Ультразвуковой зонд с позиционирующим приспособлением для позиционирования диагностических и хирургических устройств
Номер патента: 5391
Опубликовано: 24.02.2005
Авторы: Маркштайнер Райнер, Херинг Штеффен, Штрассер Ханнес
Формула / Реферат
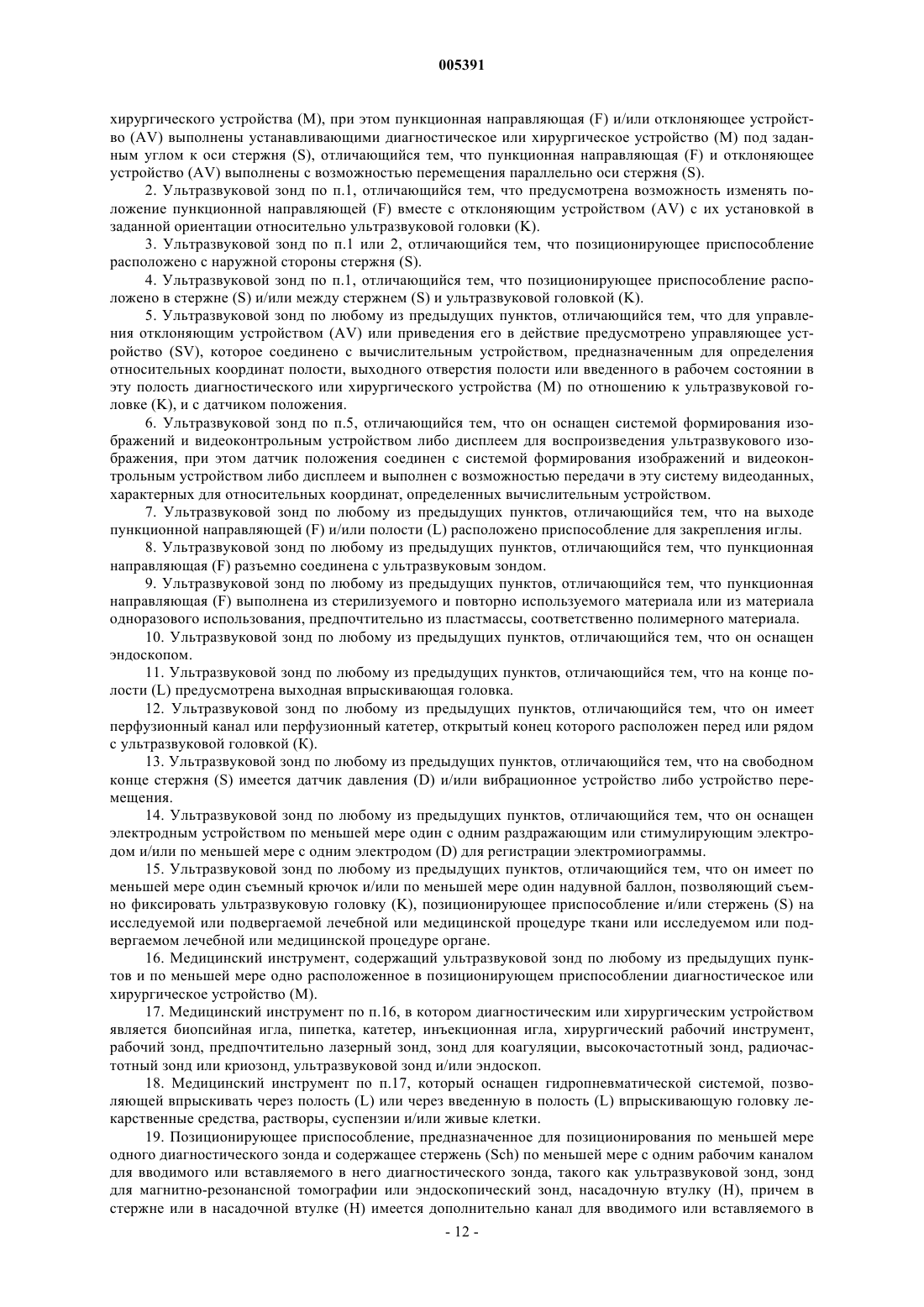
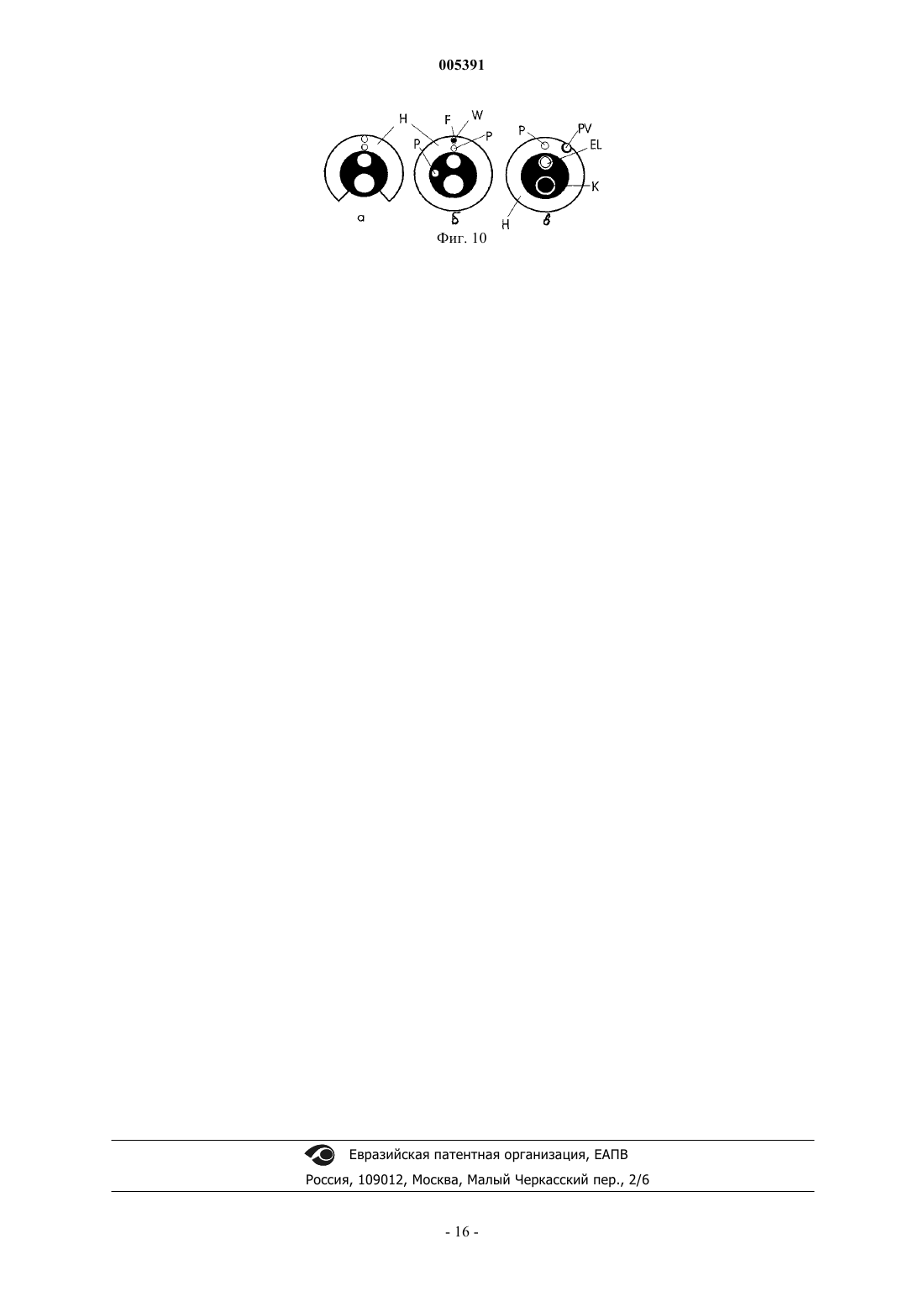
1. Ультразвуковой зонд, содержащий ультразвуковую головку (K), закрепленную на стержне (S) и перемещаемую вместе с ним либо расположенную в стержне (S) и перемещаемую в нем, и позиционирующее приспособление, предназначенное для позиционирования по меньшей мере одного диагностического или хирургического устройства, при этом такое позиционирующее приспособление соединено со стержнем (S) и имеет по меньшей мере одну пункционную направляющую (F) по меньшей мере с одной трубчатой или щелевидной полостью (L) для вставляемого или вводимого в нее диагностического или хирургического устройства (M) и отклоняющее устройство (AV) для отклонения диагностического или хирургического устройства (M), при этом пункционная направляющая (F) и/или отклоняющее устройство (AV) выполнены устанавливающими диагностическое или хирургическое устройство (M) под заданным углом к оси стержня (S), отличающийся тем, что пункционная направляющая (F) и отклоняющее устройство (AV) выполнены с возможностью перемещения параллельно оси стержня (S).
2. Ультразвуковой зонд по п.1, отличающийся тем, что предусмотрена возможность изменять положение пункционной направляющей (F) вместе с отклоняющим устройством (AV) с их установкой в заданной ориентации относительно ультразвуковой головки (K).
3. Ультразвуковой зонд по п.1 или 2, отличающийся тем, что позиционирующее приспособление расположено с наружной стороны стержня (S).
4. Ультразвуковой зонд по п.1, отличающийся тем, что позиционирующее приспособление расположено в стержне (S) и/или между стержнем (S) и ультразвуковой головкой (K).
5. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что для управления отклоняющим устройством (AV) или приведения его в действие предусмотрено управляющее устройство (SV), которое соединено с вычислительным устройством, предназначенным для определения относительных координат полости, выходного отверстия полости или введенного в рабочем состоянии в эту полость диагностического или хирургического устройства (M) по отношению к ультразвуковой головке (K), и с датчиком положения.
6. Ультразвуковой зонд по п.5, отличающийся тем, что он оснащен системой формирования изображений и видеоконтрольным устройством либо дисплеем для воспроизведения ультразвукового изображения, при этом датчик положения соединен с системой формирования изображений и видеоконтрольным устройством либо дисплеем и выполнен с возможностью передачи в эту систему видеоданных, характерных для относительных координат, определенных вычислительным устройством.
7. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что на выходе пункционной направляющей (F) и/или полости (L) расположено приспособление для закрепления иглы.
8. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что пункционная направляющая (F) разъемно соединена с ультразвуковым зондом.
9. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что пункционная направляющая (F) выполнена из стерилизуемого и повторно используемого материала или из материала одноразового использования, предпочтительно из пластмассы, соответственно полимерного материала.
10. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он оснащен эндоскопом.
11. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что на конце полости (L) предусмотрена выходная впрыскивающая головка.
12. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он имеет перфузионный канал или перфузионный катетер, открытый конец которого расположен перед или рядом с ультразвуковой головкой (K).
