Бортовая система управления блокировками дифференциалов многоприводной колесной машины
Номер патента: 23385
Опубликовано: 31.05.2016
Авторы: Дубовик Дмитрий Александрович, Мыльников Евгений Витальевич, Белоус Михаил Михайлович
Формула / Реферат
1. Бортовая система управления блокировками дифференциалов многоприводной колесной машины, содержащая идентичные между собой электронные блоки управления по числу колесных баз, каждый из которых связан с соответствующими датчиками скоростей вращения ведущих колес и датчиками блокировки дифференциалов, причем все упомянутые блоки управления связаны между собой информационно-управляющей шиной, при этом система дополнительно содержит элемент ИЛИ, входы которого связаны с каждым из электронных блоков управления, а выход - с межтележечным дифференциалом.
2. Система по п.1, отличающаяся тем, что в качестве колесных баз служат ведущие мосты и/или тележки, объединяющие пары ведущих мостов.

Текст
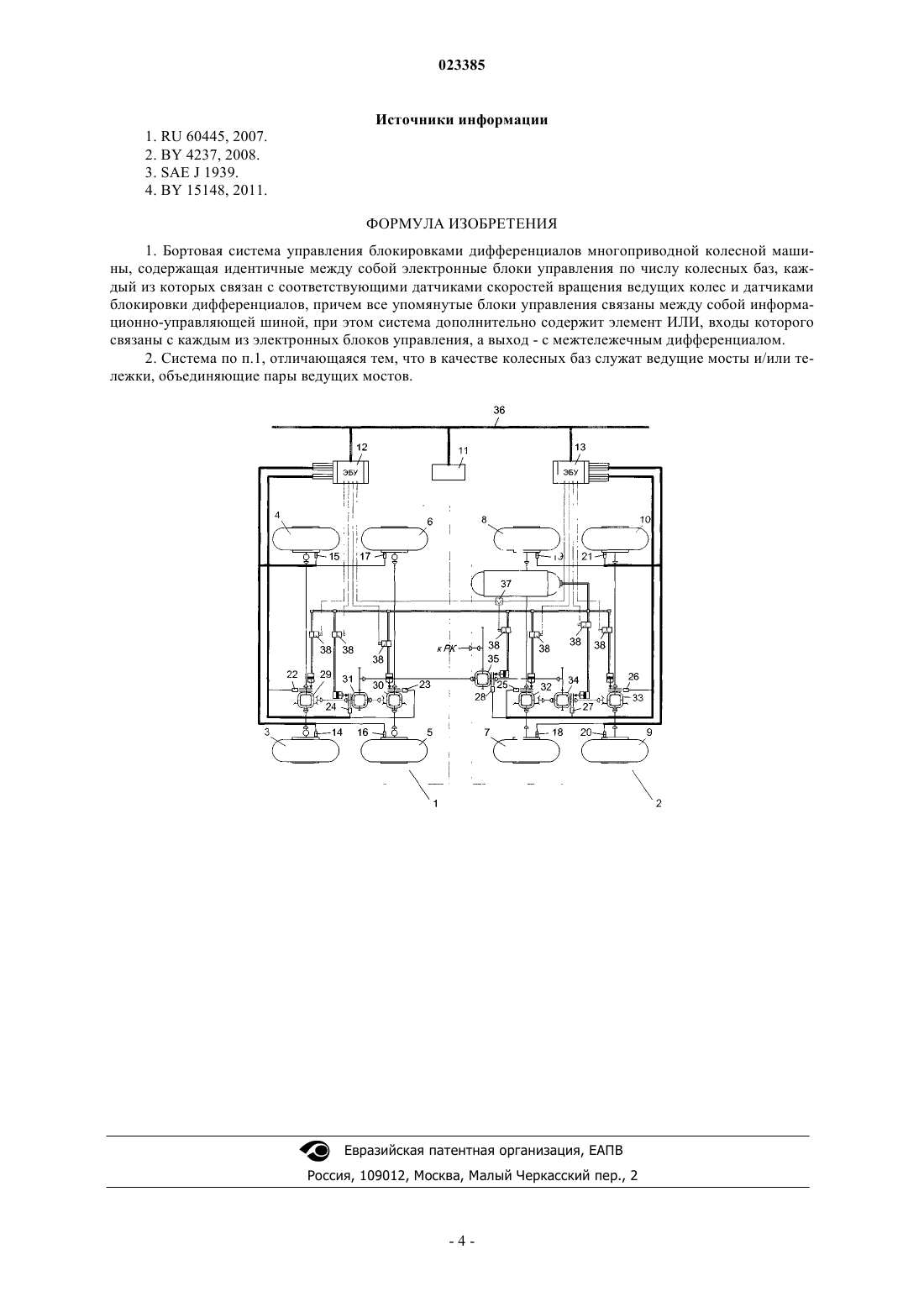
БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ БЛОКИРОВКАМИ ДИФФЕРЕНЦИАЛОВ МНОГОПРИВОДНОЙ КОЛЕСНОЙ МАШИНЫ Изобретение относится к машиностроению и может быть использовано в качестве бортовой системы управления блокировками дифференциалов многоприводных колесных машин. Задачей настоящего изобретения является повышение устойчивости работы и эксплуатационной надежности бортовой системы управления блокировками дифференциалов колесных машин, а также унификация компонентов данной системы. Решение поставленной задачи достигается тем, что бортовая система управления блокировками дифференциалов многоприводной колесной машины содержит идентичные между собой электронные блоки управления по числу колесных баз, каждый из которых связан с соответствующими датчиками скоростей вращения ведущих колес и датчиками блокировки дифференциалов, причем все упомянутые блоки управления связаны между собой информационно-управляющей шиной, при этом система дополнительно содержит элемент ИЛИ, входы которого связаны с каждым из электронных блоков управления, а выход - с межтележечным дифференциалом. В качестве колесных баз могут служить ведущие мосты и/или тележки, объединяющие пары ведущих мостов.(71)(73) Заявитель и патентовладелец: ГОСУДАРСТВЕННОЕ НАУЧНОЕ УЧРЕЖДЕНИЕ "ОБЪЕДИНЕННЫЙ ИНСТИТУТ МАШИНОСТРОЕНИЯ НАЦИОНАЛЬНОЙ АКАДЕМИИ НАУК БЕЛАРУСИ" (BY) Изобретение относится к машиностроению и может быть использовано в качестве бортовой системы управления блокировками дифференциалов многоприводных колесных машин: автомобильных и тракторных поездов с активными прицепами и полуприцепами, автотракторной, сельскохозяйственной,дорожно-строительной и специальной техники. Известна система управления блокировками дифференциалов колесных машин [1], содержащая электронный блок управления, датчик скорости движения колесной машины, электропневмоклапаны,датчики скоростей вращения, датчики блокировки дифференциалов и индикаторные лампы. Причем,датчики скоростей вращения установлены в ступицах ведущих колес. Такое исполнение системы управления блокировками дифференциалов позволяет использовать роторы (элементы импульсных сигналов) датчиков скоростей вращения колес с большими размерами,обеспечивающими большее число зубьев (источников импульсных сигналов) и повышенную точность измерения частоты вращения