Способ определения места по меньшей мере двух воздействий

Формула / Реферат
1. Способ определения мест по меньшей мере двух воздействий F1 и F2, действующих одновременно или последовательно в течение короткого промежутка времени, на поверхность контактной пластины человекомашинного интерфейса с использованием по меньшей мере одного акустического датчика Si, где i=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), где i=1-n (n - количество датчиков), согласно которому:
a) устанавливают место х одного воздействия и
b) по каждому датчику определяют модифицированный воспринятый сигнал si'(t), в котором уменьшен вклад установленного воздействия, так что становится возможным определить место второго воздействия, и который основан на сравнении каждого из воспринятых сигналов si(t) с заданным эталонным сигналом rij(t), соответствующим эталонному воздействию Rj в месте j.
2. Способ по п.1, согласно которому на этапе а) устанавливают место самого сильного воздействия.
3. Способ по п.1 или 2, согласно которому указанное сравнение является корреляцией.
4. Способ по п.1 или 2, согласно которому этап b) содержит этапы, на которых:
b1) коррелируют каждый из воспринятых сигналов si(t) с эталонным сигналом rix(t), являющимся эталонным сигналом из множества эталонных сигналов rij(t), соответствующим эталонному воздействию вблизи, в частности максимально близко к месту x самого сильного воздействия, в частности с использованием преобразования Фурье Si(w) воспринятого сигнала si(t) и преобразования Фурье Rix(w) эталонного сигнала rix(t);
b2) согласовывают каждый результат корреляции с заданной функцией, в частности комплексной экспоненциальной функцией; и
b3) вычитают согласованную функцию из результата корреляции.
5. Способ по п.1 или 2, согласно которому на этапе b):
b1) коррелируют каждое из преобразований Фурье Si(w) воспринятых сигналов si(t) с преобразованием Фурье Rix(w) эталонного сигнала rix(t), являющегося эталонным сигналом из множества эталонных сигналов rij(t), который соответствует эталонному воздействию вблизи, в частности максимально близко к месту х самого сильного воздействия, и таким способом получают n результатов корреляции Si(w)Rix*(w);
b2) осредняют результаты корреляции Si(w)Rix*(w) по n датчикам;
b3) определяют фазу среднего n результатов корреляции Si(w)Rix*(w);
b4) умножают каждый из результатов корреляции Si(w)Rix*(w) на комплексно сопряженное число фазы среднего для получения таким способом модифицированных результатов корреляции;
b5) вычитают действительную часть из модифицированных результатов корреляции и
b6) умножают каждую остаточную часть модифицированных результатов корреляции на фазу среднего.
6. Способ по п.4 или 5, согласно которому на этапе b) также умножают результаты, полученные от преобразования Фурье Rix(w) эталонного сигнала rix(t) с целью получения таким способом модифицированного преобразования Фурье Si'(w), соответствующего модифицированному считанному сигналу si'(t).
7. Способ по любому из пп.1-6, также содержащий этап с), на котором устанавливают место следующего более слабого второго воздействия с использованием модифицированных воспринятых сигналов si'(t) или их преобразований Фурье Si'(w), причем на этапе с)
проводят корреляции модифицированных воспринятых сигналов si'(t) каждого датчика с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si'(w) и Rij(w); и
осредняют, предпочтительно во времени, результаты корреляции каждого эталонного сигнала rij(t) по указанным датчикам.
8. Способ по любому из пп.1-7, согласно которому этапы a)-c) повторяют с целью установления места следующего более слабого воздействия, причем каждый раз на этапе a) место воздействия, которое было установлено в предыдущем цикле, принимают как место x самого сильного воздействия, а на этапе b) новый модифицированный воспринятый сигнал определяют из определенного модифицированного воспринятого сигнала из предыдущего цикла.
9. Способ определения мест по меньшей мере двух воздействий F1 и F2, действующих одновременно или последовательно в течение короткого промежутка времени, на поверхность контактной пластины человекомашинного интерфейса с использованием по меньшей мере одной пары акустических датчиков Si и Sj, где i=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), где i=1-n (n - количество датчиков), согласно которому:
a) устанавливают место х одного воздействия и
b) определяют модифицированный сигнал на основании воспринятого сигнала si(t), в котором уменьшен вклад установленного воздействия, так что становится возможным определить место второго воздействия, и который, кроме того, основан на сравнении пар воспринятых сигналов si(t) и si'(t) пар датчиков si и si' и пар соответствующих заданных эталонных сигналов rij(t) и ri'j(t), соответствующих эталонному воздействию Rj.
10. Способ по п.9, согласно которому на этапе а) устанавливают место самого сильного воздействия.
11. Способ по п.9 или 10, согласно которому указанное сравнение является корреляцией.
12. Способ по п.9 или 10, согласно которому на этапе b):
b1) коррелируют преобразования Фурье двух воспринятых сигналов si(t) и si'(t) и таким способом получают первый результат корреляции Si(w)Si'(w)*;
b2) коррелируют преобразования Фурье соответствующих эталонных сигналов rix(t) и ri'x(t), которые соответствуют эталонному воздействию вблизи, в частности максимально близко к месту х самого сильного воздействия, и таким способом получают второй результат корреляции Rix(w)*Ri'x(w);
b3) коррелируют первый и второй результаты корреляции с целью получения третьего результата корреляции Si(w)Si'(w)*Rix(w)*Ri'x(w);
b4) осредняют действительную часть третьего результата корреляции по всем парам пар датчиков и вычитают это среднее из третьих результатов корреляции с целью получения Pii'x(w).
13. Способ по любому из пп.9 или 12, согласно которому на этапе с) установления места следующего более слабого второго воздействия
умножают Pii'x(w) на сумму RixRim*+Ri'x*Ri'm для всех эталонных воздействий Rm и для всех пар датчиков Si и Si';
выполняют преобразование Фурье над каждым из результатов и
суммируют отрицательную временную часть с положительной временной частью каждого преобразования Фурье.
14. Способ по п.13, согласно которому также на этапе с) осредняют, предпочтительно во времени, полученные суммы по всем парам датчиков Si и Si'.
15. Способ по любому из пп.9-14, согласно которому этапы а)-с) повторяют с целью установления места следующего более слабого воздействия, причем каждый раз на этапе а) место воздействия, которое было установлено на этапе с) предыдущего цикла, используют как место х самого сильного воздействия, а на этапе b) новый модифицированный сигнал определяют из определенного модифицированного сигнала из предыдущего цикла.
16. Способ по любому из пп.1-15, согласно которому на этапе а)
коррелируют воспринятый сигнал si(t) каждого датчика с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si(w) и Rij(w); и
осредняют, предпочтительно во времени, результаты корреляции каждого эталонного сигнала rij(t) по указанным датчикам.
17. Способ по любому из пп.1-15, согласно которому на этапе а)
коррелируют преобразования Фурье двух воспринятых сигналов si(t) и si'(t) и таким способом получают первый результат корреляции Si(w)Si'(w)*;
коррелируют преобразования Фурье эталонных сигналов rim(t) и ri'm(t) и таким способом получают вторые результаты корреляции Rim(w)*Ri'm(w);
коррелируют первый и второй результаты корреляции и таким способом получают третий результат корреляции Si(w)Si'(w)*Rim(w)*Ri'm(w) и
осредняют, предпочтительно во времени, результаты корреляции по парам датчиков Si и Si'.
18. Способ определения траектории непрерывного воздействия на поверхность с использованием способа по любому из пп.1-17.
19. Способ по п.18, согласно которому первое и второе воздействия соответствуют последовательным точкам на траектории.
20. Способ по любому из пп.1-19, согласно которому датчик представляет собой акустический датчик.
21. Компьютерный программный продукт, содержащий по меньшей мере один читаемый компьютером носитель, содержащий выполняемые компьютером команды на выполнение этапов способа по любому из пп.1-20.
22. Устройство для определения места по меньшей мере двух воздействий F1 и F2 на поверхность, содержащее
процессор, выполненный с возможностью осуществления способа по любому из пп.1-21; и
по меньшей мере один датчик, выполненный с возможностью передачи воспринятого сигнала, который представляет собой результат по меньшей мере двух воздействий, в процессор.

