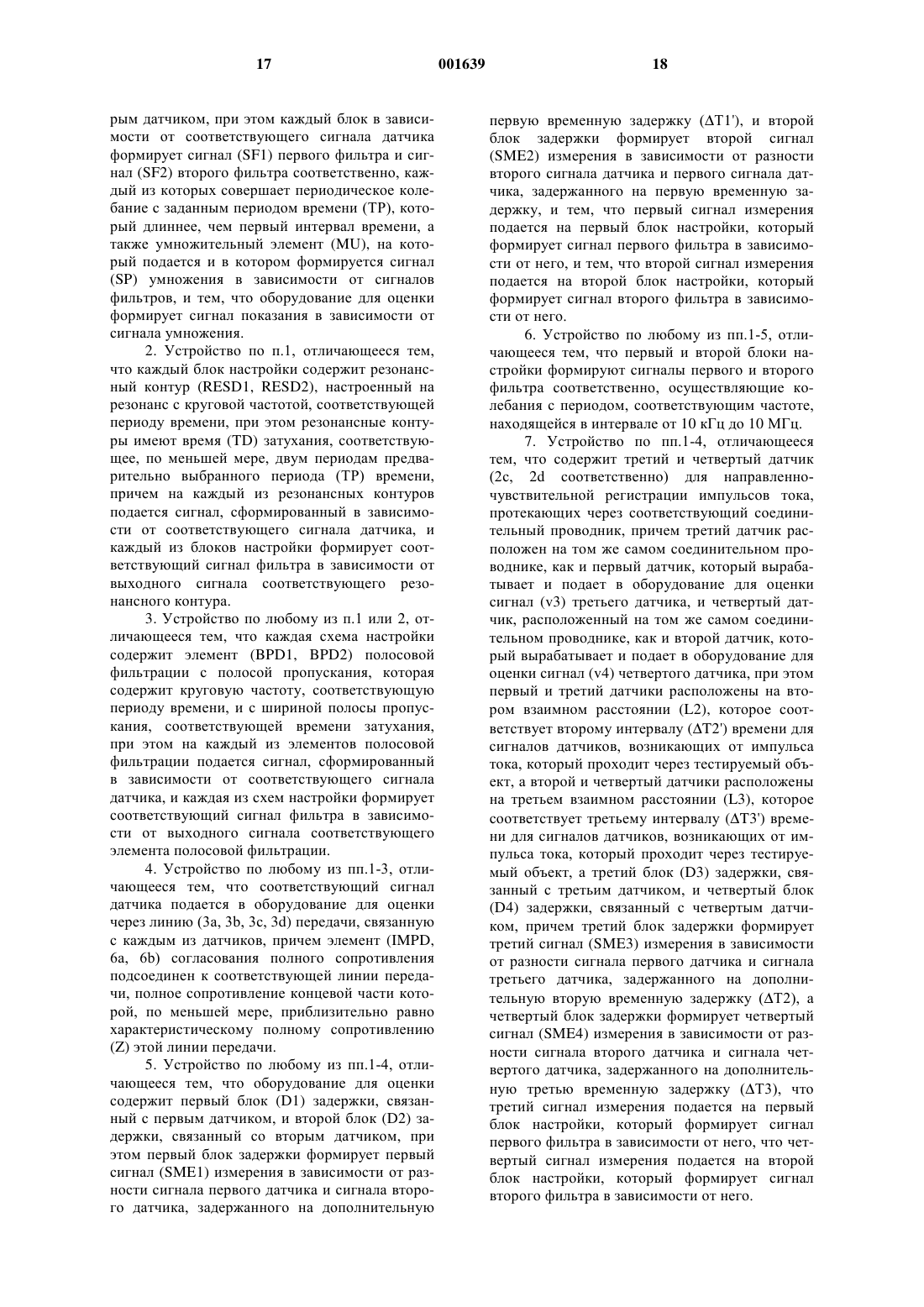
5. Устройство по любому из пп.1-4, отличающееся тем, что оборудование для оценки содержит первый блок (D1) задержки, связанный с первым датчиком, и второй блок (D2) задержки, связанный со вторым датчиком, при этом первый блок задержки формирует первый сигнал (SME1) измерения в зависимости от разности сигнала первого датчика и сигнала второго датчика, задержанного на дополнительную первую временную задержку (DТ1'), и второй блок задержки формирует второй сигнал (SME2) измерения в зависимости от разности второго сигнала датчика и первого сигнала датчика, задержанного на первую временную задержку, и тем, что первый сигнал измерения подается на первый блок настройки, который формирует сигнал первого фильтра в зависимости от него, и тем, что второй сигнал измерения подается на второй блок настройки, который формирует сигнал второго фильтра в зависимости от него.
6. Устройство по любому из пп.1-5, отличающееся тем, что первый и второй блоки настройки формируют сигналы первого и второго фильтра соответственно, осуществляющие колебания с периодом, соответствующим частоте, находящейся в интервале от 10 кГц до 10 МГц.
7. Устройство по пп.1-4, отличающееся тем, что содержит третий и четвертый датчик (2с, 2d соответственно) для направленно-чувствительной регистрации импульсов тока, протекающих через соответствующий соединительный проводник, причем третий датчик расположен на том же самом соединительном проводнике, как и первый датчик, который вырабатывает и подает в оборудование для оценки сигнал (v3) третьего датчика, и четвертый датчик, расположенный на том же самом соединительном проводнике, как и второй датчик, который вырабатывает и подает в оборудование для оценки сигнал (v4) четвертого датчика, при этом первый и третий датчики расположены на втором взаимном расстоянии (L2), которое соответствует второму интервалу (DT2') времени для сигналов датчиков, возникающих от импульса тока, который проходит через тестируемый объект, а второй и четвертый датчики расположены на третьем взаимном расстоянии (L3), которое соответствует третьему интервалу (DT3') времени для сигналов датчиков, возникающих от импульса тока, который проходит через тестируемый объект, а третий блок (D3) задержки, связанный с третьим датчиком, и четвертый блок (D4) задержки, связанный с четвертым датчиком, причем третий блок задержки формирует третий сигнал (SME3) измерения в зависимости от разности сигнала первого датчика и сигнала третьего датчика, задержанного на дополнительную вторую временную задержку (DТ2), а четвертый блок задержки формирует четвертый сигнал (SME4) измерения в зависимости от разности сигнала второго датчика и сигнала четвертого датчика, задержанного на дополнительную третью временную задержку (DТ3), что третий сигнал измерения подается на первый блок настройки, который формирует сигнал первого фильтра в зависимости от него, что четвертый сигнал измерения подается на второй блок настройки, который формирует сигнал второго фильтра в зависимости от него.
8. Устройство по п.7, отличающееся тем, что первый и второй блоки настройки формируют сигналы первого и второго фильтров соответственно, колеблющиеся с периодом времени, который в четыре раза больше, чем второй интервал времени, а второй интервал времени, по меньшей мере, приблизительно равен третьему интервалу времени.
9. Устройство по любому из пп.5-6, отличающееся тем, что блоки задержки состоят из кабеля (4а, 4b).
10. Устройство по любому из пп.1-9, отличающееся тем, что каждый блок настройки содержит последовательный резонансный контур (13а, 13b, 13с), соединенный параллельно с парaллельным резонансным контуром (14b, 16), на которые подается соответствующий сигнал датчика, и которые настраиваются так, чтобы проявлять к нему постоянное полное сопротивление во всем диапазоне частот, который относится к регистрации.
11. Устройство по любому из пп.1-10, отличающееся тем, что каждый датчик содержит, по меньшей мере, одну катушку (2а, 2b, 2с, 2d) Роговского, размещенную вокруг соединительного проводника.

