Детектирование кавитации
Формула / Реферат
1. Система для детектирования кавитации при эксплуатации гидравлического механизма, содержащая
акустический датчик (102, 602, 701);
высокочастотный фильтр (302), имеющий частоту отсечки, больше или равную 1 МГц, и пропускающий частоты до 5 МГц для фильтрации сигнала от акустического датчика (102);
первый детектор (303) для подачи сигнала, характеризующего энергию в сигнале от акустического датчика, отфильтрованном по высокой частоте;
контрольный приемник (305) для приема контрольного сигнала от источника контрольного сигнала;
компаратор (304) для сравнения сигнала от первого детектора (303) с контрольным сигналом и выдачи выходного сигнала, если сигнал от первого детектора превышает контрольный сигнал.
2. Система по п.1, содержащая усилитель (301) для усиления сигнала от акустического датчика (102).
3. Система по любому предшествующему пункту, отличающаяся тем, что высокочастотный фильтр (302) является частью полосового фильтра (502), содержащего низкочастотный фильтр.
4. Система по п.3, отличающаяся тем, что низкочастотный фильтр имеет верхнюю частотную характеристику акустического датчика.
5. Система по любому предшествующему пункту, содержащая
низкочастотный фильтр (502) для фильтрации сигнала от акустического датчика (102);
второй детектор (503) для подачи сигнала, указывающего энергию в сигнале от акустического датчика, отфильтрованном по низкой частоте, и являющегося источником контрольного сигнала,
отличающаяся тем, что контрольный приемник (305) предназначен для приема сигнала от второго детектора (503) в качестве контрольного сигнала.
6. Система по п.5, отличающаяся тем, что низкочастотный фильтр (502) имеет частоту отсечки по меньшей мере одного значения из 1, 10, 100 кГц и 1 МГц.
7. Система по любому предшествующему пункту, содержащая контроллер (306), используемый для управления рабочим состоянием гидравлического механизма (100, 700), чтобы уменьшить кавитацию в том случае, если компаратор (304) укажет, что сигнал от первого детектора (303) превышает контрольный сигнал.
8. Система по любому предшествующему пункту, отличающаяся тем, что контроллер содержит контроллер (306) двигателя, выполненный с возможностью уменьшения частоты вращения двигателя (110) в том случае, если сигнал от первого детектора (303) превышает контрольный сигнал.
9. Система по п.8, содержащая двигатель (110).
10. Система по п.9, содержащая насос (100, 700), подсоединенный к двигателю (110), и отличающаяся тем, что акустический датчик (102, 602, 701) расположен относительно насоса так, чтобы отслеживать кавитацию в насосе (100).
11. Система по любому предшествующему пункту, отличающаяся тем, что акустический датчик (102) содержит прокладку (102) из пьезоэлектрического материала.
12. Система по п.11, отличающаяся тем, что пьезоэлектрический материал содержит полимерный пьезоэлектрический материал.
13. Система по п.12, отличающаяся тем, что прокладка содержит ПВДФ.
14. Система по любому одному из пп.11-13, отличающаяся тем, что прокладка расположена на входе (101) насоса (100).
15. Система по любому одному из пп.1-10, отличающаяся тем, что акустический датчик (102) имеет резиновый акустический соединитель (601), один или больше полимерных пьезоэлектрических слоев (602а, 602b, 602с) и захватную часть (603).
16. Система по п.15, отличающаяся тем, что резиновый акустический соединитель (601) содержит резину, имеющую твердость по Шору в диапазоне от 10 до 20.
17. Система по любому одному из пп.1-10, отличающаяся тем, что акустический датчик (701) расположен в выемке (702) на корпусе (703) насоса (700).
18. Способ детектирования кавитации в гидравлической машине, включающий следующие этапы:
прием сигнала от акустического датчика (303), который акустически связан с гидравлической машиной;
высокочастотная фильтрация сигнала от акустического датчика (303) с помощью высокочастотного фильтра (302), имеющего частоту отсечки, больше или равную 1 МГц, и пропускающего частоты до 5 МГц;
подача сигнала, указывающего на энергию в сигнале от акустического датчика, отфильтрованном по высокой частоте;
сравнение сигнала, указывающего на энергию, с контрольным сигналом, полученным от источника контрольного сигнала, и выдача выходного сигнала, если сигнал, указывающий на энергию, превышает контрольный сигнал.

