Манипулятор для бурильной колонны, в частности трубной манипулятор или система верхнего привода с трубным манипулятором, и способ их эксплуатации
Формула / Реферат
1. Манипулятор для бурильной колонны по меньшей мере с одним штропом элеватора (30), выполненным с возможностью разворота посредством рычага уклона (34), приводимого в действие по меньшей мере одним исполнительным органом (32), отличающийся тем, что содержит средство для регистрации позиции по меньшей мере одного штропа элеватора (30) и передачи соответствующей информации об отклонении.
2. Манипулятор по п.1, который представляет собой манипулятор системы верхнего привода (16), состоящей из неподвижной и вращающейся частей (26, 28), как вращающаяся часть системы верхнего привода (16).
3. Система верхнего привода (16) для манипуляционных операций в бурильной колонне (18), содержащая неподвижную часть (26) и вращающуюся часть (28), причем вращающаяся часть (28) содержит по меньшей мере один штроп элеватора (30), выполненный с возможностью разворота посредством рычага уклона (34), приводимого в действие по меньшей мере одним исполнительным органом (32), отличающаяся тем, что один или каждый исполнительный орган (32) выполнен в виде гидравлического цилиндра, выполняющего функцию приемного элемента, при этом один или каждый гидравлический цилиндр, выполняющий функцию приемного элемента, задействован или задействованы одним или несколькими гидравлическими цилиндрами, выполняющими функцию подающих элементов (58), причем для регистрации отклонения по меньшей мере одного штропа элеватора (30) и передачи соответствующей информации об отклонении предусмотрено средство для выработки электрического сигнала на базе соответствующей позиции по меньшей мере одного подающего элемента (58) и/или на базе измерения потока по гидравлической соединительной линии между подающим элементом (58) и приемным элементом.
4. Система верхнего привода (16) по п.3, в которой средство для выработки электрического сигнала на базе измерения потока по гидравлической соединительной линии выполнено в виде датчика расхода.
5. Способ эксплуатации системы верхнего привода (16) по п.3 или 4, в котором зарегистрированное отклонение по меньшей мере одного штропа элеватора (30) используют для разблокировки или блокировки вертикального движения системы верхнего привода (16) в вышке (10) буровой установки, в частности для разблокировки или блокировки электрического сигнала для приведения в вертикальное движение системы верхнего привода (16).
