Электродинамический привод
Номер патента: 11246
Опубликовано: 27.02.2009
Авторы: Ломов Сергей Георгиевич, Кирилюк Игорь Олегович, Корогодский Владимир Анатольевич
Формула / Реферат
1. Электродинамический привод, в котором электрическая энергия преобразуется в линейное перемещение толкателя привода, включающий электрическую катушку и электропроводящий якорь, выполненный из неферромагнитного материала, по крайней мере, в той части якоря, в которую проникает магнитное поле катушки, взаимодействующий с катушкой при подключении катушки к импульсному источнику электрической энергии, содержащему конденсатор с подключенным к нему коммутирующим устройством с блоком управления, отличающийся тем, что включает N электрических катушек, при этом N_1, и K электропроводящих якорей, при этом K_1, а коммутирующее устройство выполнено с возможностью обеспечения частичного разряда конденсатора в апериодическом режиме разряда.
2. Электродинамический привод по п.1, отличающийся тем, что коммутирующее устройство выполнено с возможностью обеспечения управления мощностью привода многократным подключением-отключением конденсатора.
3. Электродинамический привод по п.1 или 2, отличающийся тем, что коммутирующее устройство выполнено с возможностью обеспечения позиционирования привода путем подачи серии импульсов тока.
4. Электродинамический привод по пп.1-3, отличающийся тем, что коммутирующее устройство представляет собой транзистор с изолированной базой.
5. Электродинамический привод по пп.1-4, отличающийся тем, что конденсатор представляет собой электролитический конденсатор.
6. Электродинамический привод по пп.1-5, отличающийся тем, что толкателем является электрическая катушка.
7. Электродинамический привод по пп.1-5, отличающийся тем, что толкателем является электропроводящий якорь.
8. Электродинамический привод по пп.1-7, отличающийся тем, что электропроводящий якорь выполнен в виде гильзы.
9. Электродинамический привод по пп.1-7, отличающийся тем, что электропроводящий якорь выполнен в виде диска.
10. Электродинамический привод по п.9, отличающийся тем, что диск выполнен с кольцевой канавкой на торце диска, при этом диск расположен на катушке с обеспечением охвата катушки практически до плоскости симметрии катушки.
11. Электродинамический привод по пп.1-10, отличающийся тем, что катушка имеет обмотку, выполненную из ленты прямоугольного сечения, при этом широкая сторона ленты размещена в плоскости, перпендикулярной оси катушки.
12. Электродинамический привод по пп.1-11, отличающийся тем, что электрическая катушка имеет высоту менее 3 мм.
13. Электродинамический привод по пп.1-12, отличающийся тем, что привод содержит N электрических катушек (N=1) и K электропроводящих якорей (K=1).
14. Электродинамический привод по пп.1-12, отличающийся тем, что содержит N электрических катушек и K+1 электропроводящих якорей.
15. Электродинамический привод по пп.1-12, отличающийся тем, что содержит N+1 электрических катушек и K электропроводящих якорей.
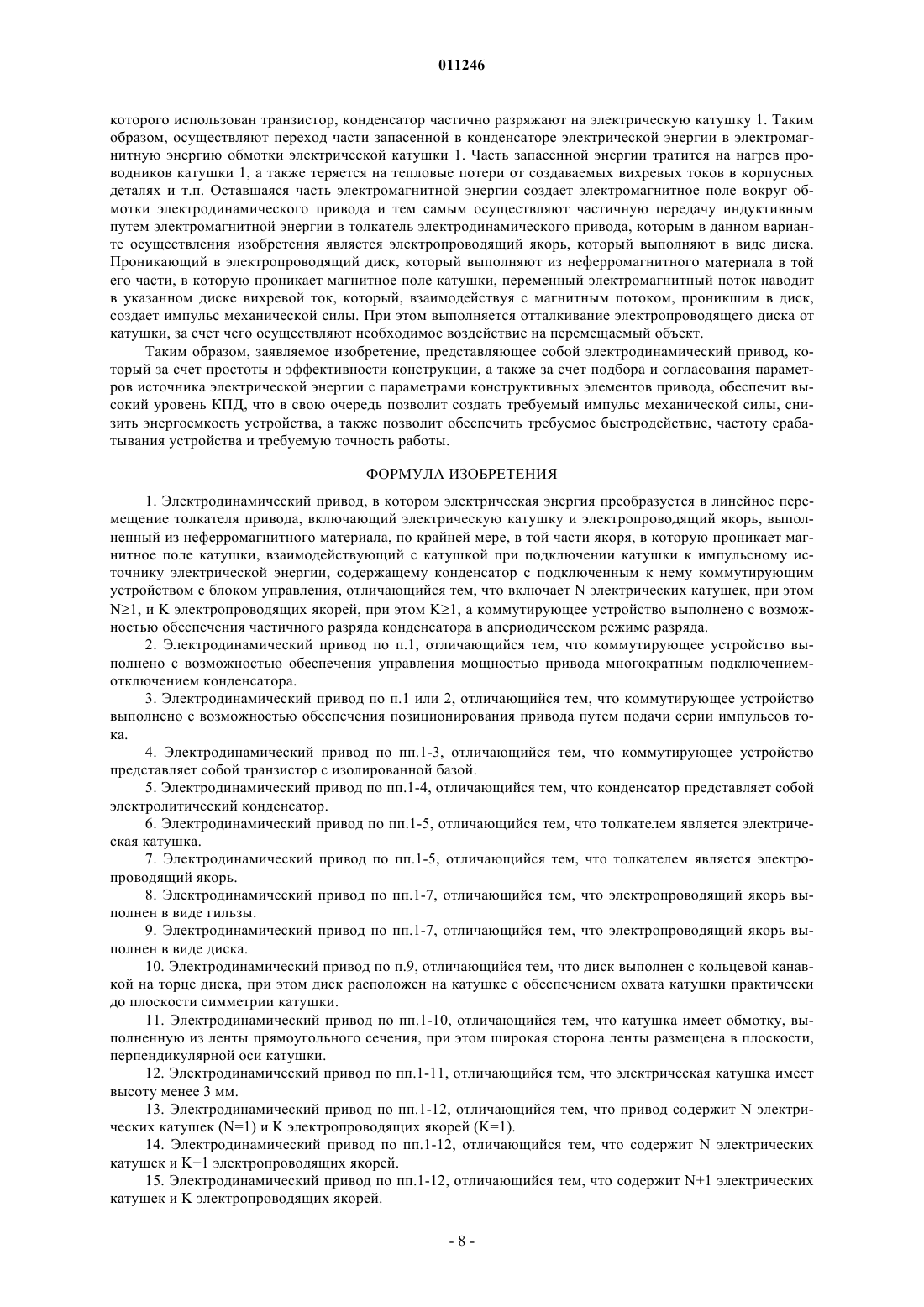
16. Электродинамический привод по пп.1-15, отличающийся тем, что электропроводящий якорь привода выполнен с соотношением между его индуктивным и активным сопротивлениями при эквивалентной действующей частоте не менее 5.
17. Электродинамический привод по п.16, отличающийся тем, что материал якоря имеет удельное омическое сопротивление до 2,7Ч10-8 ОмЧм.

