Система уравновешивания робота с опорами путем переноса текучей среды
Формула / Реферат
1. Система уравновешивания для робота, имеющего по меньшей мере две опоры (4), содержащая
по меньшей мере две емкости (5) для балансной текучей среды, содержащие балансную текучую среду (7),
насосы (2) балансной текучей среды для перекачивания балансной текучей среды из одной емкости в другую,
каналы (6) для балансной текучей среды, соединяющие емкости (5) для балансной текучей среды,
отличающаяся тем, что по меньшей мере одна емкость (5) для балансной текучей среды располагается в нижней части каждой опоры (4).
2. Система уравновешивания по п.1, отличающаяся тем, что текучая среда (7) распределяется по емкостям (5) для балансной текучей среды так, что обеспечивается условие, при котором проекция центра тяжести (8) робота находится под стоящим основанием или в плоскости, образованной основанием, касающимся поверхности.
3. Система уравновешивания по любому из предыдущих пп.1-2, отличающаяся тем, что когда робот готов к перемещению, вся текучая среда (7) переносится в емкость (5) стоящей опоры.
4. Система уравновешивания по любому из предыдущих пп.1-3, отличающаяся тем, что перемещение робота обеспечивается движением опоры или опор с пустыми емкостями (5) для балансной текучей среды, поднимаемых двигателями (1) движения, и текучей средой (7), собирающейся в емкостях (5) для балансной текучей среды в опорах, которые контактируют с поверхностью, обеспечивая расположение проекции центра тяжести под стоящим основанием или внутри плоскости, сформированной опорой, имеющей контакт с поверхностью.
5. Система уравновешивания по п.4, отличающаяся тем, что для того, чтобы робот закончил перемещение, текучая среда (7) переносится в емкость (5) для балансной текучей среды, расположенную на движущейся опоре.
6. Система уравновешивания по любому из предыдущих пп.1-5, отличающаяся тем, что текучая среда (7) является любым типом жидкости, газа, твердого вещества, способного к переносу, смеси твердое вещество-жидкость, смеси твердое вещество-газ, смеси жидкость-газ, смеси твердое вещество-жидкость-газ или любое твердое вещество преимущественно в форме гранул.
7. Система уравновешивания по любому из предыдущих пп.1-6, отличающаяся тем, что дополнительная емкость (5) для балансной текучей среды помещается в верхней части опоры (4) и/или в корпусе робота.
8. Система уравновешивания по любому из предыдущих пп.1-7, отличающаяся тем, что емкость (5) выполняется как единое целое.
9. Система уравновешивания по любому из предыдущих пп.1-8, отличающаяся тем, что каналы (6) для переноса текучей среды выполняются из гибкого материала.
10. Система уравновешивания по любому из предыдущих пп.1-9, отличающаяся тем, что каналы (6) для переноса текучей среды соединяют емкости (5) для балансной текучей среды внутри или снаружи робота, напрямую или проводя через различные части корпуса робота.
