Способ и машина для понижения уровня пути

Формула / Реферат
1. Способ контролируемого понижения уровня пути (2), при котором его с помощью динамических ударных сил приводят в поперечные колебания и нагружают вертикальной нагрузкой, причем определяющий понижение уровня пути размер (h) осадки контролируют посредством сканирующей положение пути измерительной системы (10), которая содержит проходящую в продольном направлении машины измерительную хорду (12) с выполненными с возможностью обката по пути (2) местами (11) сканирования, отличающийся тем, что он включает в себя следующие этапы:
а) в заднем по отношению к рабочему направлению (6) месте (11) сканирования измерительной системы (10) регистрируют и записывают в память продольный уклон (a) пути (2) в сочетании с измерением пути;
б) из записанных в память значений продольного уклона (a) и измерения пути для протянувшейся назад по меньшей мере на 10 м от заднего места (11) сканирования по отношению к рабочему направлению (6) длины пути образуют фактический высотный профиль (16) и расчетным путем вычисляют накладывающуюся на него, отображающую заданное положение пути заднюю компенсирующую прямую (17);
в) заднее место (11) сканирования расчетным путем направляют вдоль задней компенсирующей прямой (17), так что в расположенном между задним и передним местами сканирования среднем месте (11) сканирования возникает компенсационное значение расчетного положения измерительной хорды (12).
2. Способ по п.1, отличающийся тем, что он включает в себя следующие этапы:
а) в переднем по отношению к рабочему направлению (6) месте (11) сканирования измерительной системы (10) регистрируют и записывают в память продольный уклон (a) пути (2) в сочетании с измерением пути;
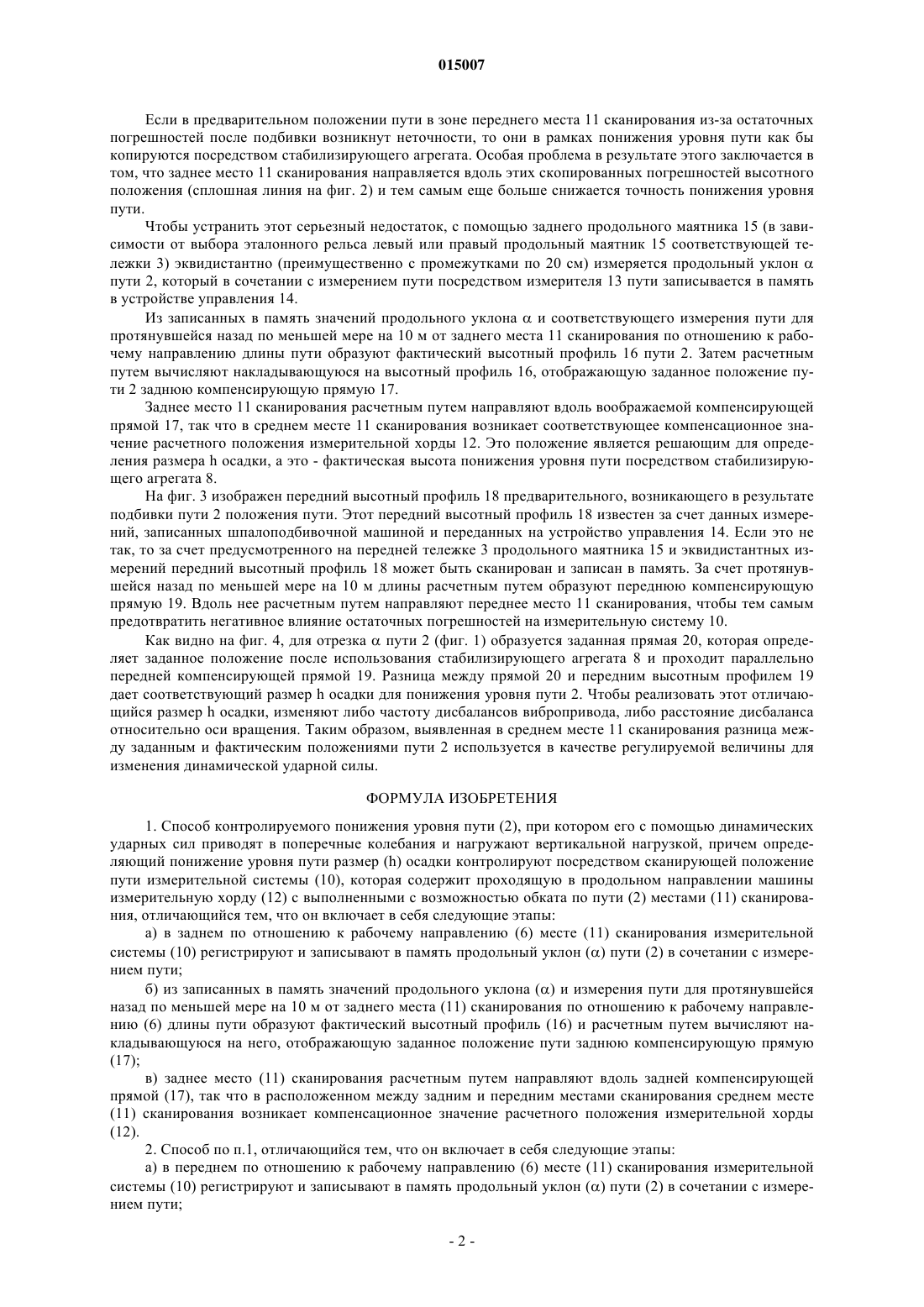
б) из записанных в память значений продольного уклона (a) и измерения пути для протянувшейся назад по меньшей мере на 10 м от заднего места (11) сканирования по отношению к рабочему направлению (6) длины пути образуют фактический высотный профиль (18) и расчетным путем вычисляют накладывающуюся на него, отображающую заданное положение пути переднюю компенсирующую прямую (19);
в) переднее место (11) сканирования расчетным путем направляют вдоль передней компенсирующей прямой (19), так что в среднем месте (11) сканирования возникает компенсационное значение расчетного положения измерительной хорды (12).
