Система и способ интерпретации данных процесса бурения
Формула / Реферат
1. Способ идентификации потенциальных осложнений в процессе бурения скважины, в котором измеряют параметр бурения; сопоставляют параметр бурения с глубиной в скважине, которую проходят выбранные компоненты бурильной колонны; определяют изменения измеряемого параметра при каждом прохождении выбранными компонентами бурильной колонны выбранных глубин в скважине и генерируют предупредительный сигнал в ответ на определенные изменения измеряемого параметра.
2. Способ по п.1, отличающийся тем, что определяют режим бурения и сопоставляют измеряемый параметр с временными периодами, при которых режим бурения одинаков.
3. Способ по п.2, отличающийся тем, что режим бурения включает по меньшей мере один из следующих режимов: спуск, подъем, промывка ствола, откачка, расширение скважины при движении вниз и расширение скважины при движении вверх.
4. Способ по п.1, отличающийся тем, что измеряемый параметр включает по меньшей мере один из следующих параметров: параметр, связанный с нагрузкой на крюке, параметр, связанный с крутящим моментом, параметр, связанный со скоростью вращения бурильной колонны, параметр, связанный с давлением бурового раствора, и параметр, связанный со скоростью блока.
5. Способ по п.1, отличающийся тем, что генерируют предупредительный сигнал в случае превышения параметром выбранного порогового значения или в случае превышения изменением параметра выбранного порогового значения.
6. Способ определения потенциальных осложнений в процессе бурения скважины, в котором определяют временные периоды прорабатывания ствола скважины бурильной системой; измеряют по меньшей мере один из следующих параметров: параметр, связанный с вращением бурильной колонны, параметр, связанный с осевым движением бурильной колонны, и параметр, связанный с давлением бурового раствора во время прорабатывания; генерируют предупредительный сигнал в случае превышения по меньшей мере одним из указанных параметров выбранного порогового значения во время прорабатывания ствола скважины; определяют значения по меньшей мере одной из разностей между максимальным и минимальным измеренным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора при каждом расширении ствола скважины бурильной системой; и генерируют сигнал, по существу, о полном завершении прорабатывания ствола скважины в случае падения выбранными значениями разности между максимальным и минимальным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора ниже выбранного порогового значения.
7. Способ по п.6, отличающийся тем, что параметр, связанный с вращением бурильной колонны, включает крутящий момент.
8. Способ по п.6, отличающийся тем, что параметр, связанный с осевым движением, включает нагрузку на крюке.
9. Способ по п.6, отличающийся тем, что давление бурового раствора включает давление в затрубном пространстве или давление в стояке.
10. Способ определения потенциальных осложнений в процессе бурения скважины, в котором определяют периоды статического состояния бурильной системы, когда буровые насосы не работают, а бурильная колонна неподвижна; в период, следующий за периодом статического состояния бурильной системы, когда бурильная система возобновляет движение бурильной колонны и работу бурового насоса, измеряют по меньшей мере один из следующих параметров: максимальный момент, максимальная нагрузка на крюке и максимальное давление бурового раствора; и генерируют предупредительный сигнал в случае превышения по меньшей мере одним из указанных параметров соответствующего выбранного порогового значения.
11. Способ по п.10, отличающийся тем, что по меньшей мере один из следующих параметров: ожидаемая нагрузка на крюке, ожидаемый момент и максимальное безопасное давление бурильного раствора определяют по математической модели бурильной системы и скважины.
12. Машиночитаемый носитель, на который записана программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: измерение параметра бурения; сопоставление измеренного параметра бурения с глубиной в скважине, которую проходят выбранные компоненты бурильной колонны; определение изменений измеряемого параметра при каждом прохождении выбранными компонентами бурильной колонны выбранных глубин в скважине; и генерирование предупредительного сигнала в ответ на определенные изменения измеряемого параметра.
13. Носитель по п.12, отличающийся тем, что программа содержит логику, при исполнении которой компьютер определяет режим бурения и сопоставляет измеряемый параметр с временными периодами, при которых режим бурения одинаков.
14. Носитель по п.13, отличающийся тем, что режим бурения включает по меньшей мере один из следующих режимов: спуск, подъем, промывка ствола, откачка, расширение скважины при движении вниз, расширение скважины при движении вверх.
15. Носитель по п.12, отличающийся тем, что измеряемый параметр включает по меньшей мере один из следующих параметров: параметр, связанный с нагрузкой на крюке, параметр, связанный с крутящим моментом, параметр, связанный со скоростью вращения компонента бурильной колонны, параметр, связанный с давлением в стояке, параметр, связанный с давлением бурового раствора, и параметр, связанный со скоростью блока.
16. Носитель по п.12, отличающийся тем, что при исполнении программы генерируется предупредительный сигнал в случае превышения параметром выбранного порогового значения или в случае превышения изменением параметра выбранного порогового значения.
17. Машиночитаемый носитель, на который записана программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: определение временных периодов прорабатывания ствола скважины бурильной системой; измерение по меньшей мере одного из следующих параметров: параметр, связанный с вращением бурильной колонны, параметр, связанный с осевым движением бурильной колонны, и параметр, связанный с давлением бурового раствора; генерирование предупредительного сигнала в случае превышения по меньшей мере одним из параметров выбранного порогового значения во время прорабатывания ствола скважины; определение значения по меньшей мере одной из разностей между максимальным и минимальным измеренным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора при каждом расширении ствола скважины бурильной системой; и генерирование сигнала, по существу, о полном завершении прорабатывания ствола скважины в случае падения выбранными значениями разности между максимальным и минимальным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора ниже выбранного порогового значения.
18. Носитель по п.17, отличающийся тем, что параметр, связанный с вращением бурильной колонны, включает крутящий момент.
19. Носитель по п.17, отличающийся тем, что параметр, связанный с аксиальным движением, включает нагрузку на крюке.
20. Носитель по п.17, отличающийся тем, что давление бурового раствора включает давление в затрубном пространстве или давление в стояке.
21. Машиночитаемый носитель, на который записана компьютерная программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: определение периодов статического состояния бурильной системы, когда буровые насосы не работают, а бурильная колонна неподвижна; в период, следующий за периодом статического состояния бурильной системы, когда бурильная система возобновляет движение бурильной колонны и работу бурового насоса, измерение по меньшей мере одного из следующих параметров: максимальный момент, максимальная нагрузка на крюке и максимальное давление бурового раствора; и генерирование предупредительного сигнала в случае превышения по меньшей мере одним из указанных параметров соответствующего выбранного порогового значения.
22. Носитель по п.21, отличающийся тем, что по меньшей мере один из следующих параметров: ожидаемая нагрузка на крюке, ожидаемый момхэт или максимальное безопасное давление бурового раствора определяется по математической модели бурильной системы и скважины.

Текст
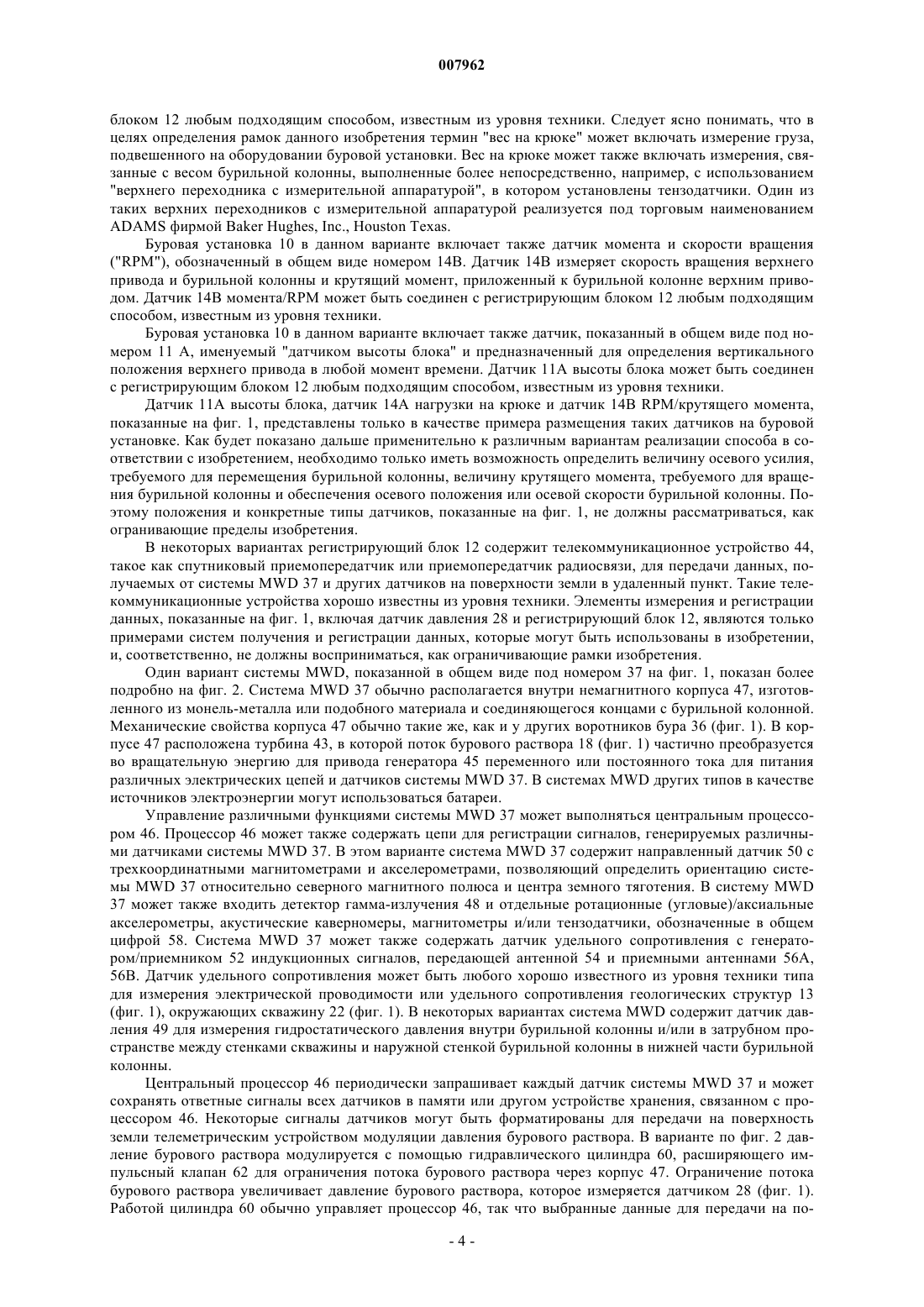
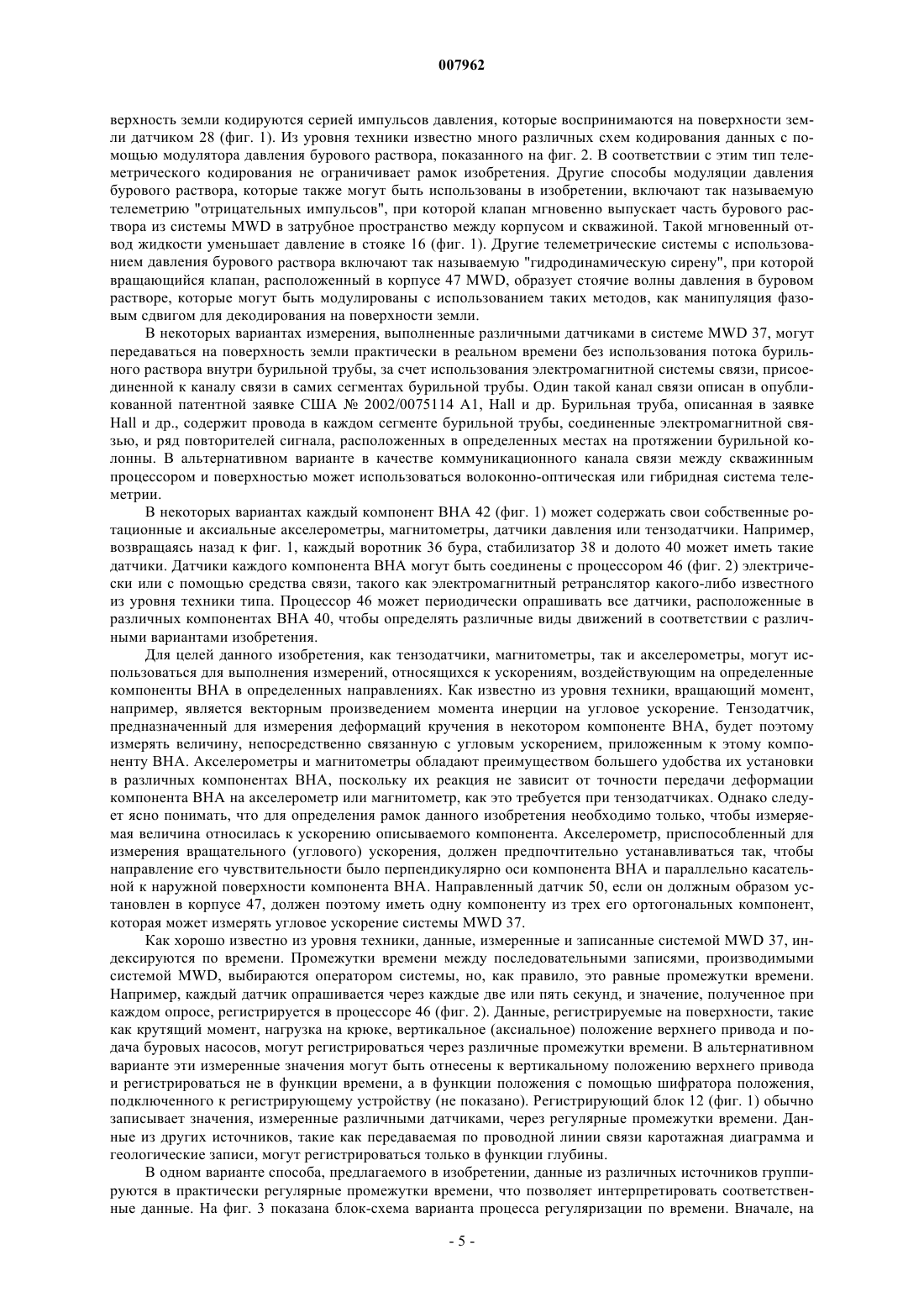
007962 Ссылка на связанные заявки Приоритет истребован по предварительной заявке США 60/374117, поданной 19 апреля 2002 г. Заявление о федеральном финансировании исследований или разработок Неприменимо. Область техники, к которой относится изобретение Изобретение в целом относится к области бурения скважин в земле. Более конкретно, изобретение относится к системам и способам сбора данных, относящихся к бурению скважин, обработки данных в процессе их сбора в соответствии с различными аспектами бурения, и определению возможности обнаружения отдельных осложнений в процессе бурения посредством анализа обработанных таким образом данных. Предшествующий уровень техники Бурение скважин в земле включает "роторное" бурение, при котором к буровому станку или подобному подъемному приспособлению подвешена бурильная колонна. Бурильная колонна вращает буровое долото, расположенное на конце бурильной колонны. Оборудование, входящее в состав бурового станка,и/или гидравлический двигатель, расположенный в бурильной колонне, вращает долото. В станке имеется подъемное устройство, к которому подвешена бурильная колонна так, чтобы к буровому долоту было приложено заданное аксиальное усилие, когда долото вращается. Вследствие сочетания аксиального усилия с вращением долота долото выдалбливает, выскабливает и/или дробит скальную породу, пробуривая в ней скважину. Обычно буровой станок содержит жидкостные насосы для закачивания внутрь бурильной колонны жидкости, именуемой "буровым раствором". Буровой раствор в конечном счете выливается через сопла или промывочные каналы в буровом долоте. Буровой раствор поднимает буровой шлам из скважины и выносит его на поверхность земли для удаления. В других типах буровых установок в качестве текучей среды для подъема бурового шлама и охлаждения долота может использоваться сжатый