11. Система уравновешивания по любому из предыдущих пп.1-10, отличающаяся тем, что насосы (2) текучей среды являются однонаправленными или реверсивными насосами и/или такими являются двигатели.
12. Система уравновешивания по любому из предыдущих пп.1-11, отличающаяся тем, что она применяется для роботов на колесах.
13. Система уравновешивания по любому из предыдущих пп.1-12, отличающаяся тем, что количество емкостей (5) для балансной текучей среды составляет одну или более на каждой стороне.


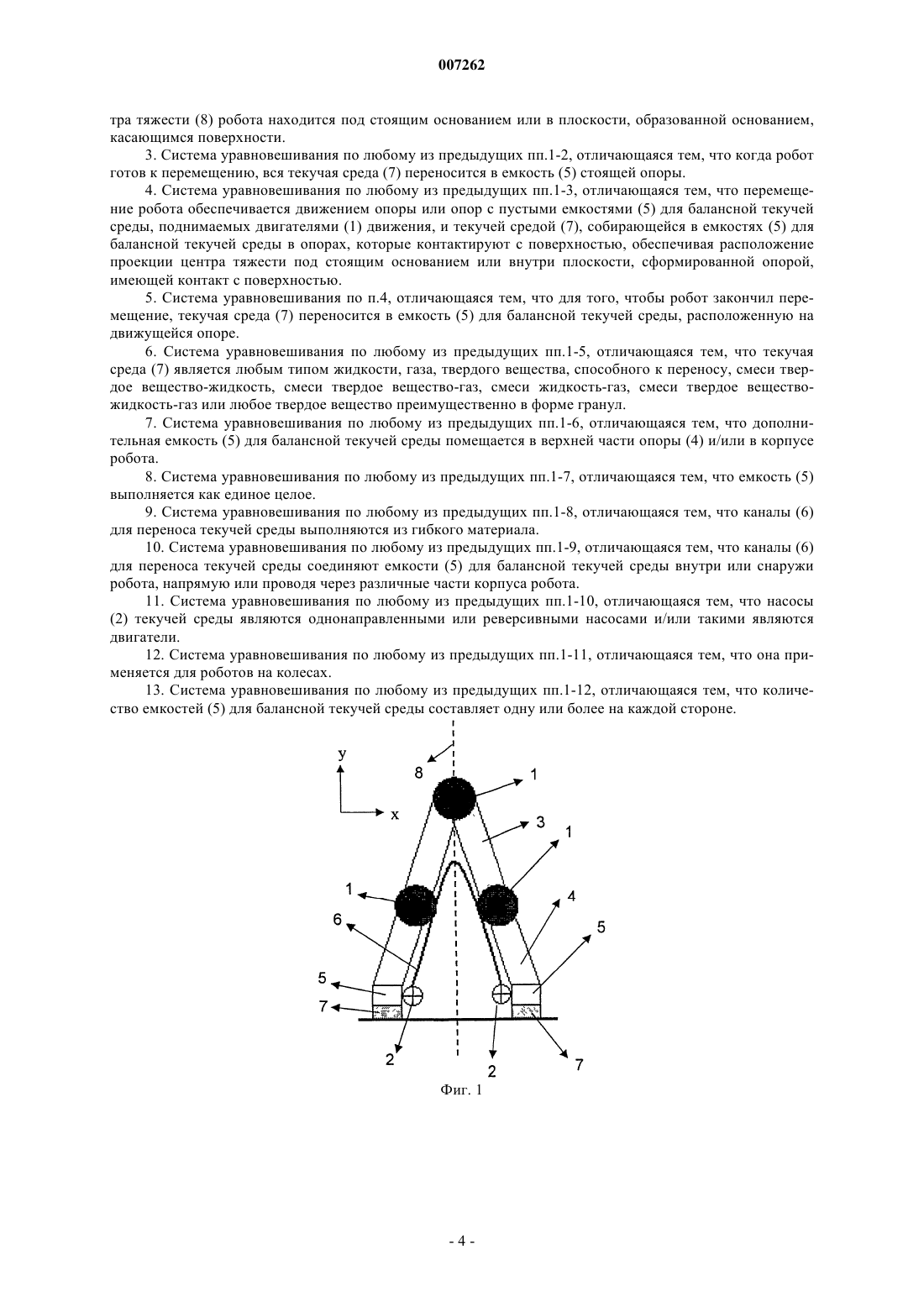
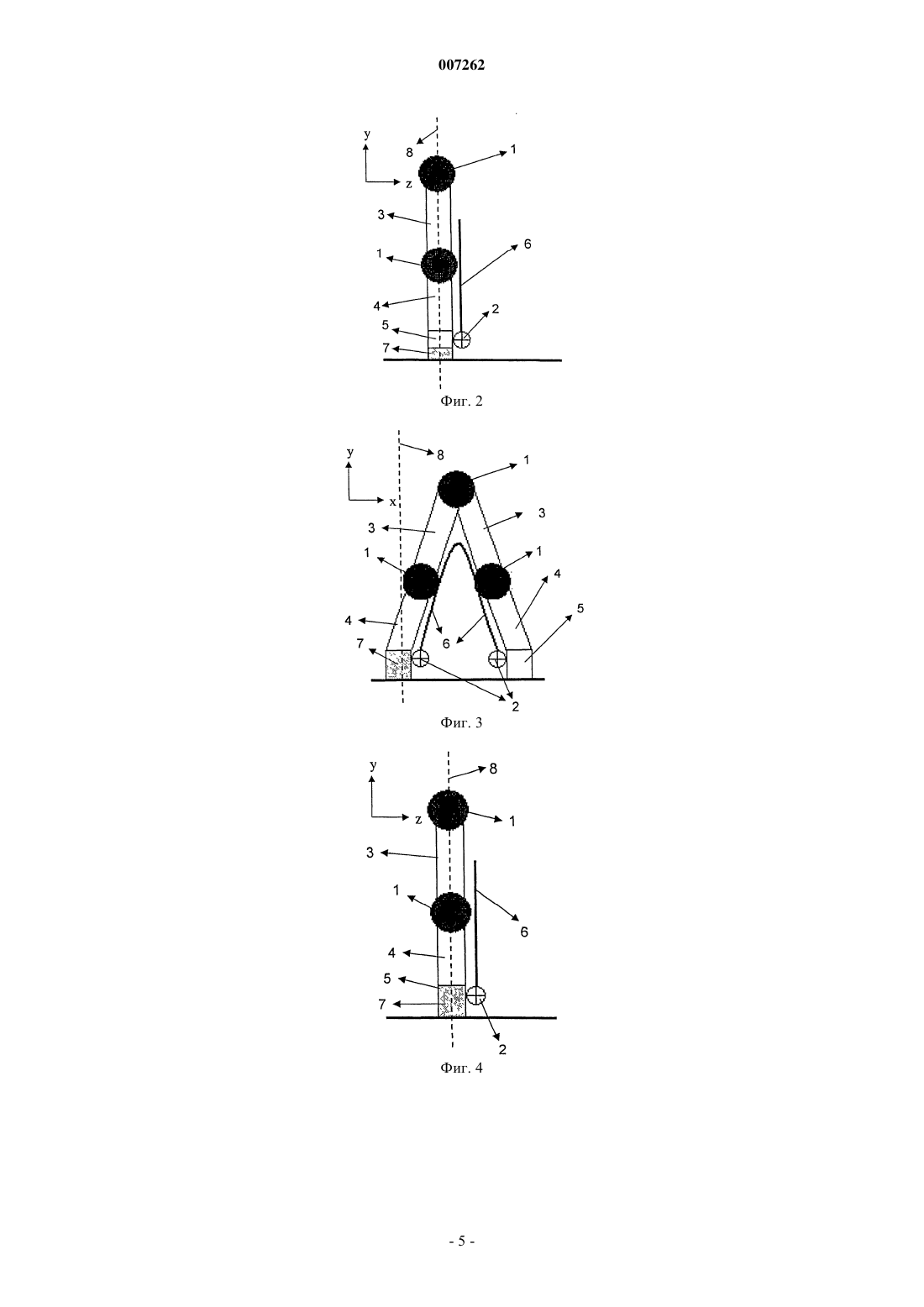
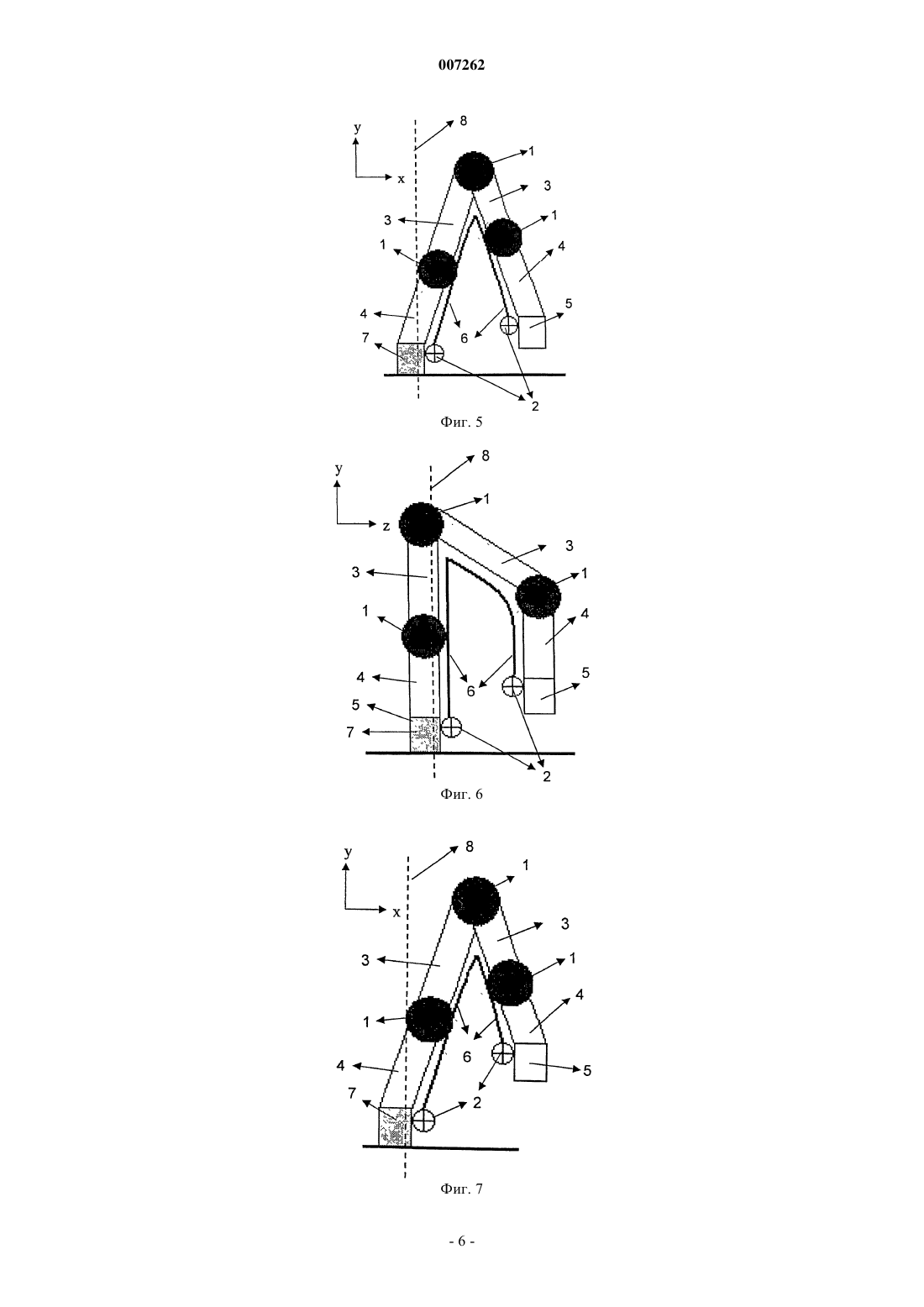
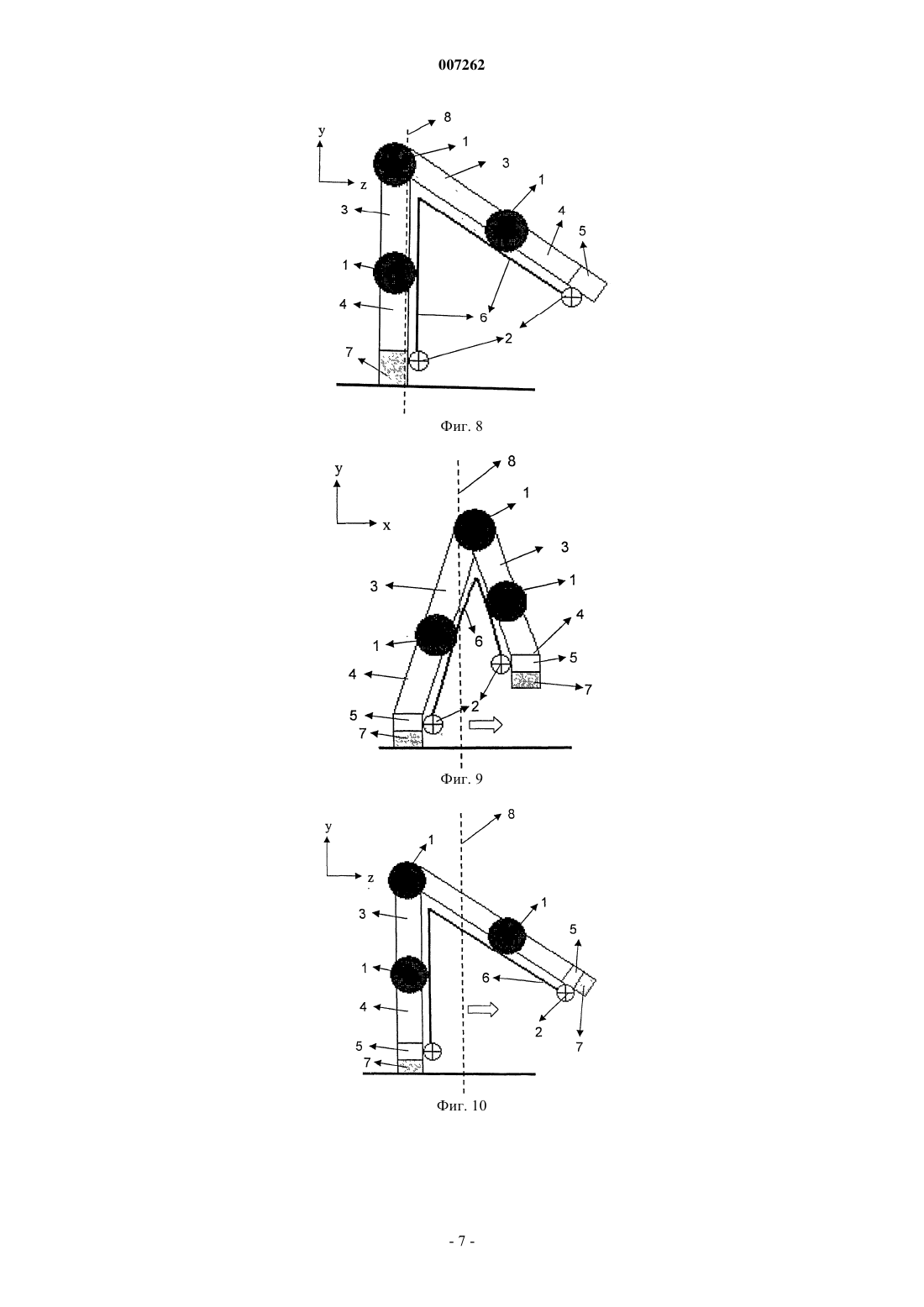
Текст
007262 Данное изобретение относится к системе уравновешивания двухопорных или многоопорных объектов (роботов) в то время, когда они движутся и/или переносят груз. Для роботов очень важно, чтобы двухопорные или многоопорные роботы могли передвигаться, не теряя балансировки (не опрокидываясь), и эффективно выполнять команды. Для того чтобы двухопорные или многоопорные роботы не опрокидывались при перемещении,поднятии груза или толкании объектов, проекция центра тяжести должна быть под стоящей опорой или в плоскости, образованной опорой, которая касается поверхности. Для того чтобы обеспечить равновесие в то время, как двухопорный или многоопорный робот перемещается, в уровне техники требуется, чтобы корпус нагибался с тем, чтобы центр тяжести был под стоящей опорой или в плоскости, образованной опорой, которая касается поверхности. Одна из проблем, которая часто существует у этих многоопорных роботов, у которых равновесие сохраняется благодаря сгибанию их корпуса, заключается в том, что их движение медленное. В дополнение к этому сложный процесс производства приводит к длительному производственному циклу и высокой себестоимости производства. Кроме того, роботы такого типа очень часто выходят из строя. Главная проблема двухопорных роботов - их равновесие. Равновесие можно достигнуть, устанавливая вертикальную проекцию центра тяжести между двумя опорами робота. В обычном способе при подъеме одной опоры робот сохраняет равновесие, сгибая верхнюю часть корпуса в сторону, противоположную поднятой опоре, и таким образом получая вертикальную проекцию его центра тяжести под другой (стоящей) опорой. После того как начинается движение, это выражение баланса продолжается в течение всего движения, пока робот наклоняется и/или выпрямляет свой корпус или другие выступающие части, пока он не остановится. Другая технология, использованная для равновесия двухопорных роботов, представляет собой последовательное подпрыгивание на опорах. Недостаток этого технического решения заключается в том,что робот не "идет", а должен прыгать, чтобы продвигаться вперед. В дополнение к этому, робот не может сохранять равновесие, не затрачивая энергии, когда он не движется, потому что он может сохранять равновесие только тогда, когда он затрачивает энергию. Целью данного изобретения является создание системы уравновешивания для двухопорных или многоопорных роботов, которая позволит производить роботов, у которых более сбалансированное движение в отличие от предыдущих вариантов, причем робот может переносить груз и использовать промышленные станки, т.