3. Способ по п.1 или 2, отличающийся тем, что выявленную в среднем месте (11) сканирования разницу между заданным и фактическим положениями пути (2) используют в качестве регулируемой величины для изменения динамической ударной силы.
4. Машина для контролируемого понижения уровня пути, содержащая расположенный между тележками (3) приводимый в контакт с путем (3) с геометрическим замыканием, вырабатывающий динамические ударные силы стабилизирующий агрегат (8) и измерительную систему (10) для регистрации продольного уклона (a) пути (2), содержащую переднее и заднее по отношению к рабочему направлению (6), выполненные с возможностью обкатывания по пути (2), места (11) сканирования, расположенное между ними среднее место (11) сканирования и измеритель (13) пути, отличающаяся тем, что она содержит следующие признаки:
а) на задней по отношению к стабилизирующему агрегату (8) тележке (3) предусмотрен продольный маятник (15) для регистрации продольного уклона (a) пути (2);
б) предусмотрено устройство управления (14), выполненное для записи в память продольного уклона (a), для образования фактического высотного профиля (16) и для расчетного определения задней компенсирующей прямой (17), накладывающейся на высотный профиль (16) и отображающей заданное положение.
5. Машина по п.4, отличающаяся тем, что на передней по отношению к стабилизирующему агрегату (8) тележке (3) предусмотрен продольный маятник (15) для регистрации продольного уклона (a) пути (2), при этом предусмотрено устройство управления (14), выполненное для записи в память продольного уклона (a), для образования фактического высотного профиля (18) и для расчетного определения передней компенсирующей прямой (19), накладывающейся на высотный профиль (18) и отображающей заданное положение.
6. Машина по одному из пп.4 или 5, отличающаяся тем, что на каждой тележке (3) предусмотрены два удаленных друг от друга в поперечном направлении пути продольных маятника (15) для регистрации продольного уклона (a) пути (2).
7. Машина по одному из пп.4-6, отличающаяся тем, что расстояние (a) между средним и передним местами (11) сканирования измерительной системы (10) меньше расстояния (b) между средним и задним местами (11) сканирования.