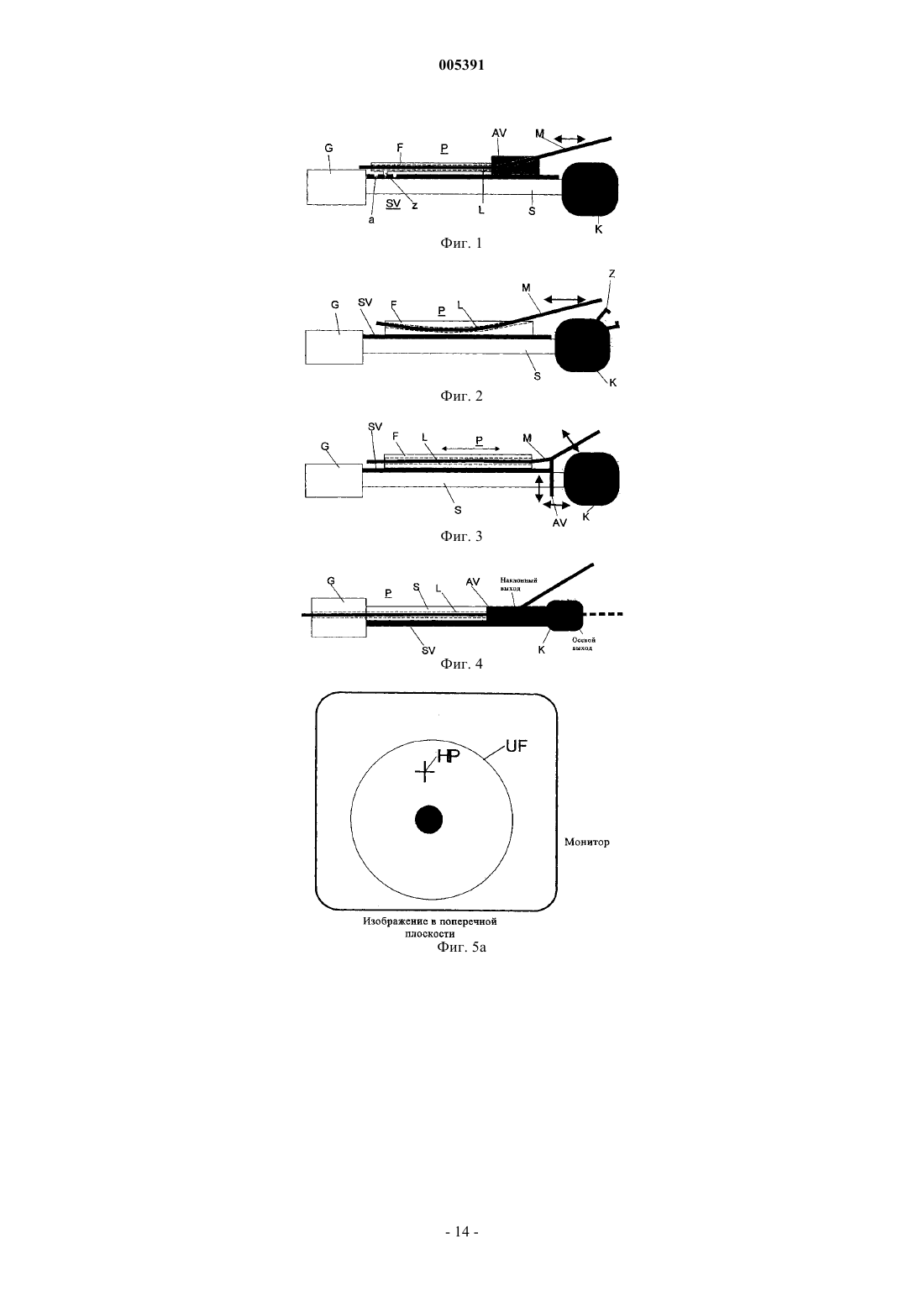
13. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что на свободном конце стержня (S) имеется датчик давления (D) и/или вибрационное устройство либо устройство перемещения.
14. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он оснащен электродным устройством по меньшей мере один с одним раздражающим или стимулирующим электродом и/или по меньшей мере с одним электродом (D) для регистрации электромиограммы.
15. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он имеет по меньшей мере один съемный крючок и/или по меньшей мере один надувной баллон, позволяющий съемно фиксировать ультразвуковую головку (K), позиционирующее приспособление и/или стержень (S) на исследуемой или подвергаемой лечебной или медицинской процедуре ткани или исследуемом или подвергаемом лечебной или медицинской процедуре органе.
16. Медицинский инструмент, содержащий ультразвуковой зонд по любому из предыдущих пунктов и по меньшей мере одно расположенное в позиционирующем приспособлении диагностическое или хирургическое устройство (M).
17. Медицинский инструмент по п.16, в котором диагностическим или хирургическим устройством является биопсийная игла, пипетка, катетер, инъекционная игла, хирургический рабочий инструмент, рабочий зонд, предпочтительно лазерный зонд, зонд для коагуляции, высокочастотный зонд, радиочастотный зонд или криозонд, ультразвуковой зонд и/или эндоскоп.
18. Медицинский инструмент по п.17, который оснащен гидропневматической системой, позволяющей впрыскивать через полость (L) или через введенную в полость (L) впрыскивающую головку лекарственные средства, растворы, суспензии и/или живые клетки.
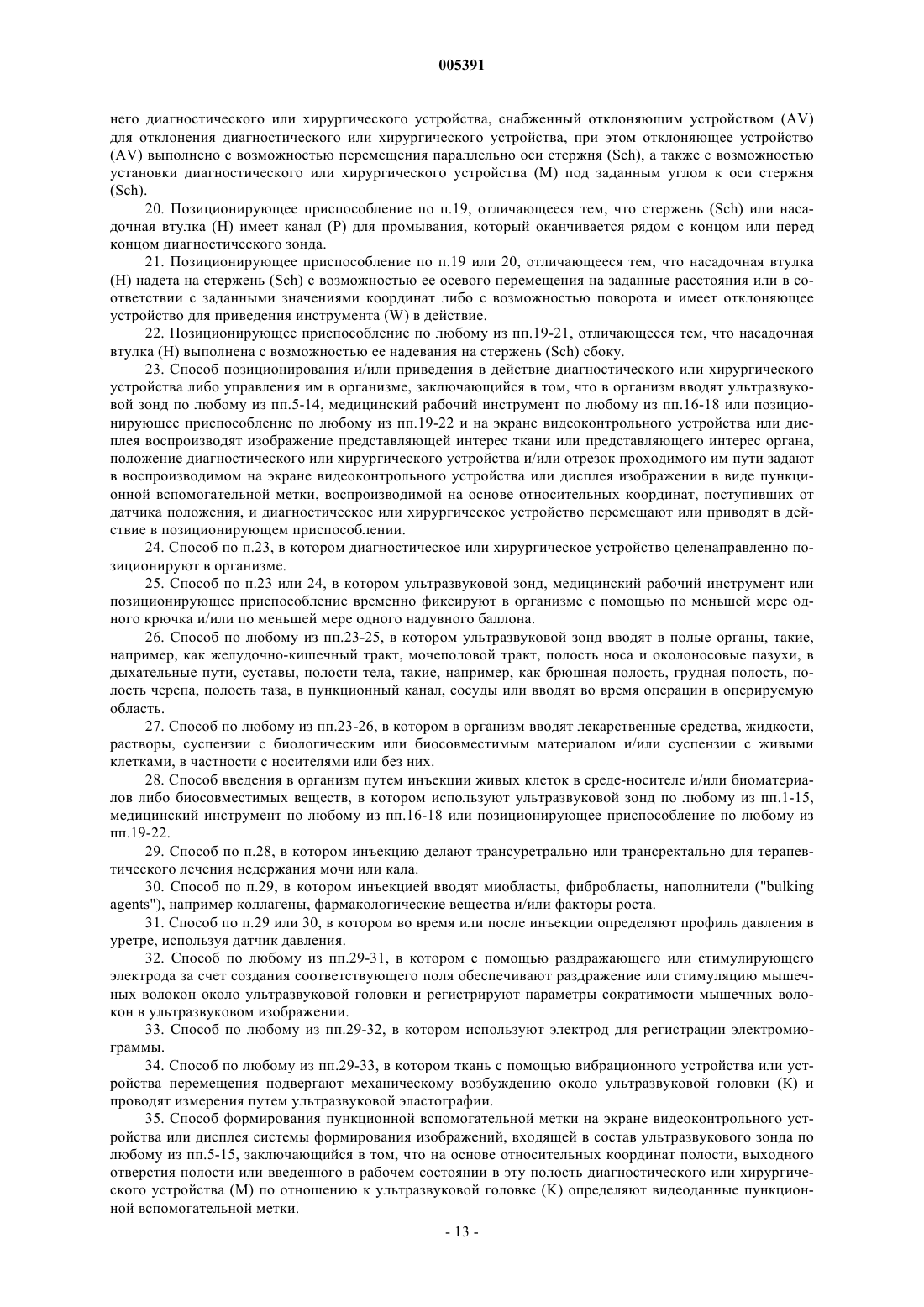
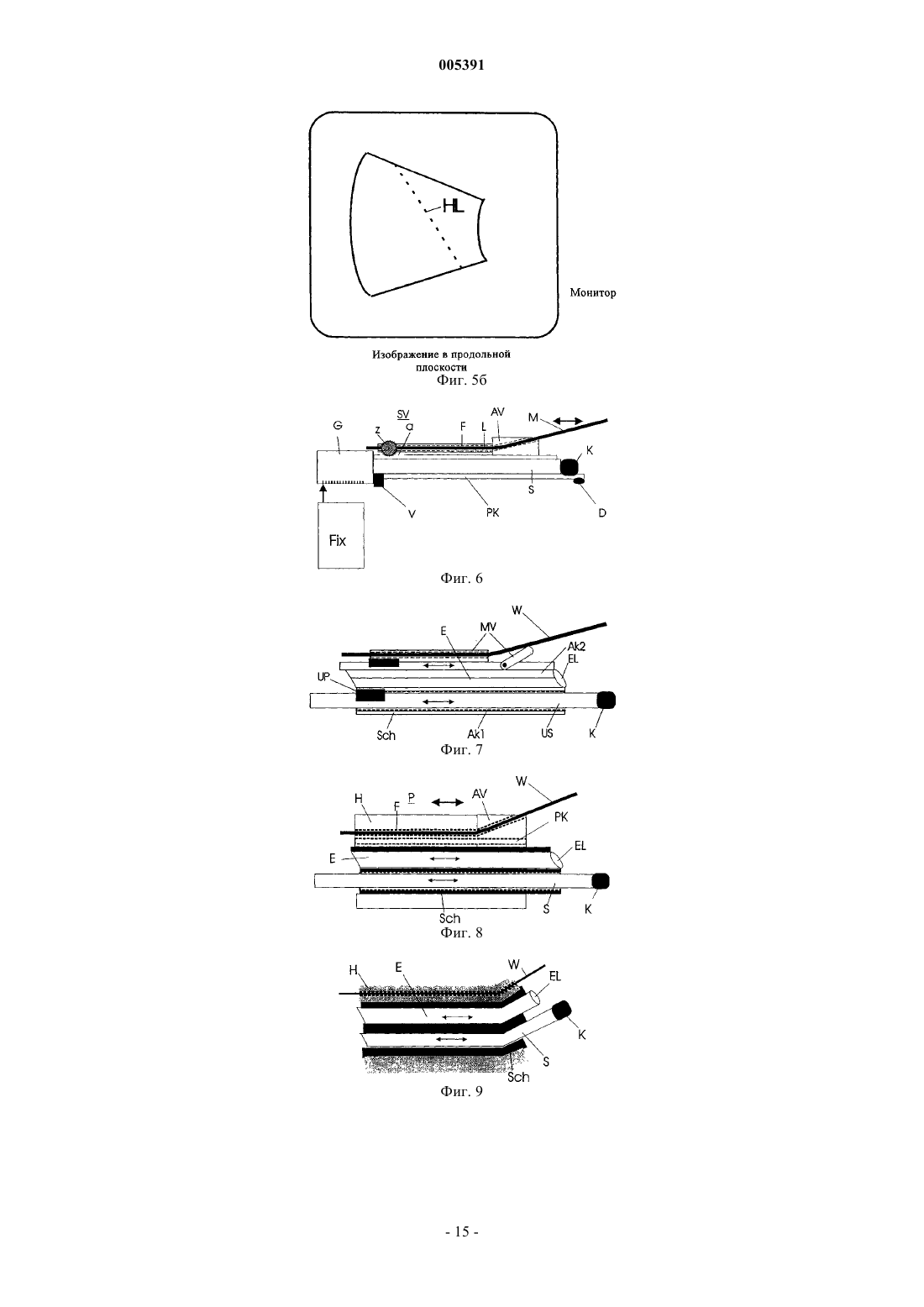
19. Позиционирующее приспособление, предназначенное для позиционирования по меньшей мере одного диагностического зонда и содержащее стержень (Sch) по меньшей мере с одним рабочим каналом для вводимого или вставляемого в него диагностического зонда, такого как ультразвуковой зонд, зонд для магнитно-резонансной томографии или эндоскопический зонд, насадочную втулку (H), причем в стержне или в насадочной втулке (H) имеется дополнительно канал для вводимого или вставляемого в него диагностического или хирургического устройства, снабженный отклоняющим устройством (AV) для отклонения диагностического или хирургического устройства, при этом отклоняющее устройство (AV) выполнено с возможностью перемещения параллельно оси стержня (Sch), а также с возможностью установки диагностического или хирургического устройства (M) под заданным углом к оси стержня (Sch).
