Система регулирования объекта с рециклом
Формула / Реферат
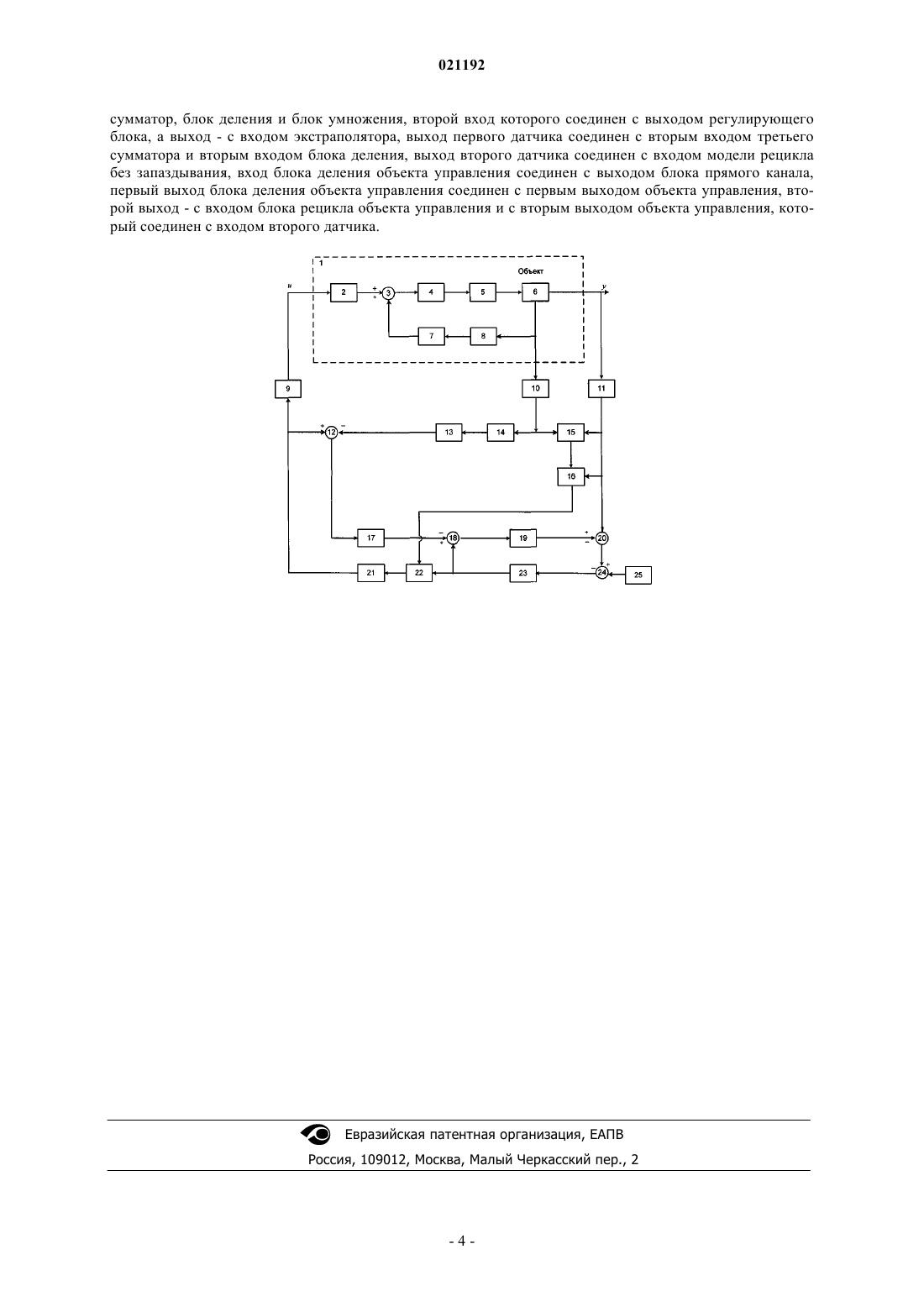
Система регулирования количества материала для объектов с рециклом, содержащая задатчик, экстраполятор, первый блок запаздывания, последовательно соединенные первый датчик, первый сумматор, первый блок вычитания, регулирующий блок, второй блок вычитания и модель прямого канала без запаздывания, последовательно включенные модель рецикла без запаздывания, второй блок запаздывания и третий блок вычитания, последовательно соединенные исполнительный блок и объект управления, включающий третий блок запаздывания, последовательно включенные модель рецикла без запаздывания, четвертый блок запаздывания, второй блок суммирования, пятый блок запаздывания, блок прямого канала без запаздывания, причем вход объекта управления соединен через третий блок запаздывания с вторым входом второго блока суммирования, выход задатчика соединен с вторым входом первого блока вычитания, выход модели прямого канала без запаздывания - с вторым входом первого сумматора, выход экстраполятора подключен к входу исполнительного блока и через третий блок вычитания и первый блок запаздывания к второму входу второго блока вычитания, отличающаяся тем, что дополнительно содержит блок деления объекта управления, последовательно соединенные с ним второй датчик, третий сумматор, блок деления и блок умножения, второй вход которого соединен с выходом регулирующего блока, а выход - с входом экстраполятора, выход первого датчика соединен с вторым входом третьего сумматора и вторым входом блока деления, выход второго датчика соединен с входом модели рецикла без запаздывания, вход блока деления объекта управления соединен с выходом блока прямого канала, первый выход блока деления объекта управления соединен с первым выходом объекта управления, второй выход - с входом блока рецикла объекта управления и с вторым выходом объекта управления, который соединен с входом второго датчика.

Текст
СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ Изобретение относится к автоматическому управлению и регулированию и может быть использовано при автоматическом управлении объектами с рециклом. Технический результат обеспечение работоспособности системы при различных входных величинах объекта и воздействий, поступающих в рецикл. Это достигается тем, что в систему регулирования объекта с рециклом, содержащую задатчик 25, экстраполятор 21, первый блок 17 запаздывания,последовательно включнные первый датчик 11, первый сумматор 20, первый блок вычитания 24,регулирующий блок 23, второй блок 18 вычитания и модель 19 прямого канала без запаздывания,последовательно включнные модель 14 рецикла без запаздывания, второй блок 13 запаздывания,третий блок 12 вычитания, исполнительный блок 9 и объект 1 управления, включающий третий блок 2 запаздывания, последовательно включнные блок 8 рецикла без запаздывания,четвртый блок 7 запаздывания, второй блок 3 суммирования, пятый блок 4 запаздывания, блок 5 прямого канала без запаздывания, введены блок 6 деления объекта управления, последовательно включнные второй датчик 10, третий сумматор 15, блок 16 деления и блок 22 умножения.