Машина для сортировки упаковок
Формула / Реферат
1. Машина (1) для сортировки упаковок, содержащая средства (2) подачи упаковок по меньшей мере на одну позицию (3) манипулирования и ориентирования, на которой имеются по меньшей мере один ленточный транспортер (6) и по меньшей мере одна головка (7) манипулятора, установленная с возможностью перемещения по трем взаимно перпендикулярным осям пространственной системы координат и поворота относительно, по существу, вертикальной оси для ориентирования упаковок, находящихся на верхней поверхности (6а) ленты транспортера (6), в процессе их перемещения на транспортере (6), отличающаяся тем, что средства (2) подачи упаковок включают пару ленточных транспортеров (4, 5) с переменной и независимо регулируемой скоростью движения ленты для синхронизации подачи упаковок до их поступления на позицию (3) манипулирования.
2. Машина по п.1, отличающаяся тем, что головка (7) манипулятора снабжена захватом для перемещения упаковок.
3. Машина по п.2, отличающаяся тем, что захват имеет две губки (8а, 8b), одна (8а) из которых неподвижно закреплена на раме головки (7) манипулятора, а другая (8b) закреплена на подвижном штоке (9) выполненного заодно с головкой (7) цилиндра (10).
4. Машина по п.1, отличающаяся тем, что средства (2) подачи упаковок на позицию манипулирования включают пару ленточных транспортеров (4, 5).
5. Машина по п.4, отличающаяся тем, что на каждый ленточный транспортер предусмотрено по меньшей мере по одному приводному двигателю, по одному датчику частоты вращения вала приводного двигателя, по одному фотоэлементу для определения наличия упаковки на ленточном транспортере и по одному процессору.
6. Машина по п.1, отличающаяся тем, что головка (7) манипулятора установлена с возможностью перемещения по направляющей (7а), которая расположена перпендикулярно направлению подачи ленточного транспортера (6) и установлена на рельсах (7b) с возможностью перемещения в направлении, по существу, параллельном направлению движения ленточного транспортера (6).
7. Машина по п.1, отличающаяся тем, что верхняя поверхность (6а) ленты транспортера (6) является плоской и расположена в одной, практически горизонтальной, плоскости.
8. Машина любому из предыдущих пунктов, отличающаяся тем, что ленточные транспортеры (4, 5) расположены вне позиции (3) манипулирования с обеспечением выгрузки упаковок на ее ленточный транспортер (6).

Текст
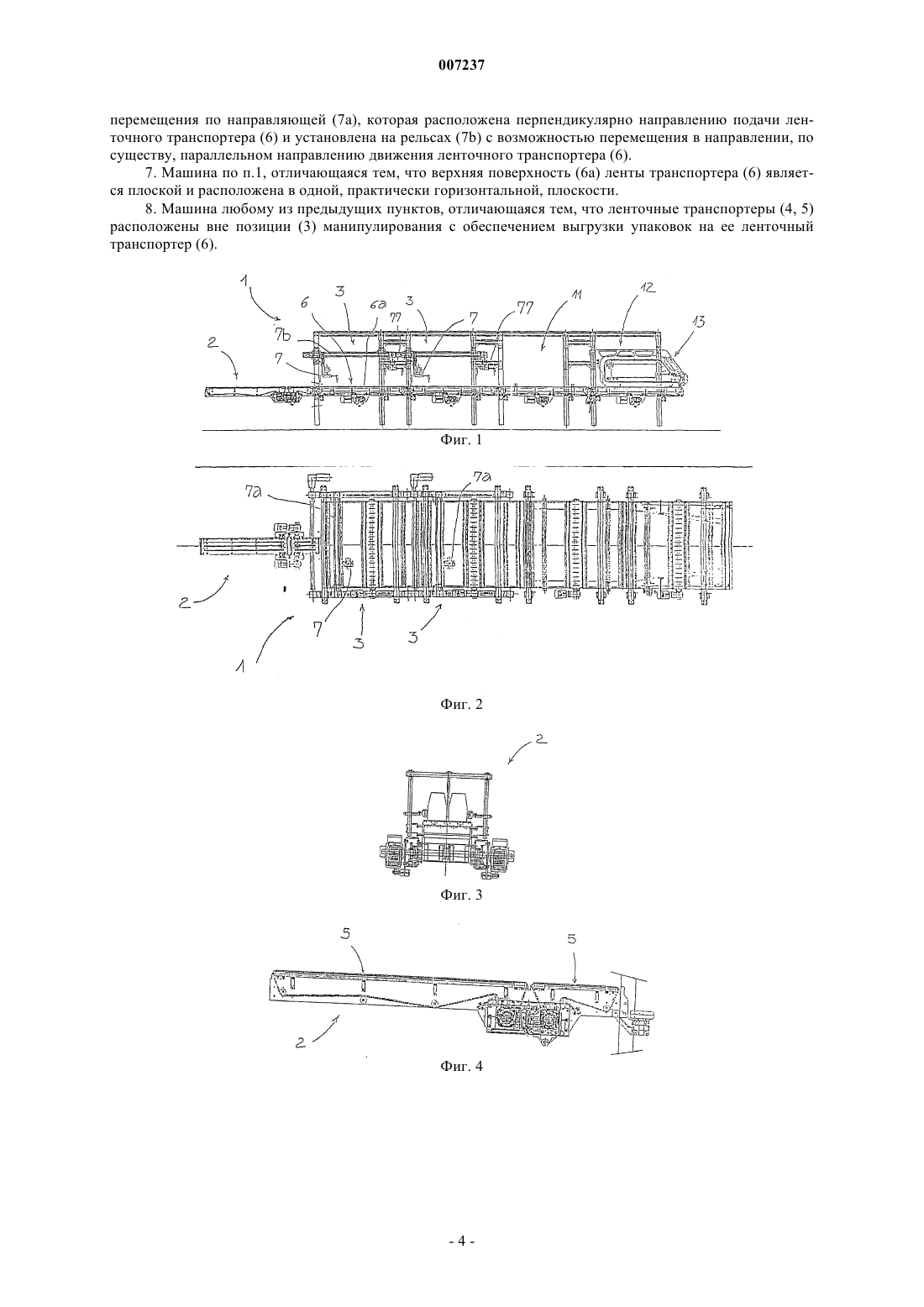
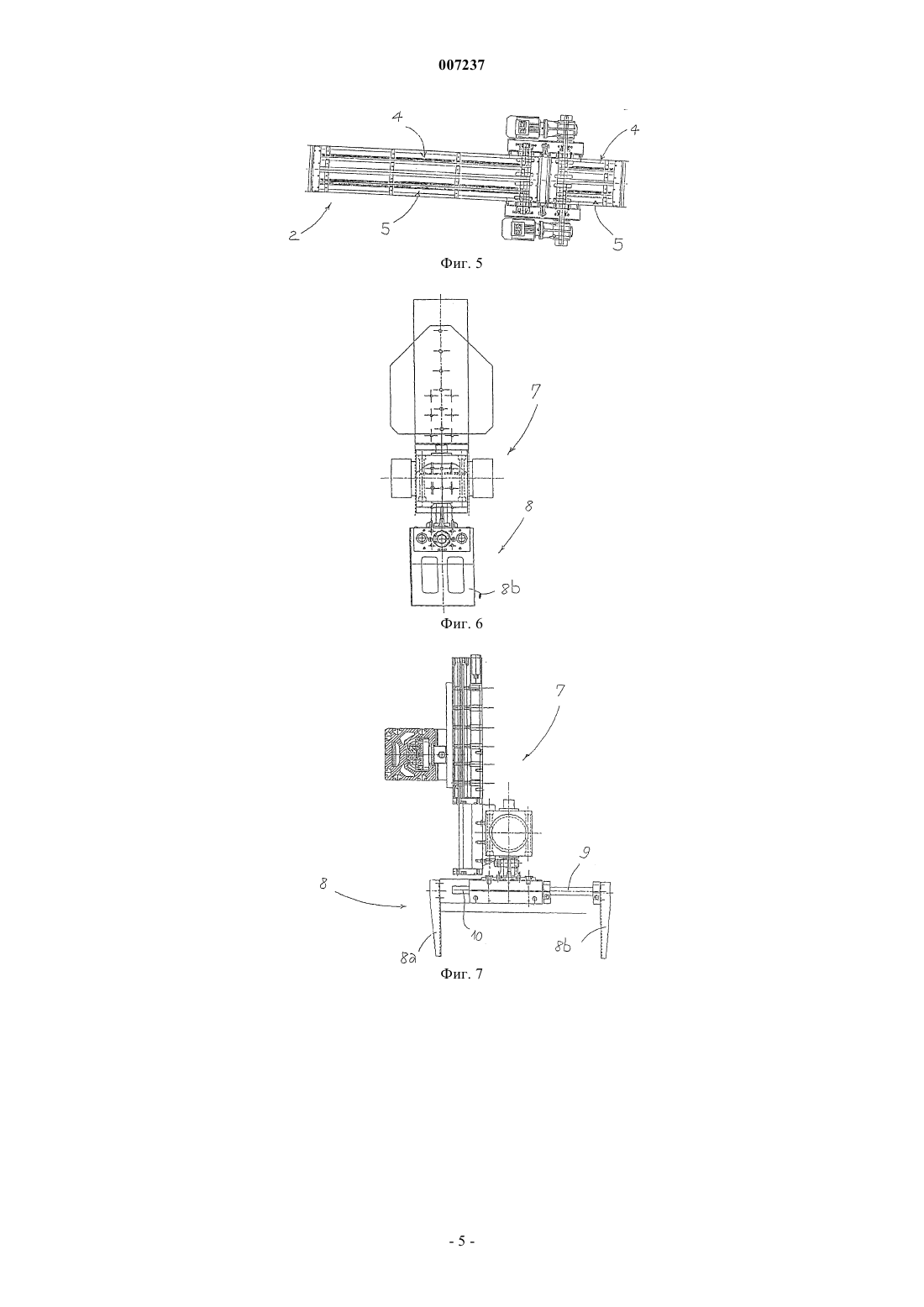
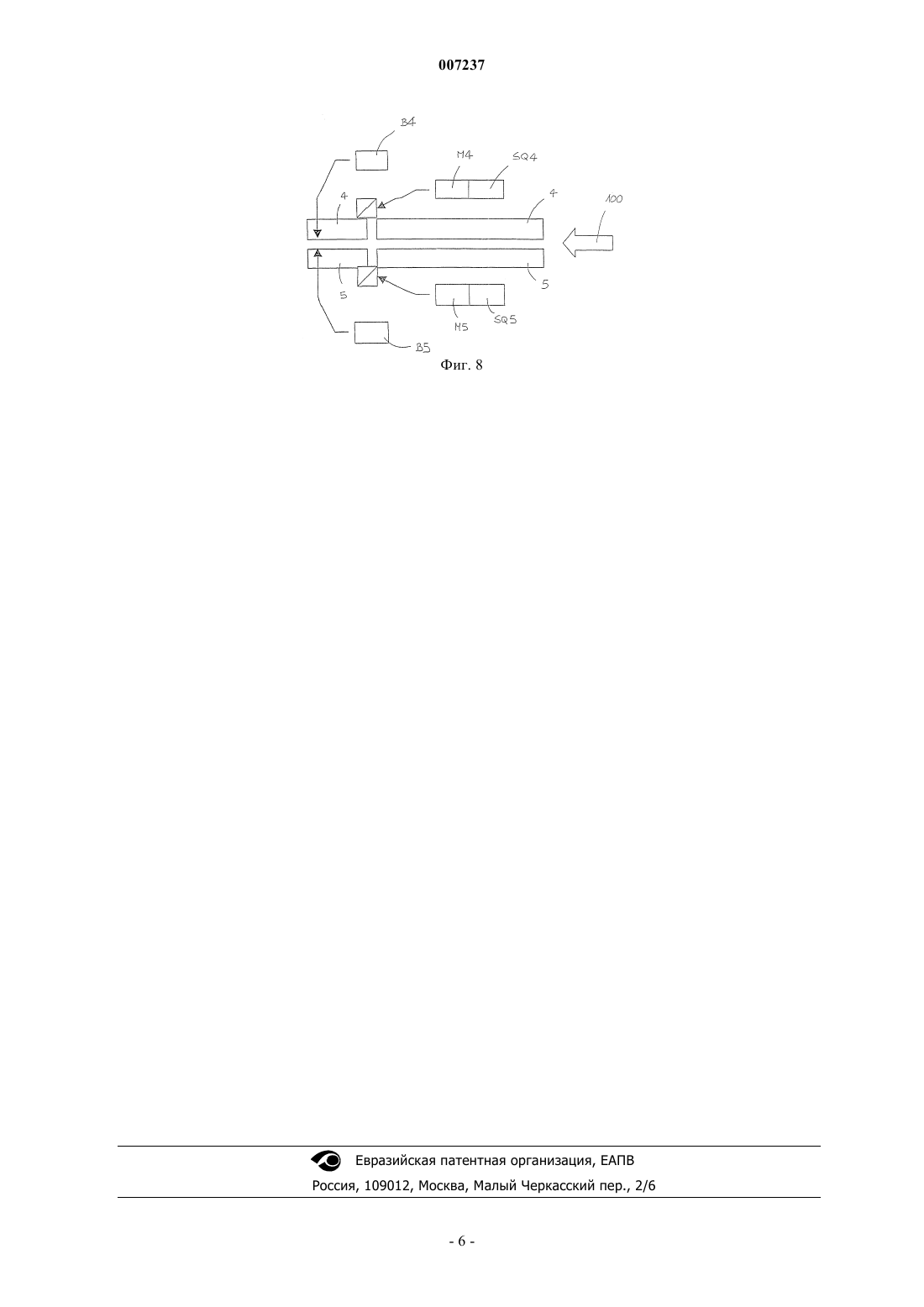
