Способ снижения накапливающейся ошибки синхронизации в часах с помощью подстройки частоты генератора
Формула / Реферат
1. Способ коррекции ошибок отсчета времени часов, работающих от генератора, включающий
определение в выбранные моменты времени, посредством приема сигнала эталонного времени, ошибки отсчета времени часов и/или расхождения частот указанного и эталонного генераторов;
определение изменения ошибки отсчета времени и/или расхождения частот между первым и вторым моментами приемов сигналов эталонного времени, и
подстройку частоты генератора, которую осуществляют таким образом, чтобы, по существу, устранить накапливающуюся ошибку отсчета времени между вторым моментом приема сигнала эталонного времени и выбранным моментом приема сигнала эталонного времени.
2. Способ по п.1, отличающийся тем, что включает измерение температуры пьезокристалла, связанного с генератором, и подстройку частоты генератора в зависимости от измеренной температуры.
3. Способ по п.1, отличающийся тем, что сигнал эталонного времени включает сигналы от спутника глобальной системы позиционирования.
4. Способ по п.1, отличающийся тем, что подстройку частоты выполняют через выбранный период времени.
5. Способ по п.4, отличающийся тем, что скорость изменения подстройки, максимальную амплитуду подстройки и протяженность выбранного периода времени выбирают на основе величины ошибки отсчета времени.
6. Способ по п.4, отличающийся тем, что подстройка частоты включает синусоидальное изменение частоты генератора, причем среднее значение синусоиды выбирают так, чтобы свести накапливающуюся ошибку отсчета времени, по существу, к нулю.

Текст
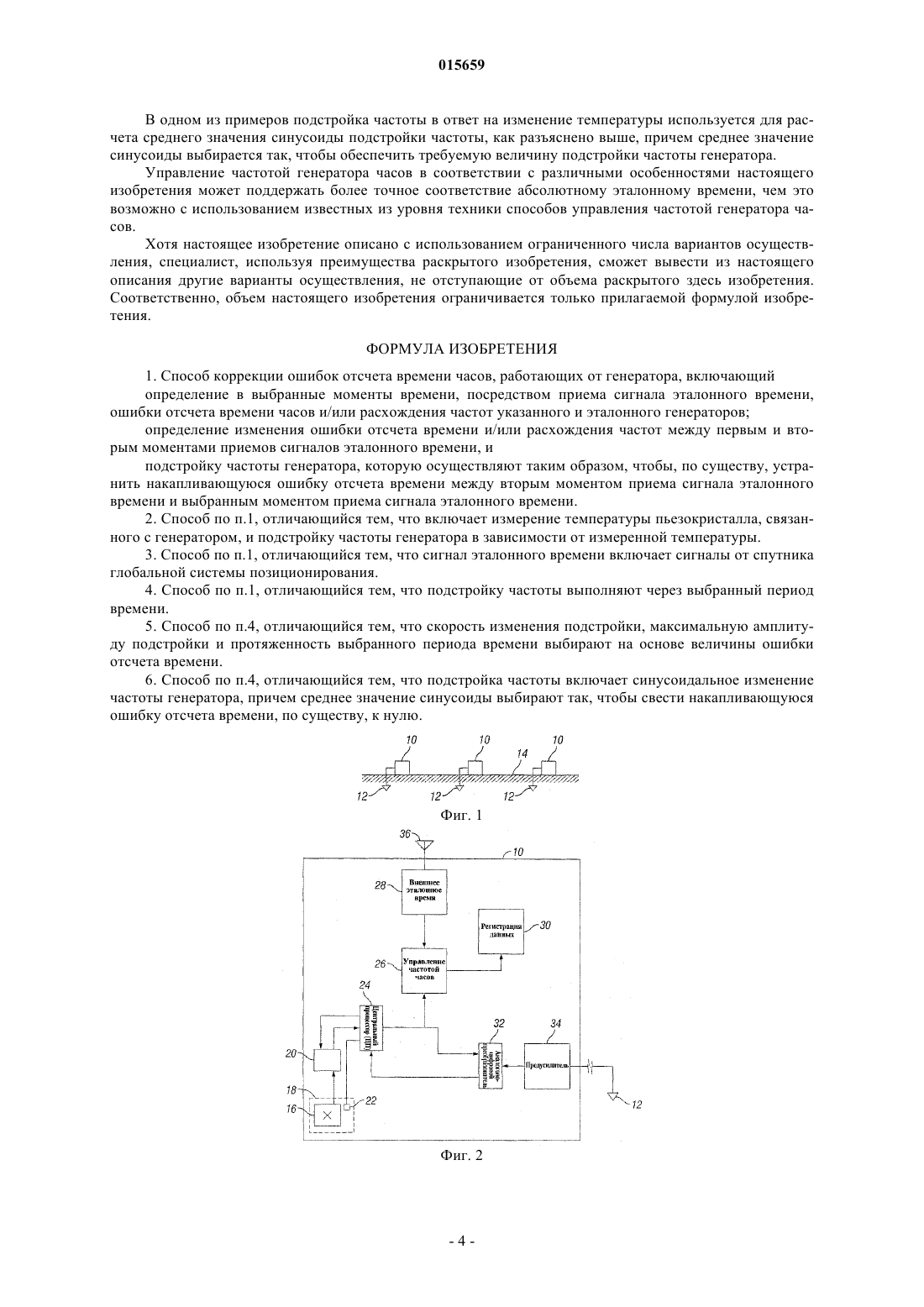
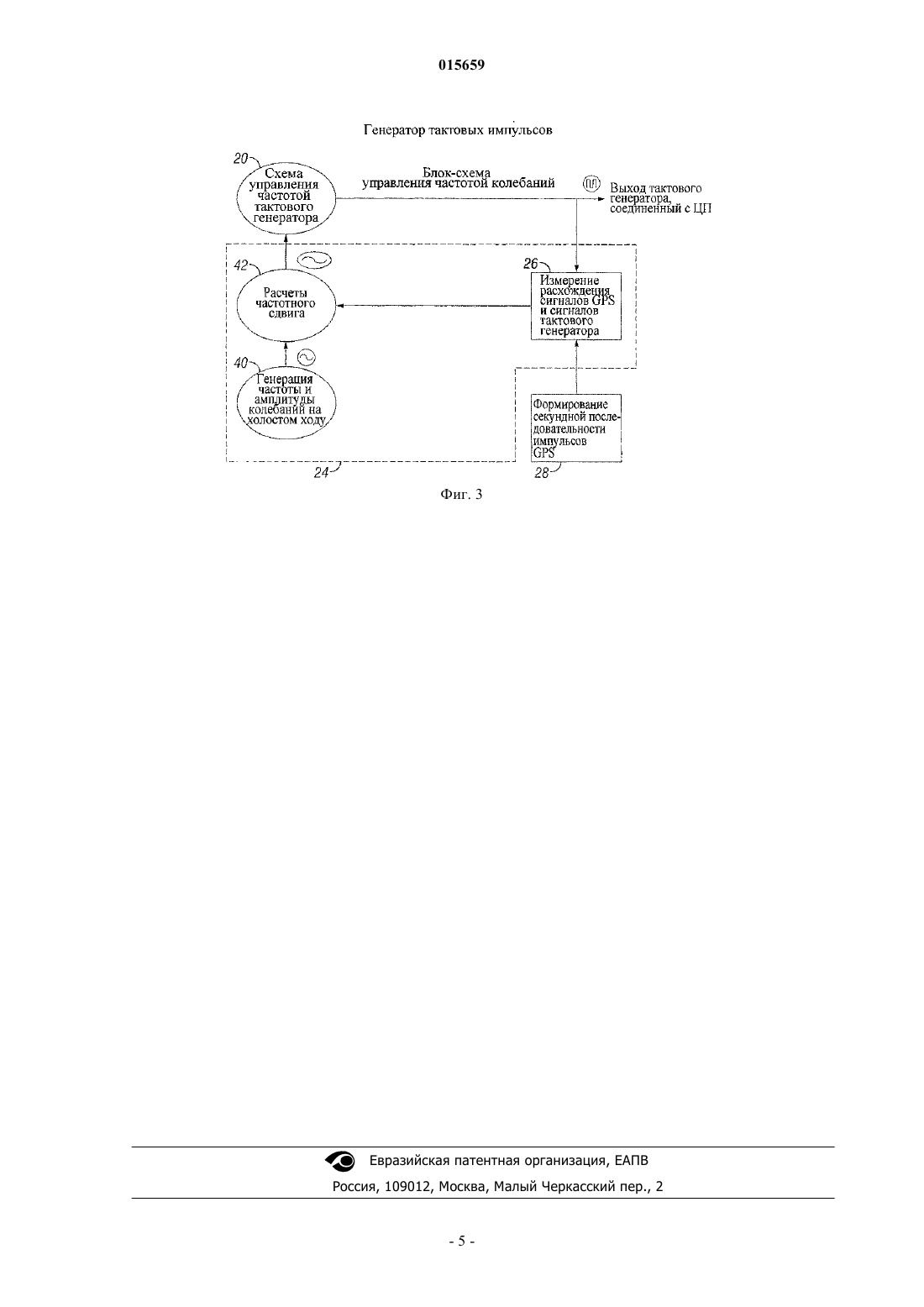
ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ЕВРАЗИЙСКОМУ ПАТЕНТУ Дата публикации и выдачи патента СПОСОБ СНИЖЕНИЯ НАКАПЛИВАЮЩЕЙСЯ ОШИБКИ СИНХРОНИЗАЦИИ В ЧАСАХ С ПОМОЩЬЮ ПОДСТРОЙКИ ЧАСТОТЫ ГЕНЕРАТОРА Способ коррекции ошибок отсчета времени часов, работающих от генератора, согласно изобретению включает определение в выбранные моменты времени, посредством приема сигнала эталонного времени, ошибки отсчета времени часов и/или расхождения частот указанного и эталонного генераторов. Определяют изменение ошибки отсчета времени и/или расхождение частот между первым и вторым моментами приемов сигналов эталонного времени. Частоту генератора подстраивают так, чтобы, по существу, устранить накапливающуюся ошибку отсчета времени между вторым моментом приема сигнала эталонного времени и выбранным моментом приема сигнала эталонного времени. Скотт Гари Ли, Драйер Джозеф Эрнест (US) Хмара М.В. (RU) 015659 Область техники, к которой относится изобретение Изобретение в целом относится к области генераторов, применяемых для управления хронированием в электронных схемах. Изобретение в особенности относится к системам управления частотой генератора, предназначенным для снижения накапливающейся ошибки хронирования. Предшествующий уровень техники Для временной привязки записей данных используются определенные типы электронных приборов. К таким устройствам относятся, например, системы записи сейсмограмм. Эти системы осуществляют записи, привязанные к времени приема