Оценка уровней текучей среды в системе погружного винтового насоса
Формула / Реферат
1. Способ определения оценочного уровня текучей среды в скважине без установки датчика внутри скважины с использованием насосной системы, которая содержит погружной винтовой насос, установленный в скважине, электродвигатель для привода насоса, контроллер, соединенный с электродвигателем, характеризующийся тем, что
определяют рабочий параметр электродвигателя;
определяют рабочие параметры насоса, включающие вращающий момент и скорость;
записывают в таблицу соответствия, ассоциированную с контроллером, по меньшей мере одно значение вращающего момента насоса при определенной скорости насоса;
поддерживают работу насоса с выбранной скоростью с помощью контроллера и определяют с помощью контроллера оценочный уровень текучей среды в скважине, используя рабочий параметр электродвигателя, рабочий параметр насоса и значения таблицы соответствия.
2. Способ определения оценочного уровня текучей среды по п.1, в котором дополнительно используют указанный оценочный уровень текучей среды для управления фактическим уровнем текучей среды в скважине посредством управления скоростью насоса.
3. Способ определения оценочного уровня текучей среды по п.1, в котором этап записи в таблицу соответствия включает в себя изменение скорости насоса в одном направлении от максимальной скорости до минимальной скорости и определение крутящего момента насоса для каждой конкретной скорости.
4. Способ определения оценочного уровня текучей среды по п.3, который включает в себя изменение скорости насоса в другом направлении от максимальной скорости до минимальной скорости и определение крутящего момента насоса для каждой конкретной скорости.
5. Способ определения оценочного уровня текучей среды по п.1, в котором определение рабочего параметра электрического двигателя содержит определение крутящего момента электродвигателя или скорости электродвигателя.
6. Способ определения оценочного уровня текучей среды по п.1, в котором определение рабочего параметра насоса содержит определение крутящего момента насоса или скорости насоса.
7. Способ определения оценочного уровня текучей среды по п.1, в котором контроллер представляет собой электронный компьютер, включающий в себя, по меньшей мере, модуль обработки, модуль сохранения, устройство ввода и устройство вывода.
8. Насосная система, содержащая
насос, выполненный с возможностью управления уровнем текучей среды в скважине;
электродвигатель, функционально соединенный с насосом и выполненный с возможностью привода насоса;
контроллер, функционально соединенный с электродвигателем и выполненный с возможностью управления работой насоса, при этом контроллер содержит
модуль определения электродвигателя, выполненный с возможностью определения рабочих параметров электродвигателя, выполненного с возможностью управления насосом в скважине, причем упомянутые рабочие параметры электродвигателя содержат крутящий момент электродвигателя и скорость электродвигателя;
модуль определения насоса, функционально соединенный с модулем определения электродвигателя и выполненный с возможностью определения рабочих параметров насоса на основе по меньшей мере одного рабочего параметра электродвигателя, причем упомянутые рабочие параметры насоса включают в себя крутящий момент насоса и скорость насоса;
модуль определения уровня текучей среды, функционально соединенный с модулем определения насоса и выполненный с возможностью определения оценочного уровня текучей среды в скважине,
при этом упомянутый модуль определения текучей среды содержит модуль первого режима, выполненный с возможностью генерирования выходных данных первого режима на основе работы насоса в первом режиме, включающих в себя значение скорости насоса и крутящего момента насоса, связанных с конкретными значениями уровня текучей среды над насосом, и сохранения таких данных в базе данных отображения; упомянутый модуль определения текучей среды дополнительно содержит модуль второго режима, функционально соединенный с модулем первого режима, при этом модуль второго режима выполнен с возможностью управления насосом во втором режиме для определения оценочного уровня текучей среды, при этом текущие значения скорости и крутящего момента насоса сравниваются со значениями скорости и крутящего момента насоса в базе данных отображения; и
модуль регулирования, функционально соединенный с модулем определения уровня текучей среды, причем модуль регулирования выполнен с возможностью регулирования скорости насоса для поддержания указанного оценочного уровня текучей среды при заданном значении точки установки.
9. Насосная система по п.8, в которой рабочий параметр электродвигателя характеризует крутящий момент электродвигателя или скорость электродвигателя.
10. Насосная система по п.8, в которой рабочий параметр насоса характеризует скорость насоса или крутящий момент насоса.
11. Насосная система по п.8, в которой модуль определения уровня текучей среды выполнен с возможностью изменения скорости электродвигателя до заданной скорости для определения оценочного уровня текучей среды в скважине.
12. Насосная система по п.8, в которой модуль первого режима выполнен с возможностью управления насосом на основе пропорционально-интегрально-дифференциальной (PID) функции или пропорционально-интегральной (PI) функции.
13. Насосная система по п.8, в которой модуль второго режима выполнен с возможностью управления насосом в режиме работы и получения значения скорости и крутящего момента насоса.
14. Насосная система по п.8, в которой указанный насос содержит насос, приводимый во вращательное движение.
15. Насосная система по п.8, в которой модуль первого режима и модуль второго режима выполнены с возможностью управления скоростью насоса или направления вращения насоса.
16. Насосная система по п.8, в которой насос представляет собой винтовой погружной насос.
17. Контроллер насоса, содержащий
модуль определения электродвигателя, выполненный с возможностью определения рабочих параметров электродвигателя, выполненного с возможностью управления насосом в скважине, упомянутые рабочие параметры электродвигателя содержат крутящий момент электродвигателя и скорость электродвигателя;
модуль определения насоса, функционально соединенный с модулем определения электродвигателя и выполненный с возможностью определения рабочих параметров насоса на основе по меньшей мере одного рабочего параметра электродвигателя, причем упомянутые рабочие параметры насоса содержат крутящий момент насоса и скорость насоса;
модуль определения уровня текучей среды, функционально соединенный с модулем определения насоса и выполненный с возможностью определения оценочного уровня текучей среды в скважине,
при этом упомянутый модуль определения текучей среды содержит модуль первого режима, выполненный с возможностью генерирования выходных данных первого режима на основе работы насоса в первом режиме, включающих в себя значения скорости и крутящего момента насоса, связанные с конкретными значениями уровня текучей среды над насосом, и сохранения таких данных в базе данных отображения; упомянутый модуль определения текучей среды дополнительно содержит модуль второго режима, функционально соединенный с модулем первого режима, причем модуль второго режима выполнен с возможностью управления насосом во втором режиме для определения оценочного уровня текучей среды при сравнении текущих значений скорости и крутящего момента насоса со значениями скорости и крутящего момента насоса в базе данных отображения; и
модуль регулирования, функционально соединенный с модулем определения уровня текучей среды, причем модуль регулирования выполнен с возможностью регулирования скорости насоса для поддержания указанного оценочного уровня текучей среды при заданном значении точки установки.
18. Контроллер насоса по п.17, выполненный с возможностью задания оператором значения требуемого уровня текучей среды.
19. Контроллер насоса по п.17, в котором рабочий параметр электродвигателя содержит крутящий момент электродвигателя или скорость электродвигателя.
20. Контроллер насоса по п.17, в котором рабочий параметр насоса характеризует скорость насоса или крутящий момент насоса.
21. Контроллер насоса по п.17, в котором модуль определения уровня текучей среды выполнен с возможностью линейного изменения скорости электродвигателя до заданной скорости для определения указанного оценочного уровня текучей среды в скважине.
22. Контроллер насоса по п.17, в котором модуль определения уровня текучей среды выполнен с возможностью определения оценочного уровня текучей среды по значению на поверхности и по оценочному уровню текучей среды над насосом.
23. Контроллер насоса по п.17, в котором модуль первого режима выполнен с возможностью управления насосом на основе пропорционально-интегрально-дифференциальной (PID) функции или пропорционально-интегральной (PI) функции.
24. Контроллер насоса по п.17, в котором модуль второго режима выполнен с возможностью управления насосом для его работы и получения значения скорости и крутящего момента насоса.
25. Контроллер насоса по п.17, который предназначен для насоса, приводимого во вращательное движение.
26. Контроллер насоса по п.25, который предназначен для винтового погружного насоса.
27. Контроллер насоса по п.17, в котором модуль первого режима и модуль второго режима выполнены с возможностью управления скоростью насоса или направления вращения насоса.

