Автономная система обеспечения безопасности для пользователей симуляторов транспортных средств
Формула / Реферат
1. Устройство для безопасного использования симулятора транспортного средства, в частности летного тренажера, в виде кабины (3) симулятора, приводимой в действие посредством шестиосного робота, содержащее:
а) зону доступа, которая открывается только для санкционированных пользователей и имеет набор защит, при этом зона доступа образована по меньшей мере одной дверью, защищенной по меньшей мере одним датчиком (11) контроля, и каждая дверь ведет к посадочным ступеням (6), которые контролируются посредством слоя датчиков на предмет входа человека и/или веса входящего человека;
б) спасательный блок (13), который способен перемещаться по ходовому рельсу (14) в любое место рабочей зоны симулятора транспортного средства, при этом указанный спасательный блок имеет спасательную платформу (25), поручень (24) и спасательный наклонный лоток (26);
в) амортизирующую поверхность, установленную по всей рабочей зоне, при этом указанная поверхность простирается по всей рабочей зоне кабины (3); и
г) проекционную поверхность (33, 34), состоящую из набора плоскостей.
2. Устройство по п.1, отличающееся тем, что кабина (3) закреплена на платформе (32), которая, в свою очередь, приводится в действие не только одним шестиосным роботом, а по меньшей мере двумя шестиосными роботами.
3. Устройство по п.1 или 2, отличающееся тем, что амортизирующая поверхность, установленная в зоне безопасности, состоит из покрытия, образованного множеством устройств, аналогичных надувной подушке безопасности.
4. Устройство по любому из пп.1-3, отличающееся тем, что приближающиеся отказы компонентов робота обнаруживаются посредством акустического и/или оптического средства, а отказы электрических систем обнаруживаются с помощью средства обнаружения дыма, при этом указанные отказы учитываются при программировании.
5. Устройство по одному из предыдущих пунктов, отличающееся тем, что в случае заранее заданной индикации отказа или наличия постороннего объекта включается сигнал тревоги.
6. Способ безопасного использования симулятора транспортного средства, в частности летного тренажера, в виде кабины (3) симулятора, приводимой в действие посредством шестиосного робота, включающий использование устройства по п.1.
7. Способ по п.6, отличающийся тем, что кабину (3) приводят в действие не только одним шестиосным роботом, а по меньшей мере двумя шестиосными роботами.
8. Способ по п.6 или 7, отличающийся тем, что амортизирующая поверхность, установленная в зоне безопасности, образована покрытием, состоящим из множества устройств, аналогичных надувной подушке безопасности.
9. Способ по п.7 или 8, отличающийся тем, что приближающиеся отказы компонентов робота обнаруживают посредством акустического и/или оптического средства, а отказы электрических систем обнаруживают с помощью средства обнаружения дыма, при этом указанные отказы учитывают при программировании.
10. Способ по любому из пп.6-9, отличающийся тем, что в случае заранее заданной индикации отказа или наличия постороннего объекта включают сигнал тревоги.

Текст
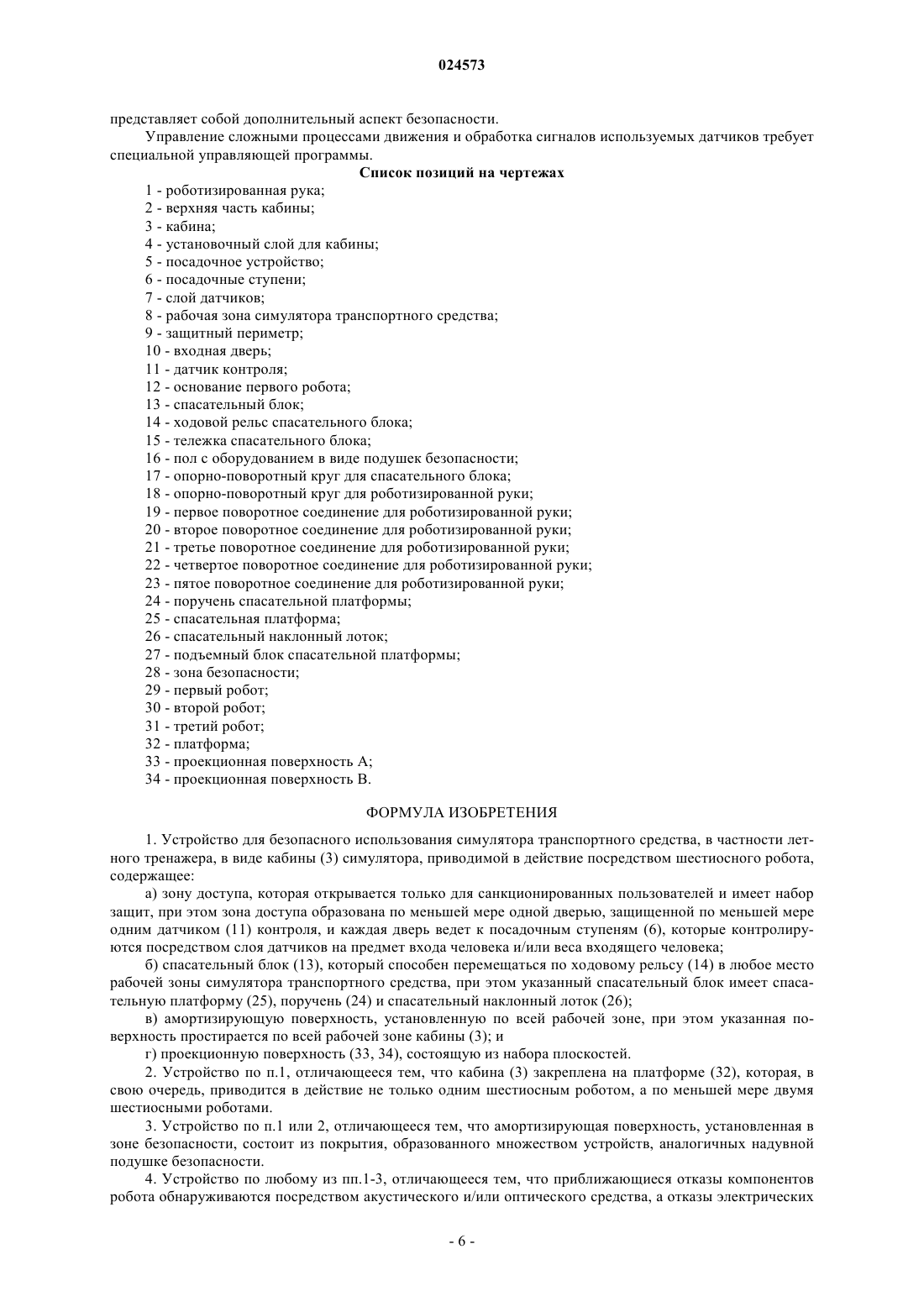
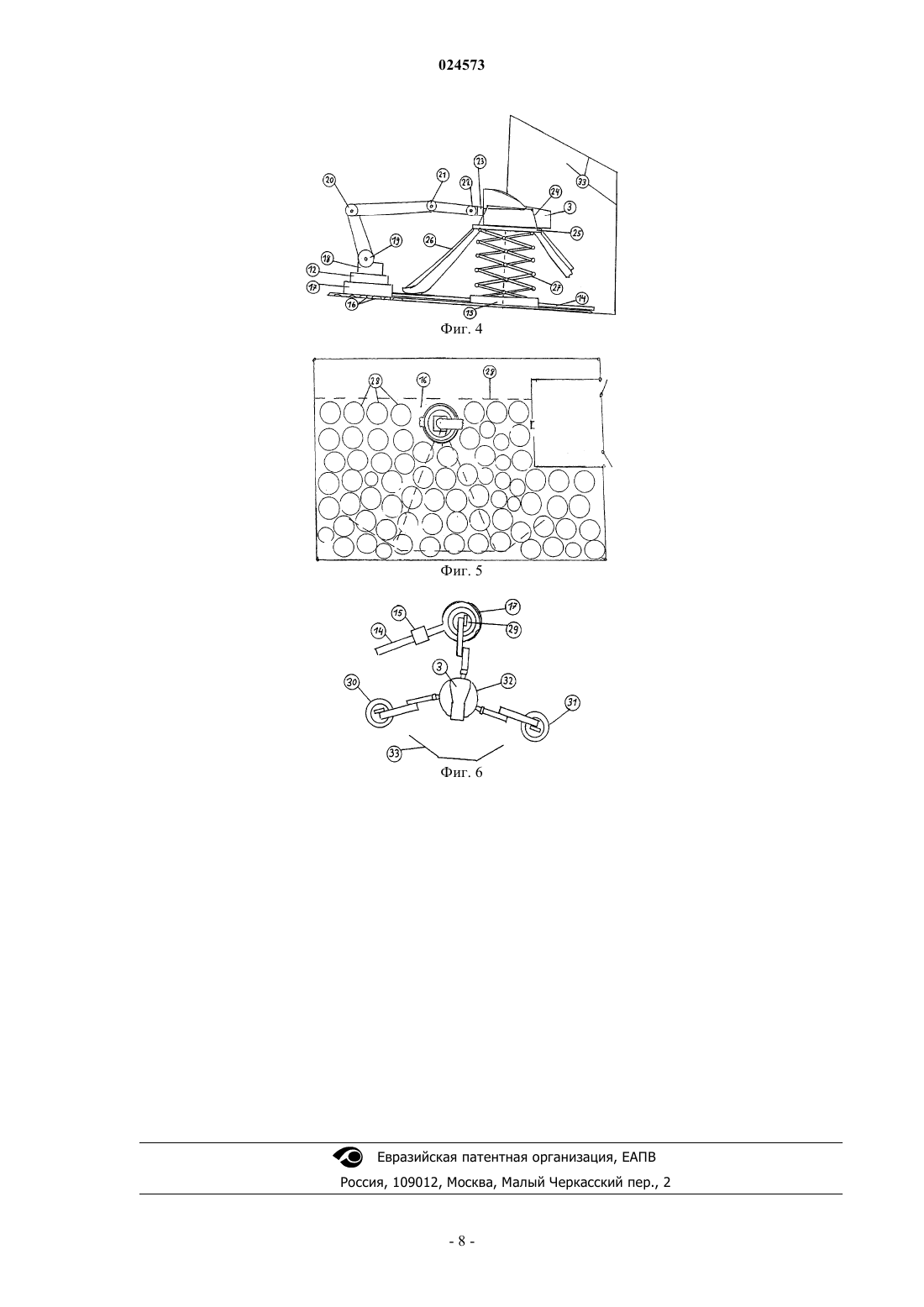
АВТОНОМНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДЛЯ ПОЛЬЗОВАТЕЛЕЙ СИМУЛЯТОРОВ ТРАНСПОРТНЫХ СРЕДСТВ Устройство и способ для безопасного использования симулятора транспортного средства,в частности летного тренажера, в виде кабины (3) симулятора, приводимой в действие посредством шестиосного робота, содержит а) зону доступа, которая открывается только для санкционированных пользователей и имеет набор защит, б) спасательный блок (13), который способен перемещаться по ходовому рельсу (14) в любое место рабочей зоны симулятора транспортного средства, при этом указанный спасательный блок имеет спасательную платформу(25), поручень (24) и спасательный наклонный лоток (26), в) амортизирующую поверхность,установленную по всей рабочей зоне, при этом указанная поверхность простирается по всей рабочей зоне кабины (3), и г) проекционную поверхность (33, 34), состоящую из набора плоскостей. Изобретение относится к устройству и к способу для управления системой обеспечения безопасности для пользователей симуляторов транспортных средств. Для сокращения процесса обучения, входящего в курс обучения пользования различными транспортными средствами, и для практического сведения к минимуму риска, как в начальной фазе такого процесса, так и при обучении в целом, в последнее время расширяют использование соответствующих симуляторов. С этой целью, например, в документе DE 102008 023955 B4 описан способ моделирования событий и действий, связанных с управлением летательными аппаратами, наземными транспортными средствами или судами и соответствующие симулирующие системы. Основной целью этого изобретения является заставить работать симулирующее устройство в режиме реального времени даже при том, что данные,необходимые для работы, поступают только из симулирующей программы, которая работает не в реальном времени, чтобы компенсировать задержку, обусловленную системой управления данными. В контексте настоящего изобретения термин "реальное время" означает время, фактически необходимое для протекания процессов в реальном мире. Термин "реальное время" не относится к конкретной скорости или вычислительной мощности программы или контроллера, а просто определяет период, в пределах которого система должна реагировать. Термин "задержка" относится к промежутку времени между действием и ожидаемой реакцией, то есть ко времени реакции. Существенным признаком, защищенном в этом документе, является то, что, если данные не прибывают вовремя, то разрыв в данных, который возникает, заполняют эмпирическими значениями или данными из предыдущих симулирующих программ, а затем эти данные посылают в контроллер движения симулятора, работающего в реальном времени [0046]. В указанном документе нет никаких указаний на работу системы обеспечения безопасности пользователя симулятора транспортного средства. Кроме того, в DE 60020466 T2 раскрыт "параллельный робот" с четырьмя степенями свободы, цель которого состоит в перемещении мобильной пластины с четырьмя степенями свободы с высокой скоростью и с высоким ускорением и определение местоположения этой мобильной пластины с высокой надежностью и точностью. Здесь термин "параллельный робот" относится к роботу, в котором множество приводов работают параллельно, в результате чего робот такого типа можно использовать, например, в симуляторе транспортного средства. В этой публикации описаны известные параллельные роботы с шестью степенями свободы, которые используются в летных тренажерах, раскрытых, например, в патентах США 5333514 и 5715729. Для достижения целей, сформулированных в патенте DE 60020466 T2, описан параллельный робот,который по существу имеет специальную конструкцию, содержащую параллельное соединение (3), подвижную платформу (4), связующие компоненты (42) и кинематические элементы (33). Указанный документ не имеет отношения к системам обеспечения безопасности для пользователей симуляторов транспортных средств. Поэтому основной задачей настоящего изобретения является создание устройства и способа, в которых первоочередная задача заключается не только в получении знаний по эксплуатации транспортных средств, но также и в обеспечении безопасности