сейсмических сигналов каждым из сейсмодатчиков, развернутых по выбранной схеме расположения на поверхности земли или в слое воды. Как правило, эти записи сигналов привязываются ко времени возбуждения источника сейсмических волн. Эти записи сигналов могут осуществляться центрально расположенной одиночной записывающей системой. В других случаях могут использоваться различные автономно функционирующие записывающие устройства. В этих случаях важна синхронизация автономных записывающих устройств друг с другом и с заданным эталоном времени. Способы синхронизации таких автономно функционирующих устройств могут включать периодический прием сигнала времени от спутника глобальной системы позиционирования (GPS: global positioning system - глобальная спутниковая система позиционирования). Другой способ синхронизации может включать периодическое подключение автономного записывающего устройства к эталону времени, генерируемому генератором тактовых импульсов. Вне зависимости от способа, применяемого для синхронизации автономно действующего записывающего устройства с другим устройством, важно сохранять точное хронирование записываемых оцифрованных выборок полезных сигналов в интервалах между синхронизациями. Точное хронирование можно поддерживать, например, применяя кварцевые генераторы с подсоединенной к ним схемой управления частотой. Специалистам в области применения таких кварцевых генераторов известно, как поддерживать постоянные условия среды, окружающей кварцевый пьезокристалл. Однако даже при использовании указанных средств, повышающих точность хронирования, в случае продолжительных периодов времени между синхронизациями возможное отклонение частоты генератора от эталонной частоты может привести к накапливающейся ошибке хронирования записываемых сигналов. Сущность изобретения Способ коррекции ошибок отсчета времени часов, работающих от генератора, согласно изобретению включает определение в выбранные моменты времени, посредством приема сигнала эталонного времени, ошибки отсчета времени часов и/или расхождения частот указанного и эталонного генераторов. Определяют изменение ошибки отсчета времени и/или расхождение частот между первым и вторым моментами приемов сигналов эталонного времени. Частоту генератора подстраивают так, чтобы по существу устранить накапливающуюся ошибку отсчета времени между вторым моментом приема сигнала эталонного времени и выбранным моментом приема сигнала эталонного времени. Другие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Краткий перечень фигур чертежей На фиг. 1 изображена для примера система сбора данных, в которой может быть применено управление частотой часов согласно настоящему изобретению. На фиг. 2 более подробно изображено для примера устройство регистрации данных, соответствующее фиг. 1. На фиг. 3 изображено для примера устройство подстройки частоты часов. Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 схематически изображена для примера система регистрации данных, в которой может быть применено управление частотой часов согласно настоящему изобретению. Система регистрации данных в этом примере может быть системой записи сейсмических данных, предназначенной для регистрации сейсмических сигналов, приходящих из геологической среды. Эта система записи данных может включать ряд сейсмодатчиков 12, например геофонов, акселерометров или любых иных известных сейсмодатчиков, расположенных на расстоянии друг от друга вблизи поверхности 14. Каждый сейсмодатчик 12 может быть подсоединен к регистратору данных 10. В этом примере каждый регистратор данных 10 должен работать независимо от других регистраторов данных 10. Эти регистраторы данных 10 предназначены для хронированной записи сигналов, принятых соответствующими сейсмодатчиками 12. Как правило, такое хронирование осуществляется с привязкой к времени возбуждения источника сейсмических волн (не показан), но возможна и привязка к любому иному опорному времени. Система, изображенная на фиг. 1, особенно подходит для применения управления частотой часов согласно настоящему изобретению вследствие важности синхронизации данных, записанных соответствующими регистраторами данных 10, относительно выбранной временной привязки. Специалистам известно, что ошибка синхронизации различных регистраторов данных может привести к снижению качества полученных по сейсмическим данным изображений геологической среды. На фиг. 2 схематически, но более подробно изображено для примера устройство регистрации дан-1 015659 ных, соответствующее фиг. 1. В этом примере источником эталонного времени для всех операций, выполняемых в регистраторе данных 10, может быть система часов с задающим генератором. Эта система часов может включать кварцевый генератор с пьезокристаллом 16. Пьезокристалл 16 предпочтительно располагается в изолированной и/или терморегулируемой камере 18. Для измерения температуры внутри камеры 18 в ней может располагаться термочувствительный элемент 22. Сигнал термочувствительного элемента 22 может подаваться в центральный процессор (CPU: central processor unit - центральный процессор) 24, в качестве которого может использоваться микропроцессорный контроллер. Пьезокристалл 16 вибрирует с частотой, зависящей от его внутреннего строения и окружающих условий, в частности от температуры. Пьезокристалл 16 соединен с генераторной схемой 20 хорошо известного специалистам типа. Такая генераторная схема 20 может включать также цепь управления частотой, чтобы абсолютную выходную частоту генератора 20 можно было изменять при неизменной частоте вибраций пьезокристалла 16. Выходной сигнал генератора 20 может включать импульсы, принимаемые CPU 24, в котором по количеству принятых импульсов может быть рассчитано время, прошедшее между импульсами. Один из вариантов использования измерений температуры для подстройки частоты генератора будет разъяснен ниже со ссылкой на фиг. 3. Центральный процессор CPU 24 может быть выполнен так, чтобы, используя выходной сигнал генератора 20, генерировать тактовые сигналы для работы тех или иных устройств, находящихся в регистраторе данных 10. К числу таких устройств могут относиться аналогово-цифровой преобразователь(ADC: analog to digital converter - аналогово-цифровой преобразователь) 32 и накопитель 30 большого объема, например, оперативное запоминающее устройство, флэш-память, жесткий диск или иной накопитель данных, известный специалистам. Сигналы от сейсмодатчика 12 могут быть поданы