е. может осуществлять все двигательные функции человека. В прилагаемых чертежах поясняется система уравновешивания для двухопорных или многоопорных роботов, разработанная в данном изобретении. Чертежи в приложении показывают с помощью схематических диаграмм применение системы в двухопорном роботе в качестве примера. Такая система может также применяться и в многоопорных роботах. Ниже приводится описание чертежей. Фиг. 1 - фронтальный вид двухопорного робота, стоящего на обоих основаниях опор с балансной текучей средой, равномерно распределенной по обеим емкостям; фиг. 2 - вид сбоку двухопорного робота, стоящего на обоих основаниях опор с балансной текучей средой, равномерно распределенной по обеим емкостям; фиг. 3 - фронтальный вид двухопорного робота, стоящего на обоих основаниях опор с балансной текучей средой, находящейся только в одной емкости; фиг. 4 - вид сбоку двухопорного робота, стоящего на обоих основаниях опор с балансной текучей средой, находящейся только в одной емкости; фиг. 5 - фронтальный вид двухопорного робота, опора с пустой емкостью поднята (емкость параллельна поверхности, и колено согнуто); фиг. 6 - вид сбоку двухопорного робота, опора с пустой емкостью поднята (емкость параллельна поверхности, и колено согнуто); фиг. 7 - фронтальный вид двухопорного робота, опора с пустой емкостью поднята (емкость не параллельна поверхности, и колено не согнуто); фиг. 8 - вид сбоку двухопорного робота, опора с пустой емкостью поднята (емкость не параллельна поверхности, и колено не согнуто); фиг. 9 - фронтальный вид двухопорного робота, опора с пустой емкостью вверху, балансная текучая среда начинает перетекать из стоящего основания с полной емкостью в пустую емкость; фиг. 10 - вид двухопорного робота, опора с пустой емкостью вверху, балансная текучая среда начинает перетекать из стоящего основания с полной емкостью в пустую емкость; фиг. 11 - фронтальный виддвухопорного робота, стоящего на обоих основаниях с балансной текучей средой, равномерно распределенной по обеим емкостям; фиг. 12 - вид сбоку двухопорного робота, стоящего на обоих основаниях с балансной текучей средой, равномерно распределенной по обеим емкостям; фиг. 13 - фронтальный вид двухопорного робота, стоящего на основании с полной емкостью и с поднятым основанием с пустой емкостью; фиг. 14 - вид сбоку двухопорного робота, стоящего на основании с полной емкостью и с поднятым основанием с пустой емкостью.