6. Способ по п.5, в котором разблокировку или блокировку вертикального движения осуществляют в зависимости от вертикальной позиции системы верхнего привода (16).
7. Способ по п.5 или 6, в котором разблокировку или блокировку движения разворота по меньшей мере одного штропа элеватора (30) осуществляют в зависимости от вертикальной позиции системы верхнего привода (16).
8. Способ по любому из пп.5-7, в котором при приведении в действие первого элемента управления оператором сохраняется моментальное значение зарегистрированного отклонения по меньшей мере одного штропа элеватора (30) в качестве заданного значения штроп элеватора,
причем при приведении в действие второго элемента управления активируют по меньшей мере один исполнительный орган (32),
причем изменяющееся при активированном исполнительном органе (32) зарегистрированное отклонение по меньшей мере одного штропа элеватора (30) сравнивается в качестве фактического значения штроп элеватора с заданным значением штроп элеватора и
исполнительный орган (32) деактивируют, если заданное и фактическое значение штроп элеватора совпадают в пределах установленных или устанавливаемых допусков.
9. Способ по п.8, в котором при приведении в действие первого элемента управления сохраняют моментальную вертикальную позицию системы верхнего привода (16) в качестве заданной позиции системы верхнего привода,
причем при задействовании второго элемента управления активируют агрегат для вертикального движения системы верхнего привода (16),
причем изменяющаяся при вертикальном движении системы верхнего привода (16) вертикальная позиция сравнивается в качестве фактической позиции системы верхнего привода с заданной позицией системы верхнего привода и
агрегат для вертикального движения системы верхнего привода (16) деактивируют, если заданная и фактическая позиции системы верхнего привода совпадают в пределах установленных или устанавливаемых допусков.
10. Способ по п.9, в котором активирование исполнительного органа (32) и агрегата для вертикального движения системы верхнего привода (16) осуществляют одновременно или последовательно, в частности последовательно, при этом сначала вертикально перемещают систему верхнего привода (16), а затем разворачивают по меньшей мере один штроп элеватора (30).

Текст
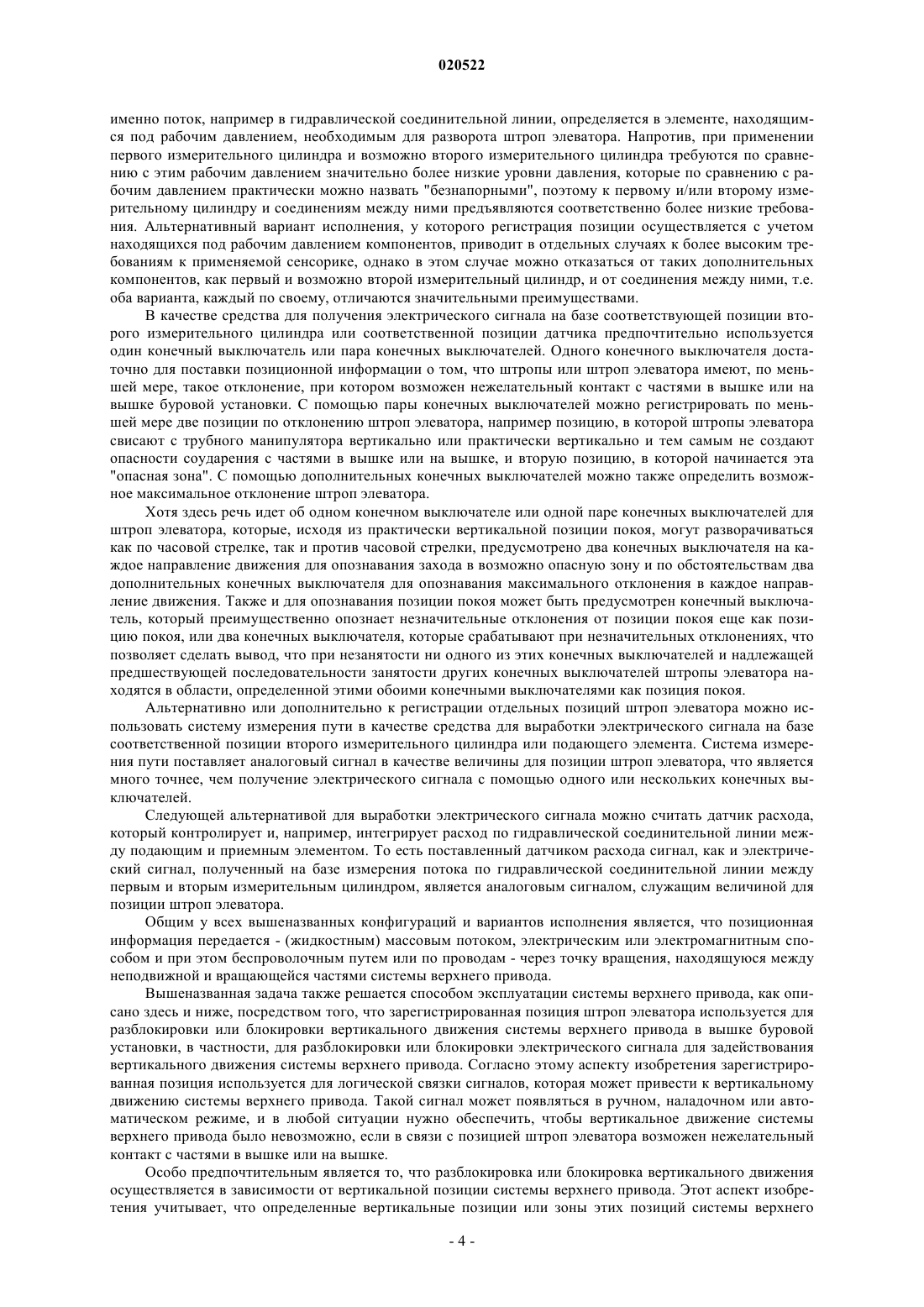
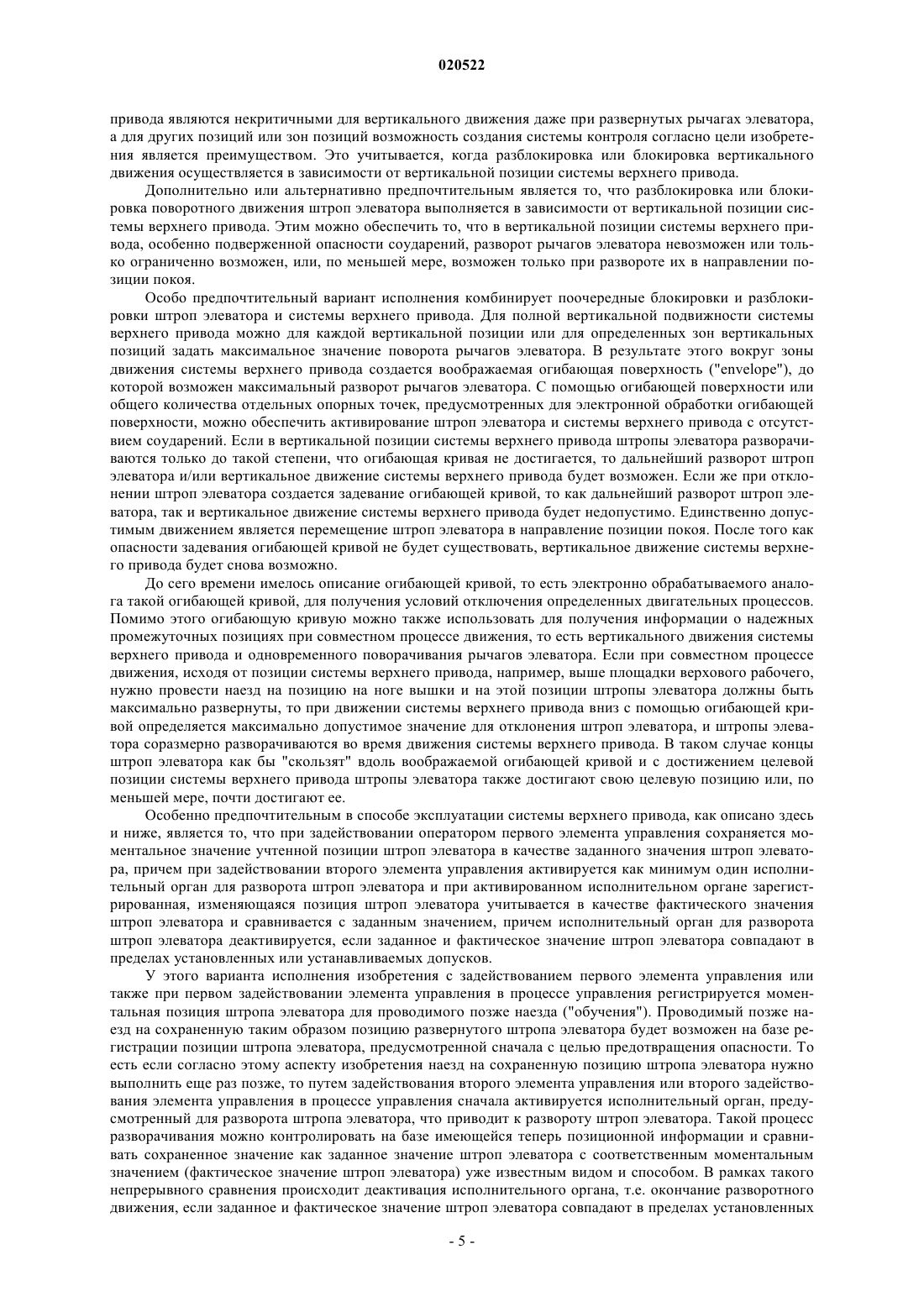