Текст
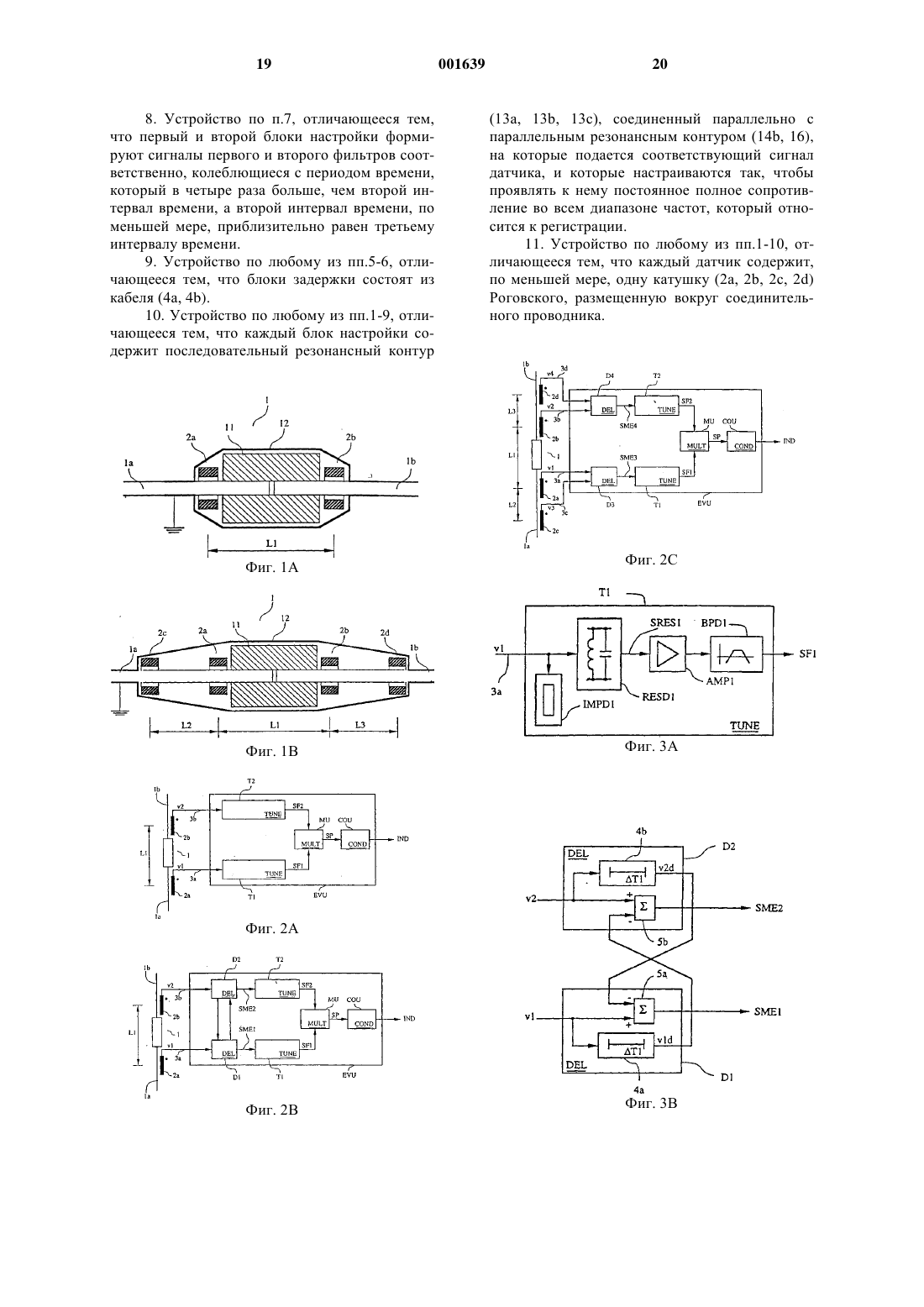
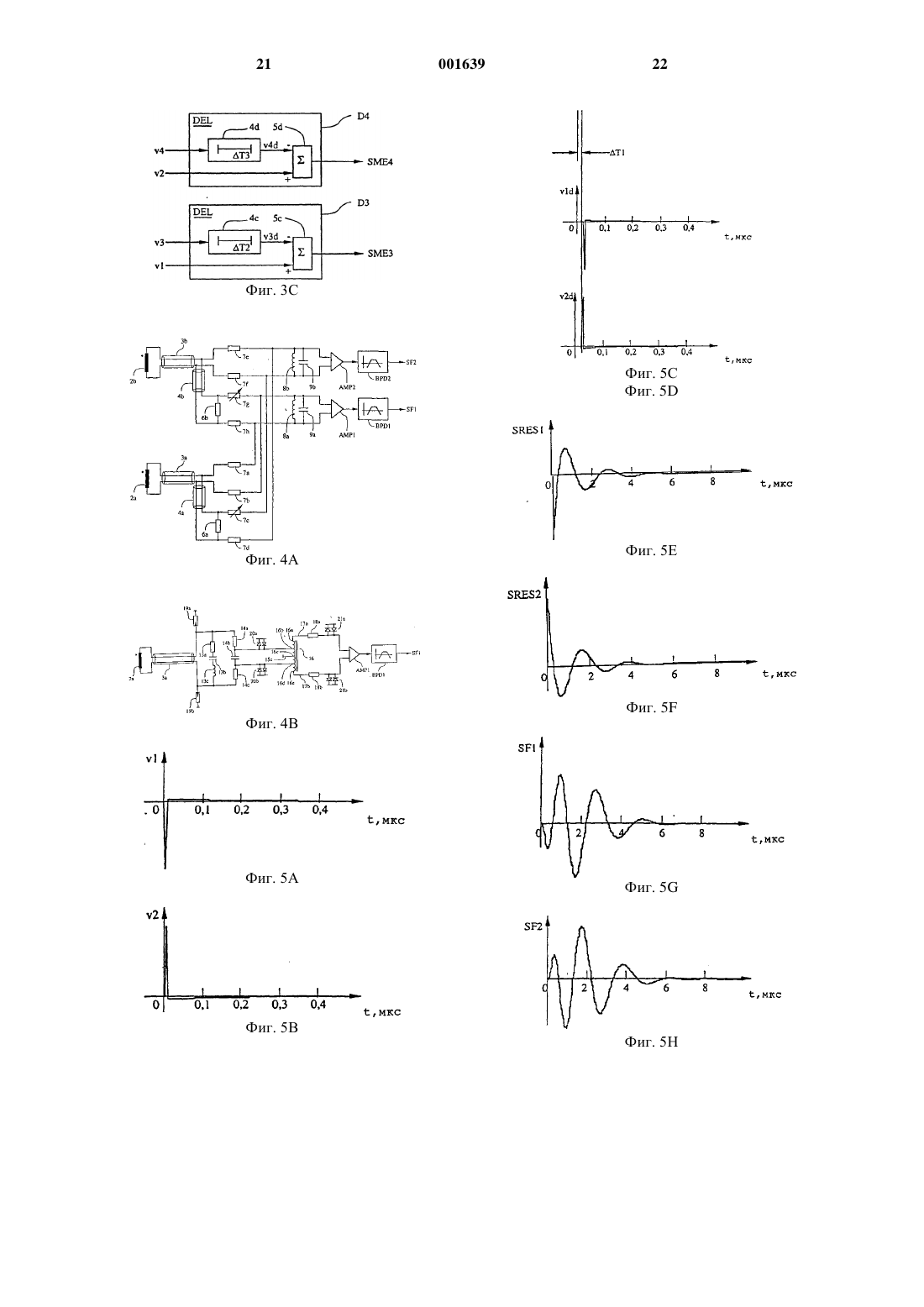
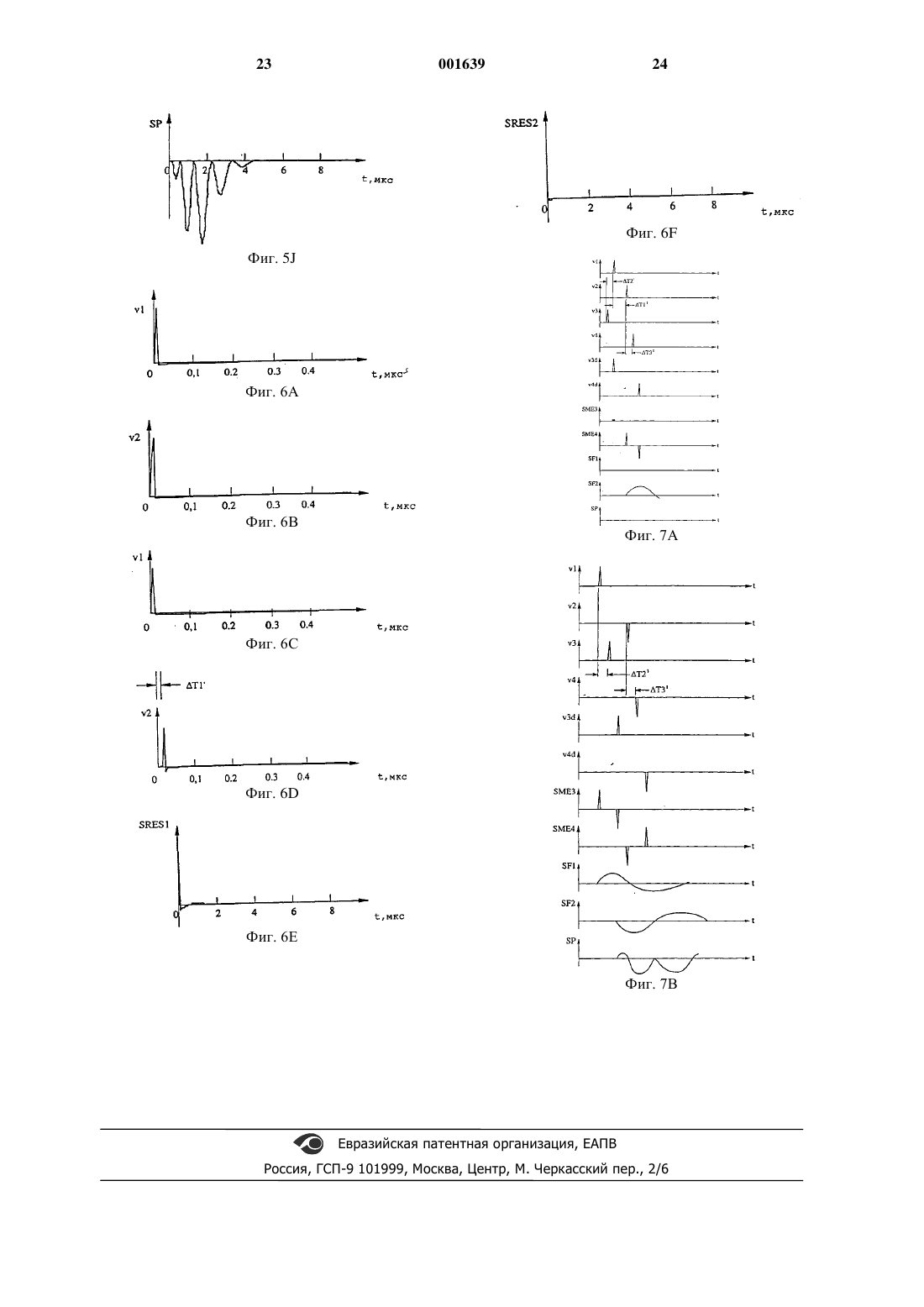
1 Область изобретения Настоящее изобретение относится к устройству, согласно преамбуле по п.1, для регистрации электрических разрядов в тестируемом объекте, предпочтительно в кабельном соединении. Уровень техники Местонахождение локальных электрических разрядов, так называемых частичных разрядов, в системе изоляции для элементов электрического оборудования или электрических высоковольтных устройств, таких как трансформаторы, генераторы, кабели и так далее,является важным параметром для оценки качества, состояния и предполагаемого срока эксплуатации элемента оборудования. Поэтому испытания на соответствие техническим условиям элементов для электрического высоковольтного оборудования обычно включают в себя тестирование по отношению к местонахождению частичных разрядов при хорошо определенных условиях, например, согласно IECPubl. 270 "Partial Discharge Measurements"). В добавление к этому, различные способы и устройства разработаны для тестирования по месту оборудования с целью оценки его параметров после определенного периода работы, состояния элементов и следовательно, например, создания более надежной базы для принятия мер по профилактическому сопровождению. Одна проблема, возникающая при измерении частичных разрядов, заключается в том, чтобы выявить различие между сигналами измерений, которые образуются от частичных разрядов в тестируемом объекте, и возмущениями, которые образуются от частичных разрядов в элементах тестируемого оборудования или в тестируемом оборудовании,или которые имеют некоторое другое происхождение, но частотный и амплитудный спектр которых похож на спектр частичных разрядов. Такие возмущения могут проходить в тестируемый объект через соединительные провода или проводники,которыми он гальванически связан с окружающим оборудованием, но могут также в соответствующих частотных диапазонах наводиться на элементы измерительного устройства электромагнитным излучением окружающей среды. Частичный разряд в элементе оборудования вызывает импульс тока, протекающий через проводники, с помощью которых элемент подсоединяется к другим техническим средствам, и эти импульсы тока можно регистрировать путем измерения напряжения, которое таким образом появляется при их прохождении через измерительное полное сопротивление, подсоединенное к одному из проводников, или с помощью прямого или косвенного измерения тока. Во время измерения напряжения, измерительное оборудование содержит разделительный конденсатор,который должен быть свободен от частичных разрядов в условиях, при которых проводится 2 измерение, и тестируемый объект, разделительный конденсатор и измерительное полное сопротивление гальванически связаны между собой известным в технике способом и подсоединяются к окружающим элементам оборудования и к тестируемому оборудованию соответственно. При регистрации частичного разряда путем измерения тока требуются датчики, которые чувствительны к магнитному полю, связанному с импульсом тока. Сигнал измерения, полученный от таких датчиков, можно гальванически развязать от тестируемого объекта и высоковольтной схемы, подсоединенной к нему, в случае чего устраняются, помимо всего прочего,такие проблемы, как эффект обратной связи,характерный для заземленных схем. Токоизмерительные датчики устраняют необходимость в наличии разделительных конденсаторов и измерительных полных сопротивлений, и их можно выполнить очень малых размеров, что делает простым размещение их в элементах оборудования с изменяющимися размерами и формами. В неопубликованной международной патентной заявке PCT/SE 96/01126 описано устройство для регистрации электрических разрядов в тестируемом объекте, по меньшей мере, с двумя электрическими соединительными проводами, содержащее оборудование для оценки,и два датчика, каждый из которых предназначен для направленно-чувствительной регистрации импульсов тока через соответствующий один из соединительных проводов. Датчики, например,в виде катушек Роговского (Rogowski), регистрируют магнитное поле, которое образуется под действием импульсов тока, и полярность этого магнитного поля, и выдают, в зависимости от этих импульсов тока и их направления, сигналы датчиков, которые подаются в оборудование для оценки. Это оборудование вырабатывает, в зависимости от полученных сигналов датчиков,сигнал показания, который показывает электрический разряд в тестируемом объекте в случае,когда оборудование датчика регистрирует импульсы тока, которые по существу одновременно протекают в направлении от тестируемого объекта через все соединительные провода или в направлении к тестируемому объекту через все соединительные провода. Оборудование для оценки содержит средство, которое формирует суммарный сигнал в зависимости от суммы сигналов датчиков, поступающих с датчиков, которые соединены отдельными по отношению друг к другу соединительными проводами, и разностный сигнал в зависимости от различия сигналов датчиков, поступающих с датчиков, которые соединены отдельными по отношению друг к другу соединительными проводами. Элемент сравнения, который находится в оборудовании для оценки, формирует сигнал сравнения в зависимости от суммарного сигнала и разностного сигнала, например, как частное между этими 3 сигналами, в результате чего формируется сигнал показания в зависимости от сигнала сравнения. Устройство содержит блок фильтра, связанный с каждым датчиком и размещенный в непосредственной близости от него для настройки на собственную частоту датчика с помощью схемы настройки в виде сопротивления,соединенного параллельно с конденсатором, и полосовой фильтр для настройки на последовательную резонансную частоту тестируемого объекта. Из-за наличия физического расстояния между двумя датчиками, размещенными на различных сторонах соединительных проводов тестируемого объекта в случае, когда внешнее возмущение проходит через соединительные провода тестируемого объекта, датчики будут вырабатывать свои соответствующие сигналы датчиков в различные интервалы времени, т.е. физическое расстояние между датчиками соответствует интервалу времени между поступлением сигналов датчиков, которые исходят от возмущения. Этот интервал времени может при определенных условиях, особенно в тестируемых объектах, которые из-за своей формы позволяют обнаруживать только месторасположение датчиков с большим взаимным физическим расстоянием с помощью способа, который раскрыт в описании патента, включая добавление и суммирование сигналов датчика, приводить к низкой надежности при обнаружении внешних возмущений в противоположность внутренним разрядам. Также обнаружено, что в некоторых вариантах осуществления, датчики, когда они подвергаются сжимающему усилию при установке на тестируемый объект, могут приобретать индуктивность, которая отличается от номинального значения. Это обстоятельство, а также производственный разброс параметров датчика приводит к схеме настройки, вызывающей расстройку датчика. В результате это приводит к ухудшению отношения сигнал/шум для сигнала,который необходимо впоследствии обрабатывать в оборудовании для оценки, которое, в свою очередь, требует регулировки и настройки датчика посредством элементов регулировки,предусмотренных для этой цели. Сущность изобретения Задача изобретения заключается в том,чтобы выполнить устройство вида, указанного