Мониторинг и управление устройством ларингеальная маска для дыхательных путей
Номер патента: 1833
Опубликовано: 27.08.2001
Авторы: Брэйн Арчибальд И.Дж., Зокка Марио, Моццо Паоло
Формула / Реферат
1. Устройство (10) для автоматического мониторинга уровня бессознательности у пациента (13) в ходе хирургической процедуры, в котором введенное пациенту накачиваемое устройство (19) имеет контакт через стенку, по меньшей мере, с частью гортани пациента и в котором накачиваемое устройство содержит гибкую трубчатую линию (11) для заполнения воздухом, доступ к которой возможен вне пределов организма пациента, причем устройство содержит
(а) средство восприятия, включающее преобразователь давления (P1, Р2), разъемно присоединяемый к линии для заполнения воздухом для получения выходного электрического сигнала, соответствующего непрерывно воспринимаемому давлению заполнения в функции времени в течение хирургической процедуры;
(б) средство, включающее шприц, имеющий цилиндр (26) с передней частью, предназначенной для разъемного соединения (11') с линией заполнения воздухом, и поршень (27) в цилиндре для задания, по существу, постоянного объема воздуха заполнения внутри накачиваемого устройства, его линии для заполнения и передней части цилиндра, причем поршень установлен с возможностью перемещения относительно цилиндра для изменения пропорции объемов воздуха между накачиваемым устройством и передней частью цилиндра;
(в) средство сравнения воспринимаемого давления с опорным значением для определения отклонения от опорного значения; и
(г) средство регулирования, содержащее реверсивно работающее средство привода (33) для перемещения поршня в цилиндре для возврата давления на опорную величину.
2. Устройство по п.1, в котором введенное устройство является ЛМ-устройством (12), содержащим трубку (14) воздуховода с маской (16) и надувной манжетой (19) на дистальном конце для образования плотного прилегания вокруг входа гортани (21) пациента, причем связь с легкими пациента осуществляется через трубку воздуховода и маску, а с надувной манжетой связана гибкая линия для заполнения воздухом.
3. Устройство по п.2, включающее средство (60) микропроцессора, запрограммированное для определения отдельно верхнего и нижнего допустимых пределов воспринимаемого давления воздуха и выработки выходного сообщения об обнаружении ситуации, когда давление выходит за один из этих пределов.
4. Устройство по любому из пп.1-3, дополнительно содержащее средство отображения, оперативно присоединенное к средству восприятия для получения отображения воспринимаемого давления заполнения в зависимости от времени.
5. Устройство по п.4, в котором средство отображения содержит визуальный выход, отображающий для заданного интервала времени амплитуду давления в виде переменной ординаты, непрерывно проходящей от одного предела заданного интервала времени до другого, причем текущее и последнее наблюдаемое давление отображены у одного предела, а заданные верхний и нижний допустимые пределы отображены в виде отдельных горизонтальных линий над и под отображением воспринимаемого давления заполнения воздухом.
6. Устройство по любому из пп.1-5, в котором реверсивно работающее средство привода содержит двигатель (33), присоединенный для реверсивного привода к ходовому винту (34) и средству гайки (34'), имеющему резьбовое соединение с ходовым винтом, причем средство гайки направлено продольно и закреплено от вращения, а также соединено для непосредственного продольного перемещения поршня в цилиндре.
7. Устройство по любому из пп.1-5, в котором реверсивно работающее средство привода содержит шаговый двигатель (33) с цифровым управлением и в котором выход воспринимаемого давления представлен в форме первого цифрового сигнала, опорное значение представлено в форме второго цифрового сигнала, а средство сравнения содержит микропроцессор, запрограммированный для подачи цифровых сигналов для работы двигателя.
8. Устройство по любому из пп.1-7, в котором передняя часть цилиндра выполнена с возможностью разъемного соединения с линией заполнения воздухом через средство клапана (V1), работающего между открытым состоянием для допуска соединения между накачиваемым устройством и передней частью цилиндра и закрытым состоянием.
9. Устройство по п.8, которое также содержит второе средство клапана (V2), присоединенное к передней части цилиндра и работающее между открытым состоянием для допуска соединения с атмосферой и закрытым состоянием.
10. Устройство по п.9, в котором каждый клапан является нормально закрытым соленоидным клапаном, причем первый клапан электрически присоединен к средству управления с возможностью регулирования давления в накачиваемом устройстве, а второй клапан электрически присоединен к средству управления с возможностью автоматического выпуска или впуска воздуха при поддержании, по существу, постоянного распределенного коллективно объема воздуха внутри накачиваемого устройства и передней части цилиндра.
11. Устройство по п.10, включающее средство добавления воздуха для допуска заданного количества атмосферного воздуха в цилиндр, причем средство добавления воздуха содержит
средство конечного выключателя (LS2), вырабатывающее электрический сигнал при восприятии условий, указывающих на перемещение поршня на заданную глубину в переднюю часть цилиндра, и в соответствии с пределом допустимого хода поршня в передней части; и
средство, содержащее микропроцессор, реагирующий на сигнал восприятия глубины поршня, причем микропроцессор запрограммирован таким образом, чтобы
(I) возвратить первый соленоидный клапан (V1) в нормально закрытое состояние;
(II) включить второй соленоидный клапан (V2) в открытое состояние и затем работать со средством привода для осуществления заданного обратного перемещения, впуская тем самым свежий воздух из атмосферы в цилиндр; и
(III) выключить второй соленоидный клапан и включить средство сравнения для восстановления заданного значения давления внутри цилиндра перед повторным включением первого соленоидного клапана и возврата средства сравнения в режим регулирования давления заполнения воздухом на уровне заданного значения.
12. Устройство по п.10 или 11, включающее средство выпуска воздуха для выпуска заданного количества воздуха из цилиндра, причем средство выпуска воздуха содержит
средство конечного выключателя (LS1), вырабатывающее электрический сигнал при восприятии условия, указывающего на перемещение поршня на заданную глубину в фланцевую часть цилиндра в соответствии с пределом допустимого хода поршня; и средство, включающее микропроцессор, реагирующий на сигнал восприятия глубины поршня, причем микропроцессор запрограммирован так, чтобы
(I) возвратить первый соленоидный клапан (V1) в нормально закрытое состояние;
(II) включить второй соленоидный клапан (V2) в открытое состояние и затем работать средством привода для осуществления прямого перемещения на заданное расстояние, выпуская тем самым заданное количество воздуха из цилиндра, и
(III) выключить второй соленоидный клапан и включить средство сравнения для восстановления заданного значения давления внутри цилиндра перед повторным включением первого соленоидного клапана и возврата средства сравнения в режим регулирования давления заполнения воздухом на уровне заданного значения.
13. Устройство по любому из пп.1-12, в котором волюметрическая емкость перемещения цилиндра составляет порядка 20 см3.
14. Способ мониторинга уровня бессознательности пациента в ходе хирургической процедуры у пациента, при котором пациенту вводят накачиваемое устройство (19), имеющее контакт через стенку, по меньшей мере, с частью гортани пациента, и используют устройство в соответствии с любым из пп.1-13.

Текст
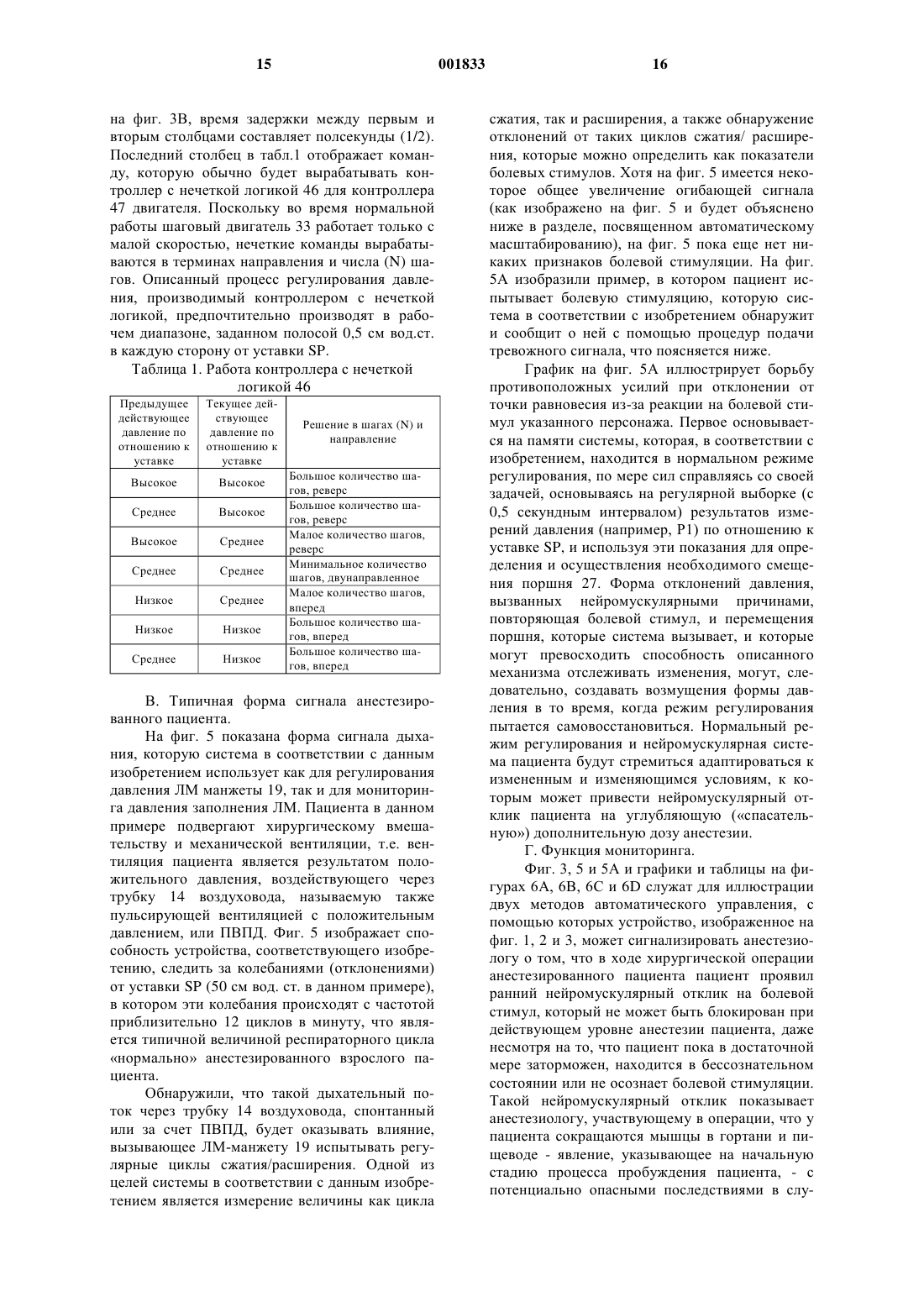
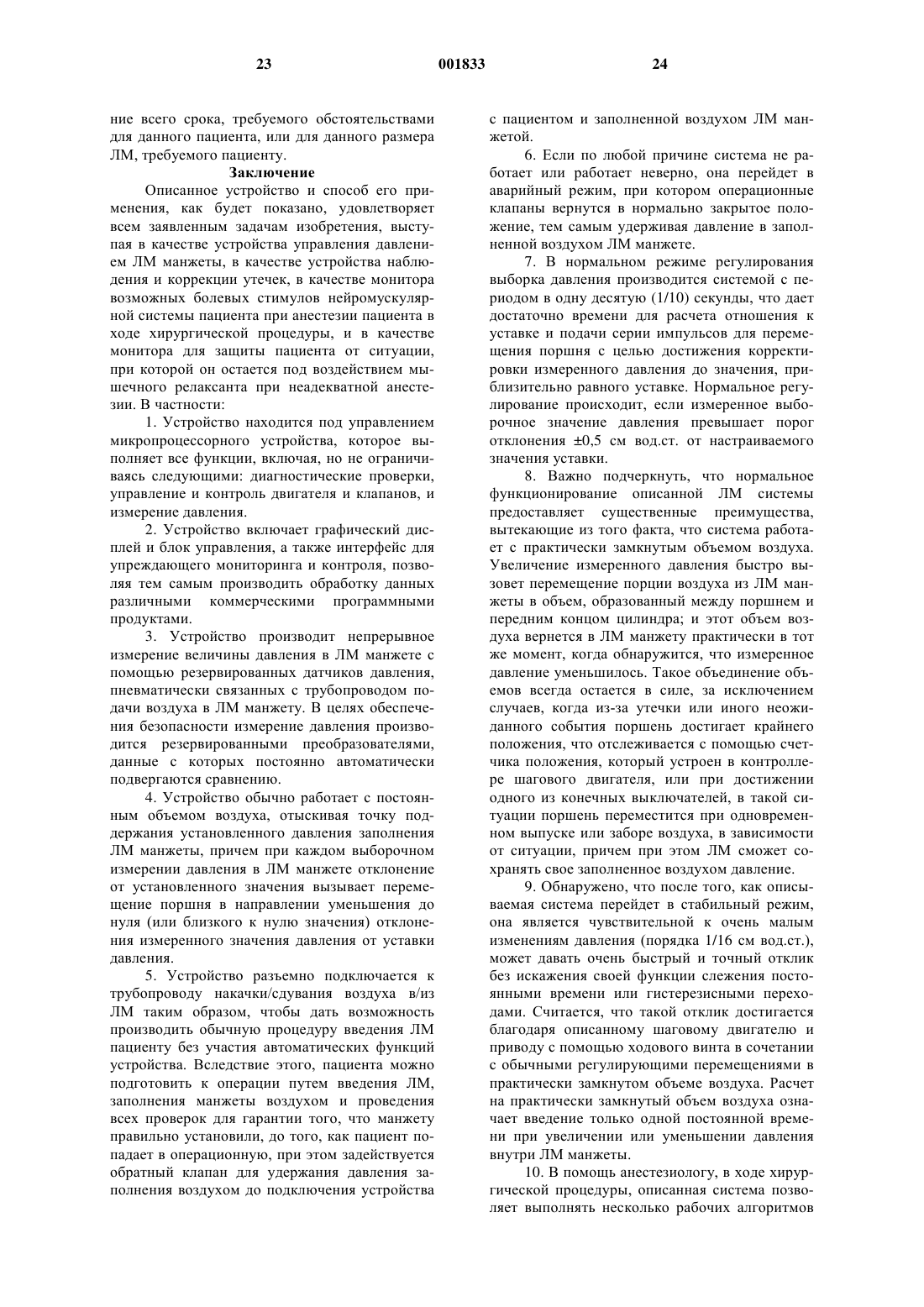
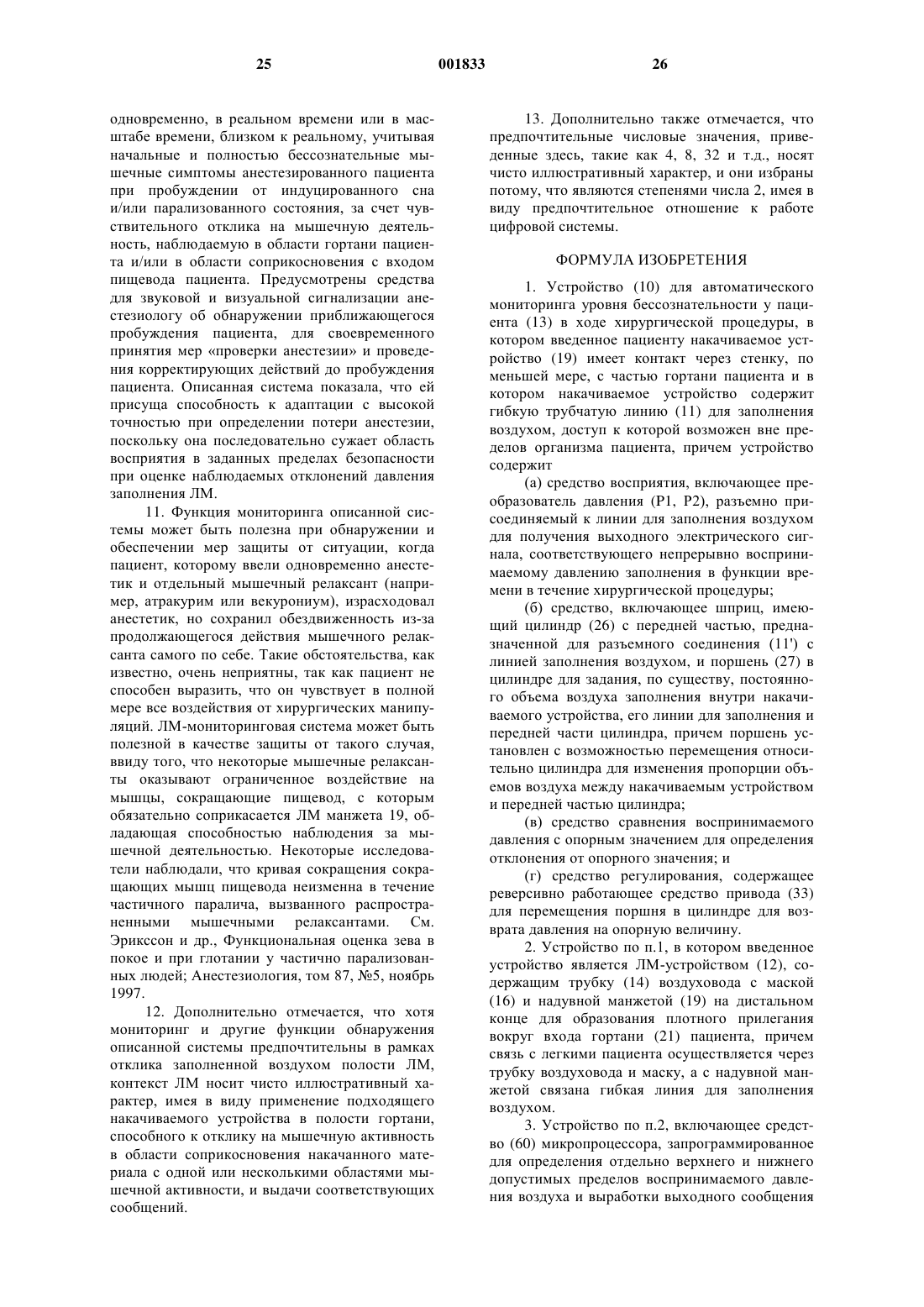
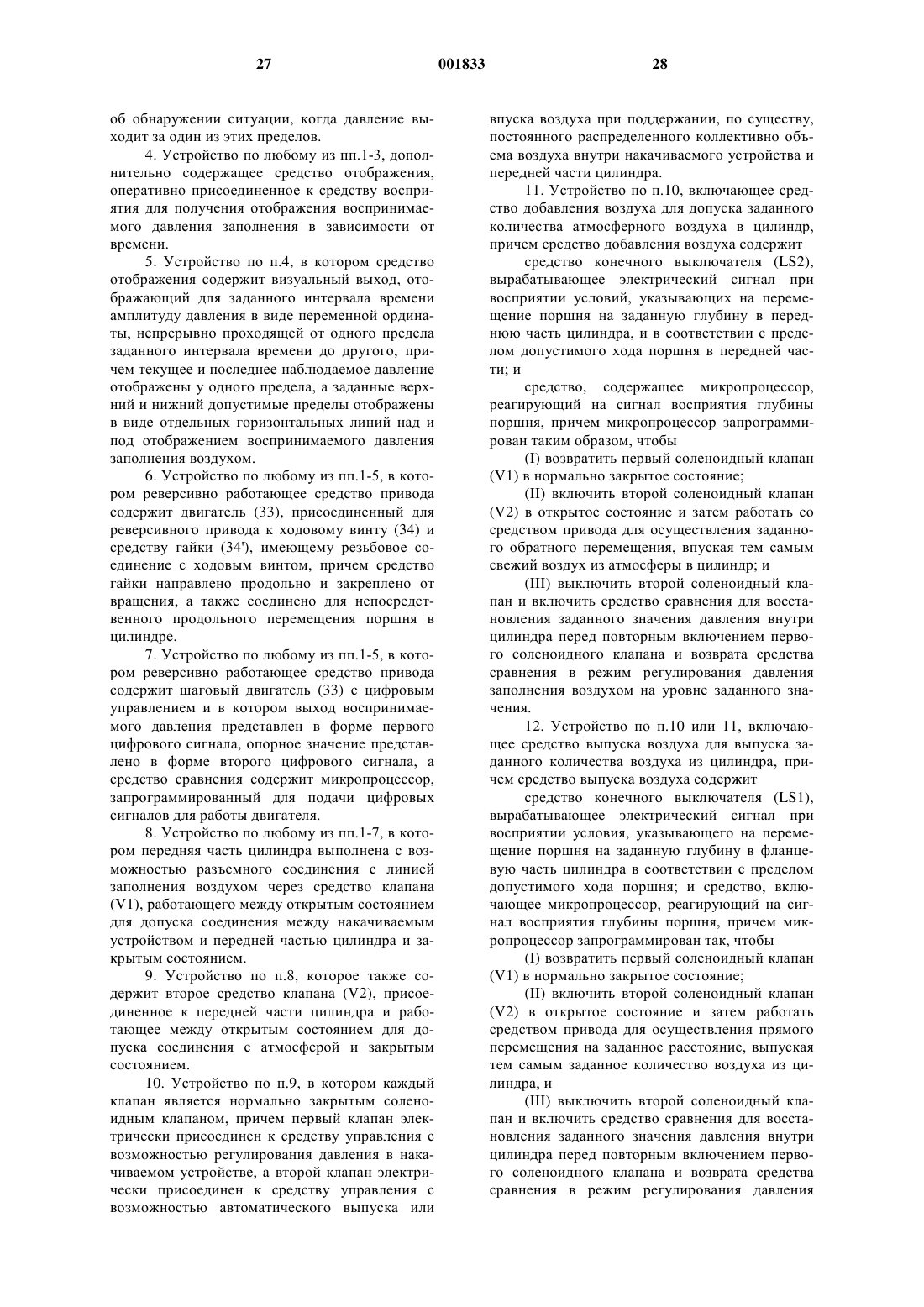
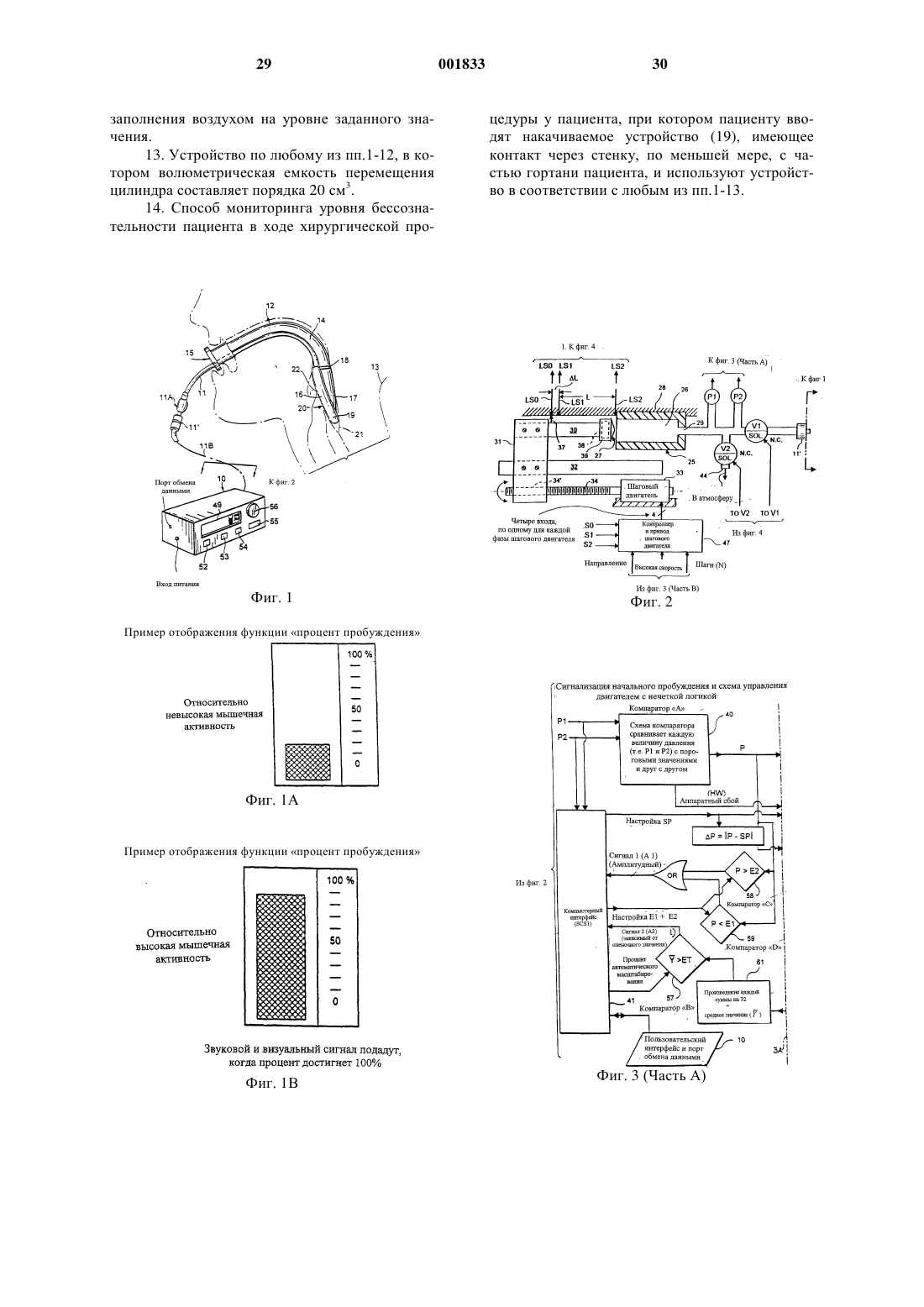
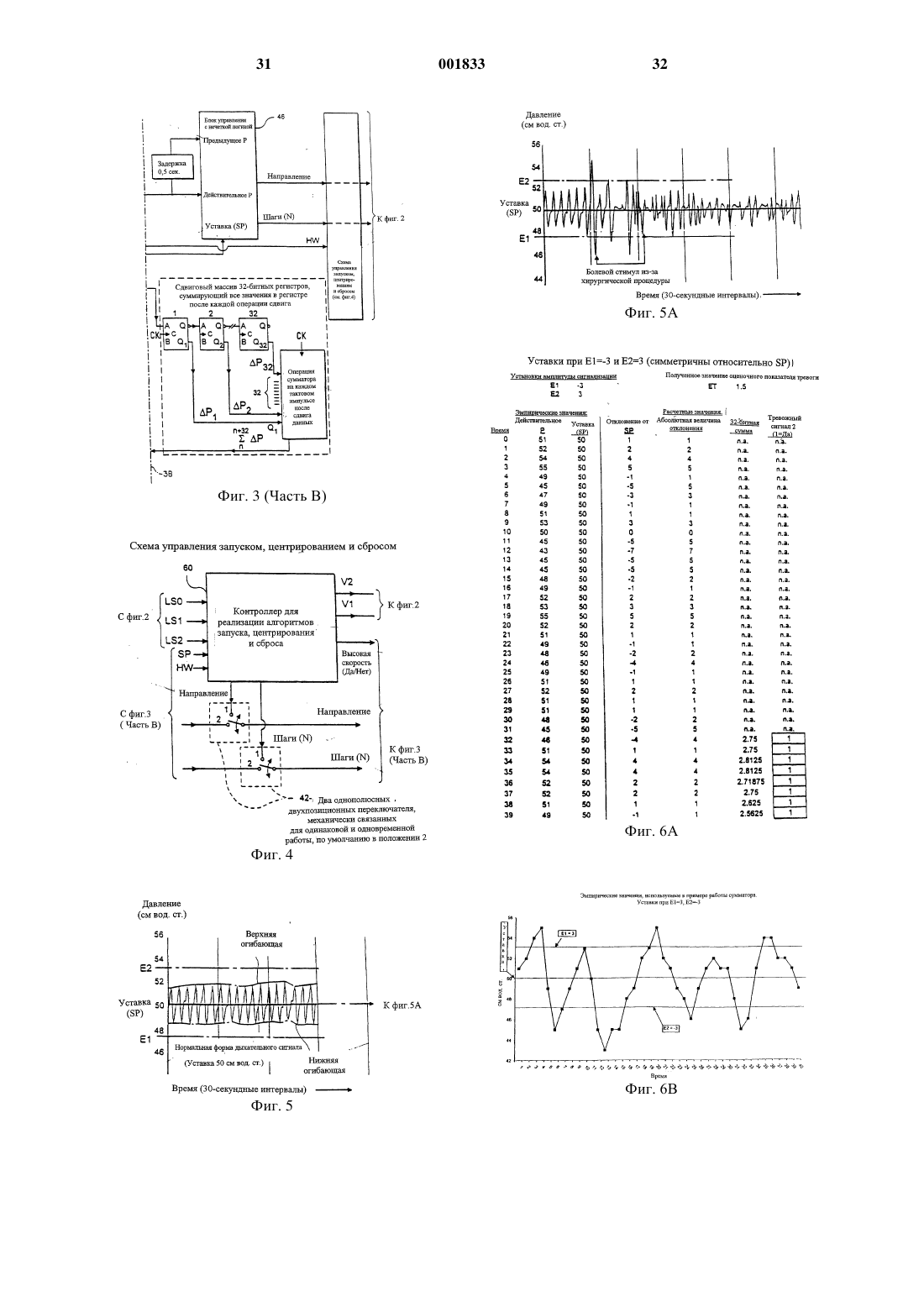
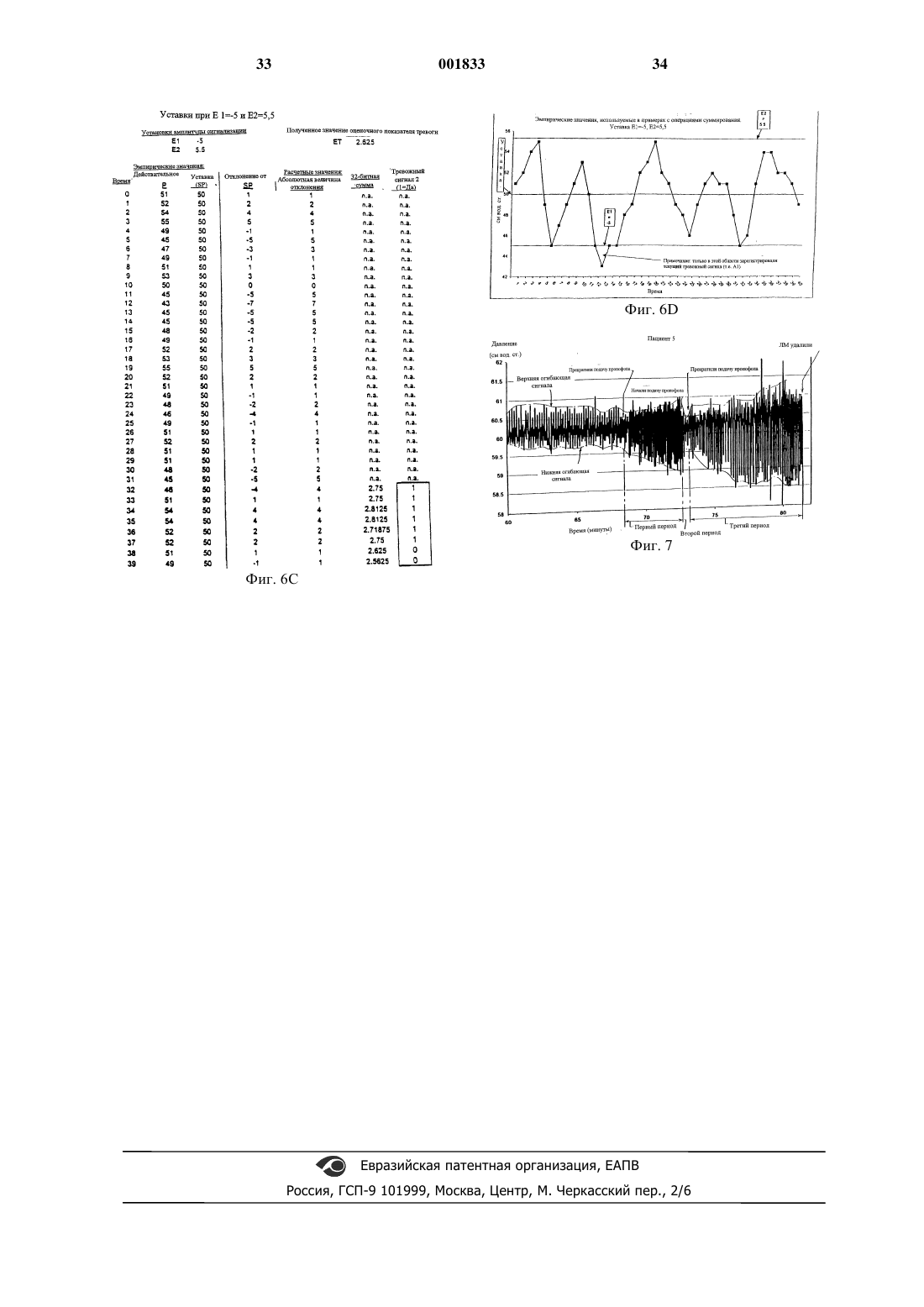
1 Область изобретения Данное изобретение относится к устройству, применяемому для управления и/или мониторинга давления заполнения воздухом внутри устройства ларингеальная маска (ЛМ) для дыхательных путей, и к способу и средствам для мониторинга самочувствия пациента посредством изменения этого давления заполнения воздухом. ЛМ-устройства хорошо известны в настоящее время и широко распространены при лечении пациентов, как во время, так и после хирургического вмешательства, а так же во время процедур, при которых поддерживают открытыми дыхательные пути. Такие устройства и их конструкция и применение описаны в разнообразных публикациях патентов, например, в патенте Великобритании 2,205,499 и патентах США 4,509,514, 5,303,697, 5,241,956 и 5,282,464. То, что ЛМ-устройства являются общепринятыми инструментами для лечения пациентов, следует из простой статистики. Например,было оценено, что такие устройства используют приблизительно в 50% всех оперативных процедур с применением общей анестезии в Великобритании, и их применение все шире по всей Европе и США. В принципе, ЛМ-устройство включает трубку воздуховода, размеры и изгиб которой в целом соответствуют дыхательным путям пациента; трубка воздуховода простирается от проксимального конца, который расположен вне пределов организма пациента, до дистального конца, на котором закрепляют устройство в виде маски, имеющее форму чаши или поддона,которое располагают напротив ларингеального входа пациента, закрывая его, причем по всему его периметру проходит эластичное кольцо или манжета, которые избирательно могут надувать с целью придания точного соответствия форме участка тела пациента вокруг ларингеального входа для герметичного уплотнения. При применении ЛМ сперва полностью сдувают, чтобы упростить ее введение, и затем вводят через рот и горло пациента, устанавливая в необходимое положение, при котором маска расположена над ларингеальным отверстием. Надувную манжету,окружающую маску, затем надувают для создания уплотнения между маской и отверстием гортани. Давление воздуха, которым накачана манжета, прижимает тыльную сторону чаши маски к твердым тканям задней части горла для удержания устройства на месте и сохранения уплотнения. Таким образом, устройство образует открытый воздуховод, через который могут вентилироваться легкие пациента. Такие ЛМ-приборы доказали надежность своей конструкции и относительную простоту в применении, даже для парамедиков после должного обучения; однако, если маску неправильно ввели, надежный воздуховод не образу 001833 2 ется и, следовательно, вентиляция легких пациента нарушается. Кроме того, мягкий податливый силиконовый материал манжеты, как оказалось, абсорбирует окись азота из анестезирующей газовой смеси, тем самым давление внутри манжеты увеличивается, и сама манжета может случайно дать течь, что приведет к уменьшению внутреннего давления в манжете. Кроме того,обнаружили, что слишком высокое давление в манжете приводит к тому, что манжета ограничивает приток крови к слизистой оболочке, покрывающей мускулы вокруг гортани, поэтому продолжительное применение ЛМ-устройства в таких обстоятельствах может привести к некрозу тканей. Недавно предложили наблюдать за уровнем сознания пациента с помощью устройства,способного обнаруживать и анализировать церебральную активность, в качестве попытки предотвратить пробуждение во время хирургического вмешательства; однако, оборудование,необходимое для такого наблюдения, сложно в эксплуатации и дорого в производстве. Предложили также применить автоматическое оборудование для мониторинга внутриманжетного давления в объемной манжете низкого давления, связанной с эндотрахеальной трубкой(ЭДТ). Сообщили, что такие ЭДТ-устройства способны измерять и регулировать внутриманжетное давление с допустимой погрешностью 3 мм рт.