Электромеханический привод транспортного средства
Номер патента: 8000
Опубликовано: 27.02.2007
Авторы: Пабат Анастасия Анатольевна, Пабат Александр Анатольевич
Формула / Реферат
Электромеханический привод транспортного средства, содержащий электрический двигатель, соединенный с механизмом движения посредством редуктора, имеющего быстроходный вал, сопряженный с валом двигателя, маховик и муфту, отличающийся тем, что редуктор выполнен реверсивным, маховик соединен с ротором двигателя, муфта установлена на быстроходном валу редуктора и выполнена управляемой, а сопряжение быстроходного вала редуктора с валом двигателя выполнено посредством бесступенчатой управляемой трансмиссии, сервопривод управления которой соединен с выходом системы управления, вход которой соединен с системой ABS транспортного средства, органами управления тормозом и акселератором, сенсор которого посредством системы управления соединен с сервоприводом управляемой муфты.

Текст
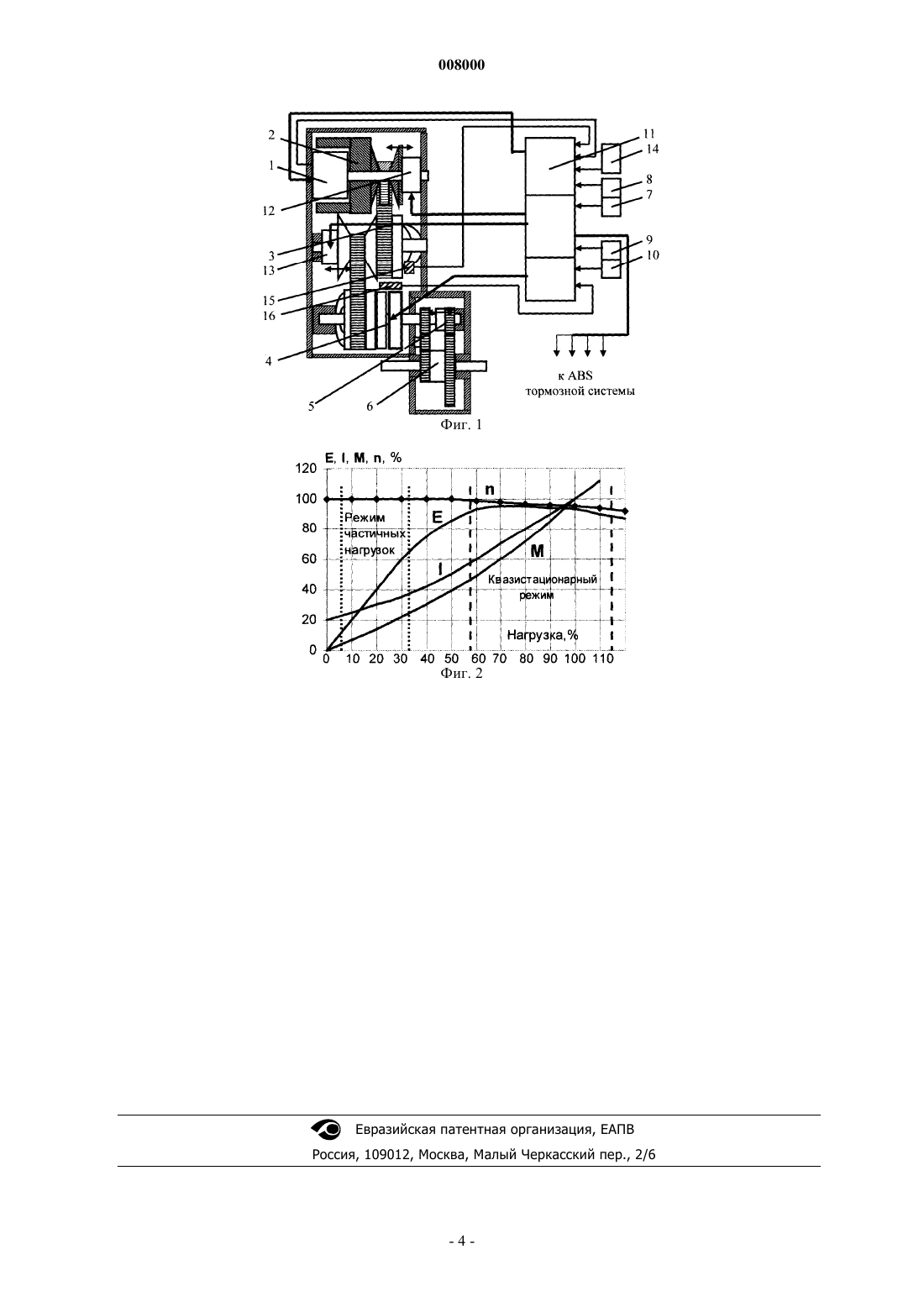
008000 Изобретение относится к электрическим тяговым системам транспортных средств с питанием от автономных источников электроснабжения и может быть использовано в складских, транспортных, космических роботах, и прежде всего электромобилях. Известен электропривод автономного транспортного средства, содержащий источник напряжения постоянного тока, параллельно которому включены тяговые двигатели последовательного возбуждения,однофазные диодные мосты, точки соединения разноименных электродов диодов каждого из которых соединены соответственно с одними из выводов источника напряжения и обмотки возбуждения соответствующего тягового двигателя, другой вывод которой подключен к другому выводу источника напряжения, тормозные резисторы и контакторы, в котором между точками соединения одноименных электродов диодов каждого моста включена цепь из последовательно соединенных обмотки якоря соответствующего тягового двигателя и тормозного резистора, зашунтированного контактором (а.с.1207836, СССР,B 60L 15/04, 1986, б.и.4). Недостатком электропривода являются значительные потери энергии в системе управления двигателем вследствие использования тормозных резисторов при движении в стационарном режиме частичных нагрузок. Известно устройство для рекуперативного торможения транспортного средства, содержащее подключенную через быстродействующий выключатель к источнику питания цепь из последовательно соединенных обмоток якорей тяговых машин, дросселя и шунтированных резистором возбудителя и обмоток возбуждения тяговых машин, шунтирующий тиристор, катод которого соединен с точкой соединения дросселя и возбудителя, а управляющий электрод - с выходом порогового элемента, и ключевой элемент,шунтирующий резистор, при этом устройство снабжено включенным между анодом шунтирующего тиристора и одним из выводов источника питания коммутирующим конденсатором, диодом, подключенным анодом к точке соединения возбудителя и обмоток возбуждения тяговых машин, а катодом - к точке соединения шунтирующего тиристора и коммутирующего конденсатора, и делителем напряжения, крайние выводы которого подключены к точке соединения быстродействующего выключателя и обмоток якорей тяговых машин и одним из выводов источника питания, а средний вывод - к точке соединения коммутирующего конденсатора и шунтирующего тиристора, причем ключевой элемент выполнен в виде тиристора, в цепь которого включен пороговый элемент (а.