20. Позиционирующее приспособление по п.19, отличающееся тем, что стержень (Sch) или насадочная втулка (H) имеет канал (P) для промывания, который оканчивается рядом с концом или перед концом диагностического зонда.
21. Позиционирующее приспособление по п.19 или 20, отличающееся тем, что насадочная втулка (H) надета на стержень (Sch) с возможностью ее осевого перемещения на заданные расстояния или в соответствии с заданными значениями координат либо с возможностью поворота и имеет отклоняющее устройство для приведения инструмента (W) в действие.
22. Позиционирующее приспособление по любому из пп.19-21, отличающееся тем, что насадочная втулка (H) выполнена с возможностью ее надевания на стержень (Sch) сбоку.
23. Способ позиционирования и/или приведения в действие диагностического или хирургического устройства либо управления им в организме, заключающийся в том, что в организм вводят ультразвуковой зонд по любому из пп.5-14, медицинский рабочий инструмент по любому из пп.16-18 или позиционирующее приспособление по любому из пп.19-22 и на экране видеоконтрольного устройства или дисплея воспроизводят изображение представляющей интерес ткани или представляющего интерес органа, положение диагностического или хирургического устройства и/или отрезок проходимого им пути задают в воспроизводимом на экране видеоконтрольного устройства или дисплея изображении в виде пункционной вспомогательной метки, воспроизводимой на основе относительных координат, поступивших от датчика положения, и диагностическое или хирургическое устройство перемещают или приводят в действие в позиционирующем приспособлении.
24. Способ по п.23, в котором диагностическое или хирургическое устройство целенаправленно позиционируют в организме.
25. Способ по п.23 или 24, в котором ультразвуковой зонд, медицинский рабочий инструмент или позиционирующее приспособление времеээю фиксируют в организме с помощью по меньшей мере одного крючка и/или по меньшей мере одного надувного баллона.
26. Способ по любому из пп.23-25, в котором ультразвуковой зонд вводят в полые органы, такие, например, как желудочно-кишечный тракт, мочеполовой тракт, полость носа и околоносовые пазухи, в дыхательные пути, суставы, полости тела, такие, например, как брюшная полость, грудная полость, полость черепа, полость таза, в пункционный канал, сосуды или вводят во время операции в оперируемую область.
27. Способ по любому из пп.23-26, в котором в организм вводят лекарственные средства, жидкости, растворы, суспензии с биологическим или биосовместимым материалом и/или суспензии с живыми клетками, в частности с носителями или без них.
28. Способ введения в организм путем инъекции живых клеток в среде-носителе и/или биоматериалов либо биосовместимых веществ, в котором используют ультразвуковой зонд по любому из пп.1-15, медицинский инструмент по любому из пп.16-18 или позиционирующее приспособление по любому из пп.19-22.
29. Способ по п.28, в котором инъекцию делают трансуретрально или трансректально для терапевтического лечения недержания мочи или кала.
30. Способ по п.29, в котором инъекцией вводят миобласты, фибробласты, наполнители ("bulking agents"), например коллагены, фармакологические вещества и/или факторы роста.
31. Способ по п.29 или 30, в котором во время или после инъекции определяют профиль давления в уретре, используя датчик давления.
32. Способ по любому из пп.29-31, в котором с помощью раздражающего или стимулирующего электрода за счет создания соответствующего поля обеспечивают раздражение или стимуляцию мышечных волокон около ультразвуковой головки и регистрируют параметры сократимости мышечных волокон в ультразвуковом изображении.
33. Способ по любому из пп.29-32, в котором используют электрод для регистрации электромиограммы.
34. Способ по любому из пп.29-33, в котором ткань с помощью вибрационного устройства или устройства перемещения подвергают механическому возбуждению около ультразвуковой головки (K) и проводят измерения путем ультразвуковой эластографии.
35. Способ формирования пункционной вспомогательной метки на экране видеоконтрольного устройства или дисплея системы формирования изображений, входящей в состав ультразвукового зонда по любому из пп.5-15, заключающийся в том, что на основе относительных координат полости, выходного отверстия полости или введенного в рабочем состоянии в эту полость диагностического или хирургического устройства (M) по отношению к ультразвуковой головке (K) определяют видеоданные пункционной вспомогательной метки.

Текст
005391 Настоящее изобретение относится к позиционирующему приспособлению, предназначенному для введения в исследуемый или обследуемый организм и позиционирования в нем диагностического зонда и еще одного диагностического или используемого в хирургических или процедурных целях устройства,и прежде всего к эндолюминальному ультразвуковому зонду, оснащенному позиционирующим приспособлением, которое предназначено, главным образом, для направленного перемещения и позиционирования еще одного диагностического или хирургического устройства в теле пациента. Изобретение относится также к способу ориентации и/или приведения в действие диагностических или хирургических устройств или управления ими в организме и к применению в различных целях диагностических зондов,прежде всего эндолюминального ультразвукового зонда, с позиционирующим приспособлением. Современная ультразвуковая аппаратура занимает важное место в основанной на получении изображений исследуемых органов и тканей диагностике и обеспечивает быстрое, безболезненное и безопасное исследование органов и анатомических, а также патологических структур. Помимо этого были разработаны методы ультразвуковой эхографии, с помощью которых стало возможным целенаправленно на основе ультразвуковых изображений забирать из органов или полостей тела биоптаты или брать из органов или полостей тела пробы соответствующего материала путем аспирации. Первые пункционные вспомогательные приспособления для ультразвуковых зондов были описаны в литературе уже в начале 1980-х годов (см., например, патенты US 4363326, US 4402324, US 4489730, US 4542747 и US 4635644). Такие приспособления представляют собой простые пункционные направляющие для ультразвуковых зондов, с помощью которых из организма пациента можно было целенаправленно по ультразвуковым изображениям, последовательно формируемым начиная с поверхности тела и далее по мере продвижения зонда вглубь тела, забирать биоптаты. Помимо этого известны пункционные направляющие, которые либо стационарно интегрированы в ультразвуковой зонд (см. US 4363326 и US 4635644), либо выполнены съемными (см. US 4402324). Подобные съемные пункционные вспомогательные приспособления имеют самую различную форму. Так, в частности, была разработана клиновидная пункционная направляющая, размеры и форма которой точно согласованы с размерами и формой клиновидной боковой выемки в ультразвуковом зонде, в которую она вставляется (см. US 4489730). После пункции используемую для нее пункционную иглу вместе с пункционной направляющей можно отсоединить от ультразвукового зонда, что позволяет оставлять иглу в теле пациента и одновременно извлекать из него ультразвуковой зонд. В патенте US 4542747 описан ультразвуковой зонд, состоящий из двух половин, каждая из которых имеет по направляющему пазу. После сборки друг с другом обеих половин оба их паза в паре образуют единый пункционный канал. После пункции обе половины ультразвукового зонда можно вновь разъединить и извлечь из тела пациента, что также позволяет оставлять иглу в теле пациента. Из патента US 5052396 известна съемная пункционная направляющая, имеющая несколько направляющих пазов под иглы различных диаметров. Из уровня техники известны далее пункционные вспомогательные приспособления для эндолюминальных ультразвуковых зондов. Так, например, известен трансвагинальный ультразвуковой зонд с надеваемой на него сбоку пункционной направляющей, что позволяет на основе ультразвуковых изображений целенаправленно извлекать яйцеклетки из яичников или забирать биоптаты из женских органов,расположенных в области таза (см. US 4742829). С целью повысить различимость пункционной иглы в ультразвуковом изображении наряду с обычными методами ультразвуковой эхографии была разработана также вибрационная система, приводящая пункционную иглу в слабые колебания, что благодаря доплеровскому эффекту позволяет улучшить различимость иглы в ультразвуковом изображении (см. US 5343865). Помимо этого известны также гибкие эндолюминальные ультразвуковые зонды с рабочим каналом, на рабочие характеристики которого изгиб ультразвукового зонда не оказывает никакого отрицательного влияния (см. US 5469853). С помощью такой системы можно забирать биоптаты при эндохирургических операциях. В медицине используются также хирургические инструменты, с помощью которых подвергаемую лечебной процедуре ткань можно еще перед выполнением разреза или перед коагуляцией предварительно исследовать с применением ультразвуковой головки ультразвуковой аппаратуры. У разработанных в последние годы пункционных вспомогательных приспособлений была упрощена и улучшена их форма. Так, например, из уровня техники известны выполненные в виде оболочки направляющие, которые лишь незначительно увеличивают диаметр ультразвукового зонда (см. US 5924992). Помимо этого известны системы крепления пункционных направляющих, позволяющие при их применении с эндолюминальными ультразвуковыми зондами отсоединять введенную в тело пациента иглу от ультразвукового зонда, что позволяет извлекать ультразвуковой зонд из тела пациента и оставлять в нем пункционную иглу (см. US 6095981). Традиционные ультразвуковые зонды с пункционными вспомогательными приспособлениями обладают целым рядом недостатков. Так, в частности, функциональные возможности известных конструкций ограничены тем, что расстояние между введенным в пункционное вспомогательное приспособление диагностическим или хирургическим устройством (например, иглой) и ультразвуковой головкой является постоянной величиной и его нельзя ни изменять, ни точно контролировать в ультразвуковом изображении. Ни одной из описанных в литературе пункционных систем для ультразвуковых зондов невозможно управлять таким образом, чтобы при заданном положении эндолюминального ультразвукового-1 005391 зонда в теле пациента можно было изменять расстояние между введенными во вспомогательное приспособление рабочими инструментами и ультразвуковой головкой. Поэтому с использованием существующих в настоящее время ультразвуковых зондов и соединенных с ними пункционных систем не представляется возможным целенаправленно позиционировать с помощью эндолюминального ультразвукового зонда катетеры, пункционные иглы или иные диагностические или хирургические устройства в окружающей ткани сосудов или узких полых органах на изменяемом расстоянии от ультразвуковой головки,поскольку в этом случае попытка изменить положение ультразвукового зонда привела бы к повреждению (например, надрыву, отрыву, сдавливанию, защемлению, перфорации) полого органа или сосуда, в котором находится зонд, или поскольку подобному изменению положения зонда существенно препятствуют окружающие его структуры. В этих случаях эндолюминальный ультразвуковой зонд можно лишь перемещать вдоль продольной оси или поворачивать вокруг нее. Известные из уровня техники ультразвуковые зонды с пункционными вспомогательными приспособлениями из-за отсутствия возможности изменять угол выхода диагностического или хирургического устройства из пункционного приспособления не позволяют точно пунктировать структуру, которая находится сбоку в области стенки узкого просвета (например, мочеиспускательного канала или кровеносного сосуда). Помимо этого до настоящего времени отсутствовала возможность целенаправленно перемещать пункционные направляющие вдоль стержня эндолюминальных ультразвуковых зондов. Такие же недостатки присущи и обычным эндолюминальным зондам для магнитно-резонансной томографии. Общеизвестно далее, что в настоящее время для осмотра мочеиспускательного канала и инъекции наполнителей ("bulking agents") преимущественно используются эндоскопы. Во избежание повреждения тканей при введении эндоскопа (главным образом, выстилающих слизистых оболочек и расположенных под ними слоев) у подобных эндоскопов обычно предусматривают перфузионный канал, выходящий с передней стороны эндоскопа. Непрерывное промывание мочеиспускательного канала подаваемой через этот перфузионный канал жидкостью обеспечивает расширение мочеиспускательного канала непосредственно перед линзой эндоскопа. Благодаря этому эндоскоп можно вводить в мочеиспускательный канал без опасности перфорации его стенки. Расширение мочеиспускательного канала перед эндоскопом позволяет видеть его конфигурацию и просвет по мере введения в него эндоскопа. Одновременно с этим введение жидкости в мочеиспускательный канал позволяет в процессе терапевтического лечения определять его эффект. На использование транслюминальных ультразвуковых зондов традиционных конструкций для введения наполнителей в уретру накладываются определенные ограничения, поскольку при введении зонда в мочеиспускательный канал не обладающим достаточным опытом персоналом не исключена возможность повреждения мочеиспускательного канала. Поэтому при использовании трансуретральных зондов,излучающих ультразвуковые колебания лишь в одной плоскости (т.