воздух. Буровой раствор создает также гидростатическое давление, препятствующее нерегулируемому поступлению жидкости в скважину из полостей пор пробуриваемой породы ("выбросу"), и содержит материалы, образующие непроницаемый барьер ("глинистую корку") для уменьшения ухода бурового раствора в проницаемые породы, когда гидростатическое давление в скважине превышает давление жидкости в земной породе, препятствуя тем самым "поглощению бурового раствора". Процесс бурения скважин в земле включает ряд различных операций, выполняемых оперативным персоналом буровой установки, помимо упомянутого вращения и аксиального продвижения бурового долота. Требуется, например, добавлять сегменты бурильной трубы к бурильной колонне, чтобы иметь возможность углублять скважину за пределами существующей длины бурильной колонны. Необходимо также, например, время от времени заменять буровое долото вследствие того, что оно изношено и не может более эффективно бурить земную породу. Эти примеры не являются исчерпывающим списком таких не бурильных операций, выполняемых обычно на буровой установке, но они упомянуты здесь,чтобы показать ограничения известных устройств для регистрации и анализа данных процесса бурения. Системы регистрации и анализа данных процесса бурения, известные из уровня техники, регистрируют измерения, выполняемые в функции времени различными датчиками на буровой установке, а в некоторых случаях датчиками, расположенными в бурильной колонне. Регистрация положения бурильной колонны в скважине также производится в функции времени (индексация времени и глубины). Обычно в известных системах зарегистрированные данные и зарегистрированные индексы время/глубина используются для получения окончательной единственной записи бурильной операции и данных, измеренных датчиками в функции глубины, где представленные данные монотонно возрастают с глубиной. Например, измерения, выполняемые датчиками в бурильной колонне "во время бурения", обычно представляются только в окончательной записи для первого раза, когда каждый такой датчик проходит каждую глубину в скважине. Данные, измеренные при последующем движении определенных датчиков через определенные интервалы глубины, могут не включаться в окончательную запись. Однако, как хорошо известно из уровня техники, значительную часть времени в процессе бурения глубина скважины на самом деле вовсе не возрастает монотонно, так как в это время могут производиться операции, при которых, например, бурильная колонна извлекается из скважины, многократно перемещается вверх и вниз или остается на неизменной глубине, продолжая вращаться, а бурильный раствор продолжает циркулировать. Операции, производимые на бурильной установке, при которых не происходит монотонного увеличения глубины с течением времени, могут свидетельствовать об опасных ситуациях, таких как прихват трубы, выброс или потеря бурового раствора ("поглощение бурового раствора"). Известные системы записи данных бурения не используют эффективным образом параметры бурения,измеренные во время не бурильных операций, для идентификации и снижения вероятности осложнений в процессе бурения. Известно также, что некоторые параметры бурения, измеренные в процессе не бурильных операций, к которым относится, например, извлечение бурильной колонны из скважины, "подъем", ввод бурильной колонны в скважину, "опускание" и добавление сегмента бурильной трубы к бурильной колонне, чтобы можно было продолжать бурение, "наращивание", могут изменяться со временем вследствие-1 007962 изменения ситуации в скважине. Например, формация, гидростатическое давление в которой существенно ниже гидростатического давления в скважине, может вызывать образование на стенках скважины толстой "глинистой корки", то есть сжатых твердых частиц бурильного раствора. Со временем эта глинистая корка может стать такой толстой, что будет трудно извлечь бурильную колонну из скважины, или возникнет опасность прихвата бурильной колонны в скважине. К бурильным параметрам, которые могут изменяться со временем, могут относиться, например, усилие, требующееся для извлечения бурильной колонны из скважины, крутящий момент, требуемый для преодоления трения в скважине и возобновления роторного бурения после наращивания, и гидростатическое давление в скважине, вызванной движением бурильной колонны вдоль скважины ("свабовое" и "импульсное" давления). Желательно иметь систему, которая регистрирует бурильные параметры в функции времени, определяет глубину бурильной колонны в скважине в функции времени, автоматически регистрирует текущие операции, производимые на буровой установке, анализирует данные с учетом выполняемых операций и снабжает оператора скважины и/или оператора буровой установки указаниями об опасной ситуации в скважине, когда бурильные параметры изменяются со временем. Сущность изобретения В одном аспекте изобретение относится к способу идентификации потенциальных осложнений в процессе бурения скважины. Способ, соответствующий этому аспекту изобретения, включает измерение параметра бурения, сопоставление параметра бурения с глубиной в скважине, которую проходят выбранные компоненты бурильной колонны, определение изменений измеряемого параметра при каждом прохождении выбранными компонентами бурильной колонны выбранных глубин в скважине, и генерирование предупредительного сигнала в ответ на определенные изменения измеряемого параметра. В следующем аспекте изобретение относится к другому варианту способа определения потенциальных осложнений в процессе бурения скважины. Способ, соответствующий этому аспекту изобретения, включает определение периодов прорабатывания ствола скважины бурильной системой. Во время прорабатывания ствола скважины измеряют по меньшей мере один из следующих параметров: параметр,связанный с вращением бурильной колонны, параметр, связанный с осевым движением бурильной колонны, и параметр, связанный с давлением бурового раствора во время прорабатывания. Генерируют предупредительный сигнал в случае превышения по меньшей мере одним из параметров выбранного порогового значения во время операций по расширению ствола скважины бурильной системой. В дальнейшем аспекте изобретение относится к способу определения, достаточно ли время прорабатывания ствола скважины в процессе бурильных операций для безопасного продолжения бурения перед наращиванием бурильной колонны. В способе, соответствующем этому аспекту изобретения, перед выполнением очередного наращивания бурильной колонны измеряют продолжительность прорабатывания ствола скважины. Во время прорабатывания ствола скважины измеряют крутящий момент. Разность между максимальным и минимальным значениями измеренного момента сопоставляют с продолжительностью прорабатывания ствола скважины при каждом наращивании. Минимальную безопасную продолжительность прорабатывания ствола скважины определяют по результатам сравнения, когда измеренная разность моментов становится меньше выбранного порогового значения. В еще одном аспекте способ согласно изобретению включает определение продолжительности каждого периода операций бурения, которые бурильная система выполняет при прорабатывании ствола скважины, измерение после каждой проработки системой ствола скважины по меньшей мере одного из следующих параметров: максимальный избыточный момент, максимальный перетяг и максимальное давление бурового раствора, и генерирование предупредительного сигнала в случае превышения по меньшей мере одним из указанных параметров выбранного порогового значения. Дальнейшие аспекты изобретения включают компьютерные программы, записанные на машиночитаемых носителях. Компьютерные программы содержат логику, при исполнении которой программируемый компьютер осуществляет операции, включая описанные выше в других аспектах изобретения. Другие аспекты и преимущества изобретения будут понятны из нижеследующего описания и формулы изобретения. Краткое описание чертежей На фиг. 1 показана типичная схема бурения скважины. На фиг. 2 - часть типичной системы MWD. На фиг. 3 - блок-схема примерного процесса упорядочивания данных в функции времени относительно общей временной базы. На фиг. 4 - блок-схема примерного процесса упорядочивания данных в функции глубины относительно общей базы глубины. На фиг. 5 - блок-схема примерного процесса упорядочивания атрибутов данных, таких как первое или последнее на определенной глубине и максимальные и минимальные значения параметров при определенной глубине или определенном времени. На фиг. 6 и 7 - примеры сравнения данных для одного интервала глубины, полученных в разное время, чтобы определить изменение рабочих параметров бурения. На фиг. 8 - блок-схема примерного процесса для определения режима бурения.-2 007962 На фиг. 9 показана блок-схема одного из вариантов способа определения, было ли завершено прорабатывание ствола скважины перед наращиванием. На фиг. 10 - блок-схема одного из вариантов способа определения опасной ситуации при возобновлении бурения после наращивания. На фиг. 11 - блок-схема одного из вариантов способа определения максимального безопасного времени в местах контакта с плашками захвата и времени без прокачивания бурового раствора по замкнутой системе и минимального безопасного времени прорабатывания ствола скважины. На фиг. 12 - блок-схема одного из вариантов способа определения максимальной безопасной "скорости блока". Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 показана типичная система бурения скважины, которая может применяться с различными вариантами способа в соответствии с изобретением. В буровом станке 10 имеется буровая лебедка 11 или аналогичное подъемное устройство, известное из уровня техники, для поднятия, удержания и опускания бурильной колонны. Бурильная колонна содержит ряд свинченных секций бурильной трубы, обозначенной в целом под номером 32. Самая нижняя часть бурильной колонны носит название оборудования низа бурильной колонны (ВНА) 42, к самому нижнему концу которого в варианте, изображенном на фиг. 1,прикреплено буровое долото 40, предназначенное для прохождения сквозь земные породы 13 под поверхностью земли. ВНА 42 может также содержать различные устройства, такие как утяжеленная бурильная труба 34 и воротники 36 бура. ВНА 42 может также содержать один или несколько стабилизаторов 38 с установленными на них лопастями для удержания ВНА 42 приблизительно в центре скважины 22 во время бурения. В различных вариантах один или несколько воротников 36 бура могут содержать датчики для скважинных исследований во время бурения (MWD) и блок телеметрии по гидроимпульсному каналу связи. Вс вместе это называется "системой MWD" и обозначено цифрой 37. Назначение системы MWD 37 и входящих в нее датчиков будет объяснено далее со ссылками на фиг. 2. Буровая лебедка 11 управляется во время активного бурения так, чтобы к буровому долоту 40 было приложено выбранное аксиальное усилие. Это аксиальное усилие, как известно из уровня техники, образуется за счет массы бурильной колонны, значительная часть которой подвешена на буровой лебедке 11. Не подвешенная часть массы бурильной колонны передает аксиальное усилие на долото 40. Долото 40 вращается при вращении трубы 32 с использованием втулки бурового ротора/ведущей бурильной трубы(не показана на фиг. 1), или предпочтительно верхнего привода 14, или силового вертлюга любого типа,хорошо известного из уровня техники. Когда труба 32 вращается, а, значит, вращается ВНА 42 и долото 40, насос 20 откачивает буровой раствор ("шлам") 18 из котлована или бака 24 и поднимает его по стояку или шлангам к верхнему приводу 14, так что буровой раствор 18 прокачивается через сегменты труб 32,а затем через ВНА 42. В конце концов буровой раствор 18 выпускается через сопла или промывочные каналы (не показаны) в долоте 40, где он поднимает выбуренную горную породу (не показана) на поверхность земли через затрубное пространство между стенками скважины и наружной стенкой трубы 32 и ВНА 42. Затем буровой раствор 18 поднимается через кондуктор 23 к устью скважины и/или обратной линии 26. После удаления выбуренной горной породы с использованием фильтрующих устройств (не показаны на фиг. 1) буровой раствор возвращается в бак 24. Стояковая система или стояк 16 в данном варианте включает датчик давления 28, генерирующий электрические или другие сигналы, соответствующие давлению бурового раствора в стояке 16. Датчик давления 28 оперативно подключен к устройствам (не показаны отдельно на фиг. 1) в регистрирующем блоке 12 для дешифровки, регистрации и интерпретации сигналов, поступающих от системы MWD 37. Как известно из уровня техники, система MWD 37 содержит устройство, которое будет описано ниже со ссылками на фиг. 2, для модуляции давления бурового раствора 18 и передачи данных на поверхность земли. В некоторых вариантах способа согласно изобретению давление, измеренное датчиком 28, используется в регистрирующем блоке для обнаружения различного рода осложнений в процессе бурения. В некоторых вариантах измерение давления может использоваться также для того, чтобы установить,работает ли буровой насос 20 или выключен, а это позволяет установить, какую конкретную операцию выполняет буровая установка в данный момент времени. Пример определения операции, осуществляемой на буровой установке, будет показан ниже со ссылками на фиг. 8. Датчик может быть соединен с регистрирующим блоком 12 любым подходящим способом, известным из уровня техники. В данном варианте буровая установка имеет датчик, обозначенный в общем виде номером 14 А и называемый "датчиком нагрузки на крюке", который измеряет параметр, связанный с грузом, подвешенным на буровой лебедке 11 в некоторый момент времени. Этот измеряемый вес известен из уровня техники как "вес на крюке". Как известно из уровня техники, когда бурильная колонна соединена с верхним приводом 14, вес на крюке, измеряемый датчиком 14 А нагрузки на крюке, включает вес бурильной колонны и вес верхнего привода 14. Во время операций на буровой установке, при которых верхний привод 14 отсоединяется от бурильной колонны, вес, измеряемый датчиком 14 А нагрузки на крюке, будет практически включать только вес верхнего привода. Как будет показано ниже со ссылками на фиг. 9-12,такие измерения могут свидетельствовать о том, что на буровой установке идут определенные операции,например "сидение в клиньях". Датчик 14 А нагрузки на крюке может быть соединен с регистрирующим-3 007962 блоком 12 любым подходящим способом, известным из уровня техники. Следует ясно понимать, что в целях определения рамок данного изобретения термин "вес на крюке" может включать измерение груза,подвешенного на оборудовании буровой установки. Вес на крюке может также включать измерения, связанные с весом бурильной колонны, выполненные более непосредственно, например, с использованием"верхнего переходника с измерительной аппаратурой", в котором установлены тензодатчики. Один из таких верхних переходников с измерительной аппаратурой реализуется под торговым наименованиемADAMS фирмой Baker Hughes, Inc., Houston Texas. Буровая установка 10 в данном варианте включает также датчик момента и скорости вращения("RPM"), обозначенный в общем виде номером 14 В. Датчик 14 В измеряет скорость вращения верхнего привода и бурильной колонны и крутящий момент, приложенный к бурильной колонне верхним приводом. Датчик 14 В момента/RPM может быть соединен с регистрирующим блоком 12 любым подходящим способом, известным из уровня техники. Буровая установка 10 в данном варианте включает также датчик, показанный в общем виде под номером 11 А, именуемый "датчиком высоты блока" и предназначенный для определения вертикального положения верхнего привода в любой момент времени. Датчик 11 А высоты блока может быть соединен с регистрирующим блоком 12 любым подходящим способом, известным из уровня техники. Датчик 11 А высоты блока, датчик 14 А нагрузки на крюке и датчик 14 В RPM/крутящего момента,показанные на фиг. 1, представлены только в качестве примера размещения таких датчиков на буровой установке. Как будет показано дальше применительно к различным вариантам реализации способа в соответствии с изобретением, необходимо только иметь возможность определить величину осевого усилия,требуемого для перемещения бурильной колонны, величину крутящего момента, требуемого для вращения бурильной колонны и обеспечения осевого положения или осевой скорости бурильной колонны. Поэтому положения и конкретные типы датчиков, показанные на фиг. 1, не должны рассматриваться, как огранивающие пределы изобретения. В некоторых вариантах регистрирующий блок 12 содержит телекоммуникационное устройство 44,такое как спутниковый приемопередатчик или приемопередатчик радиосвязи, для передачи данных, получаемых от системы MWD 37 и других датчиков на поверхности земли в удаленный пункт. Такие телекоммуникационные устройства хорошо известны из уровня техники. Элементы измерения и регистрации данных, показанные на фиг. 1, включая датчик давления 28 и регистрирующий блок 12, являются только примерами систем получения и регистрации данных, которые могут быть использованы в изобретении,и, соответственно, не должны восприниматься, как ограничивающие рамки изобретения. Один вариант системы MWD, показанной в общем виде под номером 37 на фиг. 1, показан более подробно на фиг. 2. Система MWD 37 обычно располагается внутри немагнитного корпуса 47, изготовленного из монель-металла или подобного материала и соединяющегося концами с бурильной колонной. Механические свойства корпуса 47 обычно такие же, как и у других воротников бура 36 (фиг. 1). В корпусе 47 расположена турбина 43, в которой поток бурового раствора 18 (фиг. 1) частично преобразуется во вращательную энергию для привода генератора 45 переменного или постоянного тока для питания различных электрических цепей и датчиков системы MWD 37. В системах MWD других типов в качестве источников электроэнергии могут использоваться батареи. Управление различными функциями системы MWD 37 может выполняться центральным процессором 46. Процессор 46 может также содержать цепи для регистрации сигналов, генерируемых различными датчиками системы MWD 37. В этом варианте система MWD 37 содержит направленный датчик 50 с трехкоординатными магнитометрами и акселерометрами, позволяющий определить ориентацию системы MWD 37 относительно северного магнитного полюса и центра земного тяготения. В систему MWD 37 может также входить детектор гамма-излучения 48 и отдельные ротационные (угловые)/аксиальные акселерометры, акустические каверномеры, магнитометры и/или тензодатчики, обозначенные в общем цифрой 58. Система MWD 37 может также содержать датчик удельного сопротивления с генератором/приемником 52 индукционных сигналов, передающей антенной 54 и приемными антеннами 56 А,56 В. Датчик удельного сопротивления может быть любого хорошо известного из уровня техники типа для измерения электрической проводимости или удельного сопротивления геологических структур 13(фиг. 1), окружающих скважину 22 (фиг. 1). В некоторых вариантах система MWD содержит датчик давления 49 для измерения гидростатического давления внутри бурильной колонны и/или в затрубном пространстве между стенками скважины и наружной стенкой бурильной колонны в нижней части бурильной колонны. Центральный процессор 46 периодически запрашивает каждый датчик системы MWD 37 и может сохранять ответные сигналы всех датчиков в памяти или другом устройстве хранения, связанном с процессором 46. Некоторые сигналы датчиков могут быть форматированы для передачи на поверхность земли телеметрическим устройством модуляции давления бурового раствора. В варианте по фиг. 2 давление бурового раствора модулируется с помощью гидравлического цилиндра 60, расширяющего импульсный клапан 62 для