ст. Авторы данного изобретения наблюдали,что напряженность мышц (тонус) в нижней части гортани (hypopharynx) порождает связь с явным откликом пациента на болезненные стимулы; таким образом, возможно получить информацию о глубине анестезии пациента путем мониторинга тонуса мышц в hypopharynx. Авторы также обнаружили, что очень малые изменения в этом тонусе мышц передаются через ЛМманжету, и далее передаются через объем воздуха, и что результаты измерения такой обратной связи по давлению можно использовать как для автоматического регулирования давления заполнения воздуха в ЛМ-манжете, а также для обнаружения изменений в мышечном тонусе вhypopharynx. Конечно, обнаружение таких изменений наиболее предпочтительно производить без причинения сдавливания пациента, и в этой связи наблюдали, что наиболее благотворно надувать манжету давлением, ненамного превышающим 60 см вод.ст., например, 50 см вод.ст., и, в общем, в диапазоне 25-100 см вод.ст. Наблюдали приемлемость использования давления выше 60 см вод. ст. на предмет возможности раздражения гортани пациента, особенно при длительных процедурах, при этом возможно повреждение этих тканей. Раскрытие изобретения Настоящее изобретение имеет основной задачей предложить устройство, способное (а) осуществлять мониторинг с высокой чувстви 3 тельностью, например, 0,0625 см вод.ст., давления внутри манжеты ЛМ-устройства, правильно установленного в дыхательных путях пациента; и (б) поддерживать заданное давление заполнения воздухом с малой допустимой погрешностью, например, 0,5 см вод.ст. Кроме того, задачей настоящего изобретения является предложить устройство, которое можно запрограммировать для распознавания различных форм изменения давления внутри манжеты ЛМ-устройства, если необходимо, для выработки требуемого набора различных предупреждений оператору при возникновении указанных форм изменения давления, а также для обнаружения аномальных условий работы,угрожающих целостности ЛМ-устройства. Особой задачей изобретения является предложить устройство для мониторинга с символьным отображением, в котором, в случае, когда пациента анестезировали для хирургического вмешательства, мониторинг давления заполнения воздухом ЛМ-устройства в ходе хирургического вмешательства, может включать такой автоматизированный анализ изменений давления заполнения воздухом ЛМ-устройства, чтобы сообщать оператору, что пациент проявил аномальную активность, свидетельствующую о начальной стадии пробуждения, тем самым давая сигнал анестезиологу, что пациенту требуется немедленная дополнительная анестезия. Еще одной задачей изобретения является предложить устройство для решения вышеназванных задач, которое было бы относительно недорогим в производстве, несложным в установке, надежным в работе и обслуживании. Еще одной задачей изобретения является достижение вышеупомянутого регулирования давления без необходимости применения иной формы системы, компоненты которой вводили бы дополнительные постоянные времени или эффекты гистерезиса в работу системы мониторинга давления; например, такие, как было бы вызвано системой аккумуляторного типа, использующей резервуар под повышенным давлением, накачанным насосом или другим способом, для восстановления рабочего давления устройства. Изобретение также предлагает способ поддержания заданного давления в ЛМ-устройстве и способ для мониторинга изменений давления внутри ЛМ-устройства для обнаружения изменений в состоянии пациента и для управления введением анестезии и/или мышечного релаксанта. Предпочтительный вариант реализации изобретения удовлетворяет вышеназванным задачам за счет использования оборудования для автоматического регулирования давления в ЛМ-устройстве, введенном пациенту, в котором ЛМ-устройство включает средство, надуваемое до заданного уровня давления, с целью достижения герметичной связи между внутренней 4 полостью устройства и входом гортани пациента, причем указанное устройство включает:(а) шприцевое средство, снабженное поршнем, перемещаемым в продолговатом цилиндре с выходным штуцером для подачи воздуха в надуваемое средство;(б) реверсивно функционирующее средство привода для реверсивного перемещения поршня относительно цилиндра, т.е. для селективного перемещения воздуха в- или из- надуваемом средстве;(в) средство управления, включающее (I) средство, чувствительное к давлению, присоединенное для восприятия текущего давления у выходного штуцера, (II) регулируемое средство для выбора значения уставки давления заполнения воздуха, (III) средство сравнения, присоединенное для реагирования на выбранное значение уставки, для выработки электрического выходного сигнала, отражающего разность между текущим давлением и выбранным значением уставки; и(г) средство, соединяющее электрический выходной сигнал для работы средства привода для перемещения поршня относительно цилиндра в направлении, соответствующем полярности, для снижения до нуля или около нуля электрического выходного сигнала, вырабатываемого средством сравнения. Предпочтительно,чтобы реверсивно функционирующее средство привода включало электрический двигатель, в целях обеспечения реверсивного привода соединенный со средством ходовой винт и гайка, навинченная на ходовой винт, причем средство гайки продольно направляют и предохраняют от проворачивания и прикрепляют с целью обеспечения прямого продольного перемещения поршня в цилиндре. Предпочтительным типом электрического двигателя является шаговый двигатель, приводимый в действие в режиме разомкнутого контура, который работает без проскальзываний или гистерезисных запаздываний/ошибок. Направление и скорость вращения двигателя зависят от последовательности и частоты фазы прикладываемого возбуждения. Точнее, реверсивно функционирующее средство привода включает такой шаговый двигатель, в котором средство чувствительное к давлению, производит первый цифровой выходной сигнал, в котором значение уставки представляют в форме второго цифрового выходного сигнала, и в котором средство сравнения включают микропроцессор, запрограммированный на подачу цифровых сигналов управления для работы двигателя. Предпочтительно, чтобы первый нормально закрытый соленоидный клапан подключался к выводному штуцеру шприцевого средства в промежуток между выводным штуцером и средствами, причем соленоид клапана электрически связан со средством управления, посред 5 ством которого включают клапан в открытое положение, по меньшей мере, на время действия электрического выходного сигнала, пока электрический выходной сигнал отличается от нуля. Второй нормально закрытый соленоидный клапан подключают к выводному штуцеру шприцевого средства; при включении в открытое положение этот второй клапан обеспечивает доступ окружающего воздуха в шприц, для добавления воздуха или выхода избыточного воздуха из системы при закрытом положении первого соленоидного клапана. Предпочтительно, чтобы цилиндр имел осевой торец с отверстием, закрытым в противном случае; и каждый из двух нормально закрытых соленоидных клапанов подключают для обслуживания торца цилиндра с отверстием. Первый нормально закрытый соленоидный клапан также подключают к надуваемому средству ЛМ и приводят в действие для обеспечения воздухообмена между надуваемым средством и цилиндром, в зависимости от направления перемещения поршня; а второй нормально закрытый соленоидный клапан выполнен с возможностью приведения в действие, как описано выше,для обеспечения доступа окружающего воздуха в цилиндр или для выпуска воздуха из цилиндра, в зависимости от направления перемещения поршня. Первое средство конечного выключателя вырабатывает электрический сигнал для воспринятого положения поршня в заранее заданной предельной точке вблизи от закрытого торца, а средство, включающее микропроцессор, чувствительно к сигналу воспринятой близости поршня, причем микропроцессор программируют таким образом, чтобы(I) прекращать работу средства привода и возвращать первый соленоидный клапан в свое нормально закрытое положение, затем(II) включать второй соленоидный клапан в открытое положение при работе средства привода на заданное перемещение в обратном направлении, тем самым вызывая пополнение свежим окружающим воздухом в цилиндре, зависящее от заданного перемещения в обратном направлении, и(III) выключать второй соленоидный клапан и дать возможность средству сравнения вновь установить заданное значение давления внутри цилиндра перед повторным включением первого соленоидного клапана и возобновить работу средства сравнения по регулированию давления заполнения воздухом ЛМ на уровне установленного значения. Еще одной функцией, управляемой микропроцессором, в рассматриваемом предпочтительном варианте реализации изобретения является постоянный мониторинг давления заполнения маски воздухом, когда пациента подвергли анестезии и проводят хирургическое вмешательство. Постоянно наблюдаемое давление заполнения маски воздухом проверяют на воз 001833 6 можность перехода за заданные верхний и/или нижний пороговые значения нормального регулирования; и