колес. Недостатком данной системы является то, что в случае выхода из строя электронного блока управления она полностью теряет свою работоспособность. Наиболее близким аналогом к предлагаемому техническому решению является система управления блокировками дифференциалов колесной машины [2], содержащая электронный блок управления, электропневмоклапаны, датчики скоростей вращения, датчики блокировки дифференциалов, датчик поворота управляемых колес и индикаторные лампы. В качестве датчика скорости движения колесной машины служат датчики вращения ведущих колес. Такое исполнение системы управления блокировками дифференциалов позволяет упростить элементную базу при сохранении функциональных свойств системы, а также расширить их с целью обеспечения удовлетворительной управляемости колесных машин в результате разблокирования дифференциалов при достижении текущих значений углов поворота управляемых колес заданных пороговых величин. Недостатком данной системы является то, что в случае выхода из строя электронного блока управления она полностью теряет свою работоспособность. Вторым существенным недостатком данной системы является то, что она может применяться только для машины с четырьмя ведущими мостами. Для машин с другим числом ведущих мостов требуются соответствующее специализированное исполнение и производство разных систем. Задачей настоящего изобретения является повышение устойчивости работы и эксплуатационной надежности бортовой системы управления блокировками дифференциалов колесных машин, а также повышение унификации компонентов данной системы. Решение поставленной задачи достигается тем, что бортовая система управления блокировками дифференциалов многоприводной колесной машины содержит идентичные между собой электронные блоки управления - по числу колесных баз, каждый из которых связан с соответствующими датчиками скоростей вращения ведущих колес и датчиками блокировки дифференциалов, причем все упомянутые блоки управления связаны между собой информационно-управляющей шиной. В качестве колесных баз могут служить ведущие мосты и/или тележки, объединяющие пары ведущих мостов. Для машин с нечетным числом ведущих мостов в качестве колесных баз могут служить сочетания ведущих мостов и тележек, объединяющих пары ведущих мостов: для машины с тремя ведущими мостами - ведущий мост и тележка, объединяющая пару ведущих мостов; для машины с пятью ведущими мостами - ведущий мост и две тележки, объединяющие пары ведущих мостов, или три ведущих моста и тележка, объединяющая пару ведущих мостов; и т.д. Бортовая система управления блокировками дифференциалов многоприводной колесной машины может дополнительно содержать элемент ИЛИ, входы которого связаны с каждым из электронных блоков управления, а выход - с межтележечным дифференциалом. Сущность изобретения поясняется структурной схемой бортовой системы управления блокировками дифференциалов полноприводной четырехосной колесной машины МЗКТ, приведенной на фигуре. Полноприводная четырехосная колесная машина представляется сочетанием двух тележек - колесных баз: передней тележки 1 и задней тележки 2. Каждая тележка объединяет два ведущих моста: передняя тележка 1 - два управляемых моста с ведущими колесами 3, 4, 5, 6, задняя тележка 2 - два неуправляемых моста с ведущими колесами 7, 8, 9, 10. Бортовая