ограничения потока бурового раствора через корпус 47. Ограничение потока бурового раствора увеличивает давление бурового раствора, которое измеряется датчиком 28 (фиг. 1). Работой цилиндра 60 обычно управляет процессор 46, так что выбранные данные для передачи на по-4 007962 верхность земли кодируются серией импульсов давления, которые воспринимаются на поверхности земли датчиком 28 (фиг. 1). Из уровня техники известно много различных схем кодирования данных с помощью модулятора давления бурового раствора, показанного на фиг. 2. В соответствии с этим тип телеметрического кодирования не ограничивает рамок изобретения. Другие способы модуляции давления бурового раствора, которые также могут быть использованы в изобретении, включают так называемую телеметрию "отрицательных импульсов", при которой клапан мгновенно выпускает часть бурового раствора из системы MWD в затрубное пространство между корпусом и скважиной. Такой мгновенный отвод жидкости уменьшает давление в стояке 16 (фиг. 1). Другие телеметрические системы с использованием давления бурового раствора включают так называемую "гидродинамическую сирену", при которой вращающийся клапан, расположенный в корпусе 47 MWD, образует стоячие волны давления в буровом растворе, которые могут быть модулированы с использованием таких методов, как манипуляция фазовым сдвигом для декодирования на поверхности земли. В некоторых вариантах измерения, выполненные различными датчиками в системе MWD 37, могут передаваться на поверхность земли практически в реальном времени без использования потока бурильного раствора внутри бурильной трубы, за счет использования электромагнитной системы связи, присоединенной к каналу связи в самих сегментах бурильной трубы. Один такой канал связи описан в опубликованной патентной заявке США 2002/0075114 А 1, Hall и др. Бурильная труба, описанная в заявкеHall и др., содержит провода в каждом сегменте бурильной трубы, соединенные электромагнитной связью, и ряд повторителей сигнала, расположенных в определенных местах на протяжении бурильной колонны. В альтернативном варианте в качестве коммуникационного канала связи между скважинным процессором и поверхностью может использоваться волоконно-оптическая или гибридная система телеметрии. В некоторых вариантах каждый компонент ВНА 42 (фиг. 1) может содержать свои собственные ротационные и аксиальные акселерометры, магнитометры, датчики давления или тензодатчики. Например,возвращаясь назад к фиг. 1, каждый воротник 36 бура, стабилизатор 38 и долото 40 может иметь такие датчики. Датчики каждого компонента ВНА могут быть соединены с процессором 46 (фиг. 2) электрически или с помощью средства связи, такого как электромагнитный ретранслятор какого-либо известного из уровня техники типа. Процессор 46 может периодически опрашивать все датчики, расположенные в различных компонентах ВНА 40, чтобы определять различные виды движений в соответствии с различными вариантами изобретения. Для целей данного изобретения, как тензодатчики, магнитометры, так и акселерометры, могут использоваться для выполнения измерений, относящихся к ускорениям, воздействующим на определенные компоненты ВНА в определенных направлениях. Как известно из уровня техники, вращающий момент,например, является векторным произведением момента инерции на угловое ускорение. Тензодатчик,предназначенный для измерения деформаций кручения в некотором компоненте ВНА, будет поэтому измерять величину, непосредственно связанную с угловым ускорением, приложенным к этому компоненту ВНА. Акселерометры и магнитометры обладают преимуществом большего удобства их установки в различных компонентах ВНА, поскольку их реакция не зависит от точности передачи деформации компонента ВНА на акселерометр или магнитометр, как это требуется при тензодатчиках. Однако следует ясно понимать, что для определения рамок данного изобретения необходимо только, чтобы измеряемая величина относилась к ускорению описываемого компонента. Акселерометр, приспособленный для измерения вращательного (углового) ускорения, должен предпочтительно устанавливаться так, чтобы направление его чувствительности было перпендикулярно оси компонента ВНА и параллельно касательной к наружной поверхности компонента ВНА. Направленный датчик 50, если он должным образом установлен в корпусе 47, должен поэтому иметь одну компоненту из трех его ортогональных компонент,которая может измерять угловое ускорение системы MWD 37. Как хорошо известно из уровня техники, данные, измеренные и записанные системой MWD 37, индексируются по времени. Промежутки времени между последовательными записями, производимыми системой MWD, выбираются оператором системы, но, как правило, это равные промежутки времени. Например, каждый датчик опрашивается через каждые две или пять секунд, и значение, полученное при каждом опросе, регистрируется в процессоре 46 (фиг. 2). Данные, регистрируемые на поверхности, такие как крутящий момент, нагрузка на крюке, вертикальное (аксиальное) положение верхнего привода и подача буровых насосов, могут регистрироваться через различные промежутки времени. В альтернативном варианте эти измеренные значения могут быть отнесены к вертикальному положению верхнего привода и регистрироваться не в функции времени, а в функции положения с помощью шифратора положения,подключенного к регистрирующему устройству (не показано). Регистрирующий блок 12 (фиг. 1) обычно записывает значения, измеренные различными датчиками, через регулярные промежутки времени. Данные из других источников, такие как передаваемая по проводной линии связи каротажная диаграмма и геологические записи, могут регистрироваться только в функции глубины. В одном варианте способа, предлагаемого в изобретении, данные из различных источников группируются в практически регулярные промежутки времени, что позволяет интерпретировать соответственные данные. На фиг. 3 показана блок-схема варианта процесса регуляризации по времени. Вначале, на-5 007962 этапе 144, в регистрирующий блок 12 (фиг. 1) или в другое соответствующим образом запрограммированное устройство (не показано) вводятся данные, зарегистрированные в функции времени. Затем, на этапе 146, введенные данные сортируются в порядке возрастания времени регистрации данных так, чтобы время всех записей монотонно возрастало. На этапе 148 выбирается инкремент времени для конечного выходного файла. Инкремент времени может быть различным в зависимости от типа анализируемых данных, но обычно он составляет от одной до пяти секунд. В пункте 150 все данные группируются в соответствии с выбранным инкрементом времени. Значения данных, регистрируемые реже, чем выбранный интервал времени, можно интерполировать между значениями времени в конечном выходном файле. На фиг. 4 показан пример группирования данных, записанных в функции глубины или в функции времени, если производились записи "время-глубина", для регулярно распределенного по глубине выходного файла. Примерами таких данных могут быть записи в функции времени, произведенные в контроллере системы MWD, которые обычно перегруппировываются по глубине для сравнения с проводными каротажными диаграммами, привязанными к глубине. На этапе 152 в систему вводятся данные,отнесенные к глубине. Поскольку для данных в функции времени соответственные глубины могут случайным образом увеличиваться и уменьшаться с увеличением времени, на этапе 154 до перегруппировки по глубине, выборки данных, отобранные из временных последовательностей сходных бурильных операций, должны быть упорядочены так, чтобы соответственные глубины монотонно возрастали. На этапе 156 выбирается инкремент глубины для конечного выходного файла. Обычно инкремент глубины выбирается в пределах от 0,25 фута до 2 футов. На этапе 158 вводится или определяется на основании записей других данных, сделанных регистрирующей системой, режим бурения. Пример определения режима бурения будет приведен ниже со ссылками на фиг. 8. На этапе 160 введенные данные в функции глубины группируются по выбранным интервалам глубины. Значения данных, регистрируемые в функции глубины реже, чем выбранный интервал глубины, можно интерполировать так, чтобы в конечном выходном файле значения данных были указаны для каждой глубины. На фиг. 5 показан вариант процесса определения, является ли значение некоторого параметра первым или последним в ходе продвижения бурильной колонны по выбранному интервалу глубины, записанным в определенное время или на близкой глубине, и является ли значение некоторого параметра максимальным или минимальным значением определенного параметра в определенное время или на близкой глубине. На этапе 162 данные в функции времени, такие как обрабатываемые в соответствии со способом в примере по фиг. 3, вводятся в систему. На этапе 164 определяется режим бурения. На этапе 166 проверяется, является ли режим бурения особенным режимом бурения, для которого нужно провести сравнение в отношении сходных данных. Если режим бурения не является тем, для которого нужно провести сравнение, то на этапе 178 выбирается следующий инкремент времени, и процесс возвращается к проверке режима бурения на этапе 164 по данным из следующего инкремента времени. Если режим бурения правильный, то на этапе 168 проверяется тип данных. Если данные являются текстовыми или численными, то на этапе 172 данные могут быть проверены, чтобы определить, является ли ввод первым по времени или последним по времени, когда бурильная колонна движется либо вверх, либо вниз по скважине на определенной глубине в выбранном окне интерполяции. При определении первых данных данные в функции времени сканируются вперед во времени относительно либо увеличения, либо уменьшения глубины продвижения, а при определении последних данных данные в функции времени сканируются назад во времени относительно либо увеличения, либо уменьшения глубины продвижения. Если данные