-1 007262 Для того чтобы лучше пояснить систему уравновешивания для двухопорного или многоопорного робота по данному изобретению, элементы устройства обозначены числами. Ниже приводится перечень пронумерованных частей: 1 - двигатели перемещения,2 - насосы балансной текучей среды,3 - опоры (верхняя часть),4 - опоры (нижняя часть),5 - емкости для текучей среды,6 - каналы для переноса балансной текучей среды,7 - балансная текучая среда,8 - вертикальная ось, проходящая через центр тяжести. Главными элементами предлагаемой этим изобретением системы уравновешивания двухопорных и многоопорных роботов являются насосы (2) балансной текучей среды, емкости для балансной текучей среды, каналы (6) для переноса балансной текучей среды и балансная текучая среда (7). Балансная текучая среда (7) может быть любой жидкостью, или газом, или смесью твердая фазажидкость, или смесью твердая фаза-газ, или смесью жидкость-газ, или смесью твердая фаза-жидкостьгаз, или любое твердое вещество (преимущество в форме гранул), которое может переноситься. Любое твердое вещество, которое может переноситься между опорами может быть использовано в качестве балансной текучей среды (7). Емкости (5) для текучей среды преимущественно устанавливаются у конца основания опоры, контактирующего с поверхностью. Если необходимо, емкости (5) могут размещаться у нижней части опоры (4) или на любой части корпуса. Балансных емкостей (5) для текучей среды может быть более одной. Балансной емкостью (5) для текучей среды может быть единственная емкость. Канал (6) для переноса балансной текучей среды позволяет осуществлять перенос между емкостями(5). Канал (6) для переноса балансной текучей среды может быть один или более одного. Канал (6) для переноса балансной текучей среды преимущественно изготавливается из гибкого (эластичного) материала. Канал (6) соединяет емкости (5) для текучей среды внутри робота или снаружи него, напрямую или через различные части корпуса. Насосы (2) балансной текучей среды служат для переноса текучей среды (7) между емкостями (5). Может быть более одного насоса (2). Насосы (2) балансной текучей среды могут быть однонаправленными или реверсивными насосами и/или такими могут быть их двигатели. В связи с тем, что проекция центра тяжести (8) должна быть под стоящим основанием, или в пределах плоскости, образованной основанием опоры, которое касается поверхности, для того, чтобы двухопорные или многоопорные роботы не опрокидывались при движении, подъеме груза или толкании предметов; данное изобретение осуществляет этот принцип путем переноса балансной текучей среды (7) между емкостями (5). Работа изобретенной системы уравновешивания, разработанная для двухопорных и многоопорных роботов, поясняется далее с использованием приведенного примера двухопорного робота. Система уравновешивания в применении к двухопорному роботу включает две верхних опоры (3) на двух сторонах, двигатель (1) перемещения, который соединяет и перемещает опоры вперед и назад,два двигателя (1) перемещения, которые соединяют нижние опоры (4) с верхними опорами (3) и перемещают нижние опоры (4) вперед и назад, две нижние опоры (4), две емкости для балансной