Текст
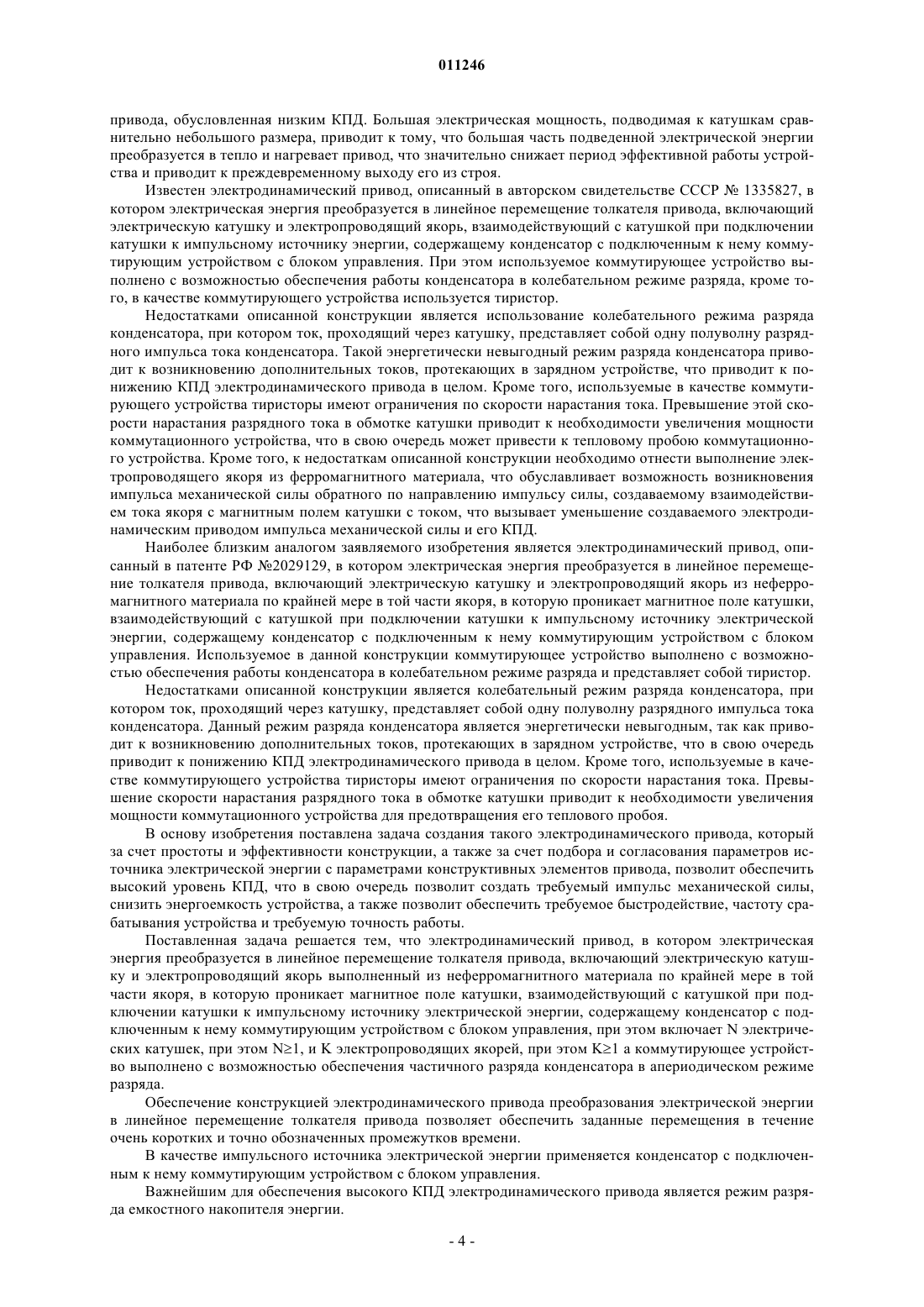
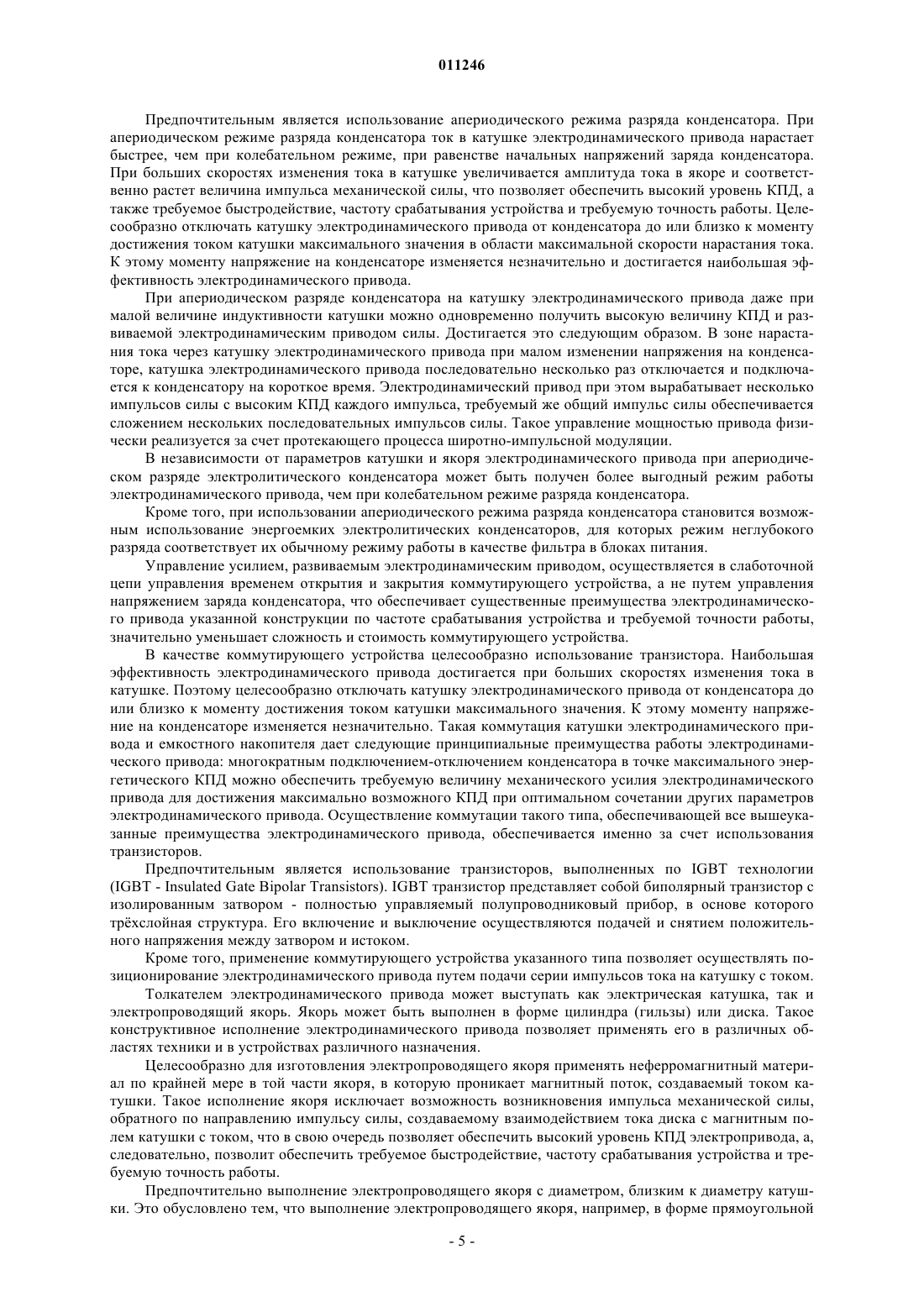
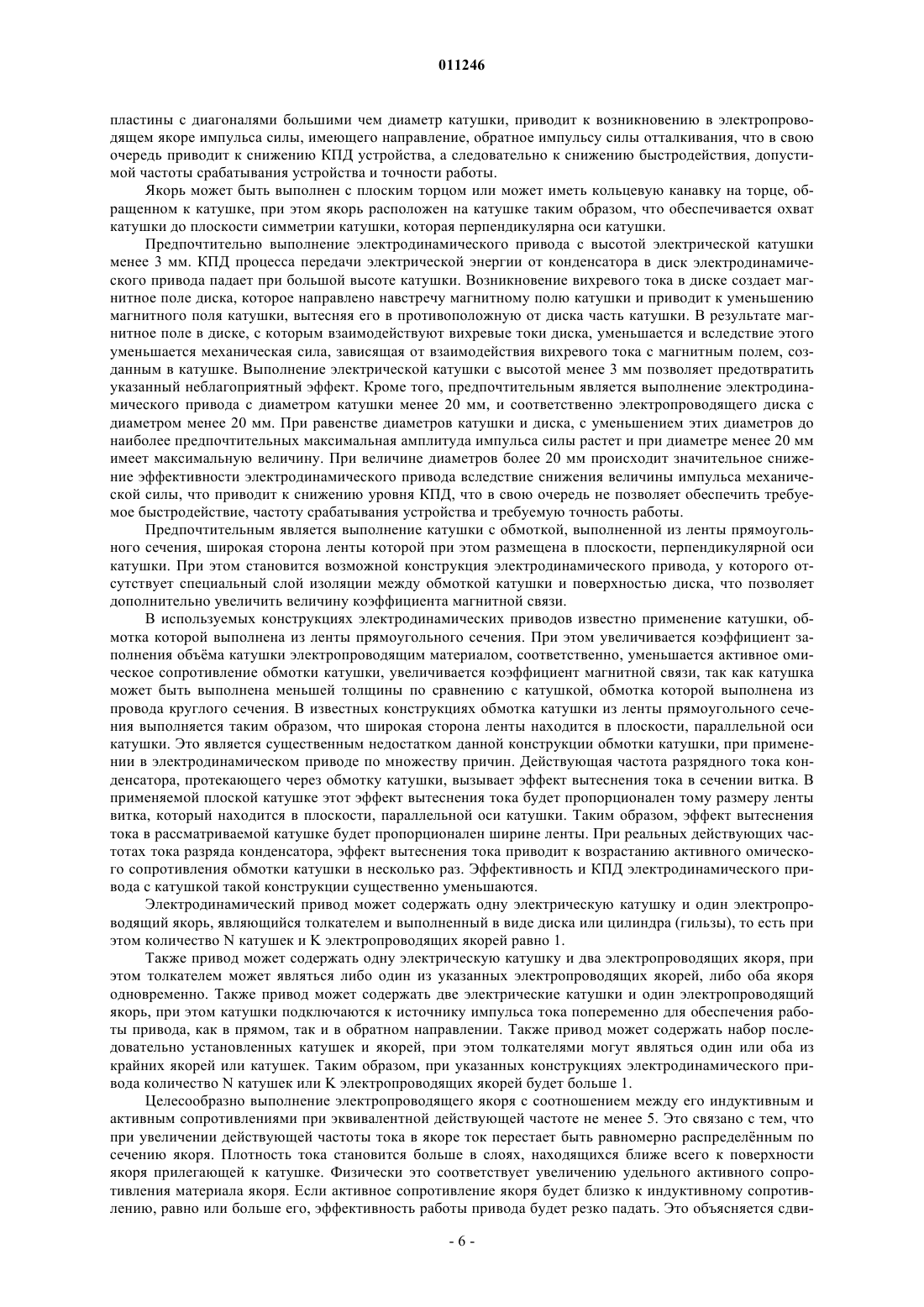
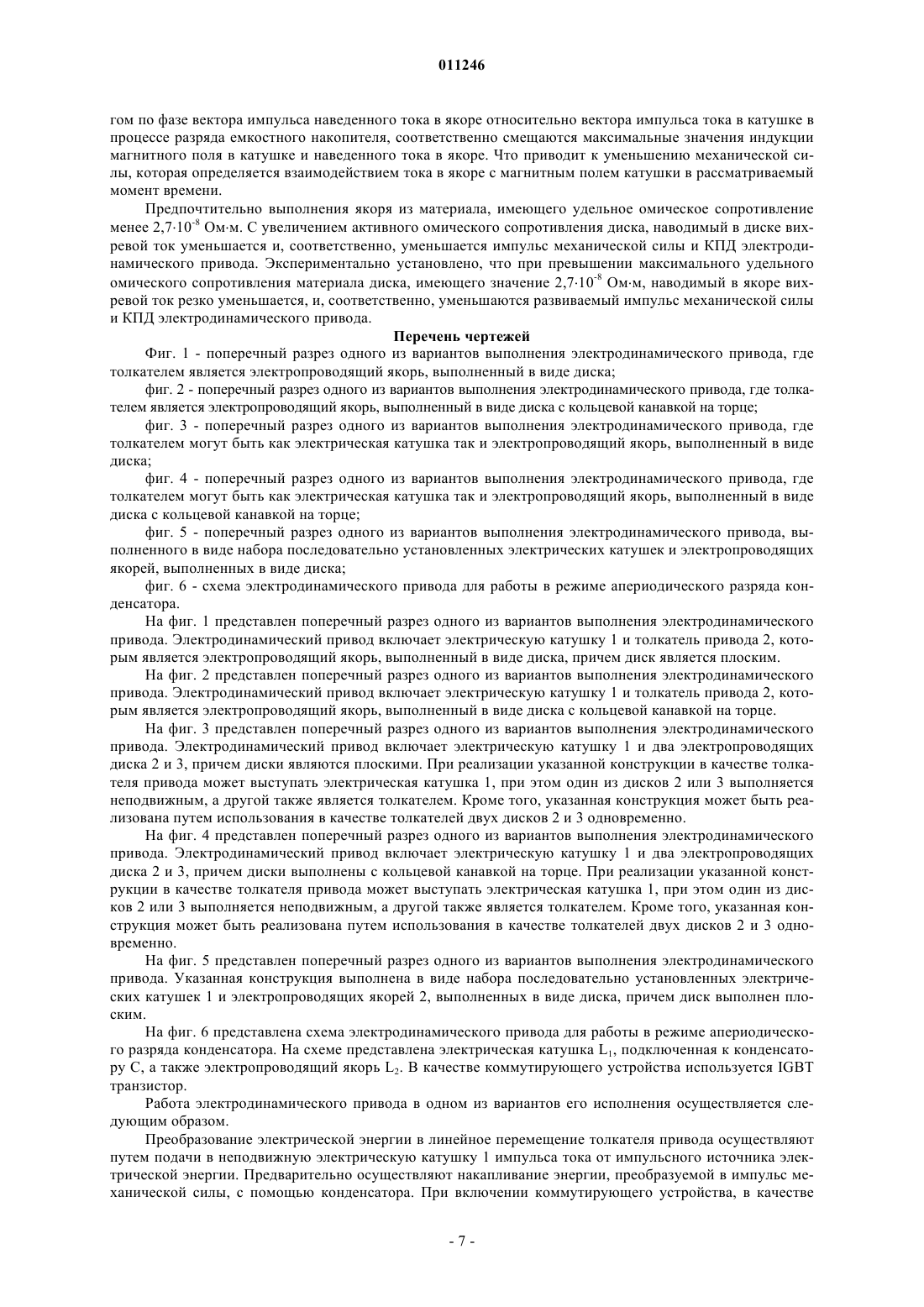
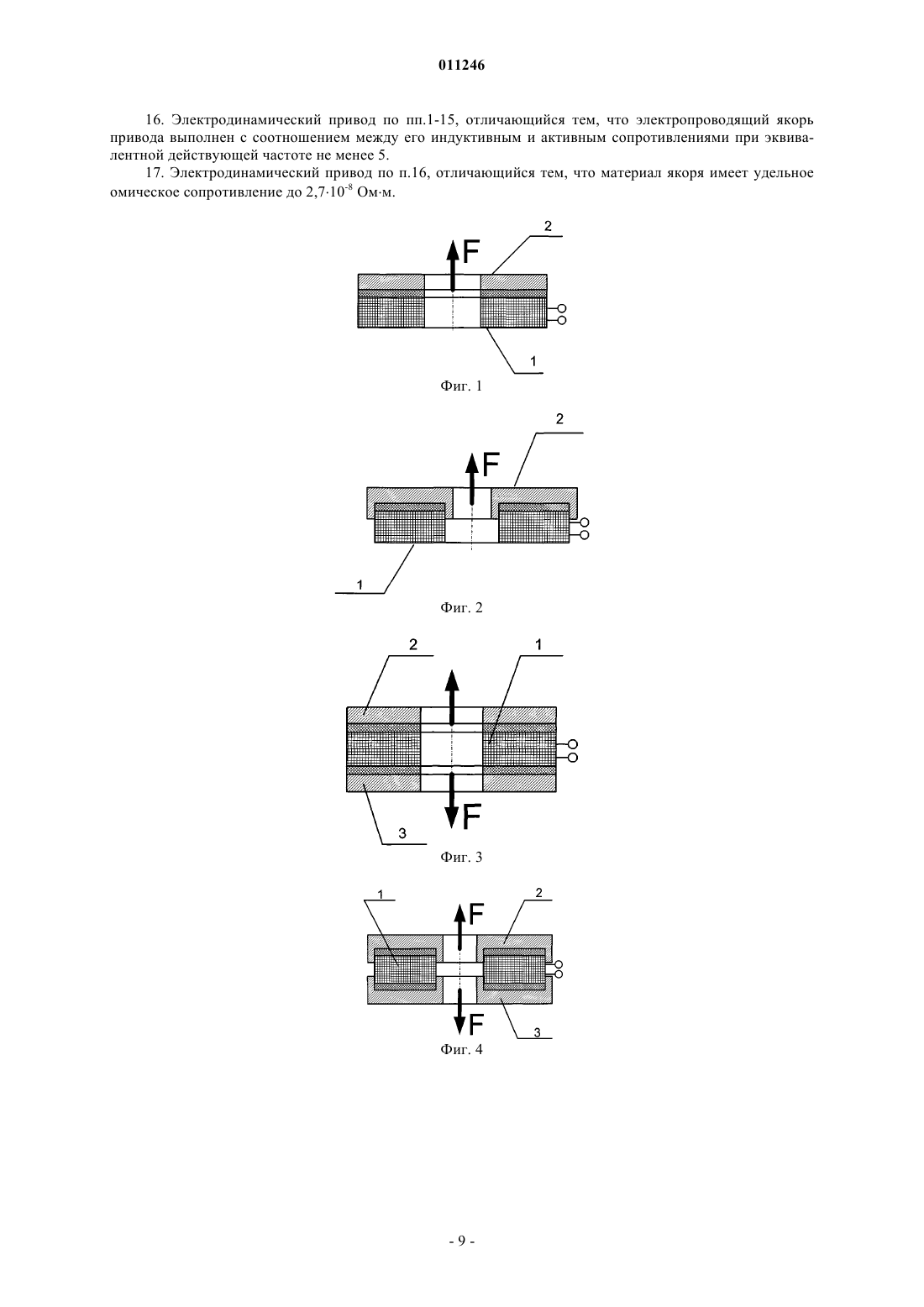
011246 Изобретение относится к области электротехники, в частности к электродинамическим приводам. Существует ряд устройств, для функционирования которых требуются электроуправляемые приводы, обеспечивающие заданные перемещения в течение очень коротких и точно обозначенных промежутков времени. Так, например, в схемах управления переменным током высокой мощности очевидно преимущество открытия и закрытия контактов за время, промежуток которого намного меньше половины длительности цикла переменного тока, что позволяет разорвать или установить контакт в течение одного из коротких промежутков времени, когда мгновенная мощность в схеме относительно низка. В устройствах отбора проб жидкостей или газов в случае изучения быстроизменяющихся процессов требуется произвести отбор образца в точно определенный промежуток времени. В системах дозирования жидкостей или газов скорость и точность работы привода является определяющей для достижения точности дозирования. В качестве электроуправляемых приводов, используемых для обеспечения функционирования указанных типов устройств, применяются пьезоэлектрические приводы, электромагнитные приводы, а также электродинамические приводы различной конструкции. Действие пьезоэлектрического привода основано на пьезоэлектрическом эффекте - взаимной, обратимой связи механических деформаций или напряжений и электрической поляризации в некоторых диэлектрических кристаллах. Принципиальным недостатком пьезоэлектрического привода, ограничивающим его быстродействие, является малое относительное изменение размеров даже при большой величине напряженности электрического поля. Вследствие этого, для перемещения привода, например на 50-100 мкм необходима суммарная высота кристаллов более 100 мм, что приводит к росту массы подвижной части привода. При этом механическая прочность пьезоэлектрических кристаллов при большом количестве циклов нагрузки значительно ниже прочности металлов, это приводит к невозможности получения большего быстродействия при достаточном ресурсе работы такого привода. Принцип действия электромагнитного привода основан на стремлении магнитного поля, создаваемого протекающим через обмотку электромагнита током, к минимальному объему. Вследствие этого подвижный ферромагнитный якорь электромагнита стремится занять такое положение, когда средняя силовая линия магнитного поля в магнитопроводе электромагнита будет иметь минимально возможную для данной конструкции длину. Принципиальными недостатками электромагнитного привода, ограничивающими его быстродействие являются эффект насыщения магнитопровода и большое влияние начального воздушного зазора на величину тяговой силы. Таким образом, для увеличения тяговой силы электромагнита, из-за эффекта насыщения магнитопровода, необходимо пропорционально увеличивать массу подвижной части магнитопровода, т.е. удельная (отнесенная к подвижной массе) величина силы тяги электромагнита ограничена. Следовательно, можно говорить о существовании предела быстродействия устройств с данным приводом, что ограничивает область его применимости. Предметом данного изобретения является электродинамический привод, принцип действия которого основан на использовании эффекта силового взаимодействия электрического тока и магнитного поля. Основными элементами конструкции существующих электродинамических приводов являются импульсный источник тока, включающий конденсатор, коммутатор и блок управления, а также толкатель привода, которым может являться электрическая катушка или электропроводящий якорь, который может быть выполнен в виде диска или цилиндра (гильзы). При пропускании через электрическую катушку импульса тока возникает магнитный поток, который взаимодействует с электропроводным материалом электропроводящего якоря и наводит в нем электродвижущую силу. Под действием электродвижущей силы в якоре возникает вихревой электрический ток. Ток якоря взаимодействует с магнитным полем катушки с током, создавая тем самым импульс механической силы отталкивания якоря от катушки. Обычно применяется способ регулирования привода изменением напряжения зарядки конденсаторов, которые разряжаются на обмотку катушки в колебательном режиме разряда. Однако известные электродинамические приводы обладают целым рядом существенных недостатков, к которым относится относительно низкий КПД, невозможность длительной работы с высокой частотой срабатывания, сложность их конструктивного исполнения, крупные размеры указанных устройств и их дороговизна. Кроме того, указанные приводы функционируют близко к своим предельным возможностям по параметрам быстродействия и частоты срабатывания. В известных электродинамических приводах не учитывается влияние применяемого режима разряда конденсатора на его ресурс и энергоемкость. В настоящее время в существующих электродинамических приводах в основном применяется колебательный режим разряда конденсатора, не обеспечивающий максимальной эффективности привода. При колебательном режиме разряда конденсатора и при коммутации с помощью тиристора, ток, проходящий через катушку, представляет собой одну полуволну разрядного импульса тока конденсатора, так как тиристор отключается при прохождении тока в катушке через ноль. Это энергетически невыгодный режим разряда, так как к моменту отключения импульса тока конденсатор перезаряжается до напряжения с обратным знаком. Данное напряжение меньше исходного по величине, но так как происходит смена знака напряжения, к началу следующего рабочего цикла электродинамического привода необходимо осуществить частичную перезарядку конденсатора. Таким образом, протекающие в зарядном устройстве дополнительные токи понижают КПД электродинамического привода в целом. Кроме того, увеличение размаха напряжения на конденсаторе до величины большей,-1 011246 чем требуемое напряжение заряда конденсатора, снижает ресурс работы конденсатора. Указанные недостатки колебательного режима разряда конденсатора, когда используется одна полуволна импульса тока, широко известны. Однако в практически используемых электродинамических приводах применение колебательного режима разряда конденсатора обусловлено возможностями используемой коммутационной аппаратуры, в качестве которой в настоящее время используются в основном тиристоры. Современная коммутационная аппаратура имеет ограничения по скорости нарастания тока. Превышение этой скорости нарастания разрядного тока в обмотке катушки приводит к необходимости увеличения мощности коммутационного устройства либо к тепловому пробою коммутационного устройства. Кроме того, управление усилием, развиваемым электродинамическим приводом, в основном осуществляется путем управления