при наблюдении перехода наблюдаемого давления за одно из этих пороговых значений, вырабатывают первый тревожный сигнал в форме звукового предупреждения,причем этот сигнал интерпретируют таким образом, что хотя пациент еще спит и находится в заторможенном состоянии, он невольно проявил признаки сокращения мышц hypopharynx/larynx,сопровождаемые кратковременным локальным сжатием заполненной воздухом ЛМ пациента. Одновременно производят автоматический мониторинг для определения факта возникновения некоторых условий, связанных с выходом номинального значения за пределы заданной величины вычисленного критерия. Такие явления,связанные с номинальным значением, подробнее описаны ниже, и их определяют после непрерывного анализа стробированной последовательности нескольких последовательных показаний, которые сохраняют в памяти системы; а результат такого анализа непрерывно отображают на мониторе системы. Этот связанный с номинальным значением анализ наблюдаемого давления заполнения воздухом обеспечивает дальнейшие указания на начинающийся у пациента процесс пробуждения и обеспечивает проверку первого тревожного сигнала, дополнительно сигнализируя анестезиологу зрительным предупреждением Проверить анестезию. Краткое описание чертежей Устройство и способы согласно данному изобретению описаны подробнее ниже на примерах с использованием приложенных чертежей, на которых: Фиг. 1 - изображение системы управления и мониторинга согласно изобретению, подключенной к ЛМ-устройству, введенному пациенту; фиг. 1 А - воспроизведение первого из двух типичных показаний признака процент пробуждения, которое может занимать часть экрана или весь экран монитора; фиг. 1 В - аналогичное воспроизведение второго и последующих показаний признака процент пробуждения; фиг. 2 - схема механических элементов системы фиг. 1 со схематическим указанием элементов управления двигателем; фиг. 3 включает в себя несколько отдельных листов, маркированных фиг. 3 (часть А) и фиг. 3 (часть В), и является более схематичным изображением средства управления, включая средство сравнения и схему управления двигателем системы, изображенной на фиг. 2, в которой измеренное давление оценивают относительно заданного значения SP для определения привода воздушного поршня, а также оценивают измеренное давление относительно пороговых значений для определения статуса тревожных сигналов, ответственных за болевые стимулы;(часть А) и штрихпунктирная линия 3 В на фиг. 3 (часть В) представляют собой линию совмещения частей 3 А и 3 В для получения полной фигуры 3; фиг. 4 - схема средств, благодаря которым система может переходить между состояниями запуска, центрирования и сброса; фиг. 5 - графическое отображение наблюдаемых системой вариаций давления в функции времени в уплотнительной манжете ЛМ, введенной пациенту, которого анестезировали и подвергают хирургическому вмешательству, но который пока не имеет болевых раздражений; фиг. 5 А - графическое отображение как на фиг. 5 непосредственно перед аномалией, отражающей болевое раздражение, и последующее отображение отклика системы; фиг. 6 А и фиг. 6 С - таблицы, раскрывающие типичные вычисления, проведенные над данными тестовой выборки, сравнение этих значений с заданным значениям и выполнение вычислений, связанных с тревожными сигналами, относящимися к номинальному значению,для каждой выборки; фиг. 6 В и фиг. 6D - графическое представление значений, заданных на фиг. 6 А и фиг. 6 С; и фиг. 7 - отображение наблюдаемых эмпирических данных, полученных во время процесса пробуждения пациента; эти данные представляют собой пример отклика на болевое раздражение, раскрытого путем анализа функций мониторинга системы. Подробное описание А. Механическая конструкция и порядок работы. На фиг. 1 система мониторинга или устройство, изображенное на фиг. 2, отмечено позицией 10, включая различные кнопки управления, среди которых кнопка 52 запуска/останова системы, кнопка 53 запуска/останова регулирования, кнопка 54 сброса тревожного сигнала,кнопка 55 Ввод, и вращаемый регулятор 56 для выбора уставки или порога в процессе работы. Система 10 мониторинга снабжена штуцерным соединением для гибкой воздуховодной линии 11 накачки/сдувания ЛМ-устройства 12,введенного пациенту 13. ЛМ-устройство 12 включает трубу 14 воздуховода, на проксимальном конце которой имеет средство 15 для наружного подключения источника вентиляции легких или анестезии через маску 16 с опорной пластиной 17, соединенной в точке 18 к дистальному концу трубки 14, причем опорная пластина окружена по периферии надуваемым/сдуваемым кольцом или манжетой 19 из мягкого эластичного материала; манжета 19 показана в надутом состоянии, уплотняя по периферии контакт с телом пациента в районе полости гортани 20 и дистальным концом распо 001833 8 ложенная во входе пищевода 21 (hypopharynx). Внутренняя структура включает в себя известные средства (не показаны) для предотвращения контакта надгортанника 22 пациента с потоком воздуха или анестезирующего газа через маску в любом направлении между трубкой 14 и входом гортани 20 пациента. Обычно с надуваемым/сдуваемым кольцом или манжетой 19 ЛМ-устройства работают вручную, ручным шприцем (не показан), разъемно подключенным к средству обратного клапана 11 А, образующему наружный с конец линии 11 ЛМ; при этом когда шприц отключают,средство обратного клапана 11 А включается в работу для того, чтобы сохранять заполненное или спущенное состояние ЛМ. Из опыта анестезиолог приблизительно представляет, до какого давления можно безопасно надувать манжету после правильного введения пациенту. Хотя для заполнения воздухом манжеты после введения ее пациенту можно применить систему управления, особенно при небольших размерах манжеты, рекомендуется выполнять вышеописанную ручную процедуру заполнения воздухом до подключения линии 11 накачки/сдувания ЛМ к системе управления фиг. 2. На фиг. 2 подразумевают, что вход 11' контроля воздуха включает подходящие средства для разъемного присоединения к линии 11 накачки/сдувания ЛМ фиг. 1; а удлинительное гибкое соединение или линия 11 В имеет (I) конец системного соединителя (не показан), который разъемно подключается к входу 11', контроля и (II) конец ЛМ-соединителя, совместимо присоединенного таким образом, чтобы совместно функционировать с концом соединителя средства обратного клапана 11 А, чтобы поддерживать состояние линий 11/11 В постоянно открытым каналом связи системы с накачиваемым средством 19 ЛМ. Средство перемещения воздуха включает в себя шприцевое средство,имеющее форму твердого корпуса 25, выполненного из материала с низким трением, такого как PTFE (Тефлон) с цилиндрическим отверстием 26 с открытым (или с приливом) торцом для взаимодействия со средством поршня 27. Корпус 25 прикреплен к элементу каркаса 28 и продольно вытянут в сторону закрытого торца (или головки), снабженного входным штуцером 29,соединенным прямым каналом со средством 11' накачки/сдувания ЛМ; в этом прямом канале первый нормально закрытый соленоидный клапан VI необходимо включить в открытое состояние, если воздух для заполнения должен пройти в любом направлении между цилиндром 26 и надуваемым/сдуваемым средством 19 ЛМ. Поршень 27 жестко установлен на или выполнен в виде единого целого с передним торцом продолговатого стержня 30, задний торец которого зажат в ползун 31. Ползун 31 образует жесткий поперечно-смещенный рычаг с продольно-стабилизированной направляющей 9 планкой 32 и реверсивным приводом для перемещения в продольном направлении средством 33 рамочного электрического шагового двигателя и выходной осью 34 его ходового винта; причем ось 34 снабжена резьбовым соединением с отверстием 34' наподобие гайки в жестком поперечно-смещенном рычаге ползуна 31, и,предпочтительно, резьбовое отверстие 34' сформировано в корпусе из PTFE, закрепленном на ползуне 31. Направляющее средство 32 является схематическим обозначением коммерчески доступного узла линейного подшипника (широко распространенного под торговой маркойRollon), в котором продолговатый первый элемент дорожки качения прикреплен к элементу рамки, а продолговатый второй элемент дорожки качения прикреплен к ползуну 31, и в котором соответствующие элементы дорожек качения разделены с помощью антифрикционных элементов, таких как шарики подшипника,которые перекатываются по указанным элементам. Описанное устройство продольного суппорта и направляющих, основанное на средстве 32, как станет ясно ниже, обеспечивает прецизионное продольное перемещение поршня 27 вдоль центральной продольной оси цилиндрического отверстия 26, причем ползун 31 и поршень 27 эффективно закреплены от вращения вокруг ходового винта. Средство двигателя 33 выбрано из множества шаговых двигателей, в которых прецизионное направленное управление осуществляют с помощью вариации относительных сигналов возбуждения на каждой из четырех входных клемм двигателя. Количеством оборотов оси 34(и, следовательно, перемещением поршня 27) управляют с помощью контроллера двигателя и средства привода 47, как показано на фиг. 2. Обозначения на фиг. 2 содержат общую длину L хода поршня 27 в отверстии 26 с целью подачи воздуха заполнения из отверстия 26 в накачиваемое/сдуваемое кольцо или манжету 19 ЛМ, пока соленоидный клапан VI находится во включенном состоянии открытым; эта же длина доступна для втягивания поршня 27, посредством чего контролируемое количество воздуха заполнения могут извлечь из манжеты 16. Фиксировано установленные конечные переключатели LS1 и LS2 схематически показаны знаками стрелок на фиг. 2, что обозначает стопорное и/или реверсное устройство в каждой из предельных точек в продольном направлении на общем расстоянии L хода поршня. Однако, как показано на фиг. 2, поршень 27 смещен на расстояние L за пределы цилиндрического отверстия, а стрелка, обозначенная LSO, указывает на точку, в которой язычок или иное активирующее переключатель устройство 37, расположенное на штоке 30 поршня, взаимодействует с конечным переключателем LSO, чтобы электрически или иным образом подать сигнал о том, что достигнуто втянутое положение поршня, изо 001833 10 браженное на чертеже, чему сопутствует прекращение импульсов привода от схемы привода на фиг. 3; удобно и предпочтительно, чтобы конечные переключатели были оптическим устройством, основанным на том, что язычок или иное активирующее устройство 37 является непрозрачным, и, следовательно, способно прервать поток света от источника в направление фотоэлемента, в каждой точке соответственно,где должно произойти событие, соответствующее ограничению переключения. Кроме того, как показано на фиг. 2, передний конец штока 30 поршня снабжен радиальным фланцевым образованием 38, скрытым по окружности упругим колпачком 39, снабженным внутренней выточкой, которая легко защелкивается, образуя упругое соединение с фланцевым образование 38, чтобы при техническом обслуживании устройства можно было заменять использованный колпачок 39 новым колпачком 39. Некоторые операции регулирования давления могут вызывать эффект возникновения помех при измерении изменений давления, отражающих мышечный рефлекс пациента. Система согласно данному изобретению сконструирована таким образом, чтобы минимизировать такие помехи за счет самой концепции конструкции, состоящей в том, что это система с по существу замкнутым объемом, в которой подстройку отклонений давления манжеты 19 производят приращениями перемещений внутри общего объема воздуха, т.