текучей сред,смонтированные под нижней частью, соприкасающейся с поверхностью (5), насос (2) балансной текучей среды, соединенный с каждой емкостью (5) для текучей среды и который переносит балансную текучую среду (7) из одной емкости (5) в другую или обратно в ту же емкость (5), и канал (6), который соединяет эти емкости (5) и обеспечивает перенос текучей среды. Для лучшего понимания на фигурах показаны координатные оси. Горизонтальная ось в направлении двух опор является осью х, вертикальная ось является осью у и ортогональная ось к осям х и у является осью z. На нечетных фигурах (фиг. 1, 3, 5, 7, 9, 11, 13) положение балансной текучей среды (7) соответствует движению, изменение проекции центра тяжести показано на оси х; на четных фигурах (фиг. 2,4, 6, 8, 10, 12, 14) изменение положения проекции центра тяжести показано на оси z. Применение изобретенной системы уравновешивания для двухопорных и многоопорных роботов на примере двухопорных роботов поясняется далее в 7 различных позициях. Состояние балансной текучей среды (7) показано для каждой позиции. Позиция 1 (фиг. 1 и 2). В этой позиции двухопорный робот стоит на обоих основаниях. Проекция центра тяжести (8) находится точно в середине линии между двумя основаниями, как видно на фронтальном виде и виде сбоку(фиг. 1 и 2). Эта позиция называется стоячей позицией, и робот полностью уравновешен. Балансная текучая среда (7) распространена по обеим емкостям в равном отношении, и это означает, что количество балансной текучей среды (7) в каждой емкости (5) одинаково.-2 007262 Позиция 2 (фиг. 3 и 4). В этой позиции робот готовится к движению. Вся балансная текучая среда (7) находится в емкости той опоры, которая остается неподвижной. Опора с пустой емкостью будет той опорой, которая начинает движение. Движущаяся опора (т.е. при хождении взад и вперед, подъеме по лестницам, хождении по неровной поверхности и поворотах налево и направо) не имеет балансной текучей среды. В этой позиции проекция центра тяжести (8) находится в пределах площади под стоящей опорой с полной емкостью. Поэтому робот не только в этом положении сохраняет равновесие, но и тогда, когда другая опора начинает двигаться. Позиция 3 (фиг. 5 и 6). Это первая позиция, в которой робот действительно перемещается. В этой позиции опора с пустой емкостью (5) поднята вверх и перемещается с помощью двигателей (1) перемещения. В этой позиции проекция центра тяжести (8) либо не изменяется, либо немного смещается на фронтальном виде (фиг. 3 и 5). На виде сбоку (фиг. 4 и 6) проекция центра тяжести (8) смещается в направлении движущейся опоры. В этой позиции робот сохраняет равновесие, потому что проекция центра тяжести (8) все еще находится под стоящим основанием. Позиция 4 (фиг. 7 и 8). В этой позиции опора с пустой емкостью (5) поднимается вверх с помощью двигателей (1) перемещения до максимальной высоты. В этой позиции проекция центра тяжести (8) проекция центра тяжести(8) либо