Привод попеременного действия для велосипедов и транспортных средств, приводимых в движение аналогичным велосипедам образом
Формула / Реферат
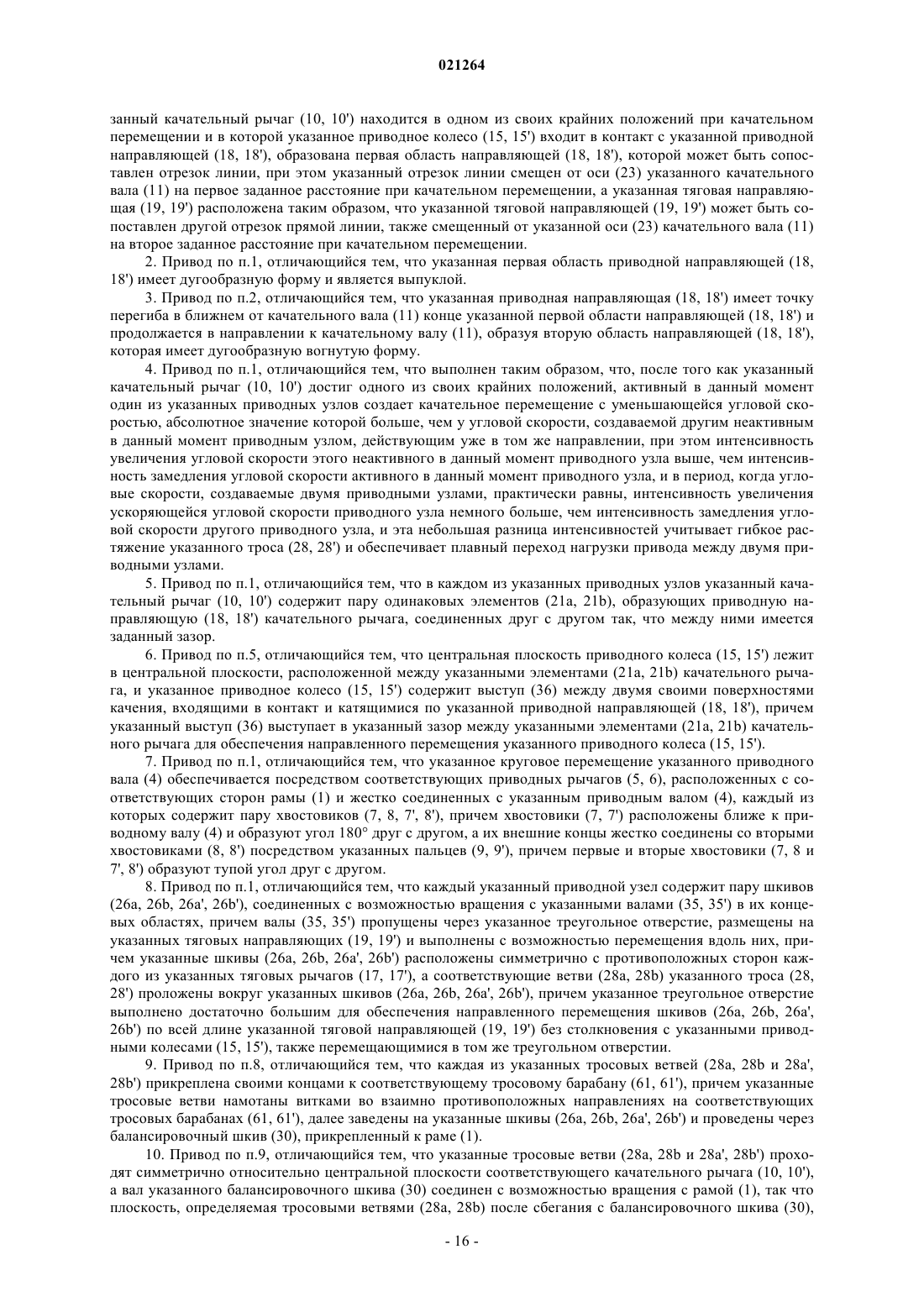
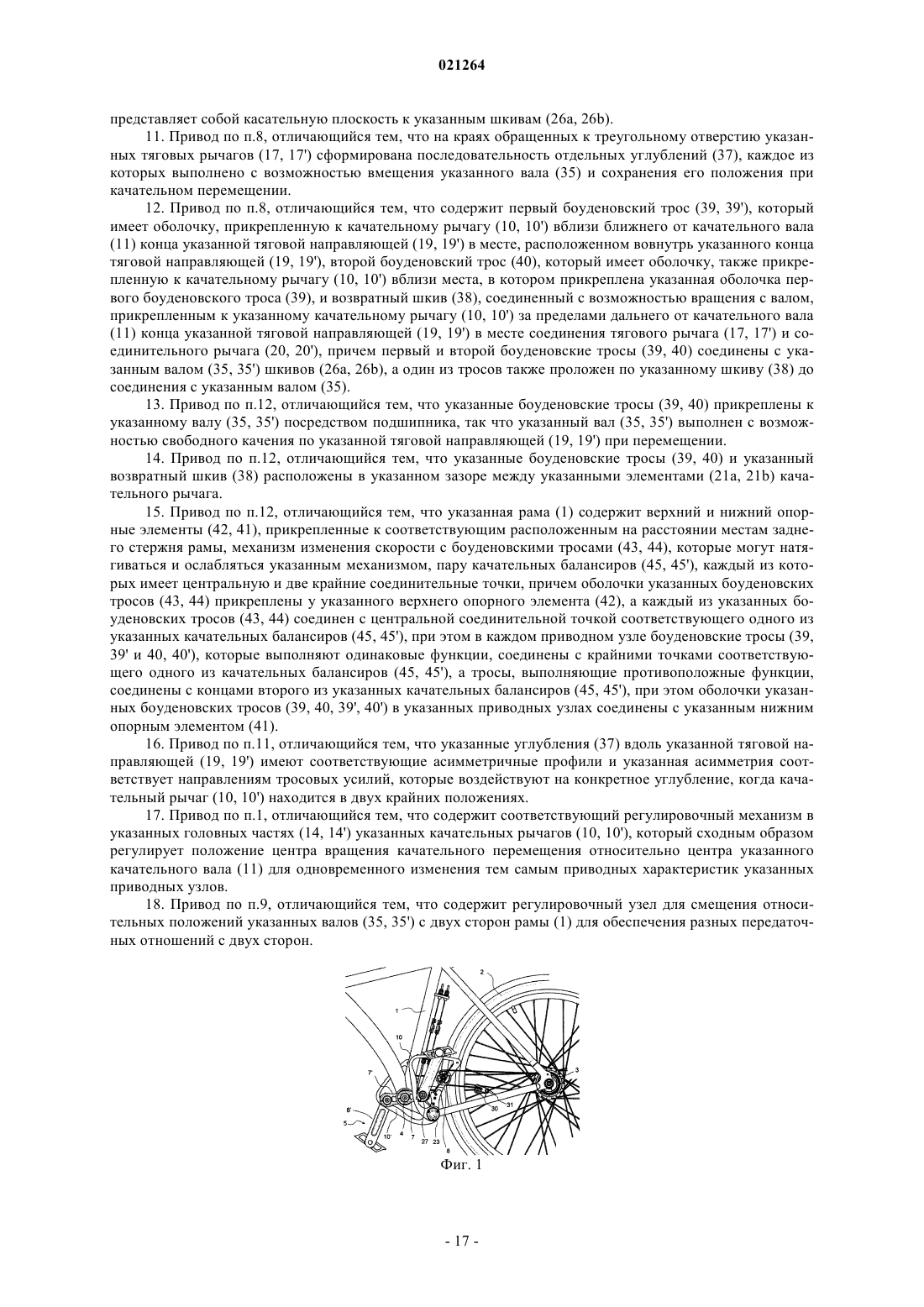
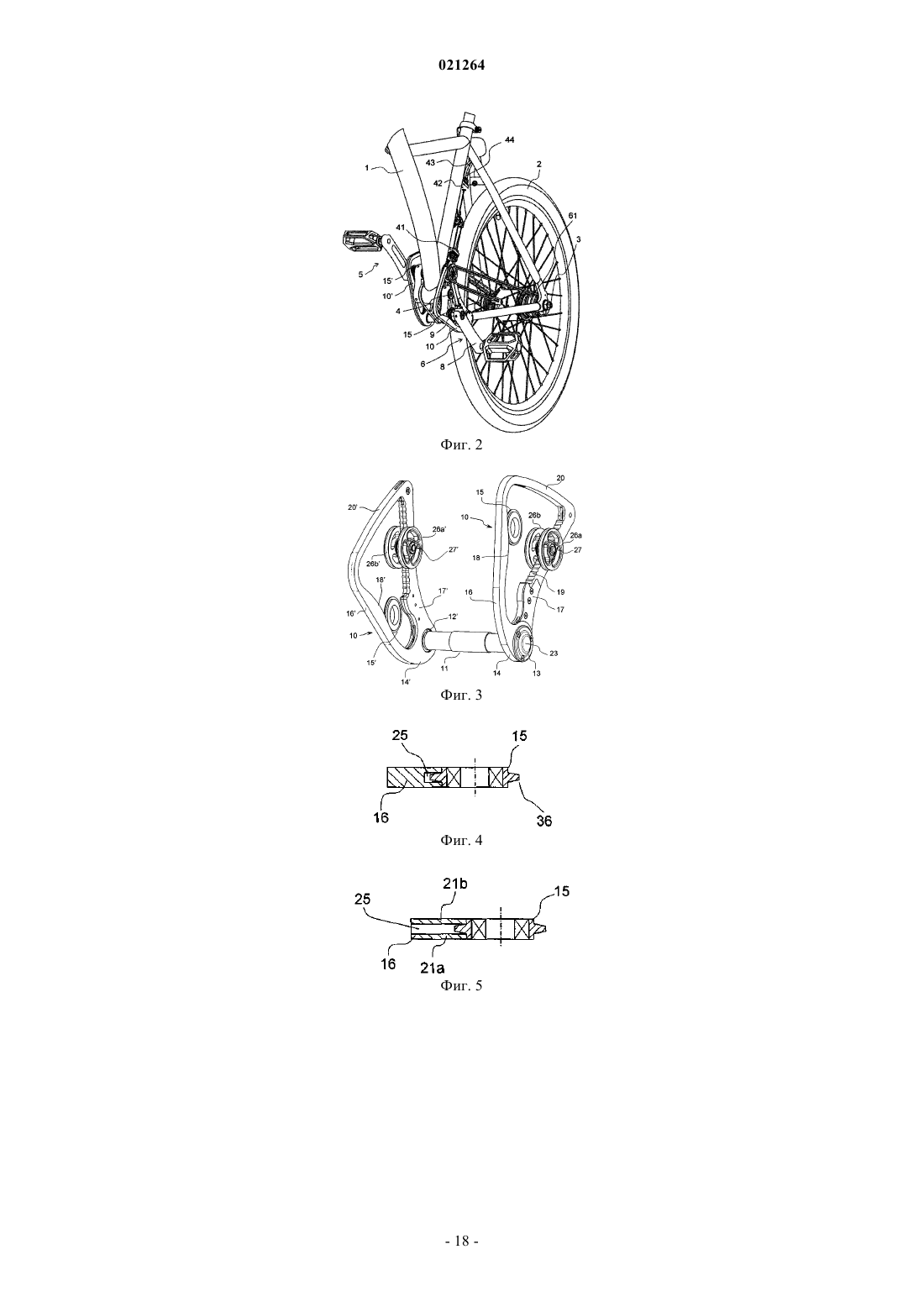
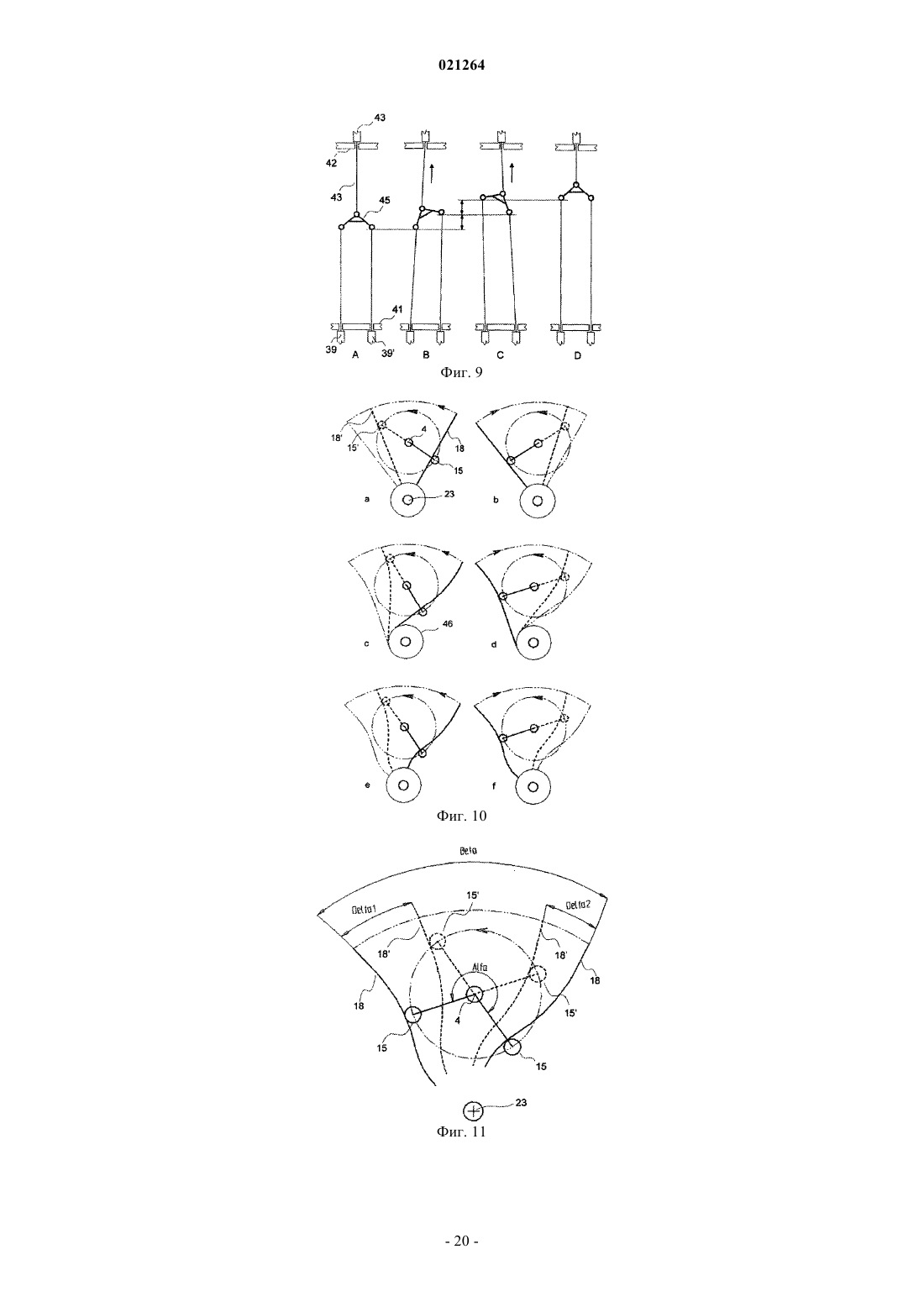
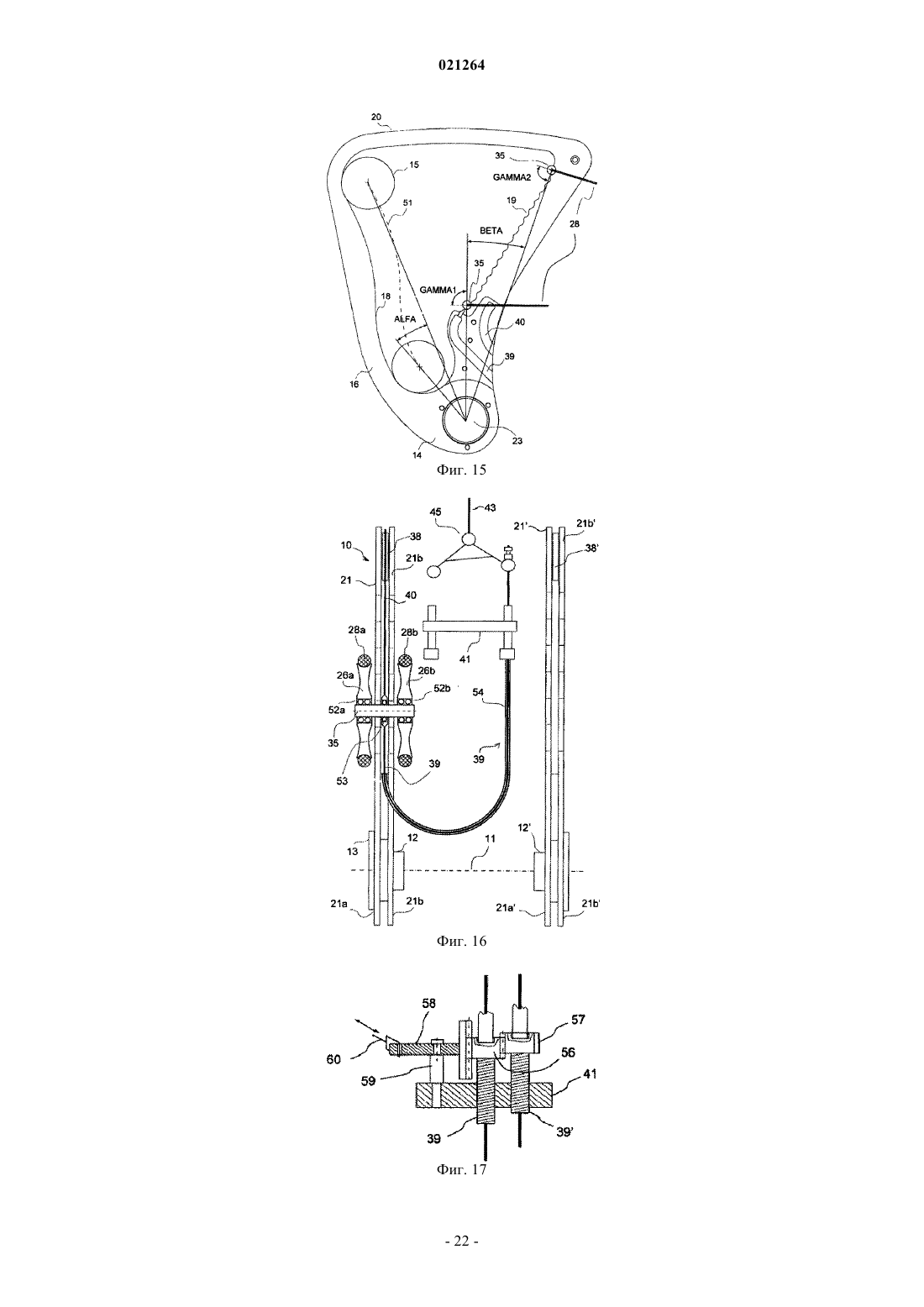
1. Привод попеременного действия, предназначенный для велосипедов и транспортных средств, приводимых в движение аналогичным велосипедам образом, содержащих раму (1) и ведущее колесо (2), соединенное с возможностью вращения с рамой (1), причем указанный привод содержит пару приводных узлов одинаковой конструкции с противоположными приводными направлениями, прикрепленных с противоположных сторон рамы (1), причем указанные приводные узлы содержат соответствующие качательные рычаги (10, 10'), шарнирно соединенные с общим качательным валом (11), прикрепленным к раме (1), и выполненные с возможностью осуществления попеременного качательного перемещения вокруг качательного вала (11), причем каждый качательный рычаг (10, 10') имеет соответствующий приводной рычаг (16, 16') с краем, образующим приводную направляющую (18, 18'), причем указанные приводные узлы содержат общий приводной вал (4), соединенный шарнирно с указанной рамой (1) для кругового перемещения вокруг своей оси, и каждый из указанных приводных узлов содержит соответствующий палец (9, 9'), ось которого, по существу, параллельна и радиально сдвинута от указанной оси приводного вала (4), соединенный с указанным общим приводным валом (4) и вращающийся по соответствующей круговой траектории вокруг указанной оси приводного вала (4), пару приводных колес (15, 15'), каждое из которых соединено с возможностью вращения с указанным пальцем (9, 9'), причем каждое из указанных колес (15, 15') размещено в одной из указанных приводных направляющих (18, 18') так, что вращение указанных приводных колес (15, 15'), катящихся в первом и затем в обратном втором направлении по указанной соответствующей приводной направляющей (18, 18'), вызывает попеременное качательное перемещение указанного качательного рычага (10, 10'), причем указанные приводные колеса (15, 15') механически связаны друг с другом и в каждом положении сдвинуты на угол 180° друг относительно друга вокруг указанного приводного вала (4), пару гибких тросов (28, 28'), каждый из которых соединен с соответствующим одним из указанных качательных рычагов, и соответствующие смещенные тросовые барабаны (61, 61'), закрепленные на валу указанного ведущего колеса (2) и соединенные с ведущим колесом (2) с обеспечением передачи момента вращения на указанное колесо (2) от указанного тросового барабана (61, 61') при вращении тросового барабана (61, 61') в прямом направлении, причем каждый из указанных тросов (28, 28') соединен и намотан с заданным количеством витков на соответствующий тросовый барабан (61, 61') так, что при работе привода количество указанных витков изменяется взаимно попеременно, при этом каждый качательный рычаг (10, 10') дополнительно содержит головную часть (14, 14'), окружающую указанный качательный вал (11) и соединенную ближним от качательного вала (11) концом указанного приводного рычага (16, 16'), тяговый рычаг (17, 17'), соединенный своим ближним от качательного вала (11) концом с указанной головной частью (14, 14') так, что указанный приводной рычаг (16, 16') образует угол с указанным тяговым рычагом (17, 17'), и соединительный рычаг (20, 20'), соединяющий между собой дальние от качательного вала (11) концы указанного приводного рычага (16, 16') и указанного тягового рычага (17, 17'), причем указанный приводной рычаг (16, 16'), указанный тяговый рычаг (17, 17') и соединительный рычаг (20, 20') совместно ограничивают, по существу, треугольное отверстие, в котором расположено указанное приводное колесо (15, 15') и вал указанного приводного колеса (15, 15'), причем край тягового рычага (17, 17'), направленный к указанному треугольному отверстию, образует тяговую направляющую (19, 19'), которая, по существу, определяет передаточное отношение привода, при этом каждый приводной узел содержит по меньшей мере один шкив (26, 26'), который содержит вал (35, 35'), выполненный с возможностью направленного перемещения по указанной тяговой направляющей (19, 19'), причем указанная приводная направляющая (18, 18') выполнена так, что между самой дальней ее точкой от качательного вала (11) и ближней точкой, в которой указанный качательный рычаг (10, 10') находится в одном из своих крайних положений при качательном перемещении и в которой указанное приводное колесо (15, 15') входит в контакт с указанной приводной направляющей (18, 18'), образована первая область направляющей (18, 18'), которой может быть сопоставлен отрезок линии, при этом указанный отрезок линии смещен от оси (23) указанного качательного вала (11) на первое заданное расстояние при качательном перемещении, а указанная тяговая направляющая (19, 19') расположена таким образом, что указанной тяговой направляющей (19, 19') может быть сопоставлен другой отрезок прямой линии, также смещенный от указанной оси (23) качательного вала (11) на второе заданное расстояние при качательном перемещении.