являются первыми или последними на этапе 176, то текущие значения данных сохраняются в буфере или регистре. В противном случае процесс переходит к следующему инкременту времени на этапе 178. Если данные числовые, то на этапе 170 значения данных также могут быть проверены, чтобы определить, являются ли они максимальными или минимальными значениями на определенной глубине. Если это так, то на этапе 174 текущие значения данных заменяют прежние максимальные или минимальные значения, хранящиеся в буфере или в регистре. Если текущее значение не является максимумом или минимумом, то процесс переходит к следующему инкременту времени на этапе 178. Вообще говоря,вышеописанный примерный процесс предназначен для того, чтобы разместить в хронологическом порядке данные, полученные приблизительно на одном и том же интервале глубины в скважине, охарактеризованные в соответствии с определенной бурильной операцией или функцией, выполнявшейся во время регистрации или измерения данных. Соответствующая логика для обнаружения конкретных бурильных операций может быть определена, например, по измерениям средней скорости, нагрузки на крюке,RPM и подачи бурильного насоса или давления в стояке. Как указывалось выше со ссылкой на фиг. 5, параметры, которые измеряются относительно времени, можно привести в приблизительное соответствие с глубиной в скважине и с хронологическим порядком, в котором различные компоненты бурильной колонны проходят через эту глубину в скважине. Измеренные параметры можно привести также в соответствие с направлением движения бурильной колонны в любой момент времени, а также с тем, работают ли буровые насосы, и вращается ли бурильная колонна. В одном аспекте сравнение выбранных параметров бурения может производиться относительно каждого момента времени, в который бурильная колонна проходит каждую глубину в скважине. Такие сравнения выбранных параметров относительно времени могут позволить определить глубину в скважи-6 007962 не, на которой могут встретиться осложнения в процессе бурения. Примеры сравнения максимальных, минимальных и последних значений выбранных параметров для идентификации возможных осложнений в процессе бурения приведены на фиг. 6. В одном примере значения крутящего момента, измеряемого, например, датчиком 14 В на фиг. 1, приложенного во время расширения ствола скважины, могут быть отложены по оси ординат графика на фиг. 6. Для каждой глубины могут быть отображены максимальное (точка 180) и минимальное (точка 184) значения крутящего момента и последнее по времени значение момента (точка 182). Как можно видеть на фиг. 6, на глубинеD1 момент возрастает со временем. Увеличение момента каждый раз, когда ВНА проходит глубину D1,может означать вероятность прихвата трубы впоследствии. На глубине D2 последний зарегистрированный момент значительно ниже записанного ранее максимального момента; это говорит о том, что на глубине D2 опасность прихвата снизилась. На фиг. 7 показан пример возможной проблемы с прихватом трубы в скважине. Например, минимальный момент (точка 188) показан при относительно большом значении на глубине D3. Последний зарегистрированный момент (точка 186) дает пик на меньшей глубине D4. В других вариантах способа в соответствии с этим аспектом изобретения, измеряемым параметром может быть нагрузка на крюке, измеренная, например, датчиком 14 А на фиг. 1. Другими параметрами,измеряемыми в целях данного аспекта изобретения, могут быть среди прочих и выходное давление бурового насоса, и гидростатическое давление бурового раствора в затрубном пространстве между ВНА и стенками скважины, и RPM. RPM, как упоминалось выше, может измеряться датчиком крутящего момента/RPM 14 В (фиг. 1). В некоторых вариантах разность между максимальным и минимальным значением RPM измеряется относительно глубины в скважине. В тех местах, где разность RPM превышает выбранное пороговое значение, может подаваться предупредительный или другой сигнал для указания,что на данной глубине могут возникнуть осложнения в процессе бурения, например осевший буровой шлам при расширении секции ствола скважины. В альтернативном варианте с помощью соответствующих датчиков в системе MWD 37 (фиг. 1) может измеряться максимальное угловое ускорение для определения участка по глубине скважины, который может стать причиной "прерывистого" вращения. Любые параметры, связанные с RPM и/или угловым ускорением, могут быть подвергнуты соответствующей обработке в этом варианте, чтобы определить участок по глубине скважины, подозрительный в отношении опасности возникновения прерывистого вращения. В некоторых вариантах, если измеряемый параметр изменяется на величину, указывающую на возможность появления осложнений при бурении, система может выдавать сигнал тревоги или другое указание оператору буровой установки на возможность появления осложнений при бурении. Примером основания для появления такого сигнала может служить обнаружение, что на определенной глубине в скважине крутящий момент при расширении ствола скважины приближается к максимально допустимому безопасному значению и увеличивается при каждом спуске-подъеме на определенной глубине в скважине. В других вариантах для определения условий, при которых должен появляться сигнал тревоги,может использоваться скорость изменения бурильного параметра. В одном примере момент увеличивается каждый раз, когда бурильная колонна вводится в скважину. Положительной особенностью системы,соответствующей этому аспекту изобретения, является то, что она освобождает оператора бурильной установки от необходимости следить за глубиной скважины, где возможны осложнения в процессе бурения, и изменением степени вероятности таких осложнений с течением времени. Особенное преимущество такой системы состоит в том, что она устраняет зависимость регистрации или другого учета таких осложненных условий бурения от конкретного оператора буровой установки. Это позволяет производить замену оператора буровой установки без опасения, что будет нарушено отслеживание возможных осложнений в процессе бурения. Пример определения рабочего режима бурения приведен на фиг. 8. Для выполнения процесса, изображенного на фиг. 8, измеряются определенные параметры, такие как положение долота, глубина скважины, нагрузка на крюке, рабочая скорость буровых насосов и скорость вращения верхнего привода. Процесс начинается на этапе 190. Например, на этапе 192 логическая процедура проверяет, больше ли нуля рабочая скорость буровых насосов. Если нет, а положение долота изменяется, это означает, что долото находится на меньшей глубине, чем полная глубина скважины, бурильная колонна не вращается(RPM=0), а, следовательно, рабочим режимом является подъем или спуск бурильной колонны (этап 194). В другом примере, если подача бурильного насоса ненулевая (этап 196), глубина погружения долота меньше полной глубины скважины, а бурильная колонна не вращается, процедура проверяет, больше ли нуля изменение глубины долота в функции времени. Если при этих дополнительных условиях положение долота не изменяется (этап 198), режим работы определяется как режим прокачивания бурового раствора по замкнутой системе. В другом примере глубина погружения долота увеличивается или не меняется, давление бурильного насоса больше нуля, а положение долота соответствует полной глубине скважины. При этих условиях на этапе 204 запрашивается скорость вращения верхнего привода. Если скорость вращения больше нуля (этап 208), имеет место роторное бурение. Если скорость вращения равна нулю (этап 206), имеет место безроторное бурение. Еще в одном примере измеренная нагрузка на крюке практически равна весу верхнего привода, давление бурового насоса, измеренное датчиком 28 (фиг. 1),-7 007962 равно нулю, RPM равна нулю, а глубина погружения долота меньше полной глубины скважины. В этих условиях режим определяется, как "захват в клиновых плашках"; этот режим применяется при наращивании бурильной колонны. Вс вышеизложенное является только несколькими примерами определения бурильного режима путем опроса значений выбранных параметров. Определение режима бурения, описанное выше со ссылками на фиг. 8, может использоваться в некоторых вариантах, чтобы определять, когда режимом бурения является "прорабатывание" ствола скважины перед добавлением нового сегмента бурильной трубы ("наращивание бурильной колонны"). В одном варианте завершение прорабатывания ствола определяется моментом, когда нагрузка на крюке уменьшается до веса крюка или верхнего привода, это указывает на то, что бурильная колонна отсоединена от верхнего привода или ведущей бурильной трубы, когда давление в стояке, измеренное, например, датчиком 28 на фиг. 1, падает до нуля, указывая на то, что буровые насосы отключены, и когдаRPM, измеренная, например, датчиком 14 В по фиг. 1, равна нулю. Начало прорабатывания ствола определяется самым последним моментом, когда буровое долото 40 (фиг. 1) поднимается со дна скважины, то есть глубина погружения бурового долота меньше полной глубины скважины, перед окончанием прорабатывания ствола. Согласно фиг. 9 начало прорабатывания ствола определяется на этапе 210. Во время прорабатывания ствола буровой насос 18 (фиг. 1) работает, а буровая колонна обычно вращается, одновременно поднимаясь и опускаясь. Измеряется давление насоса или стояка, а также давление в затрубном пространстве, если датчик 49 по фиг. 2 имеется в системе MWD, измеряется вращательное ускорение компонентов бурильной колонны, крутящий момент и нагрузка на крюке. Положение крюка измеряется также, например, с помощью датчика 11 А по фиг. 1. Измеряется полное время прорабатывания ствола скважины для каждого такого интервала прорабатывания. Цель измерения продолжительности каждого интервала прорабатывания будет разъяснена ниже со ссылкой на фиг. 10. В настоящем варианте разность между максимальным измеренным крутящим моментом