Устройство для изготовления композитных тел непрерывных листовидных элементов
Формула / Реферат
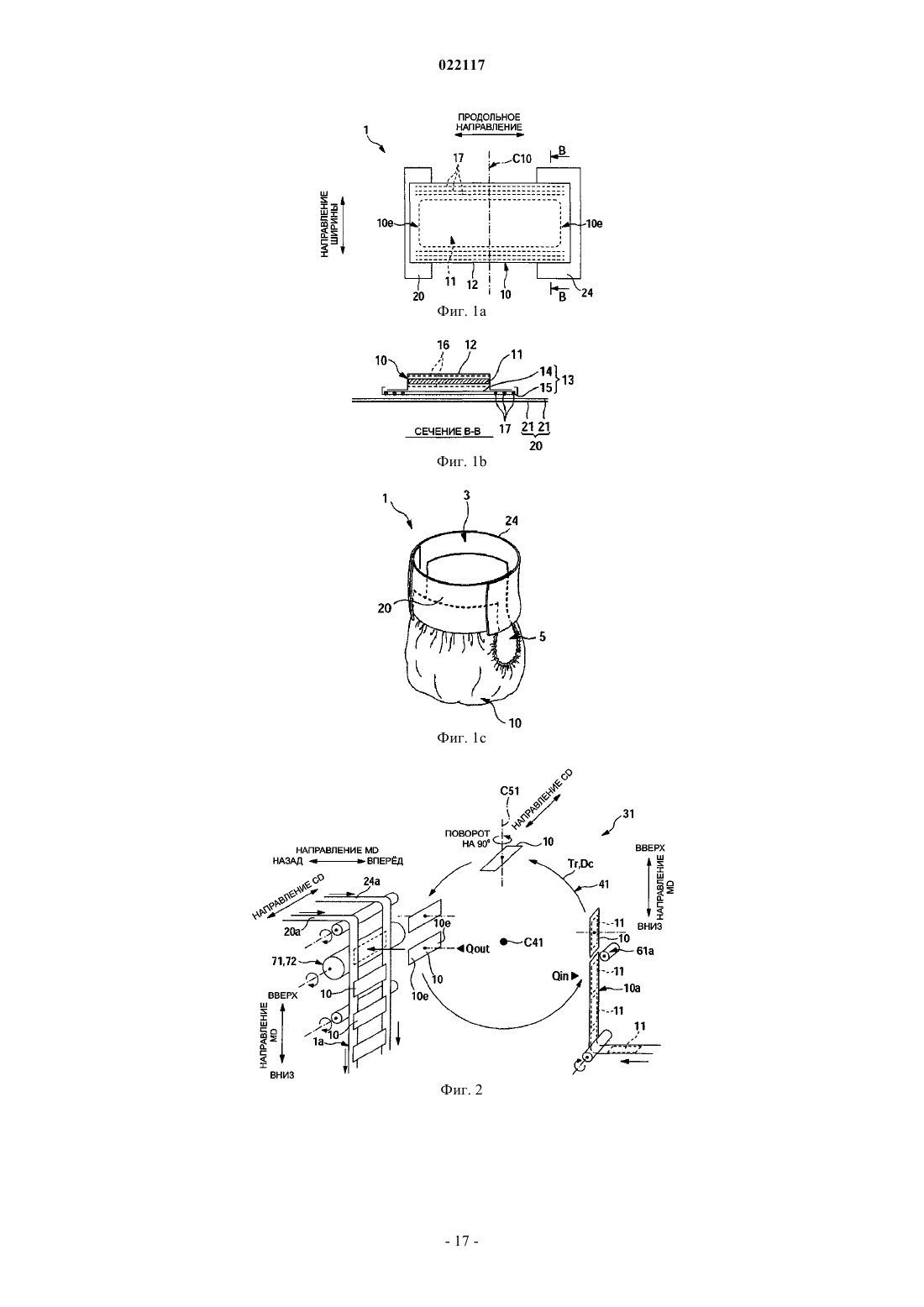
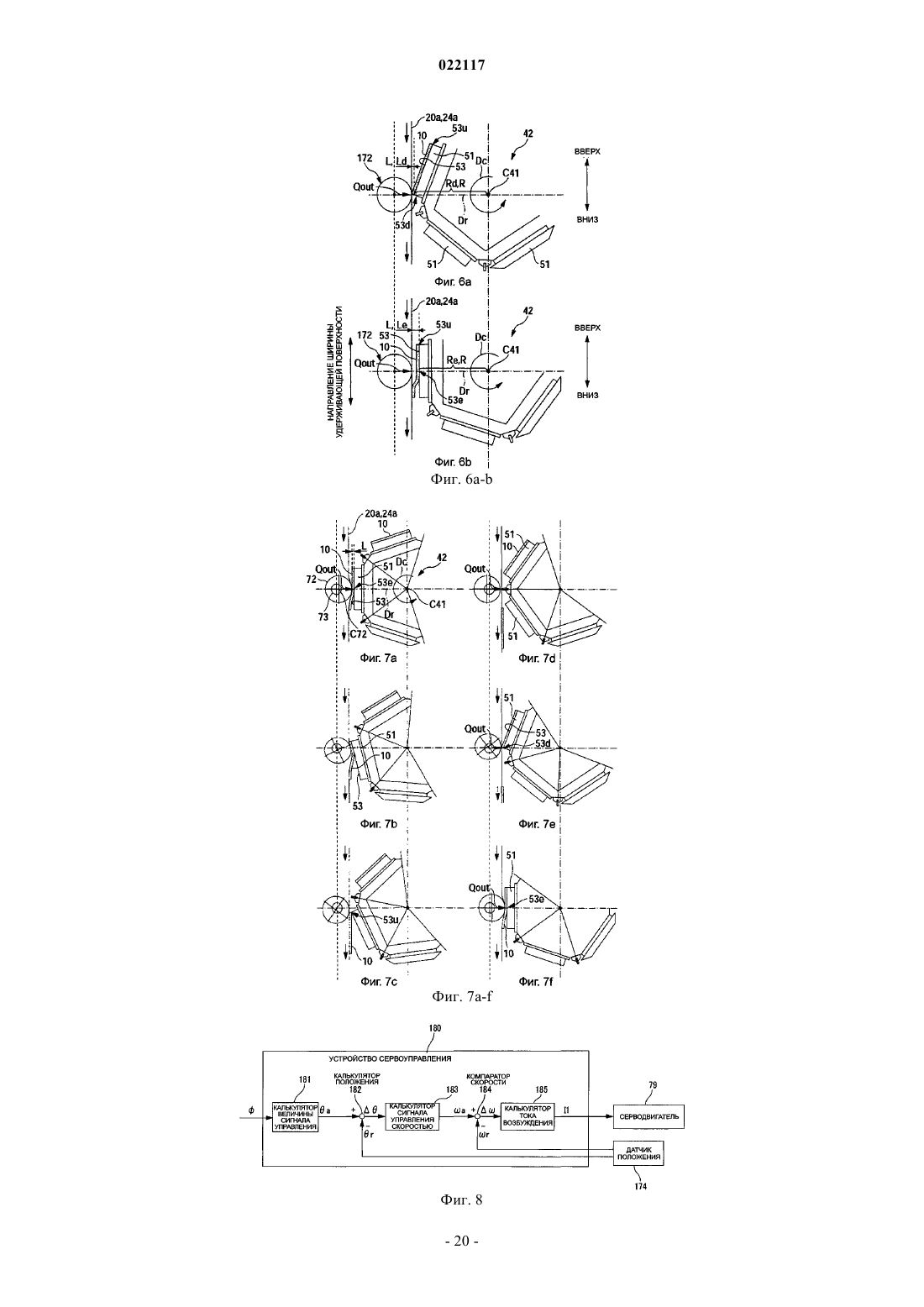
1. Устройство для изготовления составного изделия, содержащего поясные элементы и абсорбирующий элемент, образуемого посредством присоединения удерживаемого абсорбирующего элемента (10), полученного из непрерывного листовидного элемента (10а), к непрерывным листовидным элементам (20а, 24а), образующим поясные элементы (20, 24) изделия в положении передачи абсорбирующего элемента (10), содержащее
вращающийся корпус (42), который выполнен с возможностью вращения вокруг оси (С41) вращения;
удерживающую абсорбирующий элемент часть (51), установленную на вращающемся корпусе (42), с обращенной наружу удерживающей поверхностью (53) в радиальном направлении от оси (С41) корпуса, которая удерживает абсорбирующий элемент (10) в положении передачи абсорбирующего элемента,
механизм (71) передачи абсорбирующего элемента, который позиционирован в положении передачи абсорбирующего элемента и который выполнен с возможностью передачи абсорбирующего элемента от удерживающей поверхности (53) к непрерывному листовидному элементу (20а, 24а), когда удерживающая поверхность проходит положение передачи абсорбирующего элемента, причем
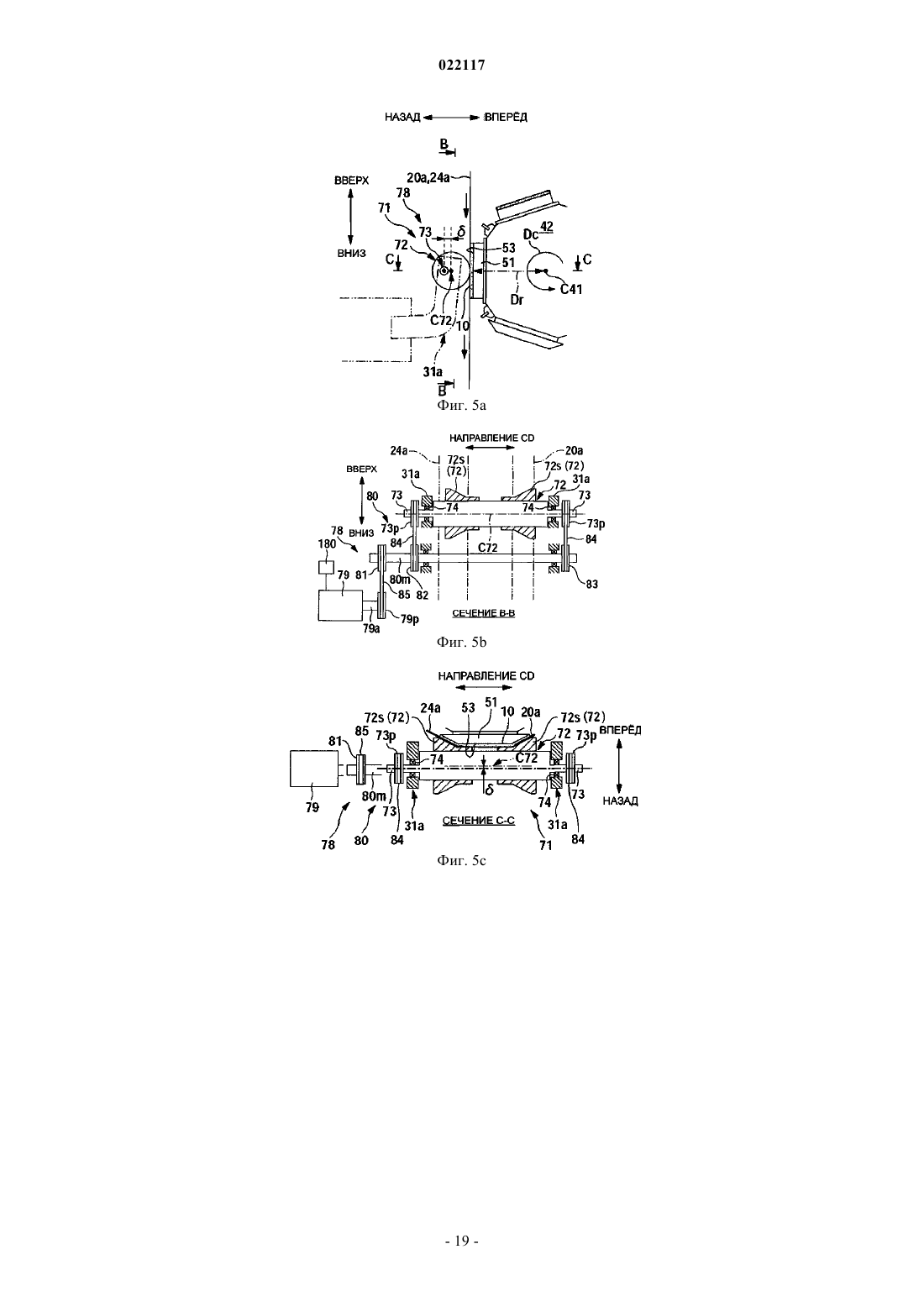
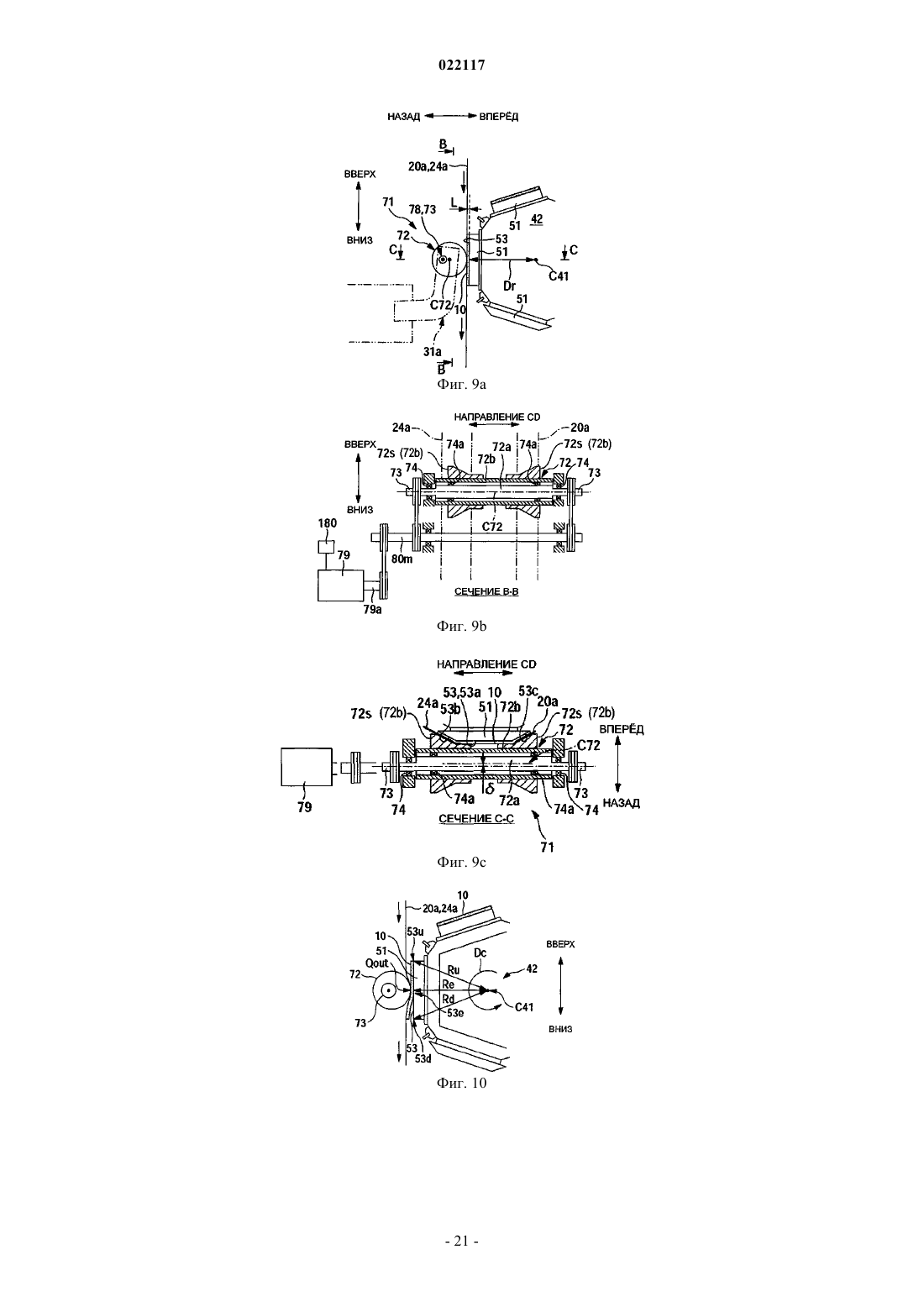
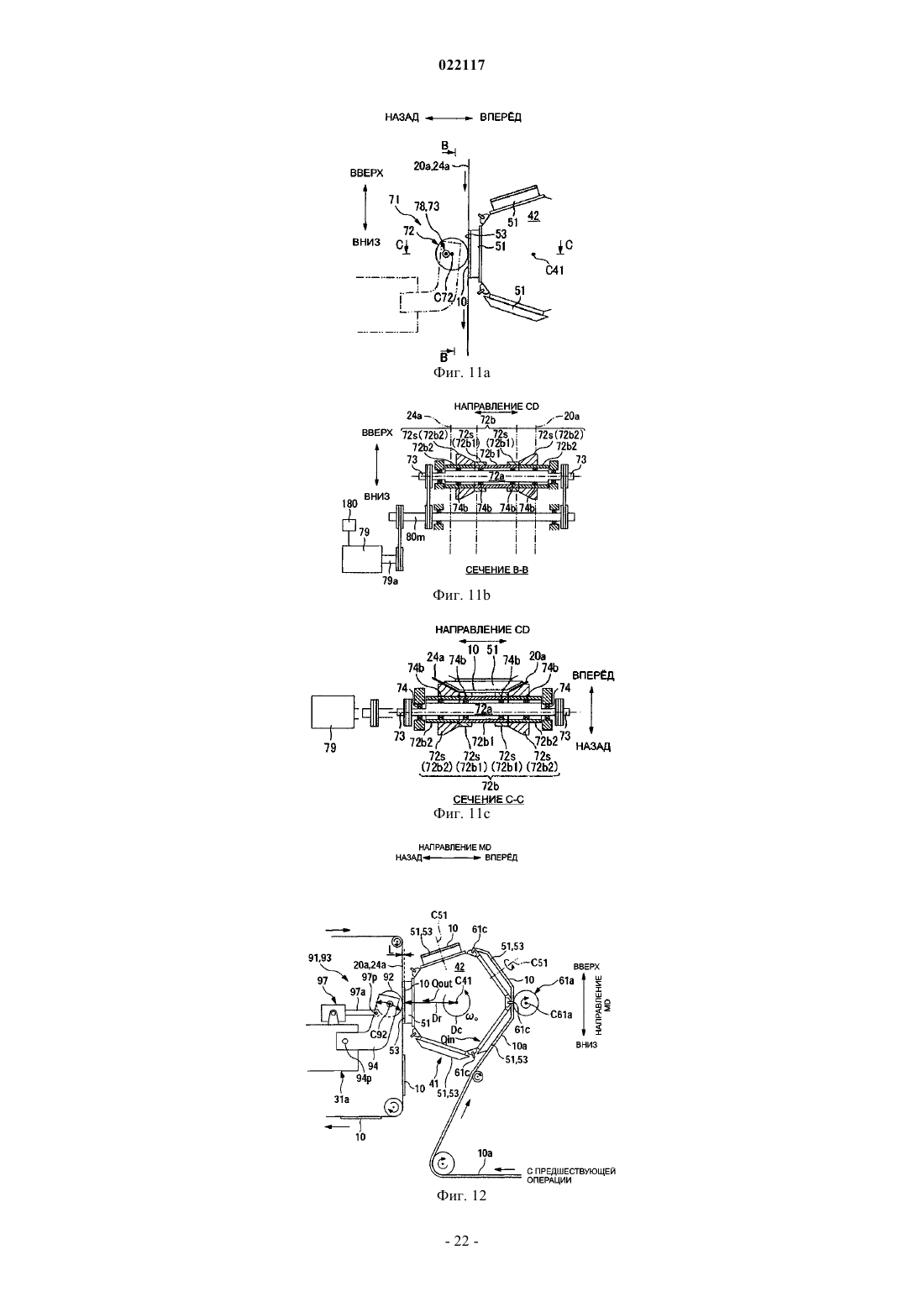
механизм (71) передачи абсорбирующего элемента имеет эксцентрично установленный транспортный ролик (72), который входит в контактное взаимодействие с непрерывными листовидными элементами (20а, 24а) для транспортирования непрерывного листовидного элемента, и нажимной механизм (78), который выполнен с возможностью выдвижения внешней окружной поверхности транспортного ролика (72) в радиальном направлении к оси (С41) барабана (42) для прижима (поджима) непрерывных листовидных элементов (20а, 24а) к абсорбирующему элементу (10), и
нажимной механизм (78) выполнен с возможностью изменения величины, на которую выдвигается внешняя окружная поверхность транспортного ролика (72) во взаимодействии с местоположением удерживающей поверхности (53) в радиальном направлении корпуса в положении передачи абсорбирующего элемента.
2. Устройство по п.1, в котором