не изменяется, либо немного смещается на фронтальном виде (фиг. 3, 5 и 7). Но на виде сбоку(фиг. 4, 6 и 8) можно видеть, что проекция центра тяжести (8) смещается в направлении движущейся опоры. Система все еще находится в равновесии, потому что проекция центра тяжести (8) все еще находится в пределах площади под стоящим основанием с полной емкостью. Позиция 5 (фиг. 9 и 10). В этой позиции балансная текучая среда (7) начинает перетекать из емкости (5), которая укреплена на стоящей опоре, в пустую емкость (на другой опоре) с помощью насосов (2) для переноса балансной текучей среды. В это время двухопорный робот теряет равновесие и начинает падать на шагающее основание. В связи с тем, что центр тяжести смещается в сторону емкости (5), в которую балансная текучая среда начинает перетекать, робот перемещается в указанном направлении, не опрокидываясь. Позиция 6 (фиг. 11 и 12). В этой позиции робот окончательно опирается на шагающее основание в связи с временной потерей равновесия. Оба основания касаются поверхности. Балансная текучая среда продолжает перетекать из одной емкости (на опоре, которая стоит) в другую (на опоре, которая перемещается) до тех пор, пока обе емкости не окажутся наполненными равными количествами текучей среды (7). Проекция центра тяжести(8) находится в центре линии между опорами, и робот сохраняет равновесие. Позиция 7 (фиг. 13 и 14). В этой позиции опора с пустой емкостью поднимается благодаря весу текучей среды и усилию,прилагаемому двигателями (1). Проекция центра тяжести находится на стоящем основании с полной емкостью. Робот сохраняет равновесие. Робот движется в желательном направлении благодаря движению опоры с пустой емкостью. Система уравновешивания для двухопорных и многоопорных роботов, разработанная и изложенная в данном изобретении, может использоваться в любом роботе, который может двигаться, ходить по неровной или наклонной поверхности, взбираться по лестницам, переносить груз, выполнять любую работу и повиноваться командам. Система уравновешивания для двухопорных и многоопорных роботов, разработанная и изложенная в данном изобретении, может использоваться в шагающих устройствах для инвалидов, в искусственных ногах, в игрушках и в роботах, которые могут совершать любые физические действия, которые может выполнять человек. Система уравновешивания для двухопорных и многоопорных роботов, разработанная и изложенная в данном изобретении, может применяться не только в роботах на опорах, но и в роботах на колесах. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система уравновешивания для робота, имеющего по меньшей мере две опоры (4), содержащая по меньшей мере две емкости (5) для балансной текучей среды, содержащие балансную текучую среду (7),насосы (2) балансной текучей среды для перекачивания балансной текучей среды из одной емкости в другую,каналы (6) для балансной текучей среды, соединяющие емкости (5) для балансной текучей среды,отличающаяся тем, что по меньшей мере одна емкость (5) для балансной текучей среды располагается в нижней части каждой опоры (4). 