Мускульные движители пловца
Формула / Реферат
1. Бедренный мускульный движитель пловца, включающий мускульный двигатель, содержащий опору (1) туловища, кинематически сопряженные с ним два плавника, отличающийся тем, что непосредственно к опоре (1) туловища мускульного двигателя прикреплены кронштейны (6), соединенные с осями (7) с рычагами (8) с прикрепленным к ним плавником (9), рычаги (8) плавника осями (10, 12) и тягами (11) кинематически соединены с бедренными рычагами (3) мускульного двигателя.
2. Бедренный мускульный движитель пловца, включающий мускульный двигатель, кинематически сопряженный с ним один плавник, отличающийся тем, что непосредственно к опоре (1) туловища мускульного двигателя прикреплен кронштейн (13), жестко скрепленный с круговыми направляющими (14), кинематически сопряженными с круговым ползуном (14), жестко скрепленным с кронштейном (16), который осью (17) кинематически соединен с рычагом (18) плавника и с плавником (19), а жестко скрепленные с рычагом (18) плавника кронштейны (20) через карданные шарниры (21, 23), имеющие не менее двух степеней свободы вращательных движений, и тяги (22) кинематически соединены с бедренными рычагами (3) мускульного двигателя.
3. Бедренный мускульный движитель пловца по п.1 или 2, отличающийся тем, что к опоре (1) туловища прикреплена опора (47) головы.
4. Плечевой мускульный движитель пловца, содержащий опору (1) туловища, отличающийся тем, что к передним краям опоры (1) туловища прикреплены шаровые шарниры (29), регулируемые тяги (30), шаровые шарниры (31), к внешним сферам (32) которых жестко прикреплены направляющие (33) плавника и перпендикулярные к ним оси (34) плавников, соединенные кинематически с рычагами (35, 36) плавников, с жестко закрепленными на них плоскостями (45, 46) плавников и направляющие (33) плавников кинематически сопряжены с направляющими (28) плеча, жестко скрепленными с плечевыми рычагами (24), которые скреплены упругими креплениями (25) плеча с плечом, креплениями (26) лопаток с опорой (1) туловища, креплениями (27) груди между собой, между плечевыми рычагами (24) на уровне центра плечевых суставов, с обеспечением непосредственной передачи боковых движений плеч по кинематической цепи плоскостям (45, 46) плавников, и направляющие (33) плавников кинематически сопряжены с ползуном (37) и соединенным с отжимающим его амортизатором (38), а ползун (37) через шарниры (39, 43) кинематически соединен с рычагами (35, 36) плавника, этим конструктивно обеспечивается смыкание плоскостей (45, 46) плавников от нажима амортизатора (38) или раскрытие плоскостей (45, 46) плавников от толчка плечевого рычага (24) и направляющих (28) плеч при подъеме плеча вверх, и этим же движением обеспечивается сжатие амортизатора (38).