Текст
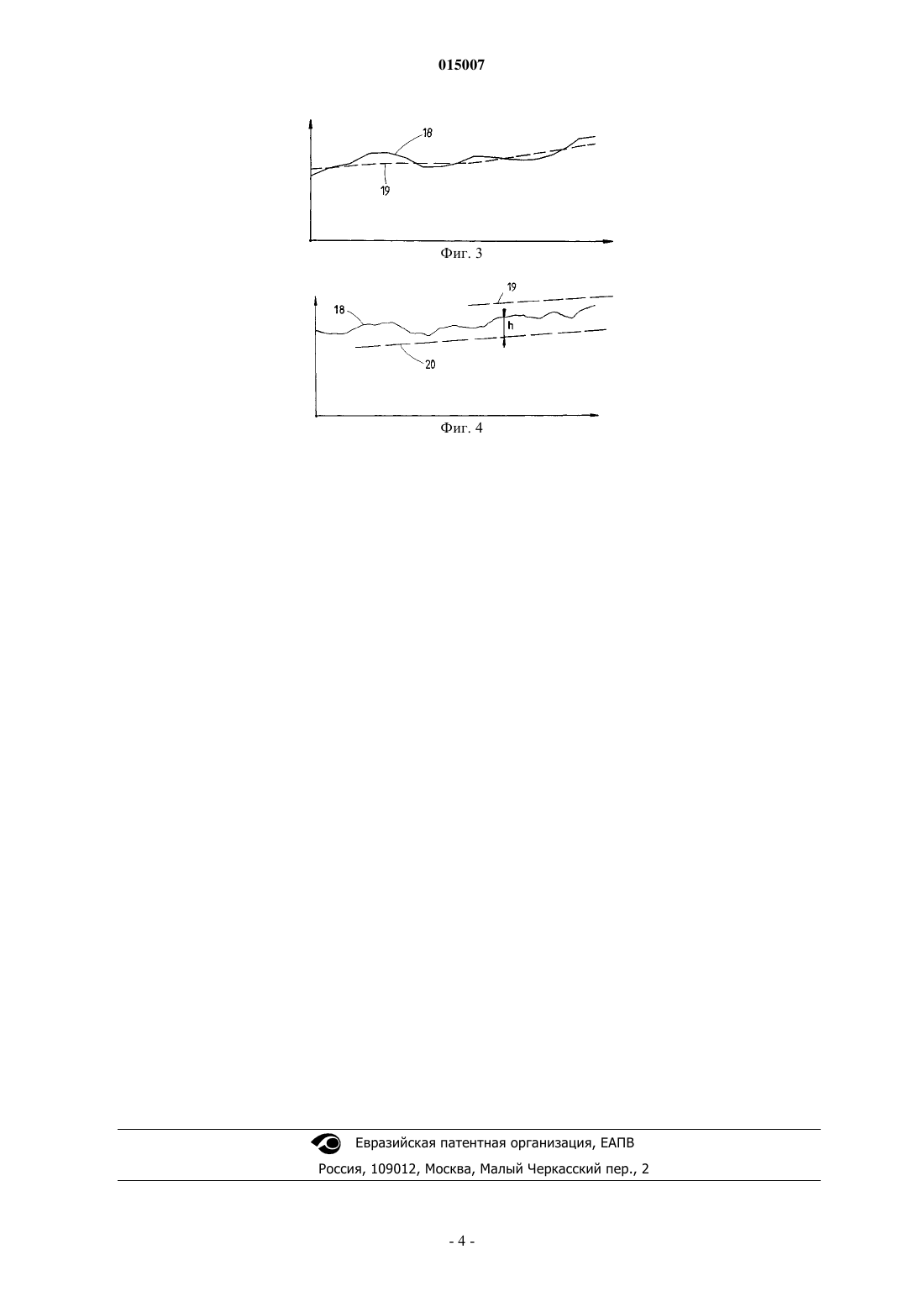
СПОСОБ И МАШИНА ДЛЯ ПОНИЖЕНИЯ УРОВНЯ ПУТИ(71)(73) Заявитель и патентовладелец: ФРАНЦ ПЛАССЕР БАНБАУМАШИНЕНИНДУСТРИГЕЗЕЛЬШАФТ МБХ (AT) В изобретении показано, что для контролируемого понижения уровня пути (2) в заднем месте(11) сканирования измерительной системы (10) регистрируется и записывается в память продольный уклонпути (2). Для протянувшейся назад по меньшей мере на 10 м длины образуют фактический высотный профиль (16) и вычисляют накладывающуюся на него, отображающую заданное положение пути заднюю компенсирующую прямую (17). Заднее место (11) сканирования расчетным путем направляется вдоль задней компенсирующей прямой (17), так что в расположенном между задним и передним местами сканирования среднем месте (11) сканирования возникает компенсационное значение положения измерительной хорды (12). 015007 Изобретение относится к способу и машине для контролируемого понижения уровня пути в соответствии с ограничительными частями пп.1 и 4 формулы. Такая машина, называемая стабилизатором пути, известна из US 5172637. Измерительная система содержит три обкатывающиеся по пути измерительные оси, каждой из которых придан поперечный маятник для регистрации поперечного уклона пути. Таким образом, имеющийся перед использованием машины поперечный уклон пути точно копируется, так что он после использования машины остается без изменений. Из GB 2268021 и GB 2268529 известно расположение на каждой тележке в сочетании с очисткой щебня двух продольных маятников, чтобы перед удалением щебня выявить фактическое положение пути и восстановить его после укладки очищенного щебня. Задачей изобретения является создание способа и машины описанного выше рода, с помощью которого/которой можно было бы улучшить положение пути после понижения его уровня. Эта задача решается согласно изобретению посредством родового способа с признаками, приведенными в отличительной части п.1 формулы. Особая проблема остаточных погрешностей, возникающих после использования стабилизирующего агрегата, заключается в том, что в процессе работы машины они могут оказывать все более возрастающее негативное влияние на заднее место сканирования. Благодаря предложенному способу можно направлять заднее место сканирования измерительной системы вдоль воображаемой компенсирующей прямой. Этим можно надежно воспрепятствовать ухудшению точности измерительной системы за счет остаточных погрешностей в сочетании с понижением уровня пути с помощью стабилизирующего агрегата. Поставленная задача решается согласно изобретению также посредством родовой машины с признаками, приведенными в отличительной части п.4 формулы. Это выполнение требует лишь небольших дополнительных конструктивных затрат без необходимости изменения самой измерительной системы. Другие преимущества изобретения приведены в зависимых пунктах формулы и в описании чертежей. Ниже изобретение более подробно поясняется на примере его осуществления, изображенном на чертежах, на которых представляют: фиг. 1 - схематичный вид сбоку стабилизатора пути с измерительной системой для контролируемого понижения уровня пути; фиг. 2 - схематичный вид измерительной системы; фиг. 3 и 4 - другие схематичные виды высотного профиля пути. Изображенная на фиг. 1 машина 1 для контролируемого понижения уровня пути 2 