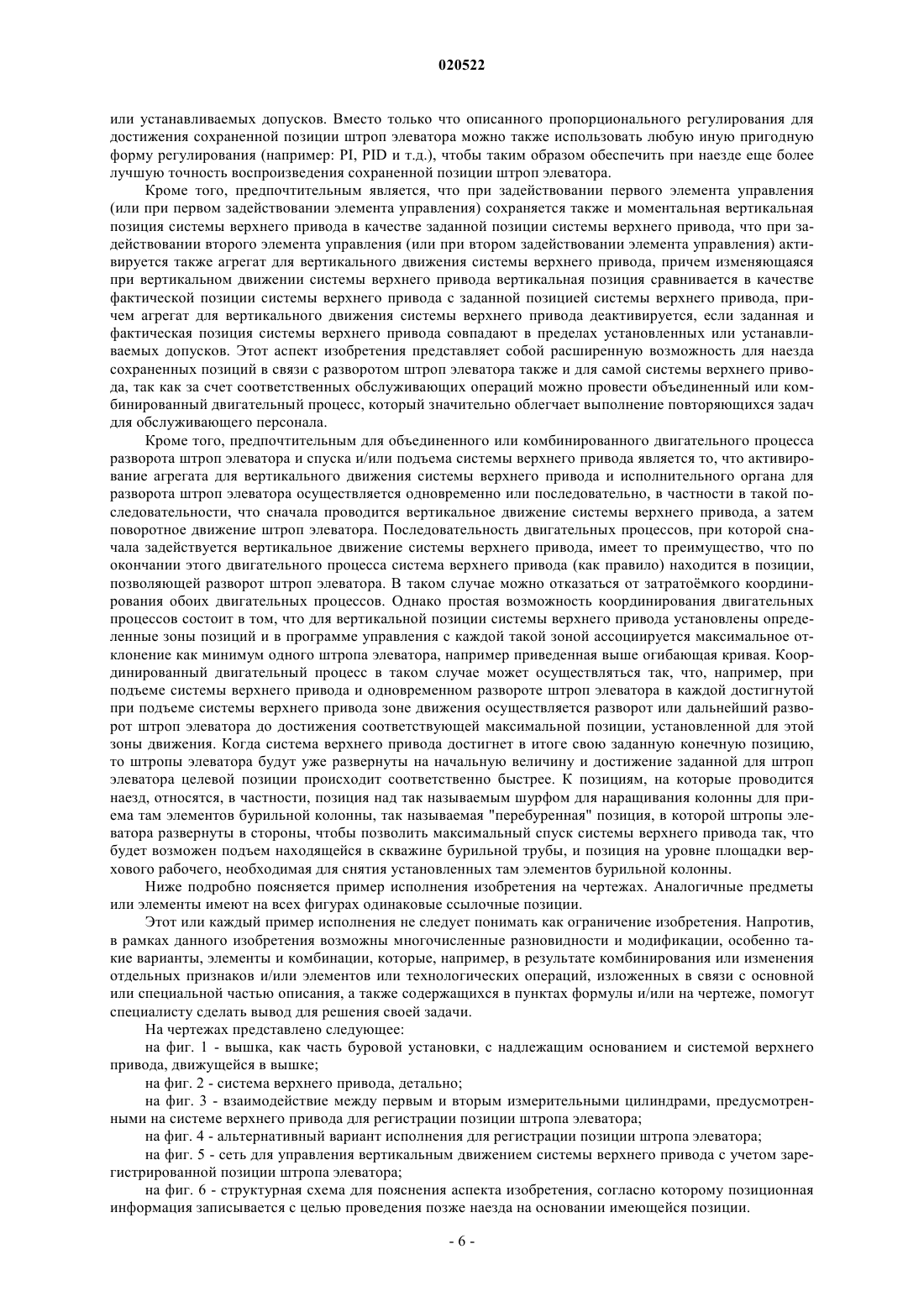
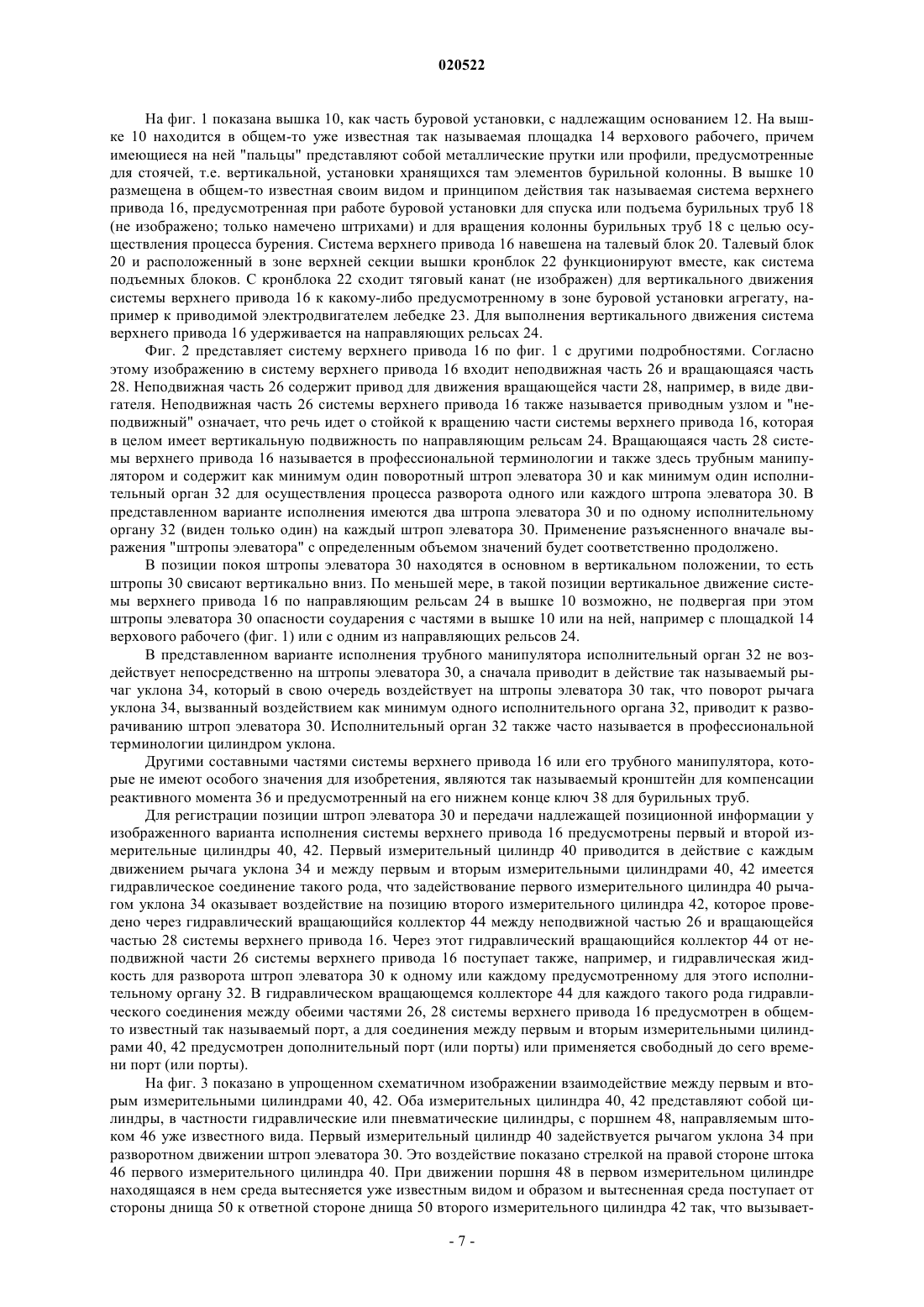
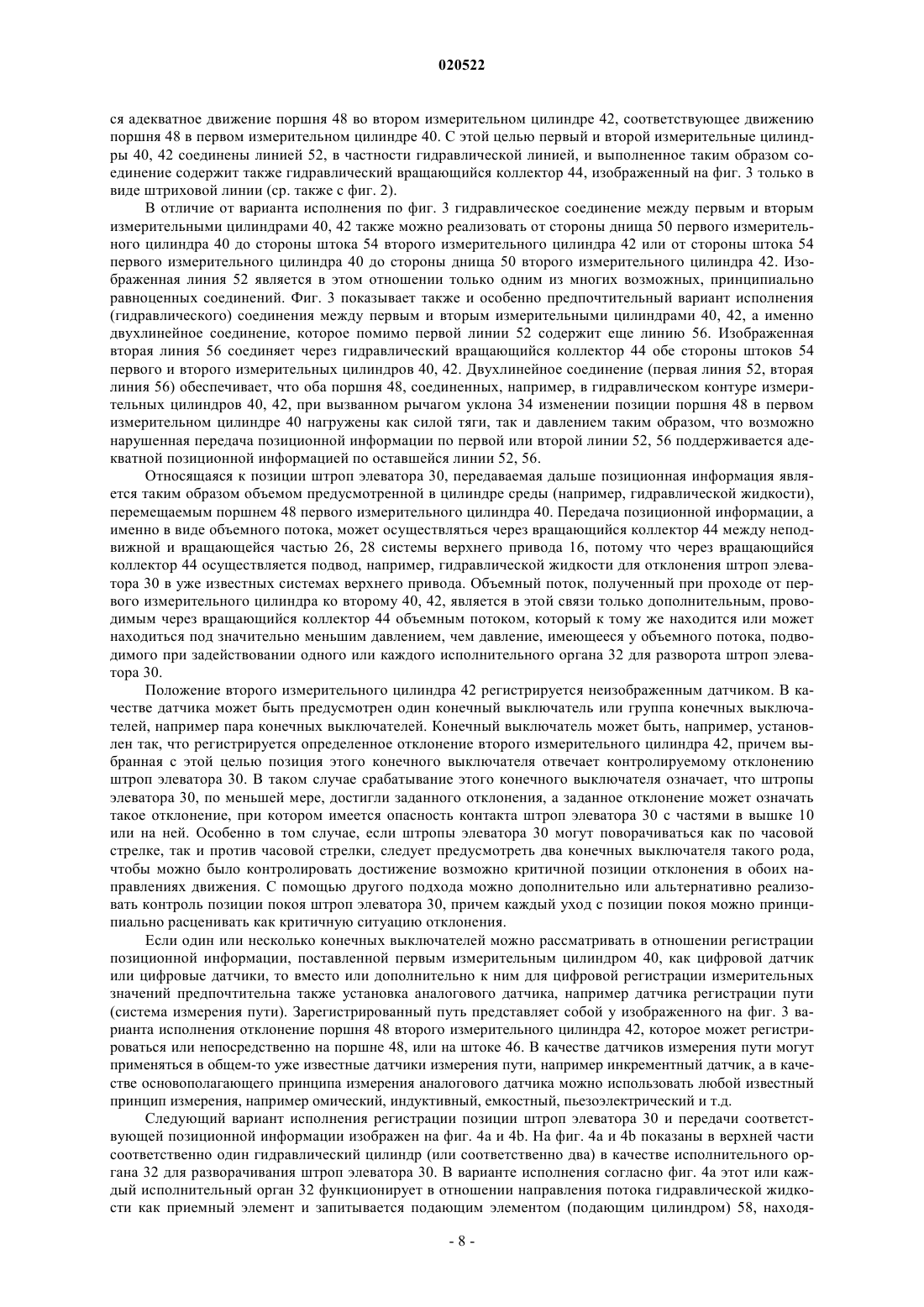
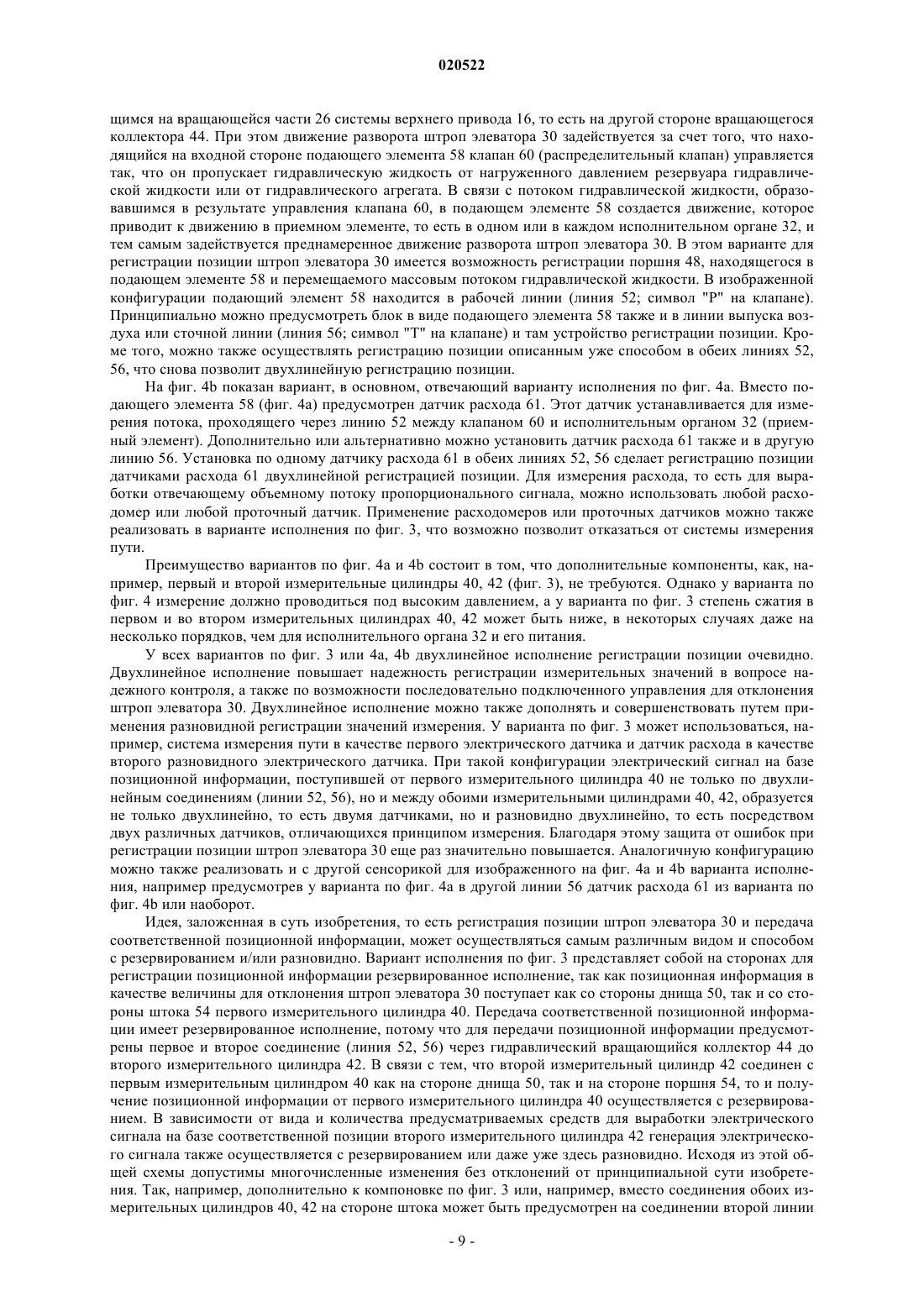
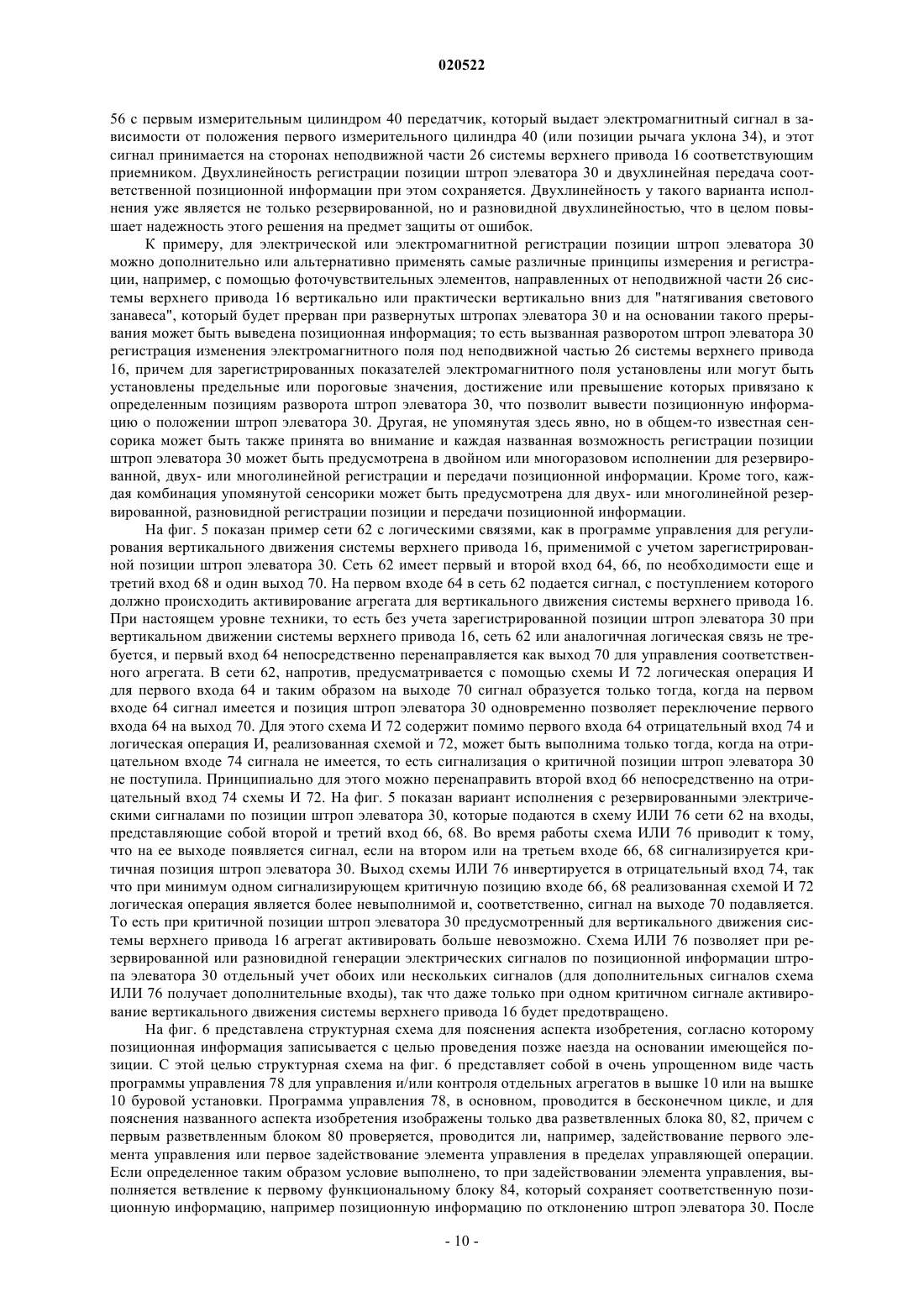
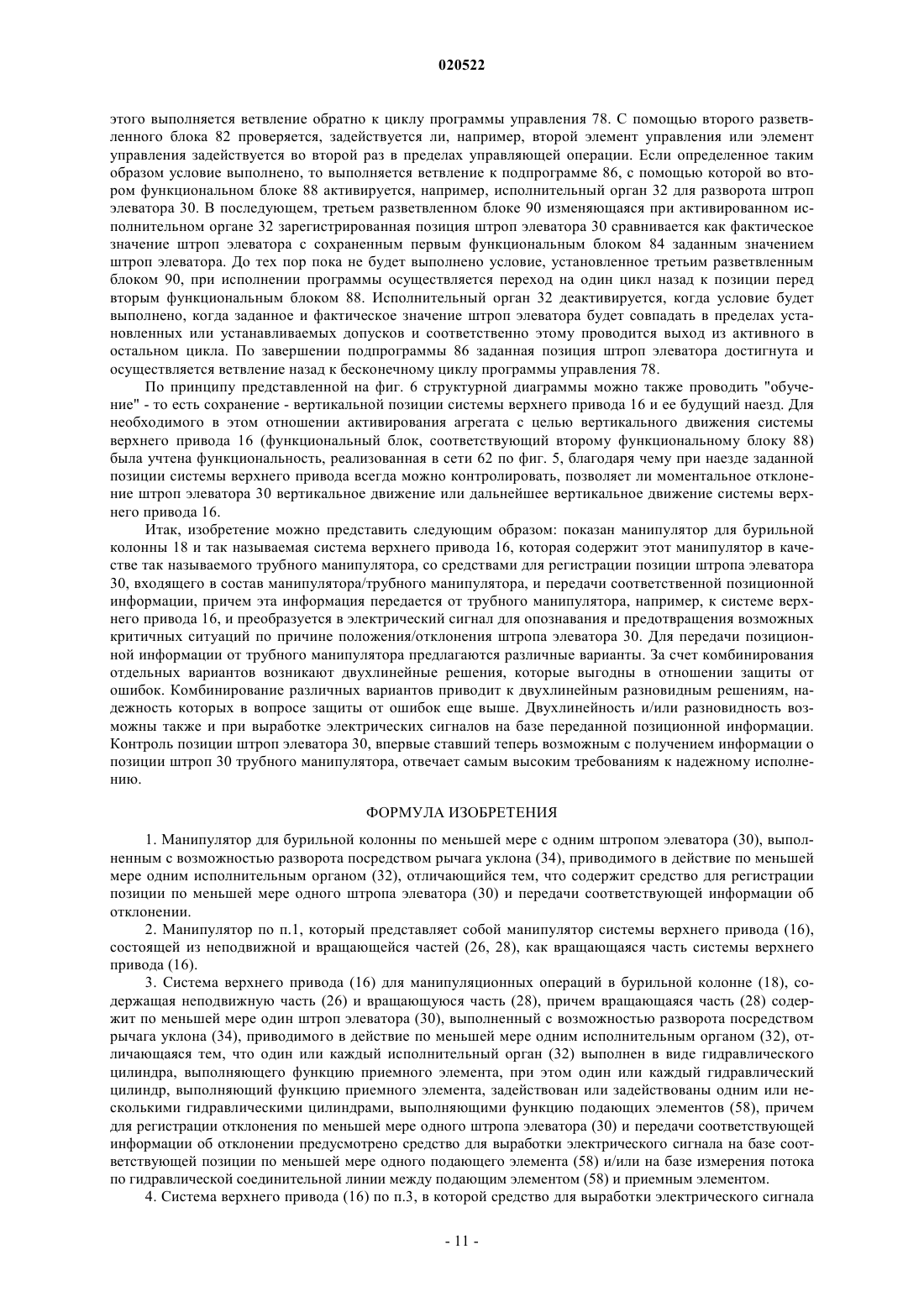
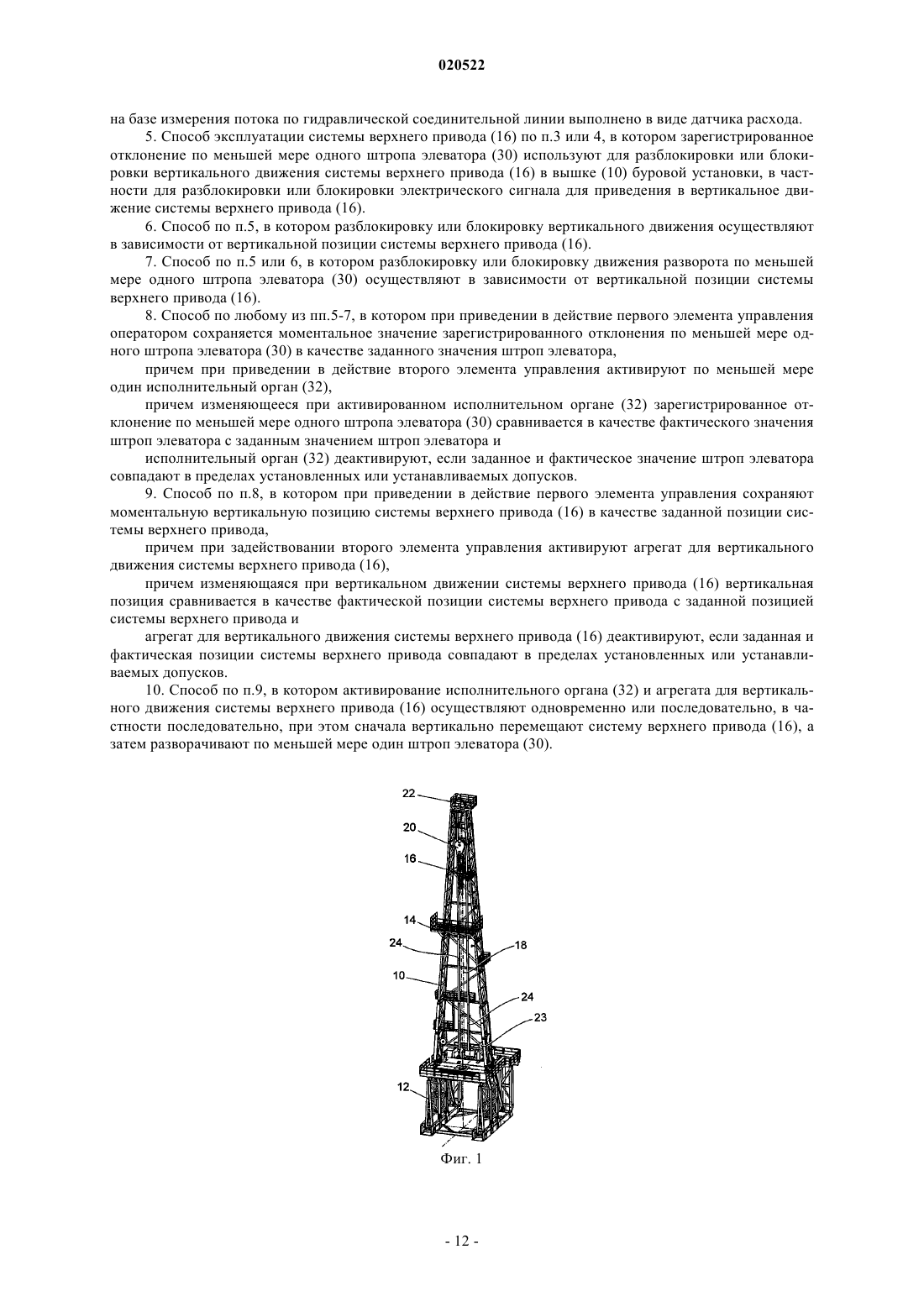
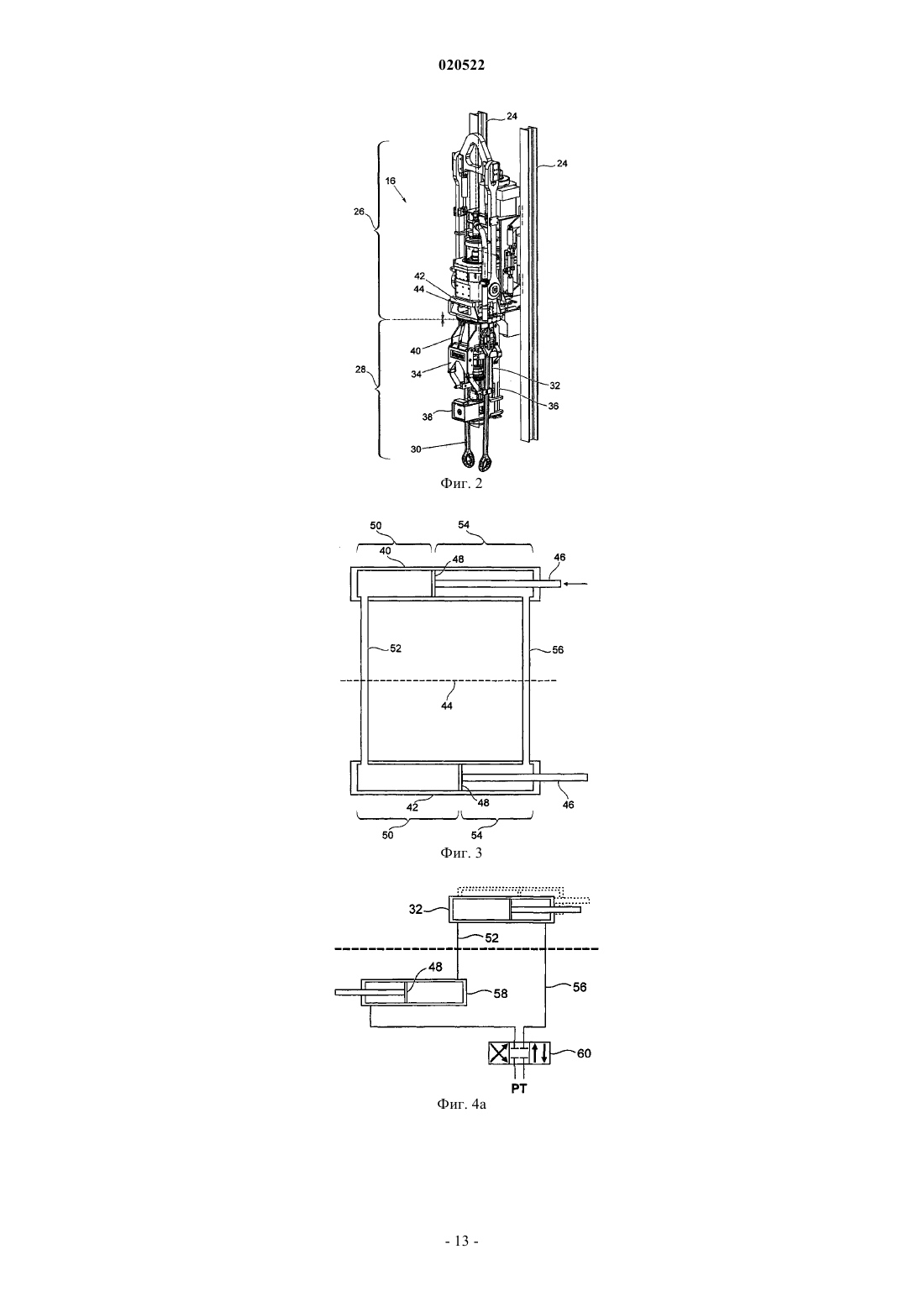
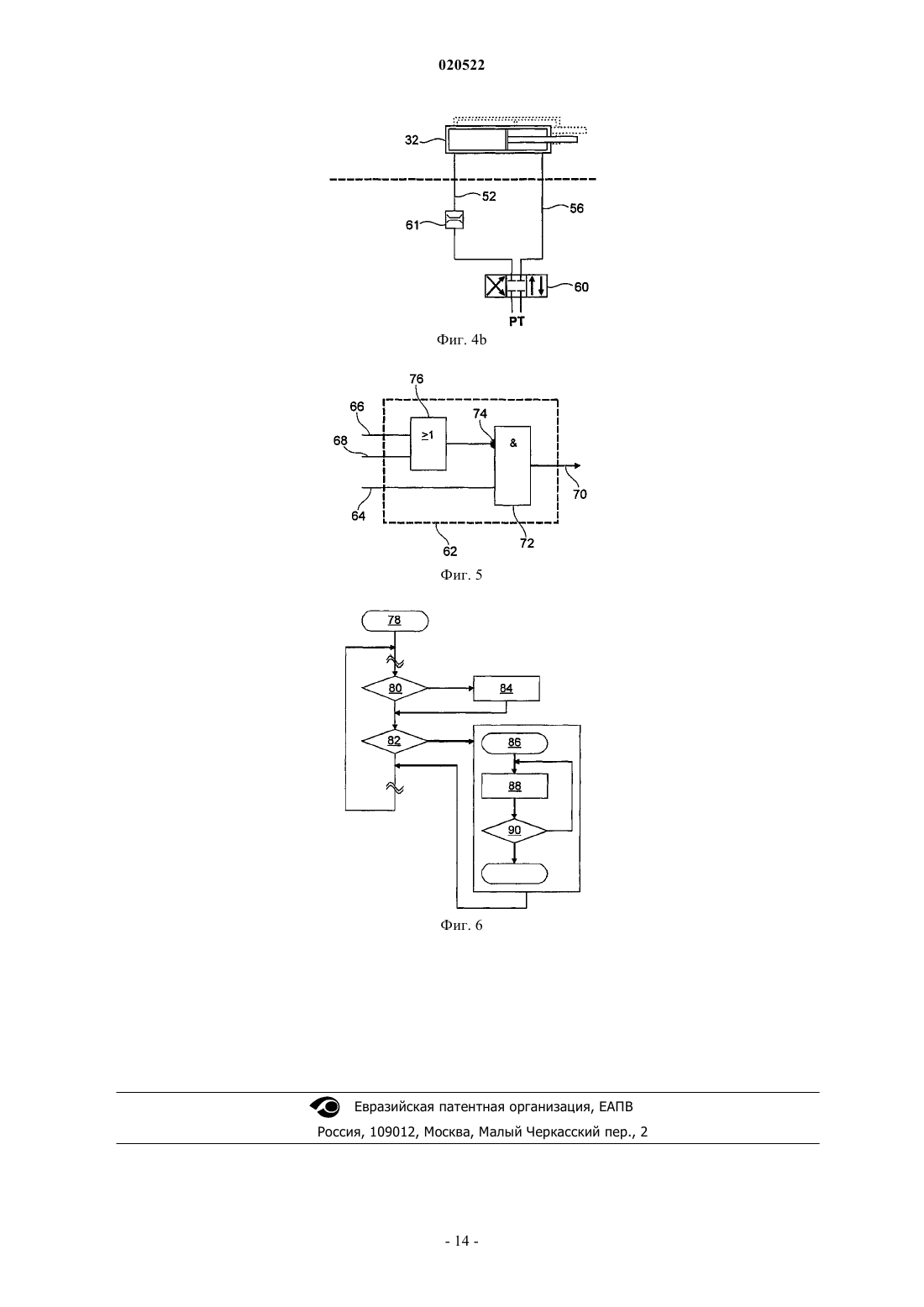
МАНИПУЛЯТОР ДЛЯ БУРИЛЬНОЙ КОЛОННЫ, В ЧАСТНОСТИ ТРУБНОЙ МАНИПУЛЯТОР ИЛИ СИСТЕМА ВЕРХНЕГО ПРИВОДА С ТРУБНЫМ МАНИПУЛЯТОРОМ, И СПОСОБ ИХ ЭКСПЛУАТАЦИИ Изобретение относится к манипулятору для бурильной колонны (18) и так называемой системе верхнего привода (16), в которую входит указанный манипулятор в качестве так называемого трубного манипулятора, со средствами для регистрации позиции штропа элеватора (30), входящего в состав манипулятора/трубного манипулятора, и передачи соответственной позиционной информации, причем позиционная информация передается от трубного манипулятора, например,к системе верхнего привода (16) и преобразуется в электрический сигнал для опознавания и предотвращения возможных критичных ситуаций по причине положения/отклонения штропа элеватора (30).(71)(73) Заявитель и патентовладелец: БЕНТЕК ГМБХ ДРИЛЛИНГ УНД ОЙЛФИЛД СИСТЕМЗ (DE) Изобретение относится к манипулятору для бурильной колонны при бурении глубоких скважин,например для разведки залежей нефти и природного газа. Для такого манипулятора в профессиональной терминологии утвердилось наименование "трубной манипулятор" и поэтому в нижеследующем тексте будет использоваться термин "трубной манипулятор" как синоним выражения "манипулятор для бурильной колонны". Трубной манипулятор является составной частью так называемой системы верхнего привода, т.е. вертикально движущегося в вышке буровой установки приводного узла, который посредством находящегося в его составе приводного агрегата, обычно двигателя, приводит бурильную колонну во вращение для осуществления процесса бурения. Система верхнего привода состоит из неподвижной и вращающейся части. Неподвижная часть содержит приводной агрегат, и через эту неподвижную часть проводится электрическая энергия и подключение для приема или подачи электрических сигналов к управлению и/или контролю системы верхнего привода. Вращающаяся часть представляет собой трубной манипулятор, и агрегаты трубного манипулятора снабжаются энергией через гидравлический вращающийся коллектор между неподвижной и вращающейся частями системы верхнего привода, благодаря чему гидравлические исполнительные органы, в частности рабочие цилиндры и т.