Текст
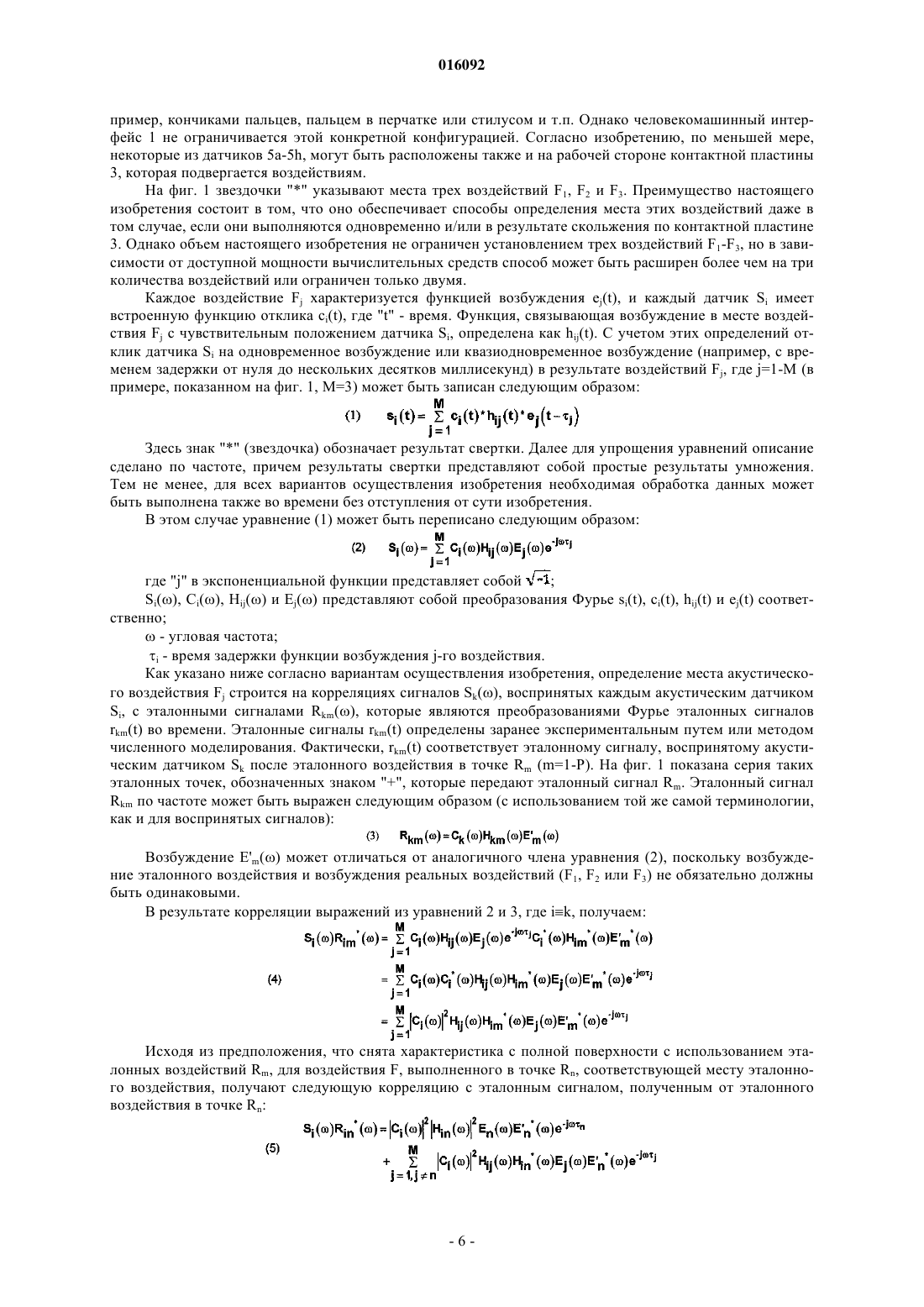
СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПО МЕНЬШЕЙ МЕРЕ ДВУХ ВОЗДЕЙСТВИЙ Настоящее изобретение относится к способу определения места по меньшей мере двух воздействийF1 и F2 на поверхности с использованием по меньшей мере одного датчика Si, где i=1-n, n количество датчиков, причем указанные воздействия F1 и F2 порождают сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), гдеi=1-n, n - количество датчиков. С целью определения одновременных воздействий с различными амплитудами способ содержит этапы, на которых устанавливают место х одного воздействия и определяют модифицированный воспринятый сигнал si'(t) каждого датчика, в котором уменьшен вклад установленного воздействия и который основан на сравнении, в частности корреляции,каждого из воспринятых сигналов si(t) с заданным эталонным сигналом rij(t), соответствующим эталонному воздействию Rj в месте j. Изобретение также относится к способам, основанным на парах воспринятых сигналов, и к устройству, осуществляющему способы согласно настоящему изобретению. Духейлле Реми, Щевин Оливье, Кир Инг Рос (FR) Можайский М.А. (RU)(71)(73) Заявитель и патентовладелец: ТАЙКО ЭЛЕКТРОНИКС СЕРВИСЕС ГМБХ (CH) 016092 Изобретение относится к способу определения места по меньшей мере двух воздействий на поверхность с использованием по меньшей мере одного датчика. Человекомашинные интерфейсы, использующие сенсорные технологии, основанные на распознавании звуковых волн, способных передаваться через контактную пластину, дают ряд преимуществ по сравнению с сенсорными человекомашинными интерфейсами, основанными на стандартных технологиях, например с емкостными интерфейсами. В частности, при использовании акустической технологии материал контактной пластины, на которую воздействует пользователь, не обязательно должен быть проводящим. Кроме того, не существует ограничений по способу воздействия, поскольку акустическая звуковая волна может быть создана любыми средствами, например кончиком пальца, пальцем в перчатке, стилусом и т.д. По существу, можно сказать, что легкое касание объекта создает в материале волновой спектр с формированием акустического идентификатора, который является уникальным для конкретного места воздействия. Акустический датчик, соединенный с компьютером или платой цифровой обработки сигналов, будет фиксировать звуковые колебания в среде, создавая соответствующий акустический идентификатор. Данная технология известна из публикации WO 03/107261 А 2. До настоящего времени данную технологию использовали для установления места одного касания на контактной поверхности и для инициирования соответствующего воздействия как функции установленного места легкого касания или сильного нажима. Однако современные технические средства требуют от человекомашинных интерфейсов способности устанавливать места многочисленных одновременных касаний и/или отслеживать траекторию входящих сигналов, соответствующих скольжению средств ввода по контактной поверхности, для обеспечения улучшенного и/или дружественного пользовательского интерфейса. Следовательно, целью настоящего изобретения является создание способа установления места более чем одного воздействия на контактную поверхность, в особенности когда входные воздействия выполняются с неодинаковой интенсивностью. Данная цель достигнута благодаря использованию способов согласно пп.1 и 7 формулы настоящего изобретения. В соответствии с отличительными признаками по п.1, способ определения места по меньшей мере двух воздействий F1 и F2 на поверхность с использованием по меньшей мере одного датчика Si, гдеi=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), гдеi=1-n (n - количество датчиков), согласно которому а) устанавливают место х одного, в частности самого сильного, воздействия и b) по каждому датчику определяют модифицированный воспринятый сигналsi'(t), в котором уменьшен вклад установленного воздействия и который основан на сравнении, в частности на корреляции, каждого из воспринятых сигналов si(t) с заданным эталонным сигналом rij(t). Заданный эталонный сигнал rij(t) соответствует сигналу, воспринятому датчиком Si после воздействия в контрольной точке Rj. Однако для обеспечения возможности определения места по меньшей мере двух воздействий создают характеристику контактной поверхности путем анализа сигналов, воспринятых различными датчиками вследствие ряда эталонных воздействий в заданных контрольных точках Rj. Кроме того, сигналы, воспринятые различными датчиками вследствие ряда эталонных воздействий, могут быть смоделированы методами цифрового моделирования (методом лучевого зондирования, методом конечных разностей, методом конечных элементов, методом граничных элементов и т.д.). В данном контексте понятие "самое сильное воздействие" также относится к случаю, когда по меньшей мере два воздействия имеют одинаковую силу. В этом случае способ обеспечивает возможность выбора одного из этих воздействий, которое в последующем рассматривают как "самое сильное воздействие". С целью оптимизации анализа данных, идентификации голоса, идентификации сигнала, от идентификации нервной системы и т.д. может быть проведено сравнение воспринятых сигналов с эталонным сигналом любым подходящим способом, например с проведением корреляции, в том числе модифицированных корреляций. Очевидно, что согласно настоящему изобретению определение модифицированного воспринятого сигнала возможно не только во времени, но и по частоте, в последнем случае с помощью преобразования Фурье воспринятых сигналов и эталонных сигналов. Способ согласно настоящему изобретению может применяться с целью установления места двух воздействий в случае, когда они действуют одновременно или последовательно в течение короткого промежутка времени, предпочтительно в интервале от нуля до нескольких десятков миллисекунд. Благодаря особым свойствам корреляции воспринятых сигналов с заданным эталонным сигналом действительно существует возможность получить модифицированный сигнал датчика, в котором влияние установленного, в частности самого сильного, воздействия может быть уменьшено таким образом,что становится возможным определить место второго самого сильного воздействия, причем даже в том случае, если оба воздействия выполнены одновременно.-1 016092 Предпочтительно на этапе b) возможно проведение корреляции каждого из воспринятых сигналовsj(t) с эталонным сигналом rix(t), который представляет собой эталонный сигнал из множества эталонных сигналов rij(t), соответствующий эталонному воздействию вблизи места x самого сильного воздействия, в частности максимально близко к этому месту, в частности с использованием преобразования Фурье Si воспринятого сигнала si(t) и преобразования Фурье Rix эталонного сигнала rix(t), согласование каждого результата корреляции с заданной функцией, в частности комплексной экспоненциальной функцией, и вычитание согласованной функции из результата корреляции. Благодаря корреляции с эталонным сигналом, максимально близким к самому сильному воздействию, может быть увеличен вклад самого сильного воздействия в полный сигнал. Согласно правилам распространения и правилам преобразования Фурье, этот вклад принимает форму комплексной экспоненциальной функции. Кроме того, влияния других воздействий, которые могли бы нарушить эту функцию,являются слишком малыми, поэтому проведение корреляции с помощью комплексной экспоненциальной функции обеспечивает аппроксимацию вклада самого сильного сигнала. Указанную аппроксимацию затем вычитают из полного сигнала так, что после вычитания вклад (вклады) от менее сильного воздействия (воздействий), по существу, является (являются) частью остаточного корреляционного значения. Указанное остаточное корреляционное значение затем используют для определения места следующего самого сильного воздействия. Для этой цели может быть использован тот же способ, который был использован в случае самого сильного воздействия. Очевидно, что указанный способ также может быть использован и в тех случаях, в которых возбуждения эталонного воздействия и реального воздействия являются одинаковыми или, по меньшей мере, сопоставимыми. В частности, последнее предположение допустимо, когда расстояние между реальным воздействием и эталонным воздействием меньше минимальной длины волны, которая зависит от максимального значения рабочей частоты. Согласно предпочтительному варианту осуществления изобретения на этапе b) может быть проведена корреляция каждого из преобразований Фурье Si воспринятых сигналов si(t) с преобразованием Фурье Rix эталонного сигнала rix(t), который является эталонным сигналом из множества эталонных сигналов rij(t), соответствующим эталонному воздействию вблизи, в частности максимально близко к месту x самого сильного воздействия, таким образом, получают n результатов корреляции:SiRix, осредняют результаты корреляции SiRix по n датчикам, определяют фазу среднего n результатов корреляции,SiRix, умножают каждый результат корреляции SiRix на комплексно сопряженное число фазы среднего для получения таким способом модифицированных результатов корреляции, вычитают действительную часть из модифицированных результатов корреляции и умножают каждую остаточную часть модифицированных результатов корреляции на фазу среднего. Как и в первом варианте осуществления изобретения, благодаря наличию различных результатов корреляции можно использовать эталонный сигнал от самого сильного воздействия с целью устранения его влияния на полный воспринятый сигнал. Кроме того, указанный способ особенно хорошо подходит в тех случаях, в которых форма эталонных воздействий и реальных воздействий во времени и/или их амплитуда несопоставимы. Преимущественно на этапе b) также могут быть умножены результаты, полученные с помощью преобразования Фурье Rix эталонного сигнала rix(t), с целью получения таким способом модифицированного преобразования Фурье Si', соответствующего модифицированному воспринятому сигналуsi'(t). Исключением вклада эталонного сигнала Rix получают модифицированный воспринятый сигнал,по меньшей мере, подобный сигналу, который может быть воспринят датчиком в случае, если самого сильного воздействия не будет. Таким образом, на основании этого модифицированного сигнала может быть определено следующее по силе воздействие с использованием стандартной процедуры. Выполнением этой задачи можно легко определить места двух самых сильных воздействий. Предпочтительно на этапе а) проводят корреляции воспринятого сигнала si(t) с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si и Rij, и осредняют результаты