(71)(73) Заявитель и патентовладелец: ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ "СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ"- ФГБОУВПО Изобретение относится к автоматическому управлению и регулированию и может быть использовано при автоматическом управлении объектами с рециклом, в которых часть обрабатываемого материала (вещества) поступает на выход объекта, а другая часть (рецикл) возвращается с запаздыванием на вход объекта. Количество материала рецикла измеряется. Объект в прямой цепи содержит транспортное запаздывание и подвержен влиянию с нестационарными свойствами. Динамика объекта по каналу регулирования описывается операторной зависимостьюo, r - операторы динамического преобразования сигналов без учета запаздываний в прямой цепи и в цепи рецикла объекта;- коэффициент распределения материалов между выходом объекта и рециклом. Примерами указанных объектов могут служить системы приготовления водноугольного топлива,где для получения требуемой вязкости топлива часть его возвращается на вход барабана-смесителя. Задача регулирования заключается в поддержании заданного количества материала с требуемыми свойствами на выходе объекта регулирования. Предшествующий уровень техники Для регулирования объектов с рециклом известна система управления [а.с. СССР 1244636, G05B 13/02, 1980] содержащая задатчик, последовательно включенные объект регулирования, датчик, первый сумматор, измеритель рассогласования, регулирующий блок, второй сумматор, экстраполятор, исполнительный механизм, выход которого подключен к входу объекта регулирования, последовательно включенные первый блок задержки, третий сумматор, четвертый сумматор, модель прямого канала, первый масштабирующий блок, второй блок задержки, выход которого подключен к второму входу четвертого сумматора, последовательно включенные второй масштабирующий блок и третий блок задержки, выход которого соединен с вторым входом второго сумматора, выход экстраполятора подключен к входу первого блока задержки, выход второго сумматора - к второму входу третьего сумматора, выход модели прямого канала - к второму входу первого сумматора, выход которого соединен с входом второго масштабирующего блока, выход задатчика подключен к второму входу измерителя рассогласования. При работе системы управления регулирующим блоком вырабатывается в натурно-модельном контуре с моделью объекта, включающую четвертый сумматор, модель прямого канала, первый масштабирующий блок и второй блок задержки, управляющее воздействие, которое экстраполируется с помощью экстраполятора на текущий момент времени. Отрицательное влияние рецикла (положительной обратной связи в объекте) компенсируется с помощью модели рецикла, составленной из второго масштабирующего блока и второго блока задержки. Недостаток системы управления заключается в низких функциональных возможностях, так как она предназначена для регулирования таких выходных параметров объекта, которые равны воздействию,поступающему на рецикл. В частности, к таким параметрам может относиться концентрация элементов в выходном продукте объекта управления. Количество или расход продукта не может относиться к указанным параметрам, потому что выходное воздействие объекта и воздействие рецикла различны по величине. Известна система регулирования для объектов с запаздыванием [а.