нажимной механизм (78) выполнен с возможностью увеличения величины, на которую выдвигается внешняя окружная периферийная поверхность ролика в положении передачи абсорбирующего элемента, когда местоположение удерживающей поверхности движется внутрь в радиальном направлении к оси (С41) вращения, и
нажимной механизм выполнен с возможностью уменьшения величины, на которую выдвигается внешняя окружная периферийная поверхность ролика, когда местоположение удерживающей поверхности движется наружу в радиальном направлении от оси (С41) вращения.
3. Устройство по п.1 или 2, в котором
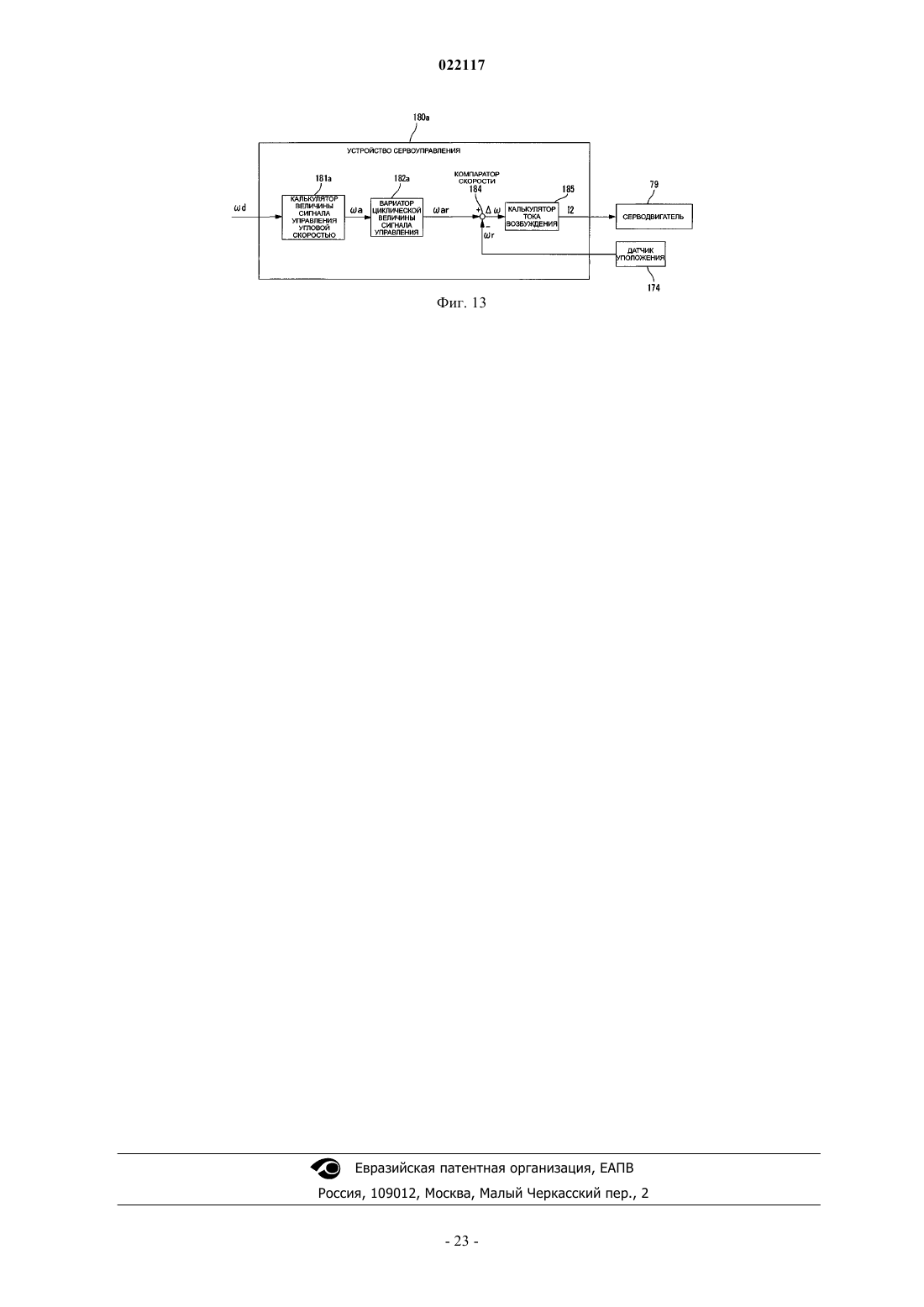
нажимной механизм (78) имеет привод в виде серводвигателя, (79), который выполнен с возможностью перемещения внешней окружной поверхности транспортного ролика в радиальном направлении к оси (С41) вращения и от нее в радиальном направлении, и
контроллер, который управляет приводом.
4. Устройство по п.3, в котором
множество удерживающих абсорбирующий элемент частей (51) установлено с заданным угловым интервалом на внешней периферии вращающегося корпуса,
транспортный ролик (72) установлен на вращающемся эксцентричном валу (73), децентрированный относительно осевого центра ролика и расположенный параллельно вращающемуся валу (С41) вращающегося корпуса (42), а
привод нажимного механизма (78) является (серво)электродвигателем (79), который выполнен с возможностью приведения во вращение транспортного ролика (72) с помощью эксцентричного вала (73) как центра вращения, и (серво)электродвигатель обеспечивает возможность ролику делать один поворот для каждой удерживающей абсорбирующий элемент части (51).
5. Устройство по п.4, в котором
транспортный ролик (72) имеет среднюю внутреннюю часть (72а) и внешнюю окружную часть (72b), расположенную так, чтобы покрывать внешнюю периферию средней внутренней части,
внешняя окружная часть установлена с возможностью вращения посредством подшипниковой опоры (74), расположенной между внешней окружной частью и средней внутренней частью с центром средней внутренней части (72а) в качестве центра (С72) вращения, и
эксцентричный вал (73) предусмотрен в местоположении, децентрированном относительно центра (С72) средней внутренней части (72а), а средняя внутренняя часть приводится во вращение эксцентричным валом в качестве центра вращения.