Текст
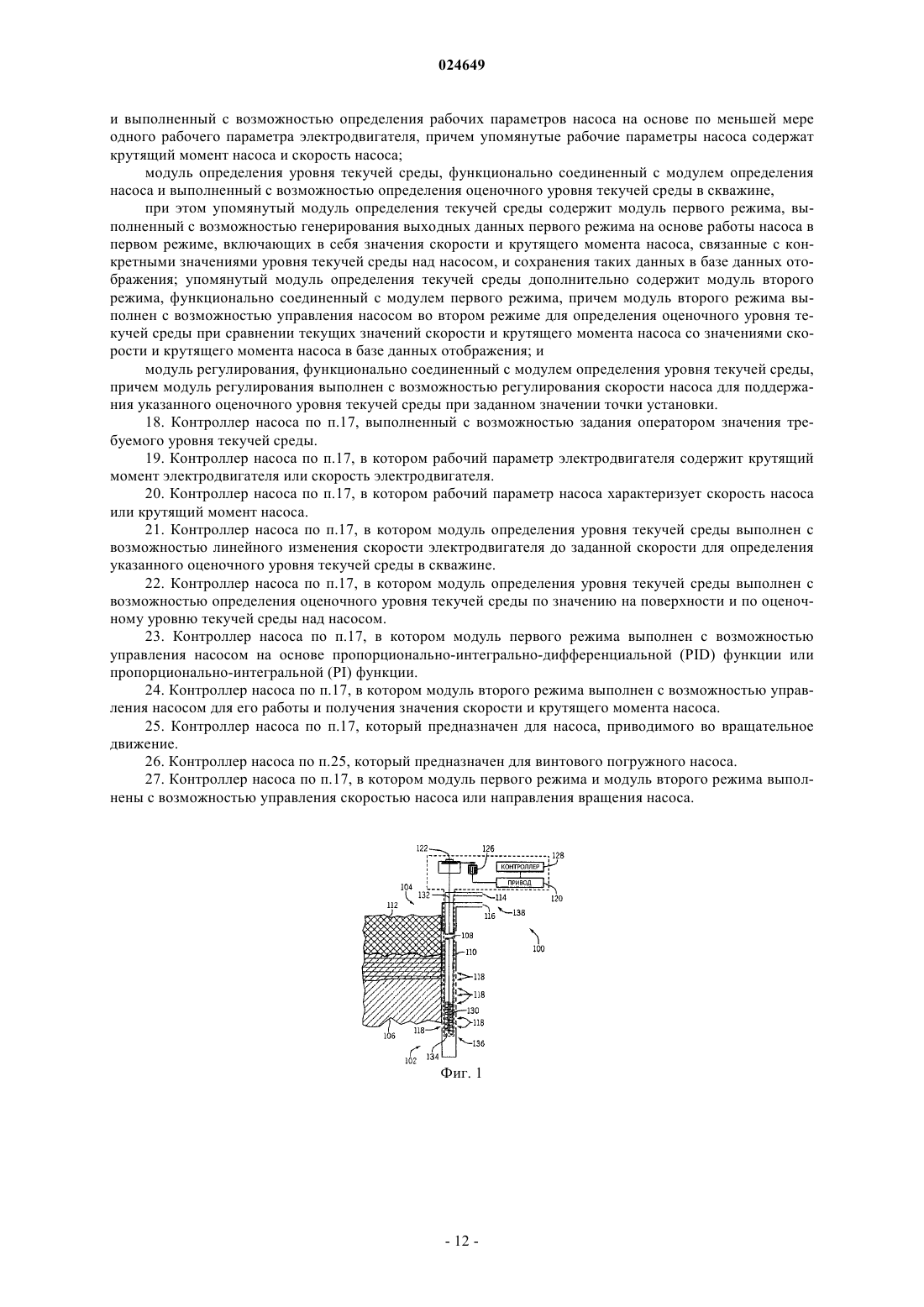
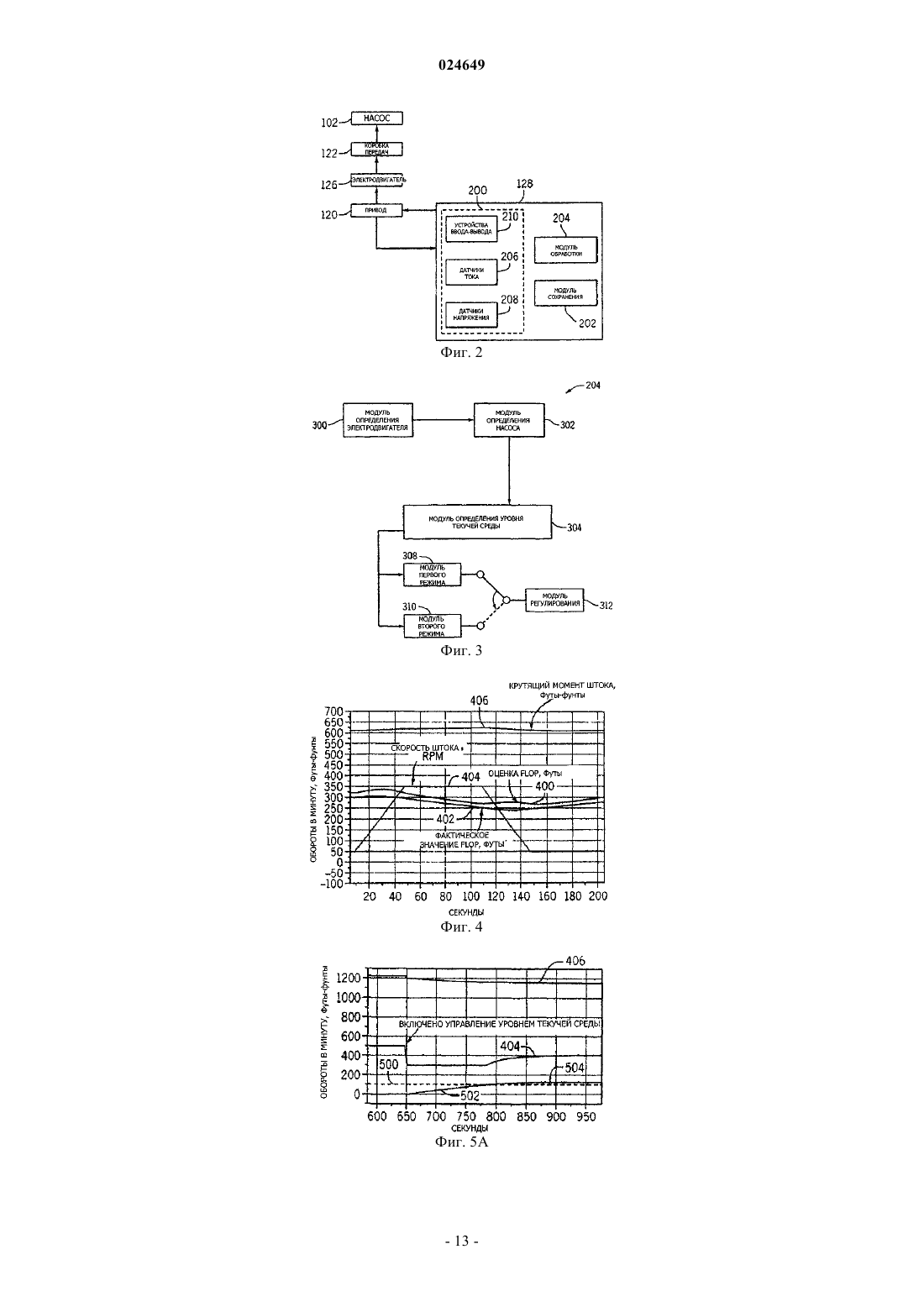
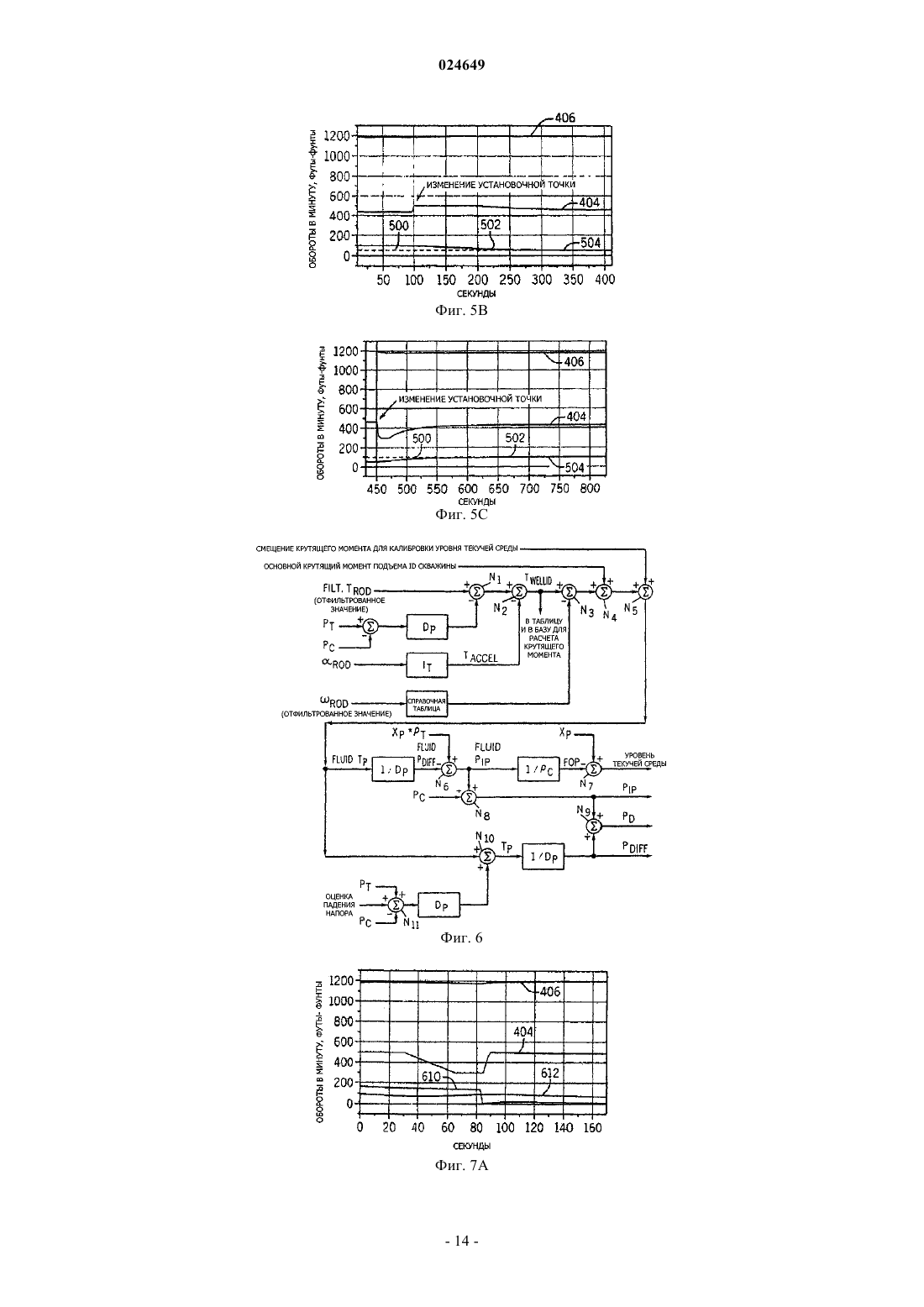
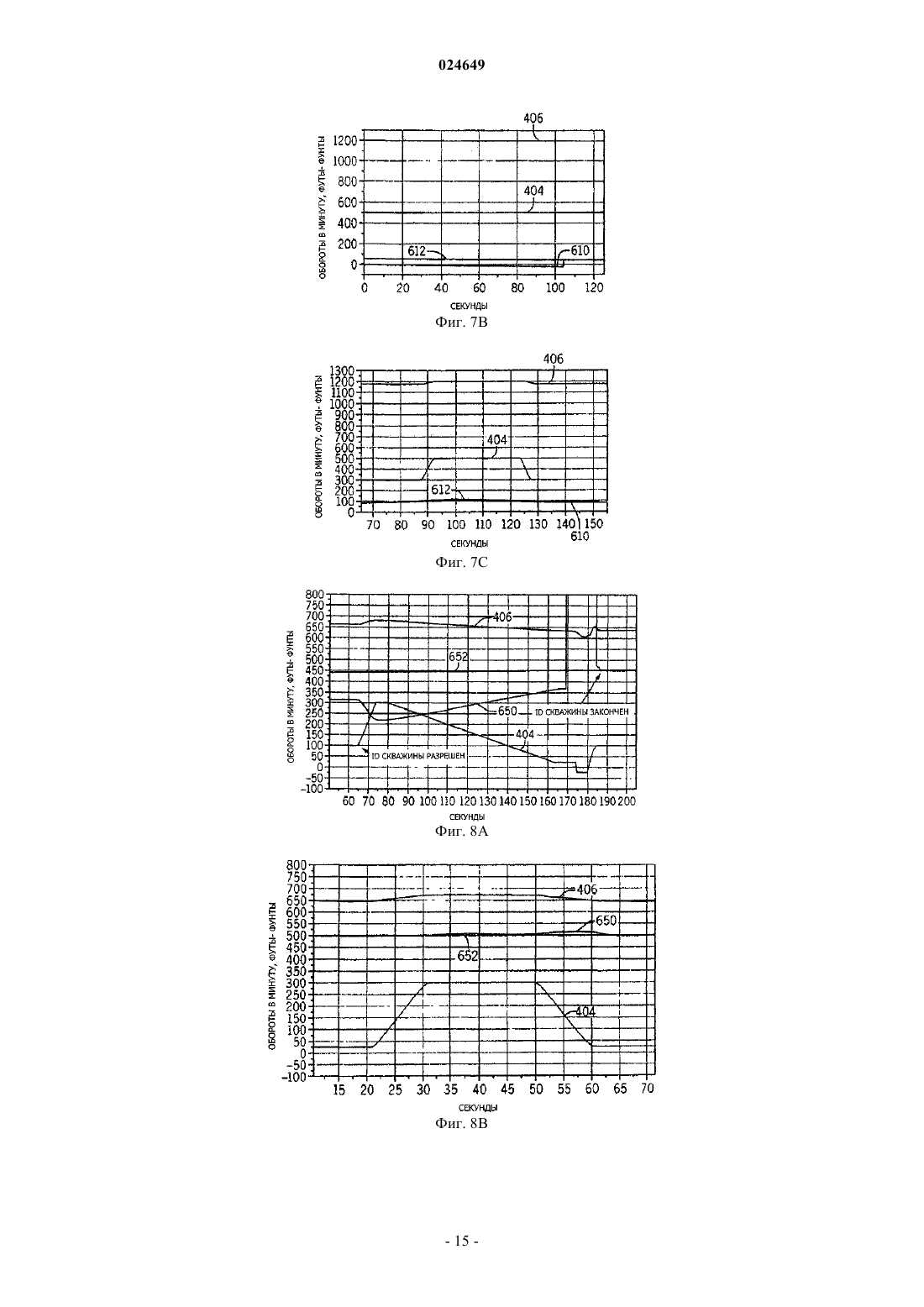
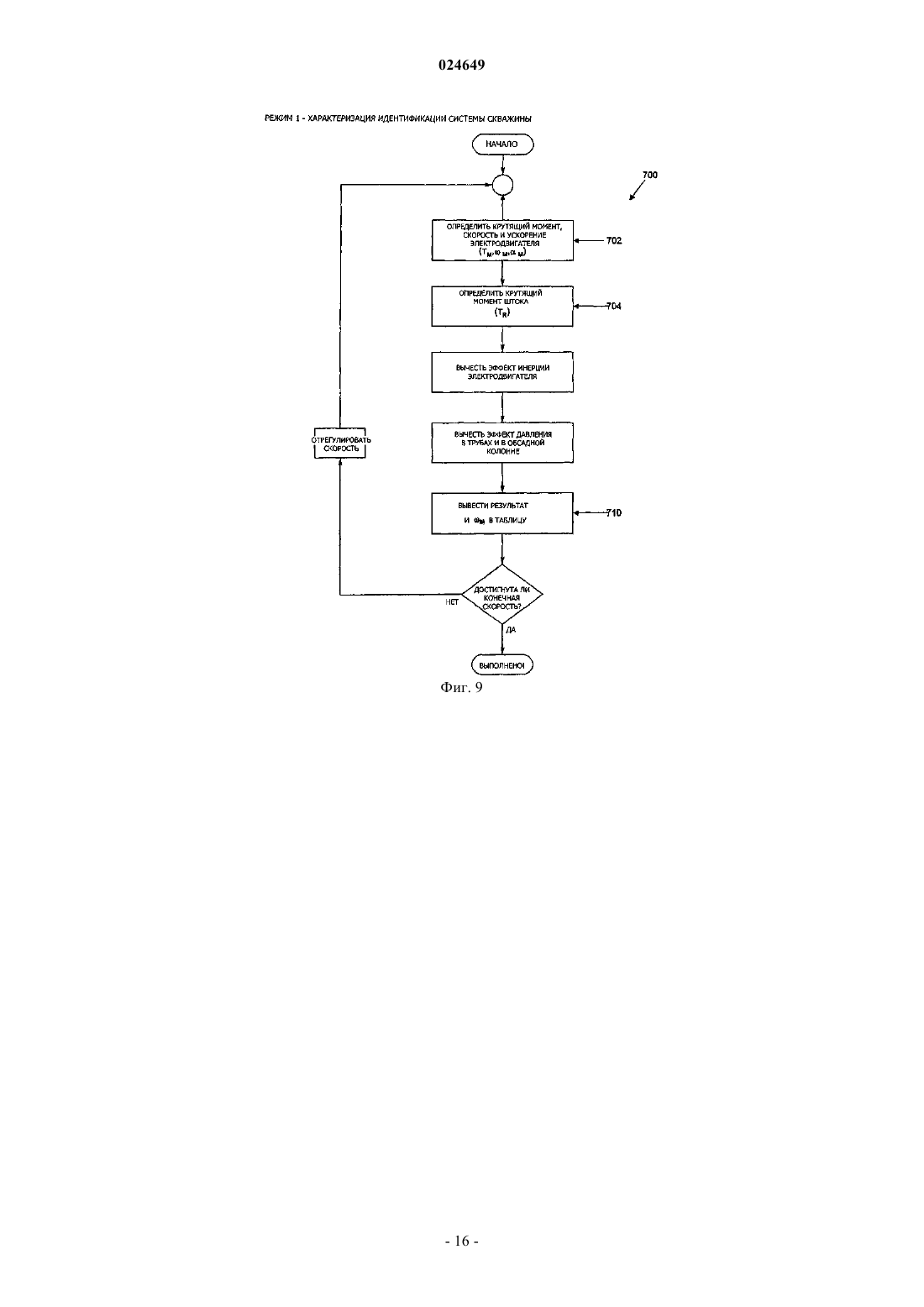
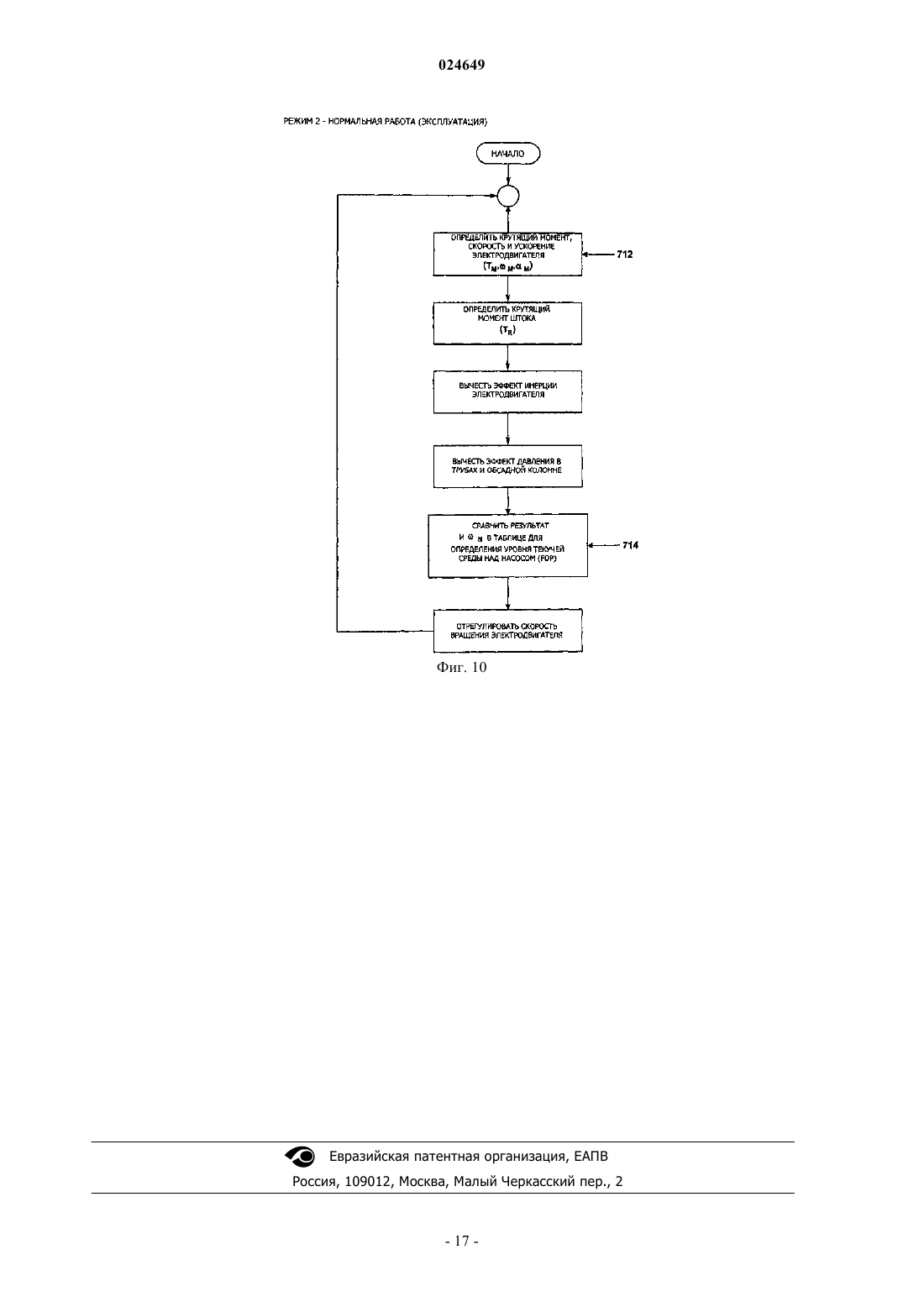
ОЦЕНКА УРОВНЕЙ ТЕКУЧЕЙ СРЕДЫ В СИСТЕМЕ ПОГРУЖНОГО ВИНТОВОГО НАСОСА Способ и устройство для управления насосной системой включают определение рабочего параметра электродвигателя, выполненного с возможностью привода насоса внутри скважины; определение рабочего параметра насоса на основе рабочего параметра электродвигателя; выполнение управлением насосом в первом режиме для определения характеристик насоса при требуемом уровне текучей среды; получение выходных данных первого режима на основе работы насоса в первом режиме; управление насосом во втором режиме на основе выходных данных первого режима; определение оценки уровня текучей среды в скважине на основе рабочего параметра электродвигателя и рабочего параметра насоса и регулирование скорости насоса на основе указанной оценки уровня текучей среды для поддержания требуемого уровня текучей среды. Область техники, к которой относится изобретение Настоящее изобретение в общем относится к насосной системе и, более конкретно, к способу и системе для оценки и управления уровнем текучей среды внутри скважины с насосной системой. Уровень техники Насосы обычно используются для транспортировки текучих сред с требуемым потоком и давлением из одного местоположения в другое или, в качестве альтернативы, для рециркуляции текучей среды в системе. Примеры таких вариантов применения включают в себя, но не ограничиваются этим, нефтяные скважины, газовые скважины, водяные скважины, ирригационные системы, системы нагрева и охлаждения, системы очистки сточных вод, муниципальные системы очистки воды, системы распределения и т.п. Различными рабочими параметрами насоса можно управлять для защиты насоса от повреждения,оптимизации работы насоса, повышения эффективности насоса и/или повышения производительности по текучей среде. Примеры рабочих параметров насоса включают в себя, например, скорость насоса,крутящий момент насоса, эффективность насоса, расход текучей среды, входное давление насоса и выходное давление насоса. Один или больше датчиков можно использовать внутри скважины или "на дне скважины" для непосредственного измерения рабочих параметров насоса. Во множестве вариантов применения размещение,требуемое для датчиков, является неудобным или труднодоступным и может потребовать, чтобы датчики были открыты для воздействия агрессивной среды, что, таким образом, снижает надежность системы. Кроме того, установка датчиков и стоимость технического обслуживания увеличивают общие затраты на насосную систему. Также, кроме того, замена или ремонт датчиков может потребовать остановки работы насоса. Поэтому стоимость установки, работы и технического обслуживания могут быть уменьшены, и общая производительность насосной системы и надежность могут быть улучшены благодаря устранению датчиков из скважины. Сущность изобретения В одном варианте осуществления предусмотрен способ определения оценочного уровня текучей среды в скважине без установки датчика внутри скважины, включающий погружной винтовой насос,установленный внутри скважины. Насос соединен с электрическим двигателем и контроллером. Способ включает в себя этапы определения рабочего параметра электрического двигателя и определения рабочего параметра насоса. Дополнительный этап включает в себя запись в таблицу соответствия, ассоциированную с контроллером, по меньшей мере одного значения крутящего момента насоса при определенной скорости насоса. Способ также включает в себя использование рабочего параметра электрического двигателя, рабочего параметра насоса, и значений таблицы соответствия, для получения с помощью контроллера оценочного уровня текучей среды внутри скважины при выполнении контроллером управления насосом с выбранной скоростью. В другом варианте осуществления насосная система включает в себя насос, выполненный с возможностью управления уровнем текучей среды внутри скважины, и электродвигатель, функционально соединенный с насосом и выполненный с возможностью привода насоса. Насосная система дополнительно включает в себя контроллер, который содержит модуль определения электродвигателя, модуль определения насоса, модуль определения уровня текучей среды, модуль первого режима, модуль второго режима и модуль регулирования. Модуль определения электродвигателя определяет рабочие параметры электродвигателя, такие как крутящий момент электродвигателя и скорость вращения электродвигателя. Модуль определения насоса определяет рабочий параметр насоса на основе по меньшей мере одного из рабочего параметра электродвигателя. Модуль определения уровня текучей среды определяет оценочный уровень текучей среды в скважине на основе рабочего параметра электродвигателя и рабочего параметра насоса. Модуль первого режима управляет насосом в первом режиме для генерирования выходных данных первого режима, включая в себя скорость насоса и значения крутящего момента взаимосвязанные с определенными значениями высоты текучей среды над насосом, и сохраняет такие данные в базе данных отображения, также называемой справочной таблицей. Модуль второго режима выполняет управление насосом во втором режиме с крутящим моментом и значением скорости насоса, которые сравнимы с крутящим моментом и значением скорости насоса в базе данных отображения. Модуль регулирования регулирует оценочный уровень текучей среды на основе значения крутящего момента насоса,полученного в первом и втором режимах. Контроллер изменяет один или больше рабочих параметров электродвигателя и рабочих параметров насоса для поддержания уровня текучей среды в скважине на заданном значении установочной точки. В еще одном, другом варианте осуществления контроллер насоса включает в себя модуль определения электродвигателя. Модуль определения электродвигателя выполнен с возможностью определения рабочих параметров электродвигателя для электродвигателя, выполненного с возможностью управления насосом в скважине. Рабочие параметры электродвигателя содержат крутящий момент электродвигателя и скорость вращения электродвигателя. Модуль определения насоса функционально соединен с модулем определения электродвигателя и выполнен с возможностью определения рабочих параметров насоса на основе по меньшей мере одного рабочего параметра электродвигателя. Рабочие параметры насоса включают в себя крутящий момент насоса и скорость насоса. Модуль определения уровня текучей среды функционально соединен с модулем определения насоса и выполнен с возможностью определения оценочного уровня текучей среды в скважине. Модуль определения текучей среды включает в себя модуль первого режима, выполненный с возможностью генерирования выходных данных первого режима, на основе работы насоса в первом режиме. Такие данные включают в себя скорость насоса и значения крутящего момента насоса, ассоциированные со специфичными значениями уровня текучей среды над насосом, и такие данные сохраняют в базе данных отображения. Модуль определения текучей среды дополнительно содержит модуль второго режима, функционально соединенный с модулем первого режима, в котором модуль второго режима выполнен с возможностью управления насосом во втором режиме для определения оценочного уровня текучей среды. В модуле второго режима используется текущая скорость и значения крутящего момента насоса по сравнению со скоростью и значениями крутящего момента насоса в базе данных отображения. Модуль регулирования функционально соединен с модулем определения уровня текучей среды. Модуль регулирования выполнен с возможностью регулирования скорости насоса для поддержания оценочного уровня текучей среды на заданном значении установочной точки. Другие аспекты, цели и преимущества изобретения будут более понятны из следующего подробного описания изобретения, которое требуется рассматривать совместно с приложенными чертежами. Краткое описание чертежей Приложенные чертежи, встроенные и формирующие часть описания, иллюстрируют несколько аспектов настоящего изобретения и вместе с описанием используются для пояснения принципов изобретения. На чертежах: на фиг. 1 показано частичное представление скважины в варианте осуществления насосной системы, которая управляет работой насоса, когда для него выполняют привод в скважине; на фиг. 2 подробно показана блок-схема варианта осуществления контроллера насоса, взаимосвязанного с насосной системой по фиг. 1; на фиг. 3 показана подробная блок-схема различных компонентов контроллера насоса по фиг. 1 и 2; на фиг. 4 показан график, иллюстрирующий формы колебаний, которые представляют оценочный уровень текучей среды и фактический уровень текучей среды, оба, как функция различных состояний скорости и крутящего момента; на фиг. 5A-5C показаны графики, иллюстрирующие формы колебаний, которые представляют результаты работы модуля регулирования; на фиг. 6 показана блок-схема варианта осуществления алгоритма, воплощенного в контроллере насоса; на фиг. 7A-7C показаны графики, иллюстрирующие формы колебаний, которые представляют взаимосвязь оценочного уровня текучей среды с фактическим уровнем текучей среды во время (7A) и после(7B, 7C) первого режима работы; на фиг. 8A и 8B показаны графики, иллюстрирующие формы колебаний, которые представляют взаимосвязь оценочного уровня текучей среды с фактическим уровнем текучей среды во время (8A) и после (8B) первого режима работы; на фиг. 9 схематично представлена блок-схема последовательности операций одного варианта осуществления способа, воплощенного контроллером насоса для режима 1 - получение характеристик скважины для системы. на фиг. 10 схематично показана блок-схема последовательности операций способа, воплощенного контроллером насоса для режима 2 - нормальная работа (эксплуатация). В то время как изобретение будет описано со ссылкой на определенные предпочтительные варианты осуществления, здесь отсутствует намерение ограничивать его этими вариантами осуществления. И,наоборот, предполагается, что будут охвачены все альтернативы, модификации и эквиваленты как включенные в пределы сущности и объема раскрытия, определенные приложенной формулой изобретения. Подробное описание изобретения На фиг. 1 показан вариант осуществления насосной системы 100, которая управляет работой насоса 102, когда ее приводят в действие внутри скважины 104. Скважина 104, показанная в варианте осуществления на фиг. 1, представляет собой нефтяную скважину, с помощью которой нефть добывают из подземной формации 106. Следует понимать, однако, что насосная система 100 может работать с любыми другими типами скважин, такими как, например, газовая скважина, водяная скважина и т.