2. Система уравновешивания по п.1, отличающаяся тем, что текучая среда (7) распределяется по емкостям (5) для балансной текучей среды так, что обеспечивается условие, при котором проекция цен-3 007262 тра тяжести (8) робота находится под стоящим основанием или в плоскости, образованной основанием,касающимся поверхности. 3. Система уравновешивания по любому из предыдущих пп.1-2, отличающаяся тем, что когда робот готов к перемещению, вся текучая среда (7) переносится в емкость (5) стоящей опоры. 4. Система уравновешивания по любому из предыдущих пп.1-3, отличающаяся тем, что перемещение робота обеспечивается движением опоры или опор с пустыми емкостями (5) для балансной текучей среды, поднимаемых двигателями (1) движения, и текучей средой (7), собирающейся в емкостях (5) для балансной текучей среды в опорах, которые контактируют с поверхностью, обеспечивая расположение проекции центра тяжести под стоящим основанием или внутри плоскости, сформированной опорой,имеющей контакт с поверхностью. 5. Система уравновешивания по п.4, отличающаяся тем, что для того, чтобы робот закончил перемещение, текучая среда (7) переносится в емкость (5) для балансной текучей среды, расположенную на движущейся опоре. 6. Система уравновешивания по любому из предыдущих пп.1-5, отличающаяся тем, что текучая среда (7) является любым типом жидкости, газа, твердого вещества, способного к переносу, смеси твердое вещество-жидкость, смеси твердое вещество-газ, смеси жидкость-газ, смеси твердое веществожидкость-газ или любое твердое вещество преимущественно в форме гранул. 7. Система уравновешивания по любому из предыдущих пп.1-6, отличающаяся тем, что дополнительная емкость (5) для балансной текучей среды помещается в верхней части опоры (4) и/или в корпусе робота. 8. Система уравновешивания по любому из предыдущих пп.1-7, отличающаяся тем, что емкость (5) выполняется как единое целое. 9. Система уравновешивания по любому из предыдущих пп.1-8, отличающаяся тем, что каналы (6) для переноса текучей среды выполняются из гибкого материала. 10. Система уравновешивания по любому из предыдущих пп.1-9, отличающаяся тем, что каналы (6) для переноса текучей среды соединяют емкости (5) для балансной текучей среды внутри или снаружи робота, напрямую или проводя через различные части корпуса робота. 11. Система уравновешивания по любому из предыдущих пп.1-10, отличающаяся тем, что насосы(2) текучей среды являются однонаправленными или реверсивными насосами и/или такими являются двигатели. 12. Система уравновешивания по любому из предыдущих пп.1-11, отличающаяся тем, что она применяется для роботов на колесах. 13. Система уравновешивания по любому из предыдущих пп.1-12, отличающаяся тем, что количество емкостей (5) для балансной текучей среды составляет одну или более на каждой стороне.