на вход предусилителя 34. Выход предусилителя 34 может быть соединен с аналоговым входом ADC 32. Цифровые слова на выходе ADC 32, представляющие амплитуду сигнала сейсмодатчика 12 при дискретных значениях времени (индивидуальные выборки по времени), могут быть поданы на CPU 24 для временной привязки и передачи на накопитель 30. Данные, записанные в накопителе 30, могут содержать связанную с ними информацию временной привязки, переданную с CPU 24; в других случаях информация об абсолютном времени, связанном с временем получения каждой выборки данных, может быть выведена из того факта, что каждая выборка должна осуществляться по истечении заранее заданного интервала времени после ближайшей предшествующей выборки. Этот заранее заданный интервал времени обратно пропорционален скорости следования выборок. Для того чтобы более точно привязать эту информацию о времени к абсолютному эталонному времени, например к сигналам спутников GPS, регистратор данных 10 может включать приемник сигнала внешнего эталонного времени 28, соединенный с антенной 36. В настоящем примере приемник сигнала эталонного времени 28 может быть выполнен так, чтобы он принимал и детектировал сигналы от переносного устройства (не показано), например от ручного устройства, которое само получает сигналы абсолютного эталонного времени от спутника GPS или другого эталона абсолютного времени. Приемник сигнала эталонного времени 28 может также быть выполнен так, чтобы он непосредственно детектировал сигналы GPS. Назначение такого приемника сигнала эталонного времени 28 в том, чтобы дать возможность регистратору данных 10 работать в таких условиях окружающей среды, которые исключают непрерывный прием сигналов спутника GPS или иных сигналов внешнего эталонного времени, либо при таком расположении регистратора данных 10, когда прием указанных сигналов вообще невозможен. Предполагается, что регистратор данных 10 может периодически получать сигналы внешнего эталонного времени (например, от оператора системы, использующего вышеупомянутое ручное устройство), для того чтобы могла быть определена и введена соответствующая корректировка системных часов регистратора данных 10. Сигналы эталонного времени, например, в случае использования сигналов GPS, могут включать сигнал эталонной тактовой частоты, или последовательные сигналы абсолютного эталонного времени, которые могут быть использованы для генерации эталонной частоты, или ряд импульсов от приемника эталонного сигнала 28 с известным и существенно стабильным интервалом времени между последовательными импульсами. В настоящем примере для определения расхождения выходной частоты генератора 20 и указанной эталонной частоты может быть использован компаратор 26 тактовых частот. Расхождения между частотой генератора 20 и эталонной частотой могут быть использованы, например, вCPU 24 для формирования управляющего сигнала, подаваемого на генератор 20 для соответствующей подстройки частоты генератора. Интервал времени между импульсами внешнего эталонного времени может быть сопоставлен с интервалом времени между эквивалентными событиями в схеме регистратора данных 10, и таким образом может быть определена ошибка временного интервала между тактовыми