п. Скважина 104 включает в себя внутреннюю насосно-компрессорную колонну 108 и внешнюю обсадную колонну 110. Как показано, внутренняя насосно-компрессорная колонна 108, которая может продолжаться от уровня 112 земли до уровня ниже уровня земли, включает в себя выходное отверстие 114 для текучей среды, расположенное выше уровня 112 земли. В варианте осуществления, показанном на фиг. 1, внутренняя насосно-компрессорная колонна 108 продолжается приблизительно на глубину 1000-5000 футов или больше ниже уровня 112 земли. Нижняя часть внутренней насосно-компрессорной колонны 108 обычно заканчивается ниже подземной формации 106. Внешняя обсадная колонна 110 включает в себя выходное отверстие 116 для газа и множество перфораций 118, которые позволяют нефти из подземной формации 106 поступать в ствол скважины. Как показано на фиг. 1, выходное отверстие 116 для газа расположено на верхнем конце внешней обсадной колонны 110 выше уровня 112 земли. Следует понимать, что вода может быть смешана с нефтью и насос 102 может использоваться для других жидкостей. Насос 102 также может использоваться только для перекачки воды. Насосная система 100 включает в себя насос 102, систему 120 электрического привода, коробку 122 передач, электродвигатель 126 и контроллер 128. В некоторых вариантах осуществления коробка передач не используется. Как показано в варианте осуществления на фиг. 1, насос 102 установлен на нижнем конце внутренней насосно-компрессорной колонны 108 и включает в себя элемент 130 насоса, соединенный с колонной 132 штанг штока насоса. Колонна 132 штанг штока насоса продолжается вдоль оси через внутреннюю насосно-компрессорную колонну 108 и вращается через коробку 122 передач электродвигателем 126 во время работы для откачки. В варианте осуществления на фиг. 1 элемент 130 насоса представляет собой элемент 130 насоса винтового типа, установленный внутри корпуса насоса на нижнем конце внутренней насоснокомпрессорной колонны 108. Следует, однако, понимать, что элемент 130 насоса может иметь любую требуемую форму, которая позволяет выполнять привод во вращение насоса 102 ниже уровня 112 земли. Насос 102, показанный на фиг. 1, представляет собой погружной винтовой насос (РСР). Необязательный обратный клапан 134 может быть расположен либо на стороне 136 всасывания, либо на стороне 138 выпуска из насоса 102 для уменьшения обратного потока текучей среды, когда насос 102 не работает. Система 120 электрического привода обеспечивает энергию для привода электродвигателя 126. В качестве примера система 120 электрического привода может представлять собой привод с переменной скоростью, который включает в себя обратный преобразователь для преобразования мощности постоянного тока в мощность переменного тока для привода электродвигателя 126. Коробка 122 передач преобразует входящие значения крутящего момента и скорость электродвигателя в соответствующие выходные значения крутящего момента и скорости для привода колонны 132 штанг штока насоса и элемента 130 насоса, соединенного с ней. Колонна 132 штанг штока насоса непосредственно соединена с валом электродвигателя 126 или соединена с ним через коробку 122 передач или аналогичный механизм понижения скорости. Во время операции перекачки электродвигатель 126 вращает колонну 132 штанг штока насоса. В варианте осуществления по фиг. 1 электродвигатель 126 представляет собой трехфазный индукционный электродвигатель переменного тока, разработанный для его работы с линейным напряжением от приблизительно 230 до 690 В переменного тока, и который развивает приблизительно 5-250 лошадиных сил, в зависимости от пропускной способности и глубины насоса 102. Однако следует понимать,что другие типы и виды электродвигателей можно использовать в том виде, как они есть, например синхронный электродвигатель. Электроэнергия для системы 120 электрического привода и контроллера 128 может быть получена путем выпрямления входящей мощности переменного тока от провайдера электроэнергии или генератора. Контроллер 128 управляет системой 120 электрического привода. В частности, контроллер 128 передает команды в систему 120 электрического привода для управления работой электродвигателя 126 и насоса 102 дня поддержания уровня текучей среды внутри скважины 104 на требуемом уровне текучей среды. Как более подробно будет описано ниже, контроллер 128, расположенный над уровнем 112 земли,выполнен с возможностью отслеживать и управлять работой насоса 102, который расположен ниже уровня 112 земли, без использования датчиков, расположенных "внутри скважины" или в пределах скважины 104. При выполнении привода насоса 102 во время операции перекачивания в столбе текучей среды накапливается потенциальная энергия из-за работы привода насоса 102, который перемещает текучую среду в направлении вверх, формируя, таким образом, обратное давление в колонне 132 штанг штока насоса. На фиг. 2 контроллер 128 включает в себя модуль 200 интерфейса электродвигателя, устройство 204 обработки и ассоциированный модуль 202 сохранения данных. Контроллер 128 отслеживает работу насоса для определения неоднородности, например напорного давления, потока или других состояний,которые могут повредить насос 102. Например, контроллер 128 может защищать от кавитации, работы насоса с перекрытым сливом и минимальных условий потока путем детектирования и идентификации таких условий прежде, чем они возникнут, и управление работой насоса, для исключения этих состояний. Модуль 200 интерфейса электродвигателя включает в себя устройства для соединения контроллера 128 с другими компонентами в насосной системе 100. В частности, модуль 200 интерфейса электродвигателя включает в себя датчик 206 тока, датчик 208 напряжения и устройство 210 ввода-вывода (I/O). Датчик 206 тока и датчик 208 напряжения соединены с электродвигателем 126 для определения тока электродвигателя и напряжения электродвигателя соответственно. В одном варианте осуществления как датчик 206 тока, так и датчик 208 напряжения включают в себя цепи, соединенные с обмотками электродвигателя для определения тока электродвигателя, напряжения и измерения потока. Следует понимать,что датчик 206 тока и датчик 208 напряжения могут включать в себя другие преобразователи и/или схемы, выполненные с возможностью измерения значения тока и напряжения. Датчик тока и датчик напряжения представляют собой обычные электрические компоненты, и поэтому их работа не описана здесь дополнительно. Контроллер 128 принимает определенный ток электродвигателя и значения напряжения электродвигателя через соответствующее устройство 210 ввода-вывода (I/O). Устройство 210 I/O может включать в себя клавиатуру, устройство съемного носителя и аналого-цифровой преобразователь для преобразования аналоговых измерений в цифровой формат, пригодный для использования модулем 202 сохранения данных и устройство 204 обработки контроллера 128. Модуль 202 сохранения данных может включать в себя устройства, которые сохраняют программы,определенные параметры электродвигателя и другие данные, к которым получает доступ устройство 204 обработки для отслеживания и управления работой насоса 102. В частности, модуль 202 сохранения может включать в себя энергозависимое и/или энергонезависимое запоминающее устройство, такое как,например, RAM, ROM, EEPROM, флэш и т.п. Модуль 202 сохранения может включать в себя дополнительные особенности и функции. Например, модуль 202 сохранения может включать в себя съемные и/или несъемные устройства, включая в себя, но без ограничений этим, магнитные или оптические диски, ленты и т.п. Как известно, компьютерный носитель информации включает в себя энергозависимые и энергонезависимые, съемные и несъемные носители информации, воплощенные в любой способ или технологию для сохранения информации, такой как, например, считываемые компьютером инструкции или процедуры, структуры данных, объекты, компоненты и/или другие типы данных. Устройство 204 обработки может включать в себя любой тип вычислительного устройства, такой как, например, персональный компьютер (PC), переносной компьютер, портативный карманный компьютер и т.