Роторный преобразователь расхода
Номер патента: 71
Опубликовано: 25.06.1998
Авторы: Скрипченко Анжела Григорьевна, Скрипченко Григорий Константинович

Формула / Реферат
1. Роторный преобразователь расхода, содержащий статор, роторы восьмиричной формы, соединенные синхронизирующими шестернями, отличающийся тем, что профиль рабочей поверхности каждого ротора определен уравнениями:
Yб1= -2284,3 + 1553,6·X - 421,7·Х2 + 57,1·Х3 - 3,9·Х4 + 0,1·Х5;
Yб2= 378,3 - 272,9·Х + 82,4·X2 - 12,3·X3 + 0,9·X4 - 0,02·X5;
________
Yт = 1,689·Ц154,8 - Х2,
где X, Yб1 - координаты точек бокового участка профиля ротора на интервале для Х О [5,5; 9,55],
X, Yб2 - координаты точек бокового участка профиля ротора на интервале для Х О [9,55; 4,76],
X, Yт - координаты точек торцевого участка профиля ротора на интервале для Х О [4,76; 0],
а профиль рабочей камеры статора определен геометрическими параметрами роторов - длиной большой и малой полуосей.
2. Роторный преобразователь расхода по п.1 отличается тем, что профиль рабочей камеры статора состоит из боковых и торцевых дуг различных радиусов, центры которых расположены на большой оси профиля рабочей камеры и смещены друг от друга на расстояние, равное полусумме большой и малой полуосей ротора, центры боковых дуг совпадают с центрами вращения роторов, центр торцевых дуг является центром симметрии рабочей камеры, боковые дуги определяются радиусом R1, равным длине большой полуоси ротора, торцевые дуги определяются радиусом R2, равным гипотенузе прямоугольного треугольника, образованного катетами, длина одного равна длине большой полуоси ротора, длина другого равна полусумме большой и малой полуосей ротора.
3. Роторный преобразователь расхода по п.1 отличается тем, что профиль рабочей камеры статора состоит из дуг окружности, центры которых расположены на большой оси профиля рабочей камеры и совпадают с центрами вращения роторов, и определяются радиусом R1, равным длине большой полуоси ротора, и двух отрезков, соединяющих эти дуги параллельно большой оси профиля рабочей камеры, величина которых равна сумме большой и малой полуосей роторов.
Текст
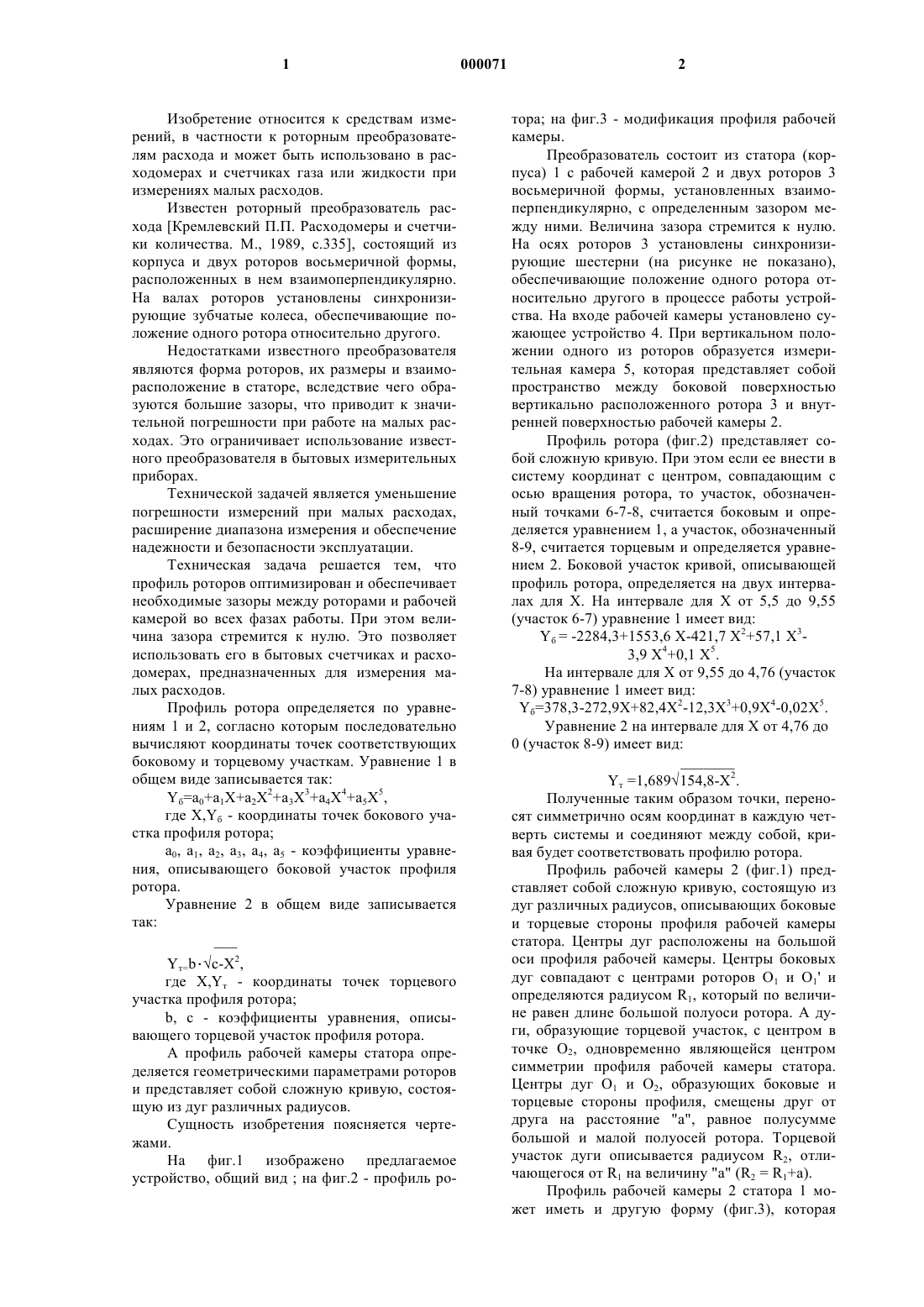
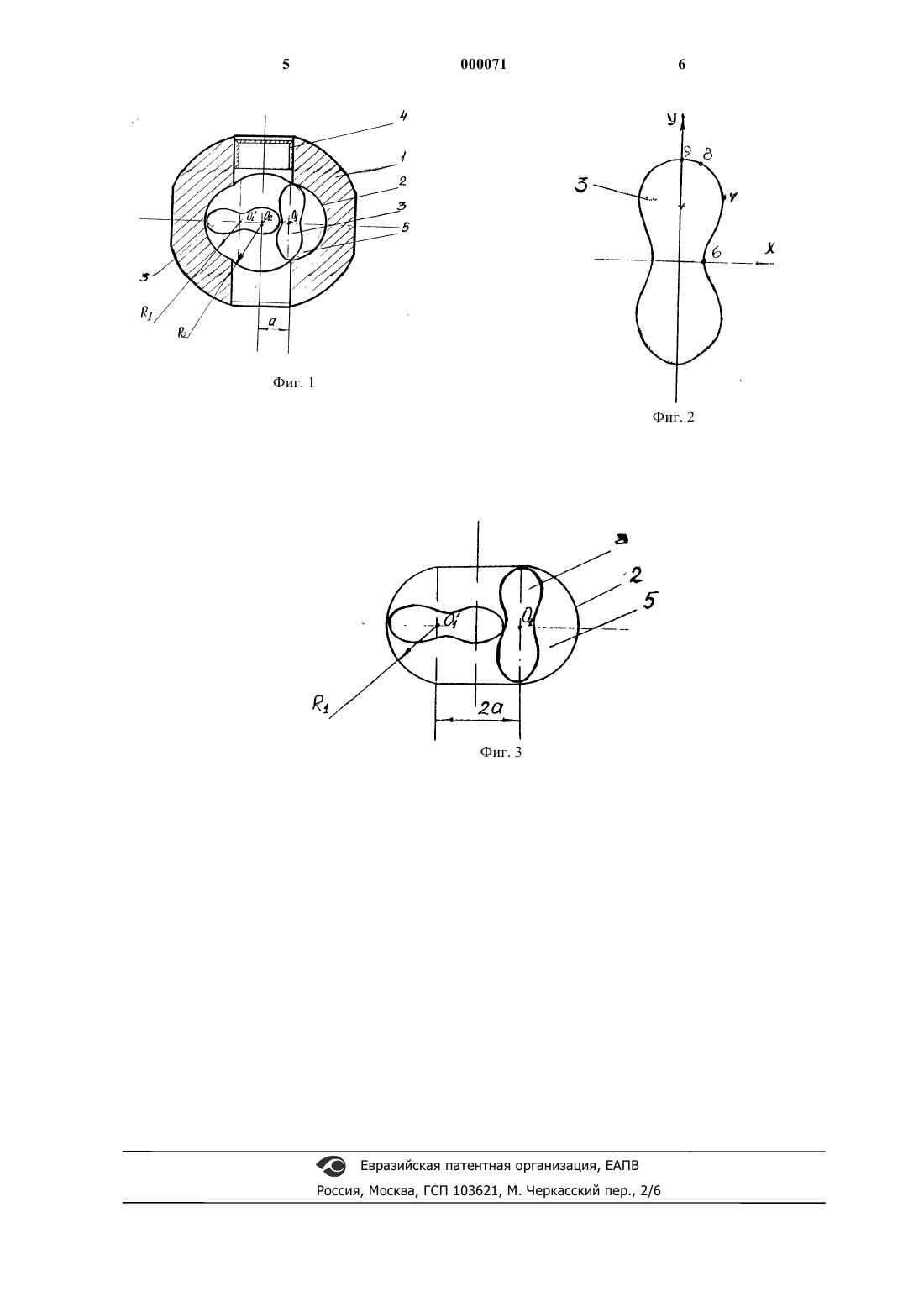
1 Изобретение относится к средствам измерений, в частности к роторным преобразователям расхода и может быть использовано в расходомерах и счетчиках газа или жидкости при измерениях малых расходов. Известен роторный преобразователь расхода [Кремлевский П.