е. между (I) объемом перед поршнем 26 внутри передней части цилиндра и (II) объемом манжеты 19. Это имеет преимущества перед системами, которые регулируют давление с помощью аккумулятора или резервуара с повышенным давлением для компенсации изменений давления в манжете за счет введения воздуха из аккумулятора или выпуска воздуха в атмосферу. Повышенная стабильность системы, к которой приводит использование в системе согласно изобретению концепции общего объема,позволяет получить высокую степень точности без колебаний или перерегулирования в системе. Конкретно, на каждом шаге шагового двигателя 33 перемещается около 0,0005 мл (0,5 мкл) воздуха. Такая производительность в настоящее время недоступна для систем аккумуляторного типа с повышенным давлением. Устройство на фиг. 2 также включает в себя следующие элементы: первый Р 1 и второй Р 2 преобразователи для наблюдения давления. Эти преобразователи давления, которые указывают общее давление в устройстве, подключены для резервированного мониторинга давления воздуха в линии между штуцером 29 цилиндра и первым нормально закрытым соленоидным клапаном V1. Второй нормально закрытый соленоидный клапан V2 показан подключенным к воздухово 11 ду между штуцером 29 цилиндра и первым соленоидным клапаном V1. При включении в открытое состояние клапан V2 образует путь от своего открытого конца 44 в воздуховод от штуцера 29 цилиндра к первому соленоидному клапану так, чтобы при закрытом, выключенном состоянии клапан V1 и при включенном открытом клапане V2, перемещение справа налево поршня 27 в цилиндрическом отверстии 26 вызывало приток свежего воздуха (из окружающей среды) в описанную систему. Аналогично, при том же положении обоих клапанов V1 и V2 (V2 включен, а V1 - в нормально закрытом состоянии) перемещение поршня 27 слева направо в отверстии 26 выпустит излишек воздуха или газа из системы. Также и аналогично при нормально закрытом состоянии клапана V2 и при включенном,открытом состоянии клапана V1 перемещение справа налево поршня 27 извлечет воздух из средства 19 ЛМ (и тем самым сдует его). И при том же состоянии - клапан V1 выключен, а клапан V1 включен, - перемещение поршня 27 введет воздух в средства 19 ЛМ. Сигналы управления, необходимые для включения клапанов V1 иV2, вырабатывают раздельные выходы базовых сигналов программного задания последовательности из отдельного средства микропроцессора контроллера 60 для запуска, центрирования и сброса. А. 1. Запуск системы. Для целей запуска и центрирования системы схему управления фиг. 3 обходят, и входами контроллера шагового двигателя и усилителя 47 управляют с помощью контроллера 60, предназначенного для запуска, центрирования и сброса. Как показано на фиг.4, обход схемы управления фиг. 3 осуществляют с помощью двух однополюсных двухпозиционных переключателей 42. Работа переключателей 42 происходит при первоначальной подаче питания на устройство, при этом инициируют последовательность запуска. Работой шагового двигателя 33 управляют во время выполнения последовательности запуска контроллером (60) запуска, центрирования и сброса. Прежде чем приступить к иллюстративному описанию автоматической работы системы регулирования по фиг. 1 и 2, отметим, что, исходя из практических соображений, система должна быть совместимой с подходящими по размеру ЛМ для пациентов любых возрастов,что требует переменного объема заполнения кольца 19, который может изменяться в соотношении 10:1. Имеющиеся в настоящее время размеры на выбор анестезиологу следующие: Размер 1 (малый грудничковый), максимальный объем заполнения 4 см 3. Размер 1.5 (больший грудничковый), максимальный объем заполнения 6 см 3. Размер 2.0 (малый детский), максимальный объем заполнения 10 см 3. 12 Размер 2.5 (больший детский), максимальный объем заполнения 14 см 3. Размер 3.0 (малый взрослый), максимальный объем заполнения 20 см 3. Размер 4.0 (средний взрослый), максимальный объем заполнения 30 см 3. Размер 5.0 (большой взрослый), максимальный объем заполнения 40 см 3. В настоящее время предпочтительно конструировать объемную вместимость отверстия 26 шприца около 20 см 3 в промежутке между срабатываниями LS1 и LS2 соответственно в крайних положениях хода поршня L в отверстии 26; при диаметре отверстия 26 в 24 мм объемную вместимость 20 см 3 достигают при величине полного хода поршня L около 45, которую можно принять в качестве иллюстрации диапазона перемещений системы. Далее, в качестве иллюстрации, для шагового двигателя 33, рассчитанного на 1600 импульсных шагов на один оборот ходового винта 34 и шага подачи винта(т.е. перемещения за один оборот) 2 мм, пригодный диапазон L перемещения поршня 27 потребует 36000 дискретных шаговых приращений; в целях первоначальной установки следует применить рекомендованную быструю частоту повторения импульсных шагов 5000 Гц, чтобы получить скорость перемещения поршня 6,25 мм/с. Для нормальных перемещений при регулировании давления следует применить рекомендованную медленную частоту повторения импульсных шагов 500 Гц, чтобы получить скорость перемещения поршня 0,625 мм/с. Ниже объясняется, что все автоматические корректировки при регулировании давления предпочтительно производить приращениями перемещения поршня, причем приращение начинается от средней точки полезного диапазона L,так чтобы указанный диапазон регулирования нормально достигался за 18000 импульсов двигателя 33, вызывая тем самым вытеснение объема, по меньшей мере, 10 см 3 в направлении заполнения ЛМ воздухом или в направлении сдувания ЛМ, по необходимости. Для автоматического регулирования заполнения ЛМ воздухом до установленного давления указанные пределы диапазона, как обнаружили, пригодны для всех вышеперечисленных размеров ЛМ,даже несмотря на то, что диапазон объемов заполнения около 10:1. Выше уже было рекомендовано подключать систему, изображенную на фиг. 1 и 2, к заполняемым воздухом средствам 19 ЛМ (в точке 11') только после проведения обычной процедуры использования ручного шприца (не показан) для вакуумирования средства 19 для введения ЛМ пациенту, а затем использования этого же шприца для заполнения воздухом, причем оператор производит заполнение воздухом, руководствуясь своим опытом, чтобы добиться правильно расположенного уплотнения средст 13 вом 19 области вокруг входа гортани при дистальном соприкосновении с входом пищевода. Предпочтительным способом первоначального заполнения кольца 19 JIM воздухом является для анестезиолога использование шприцевого средства. Независимо от того, заполнили надувное кольцо 19 ЛМ вручную или нет, система, изображенная на фиг. 1, 2 и 3, способна быстро войти в режим регулирования со слежением по давлению в надувном кольце 19 до заданного значения, под которым понимают желаемое значение SP давления уставки (например, 50 см вод.ст.), отображаемое на дисплее 49. Хотя система 10 управления ЛМ способна выполнить задачу первоначального заполнения воздухом манжеты, такое первичное заполнение воздухом с помощью системы 10 может быть пригодно на практике только для манжет небольшого объема, и в настоящее время не является предпочтительным. Таким образом, когда выберут и установят пороговое заданное значение давления SP системы фиг. 2 и 3, начинают программную работу контроллера 60 (для запуска, центрирования и сброса), управляющего начальной последовательностью запуска. Контроллер 60, как показано на фиг. 4, включает в себя алгоритм включения клапана V2 в открытое состояние, оставляя клапан V1 в выключенном (и, следовательно,нормально закрытом) состоянии. После этого посылают импульсы с высокой частотой (5000 Гц) через контроллер и привод 47 шагового двигателя, побуждая двигатель 33 перемещать с высокой скоростью поршень 27 из выдвинутого положения, определяемого взаимодействием язычка 37 с конечным переключателем LSO. Поршень 27 быстро проходит полную длину хода (L) поршня 27 в отверстии 26 слева направо. По ходу этого движения язычок 37 вступит во взаимодействие с конечным переключателемLS1, что вызовет в контроллере и приводе 47 шагового двигателя подсчет числа импульсов,необходимого для перемещения поршня в зависимости от L. Подсчет прекратится только когда язычок 37 активизирует конечный переключатель LS2, в каковой точке полный отсчет вводят в память контроллера 60, и производят автоматическую операцию деления на 2, причем половинное значение вводят в память контроллера 60, а также вводят в память контроллера и привода 47 шагового двигателя. После этого контроллер и привод 47 шагового двигателя будет выполнять каждую последующую команду двигателю 33 для независимого отслеживания положения поршня 27. Затем контроллер 60 посылает сигнал к началу движения в противоположном направлении с той же высокой скоростью до тех пор,пока счетчик импульсов не достигнет значения,соответствующего достижения поршнем 27 среднего положения (или L/2). Клапан V2 затем 14 выключают, возвращая его в нормальнозакрытое состояние. Оба переключателя 42 на фиг. 4 затем одновременно переходят от первого (1) положения ко второму (2) положению, позволяя тем самым контроллеру 46 с нечеткой логикой, изображенному на фиг. 3, приступить к управлению двигателем 33. Контроллер с нечеткой логикой 46 работает в соответствии с логическими правилами, установленными ниже, в табл.1, вырабатывая сигнал, необходимый для продолжения движения поршня 27 в направлении слева направо до тех пор, пока давление в переднем конце цилиндра 26 не станет равным предварительно запрограммированному проверочному значению, обычно 20 см вод.