е. зондов, позволяющих получать изображения мочеиспускательного канала только в поперечной плоскости), с целью обеспечить безопасное введение зонда в уретру часто требуется дополнительно применять эндоскоп. Использование в транслюминальном ультразвуковом зонде ультразвуковой головки, излучающей ультразвуковые колебания во второй плоскости, позволяет с помощью одного-единственного эндолюминального ультразвукового зонда получать изображения мочеиспускательного канала не только в поперечной, но и в продольной плоскости (т.е. по его длине). Однако недостаток подобных зондов состоит в том, что они при их введении в просвет мочеиспускательного канала непосредственно прилегают к его внутренней стенке, закрывая хирургу продольный обзор в просвете мочеиспускательного канала. Поскольку мочеиспускательный канал не заполнен жидкостью, введение в него зонда может привести к его тяжелым повреждениям (главным образом, у мужчины). В некоторых известных трансректальных ультразвуковых зондах используются баллонные конструкции, располагаемые вблизи ультразвуковой головки и обеспечивающие за счет их наполнения текучей средой расширение прямой кишки, улучшая тем самым обзор в ее просвете. Однако имеющие подобное исполнение транслюминальные зонды не пригодны для исследования особо узкого мочеиспускательного канала, поскольку они не имеют перфузионного канала для расширения просвета, обеспечиваемого за счет промывания мочеиспускательного канала соответствующей жидкостью. Еще один недостаток традиционных ультразвуковых зондов с манипуляторами обусловлен их сложной конструкцией. Обычные манипуляторы оборудованы микромеханическими устройствами и поэтому являются дорогими и сложными в изготовлении. Одноразовое использование микромеханических манипуляторов экономически нецелесообразно. Известны далее гибкие ультразвуковые зонды и эндоскопы, оснащенные отклоняющими устройствами. Обычное отклоняющее устройство образовано, например, тяговым тросиком, который пропущен через предусмотренный у зонда для этой цели канал и с помощью которого ультразвуковую головку можно отклонять на ту или иную величину. В основу настоящего изобретения была положена задача усовершенствовать ультразвуковой зонд с позиционирующим приспособлением, который был бы лишен недостатков, присущих традиционным конструкциям, и который обладал бы, прежде всего, более широкими функциональными возможностями. Изобретение должно обеспечить, прежде всего, возможность точного контроля за позиционировани-2 005391 ем диагностических или хирургических устройств в теле пациента. Еще одна задача изобретения состояла в разработке позиционирующего приспособления, которое было бы пригодно для введения в тело пациента диагностических зондов и их позиционирования в теле пациента. Задача изобретения состояла также в разработке новых способов позиционирования диагностических или хирургических устройств, а также их применения. Указанные задачи решаются с помощью устройств и способов, отличительные признаки которых представлены соответственно в пп.1, 13, 16, 19, 23 и 28 формулы изобретения. Предпочтительные варианты осуществления изобретения приведены в соответствующих зависимых пунктах формулы. Основная идея изобретения состоит в том, что у ультразвукового зонда с ультразвуковой головкой,закрепленной на гибком или жестком стержне и перемещаемой вместе с ним, предусмотрено позиционирующее приспособление, предназначенное для позиционирования по меньшей мере одного диагностического или хирургического устройства, при этом такое позиционирующее приспособление имеет по меньшей мере одну пункционную направляющую, образующую направляющую с определенным креплением или упором для диагностического или хирургического устройства, а диагностическое или хирургическое устройство выполнено регулируемым по положению (переставляемым) с помощью отклоняющего устройства таким образом, чтобы упор (или полость пункционной направляющей, выходное отверстие этой полости или введенное в нее в рабочем состоянии диагностическое или хирургическое устройство) занимал относительно ультразвуковой головки заданное положение, которое при необходимости может изменяться с течением времени. Ультразвуковым зондом предпочтительно является эндолюминальный ультразвуковой зонд. Диагностическим или хирургическим устройством (называемым далее также манипуляционным устройством) может служить, например, биопсийное приспособление, инъекционная пипетка или хирургический инструмент. Преимущество предлагаемого в изобретении ультразвукового зонда состоит в том, что позиционирующее приспособление, предназначенное для позиционирования манипуляционного устройства, образует определенную систему крепления и одновременно допускает возможность его гибкого регулирования (перемещения, изменения углового положения) с установкой в определенные положения. За счет оснащения ультразвукового зонда гибким пункционным вспомогательным приспособлением впервые стало возможным целенаправленно изменять расстояние между ультразвуковой головкой и введенным в пункционное вспомогательное приспособление манипуляционным устройством, выступающим из направляющего устройства, например, сбоку от ультразвукового зонда. Подобная возможность обеспечивает достижение существенных преимуществ, прежде всего при введении зонда в полые органы, сосуды, суставы, иные полости тела или узкие оперируемые области, в которых ультразвуковой зонд можно практически только поворачивать, продвигать вперед или отводить назад. За счет применения эндолюминального ультразвукового зонда с гибким пункционным вспомогательным приспособлением впервые становится возможным целенаправленно изменять положение хирургического или диагностического устройства (например, катетера) непосредственно в процессе диагностического обследования или хирургической операции. Согласно одному из предпочтительных вариантов осуществления изобретения отклоняющее устройство по меньшей мере для одного манипуляционного устройства выполнено с возможностью его регулирования по положению с помощью управляющего устройства. Управление отклоняющим устройством осуществляется таким образом, чтобы упор пункционной направляющей или введенное в нее манипуляционное устройство занимало определенное положение относительно ультразвуковой головки или перемещалось на определенное расстояние относительно ультразвуковой головки. Указанное положение описывается определенными пространственными координатами по отношению к ультразвуковой головке. Управляющее устройство предпочтительно соединено с системой формирования изображений, входящей в состав ультразвукового зонда, через датчик положения. Такая система формирования изображений имеет, в частности, видеоконтрольное устройство или дисплей, на экране которого воспроизводятся ультразвуковые изображения. Согласно изобретению с помощью датчика положения, входящего в состав управляющего устройства, в систему формирования изображений передаются сигналы, соответствующие относительным координатам положения, в которое установилась пункционная направляющая, и используемые для воспроизведения на экране видеоконтрольного устройства или дисплея некоторой метки, например пункционной вспомогательной линии или пункционной вспомогательной точки. В соответствии с этим объектом настоящего изобретения являются также ультразвуковой зонд с системой формирования изображений, которая соединена с управляющим устройством пункционной направляющей и предназначена для отображения на экране видеоконтрольного устройства или дисплея положения пункционной направляющей или введенного в нее манипуляционного устройства, и способ управления позиционирующим приспособлением ультразвукового зонда, заключающийся в том, что на экране видеоконтрольного устройства или дисплея, входящего в состав системы формирования изображений, отображают фактическую ориентацию и/или перемещение позиционирующего приспособления относительно ультразвуковой головки. Отображение пункционной вспомогательной метки на экране видеоконтрольного устройства или дисплея (например, пункционной вспомогательной линии или пункционной вспомогательной точки) по-3 005391 зволяет еще перед выходом манипуляционных устройств или рабочих инструментов из рабочего канала(полости) пункционной направляющей предварительно рассчитывать на основе ультразвукового изображения их точное конечное положение, а также отслеживать процесс пункции, например, вдоль предварительно рассчитанной пункционной вспомогательной линии, отображаемой в ультразвуковом изображении. В этом случае после продвижения вперед соответствующих рабочих инструментов можно контролировать их фактическое положение по ультразвуковому изображению, формируемому в режиме реального времени, и следить за ходом всей медицинской процедуры. Наряду с методами, основанными на применении моно- или бипланарных стандартных ультразвуковых зондов, можно также использовать и более новые методы ультразвукового исследования, такие, например, как трехмерная ультразвуковая эхография или цветная доплеровская ультразвуковая эхография. С помощью самых разнообразных диагностических или хирургических устройств можно также помимо прочего забирать биоптаты, вводить лекарственные средства, растворы или суспензии клеток, подводить энергию с помощью различных рабочих зондов или вводить, а также целенаправленно позиционировать хирургические инструменты и управлять ими. Согласно еще одному варианту осуществления изобретения в нем предлагается эндолюминальный ультразвуковой зонд, внутри которого и через ультразвуковую головку которого проходит диагностическое или хирургическое устройство, что позволяет с помощью отклоняющего устройства целенаправленно отклонять одновременно ультразвуковую головку и диагностическое или хирургическое устройство в требуемое положение. Соответствующее этому варианту техническое решение обеспечивает достижение значительных преимуществ, прежде всего, при его использовании в лапароскопических ультразвуковых зондах. Положение манипуляционного устройства, введенного в пункционную направляющую, можно рассчитать еще перед его выходом из пункционной направляющей. Расчетное положение манипуляционного устройства, которое оно должно занять после его выхода из пункционной направляющей, отображается в ультразвуковом изображении с помощью пункционной вспомогательной линии или пункционной вспомогательной точки. Положение пункционной вспомогательной линии, соответственно пункционной вспомогательной точки можно изменять и согласованно выбирать с помощью датчика положения одновременно с положением отклоняющего или манипуляционного устройства, находящегося в пункционной направляющей. Управляемое отклоняющее устройство пункционной направляющей ультразвукового зонда позволяет с исключительно высокой точностью позиционировать, например, инъекционные иглы в полых органах, сосудах, суставах и полостях тела. Благодаря этому впервые становится возможным достаточно точно и контролируемым образом вводить в организм пациента лекарственные средства, клетки и терапевтически активные вещества, при этом место, к которому подводится диагностическое или хирургическое устройство, можно изменять, а также намечать и выбирать еще перед собственно введением диагностического или хирургического устройства в тело пациента. С помощью подобного ультразвукового зонда в тело пациента через рабочую полость пункционной направляющей можно целенаправленно вводить на основе ультразвуковых изображений диагностические или хирургические устройства всех типов, при этом такая методика обладает всеми преимуществами, присущими наименее инвазивным хирургическим методам лечения. Согласно еще одному варианту осуществления изобретения эндолюминальный ультразвуковой зонд представляет собой бипланарный стандартный ультразвуковой зонд, который в дополнение к описанным выше инъекционным устройствам имеет перфузионный канал или съемный перфузионный катетер. Преимущество этого варианта состоит в возможности получения ультразвуковых изображений в продольной плоскости. Согласно следующему варианту предлагаемый в изобретении ультразвуковой зонд оснащен датчиком давления. Подобный эндолюминальный ультразвуковой зонд позволяет не только целенаправленно инъецировать на основе ультразвуковых изображений наполнители в стенку, например, мочеиспускательного канала, но и с использованием того же самого устройства контролировать в процессе терапевтического лечения профиль давления в уретре (и тем самым эффект лечения). Такой датчик давления содержит, например, известный как таковой манометр (например, с мембраной, степень прогиба которой изменяется при изменении действующего на нее давления и которая тем самым передает информацию об изменении давления, например через столб жидкости, в измерительный преобразователь), с помощью которого можно определять профиль давления в просвете, например, мочеиспускательного канала. В изобретении предлагается также медицинский рабочий инструмент, который образует позиционирующее приспособление для диагностических зондов и иных диагностических или манипуляционных устройств. Такое позиционирующее приспособление имеет цилиндрический рабочий канал, внутренний диаметр которого предпочтительно составляет от 1 до 7 мм и который предназначен для размещения в нем по меньшей мере одного диагностического зонда (например, ультразвукового зонда, эндоскопа