п., нагружаются гидравлической жидкостью под давлением, например, для приведения в движение так называемых штроп элеватора или активирования ключа для труб бурильной колонны, размещенного на так называемом кронштейне для компенсации реактивного момента. Специально для элеваторных штроп трубного манипулятора предусмотрена возможность поворотных движений, поскольку к штропам (обычно два) закреплен на концах так называемый элеватор бурильных труб для снятия элементов бурильной колонны с базы их хранения и подачу снятого элемента бурильной колонны к ключу на конце кронштейна для компенсации реактивного момента. Определенное количество элементов бурильной колонны обычно хранится в вертикальном положении рядом с вышкой буровой установки или на ней и с этой целью предусмотрена так называемая площадка верхового рабочего, находящаяся на вышке в области верхних концов хранящихся элементов бурильной колонны. До сего времени снятие элементов бурильной колонны из позиции их хранения или наоборот - установка элементов бурильной колонны в позицию хранения - осуществлялась методом ручного управления. Для этого система верхнего привода перемещается в вышке в соответственную вертикальную позицию, позволяющую снятие элементов бурильной колонны или установку их на хранение. Как только система верхнего привода будет находиться в этой позиции, то один или каждый штроп элеватора разворачивается и элемент бурильной колонны снимается или устанавливается элеватором. Недостатком прежних вариантов исполнений однако является то, что выполнение необходимых управляющих операций для подготовки и завершения таких манипуляционных процедур оставалось по сути дела вопросом внимательности обслуживающего персонала. Если, например, после установки элемента бурильной колонны на трубную базу штропы элеватора останутся развернутыми, то перемещение системы верхнего привода вниз станет, как правило, невыполнимо без опасения, что концы штроп элеватора могут задеть площадку верхового рабочего или другие элементы в вышке или на вышке буровой установки. Особенно критичным является то, что в результате этого на вышке буровой установки или ее частях возможны повреждения, которые в худшем случае могут привести к травматизму людей, например в случае повреждения площадки верхового рабочего, на которой, как правило, находится обслуживающий персонал для приемки или укладки элементов бурильной колонны. Задача изобретения состоит в том, чтобы создать трубной манипулятор, т.