2. Привод по п.1, отличающийся тем, что указанная первая область приводной направляющей (18, 18') имеет дугообразную форму и является выпуклой.
3. Привод по п.2, отличающийся тем, что указанная приводная направляющая (18, 18') имеет точку перегиба в ближнем от качательного вала (11) конце указанной первой области направляющей (18, 18') и продолжается в направлении к качательному валу (11), образуя вторую область направляющей (18, 18'), которая имеет дугообразную вогнутую форму.
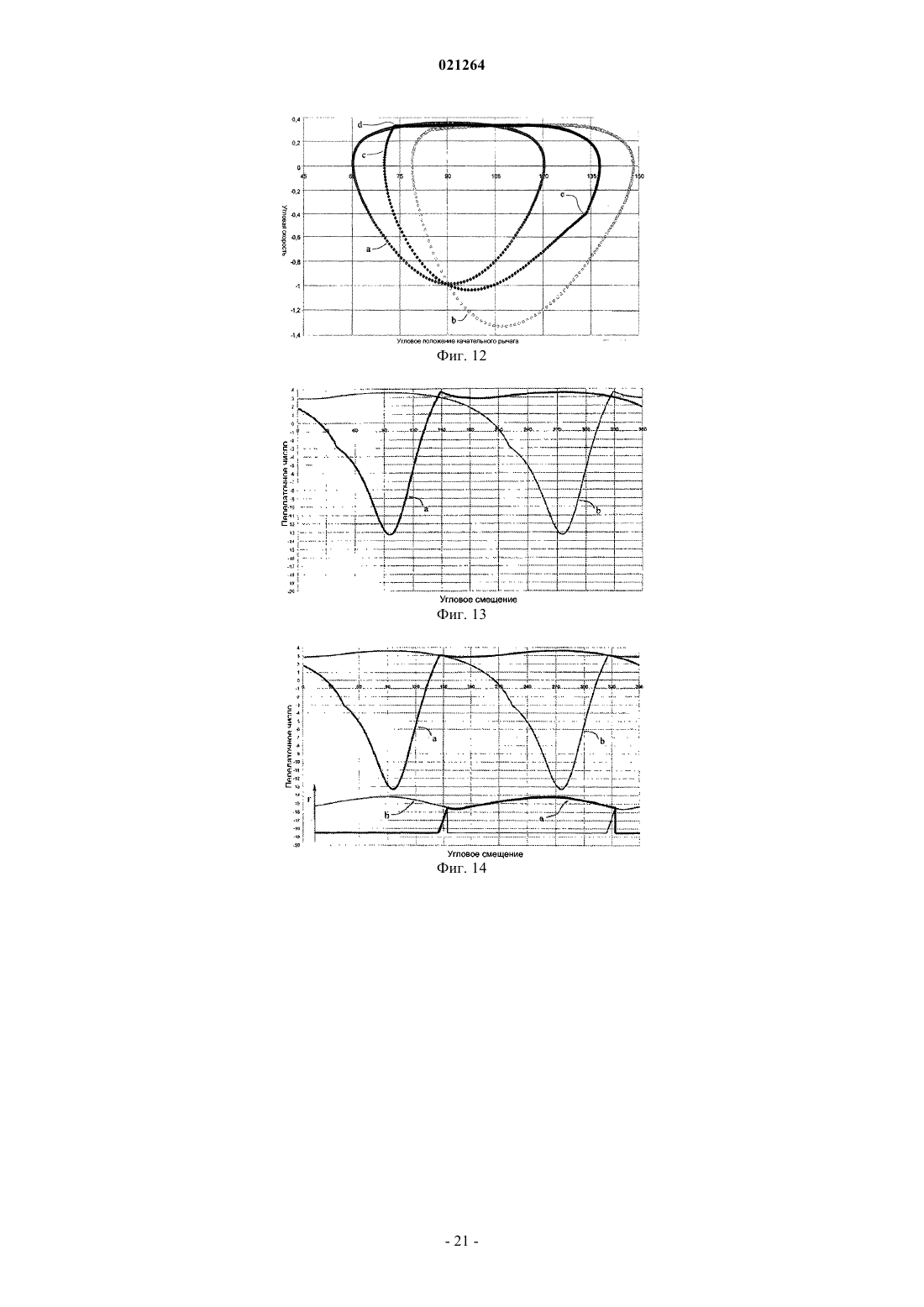
4. Привод по п.1, отличающийся тем, что выполнен таким образом, что, после того как указанный качательный рычаг (10, 10') достиг одного из своих крайних положений, активный в данный момент один из указанных приводных узлов создает качательное перемещение с уменьшающейся угловой скоростью, абсолютное значение которой больше, чем у угловой скорости, создаваемой другим неактивным в данный момент приводным узлом, действующим уже в том же направлении, при этом интенсивность увеличения угловой скорости этого неактивного в данный момент приводного узла выше, чем интенсивность замедления угловой скорости активного в данный момент приводного узла, и в период, когда угловые скорости, создаваемые двумя приводными узлами, практически равны, интенсивность увеличения ускоряющейся угловой скорости приводного узла немного больше, чем интенсивность замедления угловой скорости другого приводного узла, и эта небольшая разница интенсивностей учитывает гибкое растяжение указанного троса (28, 28') и обеспечивает плавный переход нагрузки привода между двумя приводными узлами.
5. Привод по п.1, отличающийся тем, что в каждом из указанных приводных узлов указанный качательный рычаг (10, 10') содержит пару одинаковых элементов (21а, 21b), образующих приводную направляющую (18, 18') качательного рычага, соединенных друг с другом так, что между ними имеется заданный зазор.
6. Привод по п.5, отличающийся тем, что центральная плоскость приводного колеса (15, 15') лежит в центральной плоскости, расположенной между указанными элементами (21а, 21b) качательного рычага, и указанное приводное колесо (15, 15') содержит выступ (36) между двумя своими поверхностями качения, входящими в контакт и катящимися по указанной приводной направляющей (18, 18'), причем указанный выступ (36) выступает в указанный зазор между указанными элементами (21а, 21b) качательного рычага для обеспечения направленного перемещения указанного приводного колеса (15, 15').
7. Привод по п.1, отличающийся тем, что указанное круговое перемещение указанного приводного вала (4) обеспечивается посредством соответствующих приводных рычагов (5, 6), расположенных с соответствующих сторон рамы (1) и жестко соединенных с указанным приводным валом (4), каждый из которых содержит пару хвостовиков (7, 8, 7', 8'), причем хвостовики (7, 7') расположены ближе к приводному валу (4) и образуют угол 180° друг с другом, а их внешние концы жестко соединены со вторыми хвостовиками (8, 8') посредством указанных пальцев (9, 9'), причем первые и вторые хвостовики (7, 8 и 7', 8') образуют тупой угол друг с другом.
8. Привод по п.1, отличающийся тем, что каждый указанный приводной узел содержит пару шкивов (26а, 26b, 26a', 26b'), соединенных с возможностью вращения с указанными валами (35, 35') в их концевых областях, причем валы (35, 35') пропущены через указанное треугольное отверстие, размещены на указанных тяговых направляющих (19, 19') и выполнены с возможностью перемещения вдоль них, причем указанные шкивы (26а, 26b, 26a', 26b') расположены симметрично с противоположных сторон каждого из указанных тяговых рычагов (17, 17'), а соответствующие ветви (28а, 28b) указанного троса (28, 28') проложены вокруг указанных шкивов (26а, 26b, 26а', 26b'), причем указанное треугольное отверстие выполнено достаточно большим для обеспечения направленного перемещения шкивов (26а, 26b, 26a', 26b') по всей длине указанной тяговой направляющей (19, 19') без столкновения с указанными приводными колесами (15, 15'), также перемещающимися в том же треугольном отверстии.
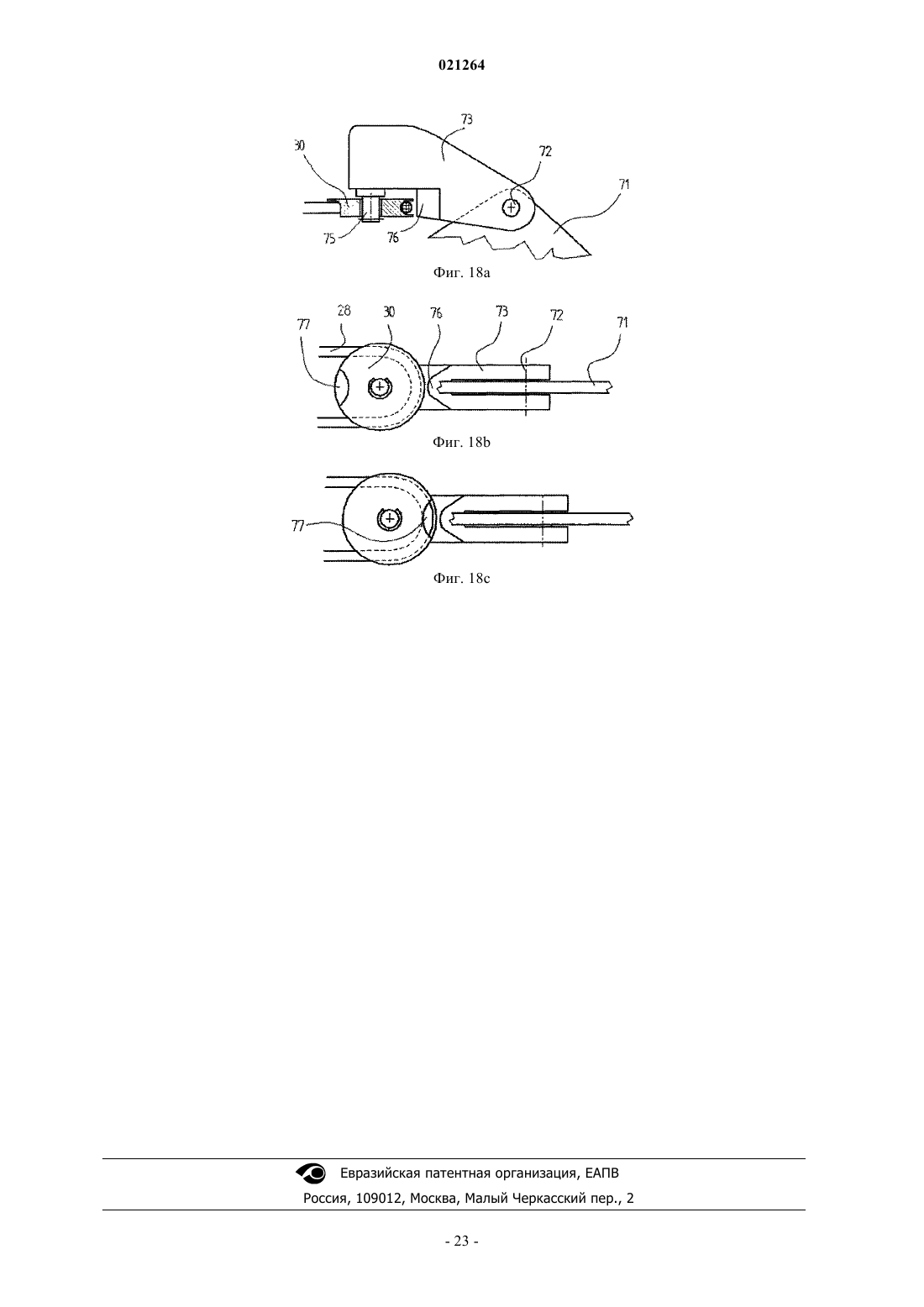
9. Привод по п.8, отличающийся тем, что каждая из указанных тросовых ветвей (28а, 28b и 28а', 28b') прикреплена своими концами к соответствующему тросовому барабану (61, 61'), причем указанные тросовые ветви намотаны витками во взаимно противоположных направлениях на соответствующих тросовых барабанах (61, 61'), далее заведены на указанные шкивы (26а, 26b, 26a', 26b') и проведены через балансировочный шкив (30), прикрепленный к раме (1).