007237 Область техники и предпосылки создания изобретения Настоящее изобретение относится к машине для сортировки упаковок, содержащей средства подачи упаковок на позицию манипулирования и ориентирования. Хорошо известно, что пакетирование (укладка) упаковок на поддонах требует использования специальных расположенных за линиями для перемещения и/или обработки содержащихся в упаковках продуктов устройств, предназначенных для манипулирования упаковками и/или их ориентирования. Особенно остро необходимость в таких устройствах ощущается при обработке емкостей для напитков,например, изготовленных из стекла или пластмассы банок или бутылок, предназначенных для продажи воды, пива или вина. Емкости с такими напитками обычно упаковывают в ящики, картонные коробки или собирают группами или блоками в специальной таре. В патенте EP 1046598 описана машина для манипулирования упаковками емкостей, обычно банок или бутылок, которые сортируют или ориентируют определенным образом для последующего пакетирования на поддонах. Предложенная в этом патенте машина содержит позицию для выравнивания и разделения упаковок,снабженную множеством параллельных и диагональных направляющих с подвижными захватами. Каждый захват берет упаковку и ориентирует ее в нужное для последующей установки на поддон положение. Расположенные в один или несколько рядов упаковки подают в эту позицию ленточным транспортером. Скорость движения захватов по диагональным направляющим регулируют процессором и меняют в зависимости от скорости ленточного транспортера так, чтобы захваты могли перемещаться вслед за отдельными упаковками и устанавливать их в правильное по углу положение относительно направления движения транспортера. Предложенная в упомянутом выше патенте машина имеет один существенный недостаток, связанный с большим количеством захватов, предназначенных для перемещения расположенных рядами на ленточном транспортере упаковок. Захваты должны перемещаться в диагональном направлении и поэтому не могут следовать за упаковками, которые одновременно подходят к позиции для их выравнивания и разделения. Точнее говоря, недостаток такой машины связан с тем, что захват имеет фактически одну степень свободы, которая соответствует его диагональному движению вдоль направляющей. В настоящее время известна также и другая машина для манипулирования упаковками, которая предназначена исключительно для поворота упаковок с помощью неподвижных ограничителей, в которые асимметрично упираются находящиеся на ленте транспортера упаковки. При асимметричном упоре в ограничители каждая упаковка поворачивается вокруг своей, по существу, вертикальной барицентрической оси. Такая машина также имеет один очень существенный недостаток, связанный с возможным нарушением целостности упаковки и повреждением всех находящихся в ней объектов (емкостей). Этот недостаток особенно