ст.; и когда это значение будет достигнуто, по причинам, объясненным в следующем разделе, поршень 27 будет и далее приводиться в движение до тех пор, пока не будет достигнуто значение уставкиSP. Контроллер 60 затем включит клапан V1,переводя его в открытое состояние. В случае, если контроллеру 60 (для запуска, центрирования и сброса) не удастся получить указание на то, что достигнуто запрограммированное проверочное давление за установленное число шагов шагового двигателя (33)(например, могут установить, что запрограммированное проверочное давление должны достигать до того, как оцениваемое по количеству шагов перемещение поршня 27 потребует одну восьмую часть (1/8) расстояния L), то подадут звуковой и визуальный тревожный сигнал, и система запретит автоматическую работу системы. А.2 Аварийный режим. Во время обычной работы системы может быть включен аварийный режим при значительном отклонении в показаниях резервированных датчиков давления. Давление измеряют резервированными преобразователями давления Р 1 и Р 2, с которых независимо полученные отсчеты давления непрерывно сравнивают средством сравнения А 40. Аппаратный сигнал ошибкиHW вырабатывается в случае, когда обнаружится разность между Р 1 и Р 2, существенно превышающая ноль. Этот аппаратный сигнал ошибки издается в форме звукового и визуального извещения, предупреждающего анестезиолога о необходимости приступить к ручному управлению заполнением ЛМ воздухом. Затем,через малый промежуток времени после подачи аппаратного сигнала ошибки средство сравнения А 40 перейдет в аварийный режим работы, закрыв клапана V1 и V2, чтобы удержать давление в манжете ЛМ. Б. Нормальное управление системой. Работа контроллера с нечеткой логикой описана с помощью логических правил, установленных ниже в табл. 1. Первые два столбца в табл.1 отражают предыдущее давление и текущее давление, по сравнению с SP. Как отмечено на фиг. 3 В, время задержки между первым и вторым столбцами составляет полсекунды (1/2). Последний столбец в табл.1 отображает команду, которую обычно будет вырабатывать контроллер с нечеткой логикой 46 для контроллера 47 двигателя. Поскольку во время нормальной работы шаговый двигатель 33 работает только с малой скоростью, нечеткие команды вырабатываются в терминах направления и числа (N) шагов. Описанный процесс регулирования давления, производимый контроллером с нечеткой логикой, предпочтительно производят в рабочем диапазоне, заданном полосой 0,5 см вод.ст. в каждую сторону от уставки SP. Таблица 1. Работа контроллера с нечеткой логикой 46 Предыдущее действующее давление по отношению к уставке Текущее действующее давление по отношению к уставке Решение в шагах (N) и направление Большое количество шагов, реверс Большое количество шагов, реверс Малое количество шагов,реверс Минимальное количество шагов, двунаправленное Малое количество шагов,вперед Большое количество шагов, вперед Большое количество шагов, вперед В. Типичная форма сигнала анестезированного пациента. На фиг. 5 показана форма сигнала дыхания, которую система в соответствии с данным изобретением использует как для регулирования давления ЛМ манжеты 19, так и для мониторинга давления заполнения ЛМ. Пациента в данном примере подвергают хирургическому вмешательству и механической вентиляции, т.е. вентиляция пациента является результатом положительного давления, воздействующего через трубку 14 воздуховода, называемую также пульсирующей вентиляцией с положительным давлением, или ПВПД. Фиг. 5 изображает способность устройства, соответствующего изобретению, следить за колебаниями (отклонениями) от уставки SP (50 см вод. ст. в данном примере),в котором эти колебания происходят с частотой приблизительно 12 циклов в минуту, что является типичной величиной респираторного цикла нормально анестезированного взрослого пациента. Обнаружили, что такой дыхательный поток через трубку 14 воздуховода, спонтанный или за счет ПВПД, будет оказывать влияние,вызывающее ЛМ-манжету 19 испытывать регулярные циклы сжатия/расширения. Одной из целей системы в соответствии с данным изобретением является измерение величины как цикла 16 сжатия, так и расширения, а также обнаружение отклонений от таких циклов сжатия/ расширения, которые можно определить как показатели болевых стимулов. Хотя на фиг. 5 имеется некоторое общее увеличение огибающей сигнала(как изображено на фиг. 5 и будет объяснено ниже в разделе, посвященном автоматическому масштабированию), на фиг. 5 пока еще нет никаких признаков болевой стимуляции. На фиг. 5 А изобразили пример, в котором пациент испытывает болевую стимуляцию, которую система в соответствии с изобретением обнаружит и сообщит о ней с помощью процедур подачи тревожного сигнала, что поясняется ниже. График на фиг. 5 А иллюстрирует борьбу противоположных усилий при отклонении от точки равновесия из-за реакции на болевой стимул указанного персонажа. Первое основывается на памяти системы, которая, в соответствии с изобретением, находится в нормальном режиме регулирования, по мере сил справляясь со своей задачей, основываясь на регулярной выборке (с 0,5 секундным интервалом) результатов измерений давления (например, Р 1) по отношению к уставке SP, и используя эти показания для определения и осуществления необходимого смещения поршня 27. Форма отклонений давления,вызванных нейромускулярными причинами,повторяющая болевой стимул, и перемещения поршня, которые система вызывает, и которые могут превосходить способность описанного механизма отслеживать изменения, могут, следовательно, создавать возмущения формы давления в то время, когда режим регулирования пытается самовосстановиться. Нормальный режим регулирования и нейромускулярная система пациента будут стремиться адаптироваться к измененным и изменяющимся условиям, к которым может привести нейромускулярный отклик пациента на углубляющую (спасательную) дополнительную дозу анестезии. Г. Функция мониторинга. Фиг. 3, 5 и 5 А и графики и таблицы на фигурах 6 А, 6 В, 6 С и 6D служат для иллюстрации двух методов автоматического управления, с помощью которых устройство, изображенное на фиг. 1, 2 и 3, может сигнализировать анестезиологу о том, что в ходе хирургической операции анестезированного пациента пациент проявил ранний нейромускулярный отклик на болевой стимул, который не может быть блокирован при действующем уровне анестезии пациента, даже несмотря на то, что пациент пока в достаточной мере заторможен, находится в бессознательном состоянии или не осознает болевой стимуляции. Такой нейромускулярный отклик показывает анестезиологу, участвующему в операции, что у пациента сокращаются мышцы в гортани и пищеводе - явление, указывающее на начальную стадию процесса пробуждения пациента, - с потенциально опасными последствиями в слу 17 чае, если хирургическую процедуру еще не закончили. Хотя известно, что пациент под воздействием общей анестезии становится нечувствительным к болевым стимулам, обнаружили такую чувствительность, особенно активную и легче наблюдаемую в мышечной системе, окружающей вход гортани и область входа в пищевод. Кроме того, обнаружили, что такая активность этих мышечных систем варьируется в зависимости от глубины анестезии, и ее можно наблюдать по изменениям давления в заполненной воздухом ЛМ-манжете 19, которая находится в упругом тесном прижатии к указанным мышечным системам. Конкретнее, аномальные результаты измерений давления на выходе компаратора 40 А давления распознают с помощью компараторов В 57, С 58 и D 59 на фиг. 3, вырабатывая выходные сигналы тревоги А 1 и А 2. Заполненное воздухом кольцо или манжета 19 введенной ЛМ является, таким образом, средством раннего обнаружения локализованного нейромускулярного отклика, отличимого от неожиданной реакции регулирующей функции описываемой системы, так как то же явление наблюдается при возмущенной нерегулярной форме отклонений давления на фиг. 5 А,на котором скобка и надпись обозначают период болевой стимуляции, случившейся во время хирургической процедуры. Фиг. 7 отображает эмпирические значения изменяющихся флуктуаций давления, которые наблюдали, когда анестезиолог специально позволял пациенту частично прийти в сознание от глубокой анестезии, при этом подразумевается,что график, аналогичный фиг. 7, в реальном времени отображался на мониторе 49 во время хирургической процедуры. Изменения давления отображаются по ординате в см водного столба,при избранной уставке SP на уровне 60 см вод. ст. На фиг. 7 изображены события, которые происходили ближе к завершению хирургической процедуры, в которой пациента, обозначенного как Пациент 5, подвергли анестезии непрерывной подачей пропофола, распространенного и обыкновенного анестетика. На фиг. 7 можно различить три особых временных интервала, каждый из этих интервалов соответствует изменению в количестве вводимого пациенту 5 анестетика. В первый период, начавшийся на 68-ой минуте, непрерывное введение пропофола прекратили. Впоследствии в первом периоде легко наблюдать значительное увеличение активности мышц в области гортани/зева, прилегающей к ЛМ-манжете 19. Было обнаружено, что корреляция увеличившейся мышечной активности (в области гортани/зева) с глубиной анестезии пациента позволяет получить значительный положительный эффект для поддержания надлежащего уровня анестезии в ходе хирургических и других операций. Использование ЛМ-устройства и аппара 001833 18 туры для мониторинга обеспечивает средства,благодаря которым такие наблюдения могут с высокой надежностью производиться при дополнительном преимуществе - пациента не повергают воздействию дополнительных интрузионных устройств. Во время второго периода, отмеченного на фиг. 7, начало которого пришлось приблизительно на 72-ю минуту, анестезиолог вновь начал введение пропофола. Третий период на фиг.7, начинающийся приблизительно на 73-й минуте, указывает на момент, когда введение пропофола вновь прекратили, и пациенту дали возможность полностью пробудиться. Заметим,что после приблизительно 82-й минуты измерения не фиксировали, т.