система управления блокировками дифференциалов полноприводной четырехосной колесной машины содержит панель 11 приборов с органами управления и индикаторными лампами (не показаны), два электронных блока 12 и 13 управления, идентичные между собой, датчики 14, 15, 16, 17,18, 19, 20, 21 скоростей вращения ведущих колес 3, 4, 5, 6, 7, 8, 9, 10, датчики 22, 23, 24, 25, 26, 27, 28 блокировки управляемых межколесного дифференциала 29 первого моста передней тележки 1, - межколесного дифференциала 30 второго моста передней тележки 1, межосевого дифференциала 31 передней тележки 1, межколесного дифференциала 32 первого моста задней тележки 2, межколесного дифференциала 33 второго моста задней тележки 2, межосевого дифференциала 34 задней тележки 2, межтележечного дифференциала 35 в раздаточной коробке (не показана) соответственно. Электронный блок 12 управления передней тележки 1 и электронный блок 13 управления задней тележки 2 связаны между собой и с панелью 11 приборов информационно-управляющей шиной 36, например, реализованной в соответствии с рекомендациями практического применения [3]. Электронные блоки 12, 13 управления связа-1 023385 ны с входами элемента ИЛИ 37, а выход последнего - межтележечного дифференциала 35 через соответствующий управляющий клапан 38. Электронные блоки 12, 13 управления имеют идентичные между собой структурные составляющие и алгоритмы управления. Их входы связаны с соответствующими датчиками 14, 15, 16, 17, 18, 19, 20, 21 скоростей вращения ведущих колес 3, 4, 5, 6, 7, 8, 9, 10, с датчиками 22, 23, 24, 25, 26, 27, 28 блокировки управляемых межколесного дифференциала 29 первого моста передней тележки 1, межколесного дифференциала 30 второго моста передней тележки 1, межосевого дифференциала 31 передней тележки 1,межколесного дифференциала 32 первого моста задней тележки 2, межколесного дифференциала 33 второго моста задней тележки 2, межосевого дифференциала 34 задней тележки 2, межтележечного дифференциала 35 в раздаточной коробке (РК) соответственно. Электронные блоки 12, 13 управления и панель 11 приборов имеют возможность подключения других датчиков и исполнительных элементов, в том числе датчика поворота рулевого колеса, крана центральной накачки шин и т.д. В случае наличия последних идентичные алгоритмы управления электронных блоков 12, 13 управления учитывают сигналы этих датчиков и выдают управляющие сигналы на соответствующие исполнительные элементы. Бортовая система управления блокировками дифференциалов многоприводной колесной машины работает следующим образом. Водитель, воздействуя на органы управления на панели 11 приборов, включает бортовую систему управления блокировками дифференциалов в работу. Сигналы от датчиков 14, 15, 16, 17 скоростей вращения ведущих колес 3, 4, 5, 6 поступают в электронный блок 12 управления, где они обрабатываются и сопоставляются с пороговыми величинами рассогласований кинематических параметров ведущих колес 3 и 4 первого моста, кинематических параметров ведущих колес 5 и 6 второго моста, кинематических параметров ведущих колес 3, 4 первого моста и ведущих колес 5, 6 второго моста передней тележки 1[4]. В случае превышения рассогласования кинематических параметров ведущих колес 3, 4 пороговой величины электронный блок 12 управления выдает управляющий сигнал на