е. манипулятор для бурильной колонны, систему верхнего привода с таким трубным манипулятором и способ эксплуатации или применения этих узлов, при котором можно предотвратить названные выше недостатки, и, в частности, в том, чтобы создать соответствующие устройства и способы, с помощью которых станет возможным контроль позиции трубного манипулятора или для трубного манипулятора и/или для системы верхнего привода с трубным манипулятором. Согласно изобретению эта задача решается путем применения устройств, охарактеризованных признаками пп.1 и 3 формулы изобретения. Что касается трубного манипулятора, как манипулятора для бурильной колонны, т.е. как часть системы верхнего привода, как минимум с одним штропом элеватора,поворачивающимся под воздействием как минимум одного исполнительного органа, причем штроп или штропы удерживают элеватор бурильных труб или аналогичный адаптер для захвата элементов бурильной колонны или т.п., то для этой цели предусмотрены средства для регистрации позиции как минимум одного штропа элеватора и средства для передачи соответствующей позиционной информации. Что касается системы верхнего привода, которая кроме неподвижного приводного агрегата содержит манипулятор согласно изобретению в виде вращающегося трубного манипулятора, то по сторонам трубного манипулятора предусмотрены средства для регистрации позиции как минимум одного штропа элеватора и средства для передачи соответствующей позиционной информации, а по сторонам неподвижной части системы верхнего привода с лучшими возможностями для приема и подачи сигналов, в частности электрических сигналов, для управления и/или контроля системы верхнего привода предусмотрены средства для приема позиционной информации и средства для выработки передаваемого сигнала на базе позиционной информации. Для упрощения дальнейшего изложения вместо выражения "как минимум один штроп элеватора" ниже и в последующем описании примеров исполнения используется выражение "штропы элеватора",причем при этом делается ссылка на принятый в настоящее время вид исполнения с двумя штропами. Однако выражение "штропы элеватора" в каждом случае означает "как минимум один или несколько, в частности два штропа элеватора", а также "штроп элеватора, каждый штроп