Текст
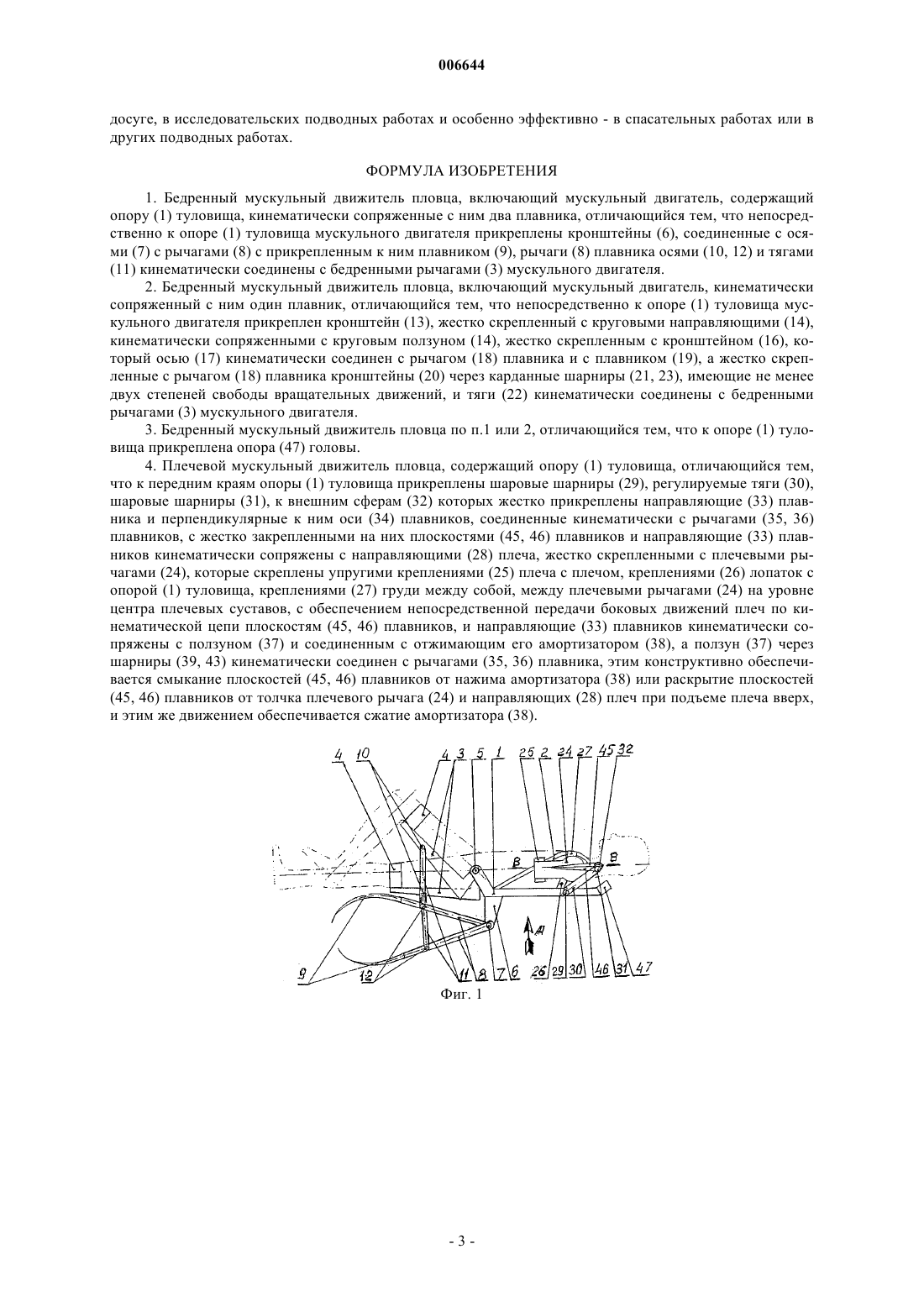
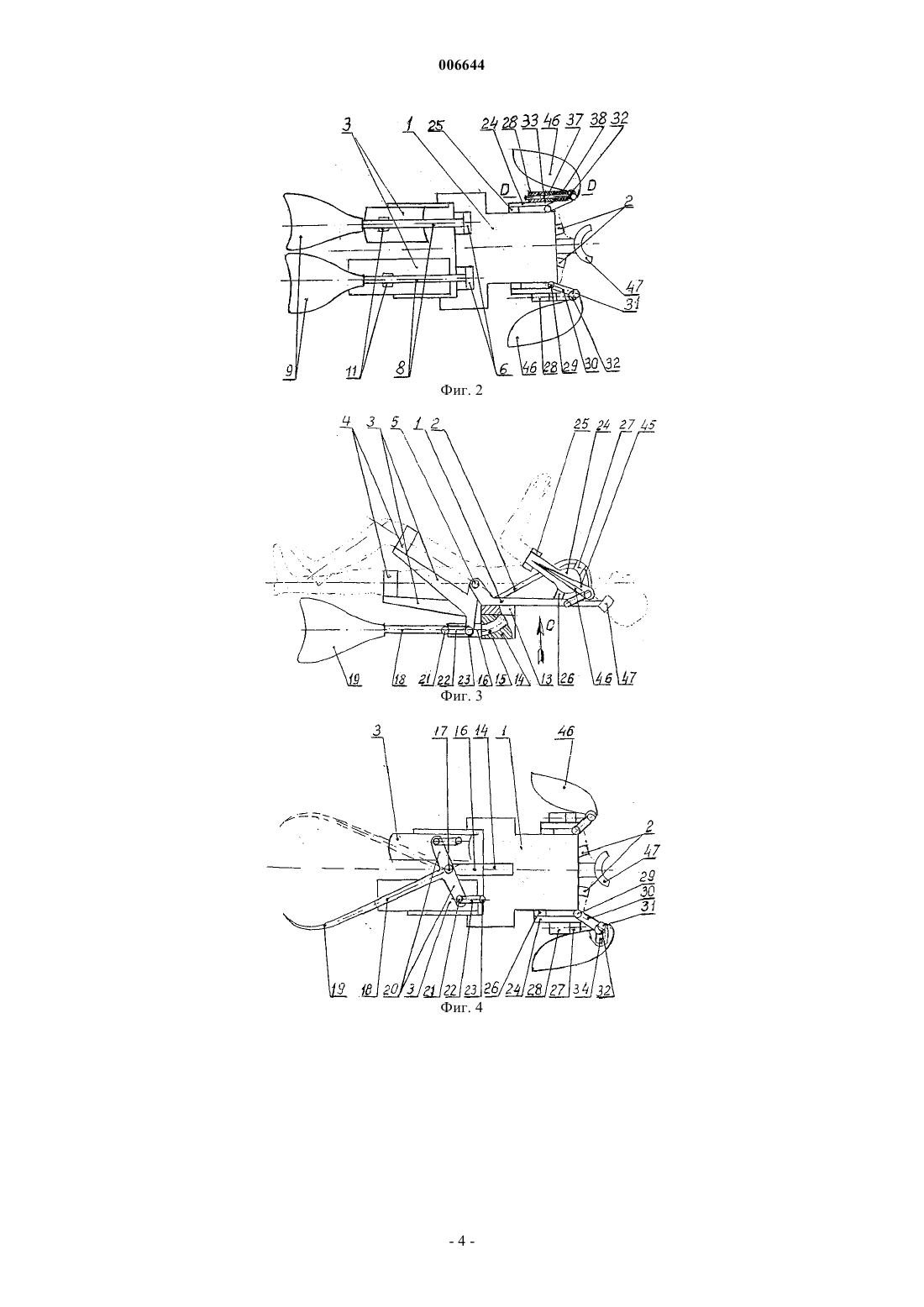
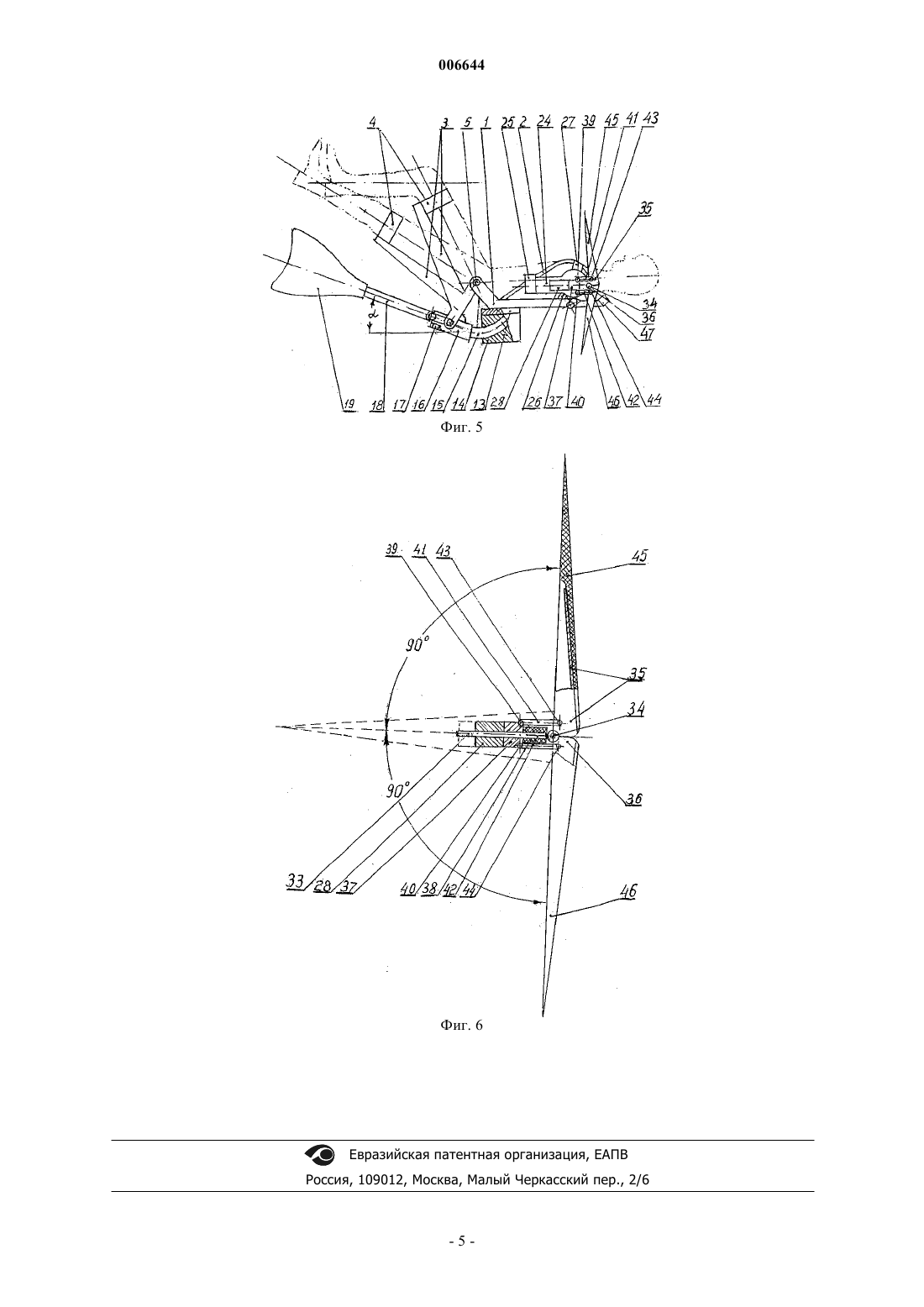
006644 Изобретение относится к плавательной технике, использующей мускульную силу пловца. Известен индивидуальный движитель пловца (патент Франции 2094538, В 23 Н 16/14), который содержит опору, ремень для прикрепления опоры к туловищу, прикрепленные к опоре педали, с помощью которых усилия передаются от ступней. Известно спортивное плавательное устройство (патент Германии DE4410674 А 1, В 63 Н 16/18), которое содержит плавучий корпус с прикрепленным к нему плавником, соединенный с педалями. Известна надувная пляжная рыба (патент Франции 2164535,В 63 Н 16/00), которую двигает плавник с прикрепленными к нему педалями. Недостатками всех этих устройств является то, что плавники закреплены отдельно от тела пловца,не образуя с ним непосредственных кинематических связей и единого механизма, что не позволяет эффективно использовать наиболее сильные мускулы бедер для непосредственных движений плавников. Целью настоящего изобретения является всестороннее повышение возможностей человека-пловца за счет создания движителей, которые позволили бы ему быстро плавать, свободно маневрировать, нырять в воде, приближая его возможности к возможностям резво плавающих водных животных. Указанная цель достигается тем, что используются два мускульных движителя: бедренный мускульный движитель (первый), предназначенный для быстрого и эффективного движения вперед, и плечевой мускульный движитель (второй), предназначенный для выполнения управляющих движений при изменении направления движения и при торможении. Первый мускульный движитель содержит бедренный мускульный двигатель (по изобретению автора настоящего изобретения Р. Дайниса а.с. СССР 945491), который содержит опору для туловища, бедренные рычаги, крепления туловища и бедер первого мускульного двигателя. К опоре этого мускульного двигателя прикреплены один или два кронштейна,к которым шарнирами прикреплены один или два рычага плавников с жестко прикрепленными к ним плавниками. Рычаги плавников шарнирами и тягами кинематически соединены с бедренными рычагами. Изобретение обеспечивает пловцу качественно новые возможности маневрирования вследствие применения принципиально нового мускульного движителя (второго) для выполнения эффективных движений управления и торможения плечевыми плавниками. Второй мускульный движитель включает плечевые рычаги, прикрепленные эластичными креплениями к плечу (к верхней части руки) и сзади верхней частью к