блокирование межколесного дифференциала 29 первого моста передней тележки 1. После блокирования межколесного дифференциала 29 первого моста передней тележки 1 в электронный блок 12 управления поступает сигнал от датчика 22 о его блокировке. Водителю о блокировке межколесного дифференциала 29 первого моста передней тележки 1 сигнализирует индикаторная лампа на панели 11 приборов. В случае превышения рассогласования кинематических параметров ведущих колес 5, 6 пороговой величины электронный блок 12 управления выдает управляющий сигнал на блокирование межколесного дифференциала 30 второго моста передней тележки 1. После блокирования межколесного дифференциала 30 второго моста передней тележки 1 в электронный блок 12 управления поступает сигнал от датчика 23 о его блокировке. Водителю о блокировке межколесного дифференциала 30 второго моста передней тележки 1 сигнализирует индикаторная лампа на панели 11 приборов. В случае превышения рассогласования кинематических параметров ведущих колес 3, 4 первого моста и кинематических параметров ведущих колес 5, 6 второго моста пороговой величины электронный блок 12 управления выдает управляющий сигнал на блокирование межосевого дифференциала 31 передней тележки 1. После блокирования межосевого дифференциала 31 передней тележки 1 в электронный блок 12 управления поступает сигнал от датчика 24 о его блокировке. Водителю о блокировке межосевого дифференциала 31 передней тележки 1 сигнализирует индикаторная лампа на панели 11 приборов. Сигналы от датчиков 18, 19, 20, 21 скоростей вращения ведущих колес 7, 8, 9, 10 поступают в электронный блок 13 управления, где они обрабатываются и сопоставляются с пороговыми величинами рассогласований кинематических параметров ведущих колес 7 и 8 первого моста, кинематических параметров ведущих колес 9 и 10 второго моста, кинематических параметров ведущих колес 7, 8 первого моста ведущих колес 9, 10 второго моста задней тележки 2. В случае превышения рассогласования кинематических параметров ведущих колес 7, 8 пороговой величины электронный блок 13 управления выдает управляющий сигнал на блокирование межколесного дифференциала 32 первого моста задней тележки 2. После блокирования межколесного дифференциала 32 первого моста задней тележки 2 в электронный блок 13 управления поступает сигнал от датчика 25 о его блокировке. Водителю о блокировке межколесного дифференциала 32 первого моста задней тележки 2 сигнализирует индикаторная лампа на панели 11 приборов. В случае превышения рассогласования кинематических параметров ведущих колес 9, 10 пороговой величины электронный блок 13 управления выдает управляющий сигнал на блокирование межколесного дифференциала 33 второго моста задней тележки 2. После блокирования межколесного дифференциала 33 второго моста задней тележки 2 в электронный блок 13 управления поступает сигнал от датчика 26 о его блокировке. Водителю о блокировке межколесного дифференциала 33 второго моста задней тележки 2 сигнализирует индикаторная лампа на панели 11 приборов. В случае превышения рассогласования кинематических параметров ведущих колес 7, 8 первого моста и кинематических параметров ведущих колес 9, 10 второго моста задней тележки 2 пороговой величины электронный блок 13 управления выдает управляющий сигнал на блокирование межосевого дифференциала 