во введении, которое позволяет просто, безопасно и надежно выявить различие между, с одной стороны, частичными разрядами в заданном элементе оборудования и, с другой стороны, внешними возмущениями и частичными разрядами в подсоединенных элементах оборудования или тестируемом оборудовании для того конкретно, чтобы в тех случаях, где физическое расстояние между датчиками является большим, можно было бы безопасно и надежно 4 определить местоположение возможного частичного разряда в заданном элементе оборудования. То, что характеризует устройство согласно изобретению станет ясно из прилагаемой формулы изобретения. Преимущественные усовершенствования изобретения станут ясными из следующего описания и формулы изобретения. Краткое описание чертежей Сущность изобретения иллюстрируется со ссылкой на сопроводительные чертежи, на которых: фиг. 1 А-1 В схематически изображают продольный разрез тестируемого объекта, представленного в виде электрического кабельного соединения; фиг. 2 А-2 С - в виде блок-схемы различные варианты осуществления изобретения; фиг. 3 А - в виде блок схемы вариант осуществления блока настройки, согласно изобретению; фиг. 3 В-3 С - в виде блок-схем различные варианты осуществления блоков задержки, согласно изобретению; фиг. 4 А-4 В - схематически части схемы соединений для вариантов осуществления блока настройки, согласно изобретению; фиг. 5 А-5 Н и 5J - схематически основной вид форм сигналов в случае внешнего возмущения и в случае частичного разряда в тестируемом объекте соответственно, согласно варианту осуществления изобретения (фиг. 2 А); фиг. 6A-6F - схематически основной вид форм сигналов в случае внешнего возмущения и в случае частичного разряда в тестируемом объекте соответственно, согласно варианту осуществления изобретения (фиг. 2 В), и фиг. 7 А-7 В - схематически основной вид форм сигналов в случае внешнего возмущения и в случае частичного разряда в тестируемом объекте соответственно, согласно варианту осуществления изобретения (фиг. 2 С). Подробное описание предпочтительного варианта осуществления На фиг. 1A схематически изображен продольный разрез тестируемого объекта 3, который представляет собой электрическое кабельное соединение. Кабельное соединение содержит два конца 1 а и 1b кабеля, каждый из которых образует часть электрического кабеля. В способе, который известен в технике, концы кабеля подсоединены друг к другу, и соединение содержит втулку 11 и заземленный экран 12, причем соединение окружает втулка и части концов кабеля. Концы кабеля образуют электрические соединительные провода, которые подводятся к тестируемому объекту. Первый и второй датчик 2 а и 2b соответственно размещены внутри экрана на одной стороне каждой втулки. Фигура изображает случай, где экран расположен отдельно от втулки, что является 5 преимуществом при размещении датчиков на концах кабеля, при наблюдении в продольном направлении кабеля между втулкой и экраном. Первый и вторые датчики расположены на первом взаимном расстоянии L1. Датчики имеют вид, известный в технике, который позволяет произвести направленную чувствительную регистрацию импульсов тока через соединительные провода за счет регистрации магнитного поля, которое образуется под действием импульсов тока. В этом варианте осуществления датчики выполнены в виде катушек Роговского,которые на фигуре показаны схематически в поперечном сечении, и каждый из которых окружен одним из соединительных проводов. При рассмотрении катушки Роговского в этом контексте предполагается, что катушка размещается таким способом в электрическом проводнике,что ось катушки направлена, по меньшей мере,по существу в том же самом направлении, что и линии магнитного поля, которое образуется под действием электрического тока вокруг проводника. Каждый один из датчиков вырабатывает сигнал датчика в зависимости от вышеупомянутых импульсов тока и их направления, причем первый датчик вырабатывает сигнал v1 первого датчика и второй датчик вырабатывает сигналv2 второго датчика. На фиг. 2 А изображена блок-схема, согласно варианту осуществления изобретения. На фигуре изображен тестируемый объект 1 с соединительными проводами 1 а, 1b, датчики 2 а,2b и оборудование EVU для оценки, которое будет подробно описано ниже. Оборудование для оценки содержит первый блок настройки Т 1, связанный с первым датчиком, и блок настройки Т 2, связанный со вторым датчиком того же самого вида, как и первый блок настройки,умножительный элемент MU и блок COU обработки сигналов. Датчики размещаются таким способом,чтобы напряжения одинаковой полярности вырабатывались на отводах катушек, которые отмечены на фигуре точками, при протекании импульсов тока через соединительные провода в таком направлении, при котором они проходят через катушки от конца катушек, который отмечен точкой, к их немаркированному концу. Для ясности, на фиг. 2 А изображены катушки в виде удлиненных катушек вдоль соответствующего соединительного провода. Сигнал v1 первого датчика подается через двухпроводный кабель 3 а датчика на первый блок настройки, который формирует в зависимости от этого сигнала сигнал SF1 первого фильтра. Сигнал v2 второго датчика подается через двухпроводный кабель 3b датчика на второй блок настройки, который формирует в зависимости от этого сигнала сигнал SF2 второго фильтра. Сигналы фильтра подаются на умножительный элемент, который формирует в зави 001639 6 симости от этого сигнала сигнал SP умножения,который подается в блок обработки сигнала. Блок обработки сигнала формирует сигнал IND показания в зависимости от сигнала умножения. Тестируемый объект подсоединен к электрической схеме (не показано) в электрическом оборудовании и подключен во время работы к электрической сети, которая обычно имеет частоту 50 или 60 Гц. Электрический разряд, т.е. частичный разряд, в системе изоляции тестируемого объекта или элемента оборудования вызывает импульс тока, который за счет разветвления распределяется в схемах оборудования, и следовательно также проходит через соединительные провода тестируемого объекта. Если такой разряд возникает в элементе оборудования вне тестируемого объекта, то импульс тока, связанный с ним через соединительные провода тестируемого объекта, в зависимости от полярности разряда пройдет в тестируемый объект через соединительные провода 1 а и из него через соединительные провода 1b, или наоборот. Обычно тестируемый объект имеет полное сопротивление,которое в диапазоне частот, соответствующем для регистрации импульсов тока, ослабляет амплитуду импульсов тока, и/или сдвинутых по фазе, которые протекают через тестируемый объект по своим соединительным проводам. Расстояние L1 между датчиками таким образом приводит в результате к сигналам первого и второго датчиков, которые появляются на взаимном первом интервале Т 1' времени. Если с другой стороны такой разряд происходит в тестируемом объекте, разряд приведет к возникновению импульса тока, связанного с ним, который потечет через два соединительных провода в направлении от тестируемого объекта или в направлении к тестируемому объекту. Направление протекания тока от или к тестируемому объекту определяется полярностью разряда. Импульсы тока, возникающие от того же самого разряда, вызовут таким образом сигналы датчика со взаимным интервалом времени, который зависит от того, где внутри тестируемого объекта происходит разряд, однако,интервал времени не превышает вышеупомянутый первый интервал