элеватора или как минимум один из штропов элеватора". В одном варианте исполнения системы верхнего привода средством для регистрации позиции штроп элеватора является первый измерительный цилиндр. В таком случае передача позиционной информации, зарегистрированной первым измерительным цилиндром, осуществляется от вращающейся части системы верхнего привода, следовательно, от манипулятора (трубного манипулятора) к неподвижной части системы верхнего привода, т.е. через точку вращения, находящуюся между обеими частями системы верхнего привода. Преимущество изобретения состоит в том, что с получением информации о позиции штроп элеватора (позиционная информация) становится возможной выработка сигнала, с помощью которого опознается, возможно ли безопасное вертикальное движение системы верхнего привода или вращательное движение трубного манипулятора. В таком случае автоматические, а также задействованные вручную или задействуемые двигательные процессы в вышке буровой установки можно связать с этой информацией,чтобы надежно предотвратить опасные ситуации. Предметом зависимых пунктов формулы изобретения являются предпочтительные виды осуществления изобретения. Используемые при этом обратные ссылки указывают на подробное изложение предмета основного пункта формулы изобретения с помощью признаков каждого подпункта формулы; однако это не следует понимать как отказ от получения независимой защиты по предмету комбинаций признаков подпунктов, на которые делаются ссылки. В дальнейшем, с учетом интерпретации пунктов формулы при более подробной конкретизации какого-либо признака в нижестоящем пункте формулы нужно исходить из того, что ограничение такого рода не имеется в предшествующих пунктах формулы. Трубной манипулятор, как правило, содержит так называемый рычаг уклона, поворотное движение которого передается на штропы элеватора; т.е. штропы элеватора могут быть развернуты рычагом уклона, находящимся под воздействием одного или каждого исполнительного органа. В соответствии с этим предусмотрено, что регистрация позиции штроп элеватора осуществляется на рычаге уклона, потому что отклонение его, во-первых, пропорционально отклонению штроп элеватора и, во-вторых, при регистрации только одной позиции имеется позиционная информация, например, для двух штроп элеватора, входящих в состав трубного манипулятора. Для манипулятора, т.