с.1276537, СССР, B 60L 7/22. 1986, б.и.46). Недостатком устройства рекуперации является определяемая функциональной схемой необходимость аккумулирования кинетической энергии транспортного средства при рекуперативном тсрможении непосредственно в процессе зарядки источника питания, эффективность которой вследствие специфики энергоотдачи и кинетики химических процессов на электродах электрохимической системы не превышает 20%. Известен электропривод электромобиля, содержащий тяговые электродвигатели, электрический генератор переменного тока, вращаемый первичным двигателем, группу электрических батарей, соединенную с тяговыми электродвигателями и электрическим генератором, преобразователь, выполненный на управляемых электрических вентилях, на стороне переменного тока соединенный с электрическим генератором, и другой преобразователь, на стороне переменного тока соединенный с электрическим генератором и на стороне постоянного тока - с группой электрических батарей, в котором для обеспечения работы в широком диапазоне скоростей без снижения КПД, первый из указанных преобразователей соединен на стороне с тяговыми электродвигателями и группой электрических батарей последовательно (а.с.516337, СССР, B 60L 11/12, 1976, б.и.20). Недостатком электропривода электромобиля является наличие по меньшей мере двух весьма сложных и дорогостоящих преобразователей-инверторов и генератора переменного тока для повышения КПД привода в режиме частичных нагрузок. Изестна электромеханическая трансмиссия транспортного средства, содержащая двигатели, соединенные посредством трехзвенных дифференциальных планетарных механизмов с колесными передачами, в которой для повышения плавности изменения скорости движения транспортного средства одновременные свободные звенья дифференциалов соединены между собой жесткой передачей, при этом передаточные числа колесных передач одного борта отличны от передаточных чисел колесных передач противоположного борта, а передаточное число передачи, связывающей одноименные звенья дифференциалов, отлично от единицы (а.с.527315, СССР, B 60L 11/08, В 60 К 7/00, 1977, б.и.33). Недостатком электромеханической трансмиссии является определяемое конструктивной схемой неизменное передаточное отношение механизмов передачи вращения, исключающее возможность увеличения КПД привода в режиме частичных нагрузок. Известен привод транспортного средства, содержащий электрический двигатель, соединенный с механизмом движения посредством редуктора, имеющего быстроходный вал, сопряженный с валом двигателя, маховик и муфту, при этом маховик установлен на быстроходном валу редуктора с возможностью вращения, а муфта выполнена фрикционной включаемой, одна из частей которой установлена на быстроходном валу редуктора и подпружинена к тормозному диску, расположенному на торцовой части маховика, а другая часть муфты связана с маховиком (а.с.1548824, Н 02 К 7/02, 1990, б.