Текст
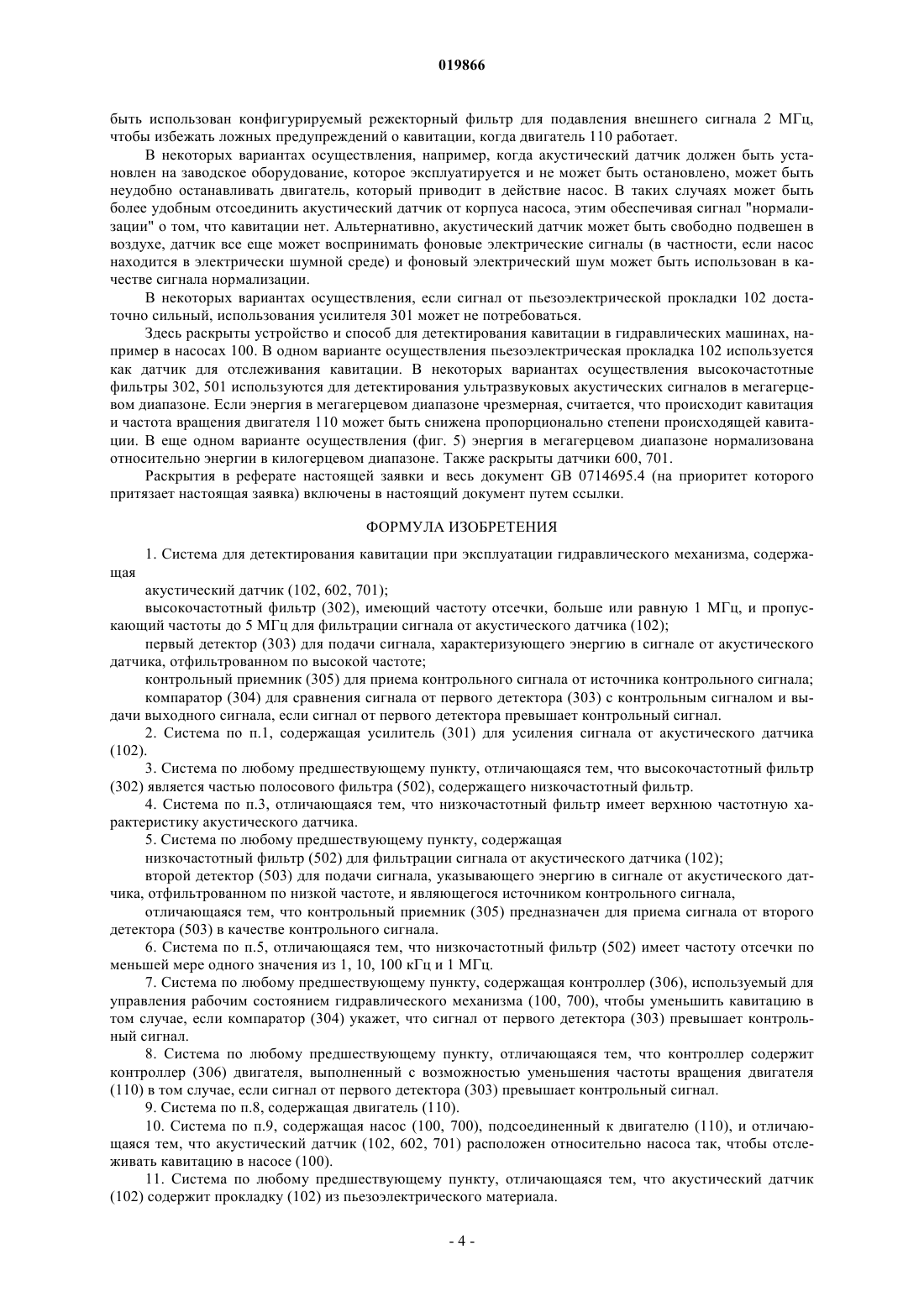
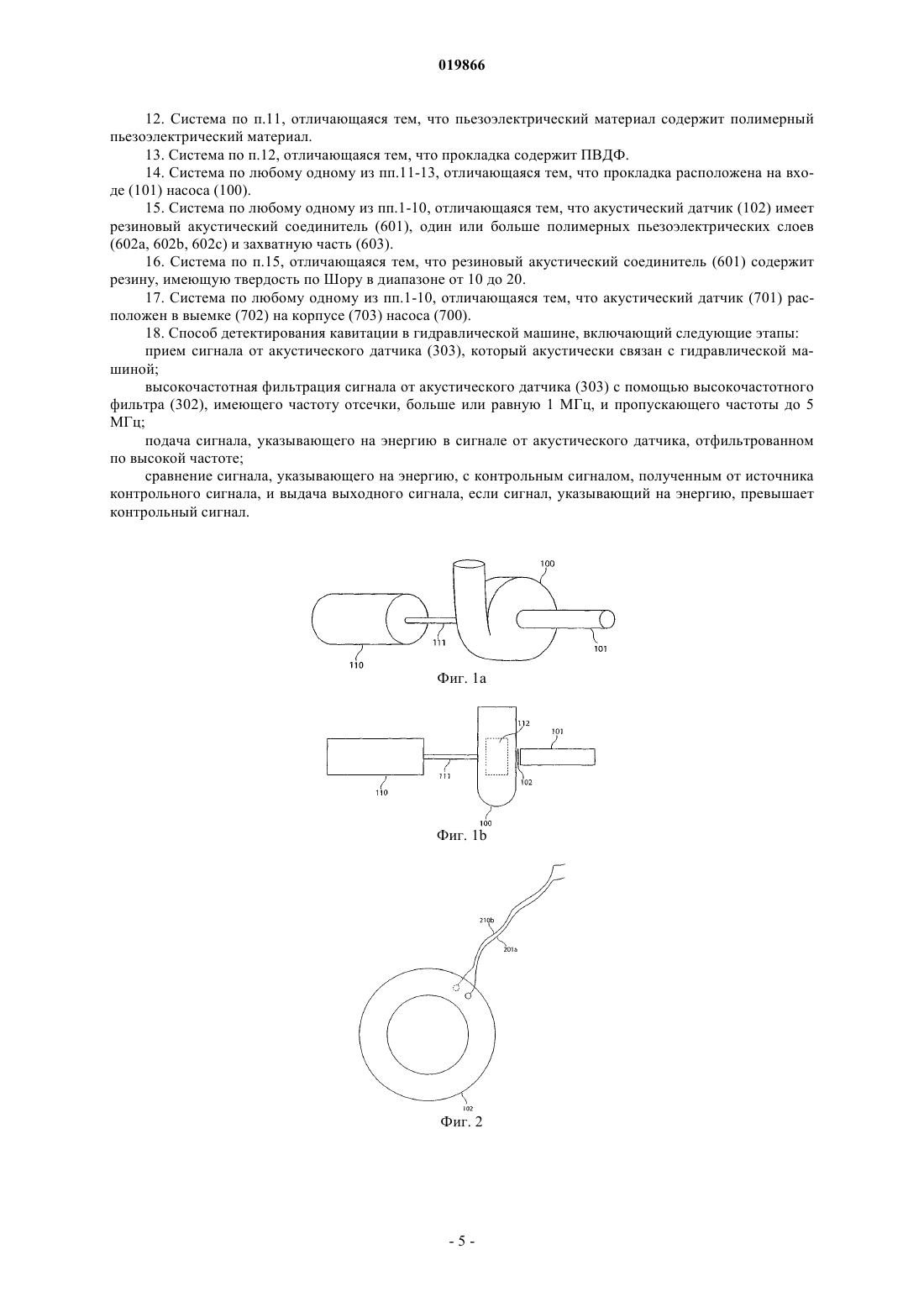
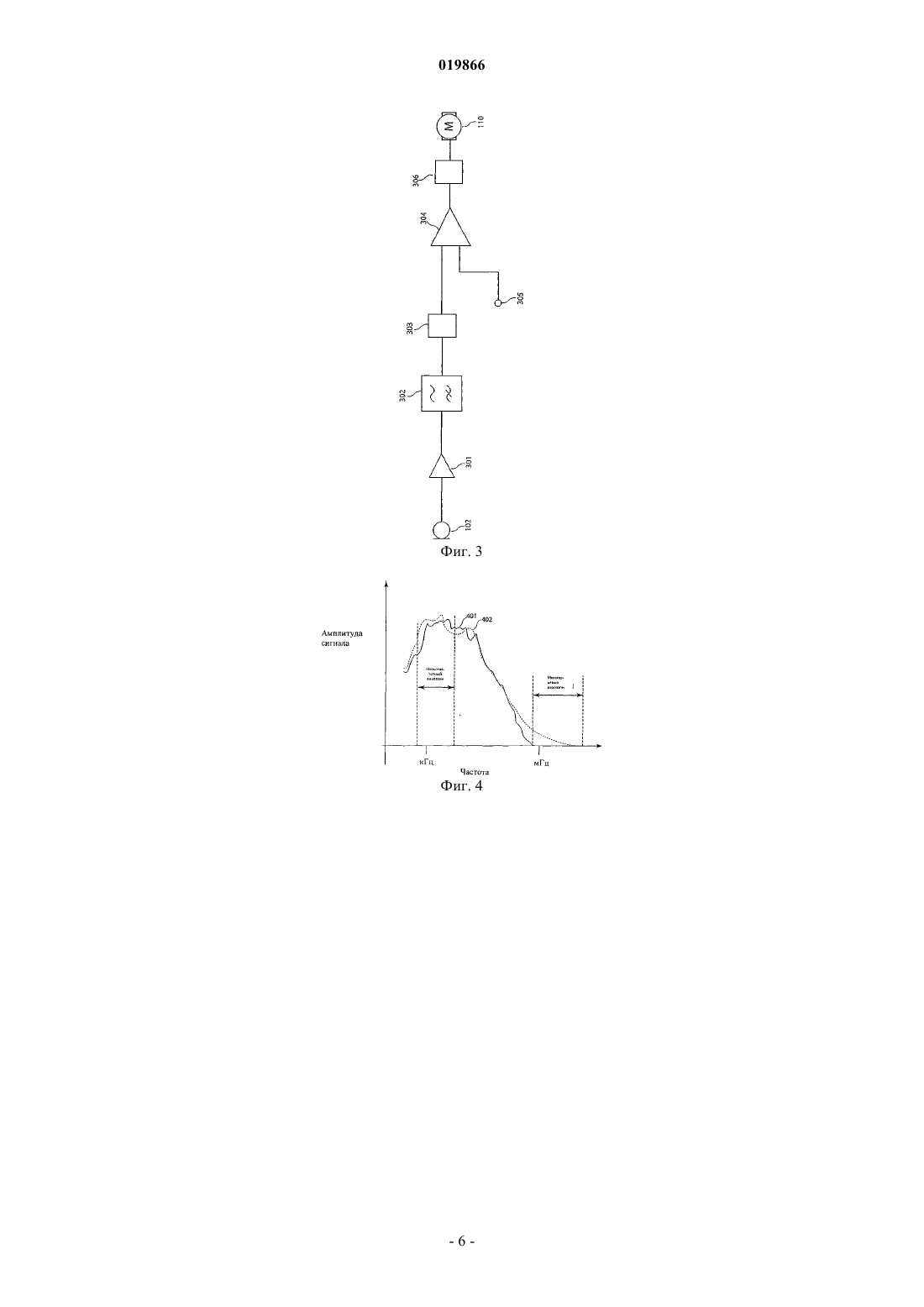
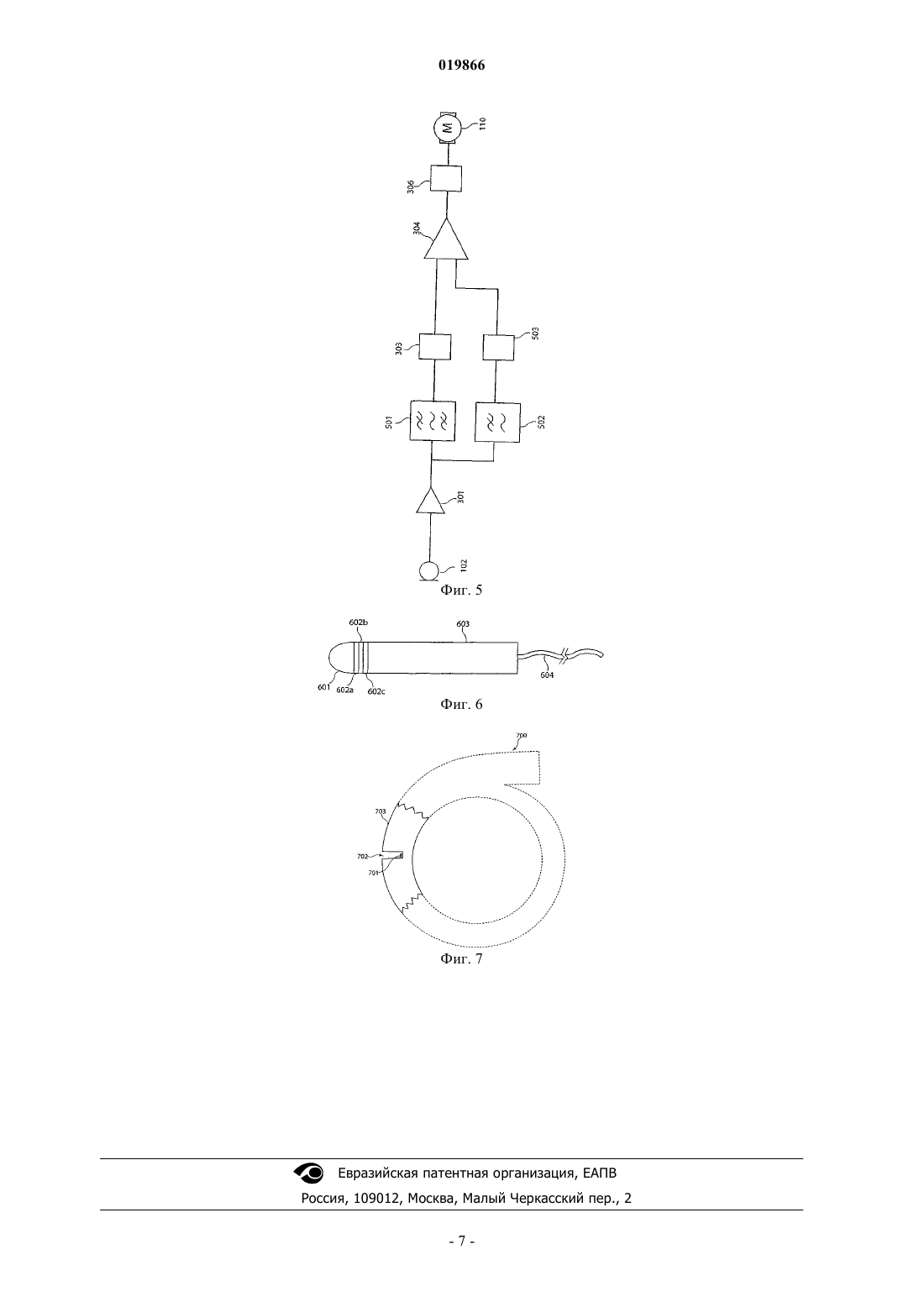
В изобретении раскрыты устройство и способ для детектирования кавитации в гидравлических машинах, например в насосах (100). В одном варианте осуществления пьезоэлектрическая прокладка (102) используется в качестве датчика, отслеживающего кавитацию. В некоторых вариантах осуществления высокочастотные фильтры (302), (501) используются для детектирования ультразвуковых акустических сигналов в мегагерцевом диапазоне. Если энергия в мегагерцевом диапазоне чрезмерная, считается, что происходит кавитация и частота вращения двигателя (110) может быть уменьшена пропорционально степени кавитации. В другом варианте осуществления(фиг. 5) энергия в мегагерцевом диапазоне нормализована относительно энергии в килогерцевом диапазоне. Также раскрыты датчики (600, 701).(71)(73) Заявитель и патентовладелец: ВЕ СЕКРЕТАРИ ОФ СТЭЙТ ФОР ТРЭЙД ЭНД ИНДАСТРИ (GB) Настоящее изобретение относится к детектированию кавитации в гидравлических механизмах. В частности, настоящее изобретение относится к детектированию кавитации в насосах для перекачки жидкости (например, сверхкритической жидкости). Кавитацией является проблематичное явление, которое может произойти, когда насос эксплуатируют так, что давление в насосе падает ниже давления паров перекачиваемой жидкости. Образуются пузыри испаряющейся жидкости. При разрушении пузырей насос может быть поврежден. При большой кавитации шум разрушающихся пузырей может быть слышен человеку. Однако было бы лучше детектировать начало сильной и/или повреждающей кавитации и изменить условия эксплуатации насоса (в некоторых условиях небольшая кавитация допустима). В документе JP 11-037979 раскрыта система для детектирования кавитации в гидравлических механизмах, таких как насосы. Система в документе JP 11-037979 работает, сравнивая циклы форм последовательных акустических волн от насоса. Каждый цикл формы волны разлагается на несколько коэффициентов. Коэффициенты циклов форм последовательных акустических волн сравнивают почленно, беря целочисленное произведение форм последовательных акустических волн. Если циклы форм последовательных акустических волн достаточно сходны, то считается, что кавитация не происходит; если циклы достаточно разнятся, то считается, что происходит кавитация. Согласно одному аспекту настоящего изобретения предлагаются датчик-преобразователь, фильтр верхних частот для высокочастотной фильтрации сигнала от датчика, контрольный приемник для приема порогового значения, компаратор для сравнения отфильтрованного сигнала с пороговым значением. Согласно другим аспектам изобретения предложены акустические датчики и способ детектирования кавитации. Одно преимущество настоящего изобретения заключается в том, что требуется меньшая обработка сигнала по сравнению с некоторыми способами детектирования кавитации, известными из уровня техники. Другое преимущество некоторых вариантов осуществления настоящего изобретения заключается в том, что они детектируют кавитацию в мегагерцевом диапазоне, что позволяет более надежно выявлять кавитацию (или начало бурной кавитации). В одном варианте осуществления настоящего изобретения сигнал от датчика сравнивается с сигналом от датчика, отфильтрованном по нижним частотам. Преимуществом этого варианта осуществления является то, что он менее зависим от уровня сигнала от датчика и, таким образом, этот