МПК / Метки
МПК: B62D 57/032, B25J 19/00
Метки: опорами, переноса, среды, уравновешивания, робота, система, текучей, путем
Код ссылки
<a href="https://eas.patents.su/10-7262-sistema-uravnoveshivaniya-robota-s-oporami-putem-perenosa-tekuchejj-sredy.html" rel="bookmark" title="База патентов Евразийского Союза">Система уравновешивания робота с опорами путем переноса текучей среды</a>
Система для увеличения потока текучей среды в буровой скважине
Номер патента: 3012
Опубликовано: 26.12.2002
Авторы: Гландт Карлос Альберто, Уорралл Роберт Николас, Далинг Рулоф, Амори Марк Эмманюэль
МПК: E21B 43/12, F04D 13/10
Метки: скважине, увеличения, потока, среды, буровой, система, текучей
Формула / Реферат:
1. Система для увеличения потока текучей среды в эксплуатационную скважину (1) углеводородной текучей среды и через нее, содержащая несколько усилителей (4) потока, содержащих узлы насоса (15) и двигателя (17) для управления потоком текучей среды из различных участков дренажной или коллекторной приточной зоны (5) скважины (1) в эксплуатационную насосно-компрессорную трубу (2) или хвостовик в скважине, отличающаяся тем, что усилители (4) потока...
Способ и система для подавления и контроля образования пробок в потоке многофазовой текучей среды
Номер патента: 3655
Опубликовано: 28.08.2003
Авторы: Хенкес Рудольфус Алойсиус Вийнандус Мария, Хандрикман Гритинус, Вренегор Алойсиус Йоханнес Николас, Селен Маринус Герардус Вильхельмус Мария
МПК: F17D 1/00, E21B 43/34, B01D 19/00...
Метки: среды, способ, многофазовой, текучей, потоке, подавления, контроля, пробок, система, образования
Формула / Реферат:
1. Способ подавления и контроля образования пробок жидкости и выбросов газа в потоке многофазовой текучей среды, протекающем из трубопровода (1) в сепаратор (9) газа/жидкости, в отверстии (13) для выпуска жидкости которого установлен клапан (15) управления потоком жидкости, а в отверстии (14) для выпуска газа установлен клапан (16) управления потоком газа, содержащий измерение, по меньшей мере, одной переменной управления, выбранной из группы,...
Система для смешивания текучей среды
Номер патента: 4368
Опубликовано: 29.04.2004
Авторы: Виньо Пьер, Рондо Жоэль
МПК: G05D 11/02, E21B 33/13, B28C 7/04...
Метки: среды, смешивания, система, текучей
Формула / Реферат:
1. Система для смешивания цементного раствора, содержащая средство (101) для подачи жидкости, включающее приспособление (104) для измерения количества поступающей жидкости, средство (108) для подачи твердого цемента, смеситель, включающий ванну (114), в которую поступают жидкость и твердый цемент и которая содержит выпускное отверстие (124) для выдачи материалов из смесителя в раздаточную систему, расходомер (128), расположенный в выпускном...
Система и способ регулирования расхода и давления текучей среды
Номер патента: 3044
Опубликовано: 26.12.2002
Авторы: Сатер Роджер, Кейн Лестер Л.
МПК: F16K 31/12
Метки: расхода, система, способ, среды, регулирования, текучей, давления
Формула / Реферат:
1. Система регулирования текучей среды, содержащая корпус, имеющий впускной канал, осевой канал, одна часть которого образует выпускной канал, и камеру, дроссельный элемент, приспособленный для перемещения в корпусе для регулирования потока текучей среды от впускного канала к выпускному каналу, причем текучая среда прикладывает усилие к одному торцу дроссельного элемента, источник регулирующей жидкости, подсоединенный к камере, так что...
Способ обработки древесины путем использования текучей среды-носителя под высоким давлением без повреждения древесины
Номер патента: 6343
Опубликовано: 29.12.2005
Авторы: Ларсен Томми, Иверсен Стин Бруммерстед, Фелсванг Карстен, Хенриксен Оле
МПК: B27K 3/08, B01D 11/02
Метки: способ, среды-носителя, высоким, повреждения, обработки, древесины, давлением, текучей, путем, использования
Формула / Реферат:
1. Способ обработки древесины, подверженной повреждению, текучей средой-носителем под высоким давлением, отличающийся тем, что текучей среде не дают возможности существовать в ее жидком виде внутри древесины. 2. Способ по п.1, в котором обработку выбирают из пропитки, экстрагирования, окрашивания или сушки. 3. Способ по п.1 или 2, включающий в себя следующие операции: a) в резервуар загружают древесину, подлежащую обработке; b) в резервуаре...
Предыдущий патент: Соединительное устройство для вала
Следующий патент: Устройство для управления воздушным потоком при формовании стекла в форме
Случайный патент: Ослабленная популяция ротавирусов и содержащая ее вакцинная композиция