с. СССР 1295365, G05B 13/00],содержащая задатчик, последовательно включенные первую модель рецикла без запаздывания и первый блок задержки, последовательно включенные первый сумматор, первый блок задержки, первую модель прямого канала, второй блок задержки, первый блок вычитания, первый экстраполятор, второй сумматор, вторую модель рецикла без запаздывания, третий блок задержки, второй блок управления, датчик,третий блок вычитания, регулирующий блок, второй экстраполятор, четвертый блок задержки, четвертый блок вычитания, вторую модель прямого канала без запаздывания, выход которой подключен к второму входу третьего сумматора, выход задатчика соединен с вторым входом третьего блока вычитания,выход регулирующего блока - с вторым входом четвертого блока вычитания, выход второго экстраполятора - с вторым входом второго блока вычитания, выход которого подключен к первому входу первого сумматора, второй вход которого соединен с выходом первого блока задержки, выход первой модели прямого канала без задержки подключен к входу первой модели рецикла без задержки и к второму входу второго сумматора. Работает система регулирования следующим образом. Регулирующее воздействие, вырабатываемое регулирующим блоком в замкнутом через вторую модель прямого канала без запаздывания контуре, экстраполируется вторым экстраполятором. Из экстраполированного регулирующего воздействия исключается во втором блоке вычитания прогноз эффекта рецикла. Этот прогноз состоит из преобразованной во второй модели рецикла без запаздывания экстраполированной оценки неконтролируемого возмущения, получаемого на выходе первого экстраполятора,-1 021192 и эффекта регулирующего воздействия с выхода первой модели прямого канала без учета запаздывания. Ошибка экстраполяции регулирующего воздействия пересчитывается во второй модели прямого канала без запаздывания в приращении выходной переменной объекта и алгебраически суммируется с ней в третьем сумматоре. Недостаток известной системы регулирования заключается в низких функциональных возможностях, таких как работоспособность для объектов, в которых выходная величина объекта и величина воздействия, поступающего в рецикл, равны. Сущность изобретения Технический результат - обеспечение работоспособности системы при различных входных величинах объекта и воздействий, поступающих в рецикл. Это достигается тем, что в систему регулирования для объектов с рециклом, содержащую задатчик,экстраполятор, первый блок задержки, последовательно включенные первый датчик, первый сумматор,первый блок вычитания, регулирующий блок, второй блок вычитания и модель прямого канала без запаздывания, последовательно включенные модель рецикла без запаздывания, второй блок запаздывания,третий блок вычитания, исполнительный блок и объект управления, включающий третий блок запаздывания, последовательно включенные блок рецикла без запаздывания, четвертый блок запаздывания, второй блок суммирования, пятый блок запаздывания, блок прямого канала без запаздывания, причем вход объекта управления соединен через третий блок запаздывания с вторым входом второго блока суммирования, выход задатчика соединен с вторым входом первого блока вычитания, выход модели прямого канала без запаздывания - с вторым входом первого сумматора, выход экстраполятора подключен через третий блок вычитания и первый блок запаздывания к второму входу второго блока вычитания, введены блок деления объекта управления, последовательно включены второй датчик, третий сумматор, блок деления и блок умножения, второй вход которого соединен с выходом регулирующего блока, а выход - с входом экстраполятора, выход первого датчика соединен с вторым входом третьего сумматора и вторым входом блока деления, выход второго датчика соединен с входом модели рецикла без запаздывания, вход блок деления объекта управления соединен с выходом блока прямого канала объекта без запаздывания,первый выход блока деления объекта управления соединен с первым выходом объекта