34 задней тележки 2. После блокирования межосевого дифференциала 34 задней тележки 2 в электронный блок 13 управления поступает сигнал от датчика 27 о его блокировке. Водителю о блокировке межосевого дифференциала 34 задней тележки 2 сигнализирует индикаторная лампа на панели 11 приборов. Сигналы от датчиков 14, 15, 16, 17 скоростей вращения ведущих колес 3, 4 первого моста и ведущих колес 5, 6 второго моста передней тележки 1 через электронный блок 12 управления по информационно-управляющей шине 36 также поступают в электронный блок 13 управления. Электронный блок 13 управления обрабатывает их вместе с сигналами от датчиков 18, 19, 20, 21 скоростей вращения ведущих колес 7, 8 первого моста и ведущих колес 9, 10 второго моста задней тележки 2 и сопоставляет рассогласования кинематических параметров ведущих колес 3, 4, 5, 6 передней тележки 1 и ведущих колес 7, 8, 9,10 задней тележки 2 с пороговой величиной. В случае превышения рассогласования кинематических параметров ведущих колес 3, 4, 5, 6 передней тележки 1 и кинематических параметров ведущих колес 7, 8, 9, 10 задней тележки 2 пороговой величины электронный блок 13 управления выдает управляющий сигнал на блокирование межтележечного дифференциала 35 в РК. После блокирования межтележечного дифференциала 35 в раздаточной коробке в электронный блок 13 управления поступает сигнал от датчика 28 о его блокировке. Водителю о блокировке межтележечного дифференциала 35 в РК сигнализирует индикаторная лампа на панели 11 приборов. Сигналы от датчиков 14, 15, 16, 17, 18, 19, 20, 21 скоростей вращения ведущих колес 3, 4, 5, 6, 7, 8,9, 10 постоянно поступают в соответствующие электронные блоки 12, 13 управления, где они обрабатываются, и электронные блоки 12, 13 управления выдают соответствующие сигналы на управляющие клапаны 38 на блокирование управляемых дифференциалов. В случае возникновения внештатной ситуации и выхода из строя электронного блока 12 управления, о чем свидетельствует индикаторная лампа на панели 11 приборов, электронный блок 13 управления через элемент ИЛИ 37 и соответствующий управляющий клапан 38 выдает сигнал на блокирование межтележечного дифференциала 35 в РК. При этом в электронный блок 13 управления продолжают поступать и обрабатываться сигналы от датчиков 18, 19, 20, 21 скоростей вращения ведущих колес 7, 8, 9, 10. В зависимости от результатов их обработки электронный блок 13 управления осуществляет управление блокировками межколесного дифференциала 32 первого моста, межколесного дифференциала 33 второго моста и межосевого дифференциала 34 задней тележки 2. При блокировании межколесного дифференциала 32 первого моста, межколесного дифференциала 33 второго моста и межосевого дифференциала 34 задней тележки 2 в электронный блок 13 управления поступают сигналы от датчиков 25, 26, 27 о блокировке дифференциалов 32, 33, 34, о чем свидетельствует индикаторная лампа на панели 11 приборов. В случае возникновения внештатной ситуации и выхода из строя, электронного блока 13 управления, о чем свидетельствует индикаторная лампа на панели 11 приборов, электронный блок 12 управления через элемент ИЛИ 37 и соответствующий управляющий клапан 38 выдает сигнал на блокирование межтележечного дифференциала 35 в РК. При этом в электронный блок 12 управления продолжают поступать