П. Расходомеры и счетчики количества. M., 1989, с.335], состоящий из корпуса и двух роторов восьмеричной формы,расположенных в нем взаимоперпендикулярно. На валах роторов установлены синхронизирующие зубчатые колеса, обеспечивающие положение одного ротора относительно другого. Недостатками известного преобразователя являются форма роторов, их размеры и взаиморасположение в статоре, вследствие чего образуются большие зазоры, что приводит к значительной погрешности при работе на малых расходах. Это ограничивает использование известного преобразователя в бытовых измерительных приборах. Технической задачей является уменьшение погрешности измерений при малых расходах,расширение диапазона измерения и обеспечение надежности и безопасности эксплуатации. Техническая задача решается тем, что профиль роторов оптимизирован и обеспечивает необходимые зазоры между роторами и рабочей камерой во всех фазах работы. При этом величина зазора стремится к нулю. Это позволяет использовать его в бытовых счетчиках и расходомерах, предназначенных для измерения малых расходов. Профиль ротора определяется по уравнениям 1 и 2, согласно которым последовательно вычисляют координаты точек соответствующих боковому и торцевому участкам. Уравнение 1 в общем виде записывается так:Yб=а 0+а 1 Х+а 2 Х 2+a3X3+а 4 Х 4+а 5X5,где Х,Yб - координаты точек бокового участка профиля ротора;a0, a1, а 2, а 3, а 4, a5 - коэффициенты уравнения, описывающего боковой участок профиля ротора. Уравнение 2 в общем виде записывается так:Yт=bc-X2,где Х,Yт - координаты точек торцевого участка профиля ротора;b, с - коэффициенты уравнения, описывающего торцевой участок профиля ротора. А профиль рабочей камеры статора определяется геометрическими параметрами роторов и представляет собой сложную кривую, состоящую из дуг различных радиусов. Сущность изобретения поясняется чертежами. На фиг.1 изображено предлагаемое устройство, общий вид ; на фиг.2 - профиль ро 000071 2 тора; на фиг.3 - модификация профиля рабочей камеры. Преобразователь состоит из статора (корпуса) 1 с рабочей камерой 2 и двух роторов 3 восьмеричной формы, установленных взаимоперпендикулярно, с определенным зазором между ними. Величина зазора стремится к нулю. На осях роторов 3 установлены синхронизирующие шестерни (на рисунке не показано),обеспечивающие положение одного ротора относительно другого в процессе работы устройства. На входе рабочей камеры установлено сужающее устройство 4. При вертикальном положении одного из роторов образуется измерительная камера 5, которая представляет собой пространство между боковой поверхностью вертикально расположенного ротора 3 и внутренней поверхностью рабочей камеры 2. Профиль ротора (фиг.2) представляет собой сложную кривую. При этом если ее внести в систему координат с центром, совпадающим с осью