импульсами схемы регистратора данных относительно временного интервала между импульсами внешнего эталонного времени. На фиг. 3 изображена для примера функциональная схема, которая может быть реализована в CPU 24, или в виде отдельных дискретных элементов управления частотой генератора согласно настоящему изобретению, или в составе специализированной интегральной микросхемы (ASIC: application specificintegrated circuit - специализированная интегральная микросхема). Как было разъяснено выше, сигналы внешнего эталонного времени могут быть приняты в выбранные моменты времени приемником сигнала-2 015659 эталонного времени 28. Эти сигналы внешнего эталонного времени могут включать определенное количество синхронизирующих, или тактовых, или аналогичных импульсов в заранее заданном интервале абсолютного времени, например, в одну секунду. Такое определенное количество синхронизирующих импульсов в заранее заданном интервале времени может быть использовано для выделения частотной информации из сигналов внешнего эталонного времени, как было разъяснено выше, с целью получения эталонной частоты, или же ошибка временного интервала синхронизируемых событий может быть, как было разъяснено выше, использована для выведения ошибки частоты внутреннего генератора регистратора данных. Указанная эталонная частота может быть сопоставлена с частотой генератора в блоке 26 для формирования сигнала расхождения частот. Так, например, предполагается, что отклонение временной информации сигналов GPS от такого абсолютного стандарта, как всемирное время (GMT: GreenwichMean Time - всемирное время), составляет менее 1 мкс. Как было разъяснено выше, время может быть рассчитано в CPU 24 по выходному сигналу генератора 20. Когда приняты сигналы внешнего эталонного времени, появляется возможность сформировать сигнал рассогласования времен в блоке 26. Определяется расхождение частот генератора 20 и сигналов внешнего эталонного времени; результат подается в CPU 24. Это расхождение частот может быть использовано в блоке 42 для определения текущего среднего значения расхождения частот генератора 20 и сигналов эталонного времени. Период времени для определения этого текущего среднего значения может быть установлен на нужную величину, связанную с эксплуатацией регистратора данных (10 на фиг. 2). Например, текущее среднее может вычисляться за время, приблизительно равное ожидаемому интервалу между приемом последовательных сигналов внешнего эталонного времени. По расхождению частот, определенному как указано выше, может быть определена тенденция изменения расхождения частот в зависимости от времени. Исходя из этой тенденции изменения, можно определить корректирующий сигнал обратной связи. Этот сигнал обратной связи может быть использован в CPU, как показано в блоке 42, для формирования такого сигнала коррекции частоты генератора 20,чтобы ожидаемая накапливающаяся ошибка отсчета времени между последовательными приемами сигналов эталонного времени была по существу нулевой. Процесс подстройки частоты генератора предпочтительно выполнять с выбранной периодичностью во избежание ввода ступенчатого изменения или заметного сдвига времени в процессе подстройки. В качестве базового периода может