опоре туловища первого мускульного двигателя. Эти рычаги в верхней части скреплены между собой впереди грудной клетки общим упругим креплением. К плечевым рычагам прикреплены прямые направляющие скольжения плеча, которые непосредственно передают разнообразные движения плеча направляющим плавников. К опоре первого мускульного двигателя прикреплены шаровые шарниры, которые через регулируемые тяги на другом их конце скреплены с подвижными шаровыми шарнирами. К внешней сфере этих шаровых шарниров жестко прикреплены направляющие плавников, которые образуют кинематическую пару скольжения с плечевыми направляющими и этим обеспечивают непосредственную передачу плавникам движений, выполняемых мускулами рук - плеч. Каждый плавник содержит две сомкнутые симметричные пластины плавников, объединенные общими осями, жестко прикрепленными к внешней сфере подвижного шарового шарнира перпендикулярно относительно направляющих плавников. Сомкнутые пластины плавника легко превратить в гидродинамический тормоз, развернув, раскрыв эти пластины плавников в противоположные стороны от толчка ползуна и двух промежуточных рычагов, осуществляемого при движении плечевых направляющих. Под воздействием движения плеча вверх ползун сжимает амортизатор, который после движения плеча вниз заставляет пластины плавников снова сомкнуться и опять выполнять функции руля. Непосредственная кинематическая связь между бедрами и плавниками открывает пловцу широкие возможности мощными и резкими движениями бедер достичь наибольшей движущей вперед силы. Это позволяет в моменты резкой остановки бедер зафиксировать желаемое угловое положение плавника, что позволяет внезапно менять направление движения, его скорость и выполнять резкие повороты. Такие повороты и маневрирование могут быть выполнены еще эффективнее при использовании всех возможностей плавников как рулей или тормозов, когда, используя достаточно мощные группы мускулов плечевого пояса, пловец фиксирует плавники в разнообразных позициях поворотов и/или торможения. Сущность изобретения поясняется чертежами, где на фиг. 1 изображен первый вариант бедренного мускульного движителя пловца, содержащий два плавника и плечевой мускульный движитель; на фиг. 2 - движитель показанный на фиг. 1, вид снизу по стрелке А и разрез В-В левого плавника; на фиг. 3 - второй вариант бедренного мускульного движителя, содержащий один плавник в положении, когда правая нога пловца выпрямлена, а левая согнута, и плечевой мускульный движитель, когда плечо левой руки и плавник повернуты под углом 30 вперед; на фиг. 4 - движитель, показанный на фиг. 3, вид снизу по стрелке С; на фиг. 5 - второй вариант бедренного