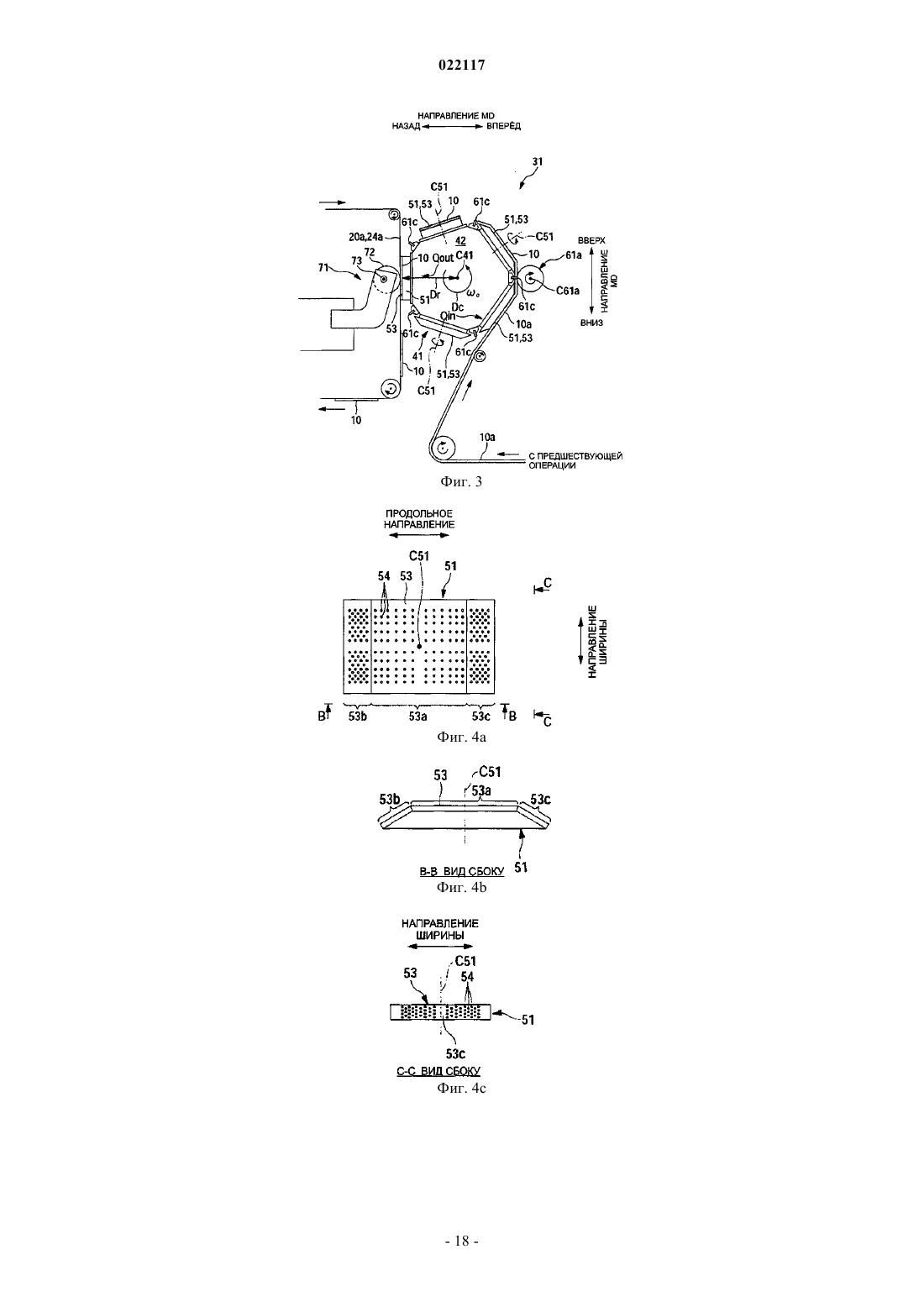
6. Устройство по п.5, в котором
удерживающая поверхность (53) удерживающей абсорбирующей элемент части (51) в положении передачи абсорбирующего элемента имеет форму, где центральная часть в направлении вдоль вращающегося вала, нежели две концевые части, выступает наружу в радиальном направлении от оси вращения, а
форма контура транспортного ролика выполнена в форме барабана, соответствуя форме удерживающей поверхности (53), где центральная часть в направлении вдоль вращающегося вала транспортного ролика является вогнутой, нежели две концевые части.
7. Устройство по п.5 или 6, в котором
внешняя окружная часть конфигурирована с множеством цилиндрических элементов, расположенных в направлении вдоль вращающегося вала транспортного ролика, а
каждый из цилиндрических элементов установлен с возможностью вращения посредством средней внутренней части посредством подшипниковых опор, каждая из которых предусмотрена для соответствующего одного из цилиндрических элементов.
8. Устройство по одному из пп.4-7, в котором
угловая скорость транспортного ролика, приводимого во вращение, изменяется во взаимодействии с местоположением удерживающей поверхности в радиальном направлении корпуса в положении передачи абсорбирующего элемента.
9. Устройство по одному из пп.1-8, в котором
часть поверхностного слоя внешней окружной поверхности транспортного ролика образована эластичным элементом, обладающим гибкостью, чтобы упруго деформироваться.

Текст
УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ КОМПОЗИТНЫХ ТЕЛ НЕПРЕРЫВНЫХ ЛИСТОВИДНЫХ ЭЛЕМЕНТОВ Устройство для изготовления композитного тела непрерывного листовидного элемента посредством присоединения и передачи удерживаемой заготовки к непрерывному листовидному элементу в положении передачи заготовки, включающее в себя вращающийся корпус, который вращается вокруг оси вращения, удерживающую заготовку часть, поддерживаемую вращающимся корпусом в состоянии, где удерживающая поверхность, которая удерживает заготовку, обращена наружу в направлении радиуса вращения вращающегося корпуса, механизм передачи заготовки,который расположен соответственно положению передачи заготовки вдоль направления вращения вращающегося корпуса и который передает заготовку с удерживающей поверхности к непрерывному листовидному элементу, когда удерживающая поверхность проходит положение передачи заготовки, в котором механизм передачи заготовки имеет ролик, который входит в контакт с непрерывным листовидным элементом для транспортирования непрерывного листовидного элемента, и толкающий механизм, который способен выдвинуть внешнюю окружную поверхность ролика внутрь вдоль направления радиуса вращения для прижима непрерывного листовидного элемента к заготовке, и толкающий механизм, который изменяет величину, на которую выдвигается внешняя окружная поверхность вместе с местоположением удерживающей поверхности вдоль направления радиуса вращения в положении передачи заготовки. Область техники, к которой относится изобретение Настоящее изобретение относится к устройству для изготовления композитных тел непрерывных листовидных элементов, используемых для производства абсорбирующих изделий, например подгузников одноразового использования и подобных изделий. Предшествующий уровень техники Обычно, заготовки соединены с непрерывными листовидными элементами вдоль производственных линий для изготовления абсорбирующих изделий, например подгузников одноразового использования. Для выполнения технологического процесса соединения используют аппарат с вращающимся барабаном (см. PLT 1). Перечень ссылок Патентная литератураPLT 1. Японская публикация выложенной патентной заявки 2004-148040. Сущность настоящего изобретения Техническая проблема Как видно на виде сбоку на фиг. 6 а, узел вращающегося барабана имеет вращающийся корпус (барабан) 42, который вращается вокруг оси С 41 вращения. Вращающийся корпус 42 имеет удерживающую поверхность 53, которая удерживает заготовку 10. Удерживающая поверхность 53 предусмотрена на вращающемся корпусе 42 так, что обращена наружу вдоль направления радиуса вращения Dr вращающегося корпуса 42. В направлении Dc, в котором вращающийся корпус 42 совершает поворот, установлены положение Qin приема заготовки (не показано на фиг. 6 а и 6b), где принимается заготовка 10, и положение Qout передачи заготовки, где заготовка 10 передается к непрерывным листовидным элементам 20 а,24 а. Кроме того, ролик 172 позиционирован в положении Qout передачи заготовки, где непрерывные листовидные элементы 20 а, 24 а сделаны так, чтобы входить в контакт с роликом 172 для транспортирования. Поэтому, когда удерживающая поверхность 53 проходит положение Qout передачи заготовки,заготовка 10, удерживаемая посредством удерживающей поверхности 53, соединяется с непрерывными листовидными элементами 20 а, 24 а для передачи от удерживающей поверхности 53 к непрерывным листовидным элементам 20 а, 24 а. При этом, принимая во внимание стабильность и подобные показатели при приеме заготовки 10,эта удерживающая поверхность 53 выполнена, например, с плоской поверхностью в качестве основной поверхности. Однако при передаче заготовки 10 расстояние L между роликом 172 и заготовкой частично изменяется во время передачи вследствие этой плоской поверхности, и таким образом существует возможность того, что состояние соединения может быть нарушено. В частности, как показано на фиг. 6a и 6b, радиусы вращения Rd, Re вокруг оси С 41 вращения на выходной концевой части 53d (или входной концевой части 53u) по ходу движения вдоль вышеупомянутого направления Dc вращения удерживающей поверхности 53 и центральной части 53 е отличаются друг от друга. В такой ситуации, когда выходная концевая часть 53d (или входная концевая часть 53u) проходит положение Qout передачи заготовки, как показано на фиг. 6 а, расстояние Ld между этой концевой частью 53d и внешней окружной периферийной поверхностью ролика 172 будет сильно отличаться от расстояния Le между центральной частью 53 е и внешней окружной периферийной поверхностью ролика 172, когда эта центральная часть проходит положениеQout передачи заготовки, как показано на фиг. 6 В. В результате, когда ролик 172 установлен для соответствующего прижима к выходной концевой части 53d (или входной концевой части 53u), в центральной части образуется 53 е большой зазор, не обеспечивает эффективный прижим, как показано на фиг. 6b. С другой стороны, имеется опасение того, что выходная концевая часть 53d чрезмерно надавливается, когда центральная часть 53 е надавливается должным образом. Следовательно, имеет место вероятность плохого соединения. Следует отметить, что такая проблема не ограничена случаем, когда геометрия поверхности является планарной. Другими словами, такая проблема будет иметь место на одном уровне или другом, когда геометрия поверхности удерживающей поверхности 53 не имеет дугообразной формы с радиусом кривизны с вышеупомянутым радиусом вращения Rd или Re. Настоящее изобретение было сделано ввиду традиционных проблем, например тех, которые были упомянуты выше, и его задачей было улучшение стабильности при соединении и переносе заготовок,удерживаемых посредством удерживающей поверхности, на непрерывный листовидный элемент. Решение проблемы Для решения вышеописанной проблемы главным аспектом настоящего изобретения является устройство для изготовления композитного тела непрерывного листовидного элемента посредством присоединения и передачи удерживаемой заготовки к непрерывному листовидному элементу в положении передачи заготовки, включающее в себя вращающийся корпус, который вращается вокруг оси вращения,удерживающую заготовку часть, поддерживаемую вращающимся корпусом в состоянии, где удерживающая поверхность, которая удерживает заготовку, обращена наружу в направлении радиуса вращения вращающегося корпуса,-1 022117 механизм передачи заготовки, который расположен соответственно положению передачи заготовки вдоль направления вращения вращающегося корпуса и который передает заготовку с удерживающей поверхности к непрерывному листовидному элементу, когда удерживающая поверхность проходит положение передачи заготовки, в котором механизм передачи заготовки имеет ролик, который входит в контакт с непрерывным листовидным элементом для транспортирования непрерывного листовидного элемента, и толкающий механизм, который способен выдвинуть внешнюю окружную поверхности ролика внутрь вдоль направления радиуса вращения для прижима непрерывного листовидного элемента к заготовке, и толкающий механизм, который изменяет величину, на которую выдвигается внешняя окружная поверхность вместе с местоположением удерживающей поверхности вдоль направления радиуса вращения в положении передачи заготовки. Другие признаки настоящего изобретения, чем описаны выше, станут понятными из подробного описания, приведенного ниже, и прилагаемых чертежей. Предпочтительные технические результаты настоящего изобретения В соответствии с настоящим изобретением можно улучшить стабильность при соединении и передаче заготовок, удерживаемых посредством удерживающей поверхности, на непрерывный листовидный элемент. Краткое описание чертежей Фиг. 1 а представляет планарный вид подгузника 1 одноразового использования в развернутом состоянии. Фиг. 1b представляет сечение по линии В-В на фиг. 1 а. Фиг. 1c представляет вид в перспективе подгузника 1. Фиг. 2 представляет схематический вид в перспективе технологического процесса, выполняемого устройством 31 для изготовления композитного тела, соответствующим первому варианту осуществления. Фиг. 3 представляет схематический вид сбоку устройства 31 для изготовления композитного тела. Фиг. 4 а представляет вид спереди (вид с внешней стороны вдоль направления радиуса вращенияDr) удерживающий площадки 51. Фиг. 4b представляет сечение по линии В-В на фиг. 4 а. Фиг. 4c представляет сечение по линии С-С на фиг. 4 а. Фиг. 5a представляет схематический вид сбоку механизма 71 передачи. Фиг. 5b представляет сечение по линии В-В на фиг. 5 а. Фиг. 5c представляет сечение по линии С-С на фиг. 5 а. Фиг. 6a представляет пояснительное схематическое изображение, показывающее причину того, почему транспортный ролик 72 является эксцентрично-вращаемым. Фиг. 6b представляет пояснительное схематическое изображение, показывающее причину того, почему транспортный ролик 72 вращается эксцентрично. Фиг. 7a представляет пояснительное схематическое изображение, показывающее работу эксцентричного вращения. Фиг. 7b представляет пояснительное схематическое изображение, показывающее работу эксцентричного вращения. Фиг. 7c представляет пояснительное схематическое изображение, показывающее работу эксцентричного вращения. Фиг. 7d представляет пояснительное схематическое изображение, показывающее работу эксцентричного вращения. Фиг. 7e представляет пояснительное схематическое изображение, показывающее работу эксцентричного вращения. Фиг. 7f представляет пояснительное схематическое изображение, показывающее работу эксцентричного вращения. Фиг. 8 представляет блок-схему функционирования контроллера 180 серводвигателя. Фиг. 9a представляет схематический вид сбоку предпочтительного аспекта транспортного ролика 72, связанного с механизмом 71 передачи. Фиг. 9b представляет сечение по линии В-В на фиг. 9a. Фиг. 9c представляет сечение по линии С-С на фиг. 9a. Фиг. 10 представляет пояснительное схематическое изображение, показывающее функциональное преимущество вышеупомянутого предпочтительного аспекта. Фиг. 11a представляет схематический вид сбоку предпочтительного аспекта транспортного ролика 72, связанного с механизмом 71 передачи. Фиг. 11b представляет сечение по линии В-В на фиг. 11a. Фиг. 11c представляет сечение по линии С-С на фиг. 11a. Фиг. 12 представляет схематический вид сбоку механизма 91 передачи, соответствующего второму варианту осуществления. Фиг. 13 представляет блок схема контроллера 180 а серводвигателя, соответствующего другому варианту осуществления. Варианты осуществления настоящего изобретения По меньшей мере, следующие предметы изобретения станут очевидными из подробного описания предпочтительных вариантов осуществления, сделанного со ссылкой на сопроводительные чертежи. Устройство для изготовления композитного тела непрерывного листовидного элемента посредством присоединения и передачи удерживаемой заготовки к непрерывному листовидному элементу в положении передачи заготовки, соответствующее настоящему изобретению, включает в себя вращающийся корпус, который вращается вокруг оси вращения; удерживающую заготовку часть, поддерживаемую вращающимся корпусом в состоянии, где удерживающая поверхность, которая удерживает заготовку, обращена наружу в направлении радиуса вращения вращающегося корпуса; механизм передачи заготовки, который расположен соответственно положению передачи заготовки вдоль направления вращения вращающегося корпуса и который передает заготовку с удерживающей поверхности к непрерывному листовидному элементу, когда удерживающая поверхность проходит положение передачи заготовки, в котором механизм передачи заготовки имеет ролик, который входит в контакт с непрерывным листовидным элементом для транспортирования непрерывного листовидного элемента, и толкающий механизм, который способен выдвинуть внешнюю окружную поверхности ролика внутрь вдоль направления радиуса вращения для прижима непрерывного листовидного элемента к заготовке, и толкающий механизм, который изменяет величину, на которую выдвигается внешняя окружная поверхность вместе с местоположением удерживающей поверхности вдоль направления радиуса вращения в положении передачи заготовки. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов величина, на которую выдвигается внешняя окружная периферийная поверхность ролика, изменяется вместе с местоположением удерживающей поверхности вдоль направления радиуса вращения. Поэтому изменение расстояния между внешней окружной периферийной поверхностью ролика и удерживающей поверхностью может ограничиваться вдоль приблизительно всей длины удерживающей поверхности в направлении вращения. Посредством этого может эффективно ограничиваться изменение в состоянии, в котором непрерывный листовидный элемент прижимается к заготовке, когда удерживающая поверхность проходит положение передачи. Как результат, заготовка может быть стабильно присоединена и передана к непрерывному листовидному элементу. Предпочтительно, чтобы в устройстве для изготовления композитного тела непрерывного листовидного элемента толкающий механизм увеличивал величину, на которую внешняя окружная периферийная поверхность ролика выдвигается в положении передачи заготовки, когда местоположение удерживающей поверхности перемещается внутрь вдоль направления радиуса вращения, а толкающий механизм уменьшал величину, на которую выдвигается внешняя окружная периферийная поверхность ролика, когда местоположение удерживающей поверхности перемещается наружу вдоль направления радиуса вращения. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов может эффективно ограничиваться изменение расстояния между удерживающей поверхностью и внешней окружной периферийной поверхностью ролика, которое может вызвано вследствие перемещения положения удерживающей поверхности в направлении радиуса вращения и от направления радиуса вращения, когда удерживающая поверхность проходит положение передачи заготовки. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовидных элементов толкающий механизм имел привод, который перемещает местоположение внешней окружной поверхности ролика внутрь и наружу вдоль направления радиуса вращения, и контроллер, который управляет приводом. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов местоположение внешней окружной поверхности ролика вдоль направления радиуса вращения регулируется посредством контроллера. Другими словами, величина, на которую внешняя окружная периферийная поверхность ролика выдвигается, активно регулируется. Поэтому гибкость регулировки местоположения вышеупомянутой внешней периферии является наилучшей, а регулирование оптимального местоположения является простым. Как результат, может надежно ограничиваться изменение расстояния между удерживающей поверхностью и внешней окружной периферийной поверхностью ролика,которое может вызываться, когда удерживающая поверхность проходит положение передачи заготовки. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовидных элементов было обеспечено множество удерживающих заготовку частей с заданным угловым интервалом вдоль направления вращения вращающегося корпуса, вращающийся вал ролика был параллельным вращающемуся валу вращающегося корпуса, ролик имел в качестве вращающегося вала эксцентричный вал с центром, смещенным относительно центра оси ролика, а приводом толкающего механизма являлся электродвигатель, который приводит во вращение ролик с помощью эксцентричного вала как центра вращения, и электродвигатель дает возможность ролику делать один поворот для каждой удерживающей заготовку части. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов вышеупомянутая проблема может быть решена с помощью простой конфигурации эксцентричного вала, выполненного для ролика и электродвигателя, приводящего ролик для вращения этим эксцентричным валом, в качестве центра вращения. Другими словами, может быть эффективно ограничено изменение расстояния между удерживающей поверхностью и внешней окружной периферийной поверхностью ролика, которое может возникать, когда удерживающая поверхность проходит положение передачи заготовки. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовидных элементов ролик имел среднюю внутреннюю часть и внешнюю окружную часть, расположенную так, чтобы покрывать внешнюю периферию средней внутренней части, внешняя окружная часть была установлена с возможностью вращения посредством подшипникового (опорного) узла, расположенного между внешней окружной частью и средней внутренней частью с центром средней внутренней части в качестве центра вращения, и эксцентричный вал был предусмотрен в местоположении с центром, смещенным относительно центра средней внутренней части, а средняя внутренняя часть приводилась во вращение эксцентричным валом в качестве центра вращения. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов ролик, приводимый во вращение вокруг эксцентричного вала в центральной части ролика,изменяющей величину, на которую выдвигается внешняя окружная поверхность ролика, дает возможность надежного ограничения изменения расстояния между удерживающей поверхностью и роликом,которое может возникать, когда удерживающая поверхность проходит положение передачи заготовки. Кроме того, внешняя окружная часть ролика может свободно и относительно поворачиваться по отношению его центральной части. Поэтому, когда внешняя периферийная поверхность ролика перемещается относительно удерживающей поверхности с разностью в относительных скоростях, это различие в относительной скорости компенсируется относительным вращением внешней окружной части этого ролика относительно центральной части. Как результат, может эффективно ограничиваться плохое соединение, например складки, получаемые на заготовках и непрерывных листовидных элементах вследствие различия в относительной скорости. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовидных элементов удерживающая поверхность удерживающей заготовку части в положении передачи заготовки имела форму, где центральная часть в направлении вдоль вращающегося вала, нежели две концевые части, выступает наружу вдоль направления радиуса вращения, а форма контура ролика находится в пределах геометрии (контура) барабана, соответствуя форме удерживающей поверхности, где центральная часть в направлении вдоль вращающегося вала ролика является вогнутой, нежели две концевые части. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов контур ролика, образуемый в форме, соответствующей форме удерживающей поверхности,обеспечивает возможность прижима непрерывных листовидных элементов плотно к заготовке вдоль приблизительно всей длины удерживающей поверхности в направлении вдоль вращающегося вала. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовидных элементов внешняя окружная часть была выполнена с множеством цилиндрических элементов, расположенных в направлении вдоль вращающегося вала, а каждый из цилиндрических элементов установлен с возможностью вращения посредством средней внутренней части через посредство подшипниковых(опорных) узлов, каждый из которых предусмотрен для соответствующего одного из цилиндрических элементов. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов, даже если различие в относительной скорости между удерживающей поверхностью и каждым местоположением внешней окружной периферийной поверхности ролика изменяется вдоль направления вращающегося вала, то, поскольку цилиндрические элементы, соответствующие каждому местоположению, соответственно вращаются независимо относительно центральной части, может эффективно ограничиваться плохое соединение вследствие различия в относительной скорости. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовидных элементов угловая скорость ролика, приводимого во вращение, изменялась вместе с местоположением удерживающей поверхности вдоль направления радиуса вращения в положении передачи заготовки. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов угловая скорость ролика, приводимого во вращение, изменяется вместе с местоположением удерживающей поверхности вдоль направления вращения, таким образом, может уменьшаться различие в относительной скорости между внешней окружной поверхностью ролика и удерживающей поверхностью. Предпочтительно, чтобы в устройстве для изготовления композитных тел непрерывных листовид-4 022117 ных элементов часть поверхностного слоя внешней окружной поверхности ролика была образована с помощью эластичного элемента, обладающего гибкостью, чтобы упруго деформироваться. В соответствии с таким устройством для изготовления композитных тел непрерывных листовидных элементов, даже если имеется различие в относительной скорости между внешней окружной поверхностью ролика и удерживающей поверхностью, то это различие в относительной скорости может компенсироваться посредством упругой деформации части поверхностного слоя ролика. Как результат, может эффективно ограничиваться плохое соединение, например, в результате морщин (складок), получаемых на заготовках и непрерывных листовидных элементах вследствие различия в относительной скорости. Первый вариант осуществления настоящего изобретения Устройство 31 для изготовления композитных тел 1 а непрерывных листовидных элементов, соответствующее первому варианту осуществления изобретения, используют, например, в производственной линии для изготовления подгузников 1 одноразового использования. На фиг. 1a-1c приведены пояснительные схематические изображения подгузников одноразового использования. На фиг. 1a приведено планарное изображение подгузника 1 одноразового использования в развернутом состоянии, на фиг. 1b приведено сечение по линии В-В на фиг. 1a, а на фиг. 1c приведен вид в перспективе подгузника 1. Этот подгузник 1 включает в себя переднюю поясную часть 20, которая покрывает переднюю(брюшную) сторону пользователя, заднюю поясную часть 24, которая покрывает заднюю сторону пользователя, и основное абсорбирующее тело 10 которое установлено напротив промежности (пользователя) во время ношения (подгузника) и которое поглощает жидкие экссудаты тела пользователя, например мочу. В развернутом состоянии, показанном на фиг. 1 а, с передней поясной частью 20 и задней поясной частью 24, разнесенными и выровненными параллельно друг другу, две концевые части 10 а, 10 е (фиг. 2) в продольном направлении основного абсорбирующего тела 10 расположены между ними и прикреплены к ним, и конфигурация внешнего вида подгузника в планарном состоянии приблизительно имеет форму буквы Н. И из этого состояния, при складывании основного абсорбирующего тела 10 пополам по серединеC10 в продольном направлении основного абсорбирующего тела 10 и поясных частей 20, 24, противолежащих друг другу в сложенном пополам состоянии, закрепляемых на участках, которые контактируют в сторону живота пользователя, соединяет эти поясные части 20, 24 в кольцевую конфигурацию. В этом случае, как показано на фиг. 1c, образуется подгузник 1 в состоянии ношения с отверстием 3 для охвата тела пользователя и парой отверстий 5, 5 для охвата ног пользователя. Следует отметить, что подгузник типа трусов образуется, когда для вышеописанной крепежной структуры используют неразъемную конструкцию, например сварку и подобное соединение, в то время как развертываемый подгузник образуют, когда используют разъемную соединительную структуру, например крепежный ленточный элемент (не показан) и подобные элементы. Ниже, со ссылкой на фиг. 1a и 1b будет приведено описание компонентов 10, 20, 24 подгузника 1. Основное абсорбирующее тело 10 включает в себя абсорбирующее тело 11 абсорбирующего жидкость волокна, например, волокнистой массы, из которой формуют приблизительно прямоугольную конфигурацию, понятную на планарном виде, верхний листовой элемент 12, который покрывает абсорбирующее тело 11 со стороны, обращенной к коже пользователя, и тыльный листовой элемент 13, который покрывает абсорбирующее тело 11 со стороны, не обращенной к коже пользователя, и также служащий в качестве наружного покрова (внешней оболочки) подгузника 1. Абсорбирующее тело 11 может включать в себя сверхабсорбирующий полимер. Верхний листовой элемент 12 является, например, проницаемым для жидкости нетканым материалом, планарный размер которого больше абсорбирующего тела 11. Кроме того, тыльной листовой элемент 13 является непроницаемым для жидкости листом, планарный размер которого больше, чем абсорбирующее тело 11, и, например, может быть использован тыльный листовой элемент 13 двухслойной структуры с непроницаемым для жидкости герметизированным листом 14, например полиэтилена, и наружного покровного листа 15, например нетканого материала, соединенных вместе. Тыльный листовой элемент 13 и верхний листовой элемент 12 соединены в виде похожей на каркас конфигурации, образуя прослаивание абсорбирующего тела 11 между ними, в части,обращенной наружу с четырех сторон абсорбирующего тела 11, образуя в соответствии с этим основное абсорбирующее тело 10. Следует отметить, что, как показано на фиг. 1b, проницаемый для жидкости лист 16, например тонкой (папиросной) бумаги, может быть расположен между верхним листовым элементом 12 и абсорбирующим телом 11 или между тыльным листовым элементом 13 и абсорбирующим телом 11. Кроме того,упругие элементы 17, например упругие нити, могут быть размещены между и зафиксированы в вытянутом (растянутом) состоянии вдоль продольного направления между герметизированным листом 14 и наружным покровным листом 15 на обеих концевых частях в направлении ширины тыльного листового элемента 13. В этом случае придается эластичность (упругость) частям вокруг отверстий 5, 5, предназначенных для охвата ног пользователя подгузника 1, для образования участка (манжеты) со сборками вокруг ног вместе с этими упругими элементами 17. Передняя поясная часть 20 и задняя поясная часть 24 обе выполнены, например, с элементами из мягких листов, например нетканого материала. Как показано на фиг. 1b, поясные части 20 и 24 выполнены с двумя перекрывающимися листами нетканого материала 21, 21 и поясные части 20 и 24 соответственно соединены для прикрепления к соответствующим концевым частям 10 е, 10 е вдоль продольного направления основного абсорбирующего тела 10. Кроме того, упругий элемент, например резиновая нить, может быть прикреплен в вытянутом состоянии к каждой из поясных частей 20 и 24 для придания эластичности этим поясным частям 20 и 24. Такой подгузник 1 комплектуют, используя любой из вышеупомянутых компонентов в качестве базового материала, который непрерывно движется вдоль производственной линии, и присоединяя различные компоненты к этому базовому материалу. Устройство 31 для изготовления композитных тел, соответствующее первому варианту осуществления изобретения, выполняет один из этих технологических процессов. На фиг. 2 представлен схематический вид в перспективе технологического процесса, выполняемого посредством этого устройства 31 для изготовления композитных тел. Следует отметить, что в нижеследующем описании направление ширины устройства 31 для изготовления композитных тел называется также направлением CD, а направление, ортогональное этому направлению CD, называется также направлением MD. Другими словами, направление MD относится к любому направлению в плоскости, ортогональной направлению CD. В некоторых случаях два направления, ортогональных друг другу в направлении MD, могут быть соответственно названы направлением вверх-вниз и направлением вперед-назад. В этом технологическом процессе выполняется операция по размещению основного абсорбирующего тела 10 между парой поясных частей 20 и 24 для соединения с ним, и посредством этого полуфабрикат 1 а