остро проявляется в пивной промышленности, поскольку находящиеся в упаковках сравнительно тонкие и непрочные изготовленные из стекла заполненные пастеризованным (и поэтому горячим) пивом бутылки при ударе упаковки в ограничители могут легко разбиться. Краткое изложение сущности изобретения Задачей настоящего изобретения является устранение упомянутых выше недостатков и создание машины для сортировки упаковок, которую можно использовать для сортировки и ориентирования упаковок в широком диапазоне конфигураций, удовлетворяющих любым возможным требованиям, касающимся пакетирования (укладки) различных упаковок на соответствующих поддонах. Другой задачей настоящего изобретения является создание машины для сортировки упаковок, которые можно эксплуатировать, не рискуя содержимым упаковки. Задачей изобретения является, в частности, создание машины для сортировки упаковок, которую можно использовать на линях бутылочного разлива для сортировки любых упаковок, в которых находятся бутылки, изготовленные из стекла, или другой очень хрупкий и легко бьющийся материал. Еще одной задачей настоящего изобретения является получение указанных выше результатов рациональным и конструктивно надежным способом. Перечисленные выше задачи в полном объеме решаются предлагаемой в изобретении машиной для сортировки упаковок, отличительные особенности которой указаны в приведенной ниже формуле изобретения. Предпочтительный вариант выполнения изобретения Перечисленные выше и другие отличительные особенности изобретения подробно рассмотрены в приведенном ниже описании на примере предпочтительного, но не ограничивающего изобретение варианта его возможного осуществления со ссылками на приложенные к описанию чертежи, на которых показано на фиг. 1 - вид сбоку предлагаемой в изобретении машины для сортировки упаковок; на фиг. 2 - вид сверху сортировочной машины, показанной на фиг. 1;-1 007237 на фиг. 3 - вид спереди устройства для подачи упаковок в сортировочную машину, показанную на фиг. 1; на фиг. 4 и 5 - виды сбоку и соответственно сверху устройства подачи, показанного на фиг. 3; на фиг. 6 и 7 - виды сбоку и соответственно спереди одного из узлов сортировочной машины, показанной на фиг. 1; на фиг. 8 - схема, иллюстрирующая работу устройства подачи, показанного на фиг. 3, 4 и 5. Показанная, в частности, на фиг. 1 и 2 машина 1 для сортировки упаковок имеет средства 2 подачи упаковок по меньшей мере на одну позицию 3 для манипулирования упаковками и их ориентирования. В показанном на чертежах примере средства 2 подачи упаковок включают пару ленточных транспортеров 4, 5 с переменной и независимо регулируемой скоростью движения ленты, обеспечивающих синхронную подачу упаковок