к. в это время ЛМ удалили из области гортани пациента. События, отображенные на фиг.7, дают ясное представление о том, что система мониторинга в соответствии с изобретением функционирует на таком уровне чувствительности,который позволяет обнаружить мышечную активность, свидетельствующую о процессе пробуждения. Г.1 Автоматическая сигнализация тревоги. Ниже описаны две методики, рекомендуемые для автоматической интерпретации аномалии, описанной на фиг.5 А. Эти сигналы тревоги могут быть предназначены для наблюдения со стороны анестезиолога для немедленного или раннего распознавания аномального давления,которое наблюдают как симптом, вызванный ранней начальной стадией процесса пробуждения пациента. Обе методики основаны на установлении границ (порогов) отклонений с каждой стороны нормальной формы дыхательного сигнала и сравнении давления ЛМ (в кольце 19) с этими пределами; эти последние изображены как верхний и нижний пороги Е 1 и Е 2 на фиг. 5 и 5 А, и названы окно сигнала проверки анестезии. Как показано на фиг. 3, Е 1 и Е 2 - это величины, которые автоматически сравниваются с каждым отклонением сигнала давления для выработки тревожных сигналов А 1 и А 2 уровня анестезии. Присутствующий на операции анестезиолог может индивидуально выбирать, т.е. изменять Е 1 и Е 2 с помощью устройства 10 мониторинга. А 1 является сигналом тревоги мгновенного действия, включаемым всякий раз, когда форма дыхательного сигнала отклоняется за верхний или нижний пределы окна сигнала проверить анестезию, ограниченного Е 1 и Е 2. Тревожный сигнал А 1 первого предупреждения включают при любом единичном отклонении за пределы окна сигнала проверить анестезию. Тревожный сигнал А 1 подают анестезиологу в звуковой форме. Как только анестезиолога предупредят таким образом, он может предпринять немедленные корректирующие действия, например, увеличить силу анестетика, вводимого пациенту. 19 Тревожный сигнал А 2 является сигналом,имеющим отношение к оценочному значению,определяемому (I) относящимся к окну значением ЕТ (описанным ниже) и (II) рассчитанным средним значением ( Y ), основанным на последовательных выборках обнаруженного сигнала переменного давления заполнения ЛМ, причем выборку производят с интервалом 0,1 с, и эффективно интегрируют все последовательные значения и сохраняют абсолютные значения в матричной схеме пословного суммирования, как показано на фиг. 3, причем величину каждого из абсолютных значений принимают относительно базовой линии покоя, за которую удобно взять значение уставки, как показано на фиг. 6 А и 6 В. Если среднее значение, т.е. сумма последних тридцати двух интегрированных отсчетов, деленная на 32 (61, фиг. 3 А, превосходит величину ЕТ, как поясняется ниже, будет подан тревожный сигнал А 2 анестезиологу, например,таким образом; ПРОВЕРЬТЕ АНЕСТЕЗИЮ комбинацией визуальных и/или звуковых сигналов. Таким образом, анестезиологу дополнительно сообщается о необходимости немедленных корректирующих действий, например, усиления анестетика, вводимого пациенту. ЕТ вычисляют путем сложения абсолютных значений Е 1 и Е 2 и деления суммы на выбранную константу k, т.е.: где k - избранное значение в диапазоне от 3 до 6(предпочтительно 4), причем поясняется, что при k=4 взаимосвязь деление на 4 устанавливает предпочтительный на практике фактор безопасности, благодаря которому тревожный сигнал ПРОВЕРЬТЕ АНЕСТЕЗИЮ достоверно подается даже в тех, когда сигнал А 1 моментального действия не подан. Как показано на фиг. 3, по завершении каждого 3,2 секундного периода выборки, самый старый отсчет удаляется из массива, а последний отсчет включается в новый расчет среднего значения для следующего 32-отсчетного сравнения с ЕТ. Так, например, аномалия, изображенная на фиг. 5 А, иллюстрирующая событие, наблюдаемое при болевой стимуляции во время хирургической процедуры, как станет видно, приведет к увеличению оценочных показателей значительно выше, чем в нормальной ситуации, изображенной на фиг. 5. Если первичная выборка пересечет одну из границ окна допуска, будет выключен первый сигнал А 1, а второй сигнал А 2,может не быть включен сразу. Однако интегрирование и вычисление среднего значения, описанное выше, может привести к включению тревожного сигнала А 2 ПРОВЕРИТЬ АНЕСТЕЗИЮ, даже если превышение допуска,необходимое для включения первого тревожного сигнала А 1, не произошло. В дополнение к этим двум тревожным сигналам, анестезиолог 20 может наблюдать постоянный ход событий в форме процента пробуждения, который могут отображать как показано на фиг.1 В, что описано ниже в разделе, озаглавленном Свойства отображения. Хотя график фиг. 5 А отражает взаимодействие различных реакций, особо отметим тот факт, что когда такие реакции обнаруживаются,больших отклонений от уставки SP избегают в течение 30 с благодаря быстрому введению дополнительной анестезии. Г.2 Свойства отображения. Дисплей 49 включает окно временной развертки с непрерывным изменяющимся сигналом, таким как показан на фиг. 5, 5 А, 6 В, 6D и 7,причем отображаются регулируемые отклонения давления за последнюю полную минуту,которые попадают в окно со стороны левого поля, и выходят за пределы видимости со стороны правого поля окна. Еще один способ отображения описанного выше процесса интегрирования/суммирования(среднего значения) показан на фиг. 1 А и фиг. 1 В, на которых эти два отображения в разные моменты времени показывают прогресс от глубокого уровня анестезии, изображенного на первом примере фиг. 1 А, до начального уровня приближения к пробуждению, изображенного на втором примере фиг. 1 В. Дисплей предпочтительно состоит из столбиковой диаграммы,которая показывает в процентной шкале выходное значение последовательно интегрируемой функции, описанной выше. Начальное значение этого постоянно обновляемого дисплея устанавливают для каждого отдельного пациента, предпочтительно после того, как анестезированного пациента расположили на операционном столе,готовым к операции. Параметр, эквивалентный 100% показаниям дисплея, равен полной величине ЕТ, при которой будет издан тревожный сигнал ПРОВЕРИТЬ АНЕСТЕЗИЮ. Кроме того, для использования анестезиологом и/или другим медиком, изучающим конкретную хирургическую процедуру, предусмотрена возможность подключения отдельного микропроцессора или иных средств представления данных к компьютерному интерфейсу 41,тем самым предоставляя возможность мониторинга, записи и анализа системных индикаторов на отдельных электронных носителях, например, если требуется усложненная запись или анализ. Г.3 Автоматическое масштабирование окна сигнала тревоги. Обнаружено, что функцию мониторинга системы в соответствии с изобретением можно сделать более эффективной за счет того, что окну тревожного сигнала "проверить анестезию" дадут возможность автоматически уменьшаться (или автоматически масштабироваться),тем самым предоставляя дополнительное преимущество ускоренной настройки порога сигна 21 лизации (т.е. Е 1 и Е 2), и, следовательно, более точного мониторинга уровня анестезии. Для достижения такого автоматического масштабирования окна тревожного сигнала проверить анестезию измеряется наибольшая и наименьшая амплитуды для, по меньшей мере, восьми последовательных волн, усредняются и определяются средние значения наибольшей и наименьшей амплитуды. Для проверки амплитудных значений используют две проверки; все восемь измеренных наибольших и наименьших значений должны быть получены за один двухминутный период, и малые колебания которые могли бы быть приняты за пиковые значения,устраняются за счет ручного ввода заданной минимальной амплитуды. Эти наибольшая и наименьшая амплитуды определяют, в сущности, огибающую, которая обычно уменьшается в соответствии с расслаблением пациента при вентиляции положительным давлением (ПВПД) по мере того, как анестезия пациента увеличивается. Рассматривая пользу от перенастройки порогов сигнализации в плане соответствия огибающей с уменьшающейся амплитудой (или размером) , необходимо помнить, что дыхательное давление пациента обычно уменьшается по мере того, как пациент расслабляется. Ограничение порогов сигнализации (т.е. Е 1 и Е 2), как обнаружено, является эффективным и желательным методом для автоматического повторного определения чувствительности устройства мониторинга, так чтобы последствия болевой стимуляции продолжали обнаруживаться, несмотря на уменьшение размеров огибающей. Из соображений безопасности, предпочтительное устройство допускает функции автоматического масштабирования только уменьшать,но не увеличивать автоматически окно тревожного сигнала проверить анестезию. Величина,на которую автоматическое масштабирование может изменять Е 1 и Е 2 полностью поддается регулировке от нуля до ста процентов, при заданном по умолчанию значении 50%. Интересно отметить, что такое автоматическое масштабирование часто проводит к тому, что Е 1 и Е 2 перестают быть симметричными относительно уставки SP, аналогично окну тревожного сигнала, изображенному на фиг. 6 В. Г.4 Система повторного центрирования. Как описано выше, система в соответствии с изобретением автоматически компенсирует утечки и подсосы в воздухе для заполнения, за которым производят слежение. Поскольку контроллер и привод 47 шагового двигателя поддерживает подсчет дирекционных команд, поданных на шаговый двигатель 33, привод 47 шагового двигателя способен, и производит,индикацию при достижении поршнем 27 конца пути перемещения. Эта индикация переключит переключатели 42 в положение 1 и инициирует запуск функции сброса под управлением 22 контроллера 60 для запуска, центрирования и сброса. В зависимости от команды сброса, посланной контроллером 47, т.