подгузника 1 получают приблизительно Н-образной форме, как показано на фиг. 1a. В частности, как показано на фиг. 2, пара поясных частей 20 и 24 в месте подачи к устройству 31 для изготовления композитных тел находится в форме непрерывных тел 20 а, 24 а поясных элементов в направлении MD и в то же время транспортируемых рядом в направлении CD с промежутком между ними. Основное абсорбирующее тело 10 также непрерывно транспортируется в виде непрерывного тела 10 а, идущего в направлении MD. Другими словами, верхний листовой элемент 12 и тыльный листовой элемент 13, которые содержат основное абсорбирующее тело 10, находятся в виде непрерывных листов,идущих в продольном направлении основного абсорбирующего тела 10. Верхний листовой элемент 12 и тыльный листовой элемент 13 имеют расположенное между ними абсорбирующее тело 11, в то время как абсорбирующие тела 11, 11,расположены прерывисто (с интервалом) в вышеупомянутом продольном направлении. В то же время устройство 31 для изготовления композитного тела имеет вращающийся барабан 41,который приводится во вращение вокруг оси С 41 вращения в направлении CD. Сначала, в положенииQin приема, установленном в заданном положении в направлении Dc его вращения, непрерывное тело основного абсорбирующего тела 10 а принимается внешней окружной поверхностью вращающегося барабана 41 и захватывается этой внешней окружной поверхностью для удержания. В этом случае ножевой ролик 61 а располагается в заданном месте в направлении Dc вращения вращающегося барабана 41. Дополнительно, приемные средства 61 с, 61 с,установлены с заданными интервалами на внешней периферии вращающегося барабана 41 (см. фиг. 3) для приема режущих пластин(не показаны) ножевого ролика 61 а. Места, где установлены приемные средства 61 с, являются местоположениями частей между абсорбирующими телами 11, 11, связанными с непрерывным телом основного абсорбирующего тела 10 а, удерживаемыми посредством вращающегося барабана 41. Таким образом, когда приемные средства 61 с на вращающемся барабане 41 проходят местоположения, где размещен ножевой ролик 61 а, непрерывное тело основного абсорбирующего тела 10 а делится вдоль направления CD на части между абсорбирующими телами 11, 11, создавая в соответствии с этим основное абсорбирующее тело 10, продольное направление которого совпадает с направлением MD. Как показано на фиг. 2, вращающийся барабан 41, в то время как его внешняя окружная поверхность удерживает вышеупомянутое основное абсорбирующее тело 10, перемещает основное абсорбирующее тело 10 к заданному положению Qout передачи посредством приведения во вращение вращающего барабана 41. Следует отметить, что этот процесс перемещения основного абсорбирующего тела 10 к положениюQout передачи (соответствующему положению передачи заготовки) включает в себя операцию поворота основного абсорбирующего тела 10 на 90 вокруг центра его поверхности, изменяя в соответствии с этим продольное направление основного абсорбирующего тела 10 от направления MD к направлению CD. При этом механизм передачи 71 позиционирован в этом положении Qout передачи. Механизм 71 передачи имеет транспортный ролик 72. Пара непрерывных тел 20 а и 24 а поясных элементов выполняются рядом в направлении CD для вхождения в контакт и этим транспортным роликом 72, и эти непрерывные тела 20 а и 24 а поясных элементов непрерывно транспортируются в направлении MD. Таким образом, когда основное абсорбирующее тело 10 проходит вышеупомянутое положение Qout передачи,благодаря приведению во вращение вращающегося барабана 41, пара непрерывных тел 20 а и 24 а пояс-6 022117 ных элементов соединяются с двумя концевыми частями 10 е, 10 е в продольном направлении основного абсорбирующего тела 10, создавая в соответствии с этим полуфабрикат 1 а, имеющий приблизительно форму лестницы, показанную на фиг. 2, являющуюся предшественницей приблизительной Н-образной формы, показанной на вышеупомянутой фиг. 1a. Эти процессы до сих пор являются процессами, которые выполняются посредством устройства 31 для изготовления композитных тел. Между прочим, в этом примере, основное абсорбирующее тело 10 соответствует заготовке, пара непрерывных тел 20 а и 24 а поясных элементов соответствует непрерывному листовидному элементу, а полуфабрикат 1 а, приблизительно имеющий форму лестницы, соответствует композитному телу непрерывного листовидного элемента. Ниже приведено описание компонентов 61 а, 41, 71 этого устройства 31 для изготовления композитного тела. Ножевой ролик 61 а Как показано на фиг. 3, ножевой ролик 61 а приводится во вращение вокруг центральной оси С 61 а в направлении, проходящем вдоль направления CD (направления, ортогонального плоскости листа чертежа). Планарные режущие пластины (не показаны) предусмотрены в направлении CD на внешней окружной поверхности ножевого ролика 61 а. Дополнительно, как упоминалось выше, приемные средства 61 с,которые принимают эти режущие пластины, предусмотрены между двумя описываемыми позднее удерживающими площадками 51, 51 на внешней окружной поверхности вращающегося барабана 41. В этом случае, когда приемные средства 61 с на вращающемся барабане 41 проходят местоположение, где расположен ножевой ролик 61 а, ножевой ролик 61 а, приводимый во вращение, заставляет режущие пластины входить в непрерывное тело основного абсорбирующего тела 10 и в то же время находится против приемных средств 61 с, разделяя в соответствии с этим непрерывное тело основного абсорбирующего тела 10 а в местоположении границы между удерживающими площадками 51, 51 для создания основных абсорбирующих тел 10. Вращающийся барабан 41 Вращающийся барабан 41 включает в себя основной корпус 42 вращающегося барабана (соответствующий вращающемуся корпусу), который приводится во вращение вокруг оси С 41 вращения в направлении CD, и множество (пять в примере, показанном на этом чертеже) удерживающих площадок 51, 51(соответствующих части, удерживающей заготовку) для удерживания основного абсорбирующего тела 10, поддерживаемых рядом вдоль направления Dc вращения с интервалами под заданным углом на внешней окружной поверхности основного корпуса вращающегося барабана 42. Основной корпус вращающегося барабана 42 является, например, цилиндрическим элементом,форма поперечного сечения которого в продольном направлении (направлении MD) представляет собой приблизительно правильный пятиугольник. Соответствующий привод, например электродвигатель и т.п.,используют для приведения основного корпуса вращающегося барабана 42 во вращение, например, с заданной угловой скоростью 0 в направлении против направления вращения часовой стрелки, как направление вращения Dc. В соответствии с этим удерживающие площадки 51, 51,движутся со скоростью перемещения при вышеупомянутой угловой скорости 0 вдоль траектории Tr (см. фиг. 2) правильного круга с вышеупомянутой осью С 41 вращения в качестве центра. Вышеупомянутое положение Qin приема и положение Qout передачи установлены вдоль этой траектории Tr, как показано на фиг. 3. Поэтому удерживающая площадка 51 принимает непрерывное тело основного абсорбирующего тела 10 а, транспортируемое с предыдущей операции (обработки) в положение Qin приема, и соединяет основное абсорбирующее тело 10 на удерживающей площадке 51 с парой непрерывных тел 20 а и 24 а поясных элементов для передачи к механизму 71 передачи, взаимодействующему с транспортным роликом 72 в положении Qout передачи. При этом, само собой разумеется, что на часть, подвергаемую этому соединению, предварительно нанесн адгезив. На фиг. 4a приведен вид спереди (вид с внешней стороны вдоль направления радиуса вращения Dr) удерживающей площадки 51, а на фиг. 4b и 4c приведены сечения по линии В-В и по линии С-С, показанные на фиг. 4a соответственно. Удерживающая площадка 51 имеет приблизительно прямоугольную плоскую форму, имеющую удерживающую поверхность 53, которая удерживает основное абсорбирующее тело 10 в состоянии, где поверхности приходят в контакт. Удерживающая поверхность 53 обращена к внешней стороне в направлении радиуса вращения Dr основного тела вращающегося корпуса 42, как показано на фиг. 3. Как показано на фиг. 4a, удерживающая поверхность 53 имеет множество воздухозаборных отверстий 54, 54 , образованных вдоль всей ее поверхности, и эти воздухозаборные отверстия 54, 54 соединены с источником (не показан) отрицательного давления через воздухозаборную камеру или соответствующий канал и т.п. (не показано) внутри удерживающей площадки 51. Таким образом, в этой удерживающей поверхности 53 генерируется всасывающая сила для удерживания основного абсорбирующего тела 10 в результате всасывания воздуха через воздухозаборные отверстия 54, 54,Эта операция всасывания воздуха выполняется вдоль области между положением Qin приема и положениемQout передачи, показанных на фиг. 3, и, обычно, не выполняется в областях кроме этой (то есть возвратной области между положением Qout передачи и положением Qin прима). Как показано на фиг. 4a-4c, ось вращения С 51 установлена для вращения удерживающих площадок 51, и эта ось вращения С 51 проходит через центр плоскости удерживающей поверхности 53 в направлении, проходящем вдоль направления радиуса вращения Dr вращающегося корпуса 42. Удерживающие площадки 51 могут вращаться (поворачиваться) вокруг оси вращения С 51 посредством соответствующего привода (не показан), например электродвигателя. Поэтому, как показано на фиг. 3, удерживающие площадки 51 поворачиваются на 90 вокруг оси вращения С 51 после прохождения местоположения, где расположен ножевой ролик 61 а, в соответствии с этим последовательно изменяя продольное направление основного абсорбирующего тела 10 от направления MD к направлению CD. После передачи основного абсорбирующего тела 10 в положении Qout передачи удерживающие площадки 51 поворачиваются на 90 для приема непрерывного тела основного абсорбирующего тела 10 в положении Qin приема. В этом случае продольное направление удерживающей площадки 51 возвращается из направления CD в направление MD. Следует отметить, что, как показано на фиг. 4a, удерживающая поверхность 53 также имеет продольное направление и направление ширины, из которых продольное направление находится в линии с продольным направлением удерживающей площадки 51. Дополнительно, как показано на фиг. 4b, удерживающая поверхность 53 образована так, чтобы иметь центральную часть 53 а в продольном направлении для выступания наружу в направлении, параллельном оси вращения С 51, по сравнению в двумя концевыми частями 53b, 53 с. В соответствии с этим, когда это продольное направление находится в состоянии, обращенном в направлении MD, как удерживающая площадка 51, показанная на правой стороне на фиг. 3, форма контура удерживающей поверхности 53 имеет конфигурацию, которая проходит приблизительно вдоль траектории Тг удерживающей поверхности 53. Таким образом, скорость, с которой каждая из частей удерживающей поверхности 53 проходит положение Qin приема, может сохраняться приблизительно постоянной, позволяя в соответствии с этим непрерывному телу основного абсорбирующего тела 10 а, передаваемому с предыдущей операции (обработки) к положению Qin приема, возможность приниматься в вытянутом состоянии приблизительно без складок (морщин) вдоль всей длины в продольном направлении (ориентированном в направлении MD в положении Qin приема) приемной поверхности 53. При этом, как показано на фиг. 4 С, удерживающая поверхность 53 выполнена планарной в направлении ее ширины. Таким образом, непрерывное тело основного абсорбирующего тела 10 а может быть принято в вытянутом состоянии приблизительно без морщин вдоль всей длины (всей ширины) в направлении ширины (ориентированном в направлении CD в положении Qin приема) при приеме непрерывного тела основного абсорбирующего тела 10 а в положении Qin приема, показанном на фиг. 3. При этом в качестве примера этой формы удерживающей поверхности 53 в первом варианте осуществления удерживающая поверхность 53 показана с планарной центральной частью 53 а в продольном направлении с вышеупомянутым направлением радиуса вращения Dr как нормальной линии и двумя ее концевыми частями 53b, 53 с с планарной наклонной поверхностью (суженной поверхностью), однако удерживающая поверхность 53 этим не ограничена. Механизм 71 передачи На фиг. 5a-5c приведены пояснительные схематические изображения механизма 71 передачи, находящегося в положении Qout передачи. На фиг. 5a приведен схематический вид сбоку механизма 71 передачи. На фиг. 5b приведено сечение по линии В-В на фиг. 5a, а на фиг. 5c приведено сечение по линии СС на фиг. 5a. Механизм 71 передачи имеет пару непрерывных тел 20 а и 24 а, которые входят в контакт с ним, и включает в себя транспортный ролик 72 (соответствующий ролику), который транспортирует эти непрерывные тела 20 а и 24 а, и толкающий механизм 78, который прижимает внешнюю окружную поверхность транспортного ролика 72 к основному корпусу вращающегося барабана 42 для прижима этих непрерывных тел 20 а и 24 а к основного абсорбирующему телу 10 на удерживающей поверхности 53. Транспортный ролик 72 является роликом со своей секцией в форме правильного круга и установленным с возможностью вращения с вращающимся валом 73, ориентированным в направлении CD, в качестве центра вращения. Толкающий механизм 78 включает в себя эксцентричный вал 73, предусмотренный в качестве вышеупомянутого вала 73 вращения транспортного ролика 72, серводвигатель 79 (соответствует приводу),который приводит в движение транспортный ролик 72 для вращения эксцентричным валом в качестве центра вращения, и контроллер 180 серводвигателя (соответствует контроллеру), который управляет приводом серводвигателя 79. Следует отметить, что сила вращения, передаваемая серводвигателем 79,передается через силовой передаточный механизм 80 к эксцентричному валу 73 и посредством этого эксцентрично вращает транспортный ролик 72 эксцентричным валом 73 в качестве центра вращения. Эксцентричный вал 73, 73 предусмотрен вместе с транспортным роликом 72 и выступает с обоих его концов в направлении CD в местоположении, децентрированном относительно осевого центра С 72 транспортного ролика 72 на заданную величину , и поддерживается через посредство подшипниковых(опорных) узлов 74 на опорных боковых частях 31 а, 31 а стороны основания устройства 31 для изготов-8 022117 ления композитных тел. В частности, как показано на фиг. 5a, эксцентричный вал 73 предусмотрен в местоположении с центром, смещенным от осевого центра С 72, относительно направления радиуса вращения Dr основного корпуса 42 