и/или зонда для магнитно-резонансной томографии). В стенке этого рабочего канала предусмотрен по меньшей мере еще один рабочий канал, в который вводится дополнительное диагностическое или хирургическое устройство. Подобный дополнительный рабочий канал может быть также предусмотрен в до-4 005391 полнительной насадочной втулке, надеваемой на цилиндрический рабочий канал. Эта насадочная втулка также может иметь отклоняющее устройство для диагностического зонда либо манипуляционного или диагностического устройства. Насадочную втулку, которая образует перемещаемое манипуляционное устройство, можно надевать снаружи на эндоскоп, цистоскоп или иной используемый для исследования тканей и органов или для диагностики инструмент. Тем самым достигается несколько функциональных преимуществ перед обычными медицинскими рабочими инструментами. Во-первых, насадочная втулка с манипуляционным устройством является простой в изготовлении (например, отливается под давлением). Во-вторых, насадочную втулку можно выполнить в виде изделия одноразового использования, заменяемого после каждого его применения. Втретьих, в насадочной втулке можно предусмотреть перфузионный канал или катетер, которые в результате становятся неотъемлемой частью изделия одноразового использования. Предлагаемый в изобретении медицинский рабочий инструмент обладает и более высокой стерильностью по сравнению с обычными устройствами с проходящим внутри них перфузионным каналом, который необходимо стерилизовать после каждого использования устройства. Объектом изобретения является далее способ исследования и/или лечения тканей или органов с помощью предлагаемого в изобретении ультразвукового зонда. Этот способ можно осуществлять с применением или без применения пункционной вспомогательной метки, отображаемой на экране видеоконтрольного устройства или дисплея. Согласно одному из предпочтительных вариантов осуществления предлагаемого в изобретении способа ультразвуковой зонд в зависимости от цели его применения сначала позиционируют на или в представляющей интерес ткани или представляющем интерес органе. После этого в действие приводят позиционирующее приспособление таким образом, чтобы пункционная направляющая заняла определенное положение по отношению к ультразвуковой головке, описываемое соответствующими относительными координатами. Затем в позиционирующее приспособление вводят соответствующее манипуляционное устройство (диагностическое или хирургическое устройство), которое далее перемещают до упора и приводят в действие в этом рабочем положении. В таком рабочем положении манипуляционное устройство при необходимости можно перемещать вдоль пункционной вспомогательной метки. Управляет этим перемещением управляющее устройство. Основные стадии предлагаемого в изобретении способа позиционирования диагностических или хирургических устройств состоят в позиционировании зонда в теле пациента с его подводом к исследуемой или оперируемой ткани, в установке позиционирующего приспособления в определенной ориентации и во введении и при необходимости приведении в действие диагностического или хирургического устройства. Объектом изобретения является также способ введения в организм путем инъекции живых клеток в среде-носителе и/или биоматериалов либо биосовместимых веществ, в котором применяют предлагаемый в изобретении ультразвуковой зонд. Ниже изобретение описано на примере зонда с ультразвуковой головкой, чем, однако, не ограничена область его применения. Во всех рассмотренных ниже вариантах зонд может также оснащаться так называемой МРТ-головкой, которая хорошо известна по магнитно-резонансной томографии (МРТ). Другие преимущества и отличительные особенности изобретения более подробно рассмотрены ниже со ссылкой на прилагаемые чертежи, на которых показано: на фиг. 1-4 - различные варианты выполнения предлагаемого в изобретении ультразвукового зонда,показанного схематично и частично в разрезе,на фиг. 5 а, 5 б - схематичные изображения, иллюстрирующие предлагаемое в изобретении отображение пункционных вспомогательных меток на экране видеоконтрольного устройства или дисплея,на фиг. 6-9 - другие варианты выполнения предлагаемого в изобретении ультразвукового зонда, показанного частично в разрезе, и на фиг. 10 - различные варианты выполнения предлагаемого в изобретении медицинского рабочего инструмента, схематично показанного в поперечном сечении. В настоящем изобретении предлагается управляемый ультразвуковой диагностический и хирургический инструмент, с помощью которого впервые становится возможным целенаправленно вводить в ткань на основе ультразвуковых изображений диагностические и хирургические устройства под изменяемым или регулируемым относительно оси ультразвукового зонда в ультразвуковой головке углом и на рассчитываемом расстоянии от ультразвуковой головки. Существенное преимущество предлагаемой в изобретении конструкции перед существующими инструментами состоит в возможности позиционирования манипуляционного устройства, введенного в пункционную направляющую, на любом произвольно выбираемом расстоянии от ультразвуковой головки ультразвукового зонда при заданном положении ультразвукового зонда. Пункционная направляющая нового типа работает во взаимодействии по меньшей мере с одним отклоняющим устройством, управление которым с помощью соответствующего управляющего устройства позволяет отклонять пункционную направляющую и/или введенное в нее манипуляционное устройство от ультразвукового зонда или перемещать вдоль него.-5 005391 Путем математических расчетов одновременно можно вычислять положение введенного в пункционную направляющую манипуляционного устройства перед его выведением из пункционной направляющей и отображать в виде пункционной вспомогательной линии или пункционной вспомогательной точки вычисленное конечное положение манипуляционного устройства перед его выведением из пункционной направляющей в воспроизводимом на соответствующем мониторе ультразвуковом изображении. Тем самым еще собственно перед оперативным вмешательством со стороны проводящего диагностическое исследование персонала или хирурга можно предварительно рассчитать и выбрать с помощью управляющего устройства в процессе оперативного вмешательства угол введения и конечное положение диагностического или хирургического устройства. В этом случае работу с диагностическим или хирургическим устройством (например, введение иглы) можно точно контролировать с помощью ультразвукового изображения, формируемого в режиме реального времени. Ниже изобретение более подробно рассмотрено на примере предпочтительных вариантов его осуществления, в соответствии с которыми ультразвуковой зонд оснащен ультразвуковой головкой К, которая закреплена на конце стержня S и вручную перемещается вместе с ним, при этом позиционирующее приспособление Р расположено на стержне S или в нем. Следует, однако, отметить, что настоящее изобретение не ограничено подобной компоновкой. В другом варианте позиционирующее приспособление с регулируемой по положению пункционной направляющей можно также расположить непосредственно на ультразвуковой головке К или на рукоятке G. На прилагаемых к описанию чертежах подробно показаны только позиционирующее приспособление и система формирования пункционной вспомогательной метки. Конструктивные же особенности ультразвукового зонда с рукояткой, стержнем и ультразвуковой головкой хорошо известны и поэтому,равно как система формирований изображений, в описании подробно не рассматриваются. На фиг. 1 схематично показан выполненный по первому варианту предлагаемый в изобретении ультразвуковой зонд с рукояткой G, стержнем S и ультразвуковой головкой К. Позиционирующее приспособление смонтировано на стержне S и образовано пункционной направляющей F и отклоняющим устройством AV. Пункционная направляющая имеет в качестве направляющего элемента трубчатую или щелевидную полость L, которая в качестве рабочего канала проходит сквозь пункционную направляющую F и отклоняющее устройство AV. Ориентацию рабочего канала в отклоняющем устройстве AV можно изменять относительно зонда. Пункционная направляющая F и отклоняющее устройство AV образуют удлиненный, соответственно вытянутый в продольном направлении узел, расположенный параллельно оси стержня S. Рабочий канал или полость проходят в отклоняющем устройстве AV под заданным углом к оси стержня. Отклоняющее устройство AV и пункционную направляющую F можно целенаправленно перемещать с помощью управляющего устройства SV вдоль стержня S ультразвукового зонда. При таком перемещении изменяется расстояние между манипуляционным устройством М, находящимся в рабочем канале или рабочей полости L, и ультразвуковой головкой К. Подобное перемещение может носить дискретный или плавный характер с фиксацией в требуемом положении. В рассматриваемом варианте для фиксации отклоняющего устройства и пункционной направляющей в требуемом положении при их дискретном перемещении управляющее устройство снабжено фиксатором в виде выступа z на пункционной направляющей F, который утапливается в одну из нескольких имеющихся на ультразвуковом зонде выемок, а и размеры, и форма которого точно пригнаны к размерам и форме этих выемок. Пункционная направляющая F является гибкой, и поэтому ее можно слегка приподнять над стержнем или отвести от него вбок и переместить вместе с отклоняющим устройством и установить в новое положение. После заскакивания имеющегося у пункционной направляющей F выступа в соответствующую выемку положение пункционной направляющей F, отклоняющего устройства AV и введенного в них манипуляционного устройства М коррелировано с соответствующими пункционными вспомогательными линиями или пункционными вспомогательными точками в ультразвуковом изображении, воспроизводимом на экране видеоконтрольного устройства или дисплея. Манипуляционное устройство М,расположенное в полости L, представляет собой, например, пункционную иглу или катетер. Для фиксации отклоняющего устройства и пункционной направляющей в требуемом положении при их плавном перемещении вместо выступа можно использовать пригодное для этой цели разъемное соединение, например зажимное кольцо. Ультразвуковая головка K имеет хорошо известную конструкцию и в зависимости от цели ее применения имеет один или несколько акустических преобразователей (элементов-преобразователей) для излучения, соответственно приема ультразвуковых колебаний. Ультразвуковая головка K по своей конструкции может быть предназначена для формирования унипланарных или бипланарных ультразвуковых изображений в режиме реального времени или доплеровских, цветных доплеровских либо трехмерных ультразвуковых изображений. Стержень S в зависимости от цели применения выполнен из гибкого или жесткого материала. Соответственно и пункционная направляющая F также выполнена по меньшей мере частично гибкой или жесткой. В случае эндолюминального ультразвукового зонда диаметр его ультразвуковой головки K обычно составляет от 5 до 10 мм. Полость L в отклоняющем устройстве AV проходит по изогнутой или ломаной относительно продольной оси стержня S линии. Обращенный к ультразвуковой головке K конец полости L образует с осью стержня определенный, постоянный угол отклоне-6 005391 ния, которым задается наклон манипуляционного устройства М относительно оси стержня. Перемещение отклоняющего устройства с задействованием управляющего устройства позволяет тем самым регулировать положение манипуляционного устройства М его перемещением в одном из направлений, обозначенных на чертеже двунаправленной стрелкой. Пункционная направляющая жестко или неподвижно соединена со стержнем ультразвукового зонда, однако, ее при необходимости можно снять со стержня и заменить. Согласно схематично показанному на фиг. 2 варианту выполнения предлагаемого в изобретении ультразвукового зонда с рукояткой G, стержнем S и ультразвуковой головкой K пункционная направляющая F вместе с имеющейся у нее полостью L также закреплена на стержне S сбоку. В этом варианте отклоняющее устройство AV объединено с пункционной направляющей F. Управляющее устройство SV образовано аксиальным сервоприводом, расположенным на стержне S. Для осевого перемещения манипуляционного устройства М в направлении, указанном двунаправленной стрелкой, пункционная направляющая F выполнена с возможностью ее перемещения с помощью управляющего устройства в осевом направлении параллельно оси стержня, что обеспечивает также перемещение вместе с ней введенного в нее манипуляционного устройства. При таком перемещении, в свою очередь, изменяется расстояние между наклонно выступающим из пункционной направляющей манипуляционным устройством и ультразвуковой головкой. В зависимости от положения, в котором находится отклоняющее устройство AV,конец манипуляционного устройства М занимает по отношению к ультразвуковой головке K определенное положение, описываемое соответствующими относительными координатами. Регулируемая установка отклоняющего устройства AV и/или пункционной направляющей F в определенное положение одновременно обеспечивает позиционирование манипуляционного устройства М,конец которого в результате устанавливается по отношению к ультразвуковой головке в определенное положение, описываемое соответствующими относительными координатами. В этом случае предполагается, что длина, на которую манипуляционное устройство М введено вглубь пункционной направляющей