и минимальным измеренным крутящим моментом, который измеряется на поверхности датчиком 14 В на фиг. 1 и/или в скважине в системе MWD 37 на фиг. 1, например, с помощью датчика 49, определяется в пределах заданного интервала времени и/или глубины на этапе 212. На этапе 214 определяется максимальный"перетяг" для каждого движения буровой колонны вверх во время прорабатывания ("расширения ствола скважины"). Перетяг определяется как нагрузка на крюке, превышающая ожидаемую нагрузку на крюке,необходимую для извлечения буровой колонны из скважины. Ожидаемая нагрузка на крюке может быть определена путем моделирования. Известной из уровня техники моделью является компьютерная программа, реализуемая под торговым наименованием WELLPLAN фирмой Landmark Graphics, Houston,TX. На этапе 216 определяется минимальное давление в стояке или минимальное затрубное давление для каждого движения бурильной колонны вверх во время прорабатывания ствола. Максимальное давление в затрубном пространстве или в стояке измеряется также во время каждого движения бурильной колонны вниз. На этапе 218 измеряется максимальный избыточный момент. Избыточный момент определяется как значение крутящего момента, приложенного к бурильной колонне, которое превышает ожидаемое значение крутящего момента. Ожидаемый крутящий момент, подобно ожидаемой нагрузке на крюке, может быть определен с помощью модели, такой как вышеупомянутая компьютерная программа WELLPLAN. На этапе 219 определяется максимальное вращательное ускорение компонента бурильной колонны и максимальная вариация давления в стояке и/или в затрубном пространстве в пределах заданного интервала времени и/или глубины. В настоящем варианте, на этапе 220, может быть выдан сигнал тревоги или какое-нибудь другое указание оператору буровой установки в случае появления одного или нескольких следующих условий. Во-первых, сигнал тревоги может быть выдан, если разность между максимальным и минимальным крутящим моментом превышает выбранное пороговое значение. Во-вторых, сигнал тревоги может быть выдан, если максимальный избыточный момент превышает выбранное пороговое значение. В третьих, сигнал тревоги может быть выдан, если минимальное давление в стояке или в затрубном пространстве упадет ниже уровня, необходимого для сдерживания гидростатического давления в земной породе, или для обеспечения механической устойчивости скважины во время движения бурильной колонны вверх в процессе прорабатывания. И наоборот, сигнал тревоги может быть выдан, если максимальное давление в стояке или в затрубном пространстве превысит значение, которое считается безопасным. Сигнал тревоги может быть также выдан, если максимальный перетяг превысит выбранное пороговое значение. Сигнал тревоги может быть выдан и в том случае, если максимальное вращательное ускорение компонента бурильной колонны и/или вариация давления в стояке и/или в затрубном пространстве в пределах заданного интервала времени и/или глубины превысит выбранное пороговое значение. Вообще говоря, настоящий вариант включает измерение по меньшей мере одного из параметров, относящихся к вращению бурильной колонны, параметра, относящегося к продольному движению бурильной колонны, и параметра,относящегося к давлению бурового раствора. Если один из измеряемых параметров превышает выбранное пороговое значение, может быть выдан аварийный или предупредительный сигнал. Предыдущие примеры иллюстрируют эту общую концепцию данного варианта реализации изобретения. На этапе 222 определяется разность между максимальным и минимальным значением измеренного крутящего момента при каждом очередном движении бурильной колонны вверх и вниз в процессе про-8 007962 рабатывания ствола. Аналогичным образом определяется максимальная величина перетяга при каждом очередном движении бурильной колонны вверх в процессе прорабатывания ствола. Максимальное вращательное ускорение компонента бурильной системы и/или максимальная вариация давления в стояке и/или максимальная вариация в затрубном пространстве в пределах заданного интервала времени и/или глубины определяются при каждом очередном движении бурильной колонны вверх в процессе прорабатывания ствола. Наконец, измеряется максимальный избыточный момент при каждом движении бурильной колонны в процессе прорабатывания ствола. На этапе 224, если разность между максимальным и минимальным моментом, или если максимальное ускорение компонента бурильной колонны, или максимальная вариация давления в стояке, или максимальная вариация в затрубном пространстве в пределах заданного интервала времени и/или глубины упадет ниже выбранного порогового значения во время какого-либо отдельного движения бурильной колонны вверх или вниз в процессе прорабатывания ствола,оператору бурильной установки или оператору скважины может быть выдано сообщение или сигнал, что процесс прорабатывания ствола можно безопасно заканчивать. В альтернативном варианте, на этапе 224,если максимальный перетяг упадет ниже выбранного порогового значения во время какого-либо движения бурильной колонны вверх в процессе прорабатывания ствола, может быть подан сигнал, что процесс прорабатывания ствола можно безопасно заканчивать. Наконец, если максимальный избыточный момент упадет ниже выбранного порогового значения, может быть подан сигнал, что процесс прорабатывания ствола можно безопасно заканчивать. В других вариантах комбинации любых или всех разностей максимальных/минимальных моментов,максимальных перетягов, максимальных избыточных моментов и максимальных вращательных ускорений компонентов бурильной колонны, или максимальных вариаций давления в стояке, или максимальных вариаций давления в затрубном пространстве скважины в пределах заданного интервала времени и/или глубины могут определяться при каждом движении бурильной колонны и сравниваться с соответствующими пороговыми значениями, чтобы определить, следует ли посылать сигнал или сообщение, что можно безопасно заканчивать процесс прорабатывания ствола. Преимущество вариантов реализации способа согласно этому аспекту изобретения состоит в том, что они предоставляют оператору бурильной установки или оператору скважины надежное сообщение о том, что прорабатывание ствола можно безопасно заканчивать. Способы, применяющиеся в уровне техники, основывающиеся, главным образом, на визуальном наблюдении за приборами на бурильной установке, не обеспечивают повторяемой надежной индикации, можно ли безопасно заканчивать прорабатывание ствола, что может привести к излишней продолжительности прорабатывания и соответствующим потерям бурильного времени) или к недостаточной продолжительности прорабатывания, что может вызвать прихват трубы или другие аварийные ситуации. В другом аспекте способ согласно изобретению включает определение интервала времени, называемого "временем в клиновых захватах". Как было указано выше со ссылкой на фиг. 9, момент завершения прорабатывания ствола определяется, когда бурильная колонна "берется в клиновые захваты", и,таким образом, начинается время в клиновых захватах. В целях определения изобретения начало периода в клиновых захватах определяется, как указывалось выше, когда измеряемая нагрузка на крюке снизится до веса крюка или верхнего привода, показывая, что буровая колонна отсоединена от верхнего привода или ведущей бурильной трубы, когда давление в стояке падает до нуля, показывая, что буровые насосы отключены, и когда RPM равна нулю. Конец периода в клиновых захватах определяется, как самое позднее время после начала периода в клиновых захватах, когда насосы отключены, RPM равна нулю, а нагрузка на крюке равна весу верхнего привода или крюка, перед тем как долото вернется на дно скважины, то есть глубина погружения долота станет после этого равной глубине скважины. Период в клиновых захватах в соответствии с этим аспектом изобретения измеряется для каждого "наращивания", то есть присоединения добавочного сегмента бурильной трубы для углубления скважины. Назначение измерения временного периода в клиновых захватах при каждом наращивании будет объяснено далее. Другой период времени - это интервал между окончанием периода "в клиновых захватах", когда верхний привод или ведущая бурильная труба снова присоединяются к бурильной колонне, и затем, когда буровое долото оказывается на дне скважины, то есть глубина погружения долота снова равна глубине скважины, и, по меньшей мере, часть веса бурильной колонны передается на буровое долото. Этот период времени может быть назван "временем возобновления бурения". Другой период времени, используемый в некоторых вариантах способа в соответствии с изобретением, именуется "периодом без прокачивания бурового раствора". Период без прокачивания бурового раствора является расширенным вариантом "периода в клиновых захватах" и охватывает все время между отключением буровых насосов перед окончанием прорабатывания ствола и возобновлением бурения. В течение этого времени буровые насосы отключены. Как показано на фиг. 10, в одном варианте измеряется максимальный перетяг в периоде возобновления бурения, когда к бурильной колонне добавляется каждый новый сегмент бурильной трубы, и вся бурильная труба высвобождается из клинового захвата для возобновления бурения, как показано на этапе 216. На этапе218 измеряется максимальный избыточный момент. На этапе 220 измеряется максимальное давление в стояке или давление в затрубном пространстве, если такой датчик имеется в системеMWD. На этапе 222 какой-нибудь один или более параметр из числа максимальных перетягов, максимальных избыточных моментов и максимальных давлений в стояке/затрубном пространстве сравнивается с соответствующим пороговым значением. Если один или более измеренных параметров превосходит соответствующее пороговое значение, оператору скважины или оператору бурильной установки может быть направлен предупредительный сигнал или другое