вариант осуществления более невосприимчив к неопределенностям в акустической связи датчика с контролируемым насосом. Описание чертежей На фиг. 1 а показан перспективный вид насоса и двигателя; на фиг. 1b показан вид насоса и двигателя, который позволяет видеть пьезоэлектрическую прокладку; на фиг. 2 показан вид пьезоэлектрической прокладки с фиг. 1b; на фиг. 3 показано схематическое изображение системы, которая может быть использована для детектирования начала кавитации и которая снижает частоту вращения двигателя, если выявлена кавитация; на фиг. 4 показан пример форм акустических волн от насоса: (i) когда насос работает без кавитации и (ii) во время начала кавитации; на фиг. 5 показано схематическое изображение системы на основе системы, показанной на фиг. 3,но которая сравнивает по-разному отфильтрованные варианты сигнала от датчика; на фиг. 6 показан перспективный вид датчика, который может быть прижат к корпусу насоса, чтобы измерять акустический сигнал от насоса; на фиг. 7 показан вид в разрезе части насоса, в которую введен акустический датчик. Описание предпочтительных вариантов осуществления На фиг. 1 а и 1b показан насос 100, соединенный с входным патрубком 101 через пьезоэлектрическую прокладку 102. Двигатель 110 имеет вал 110, который вращает рабочее колесо 112 насоса 100. На фиг. 2 показан более детальный вид пьезоэлектрической прокладки 102. В этом варианте осуществления пьезоэлектрическая прокладка 102 круглая и имеет две плоские поверхности. Одна из поверхностей используется для образования гидравлического уплотнения на насосе 100; другая поверхность используется для образования гидравлического уплотнения на входном патрубке 101. В этом варианте осуществления пьезоэлектрическая прокладка 102 выполнена из полимерного пьезоэлектрического материала, например ПВДФ (поливинилиденфторида), имеющего толщину 50 мкм. Провода 201 а, 201b подсоединены к соответствующим поверхностям прокладки 102. Пьезоэлектрическая прокладка 102 может быть изготовлена из одного слоя пленки, последовательности ламинированных слоев или может представлять структурированный или имеющий определенную форму электрод. Когда пьезоэлектрическая прокладка 102 зажата между насосом 100 и входным патрубком 101, пьезоэлектрическая прокладка преобразует акустические сигналы от насоса в электрические сигналы. Пьезоэлектрическая прокладка 102 поэтому может быть использована для детектирования акустических сигналов от насоса 100. В других вариантах осуществления вокруг прокладки 102 и/или проводов 201 а, 201b может быть предусмотрен электростатический экран для уменьшения влияния внешних электрических сигналов. В других вариантах осуществления вместо полимерного пьезоэлектрического материала может быть использован керамический пьезоэлектрический материал или смешанный полимерно-керамический композитный материал. Если используется керамический пьезоэлектрический материал, может потребоваться покрыть керамику полимером, таким как резина, для предотвращения растрескивания керамики,когда керамический пьезоэлектрический материал зажимают между насосом 100 и входным патрубком 101. Преимущество использования полимерного пьезоэлектрического материала заключается в том, что толщину полимера можно уменьшить легче, чем толщину керамического пьезоэлектрического материала. Относительно тонкий материал, в общем, будет лучше, чем более толстый материал при детектировании высокочастотных акустических сигналов из-за того, что тонкий материал небольшой по сравнению с длиной