корреляции каждого эталонного сигнала rij(t) по числу датчиков. Взаимосвязь воспринятых сигналов с каждым из эталонных сигналов обеспечивает установление самого сильного воздействия, поскольку вклад самого сильного воздействия усиливается при проведении корреляции с эталонным сигналом, который является самым близким к самому сильному воздействию. Кроме того, осреднение по всем датчикам облегчает установление самого сильного воздействия. Согласно предпочтительному варианту осуществления изобретения вышеуказанные способы также могут содержать этап с) установления места следующего, более слабого второго воздействия с использованием модифицированных воспринятых сигналов si'(t) или их преобразований Фурье Si', причем на этапе с) проводят корреляции воспринятых модифицированных сигналов si'(t) каждого датчика с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si' и Rij, и осредняют, предпочтительно во времени, результаты корреляции каждого эталонного сигнала rij(t) по всем датчикам. Поскольку, по существу, устранено влияние самого сильного воздействия, указанный способ позволяет легко установить следующее по силе воздействие, потому что, как указано выше, корреляция с-2 016092 эталонным сигналом, являющимся максимально близким ко второму по силе воздействию, усиливает вклад второго по силе сигнала в модифицированный воспринятый сигнал так, что его установление становится возможным путем поиска максимального значения из ряда результатов корреляции. Осреднение по всем датчикам дополнительно способствует достоверному установлению места следующего по силе воздействия. Указанный способ может быть использован для установления второго воздействия, даже если его амплитуда приблизительно менее 0,01 самого сильного воздействия. Кроме того, указанный способ может быть использован для установления второго по силе воздействия даже в том случае, если оба воздействия имеют одинаковую силу. В частности, представляет интерес получение осреднения во времени. В этом режиме суммирование производят по амплитудам, и максимумы средних значений результатов корреляции уменьшаются. Вследствие этого усиливается контраст, который определяется как отношение результата корреляции к эталонному сигналу в месте, максимально близком к самому сильному воздействию по среднему значению других результатов корреляции, и таким образом, к эталонным сигналам в месте, находящемся еще дальше от самого сильного воздействия. Следовательно, осреднение во времени сравнивают с осреднением по частоте, при котором суммируют абсолютные значения, что обеспечивает лучший контраст, который весьма способствует установлению более слабых воздействий. Преимущественно этапы а)-с) можно повторять с целью установления места следующего более слабого воздействия, причем каждый раз на этапе а) место воздействия, которое было установлено в предыдущем цикле, принимают за место х самого сильного воздействия, а на этапе b) новый модифицированный воспринятый сигнал определяют на основе модифицированного воспринятого сигнала из предыдущего цикла. Следовательно, возможно установление не только двух воздействий, но также множества выполняемых одновременно воздействий, каждый раз с использованием вышеуказанного алгоритма. Кроме того, цель изобретения достигается благодаря использованию способа по п.7 формулы изобретения. Указанный способ заключается в определении места по меньшей мере двух воздействий F1 иF2 на поверхность с использованием по меньшей мере одного датчика Si, где i=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают сигнал, воспринятый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), где i=1-n (n - количество датчиков), согласно которому а) устанавливают место х одного, в частности самого сильного воздействия, и определяют модифицированный сигнал на основании воспринятых сигналов si(t), в котором уменьшен вклад самого сильного воздействия и который, кроме того, основан на сравнении, в частности, корреляции пар воспринятых сигналов si(t) и пар соответствующих заданных эталонных сигналов rij(t) и rij'(t). Определения и отличительные признаки, указанные выше для способа по п.1 формулы изобретения, также подходят ко второму способу. Указанный способ также обеспечивает получение модифицированного сигнала, в частности из корреляций воспринятых сигналов с эталонными сигналами. Вместо проведения корреляции сигналов каждого датчика с эталонными сигналами указанный способ использует корреляции двух датчиков. Преимущество этого способа состоит в том, что возбуждение за отрезок времени, эталонное возбуждение и реальное возбуждение от реального воздействия могут различаться. Кроме указанного отличия, при использовании данного способа могут быть получены те же самые преимущества, которые присущи вышеуказанному способу. Преимущественно на этапе b) проводят корреляции преобразований Фурье двух воспринятых сигналов si(t) и si'(t), и таким образом получают первый результат корреляции SiSi', проводят корреляции преобразований Фурье соответствующих эталонных сигналов rix(t) и ri'x(t), которые соответствуют эталонному воздействию вблизи, в частности максимально близко к месту самого сильного воздействия и, таким образом, получают второй результат корреляции RixRi'x, и проводят корреляцию первого и второго результатов корреляции с целью получения третьего результата корреляцииSiSi'RixRi'x, и проводят осреднение действительной части третьего результата корреляции по всем парам пар датчиков и вычитают это среднее из третьего результата корреляции с целью полученияPii'x. Этот способ использует преимущество, состоящее в том, что третий результат корреляции, в случае двух воздействий, содержит четыре члена, из которых один имеет отношение к самому сильному воздействию, другой относится к более слабому воздействию, и два смешанных члена. Согласно вышеуказанному вклад самого сильного воздействия должен быть уменьшен. Этого можно достичь исключением среднего действительной части третьего результата корреляции. Фактически, смешанные члены представляют собой комплексные числа, и для различных датчиков их действительная часть колеблется около нуля и, следовательно, составляет сравнительно малую величину относительно вклада самого сильного воздействия, который является чисто действительным числом. Далее, можно принять еще одно допущение, что вклад более слабого воздействия из-за корреляции пар является малым по сравнению с вкладом сильного воздействия, при этом среднее значение действительной части может быть приписано самому сильному воздействию. Поэтому исключение данной части из третьего результата корреляции обеспечивает усиление вкладов более слабых воздействий.-3 016092 Преимущественно, кроме того, способ может содержать этап с) установления места следующего более слабого второго воздействия, с умножением Pii'x на сумму (RixRim+Ri'xRi'm( для всех эталонных воздействий rm и для всех пар датчиков si и si', с проведением преобразований Фурье с каждым из результатов и суммированием отрицательной временной части с положительной временной частью каждого преобразования Фурье. Выполнение этих этапов обеспечивает установление места следующего более слабого воздействия путем простого поиска места эталонного воздействия, для которого получено максимальное значение. Далее данное место соответствует месту второго воздействия. Преимущественно также на этапе с) проводят осреднение, предпочтительно во времени, полученных сумм для всех пар датчиков Si и Si'. При осреднении по всем парам датчиков отношение сигнал/шум становится лучше (см. вышеуказанное по поводу контраста) с тем, чтобы установление более слабого воздействия стало возможным даже в случае очень низкого соотношения между амплитудами более слабого воздействия по сравнению с более сильным воздействием. Согласно предпочтительному варианту осуществления изобретения этапы а)-с) можно повторить с целью установления следующего более слабого воздействия, причем каждый раз на этапе а) место воздействия, которое было установлено на этапе с) предыдущего цикла, принимают как место х самого сильного воздействия, а на этапе b) определяют новый модифицированный сигнал на основании модифицированного сигнала из предыдущего цикла. Следовательно, с помощью данного способа возможно определение не только двух воздействий, в частности производимых одновременно воздействий, но также применение способа можно расширить на большее количество воздействий и, как следствие, может быть реализован мультисенсорный человекомашинный интерфейс. Преимущественно на этапе а) определяют корреляции воспринятого сигнала si(t) каждого датчика с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si и Rij, и осреднением, предпочтительно во времени, результатов корреляции для каждого эталонного сигнала rij(t) по всем датчикам. Отношение воспринятых сигналов к каждому из эталонных сигналов обеспечивает установление самого сильного воздействия, поскольку вклад самого сильного воздействия усилен корреляцией с эталонным сигналом, который является самым близким к самому сильному воздействию. Кроме того, осреднение по всем датчикам облегчает установление самого сильного воздействия. Согласно еще одному варианту осуществления изобретения на этапе а) проводят корреляции преобразований Фурье двух воспринятых сигналов si(t) и si'(t) и таким способом получают первый результат корреляции SiSi', проводят корреляции преобразований Фурье эталонных сигналов rim(t) и ri'm(t) и таким способом получают второй результат корреляции RimRi'm, проводят корреляции первого и второго результатов корреляции с целью получения третьего результата корреляцииSiSi'RimRi'mи осредняют, предпочтительно во времени, результаты корреляции по парам датчиков Si и Si'. К тому же такой способ установления самого сильного воздействия использует преимущество, связанное с особенностями корреляций, и определение места выполняется поиском максимального значения величины, осредненной по датчикам. Благодаря сопоставлению пар датчиков и пар эталонных сигналов улучшена разрешающая способность. Указанный способ также может быть использован на этапе с) для установления места следующего более слабого воздействия на основе модифицированных воспринятых сигналов. Согласно предпочтительному варианту осуществления изобретения способ может включать определение траектории непрерывного воздействия на поверхность с использованием вышеуказанного способа. Данное преимущество обеспечивается благодаря использованию вышеуказанных алгоритмов, которые используются для определения двух воздействий, например выполненных в разных местах, но по сути одновременно, для определения траектории с тем, чтобы определить направление скольжения пальца по поверхности. Предпочтительно первое и второе воздействия соответствуют последовательным точкам на траектории. Таким образом, без каких-либо изменений способ, используемый для определения одновременных воздействий, также подходит для определения траектории. Согласно предпочтительному варианту осуществления изобретения датчик может быть акустическим датчиком. В данном контексте "акустический датчик" означает датчик, чувствительный к акустическим сигналам, например пьезоэлектрический датчик, пьезорезистивный датчик, магнитострикционные датчики, емкостные датчики перемещения, лазерные интерференционные датчики, электромагнитные акустические датчики (ЕМАТ). Очевидно, что установление более чем одного воздействия, в частности,может быть выполнено путем обработки акустических сигналов. Настоящее изобретение также относится к компьютерному программному продукту, включающему по меньшей мере один читаемый компьютером носитель, содержащий выполняемые компьютером команды на выполнение вышеуказанных этапов.