п. На фиг. 3 устройство 204 обработки включает в себя модуль 300 определения электродвигателя,модуль 302 определения насоса, модуль 304 определения уровня текучей среды, модуль 308 первого режима, модуль 310 второго режима и модуль 312 регулирования. Модуль 312 регулирования использует данные, получаемые из модуля 308 первого режима и модуля 310 второго режима, для управления уровнем текучей среды в кожухе 110. Оценка уровня текучей среды определяется в модуле 304 определения уровня текучей среды, используя входные данные, полученные в ходе работы насоса 102, во время операции первого режима. Два набора данных, получаемых из модулей первого и второго режима 308, 310, используются для оценки уровня текучей среды в скважине 104 (см. фиг. 9 и 10). Модуль 308 первого режима (см. фиг. 9) управляет насосом 102 в первом режиме для получения характеристик насоса 102 при различных скоростях для заданного уровня текучей среды. Другими словами, модуль 308 первого режима калибрует процессор 204 и строит таблицу скорости электродвигателя и крутящего момента, по существу, для постоянного уровня текучей среды. В одном варианте осуществления модуль 308 первого режима управляет скоростью и/или вращением насоса 102, используя пропорционально-интегральную (PI) функцию. Насосом 102 управляют в первом режиме, который также называется режимом идентификации, в котором калибруют систему 100. Модуль 308 первого режима управляет насосом 102 на разных скоростях (RPM) с известным, измеренным значением уровня текучей среды над насосом (FOP). FOP может быть получен несколькими путями, например используя устройство акустического зондирования. Скорость и крутящий момент насоса 102 измеряют с различными скоростями для построения отображения скорости на крутящий момент для заданного FOP. Используют множество значений FOP и значения скорости и значения крутящего момента добавляют к базе данных отображения (см. фиг. 9) При такой процедуре насосом 102 управляют в направлении вперед, например по часовой стрелке, для всех измерений. Работой насоса 102 также можно управлять для получения оценочного значения трения для трения,которое возникает между движущимися частями во время работы насоса. В частности, насос 102 работает в направлении, противоположном направлению, в котором насос 102 работал в режиме идентификации. Такое вращение в обратном направлении насоса 102 известно как обратное вращение. При обратном управляемым вращении насосом 102 может быть определено оценочное значение трения, в результате чего получают абсолютное измерение FOP, без необходимости акустической калибровки. Оценка значения трения включает в себя значение кулоновского трения насоса во время работы насоса 102. Насос 102 также работает во втором режиме, также называемом рабочим режимом (см. фиг. 10). Модуль 310 второго режима управляет насосом 102 для обеспечения эксплуатации. Насос 102 работает для откачки текучей среды из скважины, и скорость и крутящий момент насоса 102 измеряют, определяя ток электродвигателя насоса и напряжение, используя соответствующие датчики (206, 208). Измеряемое значение крутящего момента сравнивают со значением крутящего момента для этой измеренной скорости, содержащимся в базе данных отображения, полученной во время работы в первом режиме. Если рабочий крутящий момент ниже, чем значение крутящего момента в базе данных отображения, предполагается, что FOP увеличился. И, наоборот, если значение крутящего момента больше, чем значение крутящего момента в базе данных отображения, предполагается, что FOP уменьшился. FOP рассчитывают в контроллере 128 насоса, используя измеренное значение крутящего момента и данные в базе данных отображения. Рассчитывают разницу между оценкой FOP и целевым значением установочной точки, и скорость насоса регулируют с помощью модуля 312 регулирования, по существу, в режиме реального времени,для управления FOP заданного значения целевой установочной точки. Значение целевой установочной точки обычно устанавливают по входной команде оператора системы 100, используя устройство 210 ввода-вывода. "По существу, режим реального времени" означает настолько быстро, как может быть определено пользователем насосной системы 100 На фиг. 9 показана блок-схема последовательности операций одного варианта осуществления способа 700, воплощенного с использованием контроллера 128 насоса для управления насосной системой 100. В блоке 702 контроллер 128 насоса определяет рабочий параметр двигателя на основе измеренных параметров, ассоциированных с электродвигателем 126, который расположен выше уровня 112 земли. Например, контроллер 128 насоса определяет крутящий момент электродвигателя и значение скорости на основе определенных измеренных значений для тока электродвигателя и напряжения электродвигателя, полученных выше уровня 112 земли. Управление затем переходит к блоку 704, в котором контроллер 128 насоса определяет рабочий параметр насоса, такой как крутящий момент штока насоса на основе рабочего параметра электродвигателя. Рабочий параметр насоса в некоторых обстоятельствах может включать в себя скорость насоса, крутящий момент насоса, эффективность насоса, расход текучей среды,высоту нагнетания насоса, давление напора насоса, давление всасывания насоса, выходное давление насоса и т.п. В одном варианте осуществления контроллер 128 насоса определяет скорость насоса и крутящий момент насоса, используя математическую модель компонентов насосной системы 100. В блоке 710 контроллер 128 насоса генерирует выходные данные первого режима на основе работы насоса 102 в первом режиме. Выходные данные в первом режиме включают в себя значения скорости насоса и крутящего момента насоса как часть справочной таблицы. Контроллер 128 насоса также генерирует выходные данные 714 второго режима на основе работы насоса 102 во втором режиме. Блок 712, в котором контроллер 128 насоса управляет насосом 102 во втором режиме, основан на выходных данных первого режима. Когда насосная система 100 работает в первом режиме, фиг. 9, насосная система 100 получает данные характеристик для насосной системы. Режим 1 также называется "идентификационным режимом", в котором система 100 выполняет калибровку. В первом режиме система строит таблицу данных, когда насос 102 работает на разных скоростях с известным измеренным значением уровня текучей среды над насосом (FOP). Как обозначено выше, FOP может быть определен с помощью акустического датчика,работающего в устье скважины. Скорость и крутящий момент (702, 704) измеряют на разных скоростях для определения отображения (таблицы данных) скорости в зависимости от крутящего момента для заданного FOP. В некоторых ситуациях, в случае необходимости, определяемых оператором, насос работает в обратном направлении для попытки более точно определить, какой из компонентов крутящего момента насоса связан с трением в насосе. Многие операторы не запускают насос в обратном направлении. Когда насосная система 100 работает во втором режиме, насос 102 работает в его нормальном состоянии, также называемом "рабочим режимом" (фиг. 10). Скорость и крутящий момент электродвигателя 126 измеряют и крутящий момент сравнивают с крутящим моментом в таблице данных, полученной в режиме калибровки режима 1 для измеренной скорости. Если рабочий крутящий момент меньше, чем значение крутящего момента в таблице данных, предполагают, что насос поднимает текучую среду на меньшее расстояние, другими словами, увеличивается FOP. И, наоборот, если рабочий крутящий момент больше, чем значение крутящего момента в таблице данных, предполагают, что насос поднимает текучую среду на большее расстояние, другими значения целевой установочной точки. Значение целевой установочной точки вводит оператор насосной системы 100. Хотя устройство 204 обработки и модуль 202 сохранения были описаны как локальные устройства,связанные с одним контроллером 128 насоса, следует также понимать, что контроллер 128 может включать в себя множество устройств обработки и модулей сохранения, распределенных дистанционно друг с другом и выполненных с возможностью обмена данными через проводную или беспроводную сеть передачи данных, такую как, например, локальная вычислительная сеть (LAN), глобальная сеть (WAN), беспроводная сеть передачи данных и т.п. Аналогично, хотя модуль 300 определения электродвигателя, модуль 302 определения насоса, модуль 304 определения уровня текучей среды, модуль 306 определения установочной точки, модуль 308 первого режима, модуль 310 второго режима и модуль 312 регулирования были описаны как отдельные дискретные модули устройства 202 обработки функция нескольких или всех модулей 300-312 может быть объединена, если это требуется. Устройство 204 обработки включает в себя математические модели различных компонентов насосной системы 100, таких как, например, система 120 привода, электродвигатель 126, колонна 132 штанг штока насоса, насос 102, насосно-компрессорная колонна 108, внешняя обсадная колонна 110, перекачиваемая текучая среда, резервуар и т.п., для моделирования операции перекачки и генерирования выходных данных. Модели элементов насосной системы 100 работают в режиме реального времени. В результате эти модели можно использовать для детектирования и идентификации соответствующих пределов и внедрения соответствующих стратегий управления. Кроме того, устройство 204 обработки также может использовать спецификации производителя компонентов, информацию, относящуюся к скважине 104, и параметры полевой установки для отслеживания работы насосной системы 100. Кроме того, идентификационные процедуры могут быть воплощены с помощью устройства 204 обработки для автоматического определения параметров системы, зависимых от установки, взаимосвязанных с электродвигателем 126, колонны 132 штанг штока насоса и насоса 102. Модели моделируют тепловое, механическое, электрическое и гидравлическое поведение насосной системы 100 для управления процессом перекачки с большей точностью. Модуль 300 определения электродвигателя определяет рабочий параметр электродвигателя для электродвигателя 126. Рабочий параметр электродвигателя может включать в себя динамические переменные, обозначающие работу электродвигателя, такие как, например, крутящий момент электродвигателя, скорость, быстродействие, угол ротора и т.