10. Привод по п.9, отличающийся тем, что указанные тросовые ветви (28а, 28b и 28а', 28b') проходят симметрично относительно центральной плоскости соответствующего качательного рычага (10, 10'), а вал указанного балансировочного шкива (30) соединен с возможностью вращения с рамой (1), так что плоскость, определяемая тросовыми ветвями (28а, 28b) после сбегания с балансировочного шкива (30), представляет собой касательную плоскость к указанным шкивам (26а, 26b).
11. Привод по п.8, отличающийся тем, что на краях обращенных к треугольному отверстию указанных тяговых рычагов (17, 17') сформирована последовательность отдельных углублений (37), каждое из которых выполнено с возможностью вмещения указанного вала (35) и сохранения его положения при качательном перемещении.
12. Привод по п.8, отличающийся тем, что содержит первый боуденовский трос (39, 39'), который имеет оболочку, прикрепленную к качательному рычагу (10, 10') вблизи ближнего от качательного вала (11) конца указанной тяговой направляющей (19, 19') в месте, расположенном вовнутрь указанного конца тяговой направляющей (19, 19'), второй боуденовский трос (40), который имеет оболочку, также прикрепленную к качательному рычагу (10, 10') вблизи места, в котором прикреплена указанная оболочка первого боуденовского троса (39), и возвратный шкив (38), соединенный с возможностью вращения с валом, прикрепленным к указанному качательному рычагу (10, 10') за пределами дальнего от качательного вала (11) конца указанной тяговой направляющей (19, 19') в месте соединения тягового рычага (17, 17') и соединительного рычага (20, 20'), причем первый и второй боуденовские тросы (39, 40) соединены с указанным валом (35, 35') шкивов (26а, 26b), а один из тросов также проложен по указанному шкиву (38) до соединения с указанным валом (35).
13. Привод по п.12, отличающийся тем, что указанные боуденовские тросы (39, 40) прикреплены к указанному валу (35, 35') посредством подшипника, так что указанный вал (35, 35') выполнен с возможностью свободного качения по указанной тяговой направляющей (19, 19') при перемещении.
14. Привод по п.12, отличающийся тем, что указанные боуденовские тросы (39, 40) и указанный возвратный шкив (38) расположены в указанном зазоре между указанными элементами (21а, 21b) качательного рычага.
15. Привод по п.12, отличающийся тем, что указанная рама (1) содержит верхний и нижний опорные элементы (42, 41), прикрепленные к соответствующим расположенным на расстоянии местам заднего стержня рамы, механизм изменения скорости с боуденовскими тросами (43, 44), которые могут натягиваться и ослабляться указанным механизмом, пару качательных балансиров (45, 45'), каждый из которых имеет центральную и две крайние соединительные точки, причем оболочки указанных боуденовских тросов (43, 44) прикреплены у указанного верхнего опорного элемента (42), а каждый из указанных боуденовских тросов (43, 44) соединен с центральной соединительной точкой соответствующего одного из указанных качательных балансиров (45, 45'), при этом в каждом приводном узле боуденовские тросы (39, 39' и 40, 40'), которые выполняют одинаковые функции, соединены с крайними точками соответствующего одного из качательных балансиров (45, 45'), а тросы, выполняющие противоположные функции, соединены с концами второго из указанных качательных балансиров (45, 45'), при этом оболочки указанных боуденовских тросов (39, 40, 39', 40') в указанных приводных узлах соединены с указанным нижним опорным элементом (41).
16. Привод по п.11, отличающийся тем, что указанные углубления (37) вдоль указанной тяговой направляющей (19, 19') имеют соответствующие асимметричные профили и указанная асимметрия соответствует направлениям тросовых усилий, которые воздействуют на конкретное углубление, когда качательный рычаг (10, 10') находится в двух крайних положениях.
17. Привод по п.1, отличающийся тем, что содержит соответствующий регулировочный механизм в указанных головных частях (14, 14') указанных качательных рычагов (10, 10'), который сходным образом регулирует положение центра вращения качательного перемещения относительно центра указанного качательного вала (11) для одновременного изменения тем самым приводных характеристик указанных приводных узлов.
18. Привод по п.9, отличающийся тем, что содержит регулировочный узел для смещения относительных положений указанных валов (35, 35') с двух сторон рамы (1) для обеспечения разных передаточных отношений с двух сторон.


Текст
ПРИВОД ПОПЕРЕМЕННОГО ДЕЙСТВИЯ ДЛЯ ВЕЛОСИПЕДОВ И ТРАНСПОРТНЫХ СРЕДСТВ, ПРИВОДИМЫХ В ДВИЖЕНИЕ АНАЛОГИЧНЫМ ВЕЛОСИПЕДАМ ОБРАЗОМ В изобретении представлен привод попеременного действия, предназначенный для велосипедов и транспортных средств, приводимых в движение аналогичным велосипедам образом, в которых вращение приводных педалей преобразуется в возвратно-поступательное качательное перемещение качательных рычагов, причем качательные рычаги имеют соответствующие приводные рычаги (16, 16'), соединенные с головной частью (14, 14'), окружающей качательный вал (11) педалей, от которого отходит тяговый рычаг (17, 17'), образующий угол с приводным рычагом (16, 16'), при этом дальние от качательного вала (11) концы приводного и тягового рычагов (16, 17) соединены друг с другом посредством соединительного рычага (20, 20'). Между указанными рычагами образовано, по существу, треугольное отверстие, и в данном треугольном отверстии расположен вал приводного колеса (15, 15'), причем тяговый рычаг (17, 17') образует тяговую направляющую (19, 19'), а гибкий тяговый трос (28), который вращает ведущее колесо транспортного средства, проведен вокруг по меньшей мере одного шкива (26), который имеет вал (35), направляемый и перемещаемый по тяговой направляющей (19, 19') для регулировки передаточного отношения. Область техники, к которой относится изобретение Изобретение относится к приводу попеременного действия, предназначенному главным образом для велосипедов и транспортных средств, приводимых в движение аналогично велосипедам. Сведения о предшествующем уровне техники Термин "привод попеременного действия" обозначает приводную систему, в которой выходной элемент приводного источника, который обеспечивает приводную энергию, вращается по круговой траектории, и данное круговое перемещение сначала преобразуется в попеременное качательное перемещение, затем используется качательный элемент для вращения ведущего колеса транспортного средства,закрепленного на раме транспортного средства. Условием работы привода попеременного действия является наличие пары одинаковых, но расположенных напротив друг друга приводных узлов, а траектории перемещения приводных узлов должны иметь определенное перекрытие, так чтобы в каждый момент времени по меньшей мере один из узлов находился в рабочем положении. Привод попеременного действия, предназначенный для использования в велосипеде, описан в патенте США 5833257, в котором подробно раскрыты признаки таких приводов. В данном изобретении описаны несколько вариантов осуществления, из которых с практической точки зрения реализуемым выглядит штанговый соединительный механизм, показанный на фиг. 11, или кулачковый привод, показанный на фиг. 16. Очевидное преимущество кулачкового привода заключается в том, что при выполнении кулачкового диска соответствующей формы свойства приводных характеристик можно изменять в широком диапазоне, однако в показанном варианте осуществления кулачковый диск имеет большой размер и массу, и наличие кулачкового диска, по существу, ограничивает применимость качательного элемента в тяговом приводе. Предпочтительный и промышленно применимый вариант осуществления кулачкового привода описан на странице www.skyex.com/stringbike, на которой показаны фотографии велосипеда, представленного на международной выставке велосипедов INTERBIKE в 1999 г. в Лас-Вегасе, а также выставкеEUROBIKE в Фридрихсхафене (Германия) в 1998 г. В этом варианте осуществления приводной качательный рычаг выполнен в виде двухрычажного балансира, а внешний край кулачкового диска прижат к внешнему кольцу шарикового подшипника, прикрепленного к нижнему концу двухрычажного балансира. Изменение передаточного числа осуществляется путем перемещения шкива, направляемого вдоль другого рычага балансира. Недостатком такой конструкции является то, что прижимные усилия, прикладываемые кулачковым диском к валу двухрычажного балансира, слишком велики, что вызывает деформацию кручения рамы и приводит к необходимости использования усиленного подшипника специальной конструкции для работы при таких больших нагрузках. Еще один недостаток заключается в том, что возвратно-поступательное перемещение качательного рычага передается на тросовый барабан на заднем колесе велосипеда одним шкивом, и, когда при качательном перемещении количество витков на шкиве изменяется, усилия, действующие на качательный рычаг, содержат компоненты, действующие не только в плоскости перемещения рычага, но также в поперечном направлении, причем такая поперечная компонента вызывает изгиб качательного рычага, подшипник которого должен быть рассчитан на такой нежелательный момент. Трос, выполненный из пластмассы, не выдерживает больших изгибающих нагрузок и согласно испытаниям на долговечность выходит из строя через каждые 600-800 км эксплуатации. Еще один недостаток заключается в том, что для возвращения качательного рычага в первоначальное положение в каждом цикле качения требуется отдельный узел смещения троса, который требует существенного места на раме и тросовом барабане, что увеличивает затраты на производство. В соответствии с фиг. 11 указанного документа приводной рычаг состоит из двух элементов, образующих тупой угол друг с другом, и соединительный вал элементов содержит шариковый подшипник,который катится по внутреннему линейному углублению качательного рычага, выполненного как соединительная тяга, причем в обоих направлениях перемещения качательного рычага шариковый подшипник катится по соответствующим противоположным стенками линейного углубления. Линия симметрии соединения проходит через центр качательного перемещения. Ввиду ограничений конструкции возможность регулировки или изменения приводных характеристик отсутствует, а приводная характеристика,обеспечиваемая этим классическим штанговым приводным механизмом, существенно отличается от обеспечиваемой велосипедами с цепным приводом, в которых используются круглые звездочки. Еще один недостаток такой конструкции заключается в сложности изменения передаточного числа из-за недостатка места для линейного качательного рычага, по которому может перемещаться шкив, так чтобы его свободное перемещение не ограничивалось рамой, в частности рамой задней вилки. Сущность изобретения Несмотря на описанные выше недостатки, преимущества, связанные с приводом попеременного действия, существенны и представлены в таблице, опубликованной на указанном веб-сайте, а именно данная приводная система позволяет изменять передаточное число в любой момент, нечувствительна к загрязнению, износу и влажности, имеет высокую эффективность, так как в приводной системе используются только элементы качения. Еще одно преимущество заключается в отсутствие цепи и ограничений, связанных с наличием цепи, включая сложность снятия ведущего заднего колеса. Целью настоящего изобретения является сохранение обозначенных преимуществ приводов попере-1 021264 менного действия с одновременным устранением или существенным уменьшением их недостатков,включая обеспечение приводной кривой, очень близкой к велосипедам с цепным приводом, а также существенное уменьшение изгибающих нагрузок, действующих на вал качательного рычага и, следовательно, на раму. В соответствии со вторым аспектом изобретения предлагается приводная система, в которой трос может выдерживать изгибающую нагрузку, действующую на него из-за многократного наматывания и сматывания с тросового барабана, а также из-за колебания тяговых усилий, без опасности разрыва или повреждения. В соответствии с другим аспектом целью изобретения также является обеспечение простой регулировки передаточного числа велосипеда и под нагрузкой, и без нагрузки. Эти и другие цели изобретения достигнуты посредством конструкции привода попеременного действия, описанной в прилагаемой формуле изобретения. Изобретение относится к приводу попеременного действия, предназначенному для велосипедов и транспортных средств, приводимых в движение аналогичным велосипедам образом, содержащих раму и ведущее колесо, соединенное с возможностью вращения с рамой, причем указанный привод содержит пару узлов одинаковой конструкции с противоположными приводными направлениями, прикрепленных с противоположных сторон рамы, причем каждый указанный приводной узел содержит соответствующие качательные рычаги, шарнирно соединенные с общим качательным валом, прикрепленным к раме, и выполненные с возможностью осуществления попеременного качательного перемещения вокруг качательного вала, причем каждый качательный рычаг имеет соответствующий приводной рычаг с краем,ограничивающим приводную направляющую, причем указанные приводные узлы содержат общий приводной вал, соединенный шарнирно с указанной рамой для кругового перемещения вокруг своей оси, и каждый из указанных приводных узлов содержит соответствующий палец, ось которого, по существу,параллельна указанной оси приводного вала и который соединен с указанным общим приводным валом и вращается по соответствующей круговой траектории вокруг указанной оси приводного вала, пару приводных колес, каждое из которых соединено с возможностью вращения с указанным пальцем, причем каждое из указанных приводных колес размещено в одной из указанных приводных направляющих так,что вращение указанных приводных колес, катящихся в первом и затем в обратном втором направлении по указанной соответствующей приводной направляющей, вызывает попеременное качательное перемещение указанного качательного рычага, причем указанные приводные колеса механически соединены друг с другом и в каждом положении они сдвинуты на угол 180 относительно друг друга вокруг указанного приводного вала, пару гибких тросов, каждый из которых соединен с соответствующим одним из указанных качательных рычагов, и соответствующие смещенные тросовые барабаны, закрепленные на валу указанного ведущего колеса и соединенные с ведущим колесом с обеспечением передачи момента вращения на указанное колесо от указанного тросового барабана в одном, но взаимно противоположном направлении вращения, причем каждый из указанных тросов соединен и намотан с заданным количеством витков на соответствующий тросовый барабан так, что при работе привода количество указанных витков изменяется взаимно попеременно. Привод попеременного действия в соответствии с изобретением может использоваться для велосипедов и предпочтительно может использоваться в трехколесных велосипедах или специальных велосипедах. Возможность простого изменения передаточного числа позволяет использовать изобретение в маленьких транспортных средствах, приводимых в движение электрическими или традиционными двигателями малой мощности. Высокого пускового момента особенно сложно достичь при использовании электрических двигателей, так как электродвигатель, рассчитанный на данную мощность, имеет маленький пусковой момент, так как номинальная мощность достигается только на более высоких частотах вращения. В таких случаях использование предлагаемого привода может стать идеальным решением. Если вращение осуществляется не приводным рычагом, перемещаемым человеком, необходимо обеспечить лишь вращение приводного колеса вокруг приводного вала. Перечень чертежей Далее приведено описание привода попеременного действия вместе с предпочтительными вариантами осуществления и со ссылкой на сопроводительные чертежи, на которых: фиг. 1 представляет собой местный вид велосипеда, снабженного приводом; фиг. 2 представляет собой вид в аксонометрии велосипеда, показанного на фиг. 1; фиг. 3 представляет собой вид в аксонометрии качательного рычага, на котором некоторые элементы велосипеда не показаны; фиг. 4 представляет собой схематичный разрез, на котором показано соединение приводного колеса и приводного рычага; фиг. 5 представляет собой разрез, подобный разрезу, показанному на фиг. 4, в другом варианте осуществления; фиг. 6 представляет собой вид сбоку варианта осуществления качательного рычага; фиг. 7 представляет собой упрощенную схему в аксонометрии, на которой показана траектория тросовых ветвей; фиг. 8 представляет собой схему, на которой показана конструкция качательного рычага, расположение шкивов и узел для изменения передаточного числа; фиг. 9 представляет собой схему, на которой показана направляющая боуденовских тросов, управляющих изменением передаточного числа; фиг. 10 представляет собой кинематические схемы, на которых показан привод при разных приводных направляющих и в разных фазах качательного перемещения; фиг. 11 представляет собой оптимальную приводную направляющую и ее свойства; фиг. 12 представляет собой график зависимости угловой скорости приводного рычага от углового положения приводного рычага для трех разных форм приводной направляющей; фиг. 13 представляет собой графики зависимости углового смещения от передаточного коэффициента левого и правого приводных узлов без учета их взаимодействия; фиг. 14 представляет собой график, подобный графику на фиг. 13, на котором показаны взаимодействия двух сторон и усилия в соответствующих тросовых ветвях; фиг. 15 представляет собой еще один вариант осуществления качательного рычага, на котором показаны определенные характерные углы качательного рычага; фиг. 16 представляет собой вид сбоку качательного рычага, на котором также показана направляющая управляющих боуденовских тросов; фиг. 17 представляет собой местные виды в разрезе узла, с помощью которого можно регулировать различные передаточные числа для разных сторон; фиг. 18 представляет собой три схемы качательного балансира, используемого для соединения приводного троса с рамой. Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 и 2 показаны местный вид и вид в аксонометрии велосипеда, снабженного приводом, в котором используются качательные рычаги в соответствии с настоящим изобретением. Кроме указанной используемой приводной системы, велосипед снабжен традиционными частями или узлами, которые содержат жесткую раму 1, выполненную из трубчатых элементов, которая имеет соответствующую первую и заднюю вилку для крепления колес, при этом в торцевой области задней вилки выполнены соответствующие углубления или гнезда для крепежных концов вала 3 заднего колеса 2. Первая вилка и первое колесо не показаны на чертеже, так как первое колесо не имеет привода. Рама 1 содержит рамные трубы, проходящие и расходящиеся снизу предпочтительно V-образно по направлению соответственно к рулю и седлу, указанные трубы соединены друг с другом нижними концами, и в этой соединительной области выполнен нижний полый соединительный элемент, конструкция которого отличается от соединительной области традиционных велосипедов. Разница заключается в том,что в предлагаемой конструкции выполнена не только втулка, имеющая ось, перпендикулярную плоскости рамы, и выполненная с возможностью крепления с возможностью вращения приводного вала 4, соединяющего соответствующие приводные рычаги 5, 6, расположенные с левой и правой сторон велосипеда, но соединительный элемент снабжен также второй втулкой, расположенной ниже и смещенной в направлении назад, предназначенной для крепления и обеспечения опоры с возможностью вращения соответствующих качательных рычагов 10, 10', также расположенных на соответствующих сторонах велосипеда, которые могут поворачиваться вокруг указанного вала независимо друг от друга. В поперечном направлении приводной вал 4 проходит через первую втулку, входя и выходя из нее,причем указанная втулка обеспечивает валу осевую опору, а соответствующие концы вала жестко соединены с соответствующими концами приводных рычагов 5 и 6, конструкция которых отличается от конструкции традиционных педальных рычагов. Форма приводных рычагов 5 и 6 одинакова, а положение рычагов таково, что рычаги повернуты на 180 относительно друг друга. Каждый из приводных рычагов 5, 6 содержит соответствующую пару хвостовиков 7, 8 и 7', 8', которые образуют тупой угол друг с другом в паре, причем соответствующие хвостовики жестко соединены друг с другом посредством соответствующих поперечных пальцев 9, 9' (палец 9 показан на фиг. 2). Хвостовики 7 и 8 образуют друг с другом угол приблизительно от 100 до 120, предпочтительно 110. Внутренний хвостовик 7, который относится к приводному рычагу 6 с левой стороны велосипеда, сдвинут на 180 относительно внутреннего хвостовика 7' приводного рычага 5 с правой стороны велосипеда, а внешний хвостовик 8 проходит параллельно внешнему хвостовику 8' с другой стороны, но в противоположном направлении, так что приводные рычаги 5 и 6 с левой и правой сторон всегда находятся в противоположных положениях, как и в традиционных велосипедах (см. фиг. 1). С целью обеспечения единства обозначений соответствующие элементы с левой и правой сторон велосипеда обозначены таким образом, что ссылочные номера позиций элементов с левой стороны имеют символ ('). Центральные оси внутреннего и внешнего хвостовиков 7, 8 лежат в разных плоскостях, и эти плоскости расположены в перпендикулярном направлении. Расстояние между осями определено длинной пальца 9. Соответствующие приводные колеса 15 (и 15' с другой стороны) прикреплены и посажены на пальцы 9, 9', которые предназначены для передачи усилия (момента), прикладываемого велосипедистом к приводным рычагам 5 и 6, на соответствующие качательные рычаги 10, 10'. На фиг. 3 показаны два качательных рычага 10, 10', качательный вал 11, который соединяет кача-3 021264 тельные рычаги 10, 10' вместе, два приводных колеса 15, 15', которые перемещают качательные рычаги 10, 10' и шкивы 26 а, 26b и 26 а', 26b', которые входят в контакт с возможностью скольжения с качательными рычагами 10, 10' как отдельный узел, при этом остальные части велосипеда не показаны. Качательные рычаги 10, 10' соединены друг с другом посредством качательного вала 11, проходящего с возможностью попеременного вращательного перемещения в указанной выше второй или вспомогательной втулке, так что с обеих торцевых областей качательного вала 11 расположены соответствующие подшипники 12, 12', которые имеют внешние кольца, установленные в соответствующих гнездах, выполненных во внутренних частях качательных рычагов 10, 10'. Внешние части подшипников 12, 12' закрыты соответствующими пылезащитными заглушками 13, 13'. Приводные рычаги 5 и 6 с левой и правой сторон велосипеда образуют единый жесткий узел, причем качательные рычаги 10 и 10' лишь связаны друг с другом и могут свободно вращаться относительно друг друга вокруг качательного вала 11. Качательные рычаги 10, 10' имеют приближенную к треугольной форму и имеют большое отверстие в центре, а их основные составные части включают внутреннюю головную часть 14, 14', которая имеет изогнутую форму и ограничивает гнезда, в которые плотно посажены соответствующие внешние кольца подшипников 12, 12'. От головной части 14 в направлении наружу отходят два расходящихся рычага, которые образовывают друг с другом острый угол, причем передние рычаги (расположенные ближе всего к первому колесу) служат в качества приводных рычагов 16, 16', а задние рычаги (расположенные ближе всего к заднему колесу) служат в качестве тяговых рычагов 17, 17'. Приводные рычаги 16, 16' ограничивают соответствующие одинаковые приводные направляющие 18, 18', а тяговые рычаги 17, 17' ограничивают соответствующие одинаковые тяговые направляющие 19, 19'. Торцевые области обоих приводных рычагов 16, 16' и тяговых рычагов 17, 17', которые находятся дальше всего от головной части 14, 14', соединены соответствующими соединительными рычагами 20, 20', которые обеспечивают жесткость и несущую способность. В самом простом варианте соединительные рычаги 20, 20' могут быть выполнены из цельной пластины, но с учетом того, что нагрузка прикладывается только в прямом направлении качательного перемещения, соединительные рычаги 20, 20' также могут быть шарнирно соединены с соседними рычагами. Качательные рычаги 10, 10' могут быть выполнены из цельного листового материала, но с целью обеспечения достаточной жесткости и экономии материалов каждый рычаг предпочтительно выполнен из пары расположенных на расстоянии друг от друга металлических пластин одинаковой формы, в качестве которых может быть использована пластина из нержавеющей стали, причем указанные пластины соединены с образованием цельного узла. Зазор или расстояние между пластинами может использоваться для размещения определенных конструктивных элементов. На фиг. 6 показана конструкция такого предпочтительного элемента 21 качательного рычага. Разница с фиг. 3 заключается в том, что в этом варианте осуществления приводной рычаг 16, тяговый рычаг 17 и соединительный рычаг 20 имеют жесткую конструкцию, которая обеспечивает хорошую несущую способность и имеет малый вес. На фиг. 6 показано отверстие 22, выполненное в головной части 14, в котором размещено внешнее кольцо подшипника 12. Элемент 21 качательного рычага 21 поворачивается и качается вокруг центра отверстия 22, являющегося центром вращения 23. На фиг. 6 показано множество маленьких отверстий 24, которые вместе с проходящими через них пальцами соединяют элемент 21 качательного рычага с другим расположенным на расстоянии элементом 21b качательного рычага за ним (этот второй элемент не виден на фиг. 6, но виден на фиг. 5 и 16). Расстояние между элементами 21 и 21 а, 21' и 21b' качательного рычага предпочтительно может составлять от 1,5 до 3 мм, и указанные элементы могут быть выполнены из пластин нержавеющей закаленной стали толщиной от 2 до 2,5 мм. Для понимания перемещения качательных рычагов 10, 10' необходимо сравнить фиг. 1 и 2 с фиг. 3,на которых видно, что приводные колеса 15, 15' вращаются и закреплены на пальцах 9, 9', которые соединяют хвостовики 7, 8 приводных рычагов 5, 6, и указанные приводные колеса 15, 15' входят в контакт с направляющими 18, 18' приводных рычагов 16, 16' и катятся по ним. На фиг. 4 и 5 показаны разрезы по нормали к плоскости приводного рычага 16 качательного рычага 10, на которых показано вхождение приводного колеса 15 в контакт с приводным рычагом 16. На фиг. 4 показан вариант осуществления, в котором качательный рычаг 10 выполнен из цельной толстой пластины. В этом случае край приводного рычага 16 качательного рычага 10, который направлен к приводному колесу, ограничивает углубление. Фиг. 5 соответствует варианту осуществления, показанному на фиг. 6, за исключением того, что качательный рычаг 10 содержит пару расположенных на расстоянии друг от друга и соединенных элементов 21 а и 21b качательного рычага. В этом варианте осуществления расстояние между указанными элементами образует углубление 25, необходимость выполнения которого на отдельном этапе изготовления отсутствует. На фиг. 4 и 5 видно, что край приводного колеса 15 содержит выступ 36, который проходит от края и входит в углубление 25. Выступ 36 обеспечивает устойчивое положение и направляет приводное колесо 15 в направлении, перпендикулярном плоскости чертежа. При вращении приводных рычагов 5, 6 приводное колесо 15 перемещается по круговой траектории вокруг центральной линии приводного вала 4 и это круговое перемещение определяет качательное перемещение качательного рычага 10 вокруг центра вращения 23, как будет описано ниже. Перед этим следует обратиться к фиг. 3, на которой показаны соответствующие направляющие шкивов 26 а, 26b и 26 а', 26b', расположенных напротив (то есть по направлению к переднему колесу велосипеда) тяговых рычагов 17, 17', причем валы указанных шкивов входят в контакт с одной из соответствующих тяговых направляющих 19, 19'. Указанные шкивы имеют соответствующие соединительные валы 35, 35' (эти валы 35, 35' закрыты и не показаны на фиг. 3, но показаны на фиг. 8 и 16), которые имеют соответствующие оси вращения 27, 27'. При возвратнопоступательном качательном перемещении качательные рычаги 10, 10' передают приводное усилие через тросы, проходящие через указанные шкивы 26 а, 26b и 26 а', 26b', на заднее колесо 2. На фиг. 7 показана упрощенная схема привода заднего колеса 2 велосипеда, начинающегося со шкивов 26 а, 26b слева. Так как предлагаемый в изобретении привод может одинаково использоваться и с левой, и с правой стороны велосипеда, схема, показанная на фиг. 7, также может применяться в приводе с другой стороны, но мгновенные положения с левой и правой сторон всегда противоположны. На валу 3 заднего колеса 2 расположен тросовый барабан 61, также показанный на фиг. 2. Оба конца 29 а и 29b троса 28 прикреплены к тросовому барабану 61. К тросу 38 прикладывается только тяговое усилие. Внутри тросового барабана 61 расположена спиральная пружина 33, которая обеспечивает постоянный сдвиг троса 28 и обратное перемещение качательной системы. С другой стороны велосипеда установлен такой же узел с тросовым барабаном 61'. На концах 29 а и 29b тросов выполнено заданное количество витков вокруг барабана 61 с образованием соответствующих обмоток. При движении велосипеда количество витков изменяется, так как трос циклически наматывается и разматывается. Максимальное количество витков составляет от 4 до 5. Направление двух соседних обмоток противоположное, поэтому любое угловое смещение тросового барабана 61 вызывает смещение на ту же величину тросовых ветвей 28 а, 28b,сбегающих с соответствующих обмоток. Поперечная составляющая смещения троса симметрична относительно центральной плоскости двух обмоток, благодаря чему направление приложения результирующего усилия, получаемого из усилий двух тросовых ветвей 28 а, 28b, всегда лежит в центральной плоскости, которая расположена посередине между шкивами 26 а и 26b. Две тросовые ветви 28 а и 28b проведены через соответствующие шкивы 26 а, 26b и далее проходят в обратном направлении и соединены на балансировочном шкиве 30. Балансировочный шкив 30 имеет подшипник с вертикальным валом, удерживаемым шарнирным опорным элементом 31, прикрепленным к центральной области задней вилки. Благодаря шарнирному креплению опорного элемента 31, плоскость балансировочного шкива 30 всегда лежит в плоскости тросов, сбегающих со шкивов 26 а, 26b, всегда в направлении по касательной, тем самым на балансировочный шкив 30 могут действовать только качательныетяговые усилия. Шарнирный опорный элемент 30 также может быть выполнен, как показано на фиг. 18 а-18 с, что обеспечивает быстрое и легкое снятие приводного троса. В этой конструкции к центральной части задней вилки велосипеда приварена проушина 71, которая удерживает вал 72, к которому шарнирно прикреплена кулиса 73,удерживающая неподвижный вал 75. К неподвижному валу 75 с небольшим свободным ходом шарнирно прикреплен и соединен балансировочный шкив 30. На кромке балансировочного шкива 30 выполнено углубление 77. Кулиса 73 содержит выступ 76, который выступает к кромке балансировочного шкива 30. Балансировочный шкив обхвачен приводным тросом 28, и при работе привода велосипеда трос 28 имеет лишь небольшое смещение. Как правило, углубление 77 расположено в направлении назад, как показано на фиг. 18b, и выступ 76 предотвращает случайный или вызванный натяжением троса 28 сход приводного троса 28 (при утрате натяжения) с балансировочного шкива 30. На фиг. 18 с показан балансировочный шкив 30, повернутый на пол-оборота относительно положения, показанного на фиг. 18b, при этом такое положение может использоваться для намеренного снятия троса 28. Расстояние, образованное между выступом 76 и краем углубления 77, больше диаметра троса 28, при этом трос 28 можно отвести и снять путем натяжения в направлении, противоположном смещающему усилию спиральной пружины 33 (расположенной в тросовом барабане 61), снятия со шкивов 26 а, 26b и последующего перемещения через зазор, образованный между выступом 76 и углублением 77, и, наконец, сматывания с тросового барабана 61. Благодаря тому что в поперечном направлении оба шкива 26 а и 26b расположены симметрично с обеих сторон тягового рычага 17 качательного рычага 10, усилия, прикладываемые на соответствующие тросовые ветви 28 а и 28b, всегда прикладываются симметрично к тяговому рычагу 17, поэтому возникают только силы в плоскости тягового рычага, то есть вертикальной плоскости, и, таким образом, не возникает поперечных сил. Эта симметричность обеспечивается противоположным направлением обмоток тросовых ветвей на тросовом барабане 61, благодаря чему поперечная компонента тросовых ветвей, сбегающих с обмоток или набегающих на них, всегда симметрична плоскости качательного рычага 10. Положение шарнирного опорного элемента 31 должно быть выбрано таким образом, чтобы ось балансировочного шкива 31 лежала в центральной плоскости качательного рычага 10. Траектория троса, показанная на фиг. 7, обеспечивает не только симметричность, благодаря которой нагрузки всегда прикладывается в центральной плоскости качательного рычага, но также равномерное распределение нагрузки между тросовыми ветвями. Когда качательный рычаг 10 осуществляет возвратно-поступательное перемещение вперед и назад вокруг центра вращения 23, трос 28 осуществляет возвратно-поступательное перемещение в общей касательной плоскости, ограниченной плоскостью тросового барабана 61 и плоскостью двух шкивов 26 а и 26b, как показано двойной стрелкой 32 на фиг. 7. В показанной системе любое смещение общего вала двух шкивов 26 а и 26b в направлении троса 28 вызы-5 021264 вает двукратное смещение по периметру тросового барабана 61. Когда тяговая направляющая 19 качательного рычага 10 прикладывает усилие F к общему валу двух шкивов 26 а и 26b, к отдельным тросовым ветвям 28 а и 28b прикладывается лишь усилие F/4. Трос 28 предпочтительно может быть выполнен из многожильной скрученной пластмассы высокой плотности, например полиамидных волокон, широко используемых в мореходстве, причем трос должен иметь диаметр приблизительно от 2 до 3,5 мм, а предпочтительно от 2,5 до 3 мм, и иметь высокую прочность, малую растягиваемость и возможность многократно и значительно изгибаться. Благодаря уменьшению усилий в тросовых ветвях до четверти от полного усилия можно также уменьшить требуемый диаметр троса. Гибкость тросов, в частности радиус изгиба и количество допустимых циклов изгиба, повышается с уменьшением диаметра, поэтому использование тросов меньшего диаметра повышает гибкость. Диаметр шкивов 26 а и 26b должен подбираться в соответствии с радиусом изгиба троса при заданной нагрузке, и в приведенном примере при использовании троса диаметром 4 мм шкив диаметром 30-40 мм достаточен. Диаметр тросового барабана 61 зависит от диаметра изгиба троса (который определяет нижнюю границу диаметра), но также зависит от заданного передаточного числа и некоторых других соображений. При указанных выше размерах и диаметрах было проведено испытание на долговечность на испытательном стенде, моделирующем номинальную нагрузку, при этом трос 28 сохранил целостность и нагрузочную способность в течение 15000 км испытаний, несмотря на то, что трос подвергался существенной изгибающей нагрузке, так как за каждый период качания трос один раз наматывался и