волны высокочастотного акустического сигнала. Например, слой ПВДФ толщиной 50 мкм имеет верхнюю частотную характеристику приблизительно 20 МГц и поэтому не может быть эффективно использован для отслеживания акустических сигналов, имеющих частоту выше приблизительно 20 МГц. При частотах ниже 20 МГц толщина слоя ПВДФ 50 мкм значительно меньше, чем длина волны звука, например, в воде. Кроме того, более тонкий материал будет иметь более высокую резонансную частоту (первый резонанс происходит, когда толщина материала становится равной половине длины акустической волны), что позволяет детектировать сигналы с более высокими частотами. На фиг. 3 показано схематическое изображение системы, которая может быть использована для детектирования начала кавитации и уменьшения частоты вращения двигателя после детектирования кавитации. На фиг. 3 показано, что электрический сигнал от пьезоэлектрической прокладки 102 усиливается усилителем 301 и затем отфильтровывается высокочастотным фильтром 302. (В альтернативных вариантах осуществления может быть предпочтительнее фильтровать и затем усиливать сигнал от пьезоэлектрической прокладки 102.) В этом варианте осуществления высокочастотный фильтр 302 ослабляет сигналы, имеющие частоту меньше 1 МГц. В этом варианте осуществления высокочастотный фильтр 302 является аналоговым фильтром второго порядка (т.е. ослабление повышается при 12 дБ на октаву), хотя в альтернативных вариантах осуществления может быть использован цифровой фильтр. Выход высокочастотного фильтра 302 соединен с детектором 303. В этом варианте осуществления детектор 303 является детектором огибающей и преобразует сигнал от высокочастотного фильтра 302 в напряжение, показывающее силу сигнала от высокочастотного фильтра 302. В других вариантах осуществления детектор 303 может содержать датчик амплитуды или среднеквадратичный детектор. Выход детектора 303 соединен с компаратором 304. Компаратор 304 сравнивает напряжение от детектора 303 с контрольным сигналом, полученным с контрольного входа 305. В этом варианте осуществления компаратор 304 вычитает контрольный сигнал из детектированного напряжения. В других вариантах осуществления компаратор 304 может делить детектированное напряжение на контрольный сигнал для получения отношения. В этом варианте осуществления выход компаратора 304 соединен с контроллером 306 двигателя,который управляет частотой вращения двигателя 110. В том случае, если компаратор 304 покажет чрезмерную кавитацию, контроллер 305 двигателя уменьшит частоту вращения двигателя 110, чтобы уменьшить кавитацию. В других вариантах осуществления для уменьшения кавитации могут быть использованы другие способы. Например, может быть повышено давление на входе в насос 100. На фиг. 4 показан пример форм акустических волн от насоса 100 и амплитуда форм акустических волн против частоты. Кривая 401 (сплошная линия) показывает амплитуду формы акустической волны против частоты, когда насос работает без существенной кавитации. Кривая 402 (пунктирная линия) показывает амплитуду форм акустических волн против частоты при начале бурной кавитации. Как можно видеть на фиг. 4, во время кавитации амплитуда формы акустической волны немного увеличивается на килогерцовых частотах и значительно увеличивается на мегагерцовых частотах. Детекторы кавитации, известные из уровня техники, обычно детектируют кавитацию на килогерцовых частотах с интервалом 100 кГц. Варианты осуществления настоящего изобретения могут детектировать кавитацию на частоте