мускульного движителя в положении, когда обе ноги пловец двигает в согнутом положении, а рычаг плавника отклонен от начального положения на угол , и плечевой мускульный движитель, когда левый плавник с развернутыми пластинами плавника действует как гидродинамический тормоз; на фиг. 6 - левый плавник плечевого мускульного движителя, действующий как гидродинамический-1 006644 тормоз, разрез D-D. Бедренный мускульный движитель по первому варианту содержит опору 1 туловища (по а.с. СССР 945491), крепление 2 туловища, два бедренных рычага 3 с креплениями 4 бедра, две оси 5, соединяющие опору 1 туловища с бедренными рычагами 3. К опоре 1 туловища прикреплены два кронштейна 6,которые осями 7 соединены с рычагами 8 плавников, к которым прикреплены два плавника 9. Два бедренных рычага 3 осями 10 соединены с промежуточными тягами 11, которые осями 12 кинематически соединены с рычагами 8 плавника. Бедренный мускульный движитель по второму варианту также содержит опору 1 туловища (по а.с. СССР 945491), крепление 2 туловища, два бедренных рычага 3 с креплениями 4 бедер, две оси 5, соединяющие опору 1 туловища с бедренными рычагами 3. К опоре 1 туловища прикреплен кронштейн 13 и круговые направляющие 14, центр окружности которых при помощи регулировки совмещен с общей пространственной линией осей 5. Круговые направляющие 14 сопряжены кинематически с круговым ползуном 15, продолжение которого выполнено в виде кронштейна 16, который через шарнир 17 соединен с рычагом 18 плавника с закрепленным на нем плавником 19 и двумя кронштейнами 20. Концы каждого кронштейна 20 карданными шарнирами 21, карданными тягами 22 и карданными шарнирами 23 соединены с левым и правым бедренными рычагами 3. Плечевой мускульный движитель содержит плечевые рычаги 24, крепления 25 плеча, упругие крепления 26 лопаток и общее крепление 27 груди. К плечевому рычагу 24 жестко прикреплены направляющие 28 плеча. К верхней части опоры 1 туловища прикреплены шаровые шарниры 29, соединенные через регулируемые тяги 30 с шаровыми шарнирами 31. К внешней сфере 32 шаровых шарниров 31 жестко прикреплены направляющие 33 плавника, и перпендикулярно к ним присоединены оси 34 плавников, сопряженные с рычагами 35, 36 плавника. Направляющие 33 плавника образуют кинематические пары с направляющими 28 плеча и с ползуном 37, имеющим силовой контакт с амортизатором 38. Ползуны 37 через оси-шарниры 39, 40, тяги 41, 42, оси 43, 44 кинематически соединены с рычагами 35, 36 плавника, к которым прикреплены плоскости 45, 46 плавников, изготовленные из упругого материала. К концевой части опоры 1 туловища прикреплена опора 47 головы. Пловец выполняет движения