Т 1' времени. На фиг. 3 А изображена блок-схема, согласно варианту осуществления изобретения,первого блока Т 1 настройки. Блок содержит элемент IMPD1 согласования полного сопротивления, подсоединенный к кабелю 3 а датчика,резонансный контур RESD1, усилительный элемент АМР 1 и элемент BPD1 полосовой фильтрации. Сигнал первого датчика подается в резонансный контур, выходной сигнал SRES1 которого подается в усилительный элемент АМР. С его выхода сигнал подается на элемент полосовой фильтрации, который в зависимости от подаваемых сигналов формирует сигнал SF1 пер 7 вого фильтра. Второй блок Т 2 настройки является тем же самым по виду, как и первый блок настройки, и содержит элемент IMPD2 согласования полного сопротивления, подсоединенный к кабелю 3b датчика, резонансный контурRESD2, который формирует выходной сигналSRES2, усилительный элемент АМР 2 и элементBPD2 полосовой фильтрации, который формирует сигнал SF2 второго фильтра. Элемент согласования полного сопротивления имеет полное сопротивление, равное характеристическому полному сопротивлению кабеля датчика, и следовательно позволяет получить концевую заделку кабеля датчика с отсутствием отражений. Резонансный контур и элемент BPD полосовой фильтрации настроен на параллельный резонанс с круговой частотойили содержит в своей полосе пропускания круговую частоту ,которая относится к первому интервалу Т 1' времени, выбранному так, чтобы ее период ТР был намного больше, чем этот интервал Т 1' времени. Значение интервала времени Т 1' составляет обычно порядка сотен микросекунд, а круговую частотувыбирают и определяют с учетом таких факторов, как место возникновения любых возмущений с определенными частотами, индуктивность датчиков и предполагаемый состав частот сигналов датчиков, предпочтительно соответствующий частотам в диапазоне от 10 кГц до 10 МГц. В предпочтительном варианте осуществления резонансная частота содержит параллельное соединение индуктивного и емкостного элемента полного сопротивления. Кроме того, предполагается, что резонансный контур выполнен с временем TD затухания, которое намного больше, чем первая временная задержка Т 1, обычно соответствующая, по меньшей мере, двум или трем периодам ТР. На фиг. 5 А, 5 В, 5 Е, 5F, 5G, 5 Н и 5J схематически изображен по вертикальной оси, последовательно по соответствующим осям, основной вид форм сигналов для вышеупомянутых сигналов v1 и v2 датчиков, выходные сигналыSRES1, SRES2 от резонансных контуров RESD1 и RESD2, соответственно сигналы SF1 и SF2 фильтров и сигнал SP умножения в зависимости от времени, которое показано по горизонтальной оси. Фигура относится к случаю, где частичный разряд возникает в тестируемом объекте между датчиками. На фиг. 5 А и 5 В изображено, что сигналы датчиков в этом случае имеют противоположную полярность, причем каждый образует выходной сигнал от соответствующих резонансных контуров, как показано на фиг. 5 Е и 5F соответственно. После полосовой фильтрации сигналы SF1 и SF2 первого и второго фильтров соответственно будут иметь колебания, которые показаны на фиг. 5G и 5 Н соответственно. Сиг 001639 8 нал умножения имеет вид, изображенный на фиг. 5J, т.е. с отрицательной полярностью пульсирующего колебания. На фиг. 6 А и 6 В схематически изображен по вертикальной оси последовательно один за другим по соответствующим осям вид основной гармоники форм сигналов для сигналов v1 и v2 датчиков в зависимости от времени, которое показано вдоль горизонтальной оси. Фигуры относятся к случаю, где внешнее возмущение,например импульс тока, образуется под действием частичного разряда в элементе оборудования, которое подсоединено к тестируемому объекту, и проходит через него. На фиг. 6 А и 6 В изображено, что в этом случае сигналы датчика будут иметь одинаковую полярность, которая означает, что при полярностях, показанных на фигурах, выходной сигнал SRES1 (фиг. 5 Е) будет иметь в этом случае обратную полярность по отношению к той,которая показана на чертеже. Соответствующий случай применим к сигналу SF1 первого фильтра, и следовательно в этом случае сигнал SP умножения будет иметь пульсирующее колебание с положительной полярностью. Блок показаний можно преимущественно выполнить в виде, известном в технике, который содержит пиковый детектор, который регистрирует пиковое значение сигнала умножения,и формирует сигнал показания в зависимости от этого пикового значения. С другой стороны,блок показаний можно выполнить в виде элемента с фильтрацией нижних частот с постоянной времени, адаптированной на резонансную частоту резонансных контуров, который формирует сигнал показания в зависимости от выходного сигнала этого элемента с фильтрацией нижних частот. Сигнал показания подается в оборудование (не показано на фигуре) для дальнейшей оценки с помощью способа, известного специалистам, например, с помощью сравнения с сигналом сравнения. На фиг. 2 В изображено усовершенствование изобретения, которое имеет особое преимущество по отношению к подавлению внешних возмущений. Оно отличается от варианта осуществления, описанного со ссылкой на фиг. 2 А, тем, что оборудование для оценки содержит первый блок D1 задержки, связанный с первым датчиком, и второй блок D2 задержки, связанный со вторым датчиком. На первый блок задержки подается сигнал первого датчика и задержанный сигнал v2d второго датчика, который будет более подробно описан ниже. На второй блок задержки подается сигнал второго датчика и задержанный сигнал v1d с первого датчика, который будет более подробно описан ниже. Первый блок задержки формирует в качестве выходного сигнала сигнал SME1 первого измерения и задержанный сигнал первого датчика, и второй блок задержки формирует в качестве выходного сигнала сигнал SME2 второго 9 измерения и задержанный сигнал второго датчика. Сигнал первого измерения подается на первый блок настройки, который формирует сигнал первого фильтра в зависимости от него,и сигнал второго измерения подается на второй блок настройки, который формирует сигнал второго фильтра в зависимости от него. На фиг. 3 В изображен вариант осуществления первого и второго блоков задержки. Первый блок задержки содержит элемент 4 а задержки и элемент 5 а, формирующий разностный сигнал, на которые подается сигнал v1 первого датчика. Элемент задержки формирует в качестве выходного сигнала задержанный сигнал v1d первого датчика, который соответствует первому сигналу датчика, но задержанный на дополнительную первую временную задержку Т 1, предпочтительно равную вышеупомянутому первому интервалу Т 1' времени. Второй блок задержки содержит элемент 4b задержки и элемент 5b, формирующий разностный сигнал, на которые подается сигнал v2 второго датчика. Элемент 4b задержки формирует в качестве выходного сигнала задержанный сигнал v2d второго датчика, который соответствует сигналу второго датчика, но задержанный на дополнительную первую задержку во времени. Задержанный сигнал v2d второго датчика также подается на элемент 5 а, формирующий разностный сигнал, который формирует в качестве выходного сигнала сигнал первого измерения в зависимости от разности сигнала первого датчика и задержанного сигнала второго датчика. Задержанный сигнал v1d первого датчика также подается на элемент 5b, формирующий разностный сигнал, который формирует в качестве выходного сигнала сигнал второго измерения в зависимости от разности сигнала второго датчика и задержанного сигнала первого датчика. Блоки Т 1 и