называется также стабилизатором пути. Машина 1 содержит опирающуюся на тележки 3 раму 4 и перемещается с помощью двигателя 5 в рабочем направлении 6. Между тележками 3 находится регулируемый по высоте посредством приводов 7 стабилизирующий агрегат 8 с виброприводом 9. Последний вырабатывает воздействующие на путь 2 горизонтально и перпендикулярно его продольному направлению поперечные колебания, которые в сочетании с вертикальной нагрузкой обоими приводами 7 вызывают понижение уровня пути. Измерительная система 10 имеет по отношению к рабочему направлению 6 переднее, заднее и расположенное между ними среднее места 11 сканирования, которые для сканирования положения пути по высоте обкатываются по пути 2. Между передним и задним местами 11 сканирования натянуты две проходящие в продольном направлении машины измерительные хорды 12, положение по высоте которых относительно пути 2 сканируется в среднем месте 11 сканирования. На каждой тележке 3 расположены два продольных маятника 15, которые удалены друг от друга перпендикулярно продольному направлению пути. Каждый продольный маятник 15 служит для измерения продольного уклона пути 2. Для регистрации пройденного пути в среднем месте 11 сканирования предусмотрен датчик 13 пути. Устройство управления 14 служит для записи в память и обработки полученных измерительной системой 10 данных измерений. На фиг. 2 измерительная система 10 изображена схематично. Переднее место 11 сканирования направляется по скорректированному шпалоподбивочной машиной предварительному положению пути. С помощью расположенной в зоне стабилизирующего агрегата 8 среднего места 11 сканирования регистрируется понижение уровня пути 2 в масштабе заданного размера h осадки относительно измерительной хорды 12. Заднее место 11 сканирования направляется вдоль окончательного положения пути. В среднем относительно стабилизирующего агрегата 8 (фиг. 1) месте 11 сканирования предусмотрен задний продольный маятник 15 для регистрации продольного уклонапути. Устройство управления 14 выполнено для записи в память продольного уклона , для образования фактического высотного профиля 16 и для расчетного определения компенсирующей прямой 17, накладывающейся на высотный профиль 16 и отображающей заданное положение.-1 015007 Если в предварительном положении пути в зоне переднего места 11 сканирования из-за остаточных погрешностей после подбивки возникнут неточности, то они в рамках понижения уровня пути как бы копируются посредством стабилизирующего агрегата. Особая проблема в результате этого заключается в том, что заднее место 11 сканирования направляется вдоль этих скопированных погрешностей высотного положения (сплошная линия на фиг. 2) и тем самым еще больше снижается точность понижения уровня пути. Чтобы устранить этот серьезный недостаток, с помощью заднего продольного маятника 15 (в зависимости от выбора эталонного рельса левый или правый продольный маятник 15 соответствующей тележки 3) эквидистантно (преимущественно с промежутками по 20 см) измеряется продольный уклонпути 2, который в сочетании с измерением пути посредством измерителя 13 пути записывается в память в устройстве управления 14. Из записанных в память значений продольного уклонаи соответствующего измерения пути для протянувшейся назад по меньшей мере на 10 м от заднего места 