и.9). Недостатком привода является нерациональное расходование энергии автономных источников пи-1 008000 тания вследствие работы электрического двигателя в режиме частичных нагрузок при изменении скорости движения, ограниченные динамические характеристики и невозможность рекуперации кинетической энергии в процессе торможения транспортного средства. В основу изобретения поставлена задача усовершенствования привода транспортного средства, в котором редуктор выполнен реверсивным, маховик соединен с ротором двигателя, муфта установлена на быстроходном валу редуктора и выполнена управляемой, а сопряжение быстроходного вала редуктора с валом двигателя выполнено посредством бесступенчатой управляемой трансмиссии, сервопривод управления которой соединен с выходом системы управления, вход которой соединен с системой ABS транспортного средства, органами управления тормозом и акселератором, сенсор которого посредством системы управления соединен с сервоприводом управляемой муфты, что позволяет устанавливать скорость транспортного средства независимо от режима работы электрического двигателя и производить рекуперацию кинетической энергии при торможении транспортного средства посредством образованного ротором двигателя и маховиком реверсивного гироаккумулятора с последующим использованием этой энергии при разгоне транспортного средства, что увеличивает динамические характеристики и обеспечивает рациональное расходование энергии автономных источников питания вследствие работы электрического двигателя только в режиме максимальной эффективности независимо от режима движения транспортного средства. Поставленная задача достигается тем, что электромеханический привод транспортного средства,содержащий электрический двигатель, соединенный с механизмом движения посредством редуктора,имеющего быстроходный вал, сопряженный с валом двигателя, маховик и муфту, в котором редуктор выполнен реверсивным, маховик соединен с ротором двигателя, муфта установлена на быстроходном валу редуктора и выполнена управляемой, а сопряжение быстроходного вала редуктора с валом двигателя выполнено посредством бесступенчатой управляемой трансмиссии, сервопривод управления которой соединен с выходом системы управления, вход которой соединен с системой ABS транспортного средства, органами управления тормозом и акселератором, сенсор которого посредством системы управления соединен с сервоприводом управляемой муфты. Применение реверсивного редуктора обеспечивает изменение направления движения транспортного средства без остановки электрического двигателя и потери кинетической энергии вращения реверсивного гироаккумулятора. Применение соединенного с ротором двигателя маховика увеличивает момент инерции гироаккумулятора, что обеспечивает при рабочих оборотах двигателя аккумулирование энергии, сравнимой с кинетической энергией транспортного средства на крейсерской скорости. Применение установленной на быстроходном валу редуктора управляемой муфты обеспечивает сохранение кинетической энергии гироаккумулятора при остановке транспортного средства и изменении режимов движения. Применение бесступенчатой управляемой трансмиссии обеспечивает изменение режимов движения транспортного средства при стационарном режиме электрического двигателя и возможность рекуперации кинетической энергии при торможении с последующим использованием этой энергии при разгоне. Применение системы управления обеспечивает функциональное соответствие управляющих воздействий и адекватных режимов элементов привода. Функциональная схема электромеханического привода транспортного средства представлена на фиг. 1, характеристика эффективности (коэффициента полезного действия) Е, частоты вращения n, рабочего тока I и вращающего