сматывался с тросового барабана. Балансировочный шкив 30 предназначен для обеспечения равенства нагрузки в соответствующих тросовых ветвях. В частности, при возникновении внезапных нагрузок из-за эластичности троса ветвь,подвергающаяся большему тяговому усилию, подвергается большей нагрузке, однако из-за разницы усилий балансировочный шкив 30 может немного провернуться, что уравновесит нагрузку между двумя тросовыми ветвями. Очевидно, что при вращении приводных валов приводные колеса 15, 15' вращаются по соответствующим круговым траекториям и приводные рычаги 16, 16' могут подвергаться воздействию только направленных вперед усилий, действующих на приводные направляющие 18, 18', поэтому, когда приводные колеса 15, 15' перемещаются в направлении назад, необходимо принять специальные меры для реверсирования направления качания качательных рычагов 10, 10' и обеспечения повторения приводным рычагом 16, 16' перемещения приводных колес 15, 15' в направлении назад. Существует несколько способов обеспечения этого перемещения в направлении назад. В иллюстративных вариантах осуществления такое перемещение обеспечивается спиральной пружиной 33, показанной лишь схематично на фиг. 7, которая расположена в полой внутренней части тросового барабана 61, сжимается и деформируется при вращении тросового барабана 61 в прямом направлении и запасает энергию, при этом указанное смещающее усилие создает тяговое или смещающее усилие в направлении назад к тяговой направляющей, составляющее приблизительно от 20 до 50 Н, причем, когда качательные рычаги 10, 10' остаются в покое, указанное смещающее усилие перемещает качательные рычаги 10, 10' назад. Конструкция спиральной пружины 33 обеспечивает возможность достаточного смещения троса 28 даже без нагрузки и при этом ограничивает смещающее усилие, когда качательный рычаг 10 или 10' находится в крайнем переднем положении. Периодическое сжатие и распрямление спиральной пружины 33 не вызывает потерь энергии, так как запасаемая в пружине энергия в значительной степени используется при распрямлении пружины. Такая система тросового смещения имеет, однако, интересную особенность - при отсутствии нагрузки система стремится перейти в состояние с минимумом энергии. В отличие от традиционных велосипедов, в которых педали сохраняют положение, которое им задал велосипедист, в предлагаемой системе после оставления велосипеда смещающее усилие всегда перемещает педали в одинаковое положение с левой и правой сторон в зависимости от того, левая или правая педаль находилась в нижнем положении в момент оставления. Параметры системы можно подобрать таким образом, чтобы это первоначальное положение педали соответствовало оптимальному углу (углу стрелки на циферблате, указывающей приблизительно на 8 или 9 ч), позволяющему опереть велосипед, когда педаль находится в переднем и верхнем положении со стороны, на которую велосипедисту необходимо опереть велосипед. В описанном приводе, как показано на фиг. 3, шкивы 26 а, 26b и 26 а', 26b' расположены в центральной части тяговой направляющей 19, 19'. Изменение передаточного числа может быть выполнено путем перемещения шкивов вверх и вниз по тяговой направляющей 19, 19'. При этом на фиг. 7 такое перемещение осуществляется путем смещения оси вращения 27 шкивов 26 а, 26b вдоль тяговой направляющей. Эта направляющая показана на фиг. 7 двойной стрелкой 34, которая представляет собой смещение, выполняемое для изменения передаточного числа. В то же время при качательном перемещении та же ось вращения 27 также осуществляет возвратно-поступательное перемещение по изогнутой стрелке 34 а. Направление этого возвратно-поступательного перемещения различно при различных значениях передаточного числа. Однако это не оказывает существенного влияния на предлагаемую приводную систему,так как ось балансировочного шкива 30 всегда может повторять такое угловое перемещение благодаря тому, что указанная ось может изменять свой угол наклона при повороте опорного элемента 31. Следует отметить, что качательное перемещение тягового рычага 17 может передаваться на тросовый барабан на заднем колесе несколькими другими способами, например при использовании двух вет-6 021264 вей, когда вместо использования троса с четырьмя ветвями используется достаточно прочный трос. В таком случае в плоскости качательного рычага должен быть расположен один шкив и должно быть предотвращено воздействие нежелательной существенной поперечной компоненты на качательный рычаг при наматывании и разматывании троса на барабан. Также можно использовать несколько других способов смещения и натяжения троса, однако описанная конструкция имеет несколько преимуществ (например, уменьшение нагрузки, действующей на отдельные тросовые ветви, уравновешивание усилий ветвей,увеличение гибкости благодаря использованию более тонкого троса и, наконец, то, что результирующие усилия троса всегда лежат в центральной плоскости качательного рычага 10). На фиг. 8 показано, в том числе, изменение передаточного числа. На данном чертеже показан качательный рычаг 10, состоящий из двух пластин, в поперечном разрезе в центральной плоскости зазора между пластинами, и с целью упрощения описания также показаны ссылочные номера позиций. Для установки требуемого передаточного числа (передачи) важно понимать, как изменяется положение шкивов 26 а и 26b вдоль тяговой направляющей 19, ограниченной передним краем тягового рычага 17. На фиг. 8 показан шкив 26b и вал 35 в разрезе, который соединяет шкив 26b с другим шкивом 26 а, который расположен над плоскостью чертежа и поэтому не виден. Шкивы 26 а и 26b могут свободно вращаться вокруг вала 35 благодаря шариковым подшипникам 52 и 52b, показанным на поперечном разрезе на фиг. 16. В варианте осуществления, показанном на фиг. 8, поверхность тяговой направляющей 19 снабжена несколькими отдельными дугообразными углублениями 37, которые служат для временной фиксации положения вала 35 путем создания плотного контакта между валом 35 и частью подобного ему углубления. В верхней торцевой части тягового рычага 17, расположенной близко к соединительному рычагу 20, расположен шкив, длина которого достаточно мала для того, чтобы размещаться в узком зазоре между двумя элементами 21 а и 21b качательного рычага (см. фиг. 16), а вал шкива закреплен в соответствующих противоположных отверстиях, выполненных в элементах качательного рычага. В варианте осуществления, показанном на фиг. 8, в нижней части тягового рычага выполнены соответствующие направляющие каналы для размещения соответствующих боуденовских тросов 39 и 40. Внешняя оболочка боуденовского троса 39 закреплена глубоко в соответствующем канале под нижним концом тяговой направляющей, а внутренний трос проведен к валу 35 и прикреплен к нему. Оболочка другого боуденовского троса 40 также закреплена в другом канале, а соответствующий внутренний трос выходит вдоль зазора между двумя элементами 21 а, 21b качательного рычага, проходит вокруг шкива и проходит далее вниз до вала 35, к которому он прикреплен. Когда трос 39 натягивается и обеспечивается перемещение другого троса 40 под действием натяжения, то тяговое усилие, действующее в направлении тяговой направляющей,воздействует на вал 35 и вызывает его перемещение вместе с двумя прикрепленными шкивами 26 а и 26b в направлении внутрь, то есть к центру вращения 23. В обратном случае, когда натягивается трос 40 и обеспечивается перемещение другого троса 39, то на вал 35 воздействует противоположное усилие, приложенное в направлении тяговой направляющей 19 и обеспечивающее перемещение вала 35 во внешнем направлении к шкиву 38. Однако шкивы 26 а и 26b могут перемещаться по тяговой натравляющей 19, только когда качательный рычаг 10 и соответствующий тяговый рычаг 17 качаются в направлении назад, то есть когда усилие контакта между валом 35 и соответствующим углублением 37 в тяговой направляющей относительно мало, так как оно обеспечивается только смещающим усилием троса 38. В таких условиях усилие, действующее в направлении тяговой направляющей 19, достаточно для извлечения вала из соответствующего углубления 37, перемещения на один шаг вперед и фиксации в следующем из серии углублений, а когда тяговое усилие продолжает действовать, вал продолжает последовательно перемещаться до тех пор, пока сохраняется натяжение троса. Вращение вала 35 облегчается, если тросы 39 и 40 прикреплены к валу посредством подшипника 53, как показано на фиг. 16. Профиль углублений 37 (в частности, восходящих верхних частей) круглый, а высота (или глубина) углублений 37 выбрана таким образом, чтобы при качательном перемещении вал 35 сохранял свое положение на тяговой направляющей 19, несмотря на постоянно меняющиеся нагрузки, действующие на него, причем величина усилий существенно колеблется,а направление указанных усилий также меняется, но в меньших диапазонах. Смещение вдоль тяговой направляющей 19, которая также служит в качестве направляющей изменения передачи, возможно,только если вал 35 прижимается к данному углублению лишь с относительно небольшим усилием, обеспечиваемым смещающим натяжением троса. Это условие может выполняться в нескольких случаях. Первый из указанных случаев представляет собой качательное перемещение качательного рычага в направлении назад, происходящее в любой из сторон велосипеда при каждом обороте приводного вала 4. Указанное условие также выполняется, когда велосипед стоит (не перемещается) или когда велосипедист не поворачивает приводной вал (педали). Когда велосипедист едет на велосипеде с усилием, тяговый рычаг 17 активного в данный момент качательного рычага поворачивается в прямом направлении, и усилие этого прямого смещения проталкивает вал 35 в соответствующий выступ 37, и в этих условиях усилие перемещения, которое может прикладываться тросами 39 или 40, недостаточно для нарушения плотного соединения между углублением 37 и прижатым к нему валом 35. Предлагаемая в изобретении конструкция обеспечивает изменение передаточного числа (передачи) только в том случае, когда велосипедом управляют с достаточным усилием. Далее со ссылкой на фиг. 9 приведено подробное объяснение. Как описано выше, два боуденовских троса 39, 40 проведены к качательному рычагу 10 с левой стороны велосипеда. На виде в аксонометрии на фиг. 2 видно, что рама 1 имеет задний практически вертикальный стержень, которые удерживает нижний опорный элемент 41 и верхний опорный элемент 42, которые проходят горизонтально в направлении назад из стержня и расположены на заданном расстоянии друг от друга. Нижний опорный элемент 41 удерживает верхние концы боуденовских тросов 39, 39' и 40, 40', которые проведены к задним левым качательным рычагам 10, 10' соответственно. Верхний опорный элемент 42 вмещает только нижние концы двух других боуденовских тросов 43 и 44. Другие концы тросов 43, 44 проходят к ручному механизму изменения скорости, расположенному на рулевой рукоятке велосипеда, и соединены с ним, причем указанный механизм в настоящем документе не описан. При повороте механизма изменения скорости в первое положение на боуденовский трос 43 воздействует тяговое усилие, а другой трос 44 отпускается в той же степени, а при изменении направления поворотного перемещения тросы 43 и 44 меняются местами. На фиг. 9 показан только один из возможных вариантов смещения, когда тяговое усилие приложено к тросу 43, прикрепленному к верхнему опорному элементу 43, относительно первоначального положения равновесия (схема A первоначальное положение, схемы B и C - положение натяжения). Когда под действием тягового усилия шкивы 26 а, 26b сместились по тяговой направляющей 19, трос 43 занимает новое положение (схема D). Трос 43 соединен с центральной частью двухрычажного балансира 45, а концы двух рычагов соединены с верхним концом троса 39, который проходит от качательного рычага 10 с левой стороны велосипеда, и с верхним концом троса 39', который проходит от качательного рычага 10' с правой стороны велосипеда соответственно. На фиг. 9 не показано, что другой боуденовский трос 44 механизма изменения скорости соединен посредством еще одного такого же качательного балансира с соответствующими концами тросов 40 и 40'. При работе указанные боуденовские тросы находятся в заданном смещенном состоянии. На схеме А на фиг. 9 показано первоначальное положение, когда с левой и правой сторон два вала 35 и 35' входят в контакт с соответствующими углублениями 37, 37' тяговых направляющих 19, 19'. Предположим, что велосипедист едет по склону в гору и хочет увеличить передаточное число, то есть намеревается уменьшить угловое смещение ведущего колеса при данном повороте педалей. Путем поворота механизма изменения скорости на рукоятке в соответствующем направлении трос 43 может быть натянут, что обеспечит натяжение центральной точки качательного балансира 45 в направлении вверх. При этом качательный рычаг 10 находится под нагрузкой, так как он перемещается вперед при движении велосипеда, и при таком перемещении вперед под нагрузкой вал 35 прижимается к соответствующему углублению 37. Усилие между валом 35 и углублением 37 не позволяет валу 35 перемещаться по тяговой направляющей, несмотря на тяговое усилие, приложенное к тросу 39, поэтому смещение с левой стороны отсутствует. При перемещении левого качательного рычага 10 вперед и натяжении троса, когда направление качательного перемещения другого качательного рычага 10' с правой стороны изменяется, этот качательный рычаг оттягивается назад под действием смещения тросовой ветви 38'. Величина этого смещающего усилия по амплитуде меньше тягового усилия при полной нагрузке, поэтому направленное вверх тяговое усилие, действующее на качательный балансир 45, может переместить правый рычаг вверх, то есть трос 39', проходящий к правому качательному рычагу 10', переместится вверх. Тяговое усилие этого троса 39' с левой стороны может извлечь правый вал 35' из соответствующего углубления 37 и переместить данный вал по тяговой направляющей 19' вниз на один или два шага, причем качательный балансир 45 займет асимметричное положение, показанное на схеме B на фиг. 9. Трос 43 все еще находится под действием сдвигающего усилия. При движении велосипеда вперед роли и направления перемещения качательных рычагов 10 и 10' вскоре вновь изменятся, и когда вал 35' с левой стороны войдет в контакт с соответствующим новым углублением 37', то приводное усилие временно зафиксирует это новое положение, находящееся ближе к центру вращения 23. Затем другой качательный рычаг 10 с левой стороны начнет перемещаться назад и вал 35 сможет выйти из соответствующего углубления 37 и переместиться в направлении вниз, при этом положения будут соответствовать показанным на схеме C на фиг. 9, а левый вал будет ближе к центру вращения. Окончательное положение (покоя), показанное на схеме D, достигается, когда велосипедиста устраивает мгновенное передаточное число и он больше не поворачивает и не смещает трос 43. Велосипедист фактически не почувствует того, что передаточное число изменено дискретными шагами, так как при передаче нагрузки на заданную новую сторону положение соответствующего вала уже изменилось, а когда нагрузка сдвинется на другую сторону, то эта другая сторона также будет находиться в новом положении. При повороте механизма изменения скорости на рукоятке в другом направлении получается противоположная ситуация и валы 35, 35' перемещаются от центра вращения, то есть в направлении вверх. Изменение скорости указанным образом может осуществляться даже в нагруженном состоянии, например когда велосипед поднимается в гору, благодаря возможности осуществления перемещения в попеременных ненагруженных сторонах. Кроме того,изменение скорости может осуществляться, когда велосипед неподвижен или ненагружен, при этом в состоянии без нагрузки для изменения скорости поворот педалей не требуется совсем. То, как тросы 39, 40 фактически проведены в качательный рычаг 10, еще не было подробно описано, но очевидно, что тросы должны достигать качательного рычага 10 с минимальными или небольшими изменениями в направлении, и не допускаются резкие повороты. Правильное расположение тросов пока-8 021264 зано на фиг. 16. На фиг. 16 показан предпочтительный способ проведения боуденовского троса 39 между качательным балансиром 45 и качательным рычагом 10. С целью предотвращения излома боуденовского троса 39 или воздействия нежелательных изгибающих нагрузок, вызванных непрерывным попеременным качательным перемещением качательного рычага 10, предпочтительно, чтобы трос 39 был проведен по дугообразной траектории с большим радиусом к качательному рычагу 10, как показано с внутренней стороны. В этом аспекте предпочтительно, чтобы качательный рычаг 10 содержал пару расположенных на расстоянии друг от друга элементов 21 а, 21b качательного рычага, как описано ниже, так как трос 39(и другой трос 40, не показанный на этом чертеже) может быть проведен в зазоре, ограниченном указанными элементами. Для приема боуденовских тросов 39, 40 в качательном рычаге могут быть выполнены соответствующие каналы или гнезда, как показано на фиг. 8, причем один из тросов соединен непосредственно, а другой через шкив 38 с валом 35. Как показано на фиг. 16, в отличие от фиг. 8, проведение тросов в направлении, по существу, перпендикулярном качательному рычагу, более предпочтительно,так как обеспечивает U-образное проведение троса, причем два рычага U-образной формы могут быть расположены под углом друг к другу. Со ссылкой на фиг. 9 выше описано, что попеременное переключение скоростей требует определенного смещения двух тросов 39, 40. Во многих случаях гибкое смещение является характерной особенностью длинных боуденовских тросов, но