извещение. В другом варианте со ссылкой на фиг. 11 на этапе 224 при каждом наращивании во время возобновления бурения измеряется максимальный перетяг, и для этого наращивания определяется период прорабатывания ствола, период в клиновом захвате и период без прокачивания бурового раствора. На этапе 226 для этого же наращивания измеряется максимальный избыточный момент во время возобновления бурения. На этапе 228 во время возобновления бурения измеряется максимальное давление в стояке или давление в затрубном пространстве, если в системе MWD имеется датчик давления в затрубном пространстве. На этапе 230 для каждого наращивания максимальный перетяг, максимальный избыточный момент и максимальное давление в стояке/затрубном пространстве сопоставляются с периодом в клиновых захватах, периодом без прокачивания бурильного раствора и периодом прорабатывания ствола, соответствующим каждому наращиванию. В результате этого сопоставления можно определить максимально безопасный период времени в клиновых захватах и безопасный период времени без прокачивания бурового раствора с учетом соотношения между периодом в клиновых захватах и периодом без прокачивания бурового раствора, и каким-либо одним или несколькими максимальными перетягами, максимальными избыточными моментами и максимальными давлениями. Соответственно, из сопоставления периода прорабатывания ствола с каким-либо одним или несколькими максимальными перетягами, максимальными избыточными моментами и максимальными давлениями можно определить минимальную безопасную продолжительность прорабатывания ствола. Максимальный период времени в клиновых захватах и/или максимальный период без прокачивания бурового раствора можно сравнивать с измеренным временем, прошедшим при аналогичных ситуациях во время последующих наращиваний. Если измеренное протекшее время при одном из последующих наращиваний приближается к одному из определенных максимальных безопасных периодов времени или к им обоим, или превосходит их, то может быть направлено сообщение или сигнал оператору буровой установки или оператору скважины, или выдан общий предупредительный сигнал. Соответственно,может быть послан предупредительный или другой сигнал, если будет установлено, что последующие периоды прорабатывания короче безопасного периода времени прорабатывания. Рассмотрим теперь другой аспект изобретения со ссылками на фиг. 12. Как известно из уровня техники, при движении буровой колонны в скважине вверх и вниз во время "спускоподъемных операций" или во время расширения ствола, например, в периодах прорабатывания ствола, описанных выше, важно избежать движения буровой колонны со скоростью, которая вызвала бы увеличение или уменьшение давления бурового раствора за пределы соответственных безопасных уровней. Давление бурильного раствора зависит от скорости и/или ускорения движения трубы вследствие эффекта, называемого "свабом",когда давление уменьшается из-за всасывания, происходящего при движении трубы из скважины наружу, и "импульсным давлением", когда давление увеличивается при движении бурильной колонный внутрь скважины. На этапе 232 по фиг. 12 вертикальное положение верхнего привода 14 (фиг. 1) или крюка измеряется с помощью описанного выше датчика 11 А высоты блока (фиг. 1). В некоторых вариантах положение верхнего привода или крюка может быть преобразовано в значение скорости верхнего привода или крюка для каждого момента времени. В других вариантах может применяться датчик скорости верхнего привода или крюка. Вне зависимости от конкретной используемой аппаратуры в процессе,соответствующем этому аспекту изобретения, определяются осевая скорость и ускорение верхнего привода или крюка в каждый момент времени при спускоподъемных операциях. В альтернативном варианте может измеряться осевая скорость блока датчиком 11 А на фиг. 1, наряду с определением таких параметров, как рабочие характеристики буровой лебедки 11 (фиг. 1), направление осевого движения верхнего привода 14 (фиг. 1). Для каждого соответствующего момента времени на этапе 234 датчиком давления 49(фиг. 2) в системе MWD 37 (фиг. 2) измеряется давление бурового раствора. Каждое из измеренных значений давления в затрубном пространстве, скорости верхнего привода и аксиального ускорения верхнего привода привязано также к глубине погружения долота в скважину в тот же самый момент времени. Затем определяется соотношение между скоростью верхнего привода и давлением в затрубном пространстве на выбранном интервале глубины. Аналогичные соотношения могут быть определены между максимальными аксиальными ускорениями верхнего привода и максимальным давлением в затрубном пространстве, измеренными в определенном интервале времени, следующем за максимальным ускорением,и максимальным аксиальным ускорением верхнего привода и минимальным давлением в затрубном пространстве, измеренными в определенном интервале времени, следующем за максимальным ускорением. В одном варианте выбранные интервалы глубины составляют около 1000 футов (300 м). Затем на этапе 236 для каждого интервала глубины вычисляются максимальная безопасная скорость верхнего привода и аксиальное ускорение, исходя из соотношений, полученных раздельно для подъема и для спуска бурильной колонны. Максимальная скорость верхнего привода при подъеме - это скорость, которая вызывает- 10007962 давление сваба не ниже безопасного минимума. Минимальное безопасное давление обычно выбирается равным гидростатическому давлению в соответствующих земных породах плюс коэффициент запаса. Соответственно, максимальная скорость при спуске - это скорость, которая вызывает импульсное давление ниже безопасного давления. Безопасное импульсное давление обычно выбирается равным давлению гидроразрыва соответствующих земных пород минус коэффициент запаса. Аналогичные пределы безопасных ускорений верхнего привода могут быть определены по гидростатическому давлению и давлению гидроразрыва тех же земных пород с соответствующими коэффициентами запаса. На практике результаты измерений, выполненных датчиком давления 49 (фиг. 2) в системе MWD 37 (фиг. 2), не могут быть переданы на поверхность земли с помощью модуляции гидроимпульсной системы телеметрии, известной из уровня техники, во время операций, при которых буровой насос 18 (фиг. 1) не работает. Поэтому может быть более практичным использовать во время таких операций электромагнитную систему телеметрии MWD, известную из уровня техники, или использовать канал сигнала,описанный в опубликованной патентной заявке США 2002/0075114 А 1, Hall и др., чтобы передать измеренные значения давления в регистрирующий блок 8 (фиг. 1). В некоторых вариантах предупредительный или другой сигнал, или сообщение могут быть переданы оператору буровой установки, если скорость или ускорение верхнего привода выходят за пределы безопасных значений при подъеме или при спуске. Способы, соответствующие различным аспектам изобретения, могут быть воплощены в компьютерном коде, записанном на машиночитаемом носителе, например на компакт-диске или магнитной дискете. При исполнении такого компьютерного кода программируемый компьютер общего назначения будет выполнять шаги, соответствующие различным аспектам изобретения, как описано выше. Ввиду того, что изобретение описано со ссылками на ограниченное число реализаций, для специалиста, ознакомившегося с этим описанием, будет очевидно, что могут быть и другие варианты реализации, не выходящие за рамки изобретения, которые определены только формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ идентификации потенциальных осложнений в процессе бурения скважины, в котором измеряют параметр бурения; сопоставляют параметр бурения с глубиной в скважине, которую проходят выбранные компоненты бурильной колонны; определяют изменения измеряемого параметра при каждом прохождении выбранными компонентами бурильной колонны выбранных глубин в скважине и генерируют предупредительный сигнал в ответ на определенные изменения измеряемого параметра. 2. Способ по п.1, отличающийся тем, что определяют режим бурения и сопоставляют измеряемый параметр с временными периодами, при которых режим бурения одинаков. 3. Способ по п.2, отличающийся тем, что режим бурения включает по меньшей мере один из следующих режимов: спуск, подъем, промывка ствола, откачка, расширение скважины при движении вниз и расширение скважины при движении вверх. 4. Способ по п.1, отличающийся тем, что измеряемый параметр включает по меньшей мере один из следующих параметров: параметр, связанный с нагрузкой на крюке, параметр, связанный с крутящим моментом, параметр, связанный со скоростью вращения бурильной колонны, параметр, связанный с давлением бурового раствора, и параметр, связанный со скоростью блока. 5. Способ по п.1, отличающийся тем, что генерируют предупредительный сигнал в случае превышения параметром выбранного порогового значения или в случае превышения изменением параметра выбранного порогового значения. 6. Способ определения потенциальных осложнений в процессе бурения скважины, в котором определяют временные периоды прорабатывания ствола скважины бурильной системой; измеряют по меньшей мере один из следующих параметров: параметр, связанный с вращением бурильной колонны, параметр, связанный с осевым движением бурильной колонны, и параметр, связанный с давлением бурового раствора во время прорабатывания; генерируют предупредительный сигнал в случае превышения по меньшей мере одним из указанных параметров выбранного порогового значения во время прорабатывания ствола скважины; определяют значения по меньшей мере одной из разностей между максимальным и минимальным измеренным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора при каждом расширении ствола скважины бурильной системой; и генерируют сигнал, по существу, о полном завершении прорабатывания ствола скважины в случае падения выбранными значениями разности между максимальным и минимальным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора ниже выбранного порогового значения. 