перед их поступлением на позицию 3 манипулирования. Наличие двух ленточных транспортеров позволяет подавать упаковки на позицию манипулирования двумя рядами и тем самым оптимизирует и увеличивает производительность всей технологической линии. Однако синхронизируя движение транспортеров, их можно использовать для перемещения и подачи на позицию манипулирования упаковок, расположенных в один ряд одновременно на лентах обоих транспортеров. Ленточные транспортеры 4, 5 расположены вне позиции 3 манипулирования с обеспечением выгрузки упаковок на следующий ленточный транспортер (6), относящийся к позиции 3 манипулирования и являющийся точным продолжением ленточных транспортеров 4, 5. На позиции 3 манипулирования исходно имеется по меньшей мере одна головка 7 манипулятора по меньшей мере с двумя степенями свободы. На фиг. 1 головка манипулятора показана в двух разных рабочих положениях: в первом положении головка обозначена позицией 7, а во втором - позицией 77. В показанном на чертежах варианте головка 7 манипулятора установлена с возможностью перемещения по трем взаимно-перпендикулярным осям пространственной системы координат. В частности,головка 7 манипулятора может поступательно перемещаться в двух (не показанных на чертежах) направлениях X И Y B плоскости, параллельной верхней поверхности 6 а ленты транспортера 6, а также вдоль по существу вертикальной (не показанной на чертежах) оси Z, перпендикулярной плоскости, параллельной верхней поверхности 6 а ленты транспортера 6. Головка 7 манипулятора также установлена с возможностью поворота относительно по существу вертикальной оси для поворота упаковок на определенный угол в соответствии с их положением на поддоне. Головка 7 манипулятора может перемещаться по направляющей 7 а, которая расположена перпендикулярно направлению подачи ленточного транспортера 6. В свою очередь направляющая 7 а может перемещаться по рельсам 7b в направлении, по существу, параллельно направлению движения транспортера 6. Как показано на фиг. 6 и 7, головка 7 манипулятора снабжена захватом 8 для перемещения упаковок по поверхности ленты транспортера 6. В показанном на чертежах варианте захват имеет две конечности (рабочих органа), или губки 8 а, 8b, расстояние между которыми можно регулировать в соответствии с размерами упаковок. При этом одна (первая) губка 8 а неподвижно закреплена на раме головки 7 манипулятора, а другая (вторая) губка 8b закреплена на подвижном штоке 9 соответствующего цилиндра 10, выполненного заодно с головкой 7. В рассматриваемом варианте предлагаемая в изобретении машина 1 для сортировки упаковок содержит две расположенных непосредственно друг за другом позиций 3 манипулирования, каждая из