напряжением заряда конденсатора, что является технологически сложным. Таким образом, можно заключить, что колебательный режим разряда конденсатора целесообразно применять для простейших электродинамических приводов небольшой мощности без регулировки механического усилия, развиваемого электродинамическим приводом. Применение же указанного режима конденсатора для сравнительно мощных электродинамических приводов в устройствах, для функционирования которых требуется обеспечение заданных перемещений в течение очень коротких и точно обозначенных промежутков времени, является нецелесообразным, поскольку не позволяет обеспечить требуемое быстродействие и частоту срабатывания электродинамического привода. В известных конструкциях электродинамических приводов в качестве импульсного источника энергии используются конденсаторы металлобумажного, металлопленочного и других типов, предназначенных для работы в импульсных режимах с полным разрядом запасенной в конденсаторе энергии. Такие конденсаторы имеют принципиальные недостатки. В импульсном режиме разряда при кратковременном по величине импульсе тока, который необходим для эффективной работы электродинамического привода, ресурс работы таких конденсаторов имеет небольшую величину. Так для большинства типов конденсаторов, работающих в импульсном режиме разряда, ресурс не превышает 108 разрядов. Другим недостатком таких конденсаторов является низкая удельная энергоемкость. Так для современных серийных конденсаторов перечисленных выше типов удельная энергоемкость не превышает 50 Дж/дм 3. Указанные недостатки обусловлены также многими другими факторами. В частности экспериментально было установлено, что относительно низкий КПД и действующая сила известных электродинамических приводов обусловлены неоптимальным сочетанием параметров и недостатками конструкции их составных частей. Вследствие этого при заданной величине импульса механической силы в несколько раз увеличивается величина необходимой электрической энергии, накапливаемой в конденсаторе, что снижает КПД привода в целом и увеличивает его сложность. В свою очередь низкий КПД указанных приводов обуславливает необходимость подвода значительной мощности к электрической катушке сравнительно небольшого размера. Большая часть подведенной электрической энергии преобразуется в тепло и нагревает привод. Отвод значительного количества тепла от электродинамического привода является сложной технической проблемой. Например, в системах электродинамической штамповки катушки выполняются из проводника в виде трубки, по которой проходит охлаждающая жидкость. Использование подобного решения для охлаждения электродинамического привода в системах управления технически неосуществимо в силу небольших размеров катушки со сравнительно большим количеством витков провода и соответственно малого сечения провода. Охлаждение только внешней поверхности катушки не позволяет отвести достаточно тепла от внутренних витков вследствие низкой теплопроводности существующих электроизоляционных материалов, которые в реальных обмотках катушки составляют около половины объема. Мощность, а значит быстродействие и частота срабатывания существующих электродинамических приводов ограничены возможностями их охлаждения. Также на уровень КПД электродинамического привода оказывает влияние соотношение между индуктивным и активным сопротивлениями диска при действующей частоте тока. В известных ЭДП не выявлено влияние на эффективность привода соотношений между индуктивным и активным сопротивлениями диска при действующей частоте тока. Если активное сопротивление диска будет близко к индуктивному сопротивлению, равно или больше его, эффективность работы привода будет резко падать. Это объясняется сдвигом по фазе вектора импульса наведенного тока в диске относительно вектора импульса тока в катушке в процессе разряда емкостного накопителя, вследствие чего смещаются максимальные значения индукции магнитного поля в катушке и наведенного тока в диске. Что приводит к уменьшению механической силы, которая определяется взаимодействием тока в диске с магнитным полем катушки в рассматриваемый момент времени. В известных и наиболее распространенных конструкциях электродинамического привода не определено и не учитывается влияние размеров и конструкции обмотки электрической катушки на коэффициент магнитной связи катушки и якоря, а, следовательно, и на эффективность электродинамического привода. Магнитная связь между электрической катушкой и электропроводящим якорем определяется коэффициентом магнитной связи, который является важнейшим конструктивным параметром электрической катушки и якоря. Физически коэффициент магнитной связи показывает, какая часть магнитного потока,создаваемого током, протекающим по обмотке электрической катушки, проникает в якорь и участвует в создании импульса механической силы. Коэффициент магнитной связи Коеф определяется как где М - взаимная индуктивность обмотки электрической катушки и якоря;L1, L2 - индуктивность обмотки электрической катушки и якоря соответственно. Взаимная индуктивность определяется геометрией электрической катушки и якоря, их взаимным расположением, количеством витков в обмотке катушки. Эффективность электродинамического привода крайне чувствительна к величине коэффициента магнитной связи. Чем выше величина коэффициента магнитной связи, тем выше эффективность электродинамического привода при прочих равных условиях. Поэтому при создании электродинамического привода необходимо стремиться к такой конструкции, при которой коэффициент магнитной связи будет максимальным, а, следовательно, и эффективность электродинамического привода будет увеличиваться. Однако существующие конструкции электродинамических приводов не в полной мере отвечают указанному требованию. Также на уровень КПД электродинамического привода оказывает влияние омическое сопротивление электропроводящего якоря. В известных электродинамических приводах не выявлено существование предельного для эффективной работы электродинамического привода активного омического сопротивления якоря. С увеличением активного омического сопротивления якоря наводимый в нем вихревой ток уменьшается и, соответственно, уменьшается импульс механической силы и КПД электродинамического привода. Экспериментально было установлено, что при превышении некоторого максимального удельного омического сопротивления материала наводимый в якоре вихревой ток резко уменьшается, и, соответственно, уменьшаются развиваемый импульс механической силы и КПД электродинамического привода. Кроме того, на уровень КПД значительное влияние оказывают геометрические размеры электрической катушки и электропроводящего якоря, выполненного, например, в виде диска. В известных электродинамических приводах величина импульса силы обычно определяется как величина, пропорциональная диаметру катушки и равного ей по