пользователя симулятора транспортного средства в случае технического повреждения или несчастного случая. Указанная цель достигнута в устройстве по п.1 формулы изобретения и в способе по п.7 формулы изобретения. Ниже более подробно описано устройство согласно изобретению. На фиг. 1 показан вид в перспективе симулятора транспортного средства,на фиг. 2 показан вид сверху устройства согласно изобретению,на фиг. 3 показан вид спереди системы обеспечения безопасности согласно изобретению,на фиг. 4 показан вид сбоку системы обеспечения безопасности согласно изобретению,на фиг. 5 показан вид сверху конструкции пола в системе обеспечения безопасности согласно изобретению,на фиг. 6 показана специфическая конструкция кабины грузового автомобиля. На фиг. 1 показан вид в перспективе симулятора транспортного средства в режиме ожидания. Кабина 3 транспортного средства имеет верхнюю часть 2 кабины, которая может быть открыта для посадки, и перемещается желаемым образом в трех измерениях посредством установленной на фланце роботизированной руки 1 в соответствии с командами стажера транспортного средства и определенными реакциями программы симулирования. В режиме простоя кабина 3 поддерживается демпфирующем слоем 4 в качестве верхней части посадочного устройства 5, при этом указанный слой имеет такую форму, которая согласована с контуром нижней стороны кабины. Соответствующие посадочные ступени 6, которые выполнены шире на самой последней ступени для удобства посадки, ведут до высоты посадочной зоны кабины 3 с обеих сторон. Все указанные ступени идут по обе стороны слоя 7 датчиков, который указывает на доступ к симулятору транспортного средства контроллеру всей системы, как только кто-нибудь вступает на посадочное устройство 5. В одном конкретном варианте выполнения настоящего изобретения в одной или большем количе-1 024573 стве ступеней имеются специальные датчики (не показаны), измеряющие вес или массу людей, поднимающихся на симулятор транспортного средства. Таким образом, контроллер всей системы получает дополнительную информацию для оценки силы, которая должна быть применена роботом для ускорения и перемещения кабины 3. Это повышает эксплуатационную безопасность симулятора транспортного средства, поскольку позволяет произвести реалистическую оценку пиковой нагрузки, обусловленной программой симулирования и действующей на человека и машину. Кроме того, для управляющей программы важно иметь информацию от множества датчиков на каждом месте и в каждом ремне безопасности в кабине 3: занято ли место и пристегнулся ли соответствующий пользователь. Процесс посадки и правильное закрытие кабины также должны контролироваться датчиками. На фиг. 2 показан вид сверху устройства согласно изобретению. Рабочая зона симулятора транспортного средства обозначена угловым сектором 8 и изображена штриховыми линиями. На виде сверху можно видеть роботизированную руку 1 и ее соединение с кабиной 3 транспортного средства в области посадочной ступени 6. На фиг. 2 основание используемого робота обозначено позицией 12. Опорно-поворотный круг 17 расположен концентрически вокруг основания 12 вместе с ходовым рельсом 14 спасательного блока 13, образуя продолжение роботизированной руки 1. Использование спасательного блока 13 иллюстрируется на виде сбоку на фиг. 4. На этом чертеже можно видеть, что защитный периметр 9, который прерывается только двумя входными дверями 10, идет вокруг всей зоны доступа и рабочей зоны. Контрольные датчики 11 установлены во всех углах защитного периметра 9. Эти контрольные датчики 11 могут быть оптическими датчиками, которые при взаимодействии с соответствующими светоизлучающими блоками выполняют функцию светового барьера для