управления, второй выход - с входом блока рецикла объекта без запаздывания и с вторым входом объекта управления,который соединен с входом второго датчика. На чертеже приведена блок-схема системы регулирования. Система регулирования объекта с рециклом содержит объект 1 управления, третий блок 2 запаздывания, второй блок 3 суммирования, пятый блок 4 запаздывания, блок 5 прямого канала, блок 6 деления объекта управления, четвертый блок 7 запаздывания, блок 8 рецикла без запаздывания, исполнительный блок 9, второй датчик 10, первый датчик 11, третий блок 12 вычитания, второй блок 13 запаздывания,модель 14 рецикла без запаздывания, третий сумматор 15, блок 16 деления, первый блок 17 запаздывания, второй блок 18 вычитания, модель 19 прямого канала без запаздывания, первый сумматор 20, экстраполятор 21, блок 22 умножения, регулирующий блок 23, первый блок 24 вычитания, задатчик 25. Модели прямого канала 19 и рецикла 14 без запаздывания представлены, например, в виде последовательного соединения инерционных звеньев. Регулирующий блок 23, в частности, с пропорциональноинтегральным законом регулирования реализован в виде параллельного соединения интегратора и масштабирующего блока. Экстраполятор 21 представлен реальным форсирующим звеном. В качестве исполнительного блока 9 может служить, например, весовой дозатор непрерывного действия, а в качестве датчиков 10 и 11 - весоизмерители непрерывного действия. Предлагаемая система работает следующим образом. В модельном контуре регулирования, состоящем из модели 19 прямого канала без запаздывания и регулирующего блока 23, вырабатывается регулирующее воздействие, направленное на поддержание равенства выходного воздействия у объекта управления заданному значению. Это регулирующее воздействие пересчитывается на управляющее воздействие с учетом воздействия рецикла и экстраполируется на текущий момент времени. Наличие измерения воздействия, поступающего в рецикл, позволяет учесть его влияние, во-первых, за счет моделирования его эффекта с помощью модели 14 рецикла без запаздывания и второго блока 13 запаздывания и, во-вторых, путем определения и учета соотношения между выходным воздействием объекта и воздействием рецикла. Для реализации изложенной процедуры функционирования системы первый выход объекта 1 управления y(f) измеряется первым датчиком 11 и полученный сигнал суммируется в первом сумматоре 20 с выходным сигналом модели 19 прямого канала без запаздывания. Выходной сигнал первого сумматора 20 о натурно-модельном выходе объекта вычитается в первом блоке 24 вычитания из сигнала y(t) задатчика 25 и заданном значении первого выхода объекта и сигнал о полученной разности поступает на вход регулирующего блока 23, например, с пропорционально интегральным законом регулирования. Выходной сигнал u1(t-u-o) о необходимом управляющем воздействии для поддержания равенства y(t) =y(t), где u и o - время запаздывания в третьем 2u и пятом 4o блоках запаздывания, a t - текущее время,подается на первый вход блока 22 умножения. На второй вход этого блока 22 подается выходной сигнал блока 16 деления, который характеризует долю выходного сигнала y(t) объекта в сумме сигналов о y(t) иyr(t), где последний сигнал о величине рецикла, получаемый с выхода второго датчика 10. Выходной сигнал (t) блока деления 16 определяется по выражению Для реализации этого выражения выходные сигналы первого 11 и второго 10 датчиков суммируются в третьем сумматоре 15, выходной сигнал которого делится в блоке 16 деления на