момента М электрического двигателя в зависимости от нагрузки - на фиг. 2. Электромеханический привод содержит приводной двигатель 1, ротор которого соединен с маховиком 2 и управляемой бесступенчатой трансмиссией 3, соединенной посредством управляемой муфты 4 с реверсивным редуктором 5 и механизмом движения (колесным дифференциалом) 6. Орган управления тормозом 7 и сенсор тормоза 8, акселератор 9 и сенсор акселератора 10 соединены со входом системы управления 11, выход которой соединен с двигателем 1, сервоприводами 12, 13 управляемой бесступенчатой трансмиссии 3 и сервоприводом управляемой муфты 4. Вход системы управления 11 соединен также с селектором 14 режимов двигателя, датчиком 15 управляемой трансмиссии, датчиком 16 управляемой муфты и датчиками стандартной системы ABS, которой оборудовано транспортное средство. Работает электромеханический привод транспортного средства следующим образом. Стационарный режим привода устанавливается водителем посредством селектора 14 режимов двигателя, происходит прямое включение двигателя 1 и достижение им стационарного состояния за 2-5 с в зависимости от мощности приводного двигателя. При воздействии на сенсор акселератора 10 система управления 11 включает управляемую муфту 4 и транспортное средство начинает двигаться в зависимости от состояния реверсивного редуктора 5, например, вперед. При дальнейшем воздействии на акселератор 9 сервоприводы 12 и 13 синхронно уменьшают передаточное отношение бесступенчатой трансмиссии 3 и скорость движения транспортного средства увеличивается. В случае прекращения воздействия на сенсор акселератора 10 управляемая муфта 4 выключается и транспортное средство движется накатом. Датчик 16 управляемой муфты контролирует частоту вращения обеих частей муфты и система управления 11 посредством сервоприводов 12 и 13 изменяет передаточное отношение бесступенчатой-2 008000 трансмиссии 3 таким образом, чтобы частота вращения обеих частей муфты 4 сохранялась неизменной независимо от скорости движения транспортного средства. При наличии управляющего воздействия на акселератор 9 и одновременном воздействии на сенсор тормоза 8 система управления 11 отключает приводной двигатель, посредством сервоприводов 12 и 13 контролировано увеличивает передаточное отношения бесступенчатой трансмиссии 3, скорость вращения ротора двигателя и маховика 2 возрастает, что приводит к аккумулированию кинетической энергии при рекуперативном торможении и последующем использовании ее при разгоне транспортного средства. Поскольку частота вращения двигателя выше частоты n стационарного режима (график n, фиг. 2), происходит инверсия приводного двигателя в электрический генератор и зарядка автономных источников питания. В случае превышения частоты вращения двигателя 1 критического значения, система управления 11 автоматически включает режим динамического торможения, который может быть включен также водителем посредством селектора 14. В процессе движения и рекуперативного торможения система управления 11 анализирует сигналы датчиковABS, которой оборудовано транспортное средство, и автоматически изменяет передаточное отношение управляемой трансмиссии 3 во избежание пробуксовки или блокировки ведущих колес. При уменьшении частоты вращения ротора двигателя и маховика 2 до уровня n, система управления 11 автоматически включает стационарный