вращающегося барабана, который соединяет ось С 41 вращения основного корпуса вращающегося барабана 42 и вышеупомянутый осевой центр С 72 транспортного ролика. В этом случае транспортный ролик 72 вращается эксцентрично. Другими словами, транспортный ролик 72 во время своего одного поворота вдавливает свою внешнюю окружную поверхность внутрь вышеупомянутого направления радиуса вращения Dr и отводит назад свою внешнюю окружную поверхность наружу вышеупомянутого направления радиуса вращения Dr. Кроме того, другими словами, транспортный ролик 72 циклически изменяет величину, на которую его внешняя окружная поверхность выдвигается вдоль вышеупомянутого направления радиуса вращения Dr одним поворотом транспортного ролика 72 в качестве одного цикла. Следует отметить, что причиной этой эксцентричности является нижеследующее. На фиг. 6a и 6b приведены пояснительные схематические изображения этого. Как описано выше, удерживающая поверхность 53 выполнена в планарной конфигурации в направлении ширины (см. фиг. 4c). Как показано на фиг. 6b, ширина удерживающей поверхности 53 обращена к направлению Dc вращения основного корпуса вращающегося барабана 42 в положении Qout передачи. Когда удерживающая поверхность 53 передает основное абсорбирующее тело 10, сначала, как показано на фиг. 6a, выходная концевая часть 53d в направлении Dc вращения удерживающей поверхности 53 проходит положение Qout передачи, и после этого центральная часть 53 е и входная концевая часть 53u последовательно проходят положение Qout передачи, как показано на фиг. 6b. Однако в это время местоположения вышеупомянутого направления радиуса вращения Dr в каждой части удерживающей поверхности 53 будут отличаться друг от друга при прохождении положения Qout передачи вследствие того, что удерживающая поверхность 53 имеет планарную конфигурацию в направлении ширины. Например, как показано на фиг. 6a, выходная концевая часть 53d (или входная концевая часть 53u) удерживающей поверхности 53, имеющая больший радиус вращения Rd вокруг оси С 41 вращения основного корпуса 42 вращающегося барабана, будет проходить в местоположении снаружи, радиус вращения Dr, однако такой же радиус вращения Re, который меньше в центральной части 53 е, показанной на фиг. 6b, будет проходить местоположение внутри вдоль радиуса вращения Dr. Может быть случай, когда местоположение, в котором транспортный ролик 172 расположен, не двигаясь из данного местоположения, расстояние Ld (фиг. 6a) между выходной концевой частью 53d,когда эта выходная концевая часть 53d проходит положение Qout передачи, и внешней окружной поверхностью транспортного ролика 172, и расстояние Le (фиг. 6b) между центральной частью 53 е, когда эта центральная часть 53 е проходит положение Qout передачи, и внешней окружной поверхностью транспортного ролика 172, будут значительно отличаться. Как результат, сила нажима со стороны непрерывных тел 20 а и 24 а поясных элементов на основное абсорбирующее тело 10 будет значительно отличаться на выходной концевой части 53d и центральной части 53 е. Таким образом, существует опасность плохого соединения, вызываемого на выходной концевой части 53d или центральной части 53 е. Это справедливо для каждой из частей по всей площади удерживающей поверхности 53, то есть вышеупомянутая сила нажима отличается в каждой из частей удерживающей поверхности 53, приводя в результате к состояниям соединения, отличающимся в каждой из частей удерживающей поверхности 53,так что плохое соединение может иметь место в любой части в зависимости от случая применения. Следовательно, в этом первом варианте осуществления транспортный ролик 72 эксцентрично вращается для ограничения изменения этого расстояния L. На фиг. 7a-7f приведены пояснительные схематические изображения, показывающие движение эксцентричного вращения. Следует отметить, что на всех других чертежах приведены виды сбоку. В качестве основного движения этого эксцентричного вращения, в то время как одна удерживающая площадка 51 проходит положение Qout передачи, транспортный ролик 72 делает один поворот вместе с перемещением этой удерживающей площадки 51. Во время этого одного поворота величина, на которую внешняя окружная поверхность транспортного ролика 72 выступает по направлению к основному корпусу вращающегося барабана 42, увеличивается (например, см. фиг. 4f), когда местоположение удерживающей поверхности 53 в вышеупомянутом направлении радиуса вращения Dr смещается внутрь,и величина, на которую внешняя окружная поверхность транспортного ролика 72 выступает по направлению к основному корпусу вращающегося барабана 42 уменьшается (например, см. фиг. 7b или фиг. 7c), когда местоположение удерживающей поверхности 53 в направлении радиуса вращения Dr смещается наружу. В этом случае расстояние L между удерживающей поверхностью 53 и внешней окружной поверхностью транспортного ролика 72 может сохраняться приблизительно постоянным. Более конкретно, как показано на фиг. 7 а, когда центральная часть 53 е вышеупомянутого направления Dc вращения на удерживающей поверхности 53 проходит положение Qout передачи, величина, на которую выступает транспортный ролик 72, является максимальной. Как показано на фиг. 7b, величина выступания постепенно уменьшается при движении удерживающей поверхности 53, и после прохождения входного конца 53 и удерживающей поверхности 53, как показано на фиг. 7c, величина выступания минимальна, когда граничная часть между удерживающей площадкой 51 и соседней удерживающей площадкой 51 проходит положение Qout передачи, как показано на фиг. 7d. Кроме того, из этого состояния, как показано на фиг. 7e, после прохождения выходной части 53d удерживающей поверхности 53 вышеупомянутой соседней удерживающей площадки 51 и соседняя удерживающая площадка 51 начинает проходить положение Qout передачи, величина выступания постепенно увеличивается вместе с движением, и величина выступания максимальна, когда центральная часть 53 вышеупомянутой удерживающей поверхности 53 проходит положение Qout передачи, как показано на фиг. 7f. Это движение выступания повторяется каждый раз, когда удерживающая площадка 51 проходит с таким движением выступания в качестве одного цикла. Такое движение выступания выполняется путем управления приводом серводвигателя 79 (соответствующего электродвигателю) транспортного ролика 72, причем привод управляется посредством контроллера 180 серводвигателя. В этом случае контроллер 180 серводвигателя сделан способным к выполнению так называемого позиционного регулирования. Другими словами, контроллер 180 серводвигателя имеет вход для сигнала, показывающего уголповорота от датчика положения (не показан), который детектирует уголповорота основного корпуса вращающегося барабана 42. Аналогичным образом, сигнал, показывающий угол r поворота транспортного ролика 72, также вводится от датчика положения 174 (фиг. 8), который детектирует уголповорота транспортного ролика 72. Контроллер 180 серводвигателя регулирует вращение, сообщаемое посредством серводвигателя 79, так, чтобы транспортный ролик 72 делал один поворот, в то время как основной корпус вращающегося барабана 42 поворачивался на угол поворота (на одну пятую одного поворота, то есть на 72 в приведенном примере), соответствующий величине движения детали удерживающей контактной площадки 51, основываясь на этих сигналах. То есть транспортный ролик 72 регулируют приводиться во вращение для поворота на угол r поворота, имеющий величину, равную числу (пять в иллюстрируемом примере) раз углаповорота основного корпуса вращающегося барабана 42, причем это число является числом элементов удерживающих площадок 51. В этом случае транспортный ролик 72 поворачивается эксцентрично с движением удерживающей площадки 51. На фиг. 8 приведена блок-схема контроллера 180 серводвигателя. Контроллер 180 серводвигателя включает в себя калькулятор 181 величины сигнала управления, калькулятор 182 положения, калькулятор 183 сигнала управления скоростью, компаратор 184 скорости и калькулятор 185 тока возбуждения. Калькулятор 181 величины сигнала управления вычисляет величину а сигнала управления углом поворота транспортного ролика 72, основываясь на фактическом значениивышеупомянутого входного сигнала угла поворота от датчика положения основного корпуса вращающегося барабана 42. Вычисление выполняется, например, путем умножения фактического значенияугла поворота основного корпуса вращающегося барабана 42 на число раз (пять раз в иллюстрируемом примере), соответствующих числу удерживающих площадок, предусмотренных на основном корпусе вращающегося барабана 42, и расчетное значение (5), полученное в результате этого вычисления, устанавливают как величину а сигнала управления углом поворота транспортного ролика. После этого компаратор 182 положения сравнивает значение а сигнала управления этого угла вращения с действительным значением r угла поворота и вычисляет отклонение(угловое отклонение ) между этими двумя. Следует отметить,что фактическое значение r является входным сигналом от датчика 174 положения транспортного ролика 72, как упоминалось выше. Это угловое отклонениеявляется входным сигналом для калькулятора 183 сигнала управления скоростью. Калькулятор 183 сигнала управления скоростью выполняет заданное вычисление на основе вышеупомянутого углового отклоненияи получает значение a сигнала управления угловой скоростью (скоростью вращения) для передачи этого значения a сигнала управления к компаратору 184 скорости. Затем компаратор 184 скорости сравнивает это значение a сигнала управления угловой скоростью с фактическим значением r угловой скорости, передаваемым от датчика 174 положения транспортного ролика 72, для вычисления отклонения(отклоненияугловой скорости) между этими двумя значениями. После этого это отклонениеугловой скорости передается к калькулятору 185 тока возбуждения. Калькулятор 185 тока возбуждения выполняет заданное вычисление на основе вышеупомянутого отклоненияугловой скорости для получения значения тока I1 в цепи привода (тока возбуждения), который уменьшает отклонениеугловой скорости. Полученный ток I1 в цепи привода (возбуждения) подается к серводвигателю 79 для приведения в действие серводвигателя 79. Вместе с тем, как показано на фиг. 5b, так называемый механизм привода с охватывающим соединительным элементом используют в этом примере как силовой передаточный механизм, который передает движущую силу серводвигателя 79 для вращения транспортного ролика 72. Другими словами, шкив 79 р предусмотрен для вращающегося вала 79 а, приводимого во вращение посредством серводвигателя 79, и шкив 79 р также предусмотрен также для одного конца в направлении CD эксцентричного вала 73. Кроме того, между ними с возможностью вращения расположен промежуточный вал 80m, проходящий в направлении CD, а первый шкив 81 и второй шкив 82 предусмотрены для одного конца промежуточного вала 80m. Бесконечный зубчатый приводной ремень 85 охватывает как шкив 79 р для вращающегося приводного вала 79 а, так и первый шкив 81 промежуточного вала 80m, а бесконечный зубчатый приводной ремень 84 охватывает как второй шкив 82 промежуточного вала 80m, так и шкив 73 р эксцентричного вала 73, соединяя посредством этого вращающийся приводной вал 79 а и эксцентричный вал 73 через промежуточный вал 80m так, чтобы передавать силу вращения. Таким образом, сила вращения серводвигателя 79 для приведение во вращение транспортного ролика 72 передается для приведения транспортного ролика 72 во вращение. Следует отметить, что в этом примере, показанном на фиг. 5b, третий шкив 83 также предусмотрен для другого конца промежуточного вала 80m и, кроме того, шкив 73 р также предусмотрен для другого конца в направлении CD эксцентричного вала 73 с бесконечным зубчатым приводным ремнем 84, который также охватывает эти шкивы 83, 73 р. В этом случае сила вращения прикладывается также от другого конца в направлении CD транспортного ролика 72 для приведение во вращение через промежуточный вал 80m. Таким образом, в этом случае перекашивание и подобное действие транспортного ролика 72 ограничено по сравнению со случаем, когда сила вращения прикладывается только на одном конце транспортного ролика 72. Как результат может быть улучшена стабильность вращательного движения транспортного ролика 72. В этом случае, как показано на фиг. 9b и 9c, предпочтительно, чтобы транспортный ролик 72 был корпусом, отделенным от средней внутренней части 72 а, к которой эксцентричный вал 73 присоединен с внешней частью средней внутренней части 72, охваченной внешней окружной частью 72b, в то время как внешняя окружная часть 72b с подшипниковыми элементами 74 а, 74 а, расположенными между средней внутренней частью 72 а, предусмотрена с возможностью вращения вокруг осевого центра С 72 средней внутренней части 72 а. Кроме того, предпочтительно, чтобы форма поперечного сечения средней внутренней части 72 а была правильным кругом с вышеупомянутым эксцентричным валом 73, 73, предусмотренным в местоположении, с центром, смещенным на величинуэксцентриситета от ее осевого центра С 72. При такой конфигурации, когда серводвигатель 79 приводит во вращение среднюю внутреннюю часть 72 а, внешняя окружная поверхность внешней окружной части 72b выступает и отходит вдоль направления радиуса вращения Dr основного корпуса 42 вращающегося барабана с эксцентрическим вращением средней внутренней части 72 а. В этом случае расстояние L между внешней окружной поверхностью транспортного ролика 72 и удерживающей поверхностью 53 сохраняется приблизительно постоянным. Кроме того, при вышеупомянутой конфигурации внешняя окружная часть 72b может вращаться относительно средней внутренней части 72 а благодаря подшипникам 74 а, 74 а. Таким образом, даже если существует относительная скорость между внешней окружной поверхностью внешней окружной части 72b, являющейся внешней окружной поверхностью транспортного ролика 72, и удерживающей поверхностью 53 удерживающей площадки 51, то эта относительная скорость может быть быстро компенсирована относительным вращением между внешней окружной частью 72b и средней внутренней частью 72 а,приводя в результате к способности эффективного ограничения образования морщин (складок), возникающих на основном абсорбирующем теле 10 и непрерывных телах 20 а и 24 а поясных элементов вследствие различия в относительной скорости. Ниже приведены подробности. Например, как показано на виде сбоку, приведенном на фиг. 10, поскольку радиус вращения Re мал в центральной части 53 е по сравнению с радиусами вращения Rd, Ru в