быть использовано, например, ожидаемое время между последовательными приемами сигналов внешнего эталонного времени. Частоту генератора 20 можно подстроить так,чтобы величина подстройки была нулевой в начале базового периода и постепенно менялась в течение выбранной части базового периода. Подстройку частоты можно вводить так, чтобы обеспечиваемая этой подстройкой ожидаемая коррекция суммарного времени, по существу, сводила к нулю предсказанную ошибку отсчета времени между временем, рассчитанным в CPU 24 по сигналу времени от генератора 20,и эталонным временем от сигналов внешнего эталонного времени. В одном из примеров график подстройки частоты генератора может быть представлен в форме волны, начинающейся с нулевого значения в начале базового периода и заканчивающейся также нулевым значением, после захода в течение периода коррекции в области как положительных, так и отрицательных значений. Такая волновая форма может состоять из линейных или криволинейных частей, в зависимости от характеристик конкретного генератора. Часть базового периода, в течение которой вводится подстройка, финальное значение и форма графика подстройки частоты могут быть исходно определены посредством замеров ошибки отсчета времени, рассчитанного по сигналу генератора 20, относительно сигналов эталонного времени. В одном из примеров волновая форма графика подстройки частоты может быть синусоидальной. Эта синусоида будет иметь такой сдвиг, или смещение (среднее значение), которое соответствует коррекции частоты генератора. Амплитуда синусоиды должна быть выбрана так, чтобы абсолютная частота генератора в течение базового периода как увеличивалась, так и уменьшалась относительно частоты генератора в начале базового периода. Среднее значение синусоиды будет связано с количественным изменением частоты генератора, требуемым для сведения в течение базового периода суммарной ошибки хронирования, по существу, к нулю. Возможным преимуществом использования синусоидальной формы графика подстройки частоты, при которой частота генератора как увеличивается, так и уменьшается относительно исходной частоты, является снижение возможной накапливающейся ошибки хронирования в течение базового периода. Возвратимся к фиг. 2; в некоторых примерах выход термочувствительного элемента 22 может быть согласован с накапливающейся ошибкой хронирования, определенной как разъяснено выше, для того чтобы связать изменение частоты генератора с кажущейся температурой пьезокристалла. В этих примерах такое согласование может быть выполнено в CPU 24. После осуществления выбранного числа замеров ошибки хронирования (например, посредством приема сигналов эталонного времени), может быть определена связь частоты генератора с температурой пьезокристалла. Кроме того, CPU 24 может быть выполнен так, чтобы подстраивать частоту генератора 20 в ответ на фиксируемые изменения температуры с целью уменьшения температурно-зависимых вариаций частоты генератора 20 и связанной с ними накапливающейся ошибки хронирования.