режим двигателя 1. При воздействии на орган управления тормозом 7 приводной двигатель 1 и управляемая муфта 4 отключаются и управление торможением передается штатной тормозной системе, которой оборудовано транспортное средство. Квазистационарный режим привода, обеспечивающий работу приводного двигателя только в режиме номинальной эффективности независимо от режима движения транспортного средства, также включается водителем посредством селектора 14. При этом система управления 11 контролирует величину тока приводного двигателя и отключает его при достижении уровня 50-70%, исключая тем самым уменьшение эффективности двигателя при недогрузке (график I, фиг. 2). Все режимы движения транспортного средства обеспечиваются аналогично состоянию стационарного режима привода. При уменьшении частоты вращения ротора двигателя и маховика 2, система управления 11 посредством датчика 15 управляемой трансмиссии 3 контролирует частоту вращения промежуточного звена трансмиссии и поддерживает ее неизменной уменьшением передаточного отношения за счет управляющего воздействия сервопривода 12. В случае полной реализации передаточного отношения бесступенчатой трансмиссии система управления 11 автоматически включает приводной двигатель 1 и посредством сервопривода 12 контролировано увеличивает передаточное отношение управляемой трансмиссии 3, поддерживая неизменной частоту вращения промежуточного звена трансмиссии. В процессе движения приводной двигатель 1 работает циклически только в режиме номинальной эффективности независимо от режима движения транспортного средства (график Е, фиг. 2). Изменение направления движения транспортного средства обеспечивается реверсированием редуктора 5, а приемы управления аналогичны движению вперед. Таким образом, электромеханический привод транспортного средства обеспечивает рациональное использование энергии автономных источников питания вследствие увеличения эффективности приводного двигателя с 15-25% до 90-95% в режиме частичных нагрузок (городской режим движения транспортного средства), эффективную электрическую и механическую рекуперацию кинетической энергии при рекуперативном торможении, высокие динамические характеристики вследствие использования кинетической энергии реверсивного гироаккумулятора. Все элементы привода хорошо технологически отработаны в современном автомобилестроении. Привод позволят использовать приводной двигатель постоянного тока прямого включения, что исключает необходимость применения значительной массы и стоимости электронных регуляторов или инверторов. ФОРМУЛА ИЗОБРЕТЕНИЯ Электромеханический привод транспортного средства, содержащий электрический двигатель, соединенный с механизмом движения посредством редуктора, имеющего быстроходный вал, сопряженный с валом двигателя, маховик и муфту, отличающийся тем, что редуктор выполнен реверсивным, маховик соединен с ротором двигателя, муфта установлена на быстроходном валу редуктора и выполнена управляемой, а сопряжение быстроходного вала редуктора с валом двигателя выполнено посредством бесступенчатой управляемой трансмиссии, сервопривод управления которой соединен с выходом системы управления, вход которой соединен с системой ABS транспортного средства, органами управления тормозом и акселератором, сенсор которого посредством системы управления соединен с сервоприводом управляемой муфты.