выходной сигналy(t) первого датчика 11. В блоке 22 умножения формируется сигнал об управляющем воздействии u(t)-(o-r), учитывающем выходные воздействия y(t) и yr(t). Сигнал u(t)-(o-r) экстраполируется на интервал времени (o+r) и подается на первый вход третьего блока вычитания, где из него вычитается сигнал о величине воздействия рецикла, которое поступает на второй сумматор 2 объекта управления через время r. Для этого выходной сигнал второго датчика 10 преобразуется в модели 14 рецикла без запаздывания, задерживается во втором блоке 13 запаздывания и поступает на вход третьего блока 12 вычитания. Выходной сигнал третьего блока 12 вычитания подается для реализации на исполнительный блок 9. Введение новых блоков и связей позволяет использовать систему регулирования для объектов с рециклом, у которых часть выходного воздействия поступает на выход объекта, а другая часть поступает в цепь рецикла. Перечень позиций на чертеже. 1 - объект управления,2 - третий блок запаздывания,3 - второй блок суммирования,4 - пятый блок запаздывания,5 - блок прямого канала,6 - блок деления объекта управления,7 - четвертый блок запаздывания,8 - блок рецикла объекта управления,9 - исполнительный блок,10 - второй датчик,11 - первый датчик,12 - третий блок вычитания,13 - второй блок запаздывания,14 - модель рецикла без запаздывания,15 - третий сумматор,16 - блок деления,17 - первый блок запаздывания,18 - второй блок вычитания,19 - модель прямого канала без запаздывания,20 - первый сумматор,21 - экстраполятор,22 - блок умножения,23 - регулирующий блок,24 - первый блок вычитания,25 - задатчик. ФОРМУЛА ИЗОБРЕТЕНИЯ Система регулирования количества материала для объектов с рециклом, содержащая задатчик, экстраполятор, первый блок запаздывания, последовательно соединнные первый датчик, первый сумматор,первый блок вычитания, регулирующий блок, второй блок вычитания и модель прямого канала без запаздывания, последовательно включенные модель рецикла без запаздывания, второй блок запаздывания и третий блок вычитания, последовательно соединенные исполнительный блок и объект управления,включающий третий блок запаздывания, последовательно включенные модель рецикла без запаздывания, четвертый блок запаздывания, второй блок суммирования, пятый блок запаздывания, блок прямого канала без запаздывания, причем вход объекта управления соединен через третий блок запаздывания с вторым входом второго блока суммирования, выход задатчика соединен с вторым входом первого блока вычитания, выход модели прямого канала без запаздывания - с вторым входом первого сумматора, выход экстраполятора подключен к входу исполнительного блока и через третий блок вычитания и первый блок запаздывания к второму входу второго блока вычитания, отличающаяся тем, что дополнительно содержит блок деления объекта управления, последовательно соединнные с ним второй датчик, третий сумматор, блок деления и блок умножения, второй вход которого соединен с выходом регулирующего блока, а выход - с входом экстраполятора, выход первого датчика соединен с вторым входом третьего сумматора и вторым входом блока деления, выход второго датчика соединен с входом модели рецикла без запаздывания, вход блока деления объекта управления соединен с выходом блока прямого канала,первый выход блока деления объекта управления соединен с первым выходом объекта управления, второй выход - с входом блока рецикла объекта управления и с вторым выходом объекта управления, который соединен с входом второго датчика.