п. В частности, модуль 300 определения электродвигателя принимает определенные параметры из модуля 200 интерфейса электродвигателя (например, ток электродвигателя и напряжение электродвигателя) и определяет соответствующие значения крутящего момента электродвигателя и скорости электродвигателя. В одном варианте осуществления модуль 300 определения электродвигателя определяет крутящий момент электродвигателя по сигналам тока и напряжению электродвигателя, генерируемым преобразователями, соединенными с электродвигателем. Аналогично, модуль 300 определения электродвигателя определяет скорость электродвигателя с помощью соответствующих преобразователей, соединенных с электродвигателем. В результате использования такой самоопределяющейся конфигурации модуль 300 определения электродвигателя может определять практически мгновенные оценки крутящего момента электродвигателя и скорости электродвигателя, например, с частотой приблизительно 1000 раз/с. Модуль 302 определения насоса определяет рабочий параметр насоса, взаимосвязанный с насосом 102, на основе рабочего параметра электродвигателя. Рабочий параметр насоса обычно включает в себя скорость насоса, крутящий момент насоса и т.п. Модуль 304 определения уровня текучей среды определяет оценочный уровень текучей среды в скважине 104 на основе измерений, связанных с электродвигателя 126, полученных с уровня 112 выше земли. В частности, модуль 304 определения уровня текучей среды устраняет необходимость размещения датчика уровня, тензометрического датчика или другого датчика расхода "на дне скважины" или внутри скважины 104, которые, в противном случае, потребовали бы размещения датчиков на сотни или тысячи футов ниже уровня 112 земли. Кроме того, условия внутри скважины 104 могут быть неблагоприятными для датчика, что может вызывать частые отказы датчика. В результате работы по перекачке может потребоваться приостанавливать или останавливать для извлечения насоса 102 и соответствующих труб таким образом, чтобы можно было получить доступ к неисправному датчику для ремонта или замены. Модуль 304 определения уровня текучей среды определяет оценочный уровень текучей среды на основе рабочего параметра электродвигателя и рабочего параметра насоса, которые получают по результатам измерений, выполняемым выше уровня 112 земли, таких как, например, ток электродвигателя и напряжение электродвигателя. Во время работы в режиме один контроллер 128 снижает скорость электродвигателя 126 с максимальной скорости до минимальной скорости и затем до нормальной рабочей скорости для получения множества значений крутящего момента электродвигателя при разных скоростях электродвигателя. Это может выполняться через периодические интервалы или однократно. Модуль 304 определения уровня текучей среды впоследствии определяет оценочный уровень текучей среды на основе рабочих параметров электродвигателя, например, скорости электродвигателя и крутящего момента электродвигателя. На фиг. 4 представлена графическая иллюстрация формы колебаний оценочного уровня 400 текучей среды(измеряемого в футах выше насоса или FOP) и формы колебаний фактического уровня 402 текучей среды (измеряемых в FOP), и как функция различной частоты 404 вращения электродвигателя, и значения крутящего момента 406 электродвигателя. Как описано выше, модуль 304 определения уровня текучей среды определяет оценочный уровень текучей среды путем сравнения рассчитанного крутящего момента во время второго режима электродвигателя с получением крутящего момента для этой скорости электродвигателя во время первого режима работы. Если уровень текучей среды в скважине 104 падает слишком низко, может возникнуть нежелательное состояние остановки насоса или образование газовой пробки. Состояние остановки насоса возникает,когда уровень текучей среды в скважине 104 падает до точки, где входное отверстие насоса больше не получает постоянный приток в основном жидкой текучей среды из скважины 104. Аналогично, в скважине 104, в которой произошел захват газа в текучей среде, состояние влияния газа может возникнуть,когда уровень текучей среды понизился до такого низкого уровня, что давление текучей среды во впускном отверстии насоса падает ниже температуры начала кипения текучей среды. В результате высвобождается газ, который может попадать в насос 102. Модуль 304 определения уровня текучей среды выполнен с возможностью поддержания достаточно высокого уровня текучей среды для предотвращения отключения насоса или образования газовой пробки. Однако в случае возникновения либо отключения насоса, либо состояния влияния газа работа по перекачке или действия насоса становится нестабильной, в результате приводя к существенному уменьшению потока текучей среды и соответствующему уменьше-6 024649 нию крутящего момента насоса и тока электродвигателя. Поэтому во время такого возникновения состояния отключения насоса или влияния газа работа насоса может быть уменьшена или приостановлена до тех пор, пока не будет устранено состояние, которое вызвало отключение насоса или состояние влияния газа. На фиг. 5A-5C показаны графические иллюстрации того, как модуль регулирования управляет взаимосвязью оценочного уровня текучей среды с фактическим уровнем текучей среды, по мере изменения требуемого уровня 500 текучей среды. В частности, на фиг. 5A показан оценочный уровень 502 текучей среды относительно фактического уровня 504 текучей среды, когда требуемый уровень 500 текучей среды составляет 100 FOP. На фиг. 5B показан оценочный уровень 502 текучей среды относительно фактического уровня 504 текучей среды, когда требуемый уровень 500 текучей среды меняется от 100 FOP до 50 FOP. На фиг. 5C показан оценочный уровень 502 текучей среды относительно фактического уровня 504 текучей среды, когда требуемый уровень 500 текучей среды меняется от 50 FOP до 100 FOP. На фиг. 6 показан алгоритм, воплощенный в модуле 308 второго режима, для оценки уровня текучей среды. Перед N1 поступает сигнал, помеченный как FILT, TROD. Это означает крутящий момент штока на поверхности. Крутящий момент штока на поверхности равен крутящему моменту электродвигателя, помноженному на передаточное число коробки передач поверхностного насосного модуля (и пропущенный через фильтр низкой частоты). Крутящий момент электродвигателя определяют с помощью сигналов тока и напряжения электродвигателя. Выход N1 на фиг. 6 представляет текущее значение крутящего момента штока на поверхности (FILTTROD), который отсоединен от эффектов давления внутри обсадной колонны. Выход N1 представляет собой крутящий момент на поверхности минус количество [(Давление в колонне - Давление внутри обсадной колонны)Смещение насоса]. Выход N2 представляет крутящий момент N1, отсоединенный от эффектов ускорения и замедления нагрузки. Выход N2 представляет собой крутящий момент N1 минус угловое ускорение, умноженное на инерцию вращения (RodIT) - Выход N2 называется "TWELLID" который представляет собой "Крутящий момент идентификатора скважины". Идентификатор скважины представляет собой значение крутящего момента, программируемое в справочной таблице идентификатора скважины, заполненной во время испытаний идентификатора скважины. Крутящий момент скважины ID также используется для определения основного крутящего момента подъема скважины ID. Основной крутящий момент подъема скважины ID представляет собой крутящий момент, требуемый для подъема текучей среды во время испытаний скважины ID. Другими словами, он представляет собой крутящий момент, требуемый для подъема текучей среды для заданного уровня текучей среды в обсадной колонне во время выполнения теста скважины ID. В идеале, это значение представляет только гидравлический крутящий момент для подъема текучей среды. (На практике это значение, однако, может содержать другие фрикционные компоненты). Это значение представляет собой базовую линию, хотя практически относительную, начальную точку, с которой выполняют сравнение в более позднюю дату, когда требуется определить уровень текучей среды. Основной крутящий момент подъема скважины ID определяют одним из двух способов, в зависимости от того, разрешено или нет выполнять тест скважины ID при обратном вращении насоса. Если разрешено выполнять тест скважины ID при обратном вращении насоса, характеристику, называемую основным крутящим моментом трения насоса, определяют как половину измеренного крутящего момента при медленном движении вперед минус измеренный крутящий момент при медленном движении при вращении назад. Основной крутящий момент подъема скважины ID затем рассчитывают при работе на малой скорости, получая выход N2 минус основной крутящий момент трения. (Назначение этого состоит в том, чтобы отключить кулоновское трение насоса от измеренного крутящего момента насоса). Если скважины ID не разрешено вращать в обратном направлении, основной крутящий момент трения насоса рассчитывают приблизительно, используя данные стендовых испытаний насоса "Номинальный подъем" и "Крутящий момент при номинальном подъеме". В частности, основной