каждой контролируемой секции. При этом диапазон длин волн света может простираться от видимого света до инфракрасного света. В нижней части фиг. 2 в вертикальном сечении показаны проекционная поверхность А, обозначенная позицией 33, и проекционная поверхность В, обозначенная позицией 34. Здесь проекционная поверхность 34 представляет простейший случай проекционной стенки с единственным изгибом. Проекционная поверхность 33 выполнена как проекционная стенка с двумя изгибами. В обоих случаях верхняя поверхность, которая аналогично служит проекционной поверхностью, в таком ракурсе не видна. Основные замечания, относящиеся к способу проецирования в рамках используемого способа, даны в конце описания. На фиг. 3 показан вид спереди системы обеспечения безопасности согласно изобретению. В дополнение к изображенной роботизированной руке 1, кабине 3 транспортного средства, демпфирующему слою 4, посадочному устройству 5 и посадочным ступеням 6, показанным на виде спереди,в этом ракурсе видны левая входная дверь 10 и часть защитного периметра 9. Кроме того, виден один из контрольных датчиков 11, установленных в каждом углу. На фиг. 4 показан вид сбоку системы обеспечения безопасности согласно изобретению. В дополнение к основанию 12 робота и опорно-поворотному кругу 18 роботизированной руки 1, на этом чертеже дополнительно показаны первое поворотное соединение, обозначенное позицией 19, второе поворотное соединение, обозначенное позицией 20, третье поворотное соединение, обозначенное позицией 21, четвертое поворотное соединение, обозначенное позицией 22, и пятое поворотное соединение, обозначенное позицией 23, а также непосредственное соединение кабины 3. Опорно-поворотный круг 17 спасательного блока 13, который показан на виде сверху на фиг 2, установлен концентрически с опорно-поворотным кругом 18 роботизированной руки. Спасательный блок 13 базируется на тележке 15, которая может перемещаться к месту использования вдоль ходового рельса 14. Привод, необходимый для этого, не описан, чтобы не загромождать изложение. То же самое относится к опорно-поворотному кругу 17 спасательного блока 13. Кроме того, спасательный блок 13 содержит подъемный блок 27 для подъема спасательной платформы 25, которая для безопасности окружена поручнем 24. Спуск со спасательной платформы 25 может быть осуществлен снижением подъемного блока 27 или, в экстренных случаях, посредством спасательного наклонного лотка 26. На фиг. 4 на полу видны сформированные зоны, выполняющие функцию, которая обозначена как"оборудование для надувной подушки безопасности" (позиция 16). Это более подробно показано на фиг. 5. В правой части фиг. 4 проекционная поверхность 33 показана сбоку. Основные замечания, касающиеся используемого способа проецирования, можно найти в конце описания. На фиг. 5 показан вид сверху конструкции пола 16 в системе обеспечения безопасности согласно изобретению. Показанные круговые области представляют особые зоны 28 безопасности, например в пределах которых, когда имеется риск соударения с человеком или машиной, подушка безопасности может быть надута в каждой из указанных областей для смягчения соответствующего удара сверху, как в случае подушки безопасности в автомобиле. В каждом случае в качестве триггера для таких явлений используется датчик (не показан), который установлен в каждой из частичных круговых областей и который обнаруживает быстрое приближение падающей массы. Необходимое покрытие зависит от площади подушки безопасности в надутом состоянии и рабочей зоны роботизированной руки 1, которая должна и/или технически способна взаимодействовать с кабиной 3. На фиг. 6 показана специфическая конструкция кабины 3 грузового автомобиля. В