11 сканирования по отношению к рабочему направлению длины пути образуют фактический высотный профиль 16 пути 2. Затем расчетным путем вычисляют накладывающуюся на высотный профиль 16, отображающую заданное положение пути 2 заднюю компенсирующую прямую 17. Заднее место 11 сканирования расчетным путем направляют вдоль воображаемой компенсирующей прямой 17, так что в среднем месте 11 сканирования возникает соответствующее компенсационное значение расчетного положения измерительной хорды 12. Это положение является решающим для определения размера h осадки, а это - фактическая высота понижения уровня пути посредством стабилизирующего агрегата 8. На фиг. 3 изображен передний высотный профиль 18 предварительного, возникающего в результате подбивки пути 2 положения пути. Этот передний высотный профиль 18 известен за счет данных измерений, записанных шпалоподбивочной машиной и переданных на устройство управления 14. Если это не так, то за счет предусмотренного на передней тележке 3 продольного маятника 15 и эквидистантных измерений передний высотный профиль 18 может быть сканирован и записан в память. За счет протянувшейся назад по меньшей мере на 10 м длины расчетным путем образуют переднюю компенсирующую прямую 19. Вдоль нее расчетным путем направляют переднее место 11 сканирования, чтобы тем самым предотвратить негативное влияние остаточных погрешностей на измерительную систему 10. Как видно на фиг. 4, для отрезкапути 2 (фиг. 1) образуется заданная прямая 20, которая определяет заданное положение после использования стабилизирующего агрегата 8 и проходит параллельно передней компенсирующей прямой 19. Разница между прямой 20 и передним высотным профилем 19 дает соответствующий размер h осадки для понижения уровня пути 2. Чтобы реализовать этот отличающийся размер h осадки, изменяют либо частоту дисбалансов вибропривода, либо расстояние дисбаланса относительно оси вращения. Таким образом, выявленная в среднем месте 11 сканирования разница между заданным и фактическим положениями пути 2 используется в качестве регулируемой величины для изменения динамической ударной силы. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ контролируемого понижения уровня пути (2), при котором его с помощью динамических ударных сил приводят в поперечные колебания и нагружают вертикальной нагрузкой, причем определяющий понижение уровня пути размер (h) осадки контролируют посредством сканирующей положение пути измерительной системы (10), которая содержит проходящую в продольном направлении машины измерительную хорду (12) с выполненными с возможностью обката по пути (2) местами (11) сканирования, отличающийся тем, что он включает в себя следующие этапы: а) в заднем по отношению к рабочему направлению (6) месте (11) сканирования измерительной системы (10) регистрируют и записывают в память продольный уклонпути (2) в сочетании с измерением пути; б) из записанных в память значений продольного уклонаи измерения пути для протянувшейся назад по меньшей мере на 10 м от заднего места (11) сканирования по отношению к рабочему направлению (6) длины пути образуют фактический высотный профиль (16) и расчетным путем вычисляют накладывающуюся на него, отображающую заданное положение пути заднюю компенсирующую прямую(17); в) заднее место (11) сканирования расчетным путем направляют вдоль задней компенсирующей прямой (17), так что в расположенном между задним и передним местами сканирования среднем месте(11) сканирования возникает компенсационное значение расчетного положения измерительной хорды(12). 