диаметру электропроводящего диска. Однако экспериментально установлено, что существует максимальная величина диаметров конструктивных элементов электродинамического привода, при превышении которой заметно снижается его эффективность. Также на эффективность электродинамического привода оказывает влияние толщина электрической катушки, поскольку КПД процесса передачи электрической энергии от конденсатора в электропроводящий диск электродинамического привода падает при большой толщине катушки. Возникновение вихревого тока в диске создает магнитное поле диска, которое направлено навстречу магнитному полю катушки и в результате уменьшает магнитное поле катушки, вытесняя его в противоположную от диска часть катушки. В результате магнитное поле в диске, с которым взаимодействуют вихревые токи диска, уменьшается и как следствие уменьшается механическая сила, которая зависит от взаимодействия вихревого тока с магнитным полем, созданным в катушке. Существующие же электродинамические приводы зачастую выполнены с неоптимальными размерами его конструктивных элементов. Еще одним фактором, обуславливающим указанные недостатки существующих электродинамических приводов, является то, что в известных электродинамических приводах не учитывается влияние ферромагнитного материала электропроводящего якоря на эффективность электродинамического привода. В основном материал диска в той части, в которую проникает магнитный поток, создаваемый током катушки, является ферромагнитным. В области ферромагнитного материала создается импульс механической силы, обратный по направлению импульсу силы, создаваемому взаимодействием тока якоря с магнитным полем катушки с током, что вызывает уменьшение создаваемого электродинамическим приводом импульса механической силы и его КПД. Известен электродинамический привод, описанный в авторском свидетельстве СССР 684629, в котором электрическая энергия преобразуется в линейное перемещение толкателя привода, включающий электрическую катушку и электропроводящий якорь из неферромагнитного материала по крайней мере в той части якоря, в которую проникает магнитное поле катушки, взаимодействующий с катушкой при подключении катушки к источнику электрической энергии. При этом электродинамический привод выполнен с двумя неподвижными электрическими катушками, а толкателями являются две подвижные катушки. Электропроводящий якорь выполнен в виде одной из указанных подвижных катушек, которая представляет собой поршень, выполненный в виде стакана из неферромагнитного материала. Указанная катушка-поршень размещена между неподвижными катушками, выполнена с направлением витков, противоположным направлению витков первой подвижной катушки и магнитно с ней связана, а с рабочим органом, например с клапаном, связана механической и гидравлической связью, причем каждая из подвижных катушек имеет электрическую связь с неподвижной катушкой, противолежащей другой подвижной катушке. Недостатками описанной конструкции являются ограниченный импульс силы, определяемый величиной подводимых к катушкам токов, величина которых ограничена возможностями современной коммутационной аппаратуры, и низкий КПД, не позволяющие обеспечить требуемый импульс механической силы, большие габариты привода, обусловленные наличием четырех катушек, большая энергоемкость-3 011246 привода, обусловленная низким КПД. Большая электрическая мощность, подводимая к катушкам сравнительно небольшого размера, приводит к тому, что большая часть подведенной электрической энергии преобразуется в тепло и нагревает привод, что значительно снижает период эффективной работы устройства и приводит к преждевременному выходу его из строя. Известен электродинамический привод, описанный в авторском свидетельстве СССР 1335827, в котором электрическая энергия преобразуется в линейное перемещение толкателя привода, включающий электрическую катушку и электропроводящий якорь, взаимодействующий с катушкой при подключении катушки к импульсному источнику энергии, содержащему конденсатор с подключенным к нему коммутирующим устройством с блоком управления. При этом используемое коммутирующее устройство выполнено с возможностью обеспечения работы конденсатора в колебательном режиме разряда, кроме того, в качестве коммутирующего устройства используется тиристор. Недостатками описанной конструкции является использование колебательного режима разряда конденсатора, при котором ток, проходящий через катушку, представляет собой одну полуволну разрядного импульса тока конденсатора. Такой энергетически невыгодный режим разряда конденсатора приводит к возникновению дополнительных токов, протекающих в зарядном устройстве, что приводит к понижению КПД электродинамического привода в целом. Кроме того, используемые в качестве коммутирующего устройства тиристоры имеют ограничения по скорости нарастания тока. Превышение этой скорости нарастания разрядного тока в обмотке катушки приводит к необходимости увеличения мощности коммутационного устройства, что в свою очередь может привести к тепловому пробою коммутационного устройства. Кроме того, к недостаткам описанной конструкции необходимо отнести выполнение электропроводящего якоря из ферромагнитного материала, что обуславливает возможность возникновения импульса механической силы обратного по направлению импульсу силы, создаваемому взаимодействием тока якоря с магнитным полем катушки с током, что вызывает уменьшение создаваемого электродинамическим приводом импульса механической силы и его КПД. Наиболее близким аналогом заявляемого изобретения является электродинамический привод, описанный в патенте РФ 2029129, в котором электрическая энергия преобразуется в линейное перемещение толкателя привода, включающий электрическую катушку и электропроводящий якорь из неферромагнитного материала по крайней мере в той части якоря, в которую проникает магнитное поле катушки,взаимодействующий с катушкой при подключении катушки к импульсному источнику электрической энергии, содержащему конденсатор с подключенным к нему коммутирующим устройством с блоком управления. Используемое в данной конструкции коммутирующее устройство выполнено с возможностью обеспечения работы конденсатора в колебательном режиме разряда и представляет собой тиристор. Недостатками описанной конструкции является колебательный режим разряда конденсатора, при котором ток, проходящий через катушку, представляет собой одну полуволну разрядного импульса тока конденсатора. Данный режим разряда конденсатора является энергетически невыгодным, так как приводит к возникновению дополнительных токов, протекающих в зарядном устройстве, что в свою очередь приводит к понижению КПД электродинамического привода в целом. Кроме того, используемые в качестве коммутирующего устройства тиристоры имеют ограничения по скорости нарастания тока. Превышение скорости нарастания разрядного тока в