по меньшей мере 0,5 МГц, по меньшей мере 1 МГц, по меньшей мере 2 МГц, по меньшей мере 4 МГц или по меньшей мере 8 МГц, путем соответствующего изменения частоты отсечки высокочастотного фильтра 302. На фиг. 5 показано схематическое изображение системы, которая основана на системе, показанной на фиг. 3, но которая сравнивает по-разному отфильтрованные варианты сигнала от пьезоэлектрической прокладки 102. На фиг. 5 показано, что выходной сигнал усилителя 301 фильтруется полосовым фильтром 501(вместо высокочастотного фильтра 302). В этом варианте осуществления полосовой фильтр 501 ослабляет частоты, которые лежат за пределами полосы частот от 1 до 5 МГц. Выходной сигнал усилителя 301 также фильтруется низкочастотным фильтром 502, детектируется детектором 503 и используется в качестве контрольного входного сигнала в компараторе 304. В этом варианте осуществления низкочастотный фильтр 502 имеет частоту отсечки 1 кГц и ослабляет частоты выше 1 кГц. В альтернативных вариантах осуществления частота отсечки низкочастотного фильтра 502 может составлять 10, 100 кГц или 1 МГц. Специалисты в данной области техники смогут понять, что полосовой фильтр 501 может концепту-2 019866 ально рассматриваться как высокочастотный фильтр на 1 МГц, последовательно соединенный с низкочастотным фильтром на 5 МГц (даже если полосовой фильтр 501 может быть фактически реализован как один полосовой фильтр, а не как соединенные высокочастотный и низкочастотный фильтры). Так, фиг. 5 включает функцию высокочастотного фильтра, которая эквивалентна функции высокочастотного фильтра 302 с фиг. 3. В некоторых вариантах осуществления верхняя частотная характеристика пьезоэлектрической прокладки 102 может использоваться для определения низкочастотного фильтра полосового фильтра 501. Система, показанная на фиг. 5, сравнивает акустическую энергию, исходящую от насоса 100 в частотном диапазоне от 1 до 5 МГц с акустической энергией ниже 1 кГц. Если существует избыток энергии в диапазоне от 1 до 5 МГц, то насос 100 считается имеющим чрезмерную кавитацию и контроллер 305 двигателя используется для уменьшения частоты вращения двигателя 110 (и соответственно насоса 100). Преимущество системы, показанной на фиг. 5, в сравнении с системой, показанной на фиг. 3, заключается в том, что система на фиг. 5 более невосприимчива к несовершенной акустической связи между пьезоэлектрической прокладкой 102 и насосом 100 и также более невосприимчива к несовершенной связи изза расстояния, которое должен пройти ультразвук от кавитирующей поверхности внутри насоса 100 до корпуса насоса 100. Система, показанная на фиг. 3, не может учитывать плохую акустическую связь(плохая акустическая связь может по ошибке привести к показанию, что кавитации нет). Напротив, система, показанная на фиг. 5, нормализует энергию в частотном диапазоне от 1 до 5 МГц относительно энергии в частотном диапазоне ниже 1 кГц. Таким образом, если пьезоэлектрическая прокладка 102 недостаточно хорошо связана с насосом 100, сигнал в частотном диапазоне от 1 до 5 МГц и сигнал в частотном диапазоне ниже 1 кГц будут ослаблены. Так, система, показанная на фиг. 5, может, по меньшей мере, частично компенсировать несовершенную акустическую связь. На фиг. 6 показан перспективный вид датчика 600, который может быть прижат к корпусу насоса, чтобы измерять акустический сигнал от насоса. Датчик 600 может быть использован во время сдачи насоса в эксплуатацию для определения условий эксплуатации насоса, которые не приводят к