-4 016092 Цель настоящего изобретения также достигается созданием устройства для определения места по меньшей мере двух воздействий F1 и F2 на поверхность, содержащего процессор и по меньшей мере один датчик, выполненный с возможностью передачи воспринятых сигналов, являющихся результатом по меньшей мере двух воздействий, в процессор, причем процессор выполнен с возможностью осуществления способа по одному из пп.1-17 формулы изобретения. Благодаря использованию данного устройства обеспечиваются те же преимущества, которые дает использование вышеуказанных способов. Далее следует более полное описание настоящего изобретения со ссылкой на прилагаемые чертежи. На фиг. 1 схематично изображены контактная пластина и акустические датчики в соответствии с подробным описанием различных вариантов осуществления изобретения. На фиг. 2 показаны максимумы корреляционной функции воспринятых сигналов с заданными эталонными сигналами. На фиг. 3 показаны максимумы корреляционной функции на примере, приведенном для лучшего понимания изобретения, с 8 различными акустическими датчиками. На фиг. 4 проиллюстрировано влияние осреднения результатов, полученных на фиг. 3, на контраст. На фиг. 5A-5D показаны максимумы корреляции в случае двух воздействий для различных отношений амплитуды. На фиг. 6 проиллюстрирован первый вариант осуществления изобретения. На фиг. 7 подробно проиллюстрирован второй этап первого варианта осуществления изобретения. На фиг. 8 показаны максимумы корреляционных функций SiRim для всех акустических датчиков. На фиг. 9 показано среднее максимумов корреляционных функций SiRim. На фиг. 10 показаны максимумы корреляционных функций Si'Rim с использованием модифицированных воспринятых сигналов для всех акустических датчиков с целью установления места более слабого воздействия. На фиг. 11 проиллюстрировано среднее максимумов корреляционных функций Si'Rim. На фиг. 12A-12H показаны результаты, полученные в соответствии с первым вариантом осуществления изобретения для двух воздействий с отношением амплитуд 1; 0,7; 0,3 и 0,01. На фиг. 13 подробно проиллюстрирован второй этап второго варианта осуществления изобретения. На фиг. 14 проиллюстрированы этапы обработки в соответствии с третьим вариантом осуществления изобретения. На фиг. 15 проиллюстрированы результаты, которые используют для определения самого сильного воздействия с проведением корреляций пар акустических датчиков и пар эталонных сигналов. На фиг. 16 проиллюстрировано среднее максимумов корреляции, показанных на фиг. 15. На фиг. 17 проиллюстрированы результаты, которые используют для определения второго воздействия с применением модифицированных корреляций пар акустических датчиков и пар эталонных сигналов. На фиг. 18 проиллюстрировано среднее максимумов корреляции, показанных на фиг. 17. На фиг. 1 схематически показан человекомашинный интерфейс 1, содержащий контактную пластину 3 и акустические датчики 5 а-5h, причем здесь показано восемь акустических датчиков. Выводы акустических датчиков 5 а-5h подсоединены к процессору (не показан), выполненному с возможностью анализа сигналов, воспринятых акустическими датчиками 5 а-5h. Акустические датчики обычно содержат электронный блок регулировки с усилителем и фильтром, и в конечном счете аналоговые сигналы преобразуются в цифровые с использованием аналого-цифрового преобразователя перед передачей их в процессор. Человекомашинный интерфейс 1 подобного рода основан на распознавании звуковых волн, которые передаются через контактную пластину 3 и принимаются акустическими датчиками 5 а-5h. Он находит применение во многих типах устройств, таких как торговые автоматы, персональные компьютеры,интерфейсы промышленных машин, интерфейсы бытовой техники или любого другого оборудования,или в других ситуациях, требующих человекомашинного интерфейса для ввода информации в устройство. Поскольку идентификация ввода основана на акустических волнах, материал контактной пластины 3 может быть любым материалом или комбинацией материалов, через которые могут передаваться акустические волны, например стекло, пластмасса или дерево. Кроме того, форма контактной пластины 3 не обязательно должна быть прямоугольной, как изображено на чертеже, но может иметь любую форму,например изогнутую. В качестве акустических датчиков 5 а-5h использованы пьезоэлектрические датчики. Однако также могут быть использованы чувствительные к давлению датчики другого типа, например пьезорезистивные датчики, магнитострикционные датчики, емкостные датчики перемещения, лазерные интерференционные датчики, электромагнитные акустические датчики (ЕМАТ). На фиг. 1 показаны восемь акустических датчиков 5a-5h, однако в зависимости от необходимой точности или размеров человекомашинного интерфейса 1 может быть использовано большее или меньшее количество акустических датчиков. В указанном примере акустические датчики 5 а-5h показаны пунктирной линией для указания, что они расположены с обратной стороны контактной пластины 3, тогда как передняя сторона предназначена для того, чтобы пользователь мог выполнить воздействие, на-5 016092 пример, кончиками пальцев, пальцем в перчатке или стилусом и т.п. Однако человекомашинный интерфейс 1 не ограничивается этой конкретной конфигурацией. Согласно изобретению, по меньшей мере,некоторые из датчиков 5a-5h, могут быть расположены также и на рабочей стороне контактной пластины 3, которая подвергается воздействиям. На фиг. 1 звездочки указывают места трех воздействий F1, F2 и F3. Преимущество настоящего изобретения состоит в том, что оно обеспечивает способы определения места этих воздействий даже в том случае, если они выполняются одновременно и/или в результате скольжения по контактной пластине 3. Однако объем настоящего изобретения не ограничен установлением трех воздействий F1-F3, но в зависимости от доступной мощности вычислительных средств способ может быть расширен более чем на три количества воздействий или ограничен только двумя. Каждое воздействие Fj характеризуется функцией возбуждения ej(t), и каждый датчик Si имеет встроенную функцию отклика ci(t), где "t" - время. Функция, связывающая возбуждение в месте воздействия Fj с чувствительным положением датчика Si, определена как hij(t). С учетом этих определений отклик датчика Si на одновременное возбуждение или квазиодновременное возбуждение (например, с временем задержки от нуля до нескольких десятков миллисекунд) в результате воздействий Fj, где j=1-М (в примере, показанном на фиг. 1, М=3) может быть записан следующим образом: Здесь знак (звездочка) обозначает результат свертки. Далее для упрощения уравнений описание сделано по частоте, причем результаты свертки представляют собой простые результаты умножения. Тем не менее, для всех вариантов осуществления изобретения необходимая обработка данных может быть выполнена также во времени без отступления от сути изобретения. В этом случае уравнение (1) может быть переписано следующим образом:; где "j" в экспоненциальной функции представляет собойSi, Ci, Hij и Ej представляют собой преобразования Фурье si(t), ci(t), hij(t) и ej(t) соответственно;- угловая частота;i - время задержки функции возбуждения j-го воздействия. Как указано ниже согласно вариантам осуществления изобретения, определение места акустического воздействия Fj строится на корреляциях сигналов Sk, воспринятых каждым акустическим датчикомSi, с эталонными сигналами Rkm, которые являются преобразованиями Фурье эталонных сигналовrkm(t) во времени. Эталонные сигналы rkm(t) определены заранее экспериментальным путем или методом численного моделирования. Фактически, rkm(t) соответствует эталонному сигналу, воспринятому акустическим датчиком Sk после эталонного воздействия в точке Rm (m=1-Р). На фиг. 1 показана серия таких эталонных точек, обозначенных знаком "+", которые передают эталонный сигнал Rm. Эталонный сигналRkm по частоте может быть выражен следующим образом (с использованием той же самой терминологии,как и для воспринятых сигналов): Возбуждение Е'm может отличаться от аналогичного члена уравнения (2), поскольку возбуждение эталонного воздействия и возбуждения реальных воздействий (F1, F2 или F3) не обязательно должны быть одинаковыми. В результате корреляции выражений из уравнений 2 и 3, где ik, получаем: Исходя из предположения, что снята характеристика с полной поверхности с использованием эталонных воздействий Rm, для воздействия F, выполненного в точке Rn, соответствующей месту эталонного воздействия, получают следующую корреляцию с эталонным сигналом, полученным от эталонного воздействия в точке Rn:-6 016092 Во времени, первый член уравнения (5) имеет максимум корреляции за время t=n, который является явно выраженным в случае, когда возбуждения эталонного воздействия и воздействия, по меньшей мере, одинаковы во времени: EnЕ'n. В случае, когда они различаются, максимальное значение будет менее выраженным. Сумма второго члена обеспечивает корреляцию, имеющую вторичные максимумы, значения которых в высокой степени зависят от качества передачи акустической волны через контактную пластину 3. В зависимости от симметрии используемого материала эти вторые максимумы могут быть относительно существенными, тем не менее их влияние на максимумы первого члена ничтожно. Предпочтительно для улучшения определения места воздействий сигналы нормализуют по частоте таким образом, что спектральные амплитуды имеют значение 1, и всю информацию несет фаза. В этом случае автокорреляция сигнала со спектральной