эта особенность может быть улучшена путем создания специальной гибкой в продольном направлении оболочки для боуденовских тросов в относительно короткой части между нижним опорным элементом 41 и приемным каналом в качательном рычаге 10, так чтобы можно было регулировать или нагружать пружиной механическое натяжение оболочки. С этой целью боуденовский трос 39 имеет оболочку 54, образованную спиральной пружиной. Дополнительное описание переключения и регулировки передаточного числа приведено в другой части настоящего документа. С точки зрения работы привода попеременного действия с предлагаемыми качательными рычагами большое значение имеет то, как и с какими характеристиками поворот приводных рычагов 5, 6 приводит к вращению заднего колеса. На фиг. 1 видно, что при перемещении приводные рычаги 5, 6 вращаются по круговой траектории, проходящей вокруг приводного вала 4, являющегося осью вращения, и с левой и правой сторон соответствующие приводные колеса 15 и 15' также вращаются вокруг той же оси. Эти вращающиеся приводные колеса 15, 15' катятся по задним краям приводных рычагов 16, 16' качательных рычагов 10, 10', и указанные края образуют соответствующие приводные направляющие 18, 18', в результате этого принудительного перемещения качательные рычаги 10, 10' осуществляют возвратнопоступательное качательное перемещение вокруг центра 23 вращения. На кинематических схемах на фиг. 10 а-10g показаны специальные и характерные положения качательного перемещения. На схемах на фиг. 10 показаны только те элементы, которые имеют значение в кинематике перемещения, поэтому показана приводная направляющая 18 и схематично приводное колесо 15 с центром на оси приводного вала 4, а также показан центр 23 вращения качательного перемещения. Приводная направляющая 18 с левой стороны велосипеда показана сплошной линией, а приводная направляющая 18' с противоположной стороны показана пунктирной линией. В верхней части схем двойная штрихпунктирная линия обозначает мгновенное направление перемещения приводной направляющей 18, обозначенной сплошной линией и соединенной с качательным рычагом 10. На схемах соответствующие круговые траектории показаны штрихпунктирной линией, которая обозначает траекторию перемещения центральной точки приводного колеса 15. При этом вращение осуществляется в направлении против часовой стрелки. То же направление вращения применимо к приводной направляющей с правой стороны при обозначении посредством проекции с левой стороны. Схемы 10 а и 10b относятся к уровню техники, причем приводная направляющая 18 прямая, а ее удлинение пересекает центр 23 вращения качательного перемещения. На схеме 10 а приводное колесо 15 находится в крайнем заднем (на схеме в крайнем правом) положении качательного перемещения, причем ранее осуществлено перемещение слева направо, а далее направление перемещения изменяется на противоположное и приводное колесо 15 перемещает приводную направляющую 18 в направлении против часовой стрелки, что представляет собой перемещение вперед. В то же время приводная направляющая 18' с другой стороны велосипеда все еще перемещается в том же (прямом) направлении и еще не достигла своего крайнего положения, когда ее направление качательного перемещения поменялось на противоположное. Несмотря на то что угловая скорость обоих приводных колес 15 и 15' одинакова, это условие не выполняется для угловой скорости углового перемещения приводных направляющих 18 и 18'. Так как приводная направляющая 18 находится в крайнем положении качательного перемещения, ее угловая скорость равна нулю, а направление перемещения меняется на противоположное. После этого происходит угловое ускорение и угловая скорость увеличивается. Угловая скорость приводной направляющей 18' с другой стороны все еще положительна, но медленно уменьшается. С учетом того, что на заднем валу заднего колеса 2 велосипеда находятся два тросовых барабана,которые соединены с соответствующими муфтами обгона, одна из двух муфт обгона будет заблокирована (то есть находиться в режиме привода) и будет иметь более высокую угловую скорость в прямом направлении, так как задний вал не может иметь одновременно две скорости. Таким образом, понятно, что в условиях, показанных на фиг. 10 а, правая приводная направляющая 18', обозначенная штриховой ли-9 021264 нией, имеет большую прямую угловую скорость, поэтому система с правой стороны работает в качестве привода, а система с левой стороны еще не может работать в качестве привода. После этого угловая скорость качательного перемещения правой приводной направляющей 18', обозначенной штриховой линией, уменьшается, а скорость качательного перемещения приводной направляющей с левой стороны увеличивается. Система вскоре достигнет положения, в котором мгновенные угловые скорости замедляющейся и ускоряющейся сторон станут равны, после чего все поменяется местами и задача приведения в движение перейдет на систему с левой стороны. На схеме 10b показано положение, в котором левая приводная направляющая 18 достигла другого крайнего положения, в котором ее угловая скорость равна нулю, после чего она поворачивается в направлении назад (то есть слева направо, то есть назад). В этом положении правая приводная направляющая 18', обозначенная штриховой линией, опять перемещается в прямом направлении, а ее угловая скорость имеет ту же величину и направление, что и на схеме 10 а, за тем исключением, что сейчас она ускоряется, а на схеме 10 а замедлялась. При сравнении схем 10 а и 10b видно, что, когда с одной стороны достигнуто крайнее положение приводной направляющей, другая сторона уже перемещается в прямом направлении, поэтому приводные участки качательного перемещения с двух сторон перекрывают друг друга, благодаря чему приведение в движение осуществляется непрерывно. Перемещение с замедлением приводного рычага с одной стороны происходит, когда с другой стороны осуществляется ускорение, из чего можно сделать вывод о том, что на участке замедления/ускорения всегда есть точка, в которой угловые скорости качательного перемещения равны. В этих точках или участках привод работает плавно, то есть сдвиг с одной стороны на другую происходит незаметно. Ниже описано, что такой теоретически гладкий сдвиг требует небольшого скачка крутизны на участках сопряжения кривых, которые сменяют друг друга, с целью обеспечения действительно гладкого перехода, когда также учитывается гибкое расширение троса под действием нагрузки. На схемах 10 с и 10d показаны подобные положения, но с измененными формами приводных направляющих 18 и 18'. Изменение привело к тому, что в направляющей, показанной на схеме 10 с, в заднем крайнем положении качательного перемещения касательная линия, проведенная к приводной направляющей, больше не пересекает центр 23 вращения, а сдвинута на заданное расстояние от него. Эта точка касания находится в разных положениях при качательном перемещении, и на схеме 10 с показана круговая траектория 46, по которой она перемещается. При качательном перемещении расстояние между касательной линией и центром 23 вращения всегда постоянно. Другое отличие заключается в том, что приводные направляющие 18 и 18' имеют дугообразную форму, дугообразная часть является выпуклой вверх из крайнего положения, показанного на фиг. 10 с, и эта часть имеет небольшой изгиб. Кинематические условия в целом соответствуют описанным со ссылкой на фиг. 10 а и 10b, но формы характеристических кривых, по существу, отличны. Указанные условия также отличались бы от условий на фиг. 10 а и 10b, если бы дугообразные направляющие части были заменены на линейные части, которые являлись бы касательной линией круга 46, которая пересекает крайнее положение приводной направляющей. На схемах 10 с и 10d также видно, что угловая разница между двумя крайними положениями качательного перемещения увеличилась, то есть при полном обороте вокруг приводного вала 4 приводные направляющие проходят более широкий угловой диапазон, что приводит к увеличению передаточного числа между приводным валом 4 и задним колесом 2 при тех же остальных размерах. Дугообразная форма, а также расположение с угловым сдвигом приводной направляющей обеспечивают другие существенные преимущества, которые описаны подробно ниже. На схемах 10e и 10f форма приводных направляющих 18 и 18' изменена по сравнению с описанной выше дугообразной формой. Над точкой контакта, которая соответствует крайнему правому качательному положению, показанному на схеме 10e, приводная направляющая имеет практически ту же дугообразную форму, что и на схемах 10 с и 10d. Разница заключается в том, что под точкой контакта (то есть в направлении центра 23 вращения) характер изгиба изменяется, что означает, что выпуклая изогнутая линия становится вогнутой и кривая имеет перегиб в отмеченной точке контакта. Приводные направляющие 18 или 18' имеют прогиб в направлении внутрь, поскольку они могут входить в контакт с приводным колесом 15 или 15'. Таким образом, ближний от качательного вала 11 конец приводных направляющих 18 и 18' находится там, где расстояние между центром вращения и кругом, образованным точками контакта приводного колеса 15, 15', минимально. Эта коротая вогнутая дугообразная часть имеет значение при качательном перемещении качательного рычага назад, ее наличие приводит к уменьшению угловой скорости и ускорения, и она имеет важное значение на первом активном участке качательного перемещения, когда приближающийся качательный рычаг воспринимает нагрузку. Далее приведено более подробное описание со ссылкой на фиг. 11, на которой показаны характеристические свойства приводной направляющей 18 и 18', которая имеет указанный выше изгиб. На чертеже показана левая приводная направляющая 18 в двух крайних положениях качательного перемещения. В этих положениях с левой стороны правая приводная направляющая 18' и правое приводное колесо 15' показаны штриховой линией. Когда приводной вал 4 поворачивается между указанными двумя крайними положениями, его полный угловой диапазон равен Alpha, и при таком повороте приводная направляющая 18 осуществляет качение (вращение) из крайнего заднего положения вперед, то есть в направлении против часовой стрелки. Когда приводной вал 4 проходит этот полный угловой диапазон Alpha, приводная направляющая 18 вместе с качательным рычагом проходит лишь угловой диапазон Beta. Когда левая приводная направляющая 18 находится в крайнем заднем положении, то с правой стороны приводная направляющая 18' находится на угловом расстоянии 1 позади своего крайнего прямого положения, таким образом во время прохождения этого углового сдвига 1 приводные направляющие 18 и 18' с обеих сторон перемещаются вперед, то есть в приводном направлении. Когда левая приводная направляющая 18 находится в крайнем переднем положении, то с правой стороны приводное колесо 15' находится уже под углом 2 от своего крайнего заднего положения (в прямом направлении). Угол 1 (и угол 2 с другой стороны) обозначают угловой диапазон, в котором осуществляется действие привода с левой и правой сторон в прямом направлении, но с одной стороны угловое перемещение замедляется, а с другой стороны ускоряется, и существует узкий угловой диапазон, в котором угловые скорости с обеих сторон одинаковы или по существу одинаковы. Это равенство обеспечивает плавный переход при работе привода с одной стороны на другую сторону и наоборот. Следует отметить, что с точки зрения работы предлагаемой приводной системы не имеет значения, вращается ли приводной вал 4 ногой посредством двух приводных рычагов, или вращение обеспечивается двигателем, поэтому не имеет значения, является ли источником движения человек или двигатель. Форма и положение приводной направляющей 18, как показано на трех разных схемах на фиг. 10,оказывает существенное влияние на приводные характеристики велосипеда. На графиках a-с на фиг. 12 показана зависимость угловой скорости приводной направляющей 18 от углового положения качательного рычага 10. На графиках положительная угловая скорость соответствует направлению углового сдвига против часовой стрелки, что соответствует перемещению в направлении вперед, при этом отрицательная скорость соответствует противоположному случаю, обратному угловому перемещению при возвращении качательного рычага 10. График получен для линейной приводной направляющей 18, имеющей форму и положение, показанные на схемах 10 а и 10b, причем линия, проведенная к траектории 18,пересекает центр 23 вращения. График b соответствует дугообразной приводной направляющей 18, показанной на схемах 10 с и 10d, а график с соответствует приводной направляющей, показанной на схемах 10e и 10f, которая имеет S-образную форму с изгибом. В случае графика a угловая скорость качательного перемещения заметно изменяется при вращении приводного вала, что доставляет велосипедисту ощущение работы привода (которое может быть неприятным), которое существенно отличается от традиционного в случае езды на велосипеде, оборудованном традиционной цепью, так как в традиционных велосипедах, приводимых в движение круглой звездочкой, угловая скорость ведущего заднего колеса одинакова во всех угловых положениях приводного вала (педального вала). Полный положительный диапазон соответствует только угловому диапазону положения качательного рычага, равному 60, и в этом узком угловом положении область, которая может использоваться для работы привода, приблизительно на 10 меньше. Угловая скорость колеблется в этом узком диапазоне между 0,38 и 0,22. На графике b на фиг. 12 показан существенно более уравновешенный случай, чем на графике а. В диапазоне работы привода кривая, по существу, горизонтальна и изменяется только в двух крайних угловых положениях. Ширина положительного качательного диапазоне составляет приблизительно 70,что заметно больше, чем ранее. На отрицательной области графика имеются довольно большие угловые скорости, то есть качательный рычаг ускоряется до сравнительно высоких скоростей, когда возвращается в крайние задние положения. График c на фиг. 12 соответствует S-образной приводной направляющей с изгибом. Его положительный участок более равномерный и плоский, чем на графике b, диапазон такой же широкой, однако существенное отличие видно в области возвращения, так как максимальная угловая скорость при возвращении приблизительно на 40% меньше, чем ранее. Меньшая скорость на траектории возвращения и соответствующие меньшие отрицательные ускорения, по существу, уменьшают требования к усилиям,то есть возвращение качательного рычага 10 может быть обеспечено посредством приложения меньших пружинных усилий. На графиках на фиг. 12 ясно показано влияние формы приводной направляющей 18 на кривые, но не показано, как изменяется фактическое передаточное число в зависимости от углового положения приводного вала, так как заднее колесо всегда приводится во вращения стороной, которая имеет большую угловую скорость, а не противоположной стороной. На графике c на фиг. 12 показаны две специальные точки d и е, причем точка d лежит в приводной области, что указывает на положение, в котором работа привода переносится от приводной системы на другой стороне. В точке d на графике имеется излом, который создан намеренно, так как он может быть условием плавного перехода нагрузки привода с одной стороны на другую сторону под действием эффекта гибкого расширения привода. Трос также учтен. Так как при полном обороте приводного вала приводное колесо 15 дважды прокатывается по приводной направляющей, один раз в одном и один раз в другом направлении, существует точка на обратной траектории, которая соответствует точке d, и этой точкой является точка е. В этой точке может происходить небольшой скачок угловой скорости, который не ощущается. На графиках а и b на фиг. 13 показана зависимость передаточного числа, реализуемого предлагаемым приводом, от углового положения приводного вала 4 в случае, когда приводная направляющая 18 соответствует графикам, показанным на схемах 10 е и 10 е, а также имеет перегиб и двойную дугообразную форму. График a на фиг. 13 относится к левому качательному рычагу, а график b относится к правому качательному рычагу. Термин "передаточное число" описывает отношение угловой скорости заднего колеса 2 к угловой скорости приводного вала 4. Это определение передаточного числа справедливо,только когда данная сторона фактически приводит во вращение заднее колесо, а величины, отличные от этой (например, на направляющей возвращения), представляют собой пропорции, которые не имеют значения для работы привода и могут толковаться как отношение угловой скорости заднего тросового барабана (который в данный момент не вносит вклад в работу привода) и угловой скорости приводного вала 4. На графиках на фиг. 13 не учтено, что соответствующие стороны приводят во вращение одно и то же колесо, и передаточные числа соответствующих сторон показаны в одной системе координат независимо друг от друга и без учета действия другой стороны. Интересно, что эти независимые кривые, показанные в одной системе координат, пересевают друг друга в положениях приводного вала 150 и 330. Вблизи точек пересечения передаточное число стороны, осуществляющей работу привода до точки пересечения, немного уменьшается, а передаточное число с другой стороны резко увеличивается, и две кривые пересекаются друг с другом под существенным углом, при этом скорость стороны, на которой происходит увеличение, довольно высока. Фиг. 14 отличается от фиг. 13 тем, что на ней учтены фактические эффекты пересечения, из-за которых левая сторона влияет на правую сторону и наоборот, то есть заднее колесо всегда приводится во вращение той стороной, которая имеет большую угловую