этой конструкции роботизированная рука 1 заменена роботизированными руками в общей сложности трех роботов. Таким образом, нагрузка кабины транспортного средства распределена между этими тремя роботами 29,30 и 31, которые совместно поддерживают кабину транспортного средства 3 посредством платформы 32. В данном случае опорно-поворотный круг 17 спасательного блока 13 с ходовым рельсом 14 соответствующей длины и тележка 15 относятся к роботу 29. Вместо взаимодействия между тремя роботами в некоторых случаях может также быть достаточно взаимосвязи двух роботов. Акустическое обнаружение и оценка характеристических шумов машины могут использоваться в качестве специального варианта выполнения средства обеспечения защиты от повреждений компонентов машины, которые могут привести к непредвиденному отказу робота и, следовательно, к возникновению опасной ситуации для пользователей симулятора транспортного средства согласно изобретению. Спектр нормальных шумов, которые возникают во время работы промышленных роботов, регистрируется акустическими датчиками и используется в качестве эталона. Для этого подходят как бортовые шумовые сигналы, так и шумовые сигналы конструкции. Если во время работы такого робота шумы находятся вне ширины полосы нормальных частот и/или уровня помех, это обнаруживается электронной аналитической схемой и сообщается в контроллер всей системы. В зависимости от степени отклонения, обнаруженного таким образом, может быть необходимо выключить всю систему в следующий подходящий момент или выполнить соответствующую дополнительную проверку во время следующего технического обслуживания. В качестве еще одного варианта выполнения настоящего изобретения рассмотрим случай приводов с использованием ременных передач, в которых преждевременное разрушение можно обнаружить по акустическим сигналам лишь с большими трудностями и приходится использовать оптические датчики. С помощью таких датчиков можно обнаружить и зарегистрировать необычное качание или недопустимую вибрацию компонентов. Если имеют место необычные измеренные значения, следует применять те же критерии, что и в случае нарушений, обнаруженных по акустическим сигналам. Повреждение электрических деталей симулятора транспортного средства может также привести к нежелательным и, в частности, к непредвиденным отказам всей системы. Поскольку такое повреждение часто проявляется образованием дыма, в качестве специального варианта выполнения настоящего изобретения в соответствующих частях системы предусмотрены датчики для обнаружения образования значительного количества дыма. Кроме того, в случае возможного отказа электропитания предусмотрены запасные генераторные установки и/или буферные аккумуляторные батареи. Типичная рабочая последовательность действий описана ниже и включает 19 шагов: Шаги способа работы симулятора согласно изобретению с учетом световых индикаторов безопасности для пользователей 1. Режим ожидания: датчики, рабочая зона (вкл.) датчики, посадочная зона (вкл.) датчики, входные двери (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (красный) 2. Идентификация личности: датчики, рабочая зона (вкл.) датчики, посадочная зона (вкл.) датчики, входные двери (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (красный) 3. Стоянка, готовность к работе: датчики, входные двери (выкл.) датчики, посадочная зона (выкл.) датчики, рабочая зона (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (зеленый) 4. Доступ к посадке, открытие двери, закрытие двери: датчики, входные двери (выкл.) датчики, посадочная зона (выкл.) датчики, рабочая зона (вкл.) датчики, фонарь кабины (вкл.) датчики, фонарь кабины (выкл.) датчики, сидения (выкл.) световой