2. Способ по п.1, отличающийся тем, что он включает в себя следующие этапы: а) в переднем по отношению к рабочему направлению (6) месте (11) сканирования измерительной системы (10) регистрируют и записывают в память продольный уклонпути (2) в сочетании с измерением пути;-2 015007 б) из записанных в память значений продольного уклонаи измерения пути для протянувшейся назад по меньшей мере на 10 м от заднего места (11) сканирования по отношению к рабочему направлению (6) длины пути образуют фактический высотный профиль (18) и расчетным путем вычисляют накладывающуюся на него, отображающую заданное положение пути переднюю компенсирующую прямую (19); в) переднее место (11) сканирования расчетным путем направляют вдоль передней компенсирующей прямой (19), так что в среднем месте (11) сканирования возникает компенсационное значение расчетного положения измерительной хорды (12). 3. Способ по п.1 или 2, отличающийся тем, что выявленную в среднем месте (11) сканирования разницу между заданным и фактическим положениями пути (2) используют в качестве регулируемой величины для изменения динамической ударной силы. 4. Машина для контролируемого понижения уровня пути, содержащая расположенный между тележками (3) приводимый в контакт с путем (3) с геометрическим замыканием, вырабатывающий динамические ударные силы стабилизирующий агрегат (8) и измерительную систему (10) для регистрации продольного уклонапути (2), содержащую переднее и заднее по отношению к рабочему направлению(6), выполненные с возможностью обкатывания по пути (2), места (11) сканирования, расположенное между ними среднее место (11) сканирования и измеритель (13) пути, отличающаяся тем, что она содержит следующие признаки: а) на задней по отношению к стабилизирующему агрегату (8) тележке (3) предусмотрен продольный маятник (15) для регистрации продольного уклонапути (2); б) предусмотрено устройство управления (14), выполненное для записи в память продольного уклона , для образования фактического высотного профиля (16) и для расчетного определения задней компенсирующей прямой (17), накладывающейся на высотный профиль (16) и отображающей заданное положение. 5. Машина по п.4, отличающаяся тем, что на передней по отношению к стабилизирующему агрегату (8) тележке (3) предусмотрен продольный маятник (15) для регистрации продольного уклонапути(2), при этом предусмотрено устройство управления (14), выполненное для записи в память продольного уклона , для образования фактического высотного профиля (18) и для расчетного определения передней компенсирующей прямой (19), накладывающейся на высотный профиль (18) и отображающей заданное положение. 6. Машина по одному из пп.4 или 5, отличающаяся тем, что на каждой тележке (3) предусмотрены два удаленных друг от друга в поперечном направлении пути продольных маятника (15) для регистрации продольного уклонапути (2). 7. Машина по одному из пп.4-6, отличающаяся тем, что расстояние (a) между средним и передним местами (11) сканирования измерительной системы (10) меньше расстояния (b) между средним и задним местами (11) сканирования.