Т 2 настройки в настоящем варианте осуществления могут представлять собой преимущественно вид, который описан со ссылкой на фиг. 3 А. На фиг. 5 А - 5 Н и 5J схематически изображен по вертикальной оси, последовательно друг за другом по соответствующим осям, основной вид форм сигналов для сигналов v1 и v2 датчиков, для вышеупомянутых задержанных сигналов v1d и v2d датчиков, выходные сигналыSRES1, SRES2, поступающие из резонансных контуров RESD1 и RESD2 соответственно сигналы SF1 и SF2 фильтров и сигнал SP умножения в зависимости от времени, которое показано вдоль горизонтальной оси. Фигура относится к случаю, где частичный разряд возникает в тестируемом объекте между датчиками. Кроме того, предполагается, что первая временная задержка Т 1 выбрана равной первому временному интервалу T1'. Из фиг. 5A-5D будет ясно, что в этом случае сигнал SME1 первого измерения будет со 001639 10 держать сигнал v1 первого датчика и задержанный на первую временную задержку Т 1 и с обратной полярностью сигнал v2 второго датчика. Соответствующее рассуждение применимо и к сигналу SME2 второго измерения. Так как первая временная задержка намного меньше, чем период для резонансных частот резонансных контуров, выходные сигналы SRES1,SRES2, поступающие из резонансных контуровSF2 фильтров и сигнал SP умножения будут иметь практически такой же вид, как и на фиг. 5 Е-5 Н и 5J. На фиг. 6C-6F схематически показан по вертикальной оси последовательно сверху вниз по соответствующим осям основной вид форм сигналов для вышеупомянутых сигналов v1 и v2 датчиков, и выходных сигналов SRES1, SRES2,поступающих из резонансных контуров RESD1 и RESD2 соответственно в зависимости от времени, которое показано вдоль горизонтальной оси. Фигуры относятся к случаю, где внешнее возмущение, например частичный разряд в элементе оборудования, подсоединенном к тестируемому объекту, проходит через него в направлении от соединительного провода 1 а к соединительному проводу 1b, так что, как изображено на фиг. 6C-6D, сигнал v2 второго датчика становится задержанным на первый интервал Т 1' времени относительно первого датчика сигнала v1 первого датчика. Понятно, что в этом случае сигнал SME1 первого измерения будет содержать сигнал v1 первого датчика и задержанный дважды на первый интервал времени и с обратной полярностью сигнал v2 второго датчика. Сигнал SME2 второго измерения будет содержать сигнал v2 второго датчика и задержанный на первый интервал времени и с обратной полярностью сигнал v1 первого датчика,причем эти два сигнала, таким образом, по существу исключают друг друга. Выходной сигнал SRES1, поступающий из резонансного контура RESD1, будет, таким образом, иметь колебание как на фиг. 6 Е, тогда как выходной сигналSRES2, поступающий из резонансного контураRESD2 (фиг. 6F), остается по существу нулевым. Таким образом в этом случае сигнал SP умножения остается нулевым. На фиг. 2 С изображен дополнительный вариант осуществления изобретения, который является преимущественным по отношению к подавлению внешних возмущений. В этом варианте осуществления устройство содержит третий и четвертый датчики 2 с и 2d соответственно того же самого вида, как и первый и второй датчики,посредством чего третий датчик 2 с находится на том же самом соединительном проводе, как и первый датчик, и вырабатывает сигнал v3 третьего датчика, а четвертый датчик 2d находится на том же самом соединительном проводе, что и второй датчик, и вырабатывает сигналv4 четвертого датчика. Первый и второй датчики расположены на первом взаимном расстоянии L1, первый и третий датчики расположены на втором взаимном расстоянии L2, и второй и четвертый датчики расположены на третьем взаимном расстоянии L3. По аналогии с тем, что было описано выше, второе и третье расстояния соответствуют второму интервалу Т 2' времени и третьему интервалу Т 3' времени соответственно для сигналов датчиков, которые вырабатываются в зависимости от импульса тока, который проходит через тестируемый объект по своим соединительным проводам. На фиг. 1 В изображено физическое расположение датчиков в местах соединений кабеля того же вида, что описан со ссылкой на фиг. 1 А. Так как тестируемый объект состоит из кабельного соединения, расстояние L1 может составлять обычно порядка 1 или 2 м и расстояния L2 и L3 порядка 1 м. Обычно второй интервал Т 2' времени практически равен третьему интервалу Т 3' времени. Все сигналы четвертого датчика подаются в оборудование EVU для оценки (фиг. 2 С), причем сигнал третьего датчика через двухпроводный кабель 3 с датчика и четвертый сигнал датчика через двухпроводный кабель 3d датчика. В этом случае оборудование для оценки содержит дополнительно к блокам T1, T2 настройки, которые описаны выше, умножительный элементMU и блок COU обработки сигналов, блок D3 третьей задержки, связанный с первым и третьим датчиками, и блок D4 четвертой задержки,связанный со вторым и четвертым датчиками. На третий блок задержки подаются сигналы первого и третьего датчиков, который формирует в зависимости от них сигнал SME3 третьего измерения. На четвертый блок задержки подаются сигналы второго и четвертого датчиков,который формирует в зависимости от них сигнал SME4 четвертого измерения. На первый блок настройки подается сигнал третьего измерения, который формирует сигнал первого фильтра в зависимости от них, и на второй блок настройки подается четвертый сигнал измерения, который формирует второй сигнал фильтра в зависимости от него. На фиг. 3 С изображен вариант осуществления третьего и четвертого блоков задержки. Третий блок задержки содержит элемент 4 с задержки, на который подается сигнал третьего датчика и который в качестве выходного сигнала формирует задержанный сигнал v3d третьего датчика, который соответствует сигналу третьего датчика, но задержанный на дополнительную временную задержку Т 2, предпочтительно выбранную равной вышеупомянутому второму интервалу Т 2' времени. Третий блок задержки дополнительно содержит элемент 5 с, формирующий разностный сигнал, на который подается сигнал v1 первого датчика и задержанный 12 сигнал третьего датчика, и который в зависимости от него формирует третий сигнал измерения, в качестве разностного сигнала, сигнал первого датчика и задержанный сигнал третьего датчика. Четвертый блок задержки содержит элемент 4d задержки, на который подается сигнал четвертого датчика и который в качестве выходного сигнала формирует задержанный сигнал v4d четвертого датчика, который соответствует сигналу четвертого датчика, но задержанный на дополнительную третью временную задержку Т 3, предпочтительно выбранную равной вышеупомянутому третьему интервалу Т 3' времени. Четвертый блок задержки дополнительно содержит элемент 5d, формирующий разностный сигнал, на который подается сигнал v2 второго датчика и задержанный сигнал четвертого датчика, и который в зависимости от них формирует четвертый сигнал измерения, в качестве разностного сигнала, сигнал второго датчика и задержанный сигнал четвертого датчика. Блоки Т 1 и Т 2 настройки могут в этом варианте осуществления иметь вид, который описан выше со ссылкой на фиг. 3 А, однако, с отличием в том, что резонансные контуры и элементы полосовой фильтрации в этом случае настроены на параллельный резонанс с круговыми частотами 2 и 3 или содержат в их полосе пропускания круговые частоты 2 и 3,которые относятся ко второму интервалу Т 2' времени и третьему интервалу Т 3' времени и которые