обмотке катушки приводит к необходимости увеличения мощности коммутационного устройства для предотвращения его теплового пробоя. В основу изобретения поставлена задача создания такого электродинамического привода, который за счет простоты и эффективности конструкции, а также за счет подбора и согласования параметров источника электрической энергии с параметрами конструктивных элементов привода, позволит обеспечить высокий уровень КПД, что в свою очередь позволит создать требуемый импульс механической силы,снизить энергоемкость устройства, а также позволит обеспечить требуемое быстродействие, частоту срабатывания устройства и требуемую точность работы. Поставленная задача решается тем, что электродинамический привод, в котором электрическая энергия преобразуется в линейное перемещение толкателя привода, включающий электрическую катушку и электропроводящий якорь выполненный из неферромагнитного материала по крайней мере в той части якоря, в которую проникает магнитное поле катушки, взаимодействующий с катушкой при подключении катушки к импульсному источнику электрической энергии, содержащему конденсатор с подключенным к нему коммутирующим устройством с блоком управления, при этом включает N электрических катушек, при этом N1, и K электропроводящих якорей, при этом K1 а коммутирующее устройство выполнено с возможностью обеспечения частичного разряда конденсатора в апериодическом режиме разряда. Обеспечение конструкцией электродинамического привода преобразования электрической энергии в линейное перемещение толкателя привода позволяет обеспечить заданные перемещения в течение очень коротких и точно обозначенных промежутков времени. В качестве импульсного источника электрической энергии применяется конденсатор с подключенным к нему коммутирующим устройством с блоком управления. Важнейшим для обеспечения высокого КПД электродинамического привода является режим разряда емкостного накопителя энергии.-4 011246 Предпочтительным является использование апериодического режима разряда конденсатора. При апериодическом режиме разряда конденсатора ток в катушке электродинамического привода нарастает быстрее, чем при колебательном режиме, при равенстве начальных напряжений заряда конденсатора. При больших скоростях изменения тока в катушке увеличивается амплитуда тока в якоре и соответственно растет величина импульса механической силы, что позволяет обеспечить высокий уровень КПД, а также требуемое быстродействие, частоту срабатывания устройства и требуемую точность работы. Целесообразно отключать катушку электродинамического привода от конденсатора до или близко к моменту достижения током катушки максимального значения в области максимальной скорости нарастания тока. К этому моменту напряжение на конденсаторе изменяется незначительно и достигается наибольшая эффективность электродинамического привода. При апериодическом разряде конденсатора на катушку электродинамического привода даже при малой величине индуктивности катушки можно одновременно получить высокую величину КПД и развиваемой электродинамическим приводом силы. Достигается это следующим образом. В зоне нарастания тока через катушку электродинамического привода при малом изменении напряжения на конденсаторе, катушка электродинамического привода последовательно несколько раз отключается и подключается к конденсатору на короткое время. Электродинамический привод при этом вырабатывает несколько импульсов силы с высоким КПД каждого импульса, требуемый же общий импульс силы обеспечивается сложением нескольких последовательных импульсов силы. Такое управление мощностью привода физически реализуется за счет протекающего процесса широтно-импульсной модуляции. В независимости от параметров катушки и якоря электродинамического привода при апериодическом разряде электролитического конденсатора может быть получен более выгодный режим работы электродинамического привода, чем при колебательном режиме разряда конденсатора. Кроме того, при использовании апериодического режима разряда конденсатора становится возможным использование энергоемких электролитических конденсаторов, для которых режим неглубокого разряда соответствует их обычному режиму работы в качестве фильтра в блоках питания. Управление усилием, развиваемым электродинамическим приводом, осуществляется в слаботочной цепи управления временем открытия и закрытия коммутирующего устройства, а не путем управления напряжением заряда конденсатора, что обеспечивает существенные преимущества электродинамического привода указанной конструкции по частоте срабатывания устройства и требуемой точности работы,значительно уменьшает сложность и стоимость коммутирующего устройства. В качестве коммутирующего устройства целесообразно использование транзистора. Наибольшая эффективность электродинамического привода достигается при больших скоростях изменения тока в катушке. Поэтому целесообразно отключать катушку электродинамического привода от конденсатора до или близко к моменту достижения током катушки максимального значения. К этому моменту напряжение на конденсаторе изменяется незначительно. Такая коммутация катушки электродинамического привода и емкостного накопителя дает следующие принципиальные преимущества работы электродинамического привода: многократным подключением-отключением конденсатора в точке максимального энергетического КПД можно обеспечить требуемую величину механического усилия электродинамического привода для достижения максимально возможного КПД при оптимальном сочетании других параметров электродинамического привода. Осуществление коммутации такого типа, обеспечивающей все вышеуказанные преимущества электродинамического привода, обеспечивается именно за счет использования транзисторов. Предпочтительным является использование транзисторов, выполненных по IGBT технологии(IGBT - Insulated Gate Bipolar Transistors). IGBT транзистор представляет собой биполярный транзистор с изолированным затвором - полностью управляемый полупроводниковый прибор, в основе которого трхслойная структура. Его включение и выключение осуществляются подачей и снятием положительного напряжения между затвором и истоком. Кроме того, применение коммутирующего устройства указанного типа позволяет осуществлять позиционирование электродинамического привода путем подачи серии импульсов тока на катушку с током. Толкателем электродинамического привода может выступать как электрическая катушка, так и электропроводящий якорь. Якорь может быть выполнен в форме цилиндра (гильзы) или диска. Такое конструктивное исполнение электродинамического привода позволяет применять его в различных областях техники и в устройствах различного назначения. Целесообразно для изготовления электропроводящего якоря применять неферромагнитный материал по крайней мере в той части якоря, в которую проникает магнитный поток, создаваемый током катушки. Такое