чрезмерной кавитации. После определения условий эксплуатации датчик 600 может быть более легко удален из насоса чем, например, пьезоэлектрическая прокладка 102. С другой стороны, преимущество пьезоэлектрической прокладки 102 заключается в том,что с ней можно постоянно контролировать насос 100 в реальном времени. Как показано, датчик 600 содержит акустический соединитель 601, который может быть прижат к корпусу насоса. В этом варианте осуществления акустический соединитель 601 выполнен из резины и подводит акустическую энергию к трем слоям ПВДФ 602 а, 602b, 602 с. В этом варианте осуществления каждый из трех слоев ПВДФ 602 в сущности плоский. Использование трех слоев ПВДФ повышает напряжение выходного сигнала датчика 600 на коэффициент приблизительно три, а также снижает верхний частотный предел датчика 600 (по сравнению с использованием одного слоя ПВДФ; снижение верхнего частотного предела происходит из-за увеличенной толщины трех слоев ПВДФ по сравнению с одним слоем). В этом варианте осуществления твердость по Шору эластомерного соединителя 601 предпочтительно находится в диапазоне от 10 до 20, хотя в других вариантах осуществления твердость по Шору может быть меньше 10 или больше 20. Датчик 600 в этом варианте осуществления также имеет металлический хвостовик 603, который действует как захватная часть, позволяющая пользователю удерживать акустический соединитель 601 датчика 600 на наружной поверхности насоса или труб, подсоединенный к насосу. Провод 604 используется для соединения датчика 600 со схемой (не показана). В альтернативных вариантах осуществления акустический датчик (не показан) может быть прикреплен или приклеен (например, с использованием клея) к наружной поверхности насоса. В таких вариантах осуществления акустический соединитель 601 и/или металлический хвостовик 603 могут не потребоваться. На фиг. 7 показан вид в разрезе части насоса 700 (большая часть насоса 700 показана пунктирными линиями), в которую введен акустический датчик 701. Акустический датчик 701 введен в выемку 702 в корпусе 703 насоса 700. Преимущество этого варианта осуществления заключается в том, что акустический датчик 701 расположен близко к жидкости, в которой может произойти кавитация. Напротив, вариант осуществления на фиг. 1 требует акустического сигнала для перехода от внутренней поверхности насоса 100 к пьезоэлектрической прокладке 102. Специалистам в данной области техники будет понятно, что настоящее изобретение можно использовать для уменьшения кавитации в насосах, например центробежных или осевых, или в гидравлических механизмах. В некоторых ситуациях может быть выгодным снизить влияние электрического шума. Электрический сигнал от акустического датчика обычно требует значительного усиления, и существует риск ненамеренного приема блуждающих электрических сигналов. Хотя вышеупомянутый в связи с фиг. 2 электростатический экран может быть достаточным, в других вариантах осуществления может быть выполнен этап калибровки. В таких вариантах осуществления акустический сигнал измеряют в условиях, при которых известно, что кавитации не происходит (например, когда двигатель 110 не работает). Если сигнал, например, имеющий частоту 2 МГц, детектируется в состоянии отсутствия кавитации, то может быть использован конфигурируемый режекторный фильтр для подавления внешнего сигнала 2 МГц,чтобы избежать ложных предупреждений о кавитации, когда двигатель 110 работает. В некоторых вариантах осуществления, например, когда акустический датчик должен