МПК / Метки
МПК: B60W 10/02, B60W 10/08, B60W 40/12, B60L 11/00
Метки: электромеханический, транспортного, привод, средства
Код ссылки
<a href="https://eas.patents.su/5-8000-elektromehanicheskijj-privod-transportnogo-sredstva.html" rel="bookmark" title="База патентов Евразийского Союза">Электромеханический привод транспортного средства</a>
Электромеханический регулируемый привод выгребной цепи щебнеочистительной машины

Номер патента: 5431
Опубликовано: 24.02.2005
Авторы: Самысько Василий Александрович, Начинкин Виктор Павлович, Никончук Михаил Олегович, Логинов Михаил Аркадьевич, Чвоков Владимир Дмитриевич, Волков Алексей Сергеевич, Жук Ольга Майевна
МПК: F16H 37/06, E01B 27/04
Метки: щебнеочистительной, выгребной, электромеханический, машины, регулируемый, привод, цепи
Формула / Реферат:
1. Электромеханический регулируемый привод выгребной цепи щебнеочистительной машины, включающий приводные двигатели, редуктор, передающие механизмы, пусковую и блокировочную аппаратуру, контрольно-измерительную или автоматизированную систему управления исполнительными органами, отличающийся тем, что электромеханический привод снабжен частотнорегулируемым асинхронным электродвигателем, работающим совместно с нерегулируемыми приводными...
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства
Номер патента: 6782
Опубликовано: 28.04.2006
Автор: Сухолитко Валентин Афанасьевич
Метки: средства, бедствие, поддержки, определения, способ, оператора, терпящего, транспортного, местоположения
Формула / Реферат:
Способ определения местоположения терпящего бедствие транспортного средства и поддержки оператора транспортного средства, заключающийся в том, что формируют базу знаний по набору возможных программ, а также по результатам анализа и опыта исследований аварий и катастроф с помощью экспертной системы оценивают работоспособность оператора транспортного средства, бортового оборудования транспортного средства и работу оператора, прогнозируют аварийные...
Способ торможения транспортного средства
Номер патента: 6127
Опубликовано: 27.10.2005
Автор: Валиев Ринат Анисович
МПК: B60T 8/176, B60T 8/00, B60T 1/02...
Метки: транспортного, торможения, средства, способ
Формула / Реферат:
Способ торможения транспортного средства, включающий замедление вращения колес вплоть до их полной остановки, отличающийся тем, что для торможения транспортного средства плоскости вращения управляемых колес разворачивают в разные стороны относительно направления перемещения транспортного средства, а эффективность торможения регулируют изменением угла разворота, чем больше угол между плоскостями вращения, тем эффективнее торможение. ...
Упор для капота транспортного средства
Номер патента: 4011
Опубликовано: 25.12.2003
Автор: Кин Эрик Алберт
МПК: B62D 25/12
Метки: упор, транспортного, капота, средства
Формула / Реферат:
1. Упор для капота (10) транспортного средства, к которому капот (10) присоединен с возможностью поворота относительно оси вращения, содержащий первый рычаг (16), имеющий один конец, присоединенный к транспортному средству с возможностью поворота относительно оси вращения, и второй конец, второй рычаг (30), имеющий один конец, соединенный со вторым концом первого рычага (16) с возможностью вращения, и второй конец, подъемный стержень (40),...
Способ и устройство для повторного разгона транспортного средства, оборудованного воздушными компрессорами высокого давления.
Номер патента: 834
Опубликовано: 24.04.2000
Авторы: Негр Сирил, Негр Ги
МПК: F02B 75/10, B60T 1/10
Метки: высокого, транспортного, давления, оборудованного, устройство, разгона, средства, воздушными, повторного, способ, компрессорами
Формула / Реферат:
1. Способ повторного разгона транспортного средства, оборудованного двигателем, не выделяющим вредные выбросы, или двигателем с контролируемыми вредными выбросами, содержащим отдельную камеру сгорания (2), в которую вводят при работе с воздухом определенное количество добавочного сжатого и не образующего вредных выбросов газа, поступающего из главной внешней емкости (23), в которой этот сжатый газ находится под высоким давлением и по существу...
Предыдущий патент: Способ заделки торцевой или обрезной кромки сотовых плит
Следующий патент: Конвейер
Случайный патент: Способ и сервер для предоставления кода мобильности