и обрабатываться сигналы от датчиков 14, 15, 16, 17 скоростей вращения ведущих колес 3, 4, 5, 6. В зависимости от результатов их обработки электронный блок 12 управления осуществляет управление блокировками межколесного дифференциала 29 первого моста, межколесного дифференциала 30 второго моста и межосевого дифференциала 31 передней тележки 1. При блокировании межколесного дифференциала 29 первого моста, межколесного дифференциала 30 второго моста и межосевого дифференциала 31 передней тележки 1 в электронный блок 12 управления поступают сигналы от датчиков 22, 23, 24 о блокировке дифференциалов 29, 30, 31, о чем свидетельствует индикаторная лампа на панели 11 приборов. О возникновении внештатной ситуации сигнализирует индикаторная лампа на панели 11 приборов. Водитель при получении от индикаторной лампы на панели 11 приборов сигнала о возникновении внештатной ситуации ведет машину в ближайшую ремонтную мастерскую для выявления и устранения возникшей неисправности. В случае, если в качестве колесных баз служат ведущие мосты, то идентичные электронные блоки управления устанавливаются на каждый ведущих мост многоприводной колесной машины. В случае,если в качестве колесных баз служат сочетания ведущих мостов и тележек, объединяющих пары ведущих мостов, то идентичные электронные блоки управления устанавливаются на эти ведущие мосты и тележки, объединяющие пары ведущих мостов, многоприводной колесной машины. В данных случаях бортовая система управления блокировками дифференциалов многоприводной колесной машины работает аналогичным образом. Таким образом, предлагаемое исполнение позволяет повысить устойчивость работы и эксплуатационную надежность бортовой системы управления блокировками дифференциалов многоприводных колесных машин, а также повысить унификацию компонентов данной системы. Источники информации 1. RU 60445, 2007. 2. BY 4237, 2008. 3. SAE J 1939. 4. BY 15148, 2011. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Бортовая система управления блокировками дифференциалов многоприводной колесной машины, содержащая идентичные между собой электронные блоки управления по числу колесных баз, каждый из которых связан с соответствующими датчиками скоростей вращения ведущих колес и датчиками блокировки дифференциалов, причем все упомянутые блоки управления связаны между собой информационно-управляющей шиной, при этом система дополнительно содержит элемент ИЛИ, входы которого связаны с каждым из электронных блоков управления, а выход - с межтележечным дифференциалом. 2. Система по п.1, отличающаяся тем, что в качестве колесных баз служат ведущие мосты и/или тележки, объединяющие пары ведущих мостов.
МПК / Метки
МПК: B60K 23/04, F16H 48/20
Метки: многоприводной, блокировками, управления, дифференциалов, бортовая, система, колесной, машины
Код ссылки
<a href="https://eas.patents.su/5-23385-bortovaya-sistema-upravleniya-blokirovkami-differencialov-mnogoprivodnojj-kolesnojj-mashiny.html" rel="bookmark" title="База патентов Евразийского Союза">Бортовая система управления блокировками дифференциалов многоприводной колесной машины</a>
Система управления энергопотреблением многодвигательной уборочной машины
Номер патента: 21545
Опубликовано: 30.07.2015
Авторы: Шедлер Алан Д., Маккин Райан П.
МПК: A01D 69/00, A01D 41/127, B60K 5/08...