которых имеет свой ленточный транспортер. Предлагаемая в изобретении сортировочная машина 1 имеет также позицию 11, в которой собираются отсортированные и расположенные определенным образом упаковки и которая также имеет свой собственный ленточный транспортер, работающий независимо от других транспортеров машины. В предпочтительном варианте изобретения все ленточные транспортеры предлагаемой в изобретении сортировочной машины работают независимо друг от друга от отдельных приводов. За позициями 11, в которой собираются отсортированные и ориентированные определенным образом упаковки, расположена позиция 12 со средствами 13 перемещения упаковок на автоматический укладчик на поддоны (штабелер). Предлагаемая в изобретении машина для сортировки упаковок работает следующим образом. Перемещаемые ленточными транспортерами 4, 5 упаковки на позиции 3 манипулирования попадают на ленточный транспортер 6. Синхронизация подачи упаковок осуществляется двумя показанными на фиг. 8 расположенными друг против друга фотоэлементов (В 4 и В 5), двумя датчиками (SQ4 и SQ5) частоты вращения валов приводных двигателей (М 4 и M5) ленточных транспортеров 4, 5 и счетчиком (Z), вычисляющим скорость движения лент транспортеров. В предпочтительном варианте изобретения счетчик (Z) встроен в процессор (PC). Стрелкой 100 показано направление движения упаковок. Если допустить, что упаковка, находящаяся на ленте транспортера 4, подается с опережением, т.е. находится впереди упаковки, находящейся на ленте транспортера 5, то когда опережающая упаковка по-2 007237 равняется с фотоэлементом В 4, датчик SQ4 выдаст сигнал частоты вращения вала двигателя М 4 с целью увеличения значения (показания) счетчика Z. На основании принятого счетчиком значения вычисляется величина уменьшения частоты вращения вала двигателя М 4, в результате чего движение ленты транспортера 4 должно замедлиться. Заданная скорость движения ленты транспортера 4 определяется, в частности, путем вычитания из скорости движения ленты транспортера 5 величины, пропорциональной значению счетчика (Z). Когда отстающая, т.е. находящаяся далеко позади, упаковка, поравняется с фотоэлементом В 5, датчик SQ5 выдаст сигнал частоты вращения вала двигателя М 5, с уменьшением значения Z таким образом,чтобы увеличить скорость движения ленты транспортера 4. Если значение счетчика Z станет слишком большим (т.