амплитудой 1 дает максимум корреляции 1. В свою очередь, взаимная корреляция различных сигналов единичных спектральных амплитуд имеет максимум корреляции меньше 1. Поступая таким образом, устраняют зависимость максимума корреляции от спектральной зоны или спектральных зон, в которых спектральная амплитуда высока, так что фактически другие спектральные амплитуды, которые с точки зрения локализации информации являются значимыми, но амплитуда которых ниже, преимущественно могут быть приняты во внимание. На фиг. 2 показаны максимумы корреляционных функций для каждого эталонного воздействия Rm(как показано на фиг. 1, m=1-Р) для одного акустического датчика Si из множества акустических датчиков 5 а-5h при условии, что произошло только одно воздействие в точке, идентичное эталонному воздействию в точке Rn. Эти значения получены из уравнения (4) для количества воздействий М=1 и соответствуют максимумам результата корреляции, полученного во времени в результате обратного преобразования Фурье уравнения (4) для всех заданных эталонных сигналов rim (с нижним индексом i, соответствующим рассматриваемому акустическому датчику). На фиг. 2 четко показано, что максимум максимумов корреляционных функций получен для контрольной точки Rn. Иначе говоря, определение места максимума указывает место воздействия F на контактной пластине 3. Однако также имеют значение максимумы корреляционных функций в других контрольных точкахRm (при mn). В частности, среднее максимумов корреляционных функций ci-av (где i соответствует рассматриваемому акустическому датчику Si) в контрольных точках, отличных от контрольной точки Rn,играет роль в случае, если должен быть проведен анализ для определения места по меньшей мере двух одновременных воздействий. Значение ci-av строго зависит от длительности сигналов, и чем длительнее воздействие, тем ниже это значение. Использование более одного акустического датчика (например, 8, как показано на фиг. 1) позволяет улучшить разрешающую способность и надежность определения места. При использовании множества акустических датчиков для определения места одного воздействия существуют две возможности, позволяющие комбинировать результаты корреляции. Прежде всего, результаты корреляции Ci, где i=1-n (n количество акустических датчиков Si), могут быть осреднены по частоте или во времени после обратного преобразования Фурье результатов корреляции из уравнения (5) для всех эталонных сигналов Rim, гдеm=1-P. В первом случае контраст, который определяется как отношение между максимальным значением результатов корреляции, как показано на фиг. 2, и средним значением Ciav, остается постоянным, поскольку производится суммирование абсолютных значений. Во втором случае суммирование производят по амплитуде, и уменьшаются максимумы средних значений результатов корреляции во времени. Таким образом, использование этого второго способа осреднения (далее именуемого осреднением во времени) обеспечивает получение улучшенного контраста, когда результаты множества акустических датчиков объединяют. На фиг. 3 показаны экспериментальные результаты вышеуказанных этапов обработки данных в случае одиночного воздействия F на контактную пластину 3. Результаты были получены для стеклянной пластины (в качестве контактной пластины 3) размерами 4003004,5 мм с использованием восьми акустических датчиков (здесь пьезоэлектрических датчиков), установленных, как показано на фиг. 1, а именно по два датчика вблизи каждого края со стороны контактной пластины, обратной стороне воздействия. Эталонные воздействия Rm были определены по всей поверхности стеклянной пластины с шагом выборки 10 мм в обоих направлениях Частота выборки составила 48 кГц с погрешностью 12 бит. На фиг. 3 показаны корреляции воспринятых сигналов Si со всеми эталонными сигналами Rim для каждого из восьми акустических датчиков Si при воздействии вблизи центра стеклянной пластины,используемой в качестве контактной пластины 3. Контраст, наблюдаемый в данном эксперименте, составил примерно 2,4. Со средним значением, показанным на фиг. 4, восьми акустических датчиков, при использовании осреднения во времени, улучшенный контраст составил примерно 5,7 и даже получено более четкое место воздействия. Как указано выше, а также подтверждено экспериментальным путем, контраст улучшается с увеличением количества акустических датчиков.-7 016092 В указанных экспериментах контраст составил 3,7 для двух датчиков, 4,8 - для четырех датчиков и 5,7 - для восьми датчиков. Далее следует описание случая, когда на контактную пластину 3 оказывают более одного воздействия. На фиг. 5A-5D показано среднее максимумов результатов корреляции воспринятых сигналов Si со всеми эталонными сигналами Rim в случае двух одновременных воздействий. На фиг. 5A показан результат в случае, когда отношение амплитуд возбуждения двух воздействий равно 1; на фиг. 5B показан случай, когда это отношение равно 0,7; на фиг. 5C - когда отношение равно 0,3 и на фиг. 5D - когда отношение равно 0,1. Несмотря на то что на фиг. 5A и 5B показаны случаи, для которых все же обеспечивается возможность установления места двух воздействий, а именно двух точек внизу с левой стороны, показывающих два отдельных максимума, построенных на результатах корреляции уравнений (4) и(5), установление места более слабого воздействия уже невозможно, если отношение амплитуд двух воздействий превышает некоторый порог, как показано на фиг. 5C и 5D, на которых виден один максимум в месте самого сильного воздействия. Фактически, в случае существенной разницы между амплитудами воздействий максимум корреляции более слабого воздействия настолько мал, что он достигает вышеуказанного среднего значения Ciav и, следовательно, сливается с фоном. Первый вариант осуществления изобретения. На фиг. 6 показан способ определения места по меньшей мере двух воздействий F1 и F2 на поверхность, в данном случае на контактную пластину 3, с использованием по меньшей мере одного акустического датчика Si, где i=1-n (n - количество акустических датчиков), в соответствии с первым вариантом осуществления изобретения, который преодолевает вышеуказанные недостатки уровня техники. Этап S1 заключается в установлении места x одного воздействия. В этом варианте осуществления изобретения устанавливают самое сильное воздействие, однако объем настоящего изобретения не ограничен установлением самого сильного воздействия. Согласно первому варианту осуществления изобретения этап S1, соответствующий этапу а) в п.1 формулы изобретения, содержит, как подробно описано выше, определение корреляций сигналов si(t), воспринятых каждым акустическим датчиком 5a-5h, с каждым из эталонных сигналов rij(t), в частности с использованием соответствующих преобразований Фурье Si и Rij с целью упрощения вычислений. Кроме того, на этапе S1 выполняют осреднение результатов корреляции каждого из эталонных сигналов rij(t) по акустическим датчикам Si, предпочтительно во времени. Результатом выполнения этих этапов способа являются данные, показанные на фиг. 5A5D. Затем определяют место х самого сильного воздействия на контактной пластине 3 путем установления максимального значения осредненных максимумов корреляции. Согласно первому варианту осуществления изобретения этап S2, соответствующий этапу b) в п.1 формулы изобретения, содержит определение модифицированного воспринятого сигнала si'(t) для каждого акустического датчика Si, в котором уменьшен вклад самого сильного воздействия в месте х. Этот этап основан на корреляции каждого из воспринятых сигналов si(t) с заданным эталонным сигналом rij(t),соответствующим эталонному воздействию в точке Rj. Согласно первому варианту осуществления изобретения этап S2 содержит последовательность этапов обработки данных, которые показаны на фиг. 7. Этап S21 заключается в проведении корреляции каждого из воспринятых сигналов si(t) с эталонным сигналом rix(t), который является эталонным сигналом, соответствующим эталонному воздействию в месте x самого сильного воздействия. Вышеуказанную корреляцию предпочтительно выполняют умножением преобразования Фурье Si воспринятого сигнала si(t) на преобразование Фурье Rix эталонного сигнала rix(t). Затем на этапе S22 каждый из результатов корреляции согласовывают с комплексной экспоненциальной функцией, и затем на этапе S23 согласованные функции вычитают из соответствующего результата корреляции. Затем с целью получения модифицированного преобразования Фурье Si', соответствующего модифицированному воспринятому сигналу si'(t), на этапе S24 полученные результаты умножают на преобразование Фурье Rix эталонного сигнала rix(t). Затем на этапе S3 может быть определено место следующего по силе воздействия на основе модифицированного воспринятого сигнала таким же способом, каким было получено самое сильное воздействие на этапе S1. Далее следует подробное описание роли вычитания согласованной комплексной экспоненциальной функции для двух одновременных воздействий F1 и F2. Ликвидация вклада самого сильного воздействия вычитанием согласованной комплексной экспоненциальной функции основана на следующих рассуждениях. Исходя из предположения, что первое и второе воздействия F1 и F2 выполнены в двух местах, соответствующих двум точкам Rx и Ry эталонных воздействий, уравнение (5) принимает вид где Rix - комплексно сопряженное число преобразования Фурье эталонного сигнала Rx, соответствующего месту х самого сильного воздействия.