плавников 9 или 19 движениями бедер. В первом варианте бедренного мускульного движителя движения бедер пловца передаются через бедренные рычаги 3, промежуточные тяги 11 рычаги 8 плавников к плавникам 9. Направления движения плавников 9 совпадают с направлениями движений бедер. Движения бедрами могут выполняться в одном и том же или в противоположных направлениях. Во втором варианте бедренного мускульного движителя движения бедер пловца через карданные шарниры 21, 23, карданные тяги 22 и кронштейны 20 передаются рычагу 18 плавника и плавнику 19. Движения бедрами могут выполняться только в противоположных направлениях. При выпрямлении левого бедра пловца плавник движется влево, при этом правое бедро должно сгибаться. При выпрямлении правого бедра пловца плавник движется вправо. Движения управления плавниками пловец выполняет движениями плеча и плечевых рычагов 24 плечевого мускульного движителя, которые через направляющие 28 плеча передают совершенно идентичные движения плавникам. Тормозящие движения пловец выполняет, поднимая вверх оба или одно плечо. Жестко скрепленные с плечами плечевые рычаги 24, а вместе с ними и направляющие 28 плеча, двигаясь вверх, достигают концевой поверхности ползуна 37 и, двигаясь дальше, толкают ползун 37, вместе с ними двигая шарниры 39, 40, тяги 41, 42, оси 43, 44, и поворачивают рычаги плавников 35, 36 и прикрепленные к ним плоскости 45, 46 плавников в развернутое положение (фиг. 6), превращая их в гидродинамический тормоз. Сила торможения полностью зависит от угла поворота плоскостей 45, 46 плавников и от угловой скорости их поворота. В исходном положении при регулировке длины тяг 30 должен быть оставлен зазор 20-30 мм между торцом направляющих 28 плеча и торцом ползуна 37. Этот зазор позволяет свободно выполнять все боковые повороты плечами, тем самым обеспечивая возможность выполнять очень разнообразные повороты плавников, изменяющие направление движения. Подняв оба или одно плечо на 25-35 мм, пловец может выполнять начальные, частично тормозящие движения, а подняв плечи на 40 мм или больше, он может выполнять только тормозящие движения. Плечевой мускульный движитель позволяет пловцу выполнять также и движущие вперед движения, совершая колебательные боковые повороты плечами около туловища. В этом случае пловец будет махать плавниками аналогично тому, как двигают своими крыльями пингвины. Пловец, двигая плавниками, может двигаться в различных направлениях: а) в направлении назад, двигая поднятые вверх руки рядом с головой; б) вперед, в направлении груди, двигая руками, отогнутыми в сторону спины; в) назад, в направлении спины, двигая руками, вытянутыми