е. трубного манипулятора, предусмотрено, что он функционирует в системе верхнего привода (с неподвижной и вращающейся частями) как вращающаяся часть, хотя под словом"неподвижный" понимается, что данная часть системы верхнего привода устойчива к вращению, а вертикальная подвижность, например, при опускании или поднимании бурильных труб всегда возможна и необходима. Позиционная информация может выражаться в самой различной форме. Сюда относятся электрические сигналы, передаваемые беспроводным способом или по проводам, сигналы в электромагнитной форме, а также, например, световые сигналы в видимом или невидимом диапазоне и т.п., которые тоже могут передаваться беспроводным способом или по проводам, акустические сигналы или такие сигналы,которые передаются гидравлическим или пневматическим путем или аналогичным способом, в том числе комбинации из всех вышеприведенных. Если позиционная информация представляет собой электрический сигнал, то предпочтительно применяется передача сигналов от вращающейся части к неподвижной части системы верхнего привода через схему контактных колец. Альтернативно или дополнительно позиционная информация может передаваться беспроводным способом от передатчика на вращающейся части системы верхнего привода к приемнику, в частности к приемнику на неподвижной части системы верхнего привода. Для беспроводной передачи можно применять, в частности, радиосигналы, инфракрасные сигналы, а также электромагнитную передачу сигналов с использованием общепринятых протоколов, например Bluetooth, GSM и так далее. При применении комбинации передатчик/приемник для беспроводной передачи позиционной информации предпочтительным является местный источник энергоснабжения. При беспроводной передаче позиционной информации нет необходимости в передаче посредством контактных колец через точку вращения между обеими частями системы верхнего привода. В таком случае будет выгодно, если для необходимого энергопитания передатчика схема контактных колец не потребуется. Следовательно, можно предусмотреть подключение передатчика к местному источнику энергии, например к батарейке или адекватному устройству. Чтобы можно было надежно опознать и контролировать возможный сбой местного энергоснабжения, передача данных между передатчиком и приемником содержит не только позиционную информацию, но и так называемый признак жизни, который поставляется передатчиком к установленным или устанавливаемым срокам или циклично, и при регулярном приеме приемник соответственно регистрирует и передает сигнал о хорошо функционирующей связи. Если признак жизни отсутствует, то на систему управления установки поступает сообщение о неполадке или т.