индикатор (красный) 14. Отстегивание ремней безопасности, выход: датчики, входные двери (вкл.) датчики, посадочная зона (вкл.) датчики, рабочая зона, ограждение периметра (вкл.) датчики, фонарь кабины (выкл.) датчики, сидения (выкл.) световой индикатор (красный) 15. Закрытие фонаря кабины: датчики, входные двери (выкл.) датчики, посадочная зона (выкл.) датчики, рабочая зона, ограждение периметра (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (выкл.) световой индикатор (зеленый) 16. Выход через зону посадки, открытие двери, закрытие двери: датчики, входные двери (выкл.) датчики, посадочная зона (выкл.) датчики, рабочая зона, ограждение периметра (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (зеленый) 17. Покидание зоны посадки, закрытие двери: датчики, входные двери (вкл.) датчики, посадочная зона (вкл.) датчики, рабочая зона, ограждение периметра (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (красный) 18. Режим ожидания: датчики, входные двери (вкл.) датчики, посадочная зона (вкл.) датчики, рабочая зона, ограждение периметра (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (красный) 19. Выключение, заряд аккумуляторов аварийных систем: датчики, входные двери (вкл.) датчики, посадочная зона (вкл.) датчики, рабочая зона, ограждение периметра (вкл.) датчики, фонарь кабины (вкл.) датчики, сидения (вкл.) световой индикатор (красный). Одним из существенных компонентов симулятора транспортного средства является проекционная поверхность, которая моделирует для пользователя реальность, на которую он должен отреагировать своими действиями. В обычных способах проецирования часто используются искривленные проекционные поверхности, для которых требуются не только сложные контроллеры для соответствующих сегментов проецирования и дорогие проекторы, но которые также зависят от тяжелого и дорогостоящего удерживающего устройства, необходимого для такой искривленной поверхности в целом. Даже сама конструкция для удерживания большой площади такого типа уже представляет риск, так как часто приходится пренебрегать необходимой устойчивостью. Поэтому в автономной системе обеспечения безопасности согласно изобретению используется проекционная поверхность, которая состоит из плоской, но прочной и гибкой, легкой проекционной поверхности. В самом простом случае это могут быть две вертикальные проекционные поверхности, которые сходятся под соответствующим углом и которые накрыты другой поверхностью, как "крышкой", моделирующей небо. Примыкающие края соседних компонентов поверхности, образованные в этом случае, точно заданы и поэтому допускают относительно легкую регулировку с точки зрения программирования. Кроме того, освещаемые точки, представляющие эти примыкающие края, очень малы, и поэтому соответствующие переходные зоны не проявляются в полном изображении. Относительно легкое удерживающее устройство для проекционной поверхности подобного типа представляет собой дополнительный аспект безопасности. Управление сложными процессами движения и обработка сигналов используемых датчиков требует специальной управляющей программы. Список позиций на чертежах 1 - роботизированная рука; 2 - верхняя часть кабины; 3 - кабина; 4 - установочный слой для кабины; 5 - посадочное устройство; 6 - посадочные ступени; 7 - слой датчиков; 8 - рабочая зона симулятора транспортного средства; 9 - защитный периметр; 10 - входная дверь; 11 - датчик контроля; 12 - основание первого робота; 13 - спасательный блок; 14 - ходовой рельс спасательного блока; 15 - тележка спасательного блока; 16 - пол с оборудованием в виде подушек безопасности; 17 - опорно-поворотный круг для спасательного блока; 18 - опорно-поворотный круг для роботизированной