Метки: многодвигательной, система, энергопотреблением, управления, уборочной, машины
Формула / Реферат:
1. Сельскохозяйственное транспортное средство, включающее в себяпару двигателей, содержащую первый двигатель и второй двигатель;множество нагрузок, содержащее первую механическую нагрузку, вторую механическую нагрузку, первую электрическую нагрузку и вторую электрическую нагрузку, причем первая механическая нагрузка подсоединена к первому двигателю, а вторая механическая нагрузка подсоединена ко второму двигателю;пару электрических генераторов,...
Система управления нагрузками сельскохозяйственной уборочной машины
Номер патента: 21129
Опубликовано: 30.04.2015
Авторы: Коэрс Брюс А., Маккин Райан П., Поуп Гленн Е., Шедлер Алан Д., Берк Дэниел Дж.
МПК: A01D 69/00, B60K 5/08
Метки: управления, машины, уборочной, сельскохозяйственной, система, нагрузками
Формула / Реферат:
1. Многодвигательная сельскохозяйственная уборочная машина, содержащаямножество поглощающих энергию нагрузок;первый двигатель, выполненный с возможностью подачи энергии к части из указанного множества поглощающих энергию нагрузок, причем первый двигатель имеет мощность, недостаточную для снабжения энергией всего указанного множества поглощающих энергию нагрузок;второй двигатель иконтроллер, выполненный с возможностью работы во множестве режимов,...
Система управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины на содержащее загрузочный резервуар транспортное средство
Номер патента: 20760
Опубликовано: 30.01.2015
Автор: Корманн Георг
МПК: A01D 43/073
Метки: содержащее, резервуар, машины, собранного, урожая, уборочной, средство, перегрузки, управления, сельскохозяйственного, система, транспортное, контролирования, загрузочный
Формула / Реферат:
1. Система перегрузки сельскохозяйственного урожая, содержащая уборочную машину (10), два транспортных средства (12, 12') и систему управления для контролирования перегрузки собранного сельскохозяйственного урожая с уборочной машины (10) на первое или второе транспортное средство (12, 12'), содержащее загрузочный резервуар (18, 18'), при этомсистема управления содержит вычислительное устройство (88, 102) и контролирующий блок (112) и соединена с...
Система управления сельскохозяйственного или промышленного транспортного средства и способ эксплуатации системы управления
Номер патента: 7823
Опубликовано: 27.02.2007
Авторы: Зоботцик Йоахим, Кнеер Бернд, Райнардс Марко, Тарасинский Николай
МПК: B60K 17/356, B60K 31/00, B60K 6/04...
Метки: система, способ, управления, транспортного, промышленного, эксплуатации, системы, средства, сельскохозяйственного
Формула / Реферат:
1. Система управления для сельскохозяйственного или промышленного транспортного средства, в частности трактора, причем для каждой полуоси моста, предпочтительно переднего моста (20), транспортного средства (10) предусмотрен электрический привод (22, 24), при помощи которого приводится по меньшей мере одно соединенное с соответствующей полуосью колесо (26), причем электропривод (22, 24) управляется таким образом, что от электропривода (22, 24)...
Бортовая антенная система с управляемой поляризацией для сопровождения спутников
Номер патента: 17031
Опубликовано: 28.09.2012
Авторы: Ляррегль Пьер, Пэйот Тома
МПК: H01Q 21/24
Метки: поляризацией, сопровождения, управляемой, бортовая, спутников, антенная, система
Формула / Реферат:
1. Антенная система (100), предназначенная для установки на борту летательного аппарата, содержащая фазированную антенную решетку (110), состоящую из множества элементарных антенн (120) с управляемой поляризацией, соединенных по меньшей мере с одним формирователем (151, 152) луча, отличающаяся тем, что содержитвычислительное устройство (160), выполненное с возможностью вычисления значений сдвига фазы (jV, jH) и коэффициентов ослабления...
Предыдущий патент: Способ формирования защитного покрытия на полимерном основании
Следующий патент: Состав для обработки семян кукурузы и люпина
Случайный патент: Фотостабильная фармацевтическая композиция, содержащая бривудин, для лечения герпетического кератита