е. при очень большом расстоянии между находящимися на разных транспортерах упаковками, которые требуется выровнять для синхронного поступления на позицию 3), двигатель М 4 будет остановлен. Когда счетчик Z станет равен нулю, подача упаковок транспортерами 4 и 5 будет синхронизирована(станет попарно-одновременной). Если же машина для сортировки упаковок должна работать в режиме перемещения упаковок лентами одновременно обоих транспортеров, движение этих лент необходимо синхронизировать. Осуществляется это следующим образом. Сначала из двух транспортеров выбирают главный транспортер, например транспортер 4, и задают частоту вращения вала двигателя М 4. Значение счетчика увеличивается по сигналам от датчика SQ4 и одновременно уменьшается по сигналам от датчика SQ5. Абсолютное значение, полученное из этой алгебраической суммы, позволяет синхронизировать работу транспортеров по скорости подачи. В частности, при положительном значении счетчика Z вал двигателя М 4 вращается быстрее вала двигателя М 5, и поэтому частоту вращения вала двигателя М 5 увеличивают относительно частоты вращения вала двигателя М 4 на величину, рассчитанную по значению счетчика Z; при отрицательном значении значения счетчика вал двигателя М 5 вращается быстрее вала двигателя М 4, и частоту вращения вала двигателя М 5 уменьшают относительно частоты вращения вала двигателя М 4 на величину, рассчитанную по значению счетчика Z. При нулевом значении счетчика Z оба ленточных транспортера движутся с одной и той же скоростью. Во время движения упаковок на транспортере 6 головка 7 манипулятора следует за ними и при необходимости захватывает определенные упаковки и ориентирует их в соответствии с их положением на поддоне. Предлагаемая в изобретении сортировочная машина обладает рядом важных преимуществ. Во-первых, наличие головки 7 манипулятора с несколькими степенями свободы позволяет в широких пределах менять ориентацию упаковок и схему их пакетирования (укладки) на различных поддонах. Во-вторых, наличие нескольких позиций манипулирования позволяет очень эффективно и гибко регулировать производительность всей предлагаемой в изобретении сортировочной машины. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Машина (1) для сортировки упаковок, содержащая средства (2) подачи упаковок по меньшей мере на одну позицию (3) манипулирования и ориентирования, на которой имеются по меньшей мере один ленточный транспортер (6) и по меньшей мере одна головка (7) манипулятора, установленная с возможностью перемещения по трем взаимно перпендикулярным осям пространственной системы координат и поворота относительно, по существу, вертикальной оси для ориентирования упаковок, находящихся на верхней поверхности (6 а) ленты транспортера (6), в процессе их перемещения на транспортере (6), отличающаяся тем, что средства (2) подачи упаковок включают пару ленточных транспортеров (4, 5) с переменной и независимо регулируемой скоростью движения ленты для синхронизации подачи упаковок до их поступления на позицию (3) манипулирования. 