е. когда аномальные условия потребуют пополнения или выпуска воздуха, контроллер 60 предпримет необходимые действия. Например, когда функция сброса требует, чтобы воздух добавили в систему, контроллер 60 выполнит следующее: (I) выключит соленоидный клапан V1, возвращая его в нормально закрытое состояние, (II) включит соленоидный клапан V2 в открытое состояние;(III) выдаст необходимые сигналы контроллеру и приводу 47 шагового двигателя, вызывая тем самым перемещение поршня 27 двигателем 33 с высокой скоростью так, чтобы выпустить избыток воздуха (или, при необходимости, добрать дополнительный свежий воздух) через штуцер 44. Память контроллера 60 сохранит после процедуры запуска системы, описанной выше, количество импульсов, необходимое для перемещения поршня 27 в среднее положение(L/2). При нормальном функционировании мониторинга и регулирования описанной системы не будет особой потребности в больших перемещениях поршня 27. Однако большие перемещения могут произойти, например, при потере воздуха, которым заполнена авторегулируемая система, при контакте ЛМ кольца 19 с хирургическим ножом. Это состояние будет обнаружено системой, что вызовет потребность в непрерывной подаче дополнительного воздуха, или в непрерывном отсосе воздуха, в зависимости от того, какой из конечных выключателей LS1 илиLS2 будет активирован язычком 37, свидетельствуя о том, что поршень 27 достиг конца своего полного хода. Сигнал от конечного выключателя приведет к следующему: (I) выключатели 42 организуют обходной путь вокруг схемы управления фиг. 3; (II) выработают аварийное уведомление анестезиологу, например, в звуковой форме с визуальным отображением сообщения ПРОВЕРИТЬ УТЕЧКУ; (III) включат функцию сброса контроллера 60, описанную выше. Приведенное выше описание выявляет дополнительное преимущество автоматического устройства, состоящее в том, что оно, как описано, пополнит объем воздуха в цилиндре 26 за приблизительно 3,6 с, что значительно быстрее,чем это обычно бывает возможно сделать вручную. Несмотря на такое замечательное время автоматического восстановления, корректировки давления, производимые системой, достаточно дискретны для того, чтобы сделать возможным регулирование давления в самых маленьких ЛМ манжетах без нежелательных скачков давления в малом объеме. Все эти операции автоматические, например, подача сигналов и предупреждений, которые являются неотъемлемой частью гарантированного поддержания давления уставки в тече 23 ние всего срока, требуемого обстоятельствами для данного пациента, или для данного размера ЛМ, требуемого пациенту. Заключение Описанное устройство и способ его применения, как будет показано, удовлетворяет всем заявленным задачам изобретения, выступая в качестве устройства управления давлением ЛМ манжеты, в качестве устройства наблюдения и коррекции утечек, в качестве монитора возможных болевых стимулов нейромускулярной системы пациента при анестезии пациента в ходе хирургической процедуры, и в качестве монитора для защиты пациента от ситуации,при которой он остается под воздействием мышечного релаксанта при неадекватной анестезии. В частности: 1. Устройство находится под управлением микропроцессорного устройства, которое выполняет все функции, включая, но не ограничиваясь следующими: диагностические проверки,управление и контроль двигателя и клапанов, и измерение давления. 2. Устройство включает графический дисплей и блок управления, а также интерфейс для упреждающего мониторинга и контроля, позволяя тем самым производить обработку данных различными коммерческими программными продуктами. 3. Устройство производит непрерывное измерение величины давления в ЛМ манжете с помощью резервированных датчиков давления,пневматически связанных с трубопроводом подачи воздуха в ЛМ манжету. В целях обеспечения безопасности измерение давления производится резервированными преобразователями,данные с которых постоянно автоматически подвергаются сравнению. 4. Устройство обычно работает с постоянным объемом воздуха, отыскивая точку поддержания установленного давления заполнения ЛМ манжеты, причем при каждом выборочном измерении давления в ЛМ манжете отклонение от установленного значения вызывает перемещение поршня в направлении уменьшения до нуля (или близкого к нулю значения) отклонения измеренного значения давления от уставки давления. 5. Устройство разъемно подключается к трубопроводу накачки/сдувания воздуха в/из ЛМ таким образом, чтобы дать возможность производить обычную процедуру введения ЛМ пациенту без участия автоматических функций устройства. Вследствие этого, пациента можно подготовить к операции путем введения ЛМ,заполнения манжеты воздухом и проведения всех проверок для гарантии того, что манжету правильно установили, до того, как пациент попадает в операционную, при этом задействуется обратный клапан для удержания давления заполнения воздухом до подключения устройства 24 с пациентом и заполненной воздухом ЛМ манжетой. 6. Если по любой причине система не работает или работает неверно, она перейдет в аварийный режим, при котором операционные клапаны вернутся в нормально закрытое положение, тем самым удерживая давление в заполненной воздухом ЛМ манжете. 7. В нормальном режиме регулирования выборка давления производится системой с периодом в одну десятую (1/10) секунды, что дает достаточно времени для расчета отношения к уставке и подачи серии импульсов для перемещения поршня с целью достижения корректировки измеренного давления до значения, приблизительно равного уставке. Нормальное регулирование происходит, если измеренное выборочное значение давления превышает порог отклонения 0,5 см вод.ст. от настраиваемого значения уставки. 8. Важно подчеркнуть, что нормальное функционирование описанной ЛМ системы предоставляет существенные преимущества,вытекающие из того факта, что система работает с практически замкнутым объемом воздуха. Увеличение измеренного давления быстро вызовет перемещение порции воздуха из ЛМ манжеты в объем, образованный между поршнем и передним концом цилиндра; и этот объем воздуха вернется в ЛМ манжету практически в тот же момент, когда обнаружится, что измеренное давление уменьшилось. Такое объединение объемов всегда остается в силе, за исключением случаев, когда из-за утечки или иного неожиданного события поршень достигает крайнего положения, что отслеживается с помощью счетчика положения, который устроен в контроллере шагового двигателя, или при достижении одного из конечных выключателей, в такой ситуации поршень переместится при одновременном выпуске или заборе воздуха, в зависимости от ситуации, причем при этом ЛМ сможет сохранять свое заполненное воздухом давление. 9. Обнаружено, что после того, как описываемая система перейдет в стабильный режим,она является чувствительной к очень малым изменениям давления (порядка 1/16 см вод.ст.),может давать очень быстрый и точный отклик без искажения своей функции слежения постоянными времени или гистерезисными переходами. Считается, что такой отклик достигается благодаря описанному шаговому двигателю и приводу с помощью ходового винта в сочетании с обычными регулирующими перемещениями в практически замкнутом объеме воздуха. Расчет на практически замкнутый объем воздуха означает введение только одной постоянной времени при увеличении или уменьшении давления внутри ЛМ манжеты. 10. В помощь анестезиологу, в ходе хирургической процедуры, описанная система позволяет выполнять несколько рабочих алгоритмов 25 одновременно, в реальном времени или в масштабе времени, близком к реальному, учитывая начальные и полностью бессознательные мышечные симптомы анестезированного пациента при пробуждении от индуцированного сна и/или парализованного состояния, за счет чувствительного отклика на мышечную деятельность, наблюдаемую в области гортани пациента и/или в области соприкосновения с входом пищевода пациента. Предусмотрены средства для звуковой и визуальной сигнализации анестезиологу об обнаружении приближающегося пробуждения пациента, для своевременного принятия мер проверки анестезии и проведения корректирующих действий до пробуждения пациента. Описанная система показала, что ей присуща способность к адаптации с высокой точностью при определении потери анестезии,поскольку она последовательно сужает область восприятия в заданных пределах безопасности при оценке наблюдаемых отклонений давления заполнения ЛМ. 11. Функция мониторинга описанной системы может быть полезна при обнаружении и обеспечении мер защиты от ситуации, когда пациент, которому ввели одновременно анестетик и отдельный мышечный релаксант (например, атракурим или векурониум), израсходовал анестетик, но сохранил обездвиженность из-за продолжающегося действия мышечного релаксанта самого по себе. Такие обстоятельства, как известно, очень неприятны, так как пациент не способен выразить, что он чувствует в полной мере все воздействия от хирургических манипуляций. ЛМ-мониторинговая система может быть полезной в качестве защиты от такого случая,ввиду того, что некоторые мышечные релаксанты оказывают ограниченное воздействие на мышцы, сокращающие пищевод, с которым обязательно соприкасается ЛМ манжета 19, обладающая способностью наблюдения за мышечной деятельностью. Некоторые исследователи наблюдали, что кривая сокращения сокращающих мышц пищевода неизменна в течение частичного паралича, вызванного распространенными мышечными релаксантами. См. Эрикссон и др., Функциональная оценка зева в покое и при глотании у частично парализованных людей; Анестезиология, том 87, 5, ноябрь 1997. 12. Дополнительно отмечается, что хотя мониторинг и другие функции обнаружения описанной системы предпочтительны в рамках отклика заполненной воздухом полости ЛМ,контекст ЛМ носит чисто иллюстративный характер, имея в виду применение подходящего накачиваемого устройства в полости гортани,способного к отклику на мышечную активность в области соприкосновения накачанного материала с одной или несколькими областями мышечной активности, и выдачи соответствующих сообщений. 26 13. Дополнительно также отмечается, что предпочтительные числовые значения, приведенные здесь, такие как 4, 8, 32 и т.д., носят чисто иллюстративный характер, и они избраны потому, что являются степенями числа 2, имея в виду предпочтительное отношение к работе цифровой системы. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство (10) для автоматического мониторинга уровня бессознательности у пациента (13) в ходе хирургической процедуры, в котором введенное пациенту накачиваемое устройство (19) имеет контакт через стенку, по меньшей мере, с частью гортани пациента и в котором накачиваемое устройство содержит гибкую трубчатую линию (11) для заполнения воздухом, доступ к которой возможен вне пределов организма пациента, причем устройство содержит(а) средство восприятия, включающее преобразователь давления (P1, Р 2), разъемно присоединяемый к линии для заполнения воздухом для получения выходного электрического сигнала, соответствующего непрерывно воспринимаемому давлению заполнения в функции времени в течение хирургической процедуры;(б) средство, включающее шприц, имеющий цилиндр (26) с передней частью, предназначенной для разъемного соединения (11') с линией заполнения воздухом, и поршень (27) в цилиндре для задания, по существу, постоянного объема воздуха заполнения внутри накачиваемого устройства, его линии для заполнения и передней части цилиндра, причем поршень установлен с возможностью перемещения относительно цилиндра для изменения пропорции объемов воздуха между накачиваемым устройством и передней частью цилиндра;(в) средство сравнения воспринимаемого давления с опорным значением для определения отклонения от опорного значения; и(г) средство регулирования, содержащее реверсивно работающее средство привода (33) для перемещения поршня в цилиндре для возврата давления на опорную величину. 