-3 015659 В одном из примеров подстройка частоты в ответ на изменение температуры используется для расчета среднего значения синусоиды подстройки частоты, как разъяснено выше, причем среднее значение синусоиды выбирается так, чтобы обеспечить требуемую величину подстройки частоты генератора. Управление частотой генератора часов в соответствии с различными особенностями настоящего изобретения может поддержать более точное соответствие абсолютному эталонному времени, чем это возможно с использованием известных из уровня техники способов управления частотой генератора часов. Хотя настоящее изобретение описано с использованием ограниченного числа вариантов осуществления, специалист, используя преимущества раскрытого изобретения, сможет вывести из настоящего описания другие варианты осуществления, не отступающие от объема раскрытого здесь изобретения. Соответственно, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ коррекции ошибок отсчета времени часов, работающих от генератора, включающий определение в выбранные моменты времени, посредством приема сигнала эталонного времени,ошибки отсчета времени часов и/или расхождения частот указанного и эталонного генераторов; определение изменения ошибки отсчета времени и/или расхождения частот между первым и вторым моментами приемов сигналов эталонного времени, и подстройку частоты генератора, которую осуществляют таким образом, чтобы, по существу, устранить накапливающуюся ошибку отсчета времени между вторым моментом приема сигнала эталонного времени и выбранным моментом приема сигнала эталонного времени. 2. Способ по п.1, отличающийся тем, что включает измерение температуры пьезокристалла, связанного с генератором, и подстройку частоты генератора в зависимости от измеренной температуры. 3. Способ по п.1, отличающийся тем, что сигнал эталонного времени включает сигналы от спутника глобальной системы позиционирования. 4. Способ по п.1, отличающийся тем, что подстройку частоты выполняют через выбранный период времени. 5. Способ по п.4, отличающийся тем, что скорость изменения подстройки, максимальную амплитуду подстройки и протяженность выбранного периода времени выбирают на основе величины ошибки отсчета времени. 6. Способ по п.4, отличающийся тем, что подстройка частоты включает синусоидальное изменение частоты генератора, причем среднее значение синусоиды выбирают так, чтобы свести накапливающуюся ошибку отсчета времени, по существу, к нулю.
МПК / Метки
МПК: G04G 7/00
Метки: ошибки, генератора, часах, помощью, подстройки, накапливающейся, способ, частоты, синхронизации, снижения
Код ссылки
<a href="https://eas.patents.su/6-15659-sposob-snizheniya-nakaplivayushhejjsya-oshibki-sinhronizacii-v-chasah-s-pomoshhyu-podstrojjki-chastoty-generatora.html" rel="bookmark" title="База патентов Евразийского Союза">Способ снижения накапливающейся ошибки синхронизации в часах с помощью подстройки частоты генератора</a>
Способ и устройство для точной синхронизации частоты в системах демодуляции множества несущих
Номер патента: 2748
Опубликовано: 29.08.2002
Авторы: Буххольц Штефан, Эберляйн Эрнст, Бадри Сабах, Герхойзер Хайнц, Хойбергер Альберт, Липп Штефан
МПК: H04L 27/26
Метки: частоты, устройство, несущих, точной, системах, демодуляции, способ, множества, синхронизации
Формула / Реферат:
1. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающий дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы а)...