предпочтительно выбирают такими,что 2=2/4 Т 2' и 3=2/4 Т 3'. Обычно в этом варианте осуществления изобретения круговые частоты 2 и 3 могут соответствовать частотам в интервале 10-100 МГц. На фиг. 7 А и 7 В схематически изображен по вертикальной оси последовательно сверху вниз по соответствующим осям основной вид форм сигналов для вышеупомянутых сигналовv3d и v4d датчиков, сигналы SME3, SME4 измерений, сигналы SF1 и SF2 фильтров и сигнал SP умножения в зависимости от времени, которое показано вдоль горизонтальной оси. Фиг. 7 А относится к случаю, где внешнее возмущение,например, частичный разряд в элементе оборудования, подсоединенном к тестируемому объекту, передается через него. Фиг. 7 В относится к случаю, где частичный разряд возникает в тестируемом объекте между датчиками. Кроме того, предполагается, что вторая временная задержка Т 2 выбрана равной второму интервалу Т 2' времени, и третья временная задержка Т 3 выбрана равной третьему интервалу Т 3' времени. В примере, изображенном на фиг. 7 А, где внешнее возмущение предположительно первым проходит через третий датчик, третий сигнал SME3 измерения исчезает за счет образования различия в третьем блоке задержки. В слу 13 чае, когда возмущение, которое поступает извне, сначала проходит через четвертый датчик,четвертый сигнал SME4 измерения исчезает за счет образования различия в четвертом блоке задержки. Поэтому сигнал второго или первого фильтра и следовательно сигнал умножения остается нулевым или, по меньшей мере, близким к нулевому. В примере, изображенном на фиг. 7 В, каждый из сигналов измерения будет содержать два импульса с противоположной полярностью и формой, подобной сигналам датчика. Таким образом, основная частота сигнала измерения будет находиться в диапазоне частот, который соответствует резонансной частоте соответствующих резонансных контуров и полосе пропускания элементов полосовой фильтрации,который вызывает сигналы первого и второго фильтров с упомянутой резонансной частотой. Таким образом сигнал умножения приводит к пульсирующему колебанию, вид которого, т.е. его положение фазы и среднее значение, зависит от того, где внутри тестируемого объекта происходит внутренний разряд. Среднее значение сигнала умножения, который формируется некоторым известным способом, может таким образом нести информацию относительно местоположения разряда, при этом сигнал умножения подается в блок обработки сигнала способом,описанным выше. На фиг. 4 А схематически изображены части схемы соединений для варианта осуществления изобретения в соответствии с вышеописанными фиг. 2 В, 3 А и 3 В. Первый датчик 2 а подсоединен к входным выводам усилительного элемента АМР 1 посредством двухпроводного экранированного кабеля 3 а датчика через сопротивления 7 а, 7b, при этом выходной сигнал усилительного элемента АМР 1 подается в элемент BPD1 полосовой фильтрации. Второй датчик 2b подсоединен аналогичным способом к входным выводам усилительного элемента АМР 2 посредством двухпроводного экранированного кабеля 3b датчика через сопротивления 7 е, 7f, при этом выходной сигнал усилительного элемента АМР 2 подается в элемент BPD2 полосовой фильтрации. Кабели датчиков имеют характеристическое полное сопротивление Z, и между двумя проводами в соответствующем кабеле датчика размещаются элементы 6 а, 6b полного сопротивления соответственно с полным сопротивлением Z, получая таким образом соединения кабелей датчика без отражений. Таким образом, по меньшей мере, при идеальных условиях схемы, подсоединенные к кабелям датчиков, как видно из соответствующего датчика, будут проявлять чисто резистивное полное сопротивление. На входных выводах соответствующего усилительного элемента существует соединенный параллельно резонансный контур, содержащий катушку 8 а индуктивности и конденсатор 9 а, соответственно катуш 001639 14 ку 8b индуктивности и конденсатор 9b, соответствующий резонансному контуру RESD, описанному со ссылкой на фиг. 3 В, и выбранному так, чтобы выполнялись условия резонанса,описанные выше. Кабель 4 а задержки подсоединяется к кабелю 3 а датчика, причем этот кабель задержки является того же самого вида, как и кабель датчика, и с длиной, адаптированной для того, чтобы обеспечить временную задержку Т 1, упомянутую со ссылкой на фиг. 3 С. Получение разности в элементе 5 а, формирующем разностный сигнал, который описан со ссылкой на фиг. 3 С, достигается в этом варианте осуществления с помощью подсоединения кабеля 4 а задержки через сопротивления 7 с, 7d к входным выводам усилительного элемента АМР 2. Аналогичным способом кабель 4b задержки подсоединяется к кабелю 3b датчика, причем этот кабель задержки подсоединяется через сопротивления 7g, 7h к входным выводам усилительного элемента АМР 1. Сопротивления 7a-7h выбраны соответственно со значениями сопротивления намного больше, чем значения полного сопротивления для элементов 6 а, 6b полного сопротивления, и сопротивления 7 с и 7g можно преимущественно выполнить с возможностью регулировки для того, чтобы адаптировать датчики к разбросу параметров, который возникает при их производстве. На фиг. 4 В схематически изображены части схемы соединений для варианта осуществления, согласно изобретению, которая содержит элемент IMPD согласования полного сопротивления, элемент BPD1 полосовой фильтрации и усилительный элемент АМР 1, элементы которого входят в схему настройки (фиг. 3 А). Датчик 2 а подсоединен через кабель 3 а датчика к последовательному резонансному контуру, который подсоединен между двумя проводами кабеля и содержит сопротивление 13 а, конденсатор 13b и катушку 13 с индуктивности. Подобным способом между двумя проводами кабеля последовательно подсоединены сопротивление 14 а, конденсатор 14b и дополнительное сопротивление 14 с. Два вывода конденсатора 14b подсоединены через соответствующие электрические проводники 15 а, 15b к соответствующим отводам 16b, 16d соответственно катушки 16 индуктивности с магнитным сердечником. Катушка 16 индуктивности имеет выводы 16 а и 16 е и средний отвод 16 с, который подсоединен через проводник 15 с к общей точке зануления сигнала в блоке настройки. Между выводом 16 а и отводом 16b размещаются витки n2 обмотки катушки, между отводами 16b и 16 с размещаются витки n1, между отводами 16 с и 16d размещаются витки n1, и между отводом 16d и выводом 16 е размещаются витки n2 обмотки катушки. Выводы 16 а и 16 е подсоединены соответствующими проводниками 17 а, 17b соответственно через сопротивления 18 а, 18b к входным выводам усилительного элемента АМР 1. 