вращения ротора, то участок, обозначенный точками 6-7-8, считается боковым и определяется уравнением 1, а участок, обозначенный 8-9, считается торцевым и определяется уравнением 2. Боковой участок кривой, описывающей профиль ротора, определяется на двух интервалах для X. На интервале для Х от 5,5 до 9,55Yб = -2284,3+1553,6 X-421,7 X2+57,1 X33,9 Х 4+0,1 X5. На интервале для Х от 9,55 до 4,76 (участок 7-8) уравнение 1 имеет вид:Yб=378,3-272,9X+82,4 Х 2-12,3X3+0,9X4-0,02X5. Уравнение 2 на интервале для Х от 4,76 до 0 (участок 8-9) имеет вид:Yт =1,689154,8-X2. Полученные таким образом точки, переносят симметрично осям координат в каждую четверть системы и соединяют между собой, кривая будет соответствовать профилю ротора. Профиль рабочей камеры 2 (фиг.1) представляет собой сложную кривую, состоящую из дуг различных радиусов, описывающих боковые и торцевые стороны профиля рабочей камеры статора. Центры дуг расположены на большой оси профиля рабочей камеры. Центры боковых дуг совпадают с центрами роторов О 1 и O1' и определяются радиусом R1, который по величине равен длине большой полуоси ротора. А дуги, образующие торцевой участок, с центром в точке O2, одновременно являющейся центром симметрии профиля рабочей камеры статора. Центры дуг О 1 и O2, образующих боковые и торцевые стороны профиля, смещены друг от друга на расстояние "а", равное полусумме большой и малой полуосей ротора. Торцевой участок дуги описывается радиусом R2, отличающегося от R1 на величину "а" (R2 = R1+а). Профиль рабочей камеры 2 статора 1 может иметь и другую форму (фиг.3), которая 3 также определяется геометрическими параметрами роторов. И представляет собой кривую,состоящую из дуг окружности с центрами O1 и О 1', которые совпадают с осями вращения роторов и смещены друг от друга на расстояние "2 а",равное сумме большой и малой полуосей ротора, определяемых радиусом R1, равным величине большой полуоси ротора, и двух отрезков,соединяющих эти дуги параллельно большой оси рабочей камеры, величина которых равна расстоянию между центрами роторов. Устройство работает следующим образом. Газ или другое вещество, попадая в рабочую камеру 2 через сужающее устройство 4, за счет разности давления на входе и выходе преобразователя вынуждает вращаться вертикально расположенный ротор 3, который передает движение через синхронизирующие шестерни горизонтально расположенному ротору 3. Причем роторы вращаются в противоположных направлениях, в процессе работы устройства измерительная камера 5 образуется попеременно со стороны левого или правого вертикально расположенного ротора. Объем измерительной камеры 5 и скорость вращения роторов 3 определяют расход вещества или его количество. Применение предлагаемого преобразователя возможно в приборах для измерения малых расходов газа и жидкости, при этом рабочие органы должны быть изготовлены из одного металла или полимерного материала. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Роторный преобразователь расхода, содержащий статор, роторы восьмиричной формы,соединенные синхронизирующими шестернями,отличающийся тем, что профиль рабочей поверхности каждого ротора определен уравнениями:Yт = 1,689154,8 - Х 2,где X, Yб 1 - координаты точек бокового участка профиля ротора на интервале для Х[5,5; 9,55],X, Yб 2 - координаты точек бокового участка профиля ротора на интервале для Х[9,55; 4,76],X, Yт - координаты точек торцевого участка профиля ротора на интервале для Х[4,76; 0],а профиль рабочей камеры статора определен геометрическими параметрами роторов - длиной большой и малой полуосей. 2. Роторный преобразователь расхода по п.1 отличается тем, что профиль рабочей камеры статора состоит из боковых и торцевых дуг различных радиусов, центры которых расположены на большой оси профиля рабочей камеры и смещены друг от друга на расстояние, равное полусумме большой и малой полуосей ротора,центры боковых дуг совпадают с центрами вращения роторов, центр торцевых дуг является центром симметрии рабочей камеры, боковые дуги определяются радиусом R1, равным длине большой полуоси ротора, торцевые дуги определяются радиусом R2, равным гипотенузе прямоугольного треугольника, образованного катетами, длина одного равна длине большой полуоси ротора, длина другого равна полусумме большой и малой полуосей ротора. 3. Роторный преобразователь расхода по п.1 отличается тем, что профиль рабочей камеры статора состоит из дуг окружности, центры которых расположены на большой оси профиля рабочей камеры и совпадают с центрами вращения роторов, и определяются радиусом R1, равным длине большой полуоси ротора, и двух отрезков, соединяющих эти дуги параллельно большой оси профиля рабочей камеры, величина которых равна сумме большой и малой полуосей роторов.
МПК / Метки
МПК: G01F 3/02
Метки: роторный, преобразователь, расхода
Код ссылки
<a href="https://eas.patents.su/4-71-rotornyjj-preobrazovatel-rashoda.html" rel="bookmark" title="База патентов Евразийского Союза">Роторный преобразователь расхода</a>
Предыдущий патент: Упаковка-пищевой продукт
Следующий патент: Бициклическое конденсированное пиримидиновое соединение и его применение в качестве терапевтического агента
Случайный патент: Новый способ синтеза ивабрадина и его фармацевтически приемлемых кислотно-аддитивных солей