исполнение якоря исключает возможность возникновения импульса механической силы,обратного по направлению импульсу силы, создаваемому взаимодействием тока диска с магнитным полем катушки с током, что в свою очередь позволяет обеспечить высокий уровень КПД электропривода, а,следовательно, позволит обеспечить требуемое быстродействие, частоту срабатывания устройства и требуемую точность работы. Предпочтительно выполнение электропроводящего якоря с диаметром, близким к диаметру катушки. Это обусловлено тем, что выполнение электропроводящего якоря, например, в форме прямоугольной-5 011246 пластины с диагоналями большими чем диаметр катушки, приводит к возникновению в электропроводящем якоре импульса силы, имеющего направление, обратное импульсу силы отталкивания, что в свою очередь приводит к снижению КПД устройства, а следовательно к снижению быстродействия, допустимой частоты срабатывания устройства и точности работы. Якорь может быть выполнен с плоским торцом или может иметь кольцевую канавку на торце, обращенном к катушке, при этом якорь расположен на катушке таким образом, что обеспечивается охват катушки до плоскости симметрии катушки, которая перпендикулярна оси катушки. Предпочтительно выполнение электродинамического привода с высотой электрической катушки менее 3 мм. КПД процесса передачи электрической энергии от конденсатора в диск электродинамического привода падает при большой высоте катушки. Возникновение вихревого тока в диске создает магнитное поле диска, которое направлено навстречу магнитному полю катушки и приводит к уменьшению магнитного поля катушки, вытесняя его в противоположную от диска часть катушки. В результате магнитное поле в диске, с которым взаимодействуют вихревые токи диска, уменьшается и вследствие этого уменьшается механическая сила, зависящая от взаимодействия вихревого тока с магнитным полем, созданным в катушке. Выполнение электрической катушки с высотой менее 3 мм позволяет предотвратить указанный неблагоприятный эффект. Кроме того, предпочтительным является выполнение электродинамического привода с диаметром катушки менее 20 мм, и соответственно электропроводящего диска с диаметром менее 20 мм. При равенстве диаметров катушки и диска, с уменьшением этих диаметров до наиболее предпочтительных максимальная амплитуда импульса силы растет и при диаметре менее 20 мм имеет максимальную величину. При величине диаметров более 20 мм происходит значительное снижение эффективности электродинамического привода вследствие снижения величины импульса механической силы, что приводит к снижению уровня КПД, что в свою очередь не позволяет обеспечить требуемое быстродействие, частоту срабатывания устройства и требуемую точность работы. Предпочтительным является выполнение катушки с обмоткой, выполненной из ленты прямоугольного сечения, широкая сторона ленты которой при этом размещена в плоскости, перпендикулярной оси катушки. При этом становится возможной конструкция электродинамического привода, у которого отсутствует специальный слой изоляции между обмоткой катушки и поверхностью диска, что позволяет дополнительно увеличить величину коэффициента магнитной связи. В используемых конструкциях электродинамических приводов известно применение катушки, обмотка которой выполнена из ленты прямоугольного сечения. При этом увеличивается коэффициент заполнения объма катушки электропроводящим материалом, соответственно, уменьшается активное омическое сопротивление обмотки катушки, увеличивается коэффициент магнитной связи, так как катушка может быть выполнена меньшей толщины по сравнению с катушкой, обмотка которой выполнена из провода круглого сечения. В известных конструкциях обмотка катушки из ленты прямоугольного сечения выполняется таким образом, что широкая сторона ленты находится в плоскости, параллельной оси катушки. Это является существенным недостатком данной конструкции обмотки катушки, при применении в электродинамическом приводе по множеству причин. Действующая частота разрядного тока конденсатора, протекающего через обмотку катушки, вызывает эффект вытеснения тока в сечении витка. В применяемой плоской катушке этот эффект вытеснения тока будет пропорционален тому размеру ленты витка, который находится в плоскости, параллельной оси катушки. Таким образом, эффект вытеснения тока в рассматриваемой катушке будет пропорционален ширине ленты. При реальных действующих частотах тока разряда конденсатора, эффект вытеснения тока приводит к возрастанию активного омического сопротивления обмотки катушки в несколько раз. Эффективность и КПД электродинамического привода с катушкой такой конструкции существенно уменьшаются. Электродинамический привод может содержать одну электрическую катушку и один электропроводящий якорь, являющийся толкателем и выполненный в виде диска или цилиндра (гильзы), то есть при этом количество N катушек и K электропроводящих якорей равно 1. Также привод может содержать одну электрическую катушку и два электропроводящих якоря, при этом толкателем может являться либо один из указанных электропроводящих якорей, либо оба якоря одновременно. Также привод может содержать две электрические катушки и один электропроводящий якорь, при этом катушки подключаются к источнику импульса тока попеременно для обеспечения работы привода, как в прямом, так и в обратном направлении. Также привод может содержать набор последовательно установленных катушек и якорей, при этом толкателями могут являться один или оба из крайних якорей или катушек. Таким образом, при указанных конструкциях электродинамического привода количество N катушек или K электропроводящих якорей будет больше 1. Целесообразно выполнение электропроводящего якоря с соотношением между его индуктивным и активным сопротивлениями при эквивалентной действующей частоте не менее 5. Это связано с тем, что при увеличении действующей частоты тока в якоре ток перестает быть равномерно распределнным по сечению якоря. Плотность тока становится больше в слоях, находящихся ближе всего к поверхности якоря прилегающей к катушке. Физически это соответствует увеличению удельного активного сопротивления материала якоря. Если активное сопротивление якоря будет близко к индуктивному сопротивлению, равно или больше его, эффективность работы привода будет резко падать. Это объясняется сдви-6 011246 гом по фазе вектора импульса наведенного тока в якоре относительно вектора импульса тока в катушке в процессе разряда емкостного накопителя, соответственно смещаются максимальные значения индукции магнитного поля в катушке и наведенного тока в якоре. Что приводит к уменьшению механической силы, которая определяется взаимодействием тока в якоре с магнитным полем катушки в рассматриваемый момент времени. Предпочтительно выполнения якоря из материала, имеющего удельное омическое сопротивление менее 2,710-8 Омм. С увеличением активного