15 Сопротивление 13 а имеет полное сопротивление Z, равное характеристическому полному сопротивлению кабеля датчика, тогда как элементы 14 а и 14 с полного сопротивления, каждый из которых имеет полное сопротивление равное Z/2. Катушка 16 индуктивности, расположенная между отводами 16b и 16d, имеет индуктивность L2 и образует вместе с конденсатором 14b параллельный резонансный контур,который настроен так, чтобы элемент полосовой фильтрации имел полосу пропускания в соответствии с условиями, описанными выше. Последовательный резонансный контур, образованный из элемента 13 а полного сопротивления,конденсатора 13b и катушки 13 с индуктивности,настроен так, чтобы обеспечить совместно с упомянутым параллельным резонансным контуром постоянное полное сопротивление во всем диапазоне частот, соответствующем регистрации. В варианте осуществления (фиг. 4 В) полоса пропускания в диапазоне частот, представляющего интерес для тестируемого объекта, во время испытания становится независимой от допусков и разброса параметров индуктивности датчика и длины кабеля датчика. Кроме того,катушка 16 индуктивности обеспечивает свободные от шумов предварительное усиление сигнала датчика при отношении числа витковn2/n1 порядка пяти. Для защиты элементов, входящих в блок настройки, от перенапряжения подсоединяют газоразрядные трубки 19 а, 19b между соответствующими проводами кабеля датчика и землей и диодные группы 20 а, 20b, 21a, 21b, каждая из которых содержит два подсоединенных параллельно навстречу друг другу диода, которые подсоединены между нулем и соответствующими проводниками 15 а, 15b и входными выводами усилительного элемента. Изобретение не ограничено показанными вариантами осуществления и возможно множество модификаций в пределах объема концепции изобретения. Устройство содержит логические схемы и схемы задержки, показанные на чертежах в виде блок-схем, которые могут быть полностью или частично выполнены в виде аналоговых или цифровых электрических схем или состоять из программных функций, например, в микропроцессорах, программируемых для этой цели. В этом контексте следует понимать, что входные и выходные сигналы в соответствующих схемах могут состоять из электрических/логических сигналов или значений вычислений. Также элементы задержки, описанные со ссылкой на фиг. 3 В и 3 С, могут быть преимущественно выполнены в виде кабелей того же самого или подобного вида, как и кабель датчика,адаптированный к подходящей длине. 16 Катушка 16 индуктивности, описанная со ссылкой на фиг. 4 В, может быть выполнена без магнитного сердечника. Отношение между частотами 2 и 3 настройки и вторым и третьим интервалами времени, соответственно описанными со ссылкой на вариант осуществления (фиг. 2 С), выбирают так, чтобы достигнуть наибольшей чувствительности устройства регистрации. В принципе,можно также получить удовлетворительную чувствительность при частотах настройки в три,пять, семь раз и так далее выше, чем упомянутое отношение. Датчики могут быть также основаны на других известных по существу принципах, которые обеспечивают направленную регистрацию чувствительности магнитного поля, которое возникает под действием импульсов тока,например, содержащие элементы Холла, магниторезистивные элементы или сверхпроводящие элементы, например, так называемый сверхпроводящий квантовый интерференционный датчик(СКВИД (SQUID. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для регистрации электрических разрядов в тестируемом объекте (1) с двумя электрическими соединительными проводниками (1a, 1b, 1c, 1d), предпочтительно в кабельном соединении, содержащее оборудование(EVU) для оценки и, по меньшей мере, один первый и один второй датчик (2 а, 2b, 2c, 2d),каждый из которых предназначен для направленно-чувствительной регистрации импульсов тока, протекающих через соответствующий один из соединительных проводников, путем регистрации магнитного поля, возникающего под действием импульсов тока, для выработки и подачи сигналов датчиков в оборудование для оценки в зависимости от импульсов тока и их направления, причем первый датчик вырабатывает сигнал (v1) первого датчика и второй датчик вырабатывает сигнал (v2) второго датчика,при этом первый и второй датчики расположены на первом взаимном расстоянии (L1), соответствующем первому интервалу (Т 1') времени для сигналов датчиков, возникающих от импульса тока, который проходит через тестируемый объект, и причем оборудование для оценки в зависимости от полученных сигналов датчиков вырабатывает сигнал (IND) показания, показывающий электрический разряд в тестируемом объекте в случае, когда датчики регистрируют импульсы тока, которые протекают в направлении от тестируемого объекта через два соединительных проводника или в направлении к тестируемому объекту через два соединительных проводника, отличающееся тем, что оборудование для оценки содержит первый блок (Т 1) настройки, связанный с первым датчиком, и второй блок (Т 2) настройки, связанный со вто 17 рым датчиком, при этом каждый блок в зависимости от соответствующего сигнала датчика формирует сигнал (SF1) первого фильтра и сигнал (SF2) второго фильтра соответственно, каждый из которых совершает периодическое колебание с заданным периодом времени (ТР), который длиннее, чем первый интервал времени, а также умножительный элемент (MU), на который подается и в котором формируется сигнал(SP) умножения в зависимости от сигналов фильтров, и тем, что оборудование для оценки формирует сигнал показания в зависимости от сигнала умножения. 2. Устройство по п.1, отличающееся тем,что каждый блок настройки содержит резонансный контур (RESD1, RESD2), настроенный на резонанс с круговой частотой, соответствующей периоду времени, при этом резонансные контуры имеют время (TD) затухания, соответствующее, по меньшей мере, двум периодам предварительно выбранного периода (ТР) времени,причем на каждый из резонансных контуров подается сигнал, сформированный в зависимости от соответствующего сигнала датчика, и каждый из блоков настройки формирует соответствующий сигнал фильтра в зависимости от выходного сигнала соответствующего резонансного контура. 3. Устройство по любому из п.1 или 2, отличающееся тем, что каждая схема настройки содержит элемент (BPD1, BPD2) полосовой фильтрации с полосой пропускания, которая содержит круговую частоту, соответствующую периоду времени, и с шириной полосы пропускания, соответствующей времени затухания,при этом на каждый из элементов полосовой фильтрации подается сигнал, сформированный в зависимости от соответствующего сигнала датчика, и каждая из схем настройки формирует соответствующий сигнал фильтра в зависимости от выходного сигнала соответствующего элемента полосовой фильтрации. 4. Устройство по любому из пп.1-3, отличающееся тем, что соответствующий сигнал датчика подается в оборудование для оценки через линию (3 а, 3b, 3 с, 3d) передачи, связанную с каждым из датчиков, причем элемент (IMPD,6 а, 6b) согласования полного сопротивления подсоединен к соответствующей линии передачи, полное сопротивление концевой части которой, по меньшей мере, приблизительно равно характеристическому полному сопротивлению(Z) этой линии передачи. 5. Устройство по любому из пп.1-4, отличающееся тем, что оборудование для оценки содержит первый блок (D1) задержки, связанный с первым датчиком, и второй блок (D2) задержки, связанный со вторым датчиком, при этом первый блок задержки формирует первый сигнал (SME1) измерения в зависимости от разности сигнала первого датчика и сигнала второго датчика, задержанного на дополнительную первую временную задержку (Т 1'), и второй блок задержки формирует второй сигнал(SME2) измерения в зависимости от разности второго сигнала датчика и первого сигнала датчика, задержанного на первую временную задержку, и тем, что первый сигнал измерения подается на первый блок настройки, который формирует сигнал первого фильтра в зависимости от него, и тем, что второй сигнал измерения подается на второй блок настройки, который формирует сигнал второго фильтра в зависимости от него. 6. Устройство по любому из пп.1-5, отличающееся тем, что первый и второй блоки настройки формируют сигналы первого и второго фильтра соответственно, осуществляющие колебания с периодом, соответствующим частоте,находящейся в интервале от 10 кГц до 10 МГц. 7. Устройство по пп.1-4, отличающееся