2. Машина по п.1, отличающаяся тем, что головка (7) манипулятора снабжена захватом для перемещения упаковок. 3. Машина по п.2, отличающаяся тем, что захват имеет две губки (8 а, 8b), одна (8 а) из которых неподвижно закреплена на раме головки (7) манипулятора, а другая (8b) закреплена на подвижном штоке(9) выполненного заодно с головкой (7) цилиндра (10). 4. Машина по п.1, отличающаяся тем, что средства (2) подачи упаковок на позицию манипулирования включают пару ленточных транспортеров (4, 5). 5. Машина по п.4, отличающаяся тем, что на каждый ленточный транспортер предусмотрено по меньшей мере по одному приводному двигателю, по одному датчику частоты вращения вала приводного двигателя, по одному фотоэлементу для определения наличия упаковки на ленточном транспортере и по одному процессору. 6. Машина по п.1, отличающаяся тем, что головка (7) манипулятора установлена с возможностью-3 007237 перемещения по направляющей (7 а), которая расположена перпендикулярно направлению подачи ленточного транспортера (6) и установлена на рельсах (7b) с возможностью перемещения в направлении, по существу, параллельном направлению движения ленточного транспортера (6). 7. Машина по п.1, отличающаяся тем, что верхняя поверхность (6 а) ленты транспортера (6) является плоской и расположена в одной, практически горизонтальной, плоскости. 8. Машина любому из предыдущих пунктов, отличающаяся тем, что ленточные транспортеры (4, 5) расположены вне позиции (3) манипулирования с обеспечением выгрузки упаковок на ее ленточный транспортер (6).
МПК / Метки
МПК: B65G 47/31, B65G 47/08, B65B 35/10, B25J 15/00
Метки: машина, сортировки, упаковок
Код ссылки
<a href="https://eas.patents.su/7-7237-mashina-dlya-sortirovki-upakovok.html" rel="bookmark" title="База патентов Евразийского Союза">Машина для сортировки упаковок</a>
Самовскрывающее укупорочное устройство для композитных упаковок или для горловин упаковок или бутылок, закрытых плёночным материалом
Номер патента: 6671
Опубликовано: 24.02.2006
Авторы: Хубер Хансйорг, Вайст Марио, Сеелхофер Фритц
МПК: B65D 5/74, B65D 51/22
Метки: упаковок, самовскрывающее, закрытых, горловин, композитных, плёночным, укупорочное, устройство, бутылок, материалом
Формула / Реферат:
1. Самовскрывающее укупорочное устройство для композитных упаковок, а также для закрываемых пленочным материалом штуцеров упаковок или горловин бутылей, состоящее из разливного штуцера (2), герметично монтируемого на композитную упаковку или на закрываемый пленочным материалом штуцер упаковки или горловину бутыли, входящего в устройство поворотного колпачка (1), а также расположенной внутри разливного штуцера (2) самовскрывающей втулки (3),...