в сторону груди. Плавники 9 и 19 изготовлены из упругого материала, их упругость наименьшая в конце плавника. Поэтому при выполнении боковых движений эти края отгибаются, при этом мускульная сила бедер непосредственно превращается в движущую вперед силу по полной аналогии с эффективным действием хвостовых плавников дельфинов или рыб. Предлагаемые мускульные движители пловца могут быть эффективно использованы в спорте, на-2 006644 досуге, в исследовательских подводных работах и особенно эффективно - в спасательных работах или в других подводных работах. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Бедренный мускульный движитель пловца, включающий мускульный двигатель, содержащий опору (1) туловища, кинематически сопряженные с ним два плавника, отличающийся тем, что непосредственно к опоре (1) туловища мускульного двигателя прикреплены кронштейны (6), соединенные с осями (7) с рычагами (8) с прикрепленным к ним плавником (9), рычаги (8) плавника осями (10, 12) и тягами(11) кинематически соединены с бедренными рычагами (3) мускульного двигателя. 2. Бедренный мускульный движитель пловца, включающий мускульный двигатель, кинематически сопряженный с ним один плавник, отличающийся тем, что непосредственно к опоре (1) туловища мускульного двигателя прикреплен кронштейн (13), жестко скрепленный с круговыми направляющими (14),кинематически сопряженными с круговым ползуном (14), жестко скрепленным с кронштейном (16), который осью (17) кинематически соединен с рычагом (18) плавника и с плавником (19), а жестко скрепленные с рычагом (18) плавника кронштейны (20) через карданные шарниры (21, 23), имеющие не менее двух степеней свободы вращательных движений, и тяги (22) кинематически соединены с бедренными рычагами (3) мускульного двигателя. 3. Бедренный мускульный движитель пловца по п.1 или 2, отличающийся тем, что к опоре (1) туловища прикреплена опора (47) головы. 4. Плечевой мускульный движитель пловца, содержащий опору (1) туловища, отличающийся тем,что к передним краям опоры (1) туловища прикреплены шаровые шарниры (29), регулируемые тяги (30),шаровые шарниры (31), к внешним сферам (32) которых жестко прикреплены направляющие (33) плавника и перпендикулярные к ним оси (34) плавников, соединенные кинематически с рычагами (35, 36) плавников, с жестко закрепленными на них плоскостями (45, 46) плавников и направляющие (33) плавников кинематически сопряжены с направляющими (28) плеча, жестко скрепленными с плечевыми рычагами (24), которые скреплены упругими креплениями (25) плеча с плечом, креплениями (26) лопаток с опорой (1) туловища, креплениями (27) груди между собой, между плечевыми рычагами (24) на уровне центра плечевых суставов, с обеспечением непосредственной передачи боковых движений плеч по кинематической цепи плоскостям (45, 46) плавников, и направляющие (33) плавников кинематически сопряжены с ползуном (37) и соединенным с отжимающим его амортизатором (38), а ползун (37) через шарниры (39, 43) кинематически соединен с рычагами (35, 36) плавника, этим конструктивно обеспечивается смыкание плоскостей (45, 46) плавников от нажима амортизатора (38) или раскрытие плоскостей(45, 46) плавников от толчка плечевого рычага (24) и направляющих (28) плеч при подъеме плеча вверх,и этим же движением обеспечивается сжатие амортизатора (38).
МПК / Метки
МПК: A63B 35/00
Метки: пловца, движители, мускульные
Код ссылки
<a href="https://eas.patents.su/6-6644-muskulnye-dvizhiteli-plovca.html" rel="bookmark" title="База патентов Евразийского Союза">Мускульные движители пловца</a>
Механизм параллельного позиционирования, в частности, для обработки ,и/или манипулирования, и/или измерения
Номер патента: 4973
Опубликовано: 28.10.2004
Авторы: Сика Збинек, Баума Вацлав, Вампола Томас, Петру Франтишек, Валасек Михаэль
МПК: F16H 21/44, B23Q 1/56
Метки: обработки, позиционирования, механизм, манипулирования, частности, параллельного, измерения
Формула / Реферат:
1. Механизм параллельного позиционирования, в частности, для обработки, и/или манипулирования, и/или измерения, состоящий из платформы для транспортировки и/или манипулирования, например, инструментом, заготовкой, измерительным устройством или тому подобным, соединенной со станиной станка по меньшей мере одним позиционирующим рычагом, отличающийся тем, что платформа (3) шарнирно соединена по меньшей мере с двумя направляющими 4 скольжения...
Устройство для тренировки мышц ног
Номер патента: 4824
Опубликовано: 26.08.2004
Автор: Гладченко Александр Васильевич
МПК: A63B 23/04, A61H 1/02
Метки: мышц, ног, тренировки, устройство
Формула / Реферат:
Устройство для тренировки мышц ног, содержащее опору для спины, две площадки для ног, установленные с возможностью изменения угла между ними, и связанное с площадками для ног средство нагружения, отличающееся тем, что опора для спины имеет вертикальные направляющие, выполненные с возможностью изменения высоты установки опоры, площадки для ног шарнирно соединены одна с другой и имеют элементы для фиксации коленных суставов, а средство нагружения...
Предыдущий патент: Ёмкость
Следующий патент: Производные аминофталазинона, активные как ингибиторы киназ, способ их получения и содержащие их фармацевтические композиции
Случайный патент: Быстро дезинтегрирующая таблетка метилцеллюлозы и способы ее получения