скорость. Также учтено, что, когда тяговое усилие увеличивается, происходит небольшое гибкое растяжение троса. Также показаны тросовые усилия Fa и Fb на соответствующих сторонах в той же системе координат. Усилие Fa показано более толстой, а усилие Fb более тоникой линией. В положении приводного вала, приблизительно соответствующем углу 150, сторона, которая ускоряется в положительном направлении, смещается и гибко растягивается, но с другой стороны натяжение медленно уменьшается и резко пропадает, когда на другую сторону воздействует полное усилие, соответствующее графику а. Для плавного перехода этого усилия с одной стороны на другую необходим небольшой скачок, показанный на фиг. 13, так как этот скачок уравновешивает задержку, вызванную гибким растяжением троса. Графики симметричны относительно двух сторон, то есть в диапазоне около 330 сдвиг происходит тем же образом, но в другом направлении. Когда гибкое растяжение троса учтено, кривые а и b на фиг. 14 имеют гибкий сдвиг без резкого скачка. Фактическая работа привода переходит на верхнюю из двух кривых. Приводная кривая довольно близка к традиционной для велосипедов с цепным приводом, а в угловом диапазоне, в котором передаточное число немного уменьшается, велосипедист чувствует, что ехать на велосипеде стало как будто легче. При определенном подборе первоначальных условий можно сделать так, чтобы этот "легкий" диапазон приходился на угловое положение педалей, когда они находятся в крайних верхних и нижних мертвых точках. На фиг. 13 и 14 также учтено влияние на передаточное число, вызванное сдвигом тягового рычага 17 качательного рычага, а также средним положением шкивов 26 а и 26b. Перед подробным описанием этого влияния со ссылкой на фиг. 8 описан еще один признак настоящего изобретения, в соответствии с которым велосипедист может намеренно изменять приводные характеристики. Для уравновешенных приводных кривых, показанных на фиг. 14, предполагается, что ось 23 качательного перемещения качательных рычагов 18 и 18' лежит в центре качательного вала 11. В варианте осуществления, показанном на фиг. 14, ось качательного перемещения может быть расположена вдали от оси приводного вала 11. С этой целью в центральном гнезде в центральной нижней части качательного рычага 10 выполнен подшипник 47, имеющий внутреннее кольцо, в которое вставлен дисковый кулачок 48. Дисковый кулачок 48 содержит отверстие с осью, которая смещена от центра внутреннего кольца, при этом в отверстие вставлен и шарнирно соединен с ним качательный вал 11. К дисковому кулачку в положении, сдвинутом относительно отверстия, прикреплен палец 49, который принимает конец боуденовского троса 50, который служит для регулировки приводной кривой. Боуденовский трос 50 может регулировать угловое положение дискового кулачка 48 на качательном валу 11, при этом положение фактического центра вращения (качательного перемещения) изменяется, что влияет на приводную кривую. Регулировка приводной кривой является свойством предлагаемого изобретения, которое не известно и не достижимо в традиционных приводах велосипедов, поэтому данных о влиянии такой регулировки не существует. Можно предположить, что при монотонной работе привода возможность регулировки приводной кривой делает процесс более интересным и развлекательным, кроме того, у разных велосипедистов могут быть разные любимые приводные кривые. Многие велосипедисты предпочитают, чтобы педали нажимались легче и быстрее в крайних верхних и нижних мертвых положениях (например, при езде в гору), и им может потребоваться регулировка этого эффекта. Путем регулировки приводной кривой можно регулировать то, как быстро устают мышцы ног. Вариант осуществления, показанный на фиг. 8, представляет собой лишь один из немногих возможных способов регулировки приводной кривой, и могут быть созданы несколько других регулировочных средств, которые фактически сдвигают действительный центр вращения с оси качательного вала 11. На фиг. 15, как и на фиг. 6 и 8, показан качательный рычаг 10, а далее описано, как можно поддер- 12021264 живать приводную кривую неизменной при регулировке передаточного числа. На чертеже показаны лишь те элементы, которые необходимы для понимания данного аспекта. Ближний от качательного вала 11 край приводного рычага 16 качательного рычага 10 образует S-образную приводную направляющую. Приводное колесо 15 показано в двух крайних положениях приводной направляющей 18, а штрихпунктирная линия обозначает направляющую 51, образованную центром приводного колеса 15. Центр 23 вращения качательного рычага 10 соединен соответствующими частями линий с центрами приводного колеса 15 в двух крайних положениях, причем указанные части линий образуют угол , составляющий приблизительно от 15 до 20. При попеременном качательном перемещении каждая точка качательного рычага 10 качается вокруг центра вращения 23 и все подобные точки совершают такие же угловые смещения. Однако это условие не применимо к приводному колесу 15, так как при приводном перемещении оно катится по приводной направляющей 18, и при таком перемещении угловое положение его центра отличается от углового положения качательного рычага 10, при этом в двух крайних положениях относительная угловая разница составляет угол . Эта разница отражает компенсацию приводной кривой,которая возможна на приводной стороне. Треугольное внутреннее отверстие качательного рычага 10 обеспечивает пространство для перемещения приводного колеса 15, а также обеспечивает пространство для перемещения шкивов 38 по тяговой направляющей 19. На фиг. 15 вал 35, который соединяет шкивы 38, показан в двух крайних положениях своей траектории. В показанном варианте осуществления тяговая направляющая 19 представляет собой прямую линию с периодическими углублениями, которая смещена на заданное расстояние от центра 23 вращения и по сравнению с задней частью линии, которая образует угол , отклонена назад на угол приблизительно от 40 до 50. Прямая линия, образующая удлинение тяговой направляющей 19, либо лежит в центре приводного колеса 15, когда оно находится в крайнем нижнем положении, либо между ними лишь небольшое расстояние, при этом в любом случае эта линия находится намного ближе к центру приводного колеса 15, чем к центру 23 вращения. На фиг. 15 также показаны соединительные линии между центром 23 вращения и центрами вала 35 в двух крайних положениях, и эти линии образуют друг с другом угол . Теоретически этот угол представляет собой величину изменения углового положения вала 35 шкивов при изменении передаточного числа в системе координат качательного рычага 10. Полное угловое отклонение фактически будет меньше, так как трос 28 при всех мгновенных положениях шкивов 38 направлен по касательной линии тросового барабана, и это направление изменяется, когда шкивы 38 перемещаются по тяговой направляющей 19. В крайнем внутреннем положении (которое соответствует самой маленькой передаче) с соответствующими частями линий, которые образуют угол , трос 28 образует угол 1, а в крайнем внешнем положении (которое соответствует самой высокой передаче) трос 28 образует угол 2. Углы 1 и 2 отличаются друг от друга в любом положении практически на одну и ту же величину. Указанное расположение и конструкция тяговой направляющей 19 уменьшает угловое отклонение, при этом подобные уменьшающие отклонение системы использовались для позиционирования и управления тонармами классических проигрывателей грампластинок для обеспечения перемещения иглы по касательной к направляющим канавкам на крайних внешней и внутренней дорожках и обеспечения перпендикулярности направления проигрывания канавкам. Для конструкции тяговой направляющей 19, показанной на фиг. 15, описанные выше приводные кривые справедливы только в случае больших диапазонов передаточного числа, а при меньших передаточных числах приводная кривая немного искажается, но величина искажения настолько мала, что большинство велосипедистов не замечают, что в случае изменения передаточных чисел также меняются кривые. Как показано на фиг. 15, под действием тросовых усилий изменяется не только амплитуда усилия,действующего на вал 35 шкивов 26 а и 26b, но и направление при качательном перемещении. До сих пор были описаны и объяснены условия, влияющие на изменение передаточного числа, когда ненагруженный вал 19 перемещается по тяговой направляющей 19. Ясно, что требуемый сдвиг вала 35 по тяговой направляющей будет легче осуществить, если глубина углублений 37, которые фиксируют положение вала 35, будет меньше. В вариантах осуществления, показанных на фиг. 8 и 15, форма углублений 37 и расстояние между ними одинаковы. Углубления 37 предназначены для удержания и фиксации вала 35 в данном положении в прямых активных областях качательного перемещения и предотвращения выхода из контакта и перемещения вала по тяговой направляющей под действием компонент усилий, которые действуют в направлении направляющей. Устойчивость положения увеличивается при увеличении глубины углублений 37. Такое увеличение глубины углублений предотвращает легкий выход вала из контакта с углублением под действием поперечных сил. Оптимальность конструкции будет обеспечена, если во всех возможных положениях вала 35 профиль и глубина углубления 37 будут такими, что компонента тросовых усилий, действующая в направлении направляющей, будет оставаться недостаточной для перемещения вала 35 из соответствующего углубления 37, причем при ненагруженном возвращении качательного рычага 10 или других условиях без нагрузки усилия намеренной регулировки могут превысить удерживающий эффект тросовых смещающих усилий, и вал может 35 выйти из данного углубления и переместиться по направляющей в следующее углубление. В других положениях тяговой направляющей положение усилий, действующих на вал 35, будет отличным. Поэтому условия, определяющие форму и глубину углублений 37 (то есть необходимые для удержания положения под нагрузкой и обеспечения перемещения без нагрузки), изменяются по направляющей, что потребует использования углублений 37 с разной формой и глубиной. С учетом этих условий вместо использования углублений 37, показанных на фиг. 8 и 15, с равномерными глубиной и интервалом, предпочтительно следует использовать на тяговой направляющей углубления с переменными глубиной и интервалом, как показано на фиг. 6. Углубление 37m, расположенное дальше всего от центра 23 вращения, имеет наименьшую глубину и ширину, так как в этом углублении при качательном перемещении тросовые усилия практически перпендикулярны линии тяговой направляющей 19, а компоненты тросовых усилий, действующие в направлении направляющей, очень малы. На фиг. 6b показан увеличенный местный вид фиг. 6 в центральном отверстии качательного рычага 10, на котором показан вал 35 и соответствующая часть тяговой направляющей 19. На этом чертеже видны сравнительно неглубокие и немного несимметричные углубления. На фиг. 6 с, которая также представляет собой увеличенный вид фиг. 6b, показан еще один предпочтительный способ перемещения шкивов 26 а и 26b. Здесь вал 35 шкивов 26 а, 26b не соединен непосредственно с углублениями тяговой направляющей 19, а пропущен через отверстие, ограниченное элементом 35 скольжения, и шарнирно соединен с ним. В данном случае тяговая направляющая 19 содержит асимметричные зубцы в качестве направляющих, причем форма и интервал зубцов одинаковы по всей направляющей 19, как на фиг. 8 и 15. Профиль зубца подобен профилю пилы, а глубина зубца меньше глубины углублений, показанных на фиг. 8 и 15. Зубец на элементе 55 скольжения и вдоль тяговой направляющей 19 имеет, по существу, одинаковые и дополняющие друг друга профили. Когда элемент 55 расположен на тяговой направляющей 19, вдоль длинной части зацепления происходит временное зацепление, то есть не только вал 35 входит в зацепление с одним из углублений 37, как в предыдущих конструкциях. Требуется равномерный профиль и интервал зубцов, так как один и тот же элемент 55 скольжения перемещается по всей тяговой направляющей 19 и входит в зацепление с множеством углублений. Тот факт, что с обеих сторон велосипеда выполнена соответствующая приводная система, обеспечивает ряд возможностей, которые вовсе недоступны в случае традиционных велосипедов с цепным приводом. Одной такой возможностью является, например, то, что велосипедист может регулировать приводную кривую, как описано со ссылкой на фиг. 8. Еще одно базовое отличие обеспечивается тем,что при работе привода на работу велосипеда практически не действует изгибающий момент, так как приводные рычаги передают усилие в плоскости приводного колеса 15, которое закреплено на пальце 9,который соединяет два приводных рычага, и это усилие передается на заднее колесо 2 в плоскости колеса, то есть без поперечного сдвига плоскости действия силы. Устранение действия изгибающей нагрузки на раму обеспечивает ощущение легкости езды. Еще одна возможность обеспечивается тем, что конструкции с левой и правой сторон симметричны и существует возможность регулирования различных передаточных чисел в левой и правой системах. Такая асимметрия может быть необходима, если велосипедист желает уделять особое внимание одной из своих ног. Использование разных передаточных чисел с двух сторон необычно, но разница на не более чем 10-20% может обеспечить достаточное облегчение для ноги, требующей специального ухода. Кроме того, создание небольшой асимметрии может изменить монотонный и скучный характер езды на велосипеде и может предотвратить преждевременную усталость ног. Еще одно преимущество обеспечивает тем, что нет необходимости выполнять одну сторону велосипеда асимметрично, что требуется в традиционных велосипедах, в которых привод расположен с одной стороны. Нагрузочная способность заднего колеса повышается, если спицы расположены симметрично. Как указано ранее, благодаря симметричной конструкции на раму не воздействует изгибающий момент, который необходимо компенсировать мускульными усилиями велосипедиста в случае велосипеда с цепным приводом. На фиг. 17 и со ссылкой на фиг. 9 показан вариант осуществления, обеспечивающий регулировку передаточного числа с одной стороны относительно другой стороны. Изменения касаются левого боуденовского троса 39 и правого боуденовского троса 39', но вместе одновременно с этим регулированием необходимо таким же образом регулировать передаточные числа тросов 40 и 40'. Регулировочный узел может быть закреплен на нижнем опорном элементе 41. Оболочка тросов 39 и 39' здесь проведена через соответствующие отверстия, выполненные в нижнем опорном элементе 41, при этом оболочки имеют соответствующую резьбу в торцевых областях. Торцы оболочки с резьбой окружены зубчатыми гайками 56, 57 с резьбой, при этом гайка 56 с резьбой зацеплена с зубцом, расположенным вдоль полукруглого корпуса зубчатого дугообразного рычага 58. Дугообразный рычаг 58 имеет центральное крепежное отверстие, в которое вставлен палец 59, обеспечивающий шарнирный поворот для рычага. Палец 59 закреплен на нижнем опорном элементе 41. Противоположный торец дугообразного рычага 58 соединен еще с одним боуденовским тросом, который тянет его в плоскости, перпендикулярной плоскости чертежа, и регулирует тем самым величину асимметрии между левой и правой сторонами. Боуденовский трос 60 может поворачивать дугообразный рычаг 58 в обоих направлениях вокруг пальца 59. В первоначальном положении, показанном на фиг. 17, тросы 39 и 39' обеспечивают одинаковое передаточное число с обеих сторон. Если из этого первоначального положения зубчатую дугу на дугообразном рычаге 58 повернуть в любом направлении, это вызовет поворот гайки 56 с резьбой в другом (противоположном) направлении. Зуб гайки 56 зацепляет зуб гайки 57 с резьбой и вызывает ее поворот в другом (первом) направлении. Осевое положение гаек 56 и 57 с резьбой фиксировано, но вращение в противоположном направлении вызывает осевое перемещение оболочек с резьбой в противоположных направлениях, перпендикулярных плоскости нижнего опорного элемента 41 (на чертеже соответственно вверх и вниз). В результате этого осевого перемещения боуденовские тросы 39 и 39' с левой и правой сторон перемещаются в противоположных направлениях относительно их первоначальных положений. В результате этого смещения передаточные числа с левой и правой сторон становятся разными. Регулировка передаточного числа позволяет осуществлять уход за одной ногой за счет ответного увеличения нагрузки на другую сторону. Известны несколько физиологических состояний человека, в которых одна конечность отвечает за перемещение, но, тем не менее, может воспринимать меньшую нагрузку. Регулировка нагрузки между левой и правой ногами является сложноразрешимой задачей для велосипедов с цепным приводом. Возможности, обеспечиваемые приводной системой в соответствии с настоящим изобретением, например регулировка приводной кривой, изменяющая ощущение езды на велосипеде, и, кроме того, возможность регулировки передаточных чисел для левой и правой ног открывают небывалые перспективы, при этом полезность таких возможностей станет ясна только после сбора большого количества экспериментальных данных. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Привод попеременного действия, предназначенный для велосипедов и транспортных средств,приводимых в движение аналогичным велосипедам образом, содержащих раму (1) и ведущее колесо (2),соединенное с возможностью вращения с рамой (1), причем указанный привод содержит пару приводных узлов одинаковой конструкции с противоположными приводными направлениями, прикрепленных с противоположных сторон рамы (1), причем указанные приводные узлы содержат соответствующие качательные рычаги (10, 10'), шарнирно соединенные с общим качательным валом (11), прикрепленным к раме (1), и выполненные с возможностью осуществления попеременного качательного перемещения вокруг качательного вала (11), причем каждый качательный рычаг (10, 10') имеет соответствующий приводной рычаг (16, 16') с краем, образующим приводную направляющую (18, 18'), причем указанные приводные узлы содержат общий приводной вал (4), соединенный шарнирно с указанной рамой (1) для кругового перемещения вокруг своей оси, и каждый из указанных приводных узлов содержит соответствующий палец (9, 9'), ось которого, по существу, параллельна и радиально сдвинута от указанной оси приводного вала (4), соединенный с указанным общим приводным валом (4) и вращающийся по соответствующей круговой траектории вокруг указанной оси приводного вала (4), пару приводных колес (15,15'), каждое из которых соединено с возможностью вращения с указанным пальцем (9, 9'), причем каждое из указанных колес (15, 15') размещено в одной из указанных приводных направляющих (18, 18') так,что вращение указанных приводных колес (15, 15'), катящихся в первом и затем в обратном втором направлении по указанной соответствующей приводной направляющей (18, 18'), вызывает попеременное качательное перемещение указанного качательного рычага (10, 10'), причем указанные приводные колеса(15, 15') механически связаны друг с другом и в каждом положении сдвинуты на угол 180 друг относительно друга вокруг указанного приводного вала (4), пару гибких тросов (28, 28'), каждый из которых соединен с соответствующим одним из указанных качательных рычагов, и соответствующие смещенные тросовые барабаны (61, 61'), закрепленные на валу указанного ведущего колеса (2) и соединенные с ведущим колесом (2) с обеспечением передачи момента вращения на указанное колесо (2) от указанного тросового барабана (61, 61') при вращении тросового барабана (61, 61') в прямом направлении, причем каждый из указанных тросов (28, 28') соединен и намотан с заданным количеством витков на соответствующий тросовый барабан (61, 61') так, что при работе привода количество указанных витков изменяется взаимно попеременно, при этом каждый качательный рычаг (10, 10') дополнительно содержит головную часть (14, 14'), окружающую указанный качательный вал (11) и соединенную ближним от качательного вала (11) концом указанного приводного рычага (16, 16'), тяговый рычаг (17, 17'), соединенный своим ближним от качательного вала (11) концом с указанной головной частью (14, 14') так, что указанный приводной рычаг (16, 16') образует угол с указанным тяговым рычагом (17, 17'), и соединительный рычаг(20, 20'), соединяющий между собой дальние от качательного вала (11) концы указанного приводного рычага (16, 16') и указанного тягового рычага (17, 17'), причем указанный приводной рычаг (16, 16'), указанный тяговый рычаг (17, 17') и соединительный рычаг (20, 20') совместно ограничивают, по существу,треугольное отверстие, в котором расположено указанное приводное колесо (15, 15') и вал указанного приводного колеса (15, 15'), причем край тягового рычага (17, 17'), направленный к указанному треугольному отверстию, образует тяговую направляющую (19, 19'), которая, по существу, определяет передаточное отношение привода, при этом каждый приводной узел содержит по меньшей мере один шкив(26, 26'), который содержит вал (35, 35'), выполненный с возможностью направленного перемещения по указанной тяговой направляющей (19, 19'), причем указанная приводная направляющая (18, 18') выполнена так, что между самой дальней ее точкой от качательного вала (11) и ближней точкой, в которой ука- 15021264 занный качательный рычаг (10, 10') находится в одном из своих крайних положений при качательном перемещении и в которой указанное приводное колесо (15, 15') входит в контакт с указанной приводной направляющей (18, 18'), образована первая область направляющей (18, 18'), которой может быть сопоставлен отрезок линии, при этом указанный отрезок линии смещен от оси (23) указанного качательного вала (11) на первое заданное расстояние при качательном перемещении, а указанная тяговая направляющая (19, 19') расположена таким образом, что указанной тяговой направляющей (19, 19') может быть сопоставлен другой отрезок прямой линии, также смещенный от указанной оси (23) качательного вала (11) на второе заданное расстояние при качательном перемещении. 2. Привод по п.1, отличающийся тем, что указанная первая область приводной направляющей (18,18') имеет дугообразную форму и является выпуклой. 3. Привод по п.2, отличающийся тем, что указанная приводная направляющая (18, 18') имеет точку перегиба в ближнем от качательного вала (11) конце указанной первой области направляющей (18, 18') и продолжается в направлении к качательному валу (11), образуя вторую область направляющей (18, 18'),которая имеет дугообразную вогнутую форму. 4. Привод по п.1, отличающийся тем, что выполнен таким образом, что, после того как указанный качательный рычаг (10, 10') достиг одного из своих крайних положений, активный в данный момент один из указанных приводных узлов создает качательное перемещение с уменьшающейся угловой скоростью, абсолютное значение которой больше, чем у угловой скорости, создаваемой другим неактивным в данный момент приводным узлом, действующим уже в том же направлении, при этом интенсивность увеличения угловой скорости этого неактивного в данный момент приводного узла выше, чем интенсивность замедления угловой скорости активного в данный момент приводного узла, и в период, когда угловые скорости, создаваемые двумя приводными узлами, практически равны, интенсивность увеличения ускоряющейся угловой скорости приводного узла немного больше, чем интенсивность замедления угловой скорости другого приводного узла, и эта небольшая разница интенсивностей учитывает гибкое растяжение указанного троса (28, 28') и обеспечивает плавный переход нагрузки привода между двумя приводными узлами. 5. Привод по п.1, отличающийся тем, что в каждом из указанных приводных узлов указанный качательный рычаг (10, 10') содержит пару одинаковых элементов (21 а, 21b), образующих приводную направляющую (18, 18') качательного рычага, соединенных друг с другом так, что между ними имеется заданный зазор. 6. Привод по п.5, отличающийся тем, что центральная плоскость приводного колеса (15, 15') лежит в центральной плоскости, расположенной между указанными элементами (21 а, 21b) качательного рычага, и указанное приводное колесо (15, 15') содержит выступ (36) между двумя своими поверхностями качения, входящими в контакт и катящимися по указанной приводной направляющей (18, 18'), причем указанный выступ (36) выступает в указанный зазор между указанными элементами (21 а, 21b) качательного рычага для обеспечения направленного перемещения указанного приводного колеса (15, 15'). 7. Привод по п.1, отличающийся тем, что указанное круговое перемещение указанного приводного вала (4) обеспечивается посредством соответствующих приводных рычагов (5, 6), расположенных с соответствующих сторон рамы (1) и жестко соединенных с указанным приводным валом (4), каждый из которых содержит пару хвостовиков (7, 8, 7', 8'), причем хвостовики (7, 7') расположены ближе к приводному валу (4) и образуют угол 180 друг с другом, а их внешние концы жестко соединены со вторыми хвостовиками (8, 8') посредством указанных пальцев (9, 9'), причем первые и вторые хвостовики (7, 8 и 7', 8') образуют тупой угол друг с другом. 8. Привод по п.1, отличающийся тем, что каждый указанный приводной узел содержит пару шкивов(26 а, 26b, 26a', 26b'), соединенных с возможностью вращения с указанными валами (35, 35') в их концевых областях, причем валы (35, 35') пропущены через указанное треугольное отверстие, размещены на указанных тяговых направляющих (19, 19') и выполнены с возможностью перемещения вдоль них, причем указанные шкивы (26 а, 26b, 26a', 26b') расположены симметрично с противоположных сторон каждого из указанных тяговых рычагов (17, 17'), а соответствующие ветви (28 а, 28b) указанного троса (28,28') проложены вокруг указанных шкивов (26 а, 26b, 26 а', 26b'), причем указанное треугольное отверстие выполнено достаточно большим для обеспечения направленного перемещения шкивов (26 а, 26b, 26a',26b') по всей длине указанной тяговой направляющей (19, 19') без столкновения с указанными приводными колесами (15, 15'), также перемещающимися в том же треугольном отверстии. 9. Привод по п.8, отличающийся тем, что каждая из указанных тросовых ветвей (28 а, 28b и 28 а',28b') прикреплена своими концами к соответствующему тросовому барабану (61, 61'), причем указанные тросовые ветви намотаны витками во взаимно противоположных направлениях на соответствующих тросовых барабанах (61, 61'), далее заведены на указанные шкивы (26 а, 26b, 26a', 26b') и проведены через балансировочный шкив (30), прикрепленный к раме (1). 10. Привод по п.9, отличающийся тем, что указанные тросовые ветви (28 а, 28b и 28 а', 28b') проходят симметрично относительно центральной плоскости соответствующего качательного рычага (10, 10'),а вал указанного балансировочного шкива (30) соединен с возможностью вращения с рамой (1), так что плоскость, определяемая тросовыми ветвями (28 а, 28b) после сбегания с балансировочного шкива (30),- 16021264 представляет собой касательную плоскость к указанным шкивам (26 а, 26b). 11. Привод по п.8, отличающийся тем, что на краях обращенных к треугольному отверстию указанных тяговых рычагов (17, 17') сформирована последовательность отдельных углублений (37), каждое из которых выполнено с возможностью вмещения указанного вала (35) и сохранения его положения при качательном перемещении. 12. Привод по п.8, отличающийся тем, что содержит первый боуденовский трос (39, 39'), который имеет оболочку, прикрепленную к качательному рычагу (10, 10') вблизи ближнего от качательного вала(11) конца указанной тяговой направляющей (19, 19') в месте, расположенном вовнутрь указанного конца тяговой направляющей (19, 19'), второй боуденовский трос (40), который имеет оболочку, также прикрепленную к качательному рычагу (10, 10') вблизи места, в котором прикреплена указанная оболочка первого боуденовского троса (39), и возвратный шкив (38), соединенный с возможностью вращения с валом,прикрепленным к указанному качательному рычагу (10, 10') за пределами дальнего от качательного вала(11) конца указанной тяговой направляющей (19, 19') в месте соединения тягового рычага (17, 17') и соединительного рычага (20, 20'), причем первый и второй боуденовские тросы (39, 40) соединены с указанным валом (35, 35') шкивов (26 а, 26b), а один из тросов также проложен по указанному шкиву (38) до соединения с указанным валом (35). 13. Привод по п.12, отличающийся тем, что указанные боуденовские тросы (39, 40) прикреплены к указанному валу (35, 35') посредством подшипника, так что указанный вал (35, 35') выполнен с возможностью свободного качения по указанной тяговой направляющей (19, 19') при перемещении. 14. Привод по п.12, отличающийся тем, что указанные боуденовские тросы (39, 40) и указанный возвратный шкив (38) расположены в указанном зазоре между указанными элементами (21 а, 21b) качательного рычага. 15. Привод по п.12, отличающийся тем, что указанная рама (1) содержит верхний и нижний опорные элементы (42, 41), прикрепленные к соответствующим расположенным на расстоянии местам заднего стержня рамы, механизм изменения скорости с боуденовскими тросами (43, 44), которые могут натягиваться и ослабляться указанным механизмом, пару качательных балансиров (45, 45'), каждый из которых имеет центральную и две крайние соединительные точки, причем оболочки указанных боуденовских тросов (43, 44) прикреплены у указанного верхнего опорного элемента (42), а каждый из указанных боуденовских тросов (43, 44) соединен с центральной соединительной точкой соответствующего одного из указанных качательных балансиров (45, 45'), при этом в каждом приводном узле боуденовские тросы (39,39' и 40, 40'), которые выполняют одинаковые функции, соединены с крайними точками соответствующего одного из качательных балансиров (45, 45'), а тросы, выполняющие противоположные функции,соединены с концами второго из указанных качательных балансиров (45, 45'), при этом оболочки указанных боуденовских тросов (39, 40, 39', 40') в указанных приводных узлах соединены с указанным нижним опорным элементом (41). 16. Привод по п.11, отличающийся тем, что указанные углубления (37) вдоль указанной тяговой направляющей (19, 19') имеют соответствующие асимметричные профили и указанная асимметрия соответствует направлениям тросовых усилий, которые воздействуют на конкретное углубление, когда качательный рычаг (10, 10') находится в двух крайних положениях. 17. Привод по п.1, отличающийся тем, что содержит соответствующий регулировочный механизм в указанных головных частях (14, 14') указанных качательных рычагов (10, 10'), который сходным образом регулирует положение центра вращения качательного перемещения относительно центра указанного качательного вала (11) для одновременного изменения тем самым приводных характеристик указанных приводных узлов. 18. Привод по п.9, отличающийся тем, что содержит регулировочный узел для смещения относительных положений указанных валов (35, 35') с двух сторон рамы (1) для обеспечения разных передаточных отношений с двух сторон.
МПК / Метки
Метки: велосипедов, средств, движение, транспортных, аналогичным, попеременного, действия, привод, велосипедам, образом, приводимых
Код ссылки
<a href="https://eas.patents.su/24-21264-privod-poperemennogo-dejjstviya-dlya-velosipedov-i-transportnyh-sredstv-privodimyh-v-dvizhenie-analogichnym-velosipedam-obrazom.html" rel="bookmark" title="База патентов Евразийского Союза">Привод попеременного действия для велосипедов и транспортных средств, приводимых в движение аналогичным велосипедам образом</a>
Комбинированное устройство для ограничения проезда транспортных средств
Номер патента: 15905
Опубликовано: 30.12.2011
Автор: Сухачев Николай Викторович
МПК: E01F 13/12
Метки: средств, комбинированное, ограничения, устройство, проезда, транспортных
Формула / Реферат:
1. Комбинированное устройство для ограничения проезда транспортных средств, состоящее из шлагбаума, содержащего корпус с шарнирно закрепленной стрелой, и механически связанное с ним по меньшей мере одно противотаранное устройство с блокирующим элементом, отличающееся тем, что корпус шлагбаума выполнен с возможностью вращения относительно своей вертикальной оси и связан с противотаранным устройством таким образом, что при его повороте блокирующий...
Система безопасности для транспортных средств
Номер патента: 14575
Опубликовано: 30.12.2010
Автор: Хорват Имре
МПК: B60S 9/02
Метки: транспортных, безопасности, средств, система
Формула / Реферат:
1. Система безопасности для транспортных средств, позволяющая в случае опрокидывания или наклона транспортного средства поднимать его и возвращать в исходное положение,отличающаяся тем, что она содержитблок датчиков, контролирующий положение транспортного средства, подъемный блок (2), управляемый блоком датчиков, подъемную конструкцию (3), установленную в подъемном блоке (2),при этом подъемный блок (2), включающий подъемную конструкцию (3),...
Трансмиссионное устройство для наземных транспортных средств, а конкретнее, для автомобилей
Номер патента: 3825
Опубликовано: 30.10.2003
Авторы: Антонов Румен, Моран Фредерик
МПК: F16D 25/0638, F16H 63/30
Метки: конкретнее, наземных, средств, автомобилей, транспортных, устройство, трансмиссионное
Формула / Реферат:
1. Трансмиссионное устройство, в котором дифференциал (1, 301, 302) содержит корпус (2); входной вращающийся соединительный элемент (3, 303) и выходной вращающийся соединительный элемент (4); три вращающихся элемента (5, 6, 7; 350, 360, 370), выполненные с возможностью вращения относительно корпуса (2) и находящиеся во взаимном зацеплении друг с другом; два фрикционных сцепляющих устройства (9, 10; 209, 210; 309, 310) между упомянутыми...
Шина для большегрузных транспортных средств
Номер патента: 15374
Опубликовано: 31.08.2011
Авторы: Джонсон Филипп, Доминго Ален
МПК: B60C 9/22
Метки: большегрузных, средств, транспортных, шина
Формула / Реферат:
1. Шина с радиальным упрочняющим каркасом, содержащая арматуру короны, образованную по меньшей мере двумя рабочими слоями короны из нерастяжимых армирующих элементов, пересекающихся от одного слоя к другому под углами от 10 до 45° по отношению к направлению вдоль окружности, и покрытую в радиальном направлении протектором, причем указанный протектор соединен с двумя бортами посредством двух боковых стенок, а арматура короны содержит по меньшей...
Шина для большегрузных транспортных средств
Номер патента: 15429
Опубликовано: 31.08.2011
Авторы: Джонсон Филипп, Доминго Ален
МПК: B60C 9/22
Метки: шина, большегрузных, средств, транспортных
Формула / Реферат:
1. Шина с радиальным каркасным упрочняющим элементом, содержащим коронный упрочняющий элемент, образованный по меньшей мере двумя рабочими слоями короны из нерастяжимых армирующих элементов, пересекающихся от одного слоя к другому, образуя углы от 10 до 45° по отношению к направлению вдоль окружности, которая сама покрыта в радиальном направлении протектором, указанный протектор соединен с двумя бортами посредством двух боковых стенок, коронный...
Предыдущий патент: Способ ароматизации размещаемого в упаковке пищевого продукта
Следующий патент: Фармацевтический состав, обладающий сосудосуживающим, антиконгестивным, противовоспалительным действием (варианты)
Случайный патент: Применение флибансерина для лечения расстройств полового влечения в предклимактерический период