быть установлен на заводское оборудование, которое эксплуатируется и не может быть остановлено, может быть неудобно останавливать двигатель, который приводит в действие насос. В таких случаях может быть более удобным отсоединить акустический датчик от корпуса насоса, этим обеспечивая сигнал "нормализации" о том, что кавитации нет. Альтернативно, акустический датчик может быть свободно подвешен в воздухе, датчик все еще может воспринимать фоновые электрические сигналы (в частности, если насос находится в электрически шумной среде) и фоновый электрический шум может быть использован в качестве сигнала нормализации. В некоторых вариантах осуществления, если сигнал от пьезоэлектрической прокладки 102 достаточно сильный, использования усилителя 301 может не потребоваться. Здесь раскрыты устройство и способ для детектирования кавитации в гидравлических машинах, например в насосах 100. В одном варианте осуществления пьезоэлектрическая прокладка 102 используется как датчик для отслеживания кавитации. В некоторых вариантах осуществления высокочастотные фильтры 302, 501 используются для детектирования ультразвуковых акустических сигналов в мегагерцевом диапазоне. Если энергия в мегагерцевом диапазоне чрезмерная, считается, что происходит кавитация и частота вращения двигателя 110 может быть снижена пропорционально степени происходящей кавитации. В еще одном варианте осуществления (фиг. 5) энергия в мегагерцевом диапазоне нормализована относительно энергии в килогерцевом диапазоне. Также раскрыты датчики 600, 701. Раскрытия в реферате настоящей заявки и весь документ GB 0714695.4 (на приоритет которого притязает настоящая заявка) включены в настоящий документ путем ссылки. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система для детектирования кавитации при эксплуатации гидравлического механизма, содержащая акустический датчик (102, 602, 701); высокочастотный фильтр (302), имеющий частоту отсечки, больше или равную 1 МГц, и пропускающий частоты до 5 МГц для фильтрации сигнала от акустического датчика (102); первый детектор (303) для подачи сигнала, характеризующего энергию в сигнале от акустического датчика, отфильтрованном по высокой частоте; контрольный приемник (305) для приема контрольного сигнала от источника контрольного сигнала; компаратор (304) для сравнения сигнала от первого детектора (303) с контрольным сигналом и выдачи выходного сигнала, если сигнал от первого детектора превышает контрольный сигнал. 2. Система по п.1, содержащая усилитель (301) для усиления сигнала от акустического датчика(102). 3. Система по любому предшествующему пункту, отличающаяся тем, что высокочастотный фильтр(302) является частью полосового фильтра (502), содержащего низкочастотный фильтр. 4. Система по п.3, отличающаяся тем, что низкочастотный фильтр имеет верхнюю частотную характеристику акустического датчика. 5. Система по любому предшествующему пункту, содержащая низкочастотный фильтр (502) для фильтрации сигнала от акустического датчика (102); второй детектор (503) для подачи сигнала, указывающего энергию в сигнале от акустического датчика, отфильтрованном по низкой частоте, и являющегося источником контрольного сигнала,отличающаяся тем, что контрольный приемник (305) предназначен для приема сигнала от второго детектора (503) в качестве контрольного сигнала. 