тем, что содержит третий и четвертый датчик(2 с, 2d соответственно) для направленночувствительной регистрации импульсов тока,протекающих через соответствующий соединительный проводник, причем третий датчик расположен на том же самом соединительном проводнике, как и первый датчик, который вырабатывает и подает в оборудование для оценки сигнал (v3) третьего датчика, и четвертый датчик, расположенный на том же самом соединительном проводнике, как и второй датчик, который вырабатывает и подает в оборудование для оценки сигнал (v4) четвертого датчика, при этом первый и третий датчики расположены на втором взаимном расстоянии (L2), которое соответствует второму интервалу (T2') времени для сигналов датчиков, возникающих от импульса тока, который проходит через тестируемый объект, а второй и четвертый датчики расположены на третьем взаимном расстоянии (L3), которое соответствует третьему интервалу (T3') времени для сигналов датчиков, возникающих от импульса тока, который проходит через тестируемый объект, а третий блок (D3) задержки, связанный с третьим датчиком, и четвертый блок(D4) задержки, связанный с четвертым датчиком, причем третий блок задержки формирует третий сигнал (SME3) измерения в зависимости от разности сигнала первого датчика и сигнала третьего датчика, задержанного на дополнительную вторую временную задержку (Т 2), а четвертый блок задержки формирует четвертый сигнал (SME4) измерения в зависимости от разности сигнала второго датчика и сигнала четвертого датчика, задержанного на дополнительную третью временную задержку (Т 3), что третий сигнал измерения подается на первый блок настройки, который формирует сигнал первого фильтра в зависимости от него, что четвертый сигнал измерения подается на второй блок настройки, который формирует сигнал второго фильтра в зависимости от него. 8. Устройство по п.7, отличающееся тем,что первый и второй блоки настройки формируют сигналы первого и второго фильтров соответственно, колеблющиеся с периодом времени,который в четыре раза больше, чем второй интервал времени, а второй интервал времени, по меньшей мере, приблизительно равен третьему интервалу времени. 9. Устройство по любому из пп.5-6, отличающееся тем, что блоки задержки состоят из кабеля (4 а, 4b). 10. Устройство по любому из пп.1-9, отличающееся тем, что каждый блок настройки содержит последовательный резонансный контур(13 а, 13b, 13 с), соединенный параллельно с парaллельным резонансным контуром (14b, 16),на которые подается соответствующий сигнал датчика, и которые настраиваются так, чтобы проявлять к нему постоянное полное сопротивление во всем диапазоне частот, который относится к регистрации. 11. Устройство по любому из пп.1-10, отличающееся тем, что каждый датчик содержит,по меньшей мере, одну катушку (2 а, 2b, 2 с, 2d) Роговского, размещенную вокруг соединительного проводника.
МПК / Метки
МПК: G01R 31/12
Метки: разрядов, предпочтительно, регистрации, тестируемых, электрических, устройство, кабельном, объектах, соединении
Код ссылки
<a href="https://eas.patents.su/13-1639-ustrojjstvo-dlya-registracii-elektricheskih-razryadov-v-testiruemyh-obektah-predpochtitelno-v-kabelnom-soedinenii.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство для регистрации электрических разрядов в тестируемых объектах, предпочтительно, в кабельном соединении</a>
Устройство для обнаружения электрических разрядов в объекте испытаний
Номер патента: 68
Опубликовано: 25.06.1998
Авторы: Эрикссон Томас, Кхейрманд Акбар, Дальберг Ларс-Гуннар, Сиберг Хенри, Бенгтссон Торд, Винклер Даг, Рудольфссон Дик, Лейон Матс
МПК: G01R 31/08
Метки: испытаний, электрических, устройство, разрядов, обнаружения, объекте
Формула / Реферат:
1. Устройство для обнаружения электрических разрядов в объекте испытаний, имеющем, по меньшей мере, два соединительных проводника, содержащее, по меньшей мере, два преобразователя для обнаружения протекающих через соединительные проводники импульсов тока путем регистрации магнитного поля, создаваемого этими импульсами тока, со средствами определения направления этих импульсов тока путем регистрации полярности магнитного поля, отличающееся тем,...
Способ контроля частичных разрядов в электрическом силовом трансформаторе
Номер патента: 19
Опубликовано: 30.12.1997
Авторы: Лейон Матс, Эриксон Томас
МПК: G01R 31/02
Метки: способ, частичных, разрядов, контроля, трансформаторе, электрическом, силовом
Формула / Реферат:
1. Способ контроля частичных разрядов в электрическом силовом трансформаторе (1) при нормальных рабочих условиях, заключающийся в том, что магнитное поле на высоковольтном вводе (2) силового трансформатора воспринимается индуктивным датчиком (6), состоящим из по крайней мере одной катушки (6a,6b), установленной на вводе (2), электрическое поле на вводе (2) воспринимается емкостным датчиком, выходной сигнал от указанных датчиков подается в блок...
Вспомогательное дидактическое учебное устройство, предпочтительно, для использования в начальной школе
Номер патента: 865
Опубликовано: 26.06.2000
Авторы: Вагнер Раймонде, Шуманн Карл-Хайнц, Шульц Хильмар
МПК: G09B 19/02
Метки: использования, школе, начальной, устройство, учебное, вспомогательное, предпочтительно, дидактическое
Формула / Реферат:
1. Вспомогательное дидактическое учебное устройство, предпочтительно для применения в начальной школе, содержащее диски с различными функциями, оснащенные отверстиями и расположенные на основании, а также падающий штырь, отличающееся тем, что над основанием (1), которое по наружному периметру снабжено делениями шкалы разряда единиц и разряда десятков, расположены диск (3) разряда десятков с рукояткой (13) приведения в действие, диск (4) разряда...
Устройство для электропитания и монтажа множества электрических приборов
Номер патента: 1189
Опубликовано: 25.12.2000
Авторы: Канали Паскаль, Пелликано Жозеф
МПК: H01R 9/28
Метки: электрических, приборов, электропитания, множества, монтажа, устройство
Формула / Реферат:
1. Устройство для монтажа и питания множества электрических приборов, например силовых приборов и вспомогательных блоков, закрепленных на монтажном рельсе и имеющих модульные корпуса, примыкающие друг к другу, содержащее общее средство для подключения всех электрических силовых приборов, расположенное параллельно продольному направлению рельса и имеющее последовательность контактных зубцов, расположенных в продольном направлении с заданными...
Устройство для сборки и электрического подсоединения модульных электрических распределительных узлов, таких как выключатели
Номер патента: 1041
Опубликовано: 28.08.2000
Автор: Кэр Жан
МПК: H01R 13/514, H02B 1/20
Метки: подсоединения, узлов, выключатели, распределительных, модульных, электрических, электрического, таких, устройство, сборки
Формула / Реферат:
1. Устройство для сборки и электрического подсоединения модульных распределительных узлов, таких как выключатели, при этом каждый модуль, вмещающий в себя, по меньшей мере, один узел выключения фазы или нейтрали, установлен на опорной рельсе и имеет кожух, примыкающий к соседнему кожуху, устройство содержит средство подсоединения, такое как гребенка, для подсоединения всех распределительных узлов, размещенную параллельно вдоль рельса и имеющую...
Предыдущий патент: Устройство для вывода данных, сохраненных в цифровом виде на носителе информации
Следующий патент: Кольцевой хроматограф
Случайный патент: Смесь для применения в автомобилях