МПК / Метки
МПК: E01B 35/08, E01B 27/20
Метки: способ, понижения, машина, пути, уровня
Код ссылки
<a href="https://eas.patents.su/5-15007-sposob-i-mashina-dlya-ponizheniya-urovnya-puti.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и машина для понижения уровня пути</a>
Способ корректировки погрешностей уровня пути
Номер патента: 10235
Опубликовано: 30.06.2008
Авторы: Тойрер Йозеф, Лихтбергер Бернхард
МПК: E01B 27/17, E01B 35/00
Метки: способ, пути, уровня, погрешностей, корректировки
Формула / Реферат:
1. Способ корректировки погрешностей (y-) уровня пути (2), при котором, приподняв путь во временное заданное положение (Xv), его подбивают, а затем в рамках стабилизации пути за счет приложения статической нагрузки в сочетании с поперечными колебаниями опускают с контролем в окончательное заданное положение (X), отличающийся тем, что путь (2) с коррелирующим с соответствующим значением погрешности (y-) уровня превышением (y+) приподнимают за...
Способ стабилизации и понижения уровня воды горного завального озера
Номер патента: 3627
Опубликовано: 28.08.2003
Автор: Папырин Леонид Павлович
МПК: E02B 3/02
Метки: завального, уровня, способ, стабилизации, воды, горного, понижения, озера
Формула / Реферат:
Способ стабилизации и понижения уровня воды в завальном горном озере, отличающийся тем, что с помощью воздействия электрическим током увеличивают водопроводимость закольматированных глинистыми образованиями обвальных отложений на верхнем бьефе завальной плотины, посредством чего увеличивают расход воды через эту плотину. ...
Сварочная машина и способ сварки рельсов пути
Номер патента: 8293
Опубликовано: 27.04.2007
Авторы: Тойрер Йозеф, Лихтбергер Бернхард
МПК: E01B 29/46, B23K 37/04
Метки: способ, машина, сварочная, сварки, пути, рельсов
Формула / Реферат:
1. Сварочная машина для сварки рельсов пути, содержащая сварочный аппарат (9), установленную с возможностью перемещения на тележках (3) раму (2), рельсотянущее устройство (12) для захвата свариваемых между собой концов (26) рельсов и установленные с возможностью поворота, образующие удаленные друг от друга в продольном направлении рельсов пары (16) зажимные клещи (17) с предусмотренными для прилегания к рельсу (4) зажимными губками (19), причем...
Способ корректировки положения пути и путевая машина
Номер патента: 13437
Опубликовано: 30.04.2010
Авторы: Лихтбергер Бернхард, Матзингер Эрвин, Тойрер Йозеф
МПК: E01B 27/17, E01B 27/20
Метки: путевая, машина, положения, корректировки, способ, пути
Формула / Реферат:
1. Способ корректировки положения пути, при котором покоящийся на щебеночном балласте, содержащий шпалы (6) путь (8) подбивают, подняв во временное заданное положение, а затем в рамках стабилизации пути опускают контролируемым образом в окончательное заданное положение, приложив действующую в вертикальном направлении нагрузку в сочетании с колебаниями, причем посредством вращающейся цилиндрической подметальной щетки (14) распределяют находящийся...
Сварочная машина для сварки рельсов пути
Номер патента: 8843
Опубликовано: 31.08.2007
Авторы: Лихтбергер Бернхард, Тойрер Йозеф
МПК: E01B 29/46, B23K 37/04
Метки: рельсов, сварки, машина, пути, сварочная
Формула / Реферат:
1. Сварочная машина (1) для сварки рельсов (4) пути (6), содержащая перемещаемую на рельсовых ходовых механизмах (3) раму (2), сварочный агрегат (9), рельсотянущее устройство (12) для захвата свариваемых между собой рельсов (4) и установленные на проходящей перпендикулярно продольному направлению рельсов поперечной траверсе (15) с возможностью поворота, образующие удаленные друг от друга в продольном направлении рельсов пары (16) зажимные клещи...
Предыдущий патент: Оборудование для переустановки валков прокатного стана
Следующий патент: Станция статического зондирования грунтов и датчик глубины погружения для станции статического зондирования грунтов
Случайный патент: Kcnq-открыватели калиевых каналов, применяемые для лечения или ослабления симптомов шизофрении