7. Способ по п.6, отличающийся тем, что параметр, связанный с вращением бурильной колонны,включает крутящий момент. 8. Способ по п.6, отличающийся тем, что параметр, связанный с осевым движением, включает нагрузку на крюке. 9. Способ по п.6, отличающийся тем, что давление бурового раствора включает давление в затруб- 11007962 ном пространстве или давление в стояке. 10. Способ определения потенциальных осложнений в процессе бурения скважины, в котором определяют периоды статического состояния бурильной системы, когда буровые насосы не работают, а бурильная колонна неподвижна; в период, следующий за периодом статического состояния бурильной системы, когда бурильная система возобновляет движение бурильной колонны и работу бурового насоса,измеряют по меньшей мере один из следующих параметров: максимальный момент, максимальная нагрузка на крюке и максимальное давление бурового раствора; и генерируют предупредительный сигнал в случае превышения по меньшей мере одним из указанных параметров соответствующего выбранного порогового значения. 11. Способ по п.10, отличающийся тем, что по меньшей мере один из следующих параметров: ожидаемая нагрузка на крюке, ожидаемый момент и максимальное безопасное давление бурильного раствора определяют по математической модели бурильной системы и скважины. 12. Машиночитаемый носитель, на который записана программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: измерение параметра бурения; сопоставление измеренного параметра бурения с глубиной в скважине, которую проходят выбранные компоненты бурильной колонны; определение изменений измеряемого параметра при каждом прохождении выбранными компонентами бурильной колонны выбранных глубин в скважине; и генерирование предупредительного сигнала в ответ на определенные изменения измеряемого параметра. 13. Носитель по п.12, отличающийся тем, что программа содержит логику, при исполнении которой компьютер определяет режим бурения и сопоставляет измеряемый параметр с временными периодами,при которых режим бурения одинаков. 14. Носитель по п.13, отличающийся тем, что режим бурения включает по меньшей мере один из следующих режимов: спуск, подъем, промывка ствола, откачка, расширение скважины при движении вниз, расширение скважины при движении вверх. 15. Носитель по п.12, отличающийся тем, что измеряемый параметр включает по меньшей мере один из следующих параметров: параметр, связанный с нагрузкой на крюке, параметр, связанный с крутящим моментом, параметр, связанный со скоростью вращения компонента бурильной колонны, параметр, связанный с давлением в стояке, параметр, связанный с давлением бурового раствора, и параметр,связанный со скоростью блока. 16. Носитель по п.12, отличающийся тем, что при исполнении программы генерируется предупредительный сигнал в случае превышения параметром выбранного порогового значения или в случае превышения изменением параметра выбранного порогового значения. 17. Машиночитаемый носитель, на который записана программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: определение временных периодов прорабатывания ствола скважины бурильной системой; измерение по меньшей мере одного из следующих параметров: параметр, связанный с вращением бурильной колонны, параметр, связанный с осевым движением бурильной колонны, и параметр, связанный с давлением бурового раствора; генерирование предупредительного сигнала в случае превышения по меньшей мере одним из параметров выбранного порогового значения во время прорабатывания ствола скважины; определение значения по меньшей мере одной из разностей между максимальным и минимальным измеренным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора при каждом расширении ствола скважины бурильной системой; и генерирование сигнала, по существу, о полном завершении прорабатывания ствола скважины в случае падения выбранными значениями разности между максимальным и минимальным крутящим моментом, вариации максимального значения вращательного ускорения и вариации давления бурового раствора ниже выбранного порогового значения. 18. Носитель по п.17, отличающийся тем, что параметр, связанный с вращением бурильной колонны, включает крутящий момент. 19. Носитель по п.17, отличающийся тем, что параметр, связанный с аксиальным движением, включает нагрузку на крюке. 20. Носитель по п.17, отличающийся тем, что давление бурового раствора включает давление в затрубном пространстве или давление в стояке. 21. Машиночитаемый носитель, на который записана компьютерная программа, содержащая логику, при исполнении которой программируемый компьютер осуществляет следующие операции: определение периодов статического состояния бурильной системы, когда буровые насосы не работают, а бурильная колонна неподвижна; в период, следующий за периодом статического состояния бурильной системы, когда бурильная система возобновляет движение бурильной колонны и работу бурового насоса,измерение по меньшей мере одного из следующих параметров: максимальный момент, максимальная нагрузка на крюке и максимальное давление бурового раствора; и генерирование предупредительного сигнала в случае превышения по меньшей мере одним из указанных параметров соответствующего выбранного порогового значения. 22. Носитель по п.21, отличающийся тем, что по меньшей мере один из следующих параметров:- 12007962 ожидаемая нагрузка на крюке, ожидаемый момент или максимальное безопасное давление бурового раствора определяется по математической модели бурильной системы и скважины.
МПК / Метки
МПК: G06F 19/00, G01V 5/04, G01V 3/18, E21B 47/00
Метки: способ, данных, процесса, система, интерпретации, бурения
Код ссылки
<a href="https://eas.patents.su/17-7962-sistema-i-sposob-interpretacii-dannyh-processa-bureniya.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ интерпретации данных процесса бурения</a>
Способ интерпретации данных проектирования
Номер патента: 7379
Опубликовано: 27.10.2006
Авторы: Дайенес Вольфганг, Макколл Джеральд Дж.II
МПК: G06F 19/00
Метки: данных, интерпретации, способ, проектирования
Формула / Реферат:
1. Способ формирования технологического процесса изготовления по меньшей мере одной сборки, заключающийся в том, что проектируют по меньшей мере одну сборку, предназначенную для изготовления и содержащую по меньшей мере два элемента, связанные один с другим так, что область, где элементы должны быть связаны, определяет по меньшей мере одну контактную область, формируют отображение сборки, присваивают уникальный идентификатор каждому отдельному...
Объединенная система каротажа и бурения
Номер патента: 3807
Опубликовано: 30.10.2003
Автор: Руниа Дауве Йоханнес
МПК: E21B 17/02
Метки: каротажа, система, объединенная, бурения
Формула / Реферат:
1. Система для бурения и каротажа ствола скважины, образованного в земной формации, содержащая колонну бурильных труб, снабженную внешней выемкой, проходящей в продольном направлении колонны бурильных труб, канал для протекания бурового раствора от верхнего конца колонны бурильных труб к ее нижнему концу, проход, обеспечивающий жидкостную связь между каналом и выемкой, колонну каротажных приборов, способную проходить по указанному каналу и из...
Буровое долото и система для бурения ствола скважины
Номер патента: 7764
Опубликовано: 29.12.2006
Автор: Зейслинг Дюрре Ханс
МПК: E21B 10/32
Метки: система, буровое, ствола, долото, скважины, бурения
Формула / Реферат:
1. Буровое долото для бурения ствола скважины в некотором объекте с центральной продольной осью, характеризующееся тем, что оно содержит корпус с центральной стойкой для крепления бурового долота к буровой системе, по меньшей мере одну режущую лапу, каждая из которых снабжена набором режущих элементов для бурения упомянутого объекта и соединена с корпусом посредством шарнира, обеспечивающего возможность поворота режущей лапе от сложенного до...
Буровое долото и система, предназначенная для бурения ствола скважины
Номер патента: 7832
Опубликовано: 27.02.2007
Авторы: Зейслинг Дюрре Ханс, Савинья Жан -Мишель Клод Гастон
МПК: E21B 10/26, E21B 7/06, E21B 7/04...
Метки: бурения, предназначенная, ствола, долото, скважины, система, буровое
Формула / Реферат:
1. Устройство, представляющее собой буровое долото, предназначенное для бурения ствола скважины в некотором объекте, буровое долото имеет центральную продольную ось и содержит направляющую секцию, предназначенную для бурения в некотором объекте направляющей части ствола скважины; секцию с уширенной пятой, следующую за направляющей секцией, режущий диаметр Du секции с уширенной пятой превосходит режущий диаметр Dp направляющей секции;...
Способ и система для предотвращения или смягчения нежелательных событий бурения
Номер патента: 7847
Опубликовано: 27.02.2007
Авторы: Алдред Уолтер, Михан Ричард, Данлоп Джонатан, Хотеит Лейла
МПК: E21B 44/00
Метки: событий, система, смягчения, бурения, способ, нежелательных, предотвращения
Формула / Реферат:
1. Способ автоматического предотвращения или смягчения нежелательных событий бурения во время процесса бурения, содержащий следующие операции: определение состояния буровой установки, включающего роторное бурение; скользящее бурение; введение в скважину, прокачивание и вращение; введение в скважину и прокачивание; введение в скважину; выведение из скважины, прокачивание и вращение; выведение из скважины и прокачивание; подъем; статическое...
Предыдущий патент: Мобильный терминал передачи данных с функцией считывания информации с ярлыка передачи данных бесконтактного типа и способ предоставления информации о подлинности товара
Следующий патент: Способ снижения концентрации альдегидов в смеси, содержащей циклогексанон и один или несколько альдегидов
Случайный патент: Дорожное защитное ограждение