руки; 19 - первое поворотное соединение для роботизированной руки; 20 - второе поворотное соединение для роботизированной руки; 21 - третье поворотное соединение для роботизированной руки; 22 - четвертое поворотное соединение для роботизированной руки; 23 - пятое поворотное соединение для роботизированной руки; 24 - поручень спасательной платформы; 25 - спасательная платформа; 26 - спасательный наклонный лоток; 27 - подъемный блок спасательной платформы; 28 - зона безопасности; 29 - первый робот; 30 - второй робот; 31 - третий робот; 32 - платформа; 33 - проекционная поверхность А; 34 - проекционная поверхность В. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для безопасного использования симулятора транспортного средства, в частности летного тренажера, в виде кабины (3) симулятора, приводимой в действие посредством шестиосного робота,содержащее: а) зону доступа, которая открывается только для санкционированных пользователей и имеет набор защит, при этом зона доступа образована по меньшей мере одной дверью, защищенной по меньшей мере одним датчиком (11) контроля, и каждая дверь ведет к посадочным ступеням (6), которые контролируются посредством слоя датчиков на предмет входа человека и/или веса входящего человека; б) спасательный блок (13), который способен перемещаться по ходовому рельсу (14) в любое место рабочей зоны симулятора транспортного средства, при этом указанный спасательный блок имеет спасательную платформу (25), поручень (24) и спасательный наклонный лоток (26); в) амортизирующую поверхность, установленную по всей рабочей зоне, при этом указанная поверхность простирается по всей рабочей зоне кабины (3); и г) проекционную поверхность (33, 34), состоящую из набора плоскостей. 2. Устройство по п.1, отличающееся тем, что кабина (3) закреплена на платформе (32), которая, в свою очередь, приводится в действие не только одним шестиосным роботом, а по меньшей мере двумя шестиосными роботами. 3. Устройство по п.1 или 2, отличающееся тем, что амортизирующая поверхность, установленная в зоне безопасности, состоит из покрытия, образованного множеством устройств, аналогичных надувной подушке безопасности. 4. Устройство по любому из пп.1-3, отличающееся тем, что приближающиеся отказы компонентов робота обнаруживаются посредством акустического и/или оптического средства, а отказы электрических систем обнаруживаются с помощью средства обнаружения дыма, при этом указанные отказы учитываются при программировании. 5. Устройство по одному из предыдущих пунктов, отличающееся тем, что в случае заранее заданной индикации отказа или наличия постороннего объекта включается сигнал тревоги. 6. Способ безопасного использования симулятора транспортного средства, в частности летного тренажера, в виде кабины (3) симулятора, приводимой в действие посредством шестиосного робота,включающий использование устройства по п.1. 7. Способ по п.6, отличающийся тем, что кабину (3) приводят в действие не только одним шестиосным роботом, а по меньшей мере двумя шестиосными роботами. 8. Способ по п.6 или 7, отличающийся тем, что амортизирующая поверхность, установленная в зоне безопасности, образована покрытием, состоящим из множества устройств, аналогичных надувной подушке безопасности. 9. Способ по п.7 или 8, отличающийся тем, что приближающиеся отказы компонентов робота обнаруживают посредством акустического и/или оптического средства, а отказы электрических систем обнаруживают с помощью средства обнаружения дыма, при этом указанные отказы учитывают при программировании. 10. Способ по любому из пп.6-9, отличающийся тем, что в случае заранее заданной индикации отказа или наличия постороннего объекта включают сигнал тревоги.