соответствующей выходной концевой части 53d и входной концевой части 53u, когда центральная часть 53 е удерживающей поверхности 53 проходит положение Qout передачи, скорость, с которой центральная часть 53 е движется в направлении Dc вращения, понижается по сравнению с этими концевыми частями 53d, 53u. Однако, что касается внешней окружной поверхности транспортного ролика 72, часть внешней окружной поверхности с большой величиной эксцентриситета противолежит центральной части 53 е удерживающей поверхности 53 вследствие величины выступания в этой точке, являющейся максимальной, делает периферийную скорость в этой части на внешней периферийной поверхности высокой. Таким образом, относительно большое отличие в относительной скорости может возникать между центральной частью 53 е удерживающей поверхности 53 и внешней периферийной поверхностью транспортного ролика 72, где это различие в относительной скорости создает морщины (складки) в основном абсорбирующем теле 10 и непрерывных телах 20 а и 24 а поясных элементов. Что касается этого места, то если внешняя окружная часть 72b выполнена с возможностью вращения относительно средней внутренней части 72 а, как упомянуто выше, то внешняя окружная часть 72b входит в контакт с непрерывными телами 20 а и 24 а поясных элементов или основным абсорбирующим телом 10 и подвергается воздействию силы вращения от этого контактного взаимодействия и приводится во вращение в соответствии с движением удерживающей поверхности 53. Таким образом, различие в относительной скорости между внешней окружной поверхностью транспортного ролика 72 и удерживающей поверхностью 53 эффективно ограничивается. Кроме того, как показано на фиг. 9c, предпочтительно, чтобы форма контура внешней окружной части 72b была формой, которая соответствует форме удерживающей поверхности 53 удерживающей площадки 51. Например, в этом первом варианте осуществления форма удерживающей поверхности 53 в положении Qout передачи, как упоминалось выше, выполнена в форме, где центральная часть 53 а в направлении CD выступает наружу в направлении радиуса вращения Dr (в направлении, параллельном оси вращения С 51), по сравнению с концевыми частями 53b, 53 с, расположенными на е обеих боковых сторонах. Поэтому в этом примере форма контура внешней окружной части 72b находится в пределах геометрии контура барабана, где центральная часть является вогнутой, по сравнению с двумя сторонами в направлении CD. При такой форме непрерывные тела 20 а и 24 а поясных элементов могут надежно прижиматься к основному абсорбирующему телу 10 внешней окружной частью 72b, а удерживающая поверхность 53, таким образом, улучшает характеристики соединения. Вместе с тем, в этом случае дополнительно предпочтительно, чтобы внешняя окружная часть 72b делилась на множество цилиндрических элементов 72b2, 72b1, 72b2 по направлению CD, в то время как каждый из цилиндрических элементов 72b2, 72b1, 72b2 устанавливался с возможностью вращения посредством средней внутренней части 72 через подшипниковые элементы 74b, 74b , как показано на фиг. 11b и 11c. В представленном примере внешняя окружная часть 72b составлена из трех цилиндрических элементов, являющихся цилиндрическим элементом 72b1 для центральной части в направлении CD и цилиндрическими элементами 72b2, 72b2 для концевых частей в направлении CD. При такой конфигурации каждый из цилиндрических элементов 72b2, 72b1, 72b2 вращается независимо как ведомые. Таким образом, как в вышеупомянутом случае, где внешняя окружная часть 72b находится в форме барабана с наружными диаметрами, отличающимися в зависимости от местоположения вдоль направления CD, может возникать проблема различий в относительной скорости, которые могут иметь место между частями, имеющими разные наружные диаметры. Кроме того, предпочтительно, чтобы часть 72s поверхностного слоя, включающая в себя внешнюю окружную поверхность транспортного ролика 72, была образована с эластичным материалом, имеющим гибкость, чтобы быть упруго деформируемым. В каждом из примеров, представленных на фиг. 5a-5c,примеров, представленных на фиг. 9a-9c, и примеров, представленных на фиг. 11a-11c, часть 72s поверхностного слоя транспортного ролика 72 образована с эластичными элементами. Похожий на губку полиуретановый каучук может служить в качестве примера материала, используемого для этого эластичного элемента. При вышеупомянутой конфигурации различие в относительной скорости между транспортным роликом 72 и удерживающей поверхностью 53 может компенсироваться также посредством упругой деформации части 72s поверхностного слоя, так что может дополнительно эффективно ограничиваться образование складок (морщин) на основном абсорбирующем теле 10 и непрерывных телах 20 а и 24 а поясных элементов. Кроме того, могут быть предотвращены сильные повреждения на основном абсорбирующем теле 10 и непрерывных телах 20 а и 24 а поясных элементов, которые прослаиваются между удерживающей поверхностью 53 и внешней окружной поверхностью транспортного ролика 72 во время передачи. Второй вариант осуществления настоящего изобретения На фиг. 12 приведено пояснительное схематическое изображение, показывающее вид сбоку передаточного механизма 91, соответствующего второму варианту осуществления. В первом варианте осуществления транспортный ролик 72 вращался эксцентрично при использовании эксцентричного вала 73 в толкающем механизме 78 механизма 71 передачи, однако второй вариант осуществления отличается от первого варианта осуществления в том отношении, что коромысло 94 использовано для выполнения толкающего движения внешней окружной поверхности транспортного ролика 92. Следует отметить, что другие элементы приблизительно такие же, как элементы первого варианта осуществления, и таким образом, ниже будет приведено пояснение только отличий, а описание подобных конфигураций исключены. Как показано на фиг. 12, механизм 91 передачи включает в себя в качестве толкающего механизма 93 коромысло 94, которое поддерживает транспортный ролик 92, и приводной механизм 97, который качает концевую часть коромысла 94, поддерживающую транспортный ролик 94, в направлении радиуса вращения Dr основного корпуса 42 вращающегося барабана. Коромысло 94, например, поддерживается посредством соединительного штыря 94 р с одним его концом в данном местоположении на части 31 а стороны основания устройства 31 для изготовления композитных тел. Другая концевая часть сделана быть способной качаться с этим соединительным штырем 94 р в качестве оси шарнира. С другой стороны, другая концевая часть имеет транспортный ролик 92 с правильным круглым поперечным сечением, обладающий возможностью вращаться вокруг своего осевого центра С 92 через подшипниковый узел, который не показан. Пара коромысел 94, 94 предусмотрена рядом в направлении CD, вместе с транспортным роликом 92, который поддерживается на двух концах в направлении CD. Например, цилиндрический элемент 97, например гидроцилиндр или пневмоцилиндр, используют в качестве приводного механизма 97. Концевая часть поршня 97 а цилиндрического элемента 97 соединена с другим концом части коромысла 94 через соединительный штырь 97 р. Поэтому другая концевая часть коромысла качается посредством поршня 97 а, движущегося телескопически, основываясь на контроле рабочей жидкости, например рабочей жидкости на масляной основе, и сжатого воздуха, продвигая посредством этого вперед и назад транспортный ролик 92 на другой концевой части в направлении радиуса вращения Dr основного корпуса вращающегося барабана 42. Это движение вперед и назад в основном такое же, что и движение в случае первого варианта осуществления. Другими словами, транспортный ролик 92 продвигается вперед к основному корпусу вращающегося барабана 42, когда положение удерживающей поверхности 53 в положении Qout передачи смещается внутрь вдоль направления радиуса вращения Dr основного корпуса вращающегося барабана 42, в то время как транспортный ролик отводится, когда положение удерживающей поверхности 53 перемещается наружу вдоль направления радиуса вращения Dr. В этом случае расстояние L между удерживающей поверхностью 53 и внешней окружной поверхностью транспортного ролика 92 может сохраняться приблизительно постоянным. Следует отметить, что транспортный ролик 92 может быть сконфигурирован как ведомый ролик,который вращается как ведомые ролики, или может быть конфигурирован как ведущий ролик, который приводится во вращение посредством соответствующего привода, например электродвигателя. Вместе с тем, упругий элемент, например пружинный элемент (не показан), может быть использован вместо цилиндрического элемента 97, предусмотренного к этому коромыслу 94. То есть упругая сила может прикладываться посредством этого упругого элемента так, чтобы транспортный ролик 92 постоянно выступал к основному корпусу вращающегося барабана 42 и к основному корпусу вращающегося барабана 42. В этом случае транспортный ролик 92 будет пассивно перемещаться вперед и назад вдоль направления радиуса вращения Dr так, чтобы транспортный ролик 92 выступал от удерживающей поверхности 53 вдоль вышеупомянутого направления радиуса вращения Dr в соответствии с изменениями положения удерживающей поверхности 53 вдоль вышеупомянутого направления радиуса вращения Dr. Другие варианты осуществления изобретения Выше было приведено описание вариантов осуществления настоящего изобретения, однако настоящее изобретение не ограничено такими вариантами осуществления, и они могут быть модифицированы следующим образом. В вышеупомянутых вариантах осуществления транспортные ролики 72, 92, имеющие формы в поперечном сечении в виде правильных кругов, показаны в качестве примеров, однако форма поперечного сечения транспортных роликов 72, 92 не ограничена такой конфигурацией и может быть должным образом изменена в зависимости от геометрии удерживающей поверхности 53 удерживающей площадки 51. Например, ролик с овальной формой поперечного сечения может быть использован в зависимости от геометрии удерживающий поверхности 53. В вышеупомянутом первом варианте осуществления контроллер серводвигателя задействуется для вращения транспортного ролика 72 благодаря увеличению скорости для угла r поворота, имеющего значение, равное числу (пяти в иллюстрируемом примере) угловповорота основного корпуса вращающегося барабана 42, причем это число является числом удерживающих площадок 51. То есть транспортный ролик 72 приводится во вращение пропорционально угловой скорости 0 основного корпуса вращающегося барабана 42, то есть пяти его угловым скоростям, однако скорость этим не ограничена. Например, скорость может циклически изменяться в зависимости от угловой скорости, которая является пятикратной угловой скоростью 0. Другими словами, угловая скорость может изменяться в соответствии с положением вышеупомянутого направления радиуса вращения Dr удерживающей поверхности 53 в положении Qout передачи. Например, угловая скорость транспортного ролика 72 уменьшается, когда величина, на которую внешняя окружная поверхность транспортного ролика 72 выступает к основному корпусу вращающегося барабана 42, увеличивается, когда положение основного корпуса вращающегося барабана 42 в вышеупомянутом направлении радиуса вращения Dr перемещается внутрь. Угловая скорость транспортного ролика 72 увеличивается, когда величина, на которую выступает внешняя окружная поверхность транспортного ролика 72, уменьшается, когда положение основного корпуса вращающегося барабана 42 в вышеупомянутом направлении радиуса вращения Dr перемещается наружу. В этом случае различие относительной скорости между удерживающей поверхностью 53 и транспортным роликом 72, описанное выше со ссылкой на фиг. 10, может уменьшаться, и как результат может эффективно ограничиваться образование складок (морщин) и т.п. на основном абсорбирующем теле 10 и непрерывных телах 20 а и 24 а поясных элементов вследствие различия в относительной скорости. Следует отметить, что контроллер 180 а серводвигателя, который циклически изменяет угловую скорость вышеупомянутого транспортного ролика 72, например, реализуют посредством контроллера,который выполняет управление скоростью. На фиг. 13 приведена его конфигурация. Контроллер 180 а серводвигателя включает в себя калькулятор 181 а величины сигнала управления угловой скоростью, вариатор 182 а циклической величины сигнала управления, компаратор 184 скорости и калькулятор 185 тока возбуждения. Калькулятор 181 а величины сигнала управления угловой скоростью вычисляет значение a величины сигнала временной угловой скорости транспортного ролика 72 на основе фактического значенияd угловой скорости основного корпуса вращающегося барабана 42, вводимого от датчика положения основного корпуса вращающегося барабана 42. Это вычисление выполняют путем умножения числа (пяти в представленном примере) удерживающих площадок 51, предусмотренных для основного корпуса вращающегося барабана 42, на вышеописанную фактическую величину d, и вычисленное значение(равное 5d), полученное в результате этого вычисления, устанавливают как значение а сигнала управления временной угловой скоростью транспортного ролика 72. Затем вариатор 182 а циклической величины сигнала управления делает вычисление путем добавления заданной функции (r) к вышеописанному значению а сигнала управления временной угловой скоростью и передает это расчетное значение (равное а + f(r как реальное значение ar сигнала управления угловой скоростью к компаратору 184 скорости. В этом случае, подобном случаю в вышеописанном первом варианте осуществления, r вычисляют путем умножения числа (пяти в иллюстрируемом примере) удерживающих площадок 51, предусмотренных для основного корпуса вращающегося барабана 42, на фактическое значениеугла поворота основного корпуса вращающегося барабана 42, передаваемое от датчика положения (r = 5). Дополнительно, функция f(r) является соответствующей функцией, которая изменяется с углом r между 0 и 360 как один цикл, и ее пример иллюстрируется как следующее уравнение (1) Следует отметить, что А является адекватной постоянной. После этого компаратор 184 скорости сравнивает это реальное значение ar сигнала управления с фактическим значением r угловой скорости, передаваемым от датчика 174 положения. Затем отклонение(отклонениеугловой скорости) между этими двумя значениями вычисляют для передачи этого отклоненияк калькулятору 185 тока возбуждения (в цепи привода). После этого калькулятор 185 тока возбуждения выполняет данное вычисление на основе этого отклоненияугловой скорости для значения