крутящий момент трения насоса равен крутящему моменту при стендовых испытаниях при номинальном подъеме минус теоретический крутящий момент гидравлической текучей среды при номинальном подъеме. Теоретический крутящий момент гидравлической текучей среды при номинальном подъеме рассчитывают путем умножения давления при номинальном подъеме насоса на высоту нагнетания насоса. Для значения скважины ID без использования вращения в обратную сторону будет не доставать специфичных функций трения, которые не включены в данные стендовых испытаний. С другой стороны,в тесте скважины ID с обратным вращением может не доставать изменений текучей среды внутри обсадной колонны во время испытаний скважины ID. (Уровень текучей среды внутри обсадной колонны предполагают относительно постоянным во время испытаний скважины ID). Ввиду этих ошибок, может потребоваться, чтобы уровень текучей среды быть откалиброван, возможно, используя портативное акустическое устройство. Поскольку со временем происходит износ насоса, также может потребоваться периодическая повторная калибровка (возможно, порядка несколько раз в год).N3 представляет собой разность между текущим значением крутящего момента скважины ID и значением из справочной Таблицы для текущей скорости работы. Другими словами, его выход представляет собой разность между текущим крутящим моментом и крутящим моментом из справочной таблицы, соответствующим текущей скорости. Если, например, текущий уровень текучей среды внутри обсадной колонным будет таким же, какой был при построении таблицы скважины ID. тогда выход N3, по существу, будет равен нулю (при любой скорости). Исходя из этого, читатель может видеть возможность отсоединения от скорости и соответствующие побочные эффекты, такие как вязкий насос и трение текучей среды.N4 представляет собой сумму N3, выводимую из ранее описанного основного крутящего момента подъема скважины ID. Выход N4 идеально представляет крутящий момент, требуемый для подъема текучей среды для текущего уровня текучей среды внутри обсадной колонны (учитывается только крутящий момент для гидравлического подъема), но на практике может быть несколько смещен не идентифицированными компонентами крутящего момента, такими как ошибки трения штока или насоса в значении основного крутящего момента на подъем скважины ID. Выход N5 представляет крутящий момент, необходимый для подъема текучей среды для текущего уровня текучей среды в обсадную колонну (только крутящий момент для гидравлического подъема), называемый крутящим моментом для перекачивания текучей среды (FLUID TP). N5 представляет собой сумму выхода N4 со смещением на крутящий момент калибровки уровня текучей среды. Смещение крутящего момента калибровки уровня текучей среды определяют во время калибровки уровня текучей среды (например, с помощью портативного акустического устройства) и используют для компенсации возможного смещения, получаемого из-за не идентифицированных компонентов крутящего момента, упомянутых в предыдущем абзаце. Смещение крутящего момента калибровки уровня текучей среды может быть необходимым, если не было разрешено выполнить тест скважины ID с обратным вращением, в результате чего, получают ошибки значений основного крутящего момента подъема скважины ID (который рассчитывается по данным стендового тестирования насоса, которые не включают в себя члены, представляющие трение штока и потока текучей среды). Непосредственно перед N6, крутящий момент насоса, из-за текучей среды делят на высоту нагнетания насоса, в результате чего получают дифференциальное давление насоса, требуемое для подъема только текучей среды, которое обозначено как FLUID PDIFF. N6 представляет собой количество [Глубина насоса (XP), умноженная на Плотность (T) текучей среды в колонне труб] - PDIFF текучей среды. ВыходN6 представляет компонент входного давления насоса, получаемый исключительно из-за веса высоты текучей среды в обсадной колонне, который обозначается как FLUID PIP. Непосредственно перед N7 FLUID PIP делят на плотность текучей среды в обсадной колонне (C). Результат представляет собой уровень текучей среды в обсадной колонне над насосом, который обозначен как FOP. N7 представляет собой вычитание FOP из глубины насоса (ХР), что представляет собой уровень текучей среды на поверхности. Для специалиста в области техники управления РСР будет понятна концепция раскрытия, и любые отличия между текущим крутящим моментом штока насоса и крутящим моментом, представленным в таблице для текущей скорости, связаны с изменением уровня текучей среды в обсадной колонне относительно уровня, поддерживавшегося во время испытаний скважины ID, позволяя, таким образом, определять текущий уровень текучей среды. Оценка уровня текучей среды на этом заканчивается Может быть желательным, в качестве альтернативы, выразить уровень текучей среды над насосом в обсадной колонне, как входное давление насоса. N8 представляет собой сумму PIP текучей среды и давления (PC) внутри обсадной колонны, в результате чего получают давление PIP на входе насоса. Также возможно, чтобы контроллер выполнял оценку фактического давления на выходе насоса, а также фактического дифференциального давления насоса. Это осуществляется с помощью блоков, взаимосвязанных с N9,10,11 по фиг. 6.N11 представляет собой суммирование членов в способе (здесь не описано) для оценки падения напора, связанного с трением потока внутри труб. Будучи связанным с давлением внутри труб и обсадной колонны, выход N11 представляет давление, требуемое для преодоления этих эффектов. Это давление умножают на высоту нагнетания насоса для получения эквивалентного крутящего момента. В N10 этот эквивалентный крутящий момент суммируют с крутящим моментом текучей среды насоса для получения оценочного фактического крутящего момента насоса (TP). Результат делят на высоту нагнетания насоса, получая оценочное фактическое дифференциальное давление насоса (PDIFF). N9 представляет собой сумму давления на входе насоса и дифференциального давления насоса, в результате чего, получают оценочное фактическое давление нагнетания насоса (PD). Различные входные параметры и получаемые выходные величины, используемые для определения уровня текучей среды внутри скважины, выражаются следующим образом:FILL TR = TMGR,где FILL TR - отфильтрованный крутящий момент стока насоса;GR - передаточное число коробки передач. Крутящий момент штока насоса определяют путем умножения крутящего момента электродвигателя на передаточное число коробки передач.FLUID TP = (FILT TR - PT - PC)DP - значение крутящего момента в таблице,где FLUID TP = крутящий момент насоса для перекачивания текучей среды;PT - давление в трубе; РС - давление внутри обсадной колонны;Dp представляет собой высоту напора насоса - основной поток насоса /основная скорость насоса. Табличное значение крутящего момента = табличное значение крутящего момента для текущей скорости Количество (Давление труб - Давление внутри обсадной колонны)Величину высоты нагнетания насоса вычитают из крутящего момента штока, и значение крутящего момента в таблице поиска скважины ID (соответствует настоящей скорости) вычитают из этого значения.FLUID PDIFF = FLUID TP/DP,где FLUID PDIFF - дифференциальное значение насоса для текучей среды;FLUID TP - крутящий момент насоса для текучей среды;Dp - высота нагнетания насоса = Основной поток насоса/Основная скорость насоса. Крутящий момент насоса делят на величину высоты нагнетания насоса для определения дифференциального давления насоса для текучей среды. Следует отметить, что дифференциальное давление насоса для текучей среды отделяют от давления на трение и давления в трубах/внутри обсадной колонны, и оно представляет давление, получаемое исключительно по нагрузке текучей среды.FLUID PPIP = (ХРT) - PDIFF текучей среды,где FLUID PPIP - давление всасывания насоса для текучей среды; ХР - глубина насоса;pT - плотность текучей среды в трубах. Дифференциальное давление текучей среды вычитают из давления нагрузки на столб текучей среды в трубах (Глубины насосаПлотность текучей среды в трубах), для получения давления на входе насоса для текучей среды.PIP = РС + FLUID PIP,где PIP - входное давление насоса; РС - давление внутри обсадной колонны;FLUID PIP - входное давление насоса для текучей среды. Давление внутри обсадной колонны добавляют к дифференциальному давлению текучей среды,получая давление всасывания насоса:FOP = PIP/c,где FOP = уровень текучей среды в обсадной колонне над насосом;PIP= давление всасывания насоса; С = плотность текучей среды в обсадной колонне. Давление на входе насоса для текучей среды делят на плотность текучей среды в обсадной колонне,получая в результате уровень текучей среды в обсадной колонне над насосом. Уровень текучей среды = ХР - FOP, где ХР = глубина насоса; FOP = уровень текучей среды в обсадной колонне над насосом. Уровень текучей среды в обсадной колонне над насосом вычитают из глубины насоса, получая, в результате, уровень текучей среды от поверхности. На фиг. 7A-7C показаны графические иллюстрации взаимосвязи оценочного уровня текучей среды с фактическим уровнем текучей среды только в первом режиме работы, в котором не идентифицировано трение насоса. Как показано на фиг. 7A, форма колебаний оценочного уровня 610 текучей среды показана приблизительно на 80 футов ниже формы колебаний фактического уровня 612 текучей среды непосредственно после WELLID. Поэтому калибровка уровня требуется для получения более точной оценки уровня текучей среды. На фиг. 7B показана форма колебаний оценочного уровня 610 текучей среды