и/или отклоняющего устройства, является известной или определенным образом отрегулированной величиной. Для задания такой длины, на которую манипуляционное устройство М вводится вглубь пункционной направляющей и/или отклоняющего устройства, на пункционной направляющей или в отклоняющем устройстве AV предпочтительно предусмотрен упор (не показан), который взаимодействует с соответствующим выступом на манипуляционном устройстве М. Однако подобный упор можно также предусмотреть на рукоятке или какой-либо иной части ультразвукового зонда или же его можно вовсе не предусматривать при использовании на манипуляционном устройстве М меток, с помощью которых можно точно определить длину его введения вглубь пункционной направляющей и/или отклоняющего устройства, имеющихся у ультразвукового зонда. Ультразвуковая головка, прежде всего, при выполнении стержня S из гибкого материала предпочтительно оснащена зажимным приспособлением для ее временной фиксации на исследуемой ткани. Такое зажимное приспособление, которое может быть выполнено, например, в виде задействуемых со стороны рукоятки щипцов Z, позволяет позиционировать ультразвуковую головку в теле пациента перед введением манипуляционного устройства. Для фиксации ультразвуковой головки можно также предусмотреть надувной баллон. На фиг. 3 схематично показан эндолюминальный ультразвуковой зонд, входящие в состав позиционирующего приспособления которого пункционная направляющая F с полостью L, в которую вводится манипуляционное устройство М, и отклоняющее устройство AV выполнены в виде отдельных деталей. Отклоняющее устройство смонтировано на стержне ультразвукового зонда, соответственно на ультразвуковой головке. В этом варианте управляющее устройство позволяет управлять отклоняющим устройством таким образом, чтобы изменять угол выхода вдвинутого в пункционную направляющую диагностического или хирургического устройства после его выведения из пункционной направляющей. Отклоняющее устройство может перемещаться в продольном направлении ультразвукового зонда или также под прямым углом к этому продольному направлению ультразвукового зонда (см. двунаправленные стрелки). На фиг. 4 показан несколько модифицированный вариант осуществления изобретения, согласно которому пункционная направляющая интегрирована в стержень S ультразвукового зонда. В этом варианте в стержне S помимо сигнальных проводов, идущих к ультразвуковой головке K и от нее, проходит полость L пункционной направляющей. Отклоняющее устройство AV расположено между стержнем S и ультразвуковой головкой К и позволяет выводить манипуляционное устройство М из пункционной направляющей под наклоном к ее оси и/или в осевом направлении. Для изменения угла выхода манипуляционного устройства М из пункционной направляющей или его осевого положения отклоняющее устройство AV соответствующим образом приводится в действие с помощью управляющего устройства. В показанных на фиг. 1-4 вариантах для приведения отклоняющих устройств AV в действие может использоваться любой механический, электромеханический, магнитомеханический (гиромагнитный) либо пьезоэлектрический привод или же ручная регулировка положения (ручной регулятор положения). Подобные приводы и регуляторы положения широко известны, прежде всего, по микрохирургической и лабораторной технике.-7 005391 В предлагаемом в изобретении ультразвуковом зонде можно также использовать и иные отклоняющие устройства, обеспечивающие возможность контролируемого и управляемого отклонения манипуляционного устройства вбок и допускающие возможность управления ими соответствующим управляющим устройством. В общем случае манипуляционное устройство представляет собой диагностическое или хирургическое устройство, такое, например, как пункционная игла, биопсийная игла, инъекционная игла, катетер или микрохирургический инструмент. Согласно наиболее предпочтительному варианту осуществления изобретения манипуляционное устройство содержит устройство подачи жидкости, катетер и инъекционную иглу. Использование подобной системы позволяет на основе ультразвуковых изображений целенаправленно вводить с помощью устройства подачи в определенную область ткани или в орган через катетер и инъекционную иглу лекарственное средство, раствор или суспензию с биологическими или биосовместимыми материалами или суспендированными компонентами, такими, например, как живые клетки или имплантируемые в организм материалы. На выходном конце полости пункционной направляющей можно предусмотреть интегрированную в нее или насаживаемую в виде отдельной детали впрыскивающую головку. Система, состоящая из устройства подачи жидкости, катетера и инъекционной иглы, может быть рассчитана на впрыскивание соответствующего материала под повышенным давлением ("продавливание" препаратов в виде так называемых "наполнителей" ("bulking agents". Особое преимущество изобретения состоит в возможности воспроизводимого позиционирования введенного в пункционную направляющую манипуляционного устройства с помощью имеющего сравнительно простую конструкцию отклоняющего устройства, с помощью которого задается угол наклона полости в пункционной направляющей относительно стержня. Если манипуляционное устройство выполнено, например, из пружинящей высококачественной стали, то оно может принимать в отклоняющем устройстве изогнутую форму, однако, из полости пункционной направляющей оно выходит в выпрямленном виде. Согласно другим, не показанным на чертежах вариантам осуществления изобретения у одного ультразвукового зонда можно предусмотреть несколько пункционных направляющих, которые предназначены для одновременного направленного перемещения по ним и позиционирования нескольких манипуляционных устройств и положение которых можно изменять на основе получаемых ультразвуковых изображений. Так, например, на стержне можно предусмотреть несколько отклоняющих устройств,обеспечивающих наличие нескольких трубчатых или щелевидных направляющих полостей. В другом варианте такие направляющие полости можно интегрировать непосредственно в стержень. Манипуляционное устройство, если им является хирургический рабочий инструмент, может представлять собой также щипцы, зажим, пинцет, ножницы и/или скальпель. В этом случае манипуляционное устройство для приведения его в действие при необходимости соединяется с внешним приводным устройством. Помимо этого и для пункционной направляющей можно предусмотреть дополнительное приводное устройство, предназначенное для ее поворота, соответственно наклона или перемещения на стержне ультразвукового зонда. Согласно еще одному предпочтительному варианту осуществления изобретения ультразвуковой зонд оснащен эндоскопом. Такой эндоскоп может быть выполнен в виде манипуляционного устройства,снабженного пункционной направляющей. В другом варианте эндоскоп может представлять собой отдельный узел на ультразвуковом зонде. Помимо этого и само манипуляционное устройство может быть образовано зондом с ультразвуковой головкой. Особое преимущество изобретения состоит в наличии у пункционной направляющей сравнительно простой конструкции. Благодаря этому рукоятку, стержень, ультразвуковую головку и/или пункционную направляющую можно выполнить полностью или частично в виде изделий одноразового использования. Одна из существенных отличительных особенностей изобретения заключается в том, что манипуляционное устройство с пункционной направляющей занимает строго определенное положение относительно ультразвуковой головки или перемещается строго определенным образом относительно нее. На основе установочных параметров пункционной направляющей и геометрических параметров манипуляционного устройства можно определить относительные координаты положения, занимаемого этими пункционной направляющей и манипуляционным устройством по отношению к ультразвуковой головке,и использовать эти относительные координаты для соответствующего преобразования в целях предлагаемой в изобретении индикации пункционной вспомогательной метки в системе формирования изображений, имеющейся у ультразвукового зонда. Сказанное проиллюстрировано на фиг. 5 а и 5 б. На фиг. 5 а показано изображение в поперечной плоскости, воспроизводимое на экране схематично показанного монитора М системы формирования изображений и получаемое с помощью эндолюминального ультразвукового зонда. В этом изображении в качестве пункционной вспомогательной метки отображается пункционная вспомогательная точка HP, формируемая для управления отклоняющим устройством входящим в состав управляющего устройства датчиком положения. Положение пункционной вспомогательной точки HP относительно занимаемого ультразвуковым изображением поля UF определяется на экране монитора на основе информации о положении, выдаваемой управляющим устройством в соответствии с фактической ориентацией позиционирующего приспособления. Благодаря этому по-8 005391 ультразвуковому изображению можно определить и целенаправленно изменить положение вдвинутого в пункционную направляющую диагностического или хирургического устройства еще перед его выходом из пункционной направляющей. На фиг. 5 б в качестве пункционной вспомогательной метки показана пункционная вспомогательная линия HL, отображаемая на изображении, получаемом в продольной плоскости с помощью ультразвукового зонда. По такому ультразвуковому изображению также можно определить и целенаправленно изменить положение вдвинутого в пункционную направляющую диагностического или хирургического устройства еще перед его выходом из пункционной направляющей. Помимо этого по ультразвуковому изображению, формируемому в режиме реального времени, можно точно отслеживать продвижение диагностического или хирургического устройства. Пункционная вспомогательная линия HL может также отражать участок пути, который при соответствующем приведении отклоняющего устройства в действие проходило бы вставленное в позиционирующее приспособление манипуляционное устройство во вдвинутом в пункционную направляющую состоянии. Процедура введения в организм живых клеток в среде-носителе и/или биоматериалов либо биосовместимых веществ путем инъекции включает согласно изобретению следующие стадии. Ультразвуковой зонд вводят предпочтительно в полые органы, такие, например, как желудочнокишечный тракт, мочеполовой тракт, полость носа и околоносовые пазухи, в дыхательные пути, суставы,полости тела, такие, например, как брюшная полость, грудная полость, полость черепа, полость таза, в пункционный канал, сосуды или вводят во время операции в оперируемую область. Ультразвуковой зонд вводят либо со вставленным в него манипуляционным устройством, которым в данном случае является инъекционное устройство, либо без такового. После этого, при необходимости с применением пункционной вспомогательной метки, в требуемое положение устанавливают позиционирующее приспособление и при необходимости вставляют в него инъекционное устройство. Инъекционное устройство соединено с емкостью, в которой содержится вводимое инъекцией вещество. При этом речь предпочтительно идет об инъекции лекарственных средств, жидкостей, растворов, суспензий с биологическим или биосовместимым материалом и/или суспензий с живыми клетками, в частности с носителями или без них. Так,например, в целях терапевтического лечения недержания мочи или кала инъекцию делают трансуретрально или трансректально. Для этого в представляющую интерес область ткани инъецируют миобласты,наполнители ("bulking agents"), например коллагены, фармакологические вещества и/или факторы роста. Миобласты применяют индивидуально либо или в сочетании с биосовместимыми материалами (наполнителями ("bulking agents" в качестве имплантируемых веществ. Процесс инъекции контролируют с помощью ультразвукового наблюдения. На фиг. 6 показан еще один вариант выполнения предлагаемого в изобретении ультразвукового зонда, который оснащен отклоняющим устройством AV для манипуляционного устройства М, имеющим одно из описанных выше конструктивных исполнений и дополнительно имеющим перфузионный канал(или перфузионный катетер) РK. Компоненты и детали ультразвукового зонда, если они аналогичны таковым, рассмотренным в предыдущих вариантах, обозначены теми же позициями, что и на фиг. 1-4. В этом варианте отклоняющее устройство AV несколько модифицировано по сравнению с описанными выше вариантами в том отношении, что для приведения манипуляционного устройства М в движение,т.