Способ определения подлинности, достоинства и степени ветхости денежных билетов и устройство сортировки и счета

Номер патента: 3308
Опубликовано: 24.04.2003
Авторы: Терентьев Олег Владимирович, Ардашов Михаил Геннадьевич, Нигматуллин Фарид Танурович, Фомина Ирина Александровна, Беренов Дмитрий Александрович, Безбородов Дмитрий Сергеевич, Поникаровских Александр Эдуардович, Дегтярев Александр Георгиевич, Попов Дмитрий Валентинович, Гайнанов Дамир Насибуллович
МПК: G07D 3/00, B65H 29/60
Метки: сортировки, достоинства, степени, билетов, денежных, устройство, подлинности, счета, способ, определения, ветхости
Формула / Реферат:
1. Устройство сортировки и счета денежных билетов, состоящее из корпуса, в котором размещены блок управления с интерактивным интерфейсом регулировки параметров сортировки через дисплей и клавиатуру, блок поштучной подачи денежных билетов из стопы, транспортной системы для подачи денежных билетов к детекторам узла контроля прохождения и счета денежных билетов, узла определения подлинности, достоинства и степени ветхости денежных билетов, узла...
Устройство для загрузки упаковок в грузовой отсек, в частности, самолета
Номер патента: 920
Опубликовано: 26.06.2000
Автор: Хельмнер Андерс
МПК: B64D 9/00
Метки: грузовой, отсек, устройство, частности, загрузки, самолета, упаковок
Формула / Реферат:
1. Устройство для загрузки упаковок в грузовой отсек (3), в частности, самолета, содержащее транспортер (4), который приводится в действие двигателем, например, для перемещения, начинающегося от загрузочного проема (2) грузового отсека (3), в направлении вдоль направления грузового отсека (3) к противоположному его концу и обратно, в котором блок привода расположен в области конца упомянутого устройства напротив конца, ближайшего к загрузочному...
Изменяемое раздаточное устройство для упаковок
Номер патента: 1301
Опубликовано: 25.12.2000
Авторы: Симиле-Гравина Николина К., Роденхайсер Лесли С., Подхейсер Алисса Ф.
МПК: B65D 5/00, A47F 1/04, B65G 59/00...
Метки: изменяемое, упаковок, раздаточное, устройство
Формула / Реферат:
1. Изменяемое раздаточное устройство для упаковок, содержащее картонную коробку в форме параллелепипеда, имеющую полую внутреннюю часть такого размера, чтобы вмещать множество упаковок для раздачи, причем картонная коробка образована первой и второй парами противолежащих продольных стенок, каждая из которых имеет прямоугольную форму, и одной парой противолежащих торцевых стенок, причем каждая торцевая стенка имеет меньший размер, чем каждая из...
Способ сортировки птиц in ovo
Номер патента: 734
Опубликовано: 28.02.2000
Автор: Фелпс Патрисия В.
МПК: G01N 33/50, A01K 67/00
Метки: способ, птиц, сортировки
Формула / Реферат:
1. Способ определения пола птиц in ovo, включающий стадии обнаружения присутствия или отсутствия повышенного уровня полового гормона во внезародышевой жидкости птичьего яйца; и определения пола птицы, находящейся в яйце, исходя из присутствия повышенного уровня указанного полового гормона во внезародышевой жидкости. 2. Способ по п.1, где внезародышевой жидкостью является аллантоисная жидкость. 3. Способ по п.1, где указанную стадию обнаружения...
Предыдущий патент: Пневмоподатчик (варианты)
Следующий патент: Способ изоляции и ограничения водопритока в скважины
Случайный патент: Антагонисты рецепторов эндотелина