-8 016092 Кроме того, считается, что преобразование Фурье функции возбуждения Ех идентично Е'х, что означает, что заданные воздействия и воздействия F1 и F2 имеют одинаковую форму во времени. Из уравнения (6) следует, что в случае слабого второго воздействия второй его член с фазой более слабого воздействия в месте y является малым по сравнению с первым членом с информацией по фазе первого воздействия в месте x. Это происходит из-за отношения Ey/Ex, которое меньше 1. В случае сильного первого воздействия по сравнению со вторым воздействием информация, касающаяся второго воздействия, потонет в фоновом шуме. Следовательно, предложенный способ согласно этому варианту осуществления изобретения имеет целью устранение или, по меньшей мере, уменьшение вклада первого члена уравнения (6) таким образом, что информация, касающаяся второго воздействия и места этого воздействия на контактной пластине, становится доступной. Переменные i12 и i1 представлены следующим образом: уравнение (6) может быть переписано следующим образом: мало по сравнению с 1, уравнение (8) становится первой аппроксимациейexp (-j) может быть использована с целью согласования SiRix каждого акустического датчика Si и,следовательно, для определения значений х и ix. Вычитанием согласованной функции exp (-j) из результата корреляции SiRix получаем Затем этот результат умножают на Rix с целью получения таким способом преобразования Фурье модифицированного воспринятого сигнала: Как можно видеть, фаза второго члена в сумме зависит только от фазы сигнала воздействия F2. С учетом того что величинамала по сравнению со вторым членом, уменьшен вклад первого воздействия и получен модифицированный воспринятый сигнал, являющийся преобразованием Фурье Si'. Для установления места второго воздействия Si', в уравнении (11) умножают на эталонные сигналыRim и определяют максимальное значение максимумов этих результатов корреляции. Тогда максимум указывает место на контактной пластине 3, в котором произошло второе по силе воздействие. На фиг. 8-11 показаны экспериментальные результаты для двух одновременных воздействий в той же самой экспериментальной конфигурации, как указано выше для случая одного воздействия. Здесь отношение амплитуд более слабого воздействия и более сильного воздействия равно 1/10. На фиг. 8 показаны максимумы результатов корреляции SiRim для каждого из восьми акустических датчиков, расположенных у края контактной пластины 3. На фиг. 9 показаны максимумы результатов корреляции среднего, вычисленного осреднением во времени. Как показано на фиг. 8 и 9, различные диаграммы результатов корреляции показывают один максимум несмотря на то, что на контактную пластину 3 оказаны два воздействия. На фиг. 10 показаны результаты, полученные с использованием вышеуказанных этапов от S21 доS 24 способа согласно первому варианту осуществления изобретения. На фиг. 10 еще раз показаны максимумы результатов корреляции, но они теперь основаны на модифицированных воспринятых сигналахSi', а на фиг. 11 показано соответствующее среднее по всем акустическим датчикам (снова осредненное во времени). Даже при том что на фиг. 9 не видно второго воздействия (тонет в фоновом шуме), оно может быть отчетливо установлено путем поиска максимумов корреляционных максимумов, как показано на фиг. 10 и 11, поскольку использован модифицированный воспринятый сигнал, в котором уменьшен вклад самого сильного воздействия. Как следствие, место второго воздействия, которое было оказано с силой 1/10 от силы первого воздействия, может быть установлено на верхнем правом крае контактной пластины 3.-9 016092 На фиг. 8-11 показан случай двух воздействий с отношением амплитуд 1/10. Тем не менее способ согласно первому варианту осуществления изобретения функционирует в широком диапазоне отношений амплитуд, как это видно из фиг. 12A-12H. Результаты, показанные на фиг. 12A-12H, были получены тем же способом, как и в случае, показанном на фиг. 8-11, с единственным различием в амплитуде воздействий. На фиг. 12A и 12E показаны результаты определения места самого сильного и "более слабого" воздействия при отношении амплитуд, равном 1; на фиг. 12B и 12F показаны места самого сильного и более слабого воздействия при отношении амплитуд 0,7; на фиг. 12C и 12D при отношении амплитуд 0,3 и на фиг. 12D и 12H при отношении амплитуд всего 0,01. На фиг. 12 показано, что первый вариант осуществления изобретения работает даже при отношении, равном 1. Однако, как показано на фиг. 12A, в этом случае места двух воздействий видимы одновременно, что происходит также и в случае отношения 0,7. Тем не менее с использованием модифицированного воспринятого сигнала влияние одного воздействия может быть уменьшено, что приводит к точному установлению места второго воздействия, поскольку контраст на фиг. 12E и 12F выше, чем в случае, соответствующем фиг. 12A и 12B. Второй вариант осуществления изобретения. Второй вариант осуществления изобретения также относится к способу определения места по меньшей мере двух воздействий F1 и F2 на поверхность, подобную контактной пластине 3, с использованием по меньшей мере одного акустического датчика Si, где i=1-n (n - количество акустических датчиков), причем указанные воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним акустическим датчиком Si, при этом каждый акустический датчик обеспечивает воспринятый сигнал si(t), где i=1-n, где n - количество акустических датчиков. Различие между первым и вторым вариантами осуществления изобретения состоит в том, что на этапе S2, как показано на фиг. 6, модифицированный воспринятый сигнал si' определяют другим способом, который, по сравнению с первым вариантом осуществления изобретения, обеспечивает улучшенное разрешение во времени и в пространстве и преимущественно находит свое применение в случае, когда форма возбуждений пользовательских воздействий отличается от формы заданных эталонных воздействий. Этапы S2 согласно второму варианту осуществления изобретения показаны на фиг. 13. Таким образом, второй вариант осуществления изобретения, по существу, относится к случаям, где ЕхЕ'х. Тем не менее очевидно, что способ согласно второму варианту осуществления изобретения также может быть использован в случае, когда пользовательское воздействие и эталонное воздействие имеют,по существу, одну и ту же форму. Для двух воздействий уравнение (5) может быть переписано следующим образом: причем, как и в первом варианте осуществления изобретения, считается, что самое сильное воздействие произошло в точке Rx, так что свертка снова может быть выполнена умножением преобразования Фурье воспринятого сигнала Si на Rix. С учетом допущения, что второе воздействие намного слабее первого (ЕуЕх), уравнение (12) может быть аппроксимировано следующим образом: Таким образом, этап S210 заключается в определении результатов корреляции SiRix с Rix, соответствующим преобразованию Фурье эталонного сигнала в точке Rx (подобно этапу S21, как показано на фиг. 7). На следующем этапе S211 результаты корреляции SiRix осредняют по n акустическим датчикам Si(в данном примере n=8) и по всем частотам с целью оптимизации коэффициента контрастности. Затем следует этап S212, который заключается в определении фазы среднего результатов корреляции SiRix. Это значение фазы, по существу, соответствует значению фазы в уравнении (13), поскольку фаза функции возбуждения уникальна и обнаружена всеми датчиками Si. Вкладом фазы второго члена в уравнении (12) можно пренебречь, поскольку второй член мал по сравнению с первым и, кроме того,благодаря осреднению дополнительно уменьшен. Таким образом, продолжение применения этого способа может действительно привести к определению фазы первого члена. Затем следует этап S213, который заключается в умножении каждого результата корреляции SiRix на комплексное сопряженное фазы среднего результатов корреляции SiRix с целью получения таким способом модифицированных результатов корреляции: где Correc соответствует вышеуказанному комплексному сопряженному фазы среднего. Поскольку предполагается, что ЕуЕх, действительная часть уравнения (14) превалирует благодаря первому его члену таким образом, что вычитанием (на этапе S214) действительной части из уравнения(14) может быть уменьшен или даже исключен вклад первого члена, обусловленный самым сильным воздействием.- 10016092 Затем на этапе S215 остаточные части модифицированных результатов корреляции умножают на фазу среднего для получения таким способом: Для окончательного получения желаемого модифицированного воспринятого сигнала Si' результаты, полученные на этапе S115, снова умножают на преобразование Фурье Rix эталонного сигналаrix(t) для получения таким способом модифицированного воспринятого сигнала, в котором уменьшен вклад самого сильного воздействия: Для получения места второго воздействия может быть снова выполнен этап S3, как в первом варианте осуществления изобретения и как показано на фиг. 6. Таким образом, модифицированные воспринятые сигналы Si' умножают на все преобразования Фурье Rix эталонных сигналов (соответствующие корреляциям во времени), и максимумы корреляции сравнивают друг с другом. Место второго воздействия на контактную пластину 3 соответствует максимальному значению максимумов корреляции. Третий вариант осуществления изобретения Третий вариант осуществления изобретения также относится к способу определения места по меньшей мере двух воздействий F1 и F2 на поверхность, такую как контактная пластина 3, показанная на фиг. 1, с использованием по меньшей мере одного акустического датчика Si, где i=1-n (n - количество акустических датчиков), причем воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним акустическим датчиком, причем каждый акустический датчик обеспечивает воспринятый сигнал si(t), где i=1-n. Как и второй вариант осуществления изобретения, третий вариант осуществления изобретения также обеспечивает улучшенное разрешение таким образом, что в случаях, когда возбуждение реального воздействия и возбуждение заданных эталонных воздействий отличаются,место обоих воздействий на контактную пластину 3 все же может быть определено. Этапы обработки информации в соответствии с третьим вариантом осуществления изобретения показаны на фиг. 14. Этап S1 соответствует такому же этапу из первого и второго вариантов осуществления изобретения. В отличие от первого и второго вариантов осуществления изобретения, оперирующих с корреляциями воспринятых сигналов с эталонными сигналами, третий вариант осуществления изобретения строится на корреляциях пар воспринятых сигналов (SiSi') и пар эталонных сигналов (RixRi'x). Начиная с уравнения (2), двойная корреляция для акустических датчиков Si и Si' имеет следующую форму (первые пары корреляции): и для эталонных сигналов, для акустических датчиков Rim и Ri'm для эталонного воздействия, выполненного в точке Rm, как показано на фиг. 1, получают следующий результат корреляции (вторые пары корреляции): Таким образом, этапы S220 и S221 заключаются в определении корреляционных пар, как показано в уравнениях (17) и (18). Далее, этап S2022 заключается в проведении корреляции первого и второго результатов корреляции для получения третьего результата корреляции, а именно SiSi' RimRi'm. При допущении, что два воздействия F1 и F2 произошли в местах эталонных воздействий, а именно в точках Rx и Ry, результат корреляции SiSi' может быть записан следующим образом: Когда модуль EyEx, первый член в сумме является преобладающим, а второй член является наименьшим, так как Ex2ExEyEy2. В этом случае фаза сигналов второго воздействия, которая несет самую важную информацию для установления места воздействий, тонет в фоновых шумах самого сильного воздействия. Однако в этом случае третий и четвертый члены также несут информацию не только о первом, но также и о втором воздействии.