е. для его продвижения в одном или другом направлении, используется зубчатое колесо Z, взаимодействующее с соответствующей зубчатой рейкой а. Перфузионный канал РK проходит параллельно стержню S. Свободный конец перфузионного канала РK расположен перед ультразвуковой головкой К или рядом с ней и выполнен таким образом, чтобы перфузионная жидкость, подаваемая из внешней емкости(не показана), выходила из этого канала и попадала в соответствующий исследуемый просвет, например в мочеиспускательный канал в направлении мочевого пузыря, перед ультразвуковой головкой K или рядом с ней и тем самым позволяла промывать этот просвет. Под действием перфузионной жидкости просвет перед ультразвуковой головкой K расширяется. При этом стенка просвета, например стенка мочеиспускательного канала, отходит вбок от ультразвуковой головки K. В качестве ультразвуковой головки K используется бипланарная ультразвуковая головка, предназначенная для получения ультразвуковых изображений в двух плоскостях распространения ультразвуковых колебаний. Первая плоскость распространения ультразвуковых колебаний позволяет наблюдать просвет в боковом, радиальном направлении. Вторая плоскость распространения ультразвуковых колебаний позволяет наблюдать просвет в осевом направлении. Вторая (или продольная) плоскость распространения ультразвуковых колебаний позволяет получать изображение полости, расширяемой перфузионной жидкостью перед ультразвуковой головкой. В этом заключается существенное преимущество перед традиционными эндоскопическими аппаратами. Зонд можно безопасно вводить в просвет, прежде всего в мочеиспускательный канал, без использования дополнительного эндоскопа (как это предусмотрено, например, в варианте, показанном на фиг. 7). При этом существенно снижается риск повреждения ткани при трансуретральной ультразвуковой эхографии. На противоположном конце перфузионного канала РK установлен клапан V, через который подсоединяется система подачи жидкости. Этим клапаном V предпочтительно управлять таким образом, чтобы обеспечить с помощью предлагаемого в изобретении эндолюминального ультразвукового зонда непрерывное поступление промывочного потока перфузионной жидкости в просвет мочеиспускательного ка-9 005391 нала. При выполнении ультразвукового зонда с перфузионным каналом РK ультразвуковой зонд представляет собой ультразвуковой цистоскоп. Обозначенный на фиг. 6 как "Fix" компонент представляет собой стационарный блок, который используется для осуществления известного метода отвода назад или метода "pull back". При использовании предлагаемого в изобретении ультразвукового зонда и метода "pull back" отдельные ультразвуковые изображения, получаемые в поперечной плоскости при выведении (или аналогично при введении) ультразвукового зонда, можно путем планиметрических расчетов добавлять одно к другому и тем самым реконструировать их в объемное изображение всей стенки мочеиспускательного канала. При этом предусмотрено измерительное устройство с системой датчиков (см. градуировку), с помощью которой определяются относительные координаты ультразвукового зонда по отношению к реперной точке "Fix", положение которой на пациенте остается в ходе всего исследования неизменным. С помощью такой системы датчиков можно управлять перемещением ультразвукового зонда в мочеиспускательном канале и передавать указанные относительные координаты в вычислительное устройство. В последующем на основании отдельных ультразвуковых изображений, полученных в поперечной плоскости, путем соответствующих вычислений создается трехмерная модель мочеиспускательного канала. На свободном конце перфузионного канала РK предусмотрен датчик давления и/или электродное устройство D. Как таковой метод, позволяющий определять профиль давления в просвете, например в мочеиспускательном канале, с помощью датчика давления или манометра, хорошо известен. Однако предлагаемое в изобретении решение позволяет достичь в этом отношении особых преимуществ за счет использования ультразвукового зонда, оснащенного манипуляционным и, прежде всего, инъекционным устройством. Подобный эндолюминальный ультразвуковой зонд позволяет не только целенаправленно инъецировать на основе ультразвуковых изображений наполнители ("bulking agents") в стенку мочеиспускательного канала, но и с использованием того же самого устройства контролировать в процессе терапевтического лечения профиль давления в уретре (и тем самым эффект лечения). Указанное выше электродное устройство D содержит, например, раздражающий или стимулирующий электрод, который расположен непосредственно вблизи ультразвуковой головки и который за счет создания соответствующего поля обеспечивает раздражение или стимуляцию мышечных волокон около мочеиспускательного канала, а также позволяет регистрировать параметры сократимости мышечных волокон в ультразвуковом изображении. Хорошо известно, что электрическую активность мышц, сопровождающую их работу, можно измерить с помощью электродов, накладываемых на поверхность мышечных волокон (с получением электромиограммы). Предлагаемый в изобретении транслюминальный ультразвуковой зонд, оснащенный подобным электродным устройством D, позволяет регистрировать электрическую активность мускулов одновременно с получением ультразвукового изображения. Благодаря этому можно получать важную информацию о функции мышц и мышечной деятельности в мочеиспускательном канале, прежде всего, при диагностике недержания мочи. С помощью так называемой ультразвуковой эластографии (см. Ponnekanti и др., "Ultrasound in Med.Biol.", том 21, 1995, сс. 533-543, и Varghese и др., "Ultrasound in Med. Biol.", том 21, 2000, сс. 533-543) можно определить эластичность, соответственно ригидность исследуемой ткани. При осуществлении этого способа с помощью подвижного элемента исследуемой ткани сообщается механический импульс. Таким подвижным элементом может служить вибрационное устройство, установленное в зонде, или же устройство перемещения, соединенное с фиксированной точкой "Fix", не связанной с обследуемым объектом (пациентом). Параметры ригидности или эластичности исследуемой ткани определяют на основе ультразвуковых изображений до и после определенного ее механического сдавливания. Согласно одному из предпочтительных вариантов выполнения ультразвукового зонда ультразвуковая эластография используется для установления диагноза при недержании мочи путем измерения эластичности мочеиспускательного канала. При проведении подобных измерений в ходе обследования пациента методом ультразвуковой эластографии показанный на фиг. 6 ультразвуковой зонд определенным образом вводят в мочеиспускательный канал, стенка которого подвергается в результате воздействию определенных растягивающих и расслабляющих усилий. Таким путем можно с помощью ультразвукового зонда выявить реакцию стенки мочеиспускательного канала на подобные механические воздействия и количественно оценить ее с помощью ультразвуковой эластографии. На фиг. 7 показан фрагмент предлагаемого в изобретении медицинского рабочего инструмента, выполненного по другому варианту. Такой рабочий инструмент наиболее предпочтительно использовать для инъекции суспензионного состава, описанного в заявке DE 10119522.2, которая включена в настоящее описание в качестве ссылки. Этот рабочий инструмент имеет стержень Sch по меньшей мере с двумя рабочими каналами АК 1, АК 2. В рабочем канале АK1 расположен ультразвуковой зонд US с ультразвуковой головкой K. В предпочтительном варианте осуществления изобретения ультразвуковой зонд US выполнен подвижным в осевом направлении относительно стержня Sch. На стержне Sch предусмотрено измерительное устройство UP, позволяющее определять положение ультразвукового зонда US в рабочем канале относительно стержня Sch. Положение зонда детектируется, например, по имеющимся на его стержне меткам. На основе таких меток определяются координаты, которые могут использоваться для формирования пространственных изображений путем комбинирования отдельных ультразвуковых изо- 10005391 бражений, полученных в продольных плоскостях. Во втором рабочем канале АK2 расположен эндоскоп Е, на обращенном к телу пациента конце которого предусмотрена, например, эндоскопическая линза EL,предназначенная для встроенного освещения исследуемой или подвергаемой соответствующей лечебной или медицинской процедуре ткани. Предпочтительно, чтобы размеры освещаемого углового сектора лежали в пределах от 0 до 90. Рядом со вторым рабочим каналом АK2 и/или эндоскопом Е расположено манипуляционное устройство MV, предназначенное для управления инструментом W. Таким инструментом может быть, например, катетер или игла шприца. Управление инструментом, соответственно приведение его в действие осуществляется описанным выше способом. Инструмент W представляет собой, например, иглу шприца,которая является частью описанных выше устройств смешанного назначения и устройств для локального применения лекарственных средств либо устройств подачи жидкости. При использовании рабочего инструмента, показанного на фиг. 7, его сначала позиционируют в подвергаемой лечебной или медицинской процедуре части тела (например, в полом органе, ткани). Подвергаемую лечебной или медицинской процедуре ткань визуально контролируют с помощью эндоскопа Е. Затем с помощью управляющего устройства или путем ультразвукового контроля позиционируют инструмент W. После этого через инструмент W в представляющую интерес область ткани вводят суспензионный состав, определяя при этом описанным выше путем координаты (прежде всего, конечные координаты) и контролируя процесс введения состава с помощью ультразвукового зонда US. На фиг. 8 и 9 показаны другие варианты конструктивного исполнения предлагаемого в изобретении ультразвукового зонда, несколько модифицированные по сравнению с показанным на фиг. 7 вариантом. Согласно фиг. 8 стержень Sch снабжен двумя рабочими каналами, в которых с возможностью осевого перемещения (двунаправленная стрелка) расположены соответственно ультразвуковой зонд с ультразвуковой головкой K и эндоскоп Е с эндоскопической линзой EL. Снаружи на стержень Sch надета насадочная втулка Н, которая выполнена в виде отдельной и разъемно соединяемой со стержнем Sch детали. Такая насадочная втулка Н образует позиционирующее приспособление Р с отклоняющим устройством AV для инструмента W, введенного в пункционную направляющую F. В насадочной втулке выполнен, кроме того, перфузионный канал РK. Насадочная втулка предпочтительно проходит по всей длине стержня Sch,благодаря чему конец инструмента W располагается вблизи поля зрения диагностических устройств в рабочих каналах. Позиционирующее приспособление Р соединено со стержнем разъемно. При использовании при ультразвуковых исследованиях гибких зондов стержню Sch можно также придать изогнутую углом форму (см. фиг. 9). В этом случае с такой формой стержня согласована и форма насадочной втулки Н, которая выполнена предпочтительно из упруго деформируемого полимерного материала. На фиг. 10 показано расположение насадочной гильзы Н на стержне Sch. Насадочная втулка Н может частично (фиг. 10 а) либо полностью (фиг. 10 б, 10 в) охватывать стержень Sch по его периметру. В первом случае насадочную втулку Н можно надеть на стержень радиально сбоку, тогда в двух других случаях ее можно надеть на стержень только в осевом направлении. В стержне Sch предусмотрены по меньшей мере два рабочих накала. В насадочной втулке Н выполнены перфузионный канал Р и пункционная направляющая F, в которую вставлен инструмент W. В стержне Sch можно предусмотреть также дополнительный перфузионный канал Р (фиг. 10 в). В насадочной втулке Н в зависимости от цели применения предлагаемого в изобретении ультразвукового зонда можно предусмотреть дополнительные,открытые наружу каналы, в которые можно вводить по меньшей мере одно дополнительное перфузионное устройство PV. Такое перфузионное устройство PV предназначено, прежде всего, для радиального промывания той области в организме, в которую введен рабочий инструмент. Подобное перфузионное устройство PV представляет собой, например, съемный катетер, вставленный в U-образное углубление,выполненное в насадочной втулке Н или же в стержне рабочего инструмента. Насадочную втулку Н можно перемещать по стержню Sch и/или поворачивать вокруг него, прежде всего, с целью обеспечить ее установку в точно отрегулированное положение относительно инструментаW. Все рассмотренные в предшествующем описании, в формуле изобретения и представленные на чертежах отличительные особенности изобретения в различных их вариантах могут иметь существенное для осуществления изобретения значение и индивидуально, и в любых их сочетаниях. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Ультразвуковой зонд, содержащий ультразвуковую головку (K), закрепленную на стержне (S) и перемещаемую вместе с ним либо расположенную в стержне (S) и перемещаемую в нем, и позиционирующее приспособление, предназначенное для позиционирования по меньшей мере одного диагностического или хирургического устройства, при этом такое позиционирующее приспособление соединено со стержнем (S) и имеет по меньшей мере одну пункционную направляющую (F) по меньшей мере с одной трубчатой или щелевидной полостью (L) для вставляемого или вводимого в нее диагностического или хирургического устройства (М) и отклоняющее устройство (AV) для отклонения диагностического или- 11005391 хирургического устройства (М), при этом пункционная направляющая (F) и/или отклоняющее устройство (AV) выполнены устанавливающими диагностическое или хирургическое устройство (М) под заданным углом к оси стержня (S), отличающийся тем, что пункционная направляющая (F) и отклоняющее устройство (AV) выполнены с возможностью перемещения параллельно оси стержня (S). 2. Ультразвуковой зонд по п.1, отличающийся тем, что предусмотрена возможность изменять положение пункционной направляющей (F) вместе с отклоняющим устройством (AV) с их установкой в заданной ориентации относительно ультразвуковой головки (K). 3. Ультразвуковой зонд по п.1 или 2, отличающийся тем, что позиционирующее приспособление расположено с наружной стороны стержня (S). 4. Ультразвуковой зонд по п.1, отличающийся тем, что позиционирующее приспособление расположено в стержне (S) и/или между стержнем (S) и ультразвуковой головкой (K). 5. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что для управления отклоняющим устройством (AV) или приведения его в действие предусмотрено управляющее устройство (SV), которое соединено с вычислительным устройством, предназначенным для определения относительных координат полости, выходного отверстия полости или введенного в рабочем состоянии в эту полость диагностического или хирургического устройства (М) по отношению к ультразвуковой головке (K), и с датчиком положения. 6. Ультразвуковой зонд по п.5, отличающийся тем, что он оснащен системой формирования изображений и видеоконтрольным устройством либо дисплеем для воспроизведения ультразвукового изображения, при этом датчик положения соединен с системой формирования изображений и видеоконтрольным устройством либо дисплеем и выполнен с возможностью передачи в эту систему видеоданных,характерных для относительных координат, определенных вычислительным устройством. 7. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что на выходе пункционной направляющей (F) и/или полости (L) расположено приспособление для закрепления иглы. 8. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что пункционная направляющая (F) разъемно соединена с ультразвуковым зондом. 9. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что пункционная направляющая (F) выполнена из стерилизуемого и повторно используемого материала или из материала одноразового использования, предпочтительно из пластмассы, соответственно полимерного материала. 10. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он оснащен эндоскопом. 11. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что на конце полости (L) предусмотрена выходная впрыскивающая головка. 12. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он имеет перфузионный канал или перфузионный катетер, открытый конец которого расположен перед или рядом с ультразвуковой головкой (К). 13. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что на свободном конце стержня (S) имеется датчик давления (D) и/или вибрационное устройство либо устройство перемещения. 14. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он оснащен электродным устройством по меньшей мере один с одним раздражающим или стимулирующим электродом и/или по меньшей мере с одним электродом (D) для регистрации электромиограммы. 15. Ультразвуковой зонд по любому из предыдущих пунктов, отличающийся тем, что он имеет по меньшей мере один съемный крючок и/или по меньшей мере один надувной баллон, позволяющий съемно фиксировать ультразвуковую головку (K), позиционирующее приспособление и/или стержень (S) на исследуемой или подвергаемой лечебной или медицинской процедуре ткани или исследуемом или подвергаемом лечебной или медицинской процедуре органе. 16. Медицинский инструмент, содержащий ультразвуковой зонд по любому из предыдущих пунктов и по меньшей мере одно расположенное в позиционирующем приспособлении диагностическое или хирургическое устройство (М). 17. Медицинский инструмент по п.16, в котором диагностическим или хирургическим устройством является биопсийная игла, пипетка, катетер, инъекционная игла, хирургический рабочий инструмент,рабочий зонд, предпочтительно лазерный зонд, зонд для коагуляции, высокочастотный зонд, радиочастотный зонд или криозонд, ультразвуковой зонд и/или эндоскоп. 18. Медицинский инструмент по п.17, который оснащен гидропневматической системой, позволяющей впрыскивать через полость (L) или через введенную в полость (L) впрыскивающую головку лекарственные средства, растворы, суспензии и/или живые клетки. 19. Позиционирующее приспособление, предназначенное для позиционирования по меньшей мере одного диагностического зонда и содержащее стержень (Sch) по меньшей мере с одним рабочим каналом для вводимого или вставляемого в него диагностического зонда, такого как ультразвуковой зонд, зонд для магнитно-резонансной томографии или эндоскопический зонд, насадочную втулку (Н), причем в стержне или в насадочной втулке (Н) имеется дополнительно канал для вводимого или вставляемого в- 12005391 него диагностического или хирургического устройства, снабженный отклоняющим устройством (AV) для отклонения диагностического или хирургического устройства, при этом отклоняющее устройство(AV) выполнено с возможностью перемещения параллельно оси стержня (Sch), a также с возможностью установки диагностического или хирургического устройства (М) под заданным углом к оси стержня(Sch). 20. Позиционирующее приспособление по п.19, отличающееся тем, что стержень (Sch) или насадочная втулка (Н) имеет канал (Р) для промывания, который оканчивается рядом с концом или перед концом диагностического зонда. 21. Позиционирующее приспособление по п.19 или 20, отличающееся тем, что насадочная втулка(Н) надета на стержень (Sch) с возможностью ее осевого перемещения на заданные расстояния или в соответствии с заданными значениями координат либо с возможностью поворота и имеет отклоняющее устройство для приведения инструмента (W) в действие. 22. Позиционирующее приспособление по любому из пп.19-21, отличающееся тем, что насадочная втулка (Н) выполнена с возможностью ее надевания на стержень (Sch) сбоку. 23. Способ позиционирования и/или приведения в действие диагностического или хирургического устройства либо управления им в организме, заключающийся в том, что в организм вводят ультразвуковой зонд по любому из пп.5-14, медицинский рабочий инструмент по любому из пп.16-18 или позиционирующее приспособление по любому из пп.19-22 и на экране видеоконтрольного устройства или дисплея воспроизводят изображение представляющей интерес ткани или представляющего интерес органа,положение диагностического или хирургического устройства и/или отрезок проходимого им пути задают в воспроизводимом на экране видеоконтрольного устройства или дисплея изображении в виде пункционной вспомогательной метки, воспроизводимой на основе относительных координат, поступивших от датчика положения, и диагностическое или хирургическое устройство перемещают или приводят в действие в позиционирующем приспособлении. 24. Способ по п.23, в котором диагностическое или хирургическое устройство целенаправленно позиционируют в организме. 25. Способ по п.23 или 24, в котором ультразвуковой зонд, медицинский рабочий инструмент или позиционирующее приспособление временно фиксируют в организме с помощью по меньшей мере одного крючка и/или по меньшей мере одного надувного баллона. 26. Способ по любому из пп.23-25, в котором ультразвуковой зонд вводят в полые органы, такие,например, как желудочно-кишечный тракт, мочеполовой тракт, полость носа и околоносовые пазухи, в дыхательные пути, суставы, полости тела, такие, например, как брюшная полость, грудная полость, полость черепа, полость таза, в пункционный канал, сосуды или вводят во время операции в оперируемую область. 27. Способ по любому из пп.23-26, в котором в организм вводят лекарственные средства, жидкости,растворы, суспензии с биологическим или биосовместимым материалом и/или суспензии с живыми клетками, в частности с носителями или без них. 28. Способ введения в организм путем инъекции живых клеток в среде-носителе и/или биоматериалов либо биосовместимых веществ, в котором используют ультразвуковой зонд по любому из пп.1-15,медицинский инструмент по любому из пп.16-18 или позиционирующее приспособление по любому из пп.19-22. 29. Способ по п.28, в котором инъекцию делают трансуретрально или трансректально для терапевтического лечения недержания мочи или кала. 30. Способ по п.29, в котором инъекцией вводят миобласты, фибробласты, наполнители ("bulkingagents"), например коллагены, фармакологические вещества и/или факторы роста. 31. Способ по п.29 или 30, в котором во время или после инъекции определяют профиль давления в уретре, используя датчик давления. 32. Способ по любому из пп.29-31, в котором с помощью раздражающего или стимулирующего электрода за счет создания соответствующего поля обеспечивают раздражение или стимуляцию мышечных волокон около ультразвуковой головки и регистрируют параметры сократимости мышечных волокон в ультразвуковом изображении. 33. Способ по любому из пп.29-32, в котором используют электрод для регистрации электромиограммы. 34. Способ по любому из пп.29-33, в котором ткань с помощью вибрационного устройства или устройства перемещения подвергают механическому возбуждению около ультразвуковой головки (К) и проводят измерения путем ультразвуковой эластографии. 35. Способ формирования пункционной вспомогательной метки на экране видеоконтрольного устройства или дисплея системы формирования изображений, входящей в состав ультразвукового зонда по любому из пп.5-15, заключающийся в том, что на основе относительных координат полости, выходного отверстия полости или введенного в рабочем состоянии в эту полость диагностического или хирургического устройства (М) по отношению к ультразвуковой головке (K) определяют видеоданные пункционной вспомогательной метки.
МПК / Метки
МПК: A61B 8/12
Метки: устройств, зонд, хирургических, диагностических, позиционирующим, приспособлением, ультразвуковой, позиционирования
Код ссылки
<a href="https://eas.patents.su/17-5391-ultrazvukovojj-zond-s-pozicioniruyushhim-prisposobleniem-dlya-pozicionirovaniya-diagnosticheskih-i-hirurgicheskih-ustrojjstv.html" rel="bookmark" title="База патентов Евразийского Союза">Ультразвуковой зонд с позиционирующим приспособлением для позиционирования диагностических и хирургических устройств</a>
Зонд для определения уровня контакта флюидов в пласте
Номер патента: 3378
Опубликовано: 24.04.2003
Авторы: Шерпенисс Виллем, Ван Вюнник Йоханнес Николас Мария
МПК: E21B 47/04
Метки: определения, пласте, контакта, уровня, флюидов, зонд
Формула / Реферат:
1. Зонд для определения уровня контакта флюидов в пласте, содержащий первый зонд давления, содержащий первый датчик давления, установленный в измерительной камере, одна стенка которой выполнена проницаемой для первой среды и непроницаемой для второй среды, при этом указанная стенка измерительной камеры прижата к стенке скважины в течение заранее определенного периода времени, когда первый датчик давления активирован, второй зонд давления,...
Ультразвуковой расходомер
Номер патента: 212
Опубликовано: 24.12.1998
Авторы: Хансен Хеннинг Макс, Лольк Сёрен
Метки: ультразвуковой, расходомер
Формула / Реферат:
1. Ультразвуковой расходомер для измерения расхода жидкостей или газов, проходящих через измерительную трубу, оснащенную ультразвуковыми преобразователями, в котором ультразвук отражается стенкой трубы, имеющей, по меньшей мере, одну фокусирующую отражающую поверхность, причем, по меньшей мере, одна фокусирующая отражающая поверхность (4, 23, 24) является эллипсоидальной, а преобразователи (2, 3) расположены на расстоянии от потока среды в...
Измерительный зонд и способ измерения концентрации реагентов в газах и/или жидкостях
Номер патента: 3262
Опубликовано: 27.02.2003
Авторы: Бишофф Герлинде, Бишофф Роберт
МПК: G01N 27/12
Метки: реагентов, измерительный, способ, газах, зонд, измерения, жидкостях, концентрации
Формула / Реферат:
1. Измерительный зонд, содержащий активный чувствительный слой и пару электродов для обнаружения реагентов и их концентрации в газах и/или жидкостях, отличающийся тем, что активный чувствительный слой измерительного зонда (1) с наружной стороны снабжен покрывной пленкой (7) из жидкости. 2. Измерительный зонд по п.1, отличающийся тем, что покрывная пленка (7) состоит из воды. 3. Измерительный зонд по п.1 или 2, отличающийся тем, что покрывная...
Механизм параллельного позиционирования, в частности, для обработки ,и/или манипулирования, и/или измерения
Номер патента: 4973
Опубликовано: 28.10.2004
Авторы: Петру Франтишек, Сика Збинек, Валасек Михаэль, Вампола Томас, Баума Вацлав
МПК: B23Q 1/56, F16H 21/44
Метки: позиционирования, измерения, обработки, манипулирования, механизм, частности, параллельного
Формула / Реферат:
1. Механизм параллельного позиционирования, в частности, для обработки, и/или манипулирования, и/или измерения, состоящий из платформы для транспортировки и/или манипулирования, например, инструментом, заготовкой, измерительным устройством или тому подобным, соединенной со станиной станка по меньшей мере одним позиционирующим рычагом, отличающийся тем, что платформа (3) шарнирно соединена по меньшей мере с двумя направляющими 4 скольжения...
Хелатные соединения металлов с макроциклическими полиаминокарбоновыми соединениями и их использование для диагностических исследований
Номер патента: 1387
Опубликовано: 26.02.2001
Авторы: Руссо Оливье, Мейер Доминик, Симоно Кристиан, Порт Марк
МПК: C07D 257/02, A61K 49/06
Метки: соединениями, диагностических, использование, металлов, соединения, макроциклическими, хелатные, полиаминокарбоновыми, исследований
Формула / Реферат:
1. Хелатное соединение катиона парамагнитного металла и соединения формулы I где m=1 или 2, R' является Н, (C1-C4)алкильным или гидроксиалкильным радикалом, СН2-СООН, CH2-CONZ1Z2, причем Z1 и Z2 являются независимо друг от друга Н или (C1-C4)алкильным радикалом, возможно гидроксилированным, или R¢ является радикалом НООС-СН-(CH2)m-CONHR, R является радикалом где а=1 или 2, Z является связью, СН2, СН2 CONH или (CH2)2NHCO, Z'...
Предыдущий патент: Способ проведения интерактивной игры
Следующий патент: Устройство для регенерации сточных и минерализованных вод
Случайный патент: Машина для подборки и прессования растениеводческой продукции