относительно формы колебаний фактического уровня 612 текучей среды после первого режима работы и после выполнения калибровки уровня. Как показано, форма колебаний оценочного уровня 610 текучей среды является такой же или приблизительно такой же, как и форма колебаний фактического уровня 612 текучей среды. На фиг. 7C представлены результаты операции калибровки по фиг. 7B через период времени, в который скорость 404 электродвигателя повышали и понижали. С другой стороны, на фиг. 8A и 8B показаны графики, иллюстрирующие формы колебаний, которые представляют взаимосвязь оценочного уровня текучей среды с фактическим уровнем текучей среды во время и после первого режима работы, при котором также идентифицировали трение насоса На фиг. 8A показана форма колебаний оценочного уровня 650 текучей среды относительно фактического уровня 652 текучей среды после работы в первом режиме с обратным вращением насоса для идентификации трения. На фиг. 8B показаны результаты работы на фиг. 8A в течение периода времени, в который ско-9 024649 рость 404 электродвигателя повышали и понижали. В результате работы насоса 102 в первом режиме работы, при котором определяли значение трения, калибровка уровня не потребовалась для получения точной оценки уровня текучей среды. Все ссылки, включая в себя публикации, патентные заявки и патенты, цитируемые здесь, представлены здесь по ссылке в той же степени, как если бы каждый документ ссылки, индивидуально и конкретно был обозначен для его представления по ссылке и был бы описан здесь полностью. С целью данного раскрытия термин "соединенный", означает соединение двух компонентов (электрических или механических) прямо или опосредованно друг с другом. Такое соединение может быть стационарным по своей природе или подвижным по своей природе. Такое соединение может быть достигнуто с двумя компонентами (электрическими или механическими) и любыми дополнительными промежуточными элементами, которые сформированы интегрально, как одна единая деталь друг с другом или с двумя компонентами и любым дополнительным элементом, скрепленными друг с другом. Такое соединение может быть постоянным по своей природе или в качестве альтернативы может быть съемным или разъемным по своей природе. Используемые в подробных ссылках в контексте описания насосной системы (в частности, в контексте следующей формулы изобретения) формы в единственном числе следует рассматривать как одновременно охватывающие единственное и множественное число, если только другое не будет здесь обозначено или ясно противопоставлено контекстом. Термины, "содержащий", "имеющий", "включающий в себя" и "вмещающий" следует рассматривать как не окончательные термины (т.е. означающие "включающие в себя, но не ограниченные этим"), если только не указано другое. Упоминание диапазонов значений здесь предназначено только для использования в качестве быстрого способа ссылки индивидуально на каждое отдельное значение, попадающее в пределы диапазона, если только другое не обозначено здесь, и каждое отдельное значение включено в спецификацию, как если бы оно было индивидуально упомянуто здесь. Все способы, описанные здесь, могут быть выполнены в любом соответствующем порядке, если только другое не обозначено здесь, или по-другому явно не противопоставлено контекстом. Использование любого и всех примеров или формулировок примера (например, "такой как"), представленных здесь, предназначено просто для лучшего освещения свойств раскрытия и не накладывает ограничение на объем раскрытия, если только не заявлено другое. Ни одну из формулировок в описании не следует рассматривать, как обозначение любого не заявленного элемента, существенного для выполнения на практике раскрытой насосной системы. Предпочтительные варианты воплощения данного раскрытия описаны здесь, включающие в себя лучший режим, известный авторам изобретения, для выполнения этого изобретения. Вариации этих предпочтительных вариантов воплощения могут стать понятными для специалистов в данной области после чтения предыдущего описания. Авторы изобретения ожидают, что специалисты в данной области техники будут использовать такие варианты соответствующим образом, и авторы изобретения предполагают, что изобретение может быть выполнено на практике по-другому, чем как, в частности, описано здесь. В соответствии с этим данное раскрытие включает в себя все модификации и эквиваленты предмета изобретения, упомянутого в приложенной здесь формуле изобретения, в соответствии с применимым законодательством. Кроме того, любая комбинация описанных выше элементов во всех возможных их вариантах охватывается раскрытием, если только другое не указано здесь или другое не будет ясно противопоставлено контекстом. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения оценочного уровня текучей среды в скважине без установки датчика внутри скважины с использованием насосной системы, которая содержит погружной винтовой насос, установленный в скважине, электродвигатель для привода насоса, контроллер, соединенный с электродвигателем, характеризующийся тем, что определяют рабочий параметр электродвигателя; определяют рабочие параметры насоса, включающие вращающий момент и скорость; записывают в таблицу соответствия, ассоциированную с контроллером, по меньшей мере одно значение вращающего момента насоса при определенной скорости насоса; поддерживают работу насоса с выбранной скоростью с помощью контроллера и определяют с помощью контроллера оценочный уровень текучей среды в скважине, используя рабочий параметр электродвигателя, рабочий параметр насоса и значения таблицы соответствия. 2. Способ определения оценочного уровня текучей среды по п.1, в котором дополнительно используют указанный оценочный уровень текучей среды для управления фактическим уровнем текучей среды в скважине посредством управления скоростью насоса. 3. Способ определения оценочного уровня текучей среды по п.1, в котором этап записи в таблицу соответствия включает в себя изменение скорости насоса в одном направлении от максимальной скорости до минимальной скорости и определение крутящего момента насоса для каждой конкретной скорости. 4. Способ определения оценочного уровня текучей среды по п.3, который включает в себя изменение скорости насоса в другом направлении от максимальной скорости до минимальной скорости и определение крутящего момента насоса для каждой конкретной скорости. 5. Способ определения оценочного уровня текучей среды по п.1, в котором определение рабочего параметра электрического двигателя содержит определение крутящего момента электродвигателя или скорости электродвигателя. 6. Способ определения оценочного уровня текучей среды по п.1, в котором определение рабочего параметра насоса содержит определение крутящего момента насоса или скорости насоса. 7. Способ определения оценочного уровня текучей среды по п.1, в котором контроллер представляет собой электронный компьютер, включающий в себя, по меньшей мере, модуль обработки, модуль сохранения, устройство ввода и устройство вывода. 8. Насосная система, содержащая насос, выполненный с возможностью управления уровнем текучей среды в скважине; электродвигатель, функционально соединенный с насосом и выполненный с возможностью привода насоса; контроллер, функционально соединенный с электродвигателем и выполненный с возможностью управления работой насоса, при этом контроллер содержит модуль определения электродвигателя, выполненный с возможностью определения рабочих параметров электродвигателя, выполненного с возможностью управления насосом в скважине, причем упомянутые рабочие параметры электродвигателя содержат крутящий момент электродвигателя и скорость электродвигателя; модуль определения насоса, функционально соединенный с модулем определения электродвигателя и выполненный с возможностью определения рабочих параметров насоса на основе по меньшей мере одного рабочего параметра электродвигателя, причем упомянутые рабочие параметры насоса включают в себя крутящий момент насоса и скорость насоса; модуль определения уровня текучей среды, функционально соединенный с модулем определения насоса и выполненный с возможностью определения оценочного уровня текучей среды в скважине,при этом упомянутый модуль определения текучей среды содержит модуль первого режима, выполненный с возможностью генерирования выходных данных первого режима на основе работы насоса в первом режиме, включающих в себя значение скорости насоса и крутящего момента насоса, связанных с конкретными значениями уровня текучей среды над насосом, и сохранения таких данных в базе данных отображения; упомянутый модуль определения текучей среды дополнительно содержит модуль второго режима, функционально соединенный с модулем первого режима, при этом модуль второго режима выполнен с возможностью управления насосом во втором режиме для определения оценочного уровня текучей среды, при этом текущие значения скорости и крутящего момента насоса сравниваются со значениями скорости и крутящего момента насоса в базе данных отображения; и модуль регулирования, функционально соединенный с модулем определения уровня текучей среды,причем модуль регулирования выполнен с возможностью регулирования скорости насоса для поддержания указанного оценочного уровня текучей среды при заданном значении точки установки. 9. Насосная система по п.8, в которой рабочий параметр электродвигателя характеризует крутящий момент электродвигателя или скорость электродвигателя. 10. Насосная система по п.8, в которой рабочий параметр насоса характеризует скорость насоса или крутящий момент насоса. 