- 11016092 Далее, принимая, что самое сильное воздействие имеет место в точке Rx, как и в предыдущих вариантах осуществления изобретения, проводят корреляцию SiSi' с корреляцией эталонного воздействия в точке Rx и получают в результате следующее: В отличие от первого варианта, третий вариант осуществления изобретения не ставит цели установления вкладов только первого воздействия, которые в уравнении (20) соответствуют первому, третьему и четвертому членам (все они несут информацию о первом воздействии) с целью исключения этого вклада при окончательном установлении второго члена (путем исключения установленных первого,третьего и четвертого вкладов) для получения таким способом информации о месте второго воздействия. Фактически, в соответствии с третьим вариантом осуществления изобретения установление вкладов третьего и четвертого членов рассматривают с целью их использования для установления места второго воздействия. С этой целью выполняют этап S223, который заключается в осреднении действительной части третьего результата корреляции SiSi'RimRi'm по всем парам пар акустических датчиков и вычитании полученного среднего из третьих результатов корреляции. В дальнейшем полученные результаты обозначены Pii'x. Как видно из уравнения (20), первый его член соответствует автокорреляции, которая, таким образом, является действительным числом. Второй, третий и четвертый члены являются комплексными числами, и оказывается, что благодаря суммированию по всем парам акустических датчиков их вклад существенно уменьшен, что, по существу, основано на том факте, что их действительная часть колеблется около 0. После определения Pii'x для всех пар датчиков способ согласно третьему варианту осуществления изобретения может быть продолжен извлечением из этого значения места второго воздействия (на этапеS3). Этап S324 заключается в умножении Pii'х на сумму RixRim+Ri'xRi'm для всех эталонных воздействийRm и для всех пар датчиков Si и Si'. Следующий этап S325 заключается в выполнении преобразования Фурье над каждым из полученных результатов и суммировании отрицательной временной части с положительной временной частью каждого из преобразований Фурье. Здесь используют преимущество, состоящее в том, что, за исключением членов HxHiy и HixHi'y,третий и четвертый члены уравнения (20) соответствуют комплексно сопряженным членам. При m=у(место второго воздействия) преобразования Фурье двух результирующих результатов имеют противоположные максимумы относительно оси времени. Поэтому один из этих двух результатов должен быть сопряженным для получения правильного результата. Таким образом, выполнением этапов S323 иS325 могут быть установлены третий и четвертый члены уравнения (20). На фиг. 15-18 показаны экспериментальные результаты для двух воздействий с отношением амплитуд 1/10 в экспериментальной конфигурации, как указано выше для первого и второго вариантов осуществления изобретения. На фиг. 15 показаны максимумы корреляции, полученные корреляцией воспринятых сигналов 28 возможных пар датчиков (без учета перестановок и автокорреляций датчиков) и для соответствующих пар эталонных сигналов RimRi'm. С другой стороны, на фиг. 16 показано среднее результатов корреляции, показанных на фиг. 15, где с целью улучшения контраста выполнено осреднение во времени. Как и в первом варианте осуществления изобретения, максимальное значение максимумов корреляции пар датчиков указывает на место х самого сильного воздействия. В данном примере место самого сильного воздействия находится в верхней правой части контактной пластины 3. Фактически, это соответствует этапу S1 альтернативного способа определения места самого сильного воздействия. Отличие от этапа S1 в первом варианте осуществления изобретения состоит в том, что вместо использования корреляции воспринятого сигнала от одного датчика со всеми эталонными сигналами, здесь, в третьем варианте осуществления изобретения, проводят корреляции для пар датчиков с парами эталонных сигналов. Фактически, использование пар улучшает разрешение и устраняет влияние функций возбуждения от двух воздействий. Теперь, после выполнения вышеуказанных этапов S220-S325 предложенного способа над воспринятыми сигналами и с использованием информации о самом сильном воздействии можно получить результаты, показанные на фиг. 17 и 18.- 12016092 На фиг. 17 показаны максимумы результатов корреляции 28 пар датчиков и соответствующих пар эталонных сигналов, основанные на модифицированных сигналах, полученных в конце этапа S325. С другой стороны, на фиг. 18 показано среднее по 28 парам, причем с целью улучшения контраста осреднение снова выполнено во времени. В то время как на фиг. 16 отчетливо показано только одно воздействие в верхней правой части контактной пластины 3, на фиг. 18 показано место второго воздействия ниже места первого воздействия, для отношения амплитуд 1/10. Как и в первом варианте осуществления изобретения, такой же результат может быть получен в широком диапазоне отношений амплитуд, например место второго воздействия может быть определено в диапазоне амплитуд от 1/100 до 1. Важно отметить, что даже при том, что приведено описание первого, второго и третьего вариантов осуществления изобретения на примере двух одновременных воздействий, все варианты осуществления изобретения также могут быть приспособлены для определения больше чем двух одновременных воздействий. Это может быть выполнено выбором модифицированного сигнала Si' каждый раз в качестве начальной точки для определения места следующего более слабого воздействия. Очевидно, что различные этапы способов согласно первому, второму и третьему вариантам осуществления изобретения также можно комбинировать и/или заменять в зависимости от доступной мощности вычислительных средств и необходимого разрешения во времени и пространстве. В частности, этап определения места самого сильного воздействия, начинающийся от воспринятого сигнала, может быть построен на корреляции SiRim или на корреляции пар SiSi'RimRi'm (на этапе S1). Также в случае определения места более слабого воздействия определение соответствующего места может быть построено на корреляции SiRim (как в первом варианте осуществления изобретения) или на корреляции парSiSi'RimRi'm (как в третьем варианте осуществления изобретения). Четвертый вариант осуществления изобретения обладает преимуществами вышеуказанных первого,второго и третьего вариантов осуществления изобретения и, в частности второго и третьего вариантов,где разрешение во времени улучшено в отношении различий в форме возбуждения пользовательского воздействия и эталонных воздействий для установления траектории непрерывного воздействия на поверхность. Таким образом, в этом варианте осуществления изобретения воздействия происходят не одновременно, но траектория в результате скольжения пальца по контактной пластине 3 понимается как последовательные возбуждения с частотой дискретизации от 10 до 100 Гц. При использовании вариантов осуществления изобретения для отслеживания касаний может быть определена последовательность мест на траектории путем рассматривания "более старого" места как более слабого воздействия и "более свежей" точки на траектории как более сильного воздействия. Фактическая траектория, которая является непрерывной кривой, может быть получена с использованием адаптированных фильтров пространственных частот, например фильтра Кальмана. Вышеуказанные варианты осуществления изобретения приведены на примере использования акустических датчиков. Однако эти способы также могут быть применены и к другим видам датчиков, без выхода за пределы объема изобретения. Вышеуказанные способы согласно настоящему изобретению (варианты 1-4) находят свое применение в любых устройствах, нуждающихся в человекомашинном интерфейсе, и обладают тем преимуществом, что места одновременных или квазиодновременных (как в четвертом варианте осуществления изобретения) воздействий могут быть установлены надежным способом, без использования слишком больших вычислительных мощностей. Это достигнуто благодаря тому, что, как только определено место самого сильного воздействия, определяют модифицированный воспринятый сигнал, который использует преимущество свойств свертки воспринятых сигналов и заданных эталонных сигналов. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения мест по меньшей мере двух воздействий F1 и F2, действующих одновременно или последовательно в течение короткого промежутка времени, на поверхность контактной пластины человекомашинного интерфейса с использованием по меньшей мере одного акустического датчика Si,где i=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), где i=1-n (n - количество датчиков), согласно которому:b) по каждому датчику определяют модифицированный воспринятый сигнал si'(t), в котором уменьшен вклад установленного воздействия, так что становится возможным определить место второго воздействия, и который основан на сравнении каждого из воспринятых сигналов si(t) с заданным эталонным сигналом rij(t), соответствующим эталонному воздействию Rj в месте j. 2. Способ по п.1, согласно которому на этапе а) устанавливают место самого сильного воздействия. 3. Способ по п.1 или 2, согласно которому указанное сравнение является корреляцией. 4. Способ по п.1 или 2, согласно которому этап b) содержит этапы, на которых:b1) коррелируют каждый из воспринятых сигналов si(t) с эталонным сигналом rix(t), являющимся эталонным сигналом из множества эталонных сигналов rij(t), соответствующим эталонному воздействию вблизи, в частности максимально близко к месту x самого сильного воздействия, в частности с использованием преобразования Фурье Si воспринятого сигнала si(t) и преобразования Фурье Rix эталонного сигнала rix(t);b2) согласовывают каждый результат корреляции с заданной функцией, в частности комплексной экспоненциальной функцией; иb3) вычитают согласованную функцию из результата корреляции. 5. Способ по п.1 или 2, согласно которому на этапе b):b1) коррелируют каждое из преобразований Фурье Si воспринятых сигналов si(t) с преобразованием Фурье Rix эталонного сигнала rix(t), являющегося эталонным сигналом из множества эталонных сигналов rij(t), который соответствует эталонному воздействию вблизи, в частности максимально близко к месту х самого сильного воздействия, и таким способом получают n результатов корреляцииb2) осредняют результаты корреляции SiRix по n датчикам;b3) определяют фазу среднего n результатов корреляции SiRix;b4) умножают каждый из результатов корреляции SiRix на комплексно сопряженное число фазы среднего для получения таким способом модифицированных результатов корреляции;b5) вычитают действительную часть из модифицированных результатов корреляции иb6) умножают каждую остаточную часть модифицированных результатов корреляции на фазу среднего. 