Способ плазменной резки материалов, в частности, с помощью генератора с настроенным высокочастотным электромагнитным полем
Номер патента: 2935
Опубликовано: 31.10.2002
Автор: Фуго Ричард Дж.
МПК: B23K 10/00
Метки: генератора, полем, частности, электромагнитным, помощью, настроенным, способ, плазменной, высокочастотным, резки, материалов
Формула / Реферат:
1. Способ резки материалов с использованием плазмы, состоящий из следующих этапов: подачи высокочастотных электромагнитных колебаний к вершине активного режущего передающего электрода путем использования электронной системы, в состав которой входят генератор импульсов высокочастотного диапазона и усилитель мощности для формирования электромагнитного поля снаружи упомянутой вершины активного режущего передающего электрода и создания облака...
Способ содействия имплантации и/или снижения частоты выкидышей и набор для его осуществления
Номер патента: 9330
Опубликовано: 28.12.2007
Автор: Менезо Ив
МПК: A61K 38/24, A61P 15/08
Метки: содействия, способ, осуществления, частоты, имплантации, набор, выкидышей, снижения
Формула / Реферат:
1. Способ содействия имплантации и/или снижению частоты выкидышей в сочетании с контролируемой гиперстимуляцией яичников (КГЯ) у пациента-человека с использованием фолликулостимулирующего гормона (ФСГ) или его аналога, согласно которому, начиная до 10-го дня после начала лечения ФСГ, вводят лекарственное средство на основе человеческого хорионического гонадотропина (чХГ) или его аналога. 2. Способ по п.1, согласно которому указанное...
Устройство для плазменного надреза материи с помощью резонансного генератора электромагнитного поля высокочастотного диапазона
Номер патента: 3761
Опубликовано: 28.08.2003
Авторы: Фуго Ричард Дж., Коксио Дамиан
МПК: A61B 18/12
Метки: поля, плазменного, диапазона, высокочастотного, помощью, резонансного, устройство, генератора, электромагнитного, материи, надреза
Формула / Реферат:
1. Устройство для плазменного надреза материи, содержащее средство формирования высокочастотных электромагнитных колебаний, средство для подачи их к вершине режущего передающего электрода, средство для поддержания облака плазмы, окружающего вершину упомянутого электрода, созданного при возбуждении элементарных частиц вдоль границы раздела между вершиной режущего передающего электрода и надрезаемой материей. 2. Устройство по п.1, отличающееся...
Применение лютеинизирующего гормона человека, в том числе в сочетании с фолликулостимулирующим гормоном, для содействия имплантации и/или снижения частоты выкидышей
Номер патента: 9279
Опубликовано: 28.12.2007
Автор: Менезо Ив
МПК: A61P 15/08, A61K 38/24
Метки: фолликулостимулирующим, содействия, применение, сочетании, человека, имплантации, числе, снижения, выкидышей, том, лютеинизирующего, гормоном, частоты, гормона
Формула / Реферат:
1. Применение человеческого лютеинизирующего гормона (чЛГ) или его аналога для изготовления лекарственного средства для применения в сочетании с контролируемой гиперстимуляцией яичников (КГЯ) у человека-пациента с использованием фолликулостимулирующего гормона (ФСГ) или его аналога для содействия имплантации и/или снижения частоты выкидышей. 2. Применение по п.1, согласно которому пациентом является человек в возрасте по меньшей мере 35 лет. 3....
Предыдущий патент: Предмет одежды типа трусов
Следующий патент: Стелька для обуви