омического сопротивления диска, наводимый в диске вихревой ток уменьшается и, соответственно, уменьшается импульс механической силы и КПД электродинамического привода. Экспериментально установлено, что при превышении максимального удельного омического сопротивления материала диска, имеющего значение 2,710-8 Омм, наводимый в якоре вихревой ток резко уменьшается, и, соответственно, уменьшаются развиваемый импульс механической силы и КПД электродинамического привода. Перечень чертежей Фиг. 1 - поперечный разрез одного из вариантов выполнения электродинамического привода, где толкателем является электропроводящий якорь, выполненный в виде диска; фиг. 2 - поперечный разрез одного из вариантов выполнения электродинамического привода, где толкателем является электропроводящий якорь, выполненный в виде диска с кольцевой канавкой на торце; фиг. 3 - поперечный разрез одного из вариантов выполнения электродинамического привода, где толкателем могут быть как электрическая катушка так и электропроводящий якорь, выполненный в виде диска; фиг. 4 - поперечный разрез одного из вариантов выполнения электродинамического привода, где толкателем могут быть как электрическая катушка так и электропроводящий якорь, выполненный в виде диска с кольцевой канавкой на торце; фиг. 5 - поперечный разрез одного из вариантов выполнения электродинамического привода, выполненного в виде набора последовательно установленных электрических катушек и электропроводящих якорей, выполненных в виде диска; фиг. 6 - схема электродинамического привода для работы в режиме апериодического разряда конденсатора. На фиг. 1 представлен поперечный разрез одного из вариантов выполнения электродинамического привода. Электродинамический привод включает электрическую катушку 1 и толкатель привода 2, которым является электропроводящий якорь, выполненный в виде диска, причем диск является плоским. На фиг. 2 представлен поперечный разрез одного из вариантов выполнения электродинамического привода. Электродинамический привод включает электрическую катушку 1 и толкатель привода 2, которым является электропроводящий якорь, выполненный в виде диска с кольцевой канавкой на торце. На фиг. 3 представлен поперечный разрез одного из вариантов выполнения электродинамического привода. Электродинамический привод включает электрическую катушку 1 и два электропроводящих диска 2 и 3, причем диски являются плоскими. При реализации указанной конструкции в качестве толкателя привода может выступать электрическая катушка 1, при этом один из дисков 2 или 3 выполняется неподвижным, а другой также является толкателем. Кроме того, указанная конструкция может быть реализована путем использования в качестве толкателей двух дисков 2 и 3 одновременно. На фиг. 4 представлен поперечный разрез одного из вариантов выполнения электродинамического привода. Электродинамический привод включает электрическую катушку 1 и два электропроводящих диска 2 и 3, причем диски выполнены с кольцевой канавкой на торце. При реализации указанной конструкции в качестве толкателя привода может выступать электрическая катушка 1, при этом один из дисков 2 или 3 выполняется неподвижным, а другой также является толкателем. Кроме того, указанная конструкция может быть реализована путем использования в качестве толкателей двух дисков 2 и 3 одновременно. На фиг. 5 представлен поперечный разрез одного из вариантов выполнения электродинамического привода. Указанная конструкция выполнена в виде набора последовательно установленных электрических катушек 1 и электропроводящих якорей 2, выполненных в виде диска, причем диск выполнен плоским. На фиг. 6 представлена схема электродинамического привода для работы в режиме апериодического разряда конденсатора. На схеме представлена электрическая катушка L1, подключенная к конденсатору С, а также электропроводящий якорь L2. В качестве коммутирующего устройства используется IGBT транзистор. Работа электродинамического привода в одном из вариантов его исполнения осуществляется следующим образом. Преобразование электрической энергии в линейное перемещение толкателя привода осуществляют путем подачи в неподвижную электрическую катушку 1 импульса тока от импульсного источника электрической энергии. Предварительно осуществляют накапливание энергии, преобразуемой в импульс механической силы, с помощью конденсатора. При включении коммутирующего устройства, в качестве-7 011246 которого использован транзистор, конденсатор частично разряжают на электрическую катушку 1. Таким образом, осуществляют переход части запасенной в конденсаторе электрической энергии в электромагнитную энергию обмотки электрической катушки 1. Часть запасенной энергии тратится на нагрев проводников катушки 1, а также теряется на тепловые потери от создаваемых вихревых токов в корпусных деталях и т.п. Оставшаяся часть электромагнитной энергии создает электромагнитное поле вокруг обмотки электродинамического привода и тем самым осуществляют частичную передачу индуктивным путем электромагнитной энергии в толкатель электродинамического привода, которым в данном варианте осуществления изобретения является электропроводящий якорь, который выполняют в виде диска. Проникающий в электропроводящий диск, который выполняют из неферромагнитного материала в той его части, в которую проникает магнитное поле катушки, переменный электромагнитный поток наводит в указанном диске вихревой ток, который, взаимодействуя с магнитным потоком, проникшим в диск,создает импульс механической силы. При этом выполняется отталкивание электропроводящего диска от катушки, за счет чего осуществляют необходимое воздействие на перемещаемый объект. Таким образом, заявляемое изобретение, представляющее собой электродинамический привод, который за счет простоты и эффективности конструкции, а также за счет подбора и согласования параметров источника электрической энергии с параметрами конструктивных элементов привода, обеспечит высокий уровень КПД, что в свою очередь позволит создать требуемый импульс механической силы, снизить энергоемкость устройства, а также позволит обеспечить требуемое быстродействие, частоту срабатывания устройства и требуемую точность работы. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Электродинамический привод, в котором электрическая энергия преобразуется в линейное перемещение толкателя привода, включающий электрическую катушку и электропроводящий якорь, выполненный из неферромагнитного материала, по крайней мере, в той части якоря, в которую проникает магнитное поле катушки, взаимодействующий с катушкой при подключении катушки к импульсному источнику электрической энергии, содержащему конденсатор с подключенным к нему коммутирующим устройством с блоком управления, отличающийся тем, что включает N электрических катушек, при этомN1, и K электропроводящих якорей, при этом K1, а коммутирующее устройство выполнено с возможностью обеспечения частичного разряда конденсатора в апериодическом режиме разряда. 