6. Система по п.5, отличающаяся тем, что низкочастотный фильтр (502) имеет частоту отсечки по меньшей мере одного значения из 1, 10, 100 кГц и 1 МГц. 7. Система по любому предшествующему пункту, содержащая контроллер (306), используемый для управления рабочим состоянием гидравлического механизма (100, 700), чтобы уменьшить кавитацию в том случае, если компаратор (304) укажет, что сигнал от первого детектора (303) превышает контрольный сигнал. 8. Система по любому предшествующему пункту, отличающаяся тем, что контроллер содержит контроллер (306) двигателя, выполненный с возможностью уменьшения частоты вращения двигателя(110) в том случае, если сигнал от первого детектора (303) превышает контрольный сигнал. 9. Система по п.8, содержащая двигатель (110). 10. Система по п.9, содержащая насос (100, 700), подсоединенный к двигателю (110), и отличающаяся тем, что акустический датчик (102, 602, 701) расположен относительно насоса так, чтобы отслеживать кавитацию в насосе (100). 11. Система по любому предшествующему пункту, отличающаяся тем, что акустический датчик 12. Система по п.11, отличающаяся тем, что пьезоэлектрический материал содержит полимерный пьезоэлектрический материал. 13. Система по п.12, отличающаяся тем, что прокладка содержит ПВДФ. 14. Система по любому одному из пп.11-13, отличающаяся тем, что прокладка расположена на входе (101) насоса (100). 15. Система по любому одному из пп.1-10, отличающаяся тем, что акустический датчик (102) имеет резиновый акустический соединитель (601), один или больше полимерных пьезоэлектрических слоев(602 а, 602b, 602 с) и захватную часть (603). 16. Система по п.15, отличающаяся тем, что резиновый акустический соединитель (601) содержит резину, имеющую твердость по Шору в диапазоне от 10 до 20. 17. Система по любому одному из пп.1-10, отличающаяся тем, что акустический датчик (701) расположен в выемке (702) на корпусе (703) насоса (700). 18. Способ детектирования кавитации в гидравлической машине, включающий следующие этапы: прием сигнала от акустического датчика (303), который акустически связан с гидравлической машиной; высокочастотная фильтрация сигнала от акустического датчика (303) с помощью высокочастотного фильтра (302), имеющего частоту отсечки, больше или равную 1 МГц, и пропускающего частоты до 5 МГц; подача сигнала, указывающего на энергию в сигнале от акустического датчика, отфильтрованном по высокой частоте; сравнение сигнала, указывающего на энергию, с контрольным сигналом, полученным от источника контрольного сигнала, и выдача выходного сигнала, если сигнал, указывающий на энергию, превышает контрольный сигнал.
МПК / Метки
МПК: F04D 29/66, G01N 29/02, G01N 29/42, G01N 29/44, G01N 29/14, F04B 49/06
Метки: детектирование, кавитации
Код ссылки
<a href="https://eas.patents.su/8-19866-detektirovanie-kavitacii.html" rel="bookmark" title="База патентов Евразийского Союза">Детектирование кавитации</a>
Детектирование вируса папилломы человека
Номер патента: 10500
Опубликовано: 30.10.2008
Автор: Карльсен Франк
МПК: C12Q 1/70
Метки: детектирование, вируса, папилломы, человека
Формула / Реферат:
1. In vitro способ скрининга человека на предмет наличия вируса папилломы человека по меньшей мере в одной клетке или ткани, при этом в вирусе папилломы человека (HPV) наблюдается нарушение регуляции экспрессии мРНК Е6/Е7 и снижение репликации и/или экспрессии стабилизированной пре-мРНК, которая кодирует полноразмерный белок E6, причем данный способ включает в себя детектирование присутствия транскриптов мРНК гена Е6/Е7 вируса папилломы...
Следующий патент: Водные офтальмологические препараты
Случайный патент: Способ отделения и очистки цезия-131 из нитрата бария