6. Способ по п.4 или 5, согласно которому на этапе b) также умножают результаты, полученные от преобразования Фурье Rix эталонного сигнала rix(t) с целью получения таким способом модифицированного преобразования Фурье Si', соответствующего модифицированному считанному сигналу si'(t). 7. Способ по любому из пп.1-6, также содержащий этап с), на котором устанавливают место следующего более слабого второго воздействия с использованием модифицированных воспринятых сигналов si'(t) или их преобразований Фурье Si', причем на этапе с) проводят корреляции модифицированных воспринятых сигналов si'(t) каждого датчика с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si' и Rij; и осредняют, предпочтительно во времени, результаты корреляции каждого эталонного сигнала rij(t) по указанным датчикам. 8. Способ по любому из пп.1-7, согласно которому этапы a)-c) повторяют с целью установления места следующего более слабого воздействия, причем каждый раз на этапе a) место воздействия, которое было установлено в предыдущем цикле, принимают как место x самого сильного воздействия, а на этапеb) новый модифицированный воспринятый сигнал определяют из определенного модифицированного воспринятого сигнала из предыдущего цикла. 9. Способ определения мест по меньшей мере двух воздействий F1 и F2, действующих одновременно или последовательно в течение короткого промежутка времени, на поверхность контактной пластины человекомашинного интерфейса с использованием по меньшей мере одной пары акустических датчиковSi и Sj, где i=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый датчик обеспечивает воспринятый сигнал si(t), где i=1-n (n - количество датчиков), согласно которому:b) определяют модифицированный сигнал на основании воспринятого сигнала si(t), в котором уменьшен вклад установленного воздействия, так что становится возможным определить место второго- 14016092 воздействия, и который, кроме того, основан на сравнении пар воспринятых сигналов si(t) и si'(t) пар датчиков si и si' и пар соответствующих заданных эталонных сигналов rij(t) и ri'j(t), соответствующих эталонному воздействию Rj. 10. Способ по п.9, согласно которому на этапе а) устанавливают место самого сильного воздействия. 11. Способ по п.9 или 10, согласно которому указанное сравнение является корреляцией. 12. Способ по п.9 или 10, согласно которому на этапе b):b1) коррелируют преобразования Фурье двух воспринятых сигналов si(t) и si'(t) и таким способом получают первый результат корреляции SiSi';b2) коррелируют преобразования Фурье соответствующих эталонных сигналов rix(t) и ri'x(t), которые соответствуют эталонному воздействию вблизи, в частности максимально близко к месту х самого сильного воздействия, и таким способом получают второй результат корреляции RixRi'x;b3) коррелируют первый и второй результаты корреляции с целью получения третьего результата корреляции SiSi'RixRi'x;b4) осредняют действительную часть третьего результата корреляции по всем парам пар датчиков и вычитают это среднее из третьих результатов корреляции с целью получения Pii'x. 13. Способ по любому из пп.9 или 12, согласно которому на этапе с) установления места следующего более слабого второго воздействия умножают Pii'x на сумму RixRim+Ri'xRi'm для всех эталонных воздействий Rm и для всех пар датчиков Si и Si'; выполняют преобразование Фурье над каждым из результатов и суммируют отрицательную временную часть с положительной временной частью каждого преобразования Фурье. 14. Способ по п.13, согласно которому также на этапе с) осредняют, предпочтительно во времени,полученные суммы по всем парам датчиков Si и Si'. 15. Способ по любому из пп.9-14, согласно которому этапы а)-с) повторяют с целью установления места следующего более слабого воздействия, причем каждый раз на этапе а) место воздействия, которое было установлено на этапе с) предыдущего цикла, используют как место х самого сильного воздействия,а на этапе b) новый модифицированный сигнал определяют из определенного модифицированного сигнала из предыдущего цикла. 16. Способ по любому из пп.1-15, согласно которому на этапе а) коррелируют воспринятый сигнал si(t) каждого датчика с каждым эталонным сигналом rij(t), в частности с использованием преобразований Фурье Si и Rij; и осредняют, предпочтительно во времени, результаты корреляции каждого эталонного сигнала rij(t) по указанным датчикам. 17. Способ по любому из пп.1-15, согласно которому на этапе а) коррелируют преобразования Фурье двух воспринятых сигналов si(t) и si'(t) и таким способом получают первый результат корреляции SiSi'; коррелируют преобразования Фурье эталонных сигналов rim(t) и ri'm(t) и таким способом получают вторые результаты корреляции RimRi'm; коррелируют первый и второй результаты корреляции и таким способом получают третий результат корреляции SiSi'RimRi'm и осредняют, предпочтительно во времени, результаты корреляции по парам датчиков Si и Si'. 18. Способ определения траектории непрерывного воздействия на поверхность с использованием способа по любому из пп.1-17. 19. Способ по п.18, согласно которому первое и второе воздействия соответствуют последовательным точкам на траектории. 20. Способ по любому из пп.1-19, согласно которому датчик представляет собой акустический датчик. 21. Компьютерный программный продукт, содержащий по меньшей мере один читаемый компьютером носитель, содержащий выполняемые компьютером команды на выполнение этапов способа по любому из пп.1-20. 22. Устройство для определения места по меньшей мере двух воздействий F1 и F2 на поверхность,содержащее процессор, выполненный с возможностью осуществления способа по любому из пп.1-21; и по меньшей мере один датчик, выполненный с возможностью передачи воспринятого сигнала, который представляет собой результат по меньшей мере двух воздействий, в процессор.
МПК / Метки
МПК: G06F 17/15, H03K 17/96, G06F 3/043
Метки: двух, определения, мере, места, меньшей, способ, воздействий
Код ссылки
<a href="https://eas.patents.su/26-16092-sposob-opredeleniya-mesta-po-menshejj-mere-dvuh-vozdejjstvijj.html" rel="bookmark" title="База патентов Евразийского Союза">Способ определения места по меньшей мере двух воздействий</a>
Реактор и способ осуществления реакции по меньшей мере двух газов в присутствии жидкой фазы
Номер патента: 11397
Опубликовано: 27.02.2009
Авторы: Лемперер Мишель, Стребелль Мишель
МПК: B01F 5/04, B01F 3/04, B01J 12/00...
Метки: осуществления, двух, способ, реактор, фазы, присутствии, газов, реакции, меньшей, мере, жидкой
Формула / Реферат:
1. Реактор (1) для протекания реакции по меньшей мере двух газов в присутствии жидкой фазы, содержащий замкнутую камеру, снабженную устройством (8) наружной циркуляции жидкой фазы и содержащую по меньшей мере один инжектор (4) для впрыскивания газов (9-10) и циркулирующей снаружи жидкой фазы (8), причем инжектор (4) выполнен так, что смешение газов между собой и с циркулирующей снаружи жидкой фазой начинается только на выходе инжектора. 2....
Реактор и способ осуществления реакции, по меньшей мере, двух газов в присутствии жидкой фазы
Номер патента: 14143
Опубликовано: 29.10.2010
Авторы: Лемперер Мишель, Стребелль Мишель
МПК: B01J 12/00, B01F 5/04, B01F 3/04...
Метки: фазы, двух, меньшей, мере, осуществления, газов, жидкой, реакции, присутствии, способ, реактор
Формула / Реферат:
1. Реактор (1) для протекания реакции по меньшей мере двух газов в присутствии жидкой фазы, содержащий замкнутую камеру, снабженную устройством (8) наружной циркуляции жидкой фазы и содержащую по меньшей мере два инжектора (4), каждый из которых впрыскивает газы (9), (10) и циркулирующую снаружи жидкую фазу (8), причем каждый инжектор содержит по меньшей мере три сопла для отдельного впрыскивания циркулирующей снаружи жидкой фазы и газов.2....
Устройство для приёма данных через спутник с использованием по меньшей мере двух поляризаций
Номер патента: 10643
Опубликовано: 30.10.2008
Авторы: Берретта Гуилано, Смит Дейвид Джеральд, Стаффорд Гари Патрик, Дютронк Жак
МПК: H04N 7/20
Метки: устройство, поляризаций, использованием, приёма, данных, меньшей, двух, спутник, мере
Формула / Реферат:
1. Малошумящий блок приемного устройства, предназначенного для приема информационных сигналов, передаваемых с помощью спутника на частотах в пределах заранее заданного диапазона частот, при этом малошумящий блок включает схемы для приема и обработки информационных сигналов, имеющих одновременно по меньшей мере два формата поляризации в заранее заданном диапазоне частот; и схемы для формирования аудиоданных и/или видеоданных из информационных...
Соединительное устройство для, по меньшей мере, двух изолированных проводов.
Номер патента: 587
Опубликовано: 29.12.1999
Автор: Лакруа Жак
МПК: H01R 4/24
Метки: для, устройство, двух, изолированных, мере, соединительное, проводов, меньшей
Формула / Реферат:
1. Соединительное устройство для, по меньшей мере, двух электрических проводов (17), покрытых изолирующей оболочкой (18), содержащее коробку (1), в которой имеется ввод (2) для пропуска концов изолированных проводов, средство (3) для приема концов проводов в коробке, средство (12), вдвигающееся в коробку перпендикулярно изолированным проводам, имеющее, по меньшей мере, два шлица (13) для захвата изоляции и втягивания ее внутрь в направлении дна...
Способ определения расстояний от устройства до, по меньшей мере, первого и второго слоев в формации
Номер патента: 11963
Опубликовано: 30.06.2009
Авторы: Остермейер Ричард Мартин, Баннинг Эрик Ян, Хагивара Терухико
МПК: G01V 3/38
Метки: слоев, второго, мере, до, меньшей, формации, расстояний, устройства, определения, способ, первого
Формула / Реферат:
1. Способ определения, по меньшей мере, первого и второго расстояний от устройства до, по меньшей мере, первого слоя и второго слоя в формации, при этом по меньшей мере один из первого и второго слоев содержит аномалию электромагнитной индукции, устройство содержит излучатель для излучения электромагнитных сигналов через формацию и приемник для обнаружения откликов, способ содержит этапы, при выполнении которых доставляют устройство внутрь...
Предыдущий патент: Огнестойкая полимерная композиция, содержащие ее изделия и ее применение
Следующий патент: Способ превращения нитрильных соединений в карбоновые кислоты и соответствующие эфиры
Случайный патент: Фунгицидная смесь