2. Электродинамический привод по п.1, отличающийся тем, что коммутирующее устройство выполнено с возможностью обеспечения управления мощностью привода многократным подключениемотключением конденсатора. 3. Электродинамический привод по п.1 или 2, отличающийся тем, что коммутирующее устройство выполнено с возможностью обеспечения позиционирования привода путем подачи серии импульсов тока. 4. Электродинамический привод по пп.1-3, отличающийся тем, что коммутирующее устройство представляет собой транзистор с изолированной базой. 5. Электродинамический привод по пп.1-4, отличающийся тем, что конденсатор представляет собой электролитический конденсатор. 6. Электродинамический привод по пп.1-5, отличающийся тем, что толкателем является электрическая катушка. 7. Электродинамический привод по пп.1-5, отличающийся тем, что толкателем является электропроводящий якорь. 8. Электродинамический привод по пп.1-7, отличающийся тем, что электропроводящий якорь выполнен в виде гильзы. 9. Электродинамический привод по пп.1-7, отличающийся тем, что электропроводящий якорь выполнен в виде диска. 10. Электродинамический привод по п.9, отличающийся тем, что диск выполнен с кольцевой канавкой на торце диска, при этом диск расположен на катушке с обеспечением охвата катушки практически до плоскости симметрии катушки. 11. Электродинамический привод по пп.1-10, отличающийся тем, что катушка имеет обмотку, выполненную из ленты прямоугольного сечения, при этом широкая сторона ленты размещена в плоскости,перпендикулярной оси катушки. 12. Электродинамический привод по пп.1-11, отличающийся тем, что электрическая катушка имеет высоту менее 3 мм. 13. Электродинамический привод по пп.1-12, отличающийся тем, что привод содержит N электрических катушек (N=1) и K электропроводящих якорей (K=1). 14. Электродинамический привод по пп.1-12, отличающийся тем, что содержит N электрических катушек и K+1 электропроводящих якорей. 15. Электродинамический привод по пп.1-12, отличающийся тем, что содержит N+1 электрических катушек и K электропроводящих якорей.-8 011246 16. Электродинамический привод по пп.1-15, отличающийся тем, что электропроводящий якорь привода выполнен с соотношением между его индуктивным и активным сопротивлениями при эквивалентной действующей частоте не менее 5. 17. Электродинамический привод по п.16, отличающийся тем, что материал якоря имеет удельное омическое сопротивление до 2,710-8 Омм.
МПК / Метки
МПК: H01F 7/06, F02M 51/06
Метки: электродинамический, привод
Код ссылки
<a href="https://eas.patents.su/11-11246-elektrodinamicheskijj-privod.html" rel="bookmark" title="База патентов Евразийского Союза">Электродинамический привод</a>
Электродинамический возбудитель
Номер патента: 1014
Опубликовано: 28.08.2000
Авторы: Джарвис Эдвард, Робертс Мартин, Азима Генри
МПК: H04R 9/06
Метки: возбудитель, электродинамический
Формула / Реферат:
1. Электродинамический инерционный возбудитель (1) колебаний для возбуждения элемента (2), имеющего способность переносить и распространять входную колебательную энергию, содержащий узел (3, 4) двигательной катушки, имеющий катушку (3), жестко прикрепленную к трубчатому элементу (4) каркаса катушки, узел (5, 6, 7) магнита, расположенный концентрически относительно узла двигательной катушки, средство (11), подвешивающее узел магнита для осевого...
Электромагнитный привод вакуумного выключателя
Номер патента: 2372
Опубликовано: 25.04.2002
Авторы: Бодаква Роман Михайлович, Мельник Ярослав Владимирович, Мельник Роман Иванович, Пшоновский Дмитрий Леопольдович
МПК: H01H 33/38, H01H 33/66
Метки: вакуумного, выключателя, привод, электромагнитный
Формула / Реферат:
1. Электромагнитный привод вакуумного выключателя, содержащий пластинчатый магнитопровод с якорем, установленным в нем на штоках с возможностью осевого перемещения и фиксации в двух фиксированных крайних положениях, постоянные магниты, установленные в средней части магнитопровода по обеим сторонам от якоря относительно оси последнего, катушки включения и отключения, соосно установленные в магнитопроводе по обеим сторонам от постоянных магнитов...
Электромеханический привод транспортного средства
Номер патента: 8000
Опубликовано: 27.02.2007
Авторы: Пабат Анастасия Анатольевна, Пабат Александр Анатольевич
МПК: B60W 10/08, B60W 10/02, B60L 11/00...
Метки: средства, привод, транспортного, электромеханический
Формула / Реферат:
Электромеханический привод транспортного средства, содержащий электрический двигатель, соединенный с механизмом движения посредством редуктора, имеющего быстроходный вал, сопряженный с валом двигателя, маховик и муфту, отличающийся тем, что редуктор выполнен реверсивным, маховик соединен с ротором двигателя, муфта установлена на быстроходном валу редуктора и выполнена управляемой, а сопряжение быстроходного вала редуктора с валом двигателя...
Ручной привод (варианты)
Номер патента: 7821
Опубликовано: 27.02.2007
Автор: Саргсян Арман Гамлетович
МПК: B25B 23/142, B25B 17/02, B25G 1/04...
Метки: ручной, привод, варианты
Формула / Реферат:
1. Ручной привод, характеризующийся тем, что он содержит опорный элемент, жестко связанный с ведомым валом в плоскости, перпендикулярной оси ведомого вала, шток-рукоятку, размещенную в направляющей с возможностью перемещения рукоятки в положение, обеспечивающее изменение плеча приложения крутящей силы, и средство зацепления шток-рукоятки с опорным элементом, причем в силовой цепи передачи крутящего момента от шток-рукоятки к ведомому валу...
Электромеханический регулируемый привод выгребной цепи щебнеочистительной машины

Номер патента: 5431
Опубликовано: 24.02.2005
Авторы: Самысько Василий Александрович, Начинкин Виктор Павлович, Чвоков Владимир Дмитриевич, Никончук Михаил Олегович, Жук Ольга Майевна, Волков Алексей Сергеевич, Логинов Михаил Аркадьевич
МПК: F16H 37/06, E01B 27/04
Метки: привод, электромеханический, машины, щебнеочистительной, выгребной, цепи, регулируемый
Формула / Реферат:
1. Электромеханический регулируемый привод выгребной цепи щебнеочистительной машины, включающий приводные двигатели, редуктор, передающие механизмы, пусковую и блокировочную аппаратуру, контрольно-измерительную или автоматизированную систему управления исполнительными органами, отличающийся тем, что электромеханический привод снабжен частотнорегулируемым асинхронным электродвигателем, работающим совместно с нерегулируемыми приводными...
Предыдущий патент: Амиды карбоновых кислот в качестве ингибиторов фактора ха
Следующий патент: Подложка, покрытая слоем диэлектрика, и способ и устройство для её изготовления
Случайный патент: Производные амида гетероарил-гексановой кислоты, их получение и их применение в качестве селективных ингибиторов связывания mip-1-альфа с его рецептором ccr1