МПК / Метки
МПК: G05B 13/00
Метки: рециклом, регулирования, система, объекта
Код ссылки
<a href="https://eas.patents.su/5-21192-sistema-regulirovaniya-obekta-s-reciklom.html" rel="bookmark" title="База патентов Евразийского Союза">Система регулирования объекта с рециклом</a>
Способ и устройство получения информации о внутренней структуре объекта и способ создания изображения объекта
Номер патента: 11316
Опубликовано: 27.02.2009
Авторы: Сотский Сергей Вячеславович, Щербаков Андрей Юрьевич
МПК: G01N 23/203
Метки: информации, получения, создания, внутренней, объекта, изображения, устройство, структуре, способ
Формула / Реферат:
1. Способ получения информации о внутренней структуре объекта, заключающийся в том, что участки объекта облучают подвижным пучком проникающего излучения, содержащего примерно одинаковое число квантов, и улавливают от каждого облученного участка объекта отраженную часть упомянутого пучка, величину которой регистрируют в виде числа квантов, получая таким образом цифровое представление о внутренней структуре объекта. 2. Способ по п.1, отличающийся...
Система для маркировки биологического объекта, не являющегося человеком, и для взятия образца биологического объекта
Номер патента: 16236
Опубликовано: 30.03.2012
Авторы: Кейсли Рой, Винкелер Хенрик, Нельс Райнхард
МПК: B01F 13/00, A01K 11/00
Метки: образца, объекта, являющегося, человеком, биологического, система, взятия, маркировки
Формула / Реферат:
1. Система для маркировки и взятия образца биологического объекта, не являющегося человеком, содержащаяпервую часть (1) бирки;вторую часть (2) бирки;штифт (3), имеющий первый конец и второй конец, соединяющийся с первой частью бирки первым концом и содержащий головку (4) на втором конце, причем вторая часть бирки снабжена приемным отверстием (5) для головки (4) штифта, так что штифт может быть продавлен через часть биологического объекта, в...
Способ и система определения местоположения объекта на территории
Номер патента: 20290
Опубликовано: 30.10.2014
Автор: Земсков Александр Юрьевич
МПК: G01S 5/14
Метки: местоположения, объекта, территории, определения, способ, система
Формула / Реферат:
1. Способ определения местоположения объекта на территории, включающий предварительный выбор интервала между географическими точками на территории, предварительное измерение физических параметров искусственного радиоизлучения в выбранных точках, запись в базу данных указанных физических параметров в отношении каждой выбранной географической точки и последующее определение местоположения объекта путем измерения физических параметров...
Система для маркировки и взятия проб биологического объекта
Номер патента: 9803
Опубликовано: 28.04.2008
Автор: Кейсли Рой
МПК: A01K 11/00
Метки: система, проб, взятия, маркировки, объекта, биологического
Формула / Реферат:
1. Система для маркировки биологического объекта и взятия проб биологического объекта, который, в частности, является животным, содержащая первую часть (1) метки, вторую часть (2) метки, пробойник (3), имеющий первый конец и второй конец, причем пробойник соединен с первой частью метки своим первым концом и снабжен головкой (4) на своем втором конце, в которой вторая часть метки имеет приемное отверстие (5) для головки (4) пробойника, при этом...
Способ создания электронного паспорта объекта недвижимости и система для его осуществления
Номер патента: 9827
Опубликовано: 28.04.2008
Автор: Акбашев Беслан Борисович
МПК: G06Q 50/00, G06Q 10/00
Метки: осуществления, паспорта, способ, недвижимости, создания, электронного, объекта, система
Формула / Реферат:
1. Способ создания, хранения, использования и поддержки в актуальном состоянии электронного паспорта объектов недвижимости на этапах проектирования, строительства, реконструкции, ремонтов и эксплуатации, содержащий этапы: а) анализа имеющейся информации об объекте, представленной в различных исходных форматах, на предмет ее полноты и актуальности, б) преобразования информации, представленной в исходных форматах, по меньшей мере в два...
Предыдущий патент: Новые антигены gp41
Следующий патент: Автоматизированная система управления командного пункта военно-воздушных сил и войск противовоздушной обороны
Случайный патент: Доильный стакан и часть доильного стакана