11. Насосная система по п.8, в которой модуль определения уровня текучей среды выполнен с возможностью изменения скорости электродвигателя до заданной скорости для определения оценочного уровня текучей среды в скважине. 12. Насосная система по п.8, в которой модуль первого режима выполнен с возможностью управления насосом на основе пропорционально-интегрально-дифференциальной (PID) функции или пропорционально-интегральной (PI) функции. 13. Насосная система по п.8, в которой модуль второго режима выполнен с возможностью управления насосом в режиме работы и получения значения скорости и крутящего момента насоса. 14. Насосная система по п.8, в которой указанный насос содержит насос, приводимый во вращательное движение. 15. Насосная система по п.8, в которой модуль первого режима и модуль второго режима выполнены с возможностью управления скоростью насоса или направления вращения насоса. 16. Насосная система по п.8, в которой насос представляет собой винтовой погружной насос. 17. Контроллер насоса, содержащий модуль определения электродвигателя, выполненный с возможностью определения рабочих параметров электродвигателя, выполненного с возможностью управления насосом в скважине, упомянутые рабочие параметры электродвигателя содержат крутящий момент электродвигателя и скорость электродвигателя; модуль определения насоса, функционально соединенный с модулем определения электродвигателя и выполненный с возможностью определения рабочих параметров насоса на основе по меньшей мере одного рабочего параметра электродвигателя, причем упомянутые рабочие параметры насоса содержат крутящий момент насоса и скорость насоса; модуль определения уровня текучей среды, функционально соединенный с модулем определения насоса и выполненный с возможностью определения оценочного уровня текучей среды в скважине,при этом упомянутый модуль определения текучей среды содержит модуль первого режима, выполненный с возможностью генерирования выходных данных первого режима на основе работы насоса в первом режиме, включающих в себя значения скорости и крутящего момента насоса, связанные с конкретными значениями уровня текучей среды над насосом, и сохранения таких данных в базе данных отображения; упомянутый модуль определения текучей среды дополнительно содержит модуль второго режима, функционально соединенный с модулем первого режима, причем модуль второго режима выполнен с возможностью управления насосом во втором режиме для определения оценочного уровня текучей среды при сравнении текущих значений скорости и крутящего момента насоса со значениями скорости и крутящего момента насоса в базе данных отображения; и модуль регулирования, функционально соединенный с модулем определения уровня текучей среды,причем модуль регулирования выполнен с возможностью регулирования скорости насоса для поддержания указанного оценочного уровня текучей среды при заданном значении точки установки. 18. Контроллер насоса по п.17, выполненный с возможностью задания оператором значения требуемого уровня текучей среды. 19. Контроллер насоса по п.17, в котором рабочий параметр электродвигателя содержит крутящий момент электродвигателя или скорость электродвигателя. 20. Контроллер насоса по п.17, в котором рабочий параметр насоса характеризует скорость насоса или крутящий момент насоса. 21. Контроллер насоса по п.17, в котором модуль определения уровня текучей среды выполнен с возможностью линейного изменения скорости электродвигателя до заданной скорости для определения указанного оценочного уровня текучей среды в скважине. 22. Контроллер насоса по п.17, в котором модуль определения уровня текучей среды выполнен с возможностью определения оценочного уровня текучей среды по значению на поверхности и по оценочному уровню текучей среды над насосом. 23. Контроллер насоса по п.17, в котором модуль первого режима выполнен с возможностью управления насосом на основе пропорционально-интегрально-дифференциальной (PID) функции или пропорционально-интегральной (PI) функции. 24. Контроллер насоса по п.17, в котором модуль второго режима выполнен с возможностью управления насосом для его работы и получения значения скорости и крутящего момента насоса. 25. Контроллер насоса по п.17, который предназначен для насоса, приводимого во вращательное движение. 26. Контроллер насоса по п.25, который предназначен для винтового погружного насоса. 27. Контроллер насоса по п.17, в котором модуль первого режима и модуль второго режима выполнены с возможностью управления скоростью насоса или направления вращения насоса.
МПК / Метки
МПК: G01F 23/00, E21B 47/047, E21B 43/20
Метки: уровней, текучей, погружного, насоса, среды, системе, винтового, оценка
Код ссылки
<a href="https://eas.patents.su/18-24649-ocenka-urovnejj-tekuchejj-sredy-v-sisteme-pogruzhnogo-vintovogo-nasosa.html" rel="bookmark" title="База патентов Евразийского Союза">Оценка уровней текучей среды в системе погружного винтового насоса</a>
Роторно- лопастное устройство с лопастями в виде роликов , насос для нагнетания текучей среды, содержащий это устройство, и комбинация двигателя и насоса, содержащих указанное устройство
Номер патента: 1966
Опубликовано: 22.10.2001
Автор: Группинг Арнолд Виллем Йозефус
МПК: E21B 4/02, F04C 11/00
Метки: виде, среды, двигателя, указанное, лопастное, содержащих, нагнетания, устройство, роторно, лопастями, текучей, насоса, это, насос, комбинация, содержащий, роликов
Формула / Реферат:
1. Роторно-лопастное устройство с лопастями в виде роликов, приводимое в действие текучей средой, содержащее корпус с осевыми концами, расположенными с противоположных сторон, и воображаемой основной осью между ними, и ротор, вращающийся вокруг этой основной оси в роторном пространстве внутри корпуса, с кольцевым пространством между ротором и внутренней стенкой корпуса, при этом корпус оснащен выступающими внутрь кулачками отклонения роликов,...
Способ удаления и отверждения диоксида углерода из потока текучей среды и устройство разделения текучей среды
Номер патента: 18055
Опубликовано: 30.05.2013
Авторы: Праст Барт, Лангерак Якоб Арие Корнелис, Беттинг Марко, Тьенк Виллинк Корнелис Антони
МПК: B01D 53/24, B01D 53/00, B01D 47/10...
Метки: текучей, устройство, диоксида, удаления, среды, отверждения, разделения, потока, способ, углерода
Формула / Реферат:
1. Устройство разделения текучей среды для удаления диоксида углерода из потока текучей среды, содержащее циклонный сепаратор текучей среды, имеющий суженную часть, расположенную между сходящейся входной секцией для текучей среды и расходящейся выходной секцией для текучей среды; и расположенное во входной секции для текучей среды и создающее завихрение средство для создания турбулентного движения текучей среды, содержащей диоксид углерода, при...
Способ удаления диоксида углерода из потока текучей среды и устройство для разделения текучей среды
Номер патента: 20177
Опубликовано: 30.09.2014
Авторы: Тьенк Виллинк Корнелис Антони, Лангерак Якоб Арие Корнелис, Беттинг Марко, Праст Барт
МПК: B01D 53/24, B01D 45/16, B01D 53/00...
Метки: потока, удаления, устройство, среды, текучей, углерода, разделения, способ, диоксида
Формула / Реферат:
1. Способ удаления диоксида углерода из потока текучей среды посредством устройства для разделения текучей среды, включающего в себяциклонный сепаратор (1) текучей среды, содержащий горловую часть, расположенную между сужающейся секцией для приема текучей среды и расширяющейся секцией для выпуска текучей среды, и узел для создания завихрений, выполненный с возможностью создания вихревого движения текучей среды, содержащей диоксид углерода,...
Ступень погружного многоступенчатого насоса
Номер патента: 1523
Опубликовано: 23.04.2001
Авторы: Мельников Денис Юрьевич, Гусин Николай Васильевич, Дорогупец Геннадий Леонидович, Выдрина Ирина Васильевна, Трясцын Игорь Павлович, Иванов Олег Евгеньевич, Трегубов Григорий Самарьевич, Куприн Павел Борисович, Мельников Михаил Юрьевич, Перельман Олег Михайлович, Штенникова Галина Александровна, Агеев Шарифжан Рахимович, Семенов Юрий Львович, Рабинович Александр Исаакович
МПК: F04D 13/10
Метки: погружного, насоса, ступень, многоступенчатого
Формула / Реферат:
1. Ступень погружного многоступенчатого насоса, имеющая рабочее колесо, содержащее ведущий и ведомый диски с размещенными между ними лопатками, и направляющий аппарат с лопатками, входные кромки которых выступают за внешний диаметр наружной крышки аппарата, отличающаяся тем, что на периферии ведущего диска рабочего колеса на его боковой поверхности установлены трехсторонние ячейки, открытые с внешней стороны диска, а на сопряженной колесу...
Уплотнительная секция для скважинного погружного насоса
Номер патента: 12953
Опубликовано: 26.02.2010
Авторы: Пармитер Ларри Дж., Лими Бретт Д., Холл Кларенс Ф.
МПК: F04D 13/10, H02K 5/132
Метки: скважинного, уплотнительная, погружного, секция, насоса
Формула / Реферат:
1. Уплотнительная секция для погружного скважинного насосного агрегата, предназначенная для установки между насосом и двигателем насосного агрегата, содержащаявал, проходящий через корпус секции с возможностью вращения и передачи вращательного движения от двигателя к насосу;центральную радиальную опору, предназначенную для крепления вала с возможностью его вращения и формирующую в корпусе верхнюю и нижнюю камеры;канал для пропускания скважинного...
Предыдущий патент: Производные пиразола
Следующий патент: Способ получения кристаллической формы i агомелатина
Случайный патент: Производные малонамида, блокирующие активность γ- секретазы