МПК / Метки
МПК: A62B 1/02, A63G 31/16, E06C 1/52, G09B 9/08
Метки: безопасности, средств, симуляторов, обеспечения, система, пользователей, транспортных, автономная
Код ссылки
<a href="https://eas.patents.su/9-24573-avtonomnaya-sistema-obespecheniya-bezopasnosti-dlya-polzovatelejj-simulyatorov-transportnyh-sredstv.html" rel="bookmark" title="База патентов Евразийского Союза">Автономная система обеспечения безопасности для пользователей симуляторов транспортных средств</a>
Система безопасности для транспортных средств
Номер патента: 14575
Опубликовано: 30.12.2010
Автор: Хорват Имре
МПК: B60S 9/02
Метки: безопасности, средств, система, транспортных
Формула / Реферат:
1. Система безопасности для транспортных средств, позволяющая в случае опрокидывания или наклона транспортного средства поднимать его и возвращать в исходное положение,отличающаяся тем, что она содержитблок датчиков, контролирующий положение транспортного средства, подъемный блок (2), управляемый блоком датчиков, подъемную конструкцию (3), установленную в подъемном блоке (2),при этом подъемный блок (2), включающий подъемную конструкцию (3),...
Система обеспечения безопасности
Номер патента: 9224
Опубликовано: 28.12.2007
Автор: Линев Владимир Николаевич
МПК: G08B 21/22, G08B 13/181, G01N 23/083...
Метки: обеспечения, система, безопасности
Формула / Реферат:
1. Система для предотвращения проникновения запрещенных предметов и/или веществ из окружающей территории на охраняемую территорию, содержащая перегородку, выделяющую охраняемую территорию из окружающей, хотя бы один проход в указанной перегородке, устройство управления и обработки информации, и детектор запрещенных предметов и/или веществ, содержащий приемник, связанный с устройством управления и обработки информации, отличающаяся тем, что...
Устройство, система и способ обеспечения безопасности летательного аппарата

Номер патента: 9112
Опубликовано: 26.10.2007
Автор: Арнуз Майкл
МПК: G08B 29/00
Метки: безопасности, обеспечения, летательного, устройство, аппарата, способ, система
Формула / Реферат:
1. Механизм обеспечения безопасности для идентификации уполномоченных пользователей, включающий орган управления, управляемый пользователем; одно или более устройство обеспечения безопасности для идентификации пользователя, пытающегося управлять органом управления; и одно или более устройство контроля для определения, уполномочен ли идентифицированный пользователь управлять органом управления, при этом указанные устройства контроля заранее...
Транспортная сеть, содержащая флот транспортных средств, судно и станцию заправки сжатым воздухом для обеспечения этой сети
Номер патента: 3120
Опубликовано: 27.02.2003
Авторы: Негре Сирил, Негре Ги
МПК: B63H 19/02, F03B 13/26
Метки: этой, воздухом, содержащая, сети, флот, сжатым, транспортных, станцию, средств, заправки, сеть, транспортная, обеспечения, судно
Формула / Реферат:
1. Транспортная сеть, содержащая флот самодвижущихся транспортных средств (14, 24), на каждом из которых для привода его в движение используется установленный на борту автономный источник сжатого газа, в частности сжатого воздуха, и, по меньшей мере, одну заправочную станцию (16) сжатого газа, отличающаяся тем, что станция (16) установлена вблизи от естественного или искусственного потока (12) воды и содержит турбину (30), приводимую в движение...
Система и способ обеспечения безопасности летательного аппарата и предотвращения его захвата
Номер патента: 9538
Опубликовано: 28.02.2008
Автор: Арнуз Майкл
МПК: G06K 9/00
Метки: способ, захвата, система, обеспечения, аппарата, безопасности, летательного, предотвращения
Формула / Реферат:
1. Способ управления летательным аппаратом, включающий ввод информации о плане полета в систему контроля; вычисление допусков отклонения, относящихся к плану полета; управление летательным аппаратом согласно плану полета; отклонение от плана полета в случае необходимости изменения плана полета, при этом в случае отклонения от плана полета оценивают, имеет ли место возможная враждебная ситуация, путем определения, находится ли отклонение от плана...
Предыдущий патент: Противоточное шахтное осушительное устройство полочного типа с перемещаемыми полками для высушивания агломератов с небольшой механической прочностью
Следующий патент: Композиции, включающие поверхностно-активный продукт на основе жирного ацилизетионата, алканоилсодержащие соединения и триглицериды с низкой степенью гидрирования
Случайный патент: Механизм перемещения стержней оградительной решетки