2. Устройство по п.1, в котором введенное устройство является ЛМ-устройством (12), содержащим трубку (14) воздуховода с маской(16) и надувной манжетой (19) на дистальном конце для образования плотного прилегания вокруг входа гортани (21) пациента, причем связь с легкими пациента осуществляется через трубку воздуховода и маску, а с надувной манжетой связана гибкая линия для заполнения воздухом. 3. Устройство по п.2, включающее средство (60) микропроцессора, запрограммированное для определения отдельно верхнего и нижнего допустимых пределов воспринимаемого давления воздуха и выработки выходного сообщения 27 об обнаружении ситуации, когда давление выходит за один из этих пределов. 4. Устройство по любому из пп.1-3, дополнительно содержащее средство отображения,оперативно присоединенное к средству восприятия для получения отображения воспринимаемого давления заполнения в зависимости от времени. 5. Устройство по п.4, в котором средство отображения содержит визуальный выход, отображающий для заданного интервала времени амплитуду давления в виде переменной ординаты, непрерывно проходящей от одного предела заданного интервала времени до другого, причем текущее и последнее наблюдаемое давление отображены у одного предела, а заданные верхний и нижний допустимые пределы отображены в виде отдельных горизонтальных линий над и под отображением воспринимаемого давления заполнения воздухом. 6. Устройство по любому из пп.1-5, в котором реверсивно работающее средство привода содержит двигатель (33), присоединенный для реверсивного привода к ходовому винту (34) и средству гайки (34'), имеющему резьбовое соединение с ходовым винтом, причем средство гайки направлено продольно и закреплено от вращения, а также соединено для непосредственного продольного перемещения поршня в цилиндре. 7. Устройство по любому из пп.1-5, в котором реверсивно работающее средство привода содержит шаговый двигатель (33) с цифровым управлением и в котором выход воспринимаемого давления представлен в форме первого цифрового сигнала, опорное значение представлено в форме второго цифрового сигнала, а средство сравнения содержит микропроцессор,запрограммированный для подачи цифровых сигналов для работы двигателя. 8. Устройство по любому из пп.1-7, в котором передняя часть цилиндра выполнена с возможностью разъемного соединения с линией заполнения воздухом через средство клапана(V1), работающего между открытым состоянием для допуска соединения между накачиваемым устройством и передней частью цилиндра и закрытым состоянием. 9. Устройство по п.8, которое также содержит второе средство клапана (V2), присоединенное к передней части цилиндра и работающее между открытым состоянием для допуска соединения с атмосферой и закрытым состоянием. 10. Устройство по п.9, в котором каждый клапан является нормально закрытым соленоидным клапаном, причем первый клапан электрически присоединен к средству управления с возможностью регулирования давления в накачиваемом устройстве, а второй клапан электрически присоединен к средству управления с возможностью автоматического выпуска или 28 впуска воздуха при поддержании, по существу,постоянного распределенного коллективно объема воздуха внутри накачиваемого устройства и передней части цилиндра. 11. Устройство по п.10, включающее средство добавления воздуха для допуска заданного количества атмосферного воздуха в цилиндр,причем средство добавления воздуха содержит средство конечного выключателя (LS2),вырабатывающее электрический сигнал при восприятии условий, указывающих на перемещение поршня на заданную глубину в переднюю часть цилиндра, и в соответствии с пределом допустимого хода поршня в передней части; и средство, содержащее микропроцессор,реагирующий на сигнал восприятия глубины поршня, причем микропроцессор запрограммирован таким образом, чтобы(I) возвратить первый соленоидный клапан(II) включить второй соленоидный клапан(V2) в открытое состояние и затем работать со средством привода для осуществления заданного обратного перемещения, впуская тем самым свежий воздух из атмосферы в цилиндр; и(III) выключить второй соленоидный клапан и включить средство сравнения для восстановления заданного значения давления внутри цилиндра перед повторным включением первого соленоидного клапана и возврата средства сравнения в режим регулирования давления заполнения воздухом на уровне заданного значения. 12. Устройство по п.10 или 11, включающее средство выпуска воздуха для выпуска заданного количества воздуха из цилиндра, причем средство выпуска воздуха содержит средство конечного выключателя (LS1),вырабатывающее электрический сигнал при восприятии условия, указывающего на перемещение поршня на заданную глубину в фланцевую часть цилиндра в соответствии с пределом допустимого хода поршня; и средство, включающее микропроцессор, реагирующий на сигнал восприятия глубины поршня, причем микропроцессор запрограммирован так, чтобы(I) возвратить первый соленоидный клапан(II) включить второй соленоидный клапан(V2) в открытое состояние и затем работать средством привода для осуществления прямого перемещения на заданное расстояние, выпуская тем самым заданное количество воздуха из цилиндра, и(III) выключить второй соленоидный клапан и включить средство сравнения для восстановления заданного значения давления внутри цилиндра перед повторным включением первого соленоидного клапана и возврата средства сравнения в режим регулирования давления заполнения воздухом на уровне заданного значения. 13. Устройство по любому из пп.1-12, в котором волюметрическая емкость перемещения цилиндра составляет порядка 20 см 3. 14. Способ мониторинга уровня бессознательности пациента в ходе хирургической про цедуры у пациента, при котором пациенту вводят накачиваемое устройство (19), имеющее контакт через стенку, по меньшей мере, с частью гортани пациента, и используют устройство в соответствии с любым из пп.1-13. Пример отображения функции процент пробуждения Фиг. 1 А Пример отображения функции процент пробуждения
МПК / Метки
МПК: A61M 16/04
Метки: мониторинг, ларингеальная, управление, дыхательных, устройством, маска, путей
Код ссылки
<a href="https://eas.patents.su/18-1833-monitoring-i-upravlenie-ustrojjstvom-laringealnaya-maska-dlya-dyhatelnyh-putejj.html" rel="bookmark" title="База патентов Евразийского Союза">Мониторинг и управление устройством ларингеальная маска для дыхательных путей</a>
Ларингеальная маска
Номер патента: 980
Опубликовано: 28.08.2000
Автор: Шимченко Александр Эмильевич
МПК: A61C 19/08, A61M 16/06
Метки: маска, ларингеальная
Формула / Реферат:
1. Ларингеальная маска для орофарингеального общего обезболивания, содержащая трубку-воздуховод, один из концов которого имеет коннектор для присоединения к наркозному аппарату и установленную на воздуховоде манжету для тампонирования глотки, отличающаяся тем, что манжета выполнена из монолитного легкодеформируемого материала и установлена на воздуховоде с возможностью перемещения, а между манжетой и коннектором на воздуховоде установлена...
Управление выкачиванием текучих сред из многочисленных скважин посредством эвм
Номер патента: 1831
Опубликовано: 27.08.2001
Авторы: Стин Генри Б.III, Смит Джон В., Корлью Эдвард А.
МПК: F04F 1/06
Метки: выкачиванием, текучих, управление, скважин, сред, эвм, многочисленных, посредством
Формула / Реферат:
1. Насос для удаления текучей среды из стволов скважин при достижении жидкостью предварительно определенного уровня, содержащий удлиненный корпус насоса, имеющий внутреннюю сторону, наружную сторону, первый конец и второй конец, впускную камеру, расположенную рядом с вторым концом корпуса насоса и имеющую впускные отверстия для текучей среды для протекания текучей среды в впускную камеру, систему клапана, проходящую от второго конца корпуса...
Управление передаваемой мощности на основе контрольного сигнала
Номер патента: 1633
Опубликовано: 25.06.2001
Авторы: Тидманн Эдвард Г., Вилленеггер Серж, Оденвальдер Джозеф П., Джоу Ю-Чеун
МПК: H04Q 7/20, H04B 7/005
Метки: управление, контрольного, мощности, передаваемой, сигнала, основе
Формула / Реферат:
1. Способ выполнения управления передаваемой мощности сигнала обратной линии связи, обрабатываемого с использованием методики многостанционного доступа с кодовым разделением каналов и передаваемого с мощностью обратной линии связи, в котором сигнал обратной линии связи имеет канал трафика, передаваемый с мощностью передачи канала трафика, и контрольный канал, передаваемый с мощностью передачи контрольного канала, содержащий стадии, на которых...
Управление процессом зарядки аккумуляторной батареи и его завершением
Номер патента: 240
Опубликовано: 25.02.1999
Авторы: Центер Борис, Подражански Юри М.
МПК: H02J 7/10
Метки: завершением, аккумуляторной, зарядки, управление, батареи, процессом
Формула / Реферат:
1. Способ зарядки аккумуляторной батареи, в соответствии с которым подают зарядный импульс, который обеспечивает средний зарядный ток, подают первый деполяризующий импульс, выдерживают первую паузу, измеряют напряжение батареи в заданной точке в первой паузе, подают второй деполяризующий импульс, выдерживают вторую паузу, измеряют напряжение батареи в упомянутой заданной точке во второй паузе, определяют разность между напряжением в заданной...
Буровая система с устройством для крепления к буровой скважине и способы начала и завершения бурильного прохода с ее использованием
Номер патента: 1110
Опубликовано: 30.10.2000
Автор: Бест Брюно
МПК: E21B 4/18
Метки: бурильного, крепления, использованием, завершения, скважине, система, устройством, прохода, начала, способы, буровой, буровая
Формула / Реферат:
1. Система сверхглубокого бурения для бурения скважины в земной коре, содержащая бурильное долото (11), двигатель (10) для привода бурильного долота (11), достигающее поверхности удлиненное тело (1), гидравлическое цилиндропоршневое устройство (7, 9), способное создавать заданную нагрузку на долото и соединенное только с одним первым выбранным элементом - цилиндром (7) или поршнем (9) цилиндропоршневого устройства, бурильное долото (11),...