тока 12 возбуждения, которое делает это отклонениеугловой скорости небольшим. Затем полученный ток 12 возбуждения подают к серводвигателю 79 для приведения в действие серводвигателя 79. В вышеупомянутом первом варианте осуществления транспортный ролик 72, связанный с механизмом 71 передачи, приводится во вращение посредством особого серводвигателя 79, однако это не является ограничением. Например, транспортный ролик 72 может вращаться благодаря передаче вращательного движения электродвигателя, который приводит во вращение основной корпус вращающегося барабана 42 вокруг оси С 41 вращения, через соответствующий механизм передачи вращательного движения к транспортному ролику 72. Следует отметить, что соответствующая последовательность зубчатых колес, кулачковый механизм и подобное устройство могут быть приведены в качестве примера механизма передачи вращательного движения, однако это не является ограничением до тех пор, пока он является механизмом, способным увеличивать скорости вращательного движения основного корпуса вращающегося барабана 42, благодаря коэффициенту ускорения числа удерживающих площадок 51 (в пять раз в иллюстрируемом примере, поскольку число удерживающих площадок 51 равно пяти), для передачи к транспортному ролику 72. Список ссылочных позиций 1 - подгузник одноразового использования, 1 а - полуфабрикат (композитное тело непрерывного листовидного элемента),3 - отверстие, предназначенное для охвата тела пользователя, 5 - отверстие для охвата ноги пользователя,10 - основное абсорбирующее тело (заготовка), 10 а - непрерывное тело основного абсорбирующего тела, 10 е - концевая часть,11 - абсорбирующее тело,12 - верхний листовой элемент,13 - тыльный листовой элемент,14 - герметизированный лист,15 - наружный покровный лист,16 - непроницаемый для жидкости лист,17 - упругий элемент,20 - передняя поясная часть, 20 а - непрерывное тело поясного элемента (непрерывный листовидный элемент),21 - нетканый материал,24 - задняя поясная часть, 24 а - непрерывное тело поясного элемента (непрерывный листовидный элемент),31 - устройство для изготовления композитного тела, 31 а - часть стороны основания,- 14022117 41 - вращающийся барабан,42 - основной корпус вращающегося барабана (вращающийся корпус),51 - удерживающая площадка (часть, удерживающая заготовку),53 - удерживающая поверхность, 53 а - центральная часть, 53b - концевая часть, 53 с - концевая часть, 53d - выходная концевая часть, 53 е - центральная часть, 53u - входная концевая часть,54 - воздухозаборное отверстие,61 а - ножевой ролик, 61 с - приемное средство,71 - механизм передачи,72 - транспортный ролик (ролик), 72 а - средняя внутренняя часть, 72b - внешняя окружная часть,72b1 - цилиндрический элемент, 72b2 - цилиндрический элемент, 72s - часть поверхностного слоя,73 - вращающийся вал (эксцентричный вал), 73 р - шкив,74 - подшипниковый узел, 74 а - подшипниковый узел, 74b - подшипниковый узел,78 - толкающий механизм,79 - серводвигатель (электродвигатель), 79 а - приводимый в движение вращающийся вал, 79 р шкив,80 - силовой передаточный механизм, 80m - промежуточный вал,81 - первый шкив,82 - второй шкив,83 - третий шкив,84 - зубчатый приводной ремень,85 - зубчатый приводной ремень,91 - механизм передачи,92 - транспортный ролик,93 - толкающий механизм,94 - коромысло, 94 р - соединительный штырь,97 - цилиндрический элемент (приводной механизм), 97 а - поршень,97 р - соединительный штырь,172 - транспортный ролик,174 - датчик положения,180 - контроллер серводвигателя, 180 а - контроллер серводвигателя,181 - калькулятор в величины сигнала управления, 181 а - калькулятор величины сигнала управления угловой скоростью,182 - калькулятор положения, 182 а - вариатор циклической величины сигнала управления,183 - калькулятор сигнала управления скоростью,184 - компаратор скорости,185 - калькулятор тока возбуждения,С 1 - середина, С 41 - ось вращения, С 51 - ось вращения, С 61 а - центр вала, С 72 - осевой центр, С 92 - осевой центр,Qin - положение приема, Qout - положение передачи (положение передачи заготовки),Dc - направление вращения, Dr - направление радиуса вращения,Tr - траектория. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для изготовления составного изделия, содержащего поясные элементы и абсорбирующий элемент, образуемого посредством присоединения удерживаемого абсорбирующего элемента(10), полученного из непрерывного листовидного элемента (10 а), к непрерывным листовидным элементам (20 а, 24 а), образующим поясные элементы (20, 24) изделия в положении передачи абсорбирующего элемента (10), содержащее вращающийся корпус (42), который выполнен с возможностью вращения вокруг оси (С 41) вращения; удерживающую абсорбирующий элемент часть (51), установленную на вращающемся корпусе (42),с обращенной наружу удерживающей поверхностью (53) в радиальном направлении от оси (С 41) корпуса, которая удерживает абсорбирующий элемент (10) в положении передачи абсорбирующего элемента,механизм (71) передачи абсорбирующего элемента, который позиционирован в положении передачи абсорбирующего элемента и который выполнен с возможностью передачи абсорбирующего элемента от удерживающей поверхности (53) к непрерывному листовидному элементу (20 а, 24 а), когда удерживающая поверхность проходит положение передачи абсорбирующего элемента, причм механизм (71) передачи абсорбирующего элемента имеет эксцентрично установленный транспортный ролик (72), который входит в контактное взаимодействие с непрерывными листовидными элементами (20 а, 24 а) для транспортирования непрерывного листовидного элемента, и нажимной механизм (78),который выполнен с возможностью выдвижения внешней окружной поверхности транспортного ролика(72) в радиальном направлении к оси (С 41) барабана (42) для прижима (поджима) непрерывных листовидных элементов (20 а, 24 а) к абсорбирующему элементу (10), и нажимной механизм (78) выполнен с возможностью изменения величины, на которую выдвигается внешняя окружная поверхность транспортного ролика (72) во взаимодействии с местоположением удерживающей поверхности (53) в радиальном направлении корпуса в положении передачи абсорбирующего элемента. 2. Устройство по п.1, в котором нажимной механизм (78) выполнен с возможностью увеличения величины, на которую выдвигается внешняя окружная периферийная поверхность ролика в положении передачи абсорбирующего элемента,когда местоположение удерживающей поверхности движется внутрь в радиальном направлении к оси(С 41) вращения, и нажимной механизм выполнен с возможностью уменьшения величины, на которую выдвигается внешняя окружная периферийная поверхность ролика, когда местоположение удерживающей поверхности движется наружу в радиальном направлении от оси (С 41) вращения. 3. Устройство по п.1 или 2, в котором нажимной механизм (78) имеет привод в виде серводвигателя, (79), который выполнен с возможностью перемещения внешней окружной поверхности транспортного ролика в радиальном направлении к оси (С 41) вращения и от не в радиальном направлении, и контроллер, который управляет приводом. 4. Устройство по п.3, в котором множество удерживающих абсорбирующий элемент частей (51) установлено с заданным угловым интервалом на внешней периферии вращающегося корпуса,транспортный ролик (72) установлен на вращающемся эксцентричном валу (73), децентрированный относительно осевого центра ролика и расположенный параллельно вращающемуся валу (С 41) вращающегося корпуса (42), а привод нажимного механизма (78) является (серво)электродвигателем (79), который выполнен с возможностью приведения во вращение транспортного ролика (72) с помощью эксцентричного вала (73) как центра вращения, и (серво)электродвигатель обеспечивает возможность ролику делать один поворот для каждой удерживающей абсорбирующий элемент части (51). 5. Устройство по п.4, в котором транспортный ролик (72) имеет среднюю внутреннюю часть (72 а) и внешнюю окружную часть(72b), расположенную так, чтобы покрывать внешнюю периферию средней внутренней части,внешняя окружная часть установлена с возможностью вращения посредством подшипниковой опоры (74), расположенной между внешней окружной частью и средней внутренней частью с центром средней внутренней части (72 а) в качестве центра (С 72) вращения, и эксцентричный вал (73) предусмотрен в местоположении, децентрированном относительно центра(С 72) средней внутренней части (72 а), а средняя внутренняя часть приводится во вращение эксцентричным валом в качестве центра вращения. 6. Устройство по п.5, в котором удерживающая поверхность (53) удерживающей абсорбирующей элемент части (51) в положении передачи абсорбирующего элемента имеет форму, где центральная часть в направлении вдоль вращающегося вала, нежели две концевые части, выступает наружу в радиальном направлении от оси вращения,а форма контура транспортного ролика выполнена в форме барабана, соответствуя форме удерживающей поверхности (53), где центральная часть в направлении вдоль вращающегося вала транспортного ролика является вогнутой, нежели две концевые части. 7. Устройство по п.5 или 6, в котором внешняя окружная часть конфигурирована с множеством цилиндрических элементов, расположенных в направлении вдоль вращающегося вала транспортного ролика, а каждый из цилиндрических элементов установлен с возможностью вращения посредством средней внутренней части посредством подшипниковых опор, каждая из которых предусмотрена для соответствующего одного из цилиндрических элементов. 8. Устройство по одному из пп.4-7, в котором угловая скорость транспортного ролика, приводимого во вращение, изменяется во взаимодействии с местоположением удерживающей поверхности в радиальном направлении корпуса в положении передачи абсорбирующего элемента. 9. Устройство по одному из пп.1-8, в котором часть поверхностного слоя внешней окружной поверхности транспортного ролика образована эластичным элементом, обладающим гибкостью, чтобы упруго деформироваться.
МПК / Метки
МПК: A61F 13/15, A61F 13/49, B65H 37/04
Метки: непрерывных, устройство, композитных, тел, элементов, листовидных, изготовления
Код ссылки
<a href="https://eas.patents.su/24-22117-ustrojjstvo-dlya-izgotovleniya-kompozitnyh-tel-nepreryvnyh-listovidnyh-elementov.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство для изготовления композитных тел непрерывных листовидных элементов</a>
Устройство для изготовления стенных элементов
Номер патента: 3038
Опубликовано: 26.12.2002
Автор: Крекэ Эдмонд Д.
МПК: B28B 7/08
Метки: элементов, стенных, изготовления, устройство
Формула / Реферат:
1. Способ изготовления больших стенных элементов, которые содержат, по меньшей мере, два слоя (11, 12) - наружный слой (11) и несущий или промежуточный слой (12) - и встроенные элементы (14, 15, 16), для наружных и внутренних стен и перекрытий зданий, включающий следующие этапы: a) поворотный стол (1), имеющий две расположенные под углом друг к другу опорные поверхности (3, 4) для изготавливаемых стенных элементов, перемещают в сборочное...
Способ изготовления фильтровальных элементов блока контактных фильтров, блок контактных фильтров (варианты), и устройство для изготовления фильтровальных элементов блока контактных фильтров
Номер патента: 13171
Опубликовано: 26.02.2010
Автор: Клинкбю Джон
МПК: B29C 47/24, B01J 19/32, B29C 47/12...
Метки: блока, фильтровальных, устройство, изготовления, способ, блок, варианты, контактных, фильтров, элементов
Формула / Реферат:
1. Способ изготовления фильтровальных элементов блока контактных фильтров, предназначенных для биологической очистки воды, с использованием устройства (10), содержащегорезервуар для хранения гранулированного материала, имеющего первую точку плавления и включающего пенообразующую присадку, имеющую вторую точку плавления;блок (12) нагревания и сжатия гранулированного материала, включающий камеру, имеющую впускное отверстие (18), соединенное с...
Способ и устройство для изготовления изоляционных элементов из минеральных волокон
Номер патента: 12151
Опубликовано: 28.08.2009
Автор: Клозе Герд-Рюдигер
МПК: E04B 1/80
Метки: минеральных, волокон, изготовления, устройство, изоляционных, способ, элементов
Формула / Реферат:
1. Способ изготовления изоляционных плит из минеральных волокон по крайней мере с одной эластифицированной боковой поверхностью и/или по крайней мере одним эластифицированным участком боковой поверхности, отличающийся тем, что эластифицирование производится с помощью локального отрезания по крайней мере одной боковой поверхности и/или по крайней мере одного участка боковой поверхности изоляционной плиты. 2. Способ по п.1, отличающийся тем, что...
Способ подготовки и чистки элементов оснастки, используемой для изготовления компонентов из композиционных материалов, и соответствующее устройство
Номер патента: 13442
Опубликовано: 30.04.2010
Авторы: Сантос-Гомес Хосе-Мануэль, Лопес-Редондо Анхель
МПК: B23K 26/16, B23K 26/42, B23K 26/36...
Метки: соответствующее, способ, компонентов, подготовки, оснастки, изготовления, материалов, чистки, элементов, используемой, устройство, композиционных
Формула / Реферат:
1. Способ подготовки и чистки элементов оснастки, таких как пресс-формы, пуансоны, уголки и модули-вкладыши, используемой для изготовления компонентов из композиционных материалов, преимущественно в производстве компонентов для авиационной промышленности, отличающийся тем, чтопутем обдувки и всасывания с элементов оснастки удаляют слои поверхностной смолы,выполняют стадию чистки с помощью лазера и всасывания, удерживая элемент (3) оснастки...
Способ и устройство для изготовления формованных деталей, а также применение формованных деталей в качестве теплоизолирующих и/или звукопоглощающих элементов
Номер патента: 17247
Опубликовано: 30.11.2012
Автор: Дашкайт Аксель
МПК: B60R 13/08
Метки: устройство, также, формованных, применение, деталей, теплоизолирующих, способ, изготовления, звукопоглощающих, качестве, элементов
Формула / Реферат:
1. Способ изготовления формованных деталей из минеральных волокон, при котором минеральные волокна, агломерированные в виде хлопьев и/или гранул, помещают в пресс-форму со связующими веществами или без них с заданной объемной плотностью 20-1000 кг/м3 и/или заданным отношением массы к единице площади 200-7500 г/м2 с последующим прессованием в формованную деталь.2. Способ изготовления формованных деталей из минеральных волокон, при котором...
Предыдущий патент: Пестицидные смеси, включающие изоксазолиновые производные и инсектицид
Следующий патент: Ингибиторы протеазы hcv
Случайный патент: Стабильные водные суспензии