п., которое, с одной стороны, обращает внимание персонала на необходимость проведения работ по техобслуживанию и, с другой стороны, предупреждает о нарушении безопасности установ-2 020522 ки, т.е. указывает на возможно максимально развернутые штропы элеватора, так как при прерванной связи позиционной информации более не имеется и во избежание материального ущерба и травматизма персонала следует соответственно исходить из возможно критичного уклонения штроп элеватора. Другими возможностями местного энергоснабжения является применение элементов солнечной батареи или выработка энергии, необходимой для работы передатчика, в процессе отклонения штроп элеватора. В варианте исполнения трубного манипулятора/системы верхнего привода с первым измерительным цилиндром предпочтительным является то, что первый измерительный цилиндр представляет собой гидравлический измерительный цилиндр и что позиционная информация может передаваться через существующий гидравлический вращающийся коллектор между неподвижной и вращающейся частью системы верхнего привода, причем для передачи позиционной информации используется один или несколько свободных, так называемых портов гидравлического вращающегося коллектора. Такая гидравлическая передача позиционной информации является предпочтительной уже потому, что на применение в буровой установке распространяются специальные условия, особенно на предмет обеспечения взрывобезопасности. При электрической передаче сигналов искрообразование полностью исключить невозможно,поэтому во взрывоопасных зонах можно использовать только специальные, так называемые взрывозащищенные приборы, которые по сравнению с соответствующими обычными приборами зачастую во много раз дороже. При гидравлической передаче сигналов искрообразование не является предметом опасений. Следовательно, гидравлическая передача сигналов не критична даже для взрывоопасных зон и не требует применения дорогих специальных приборов. При гидравлической передаче сигналов предпочтительным является то, что на неподвижной части системы верхнего привода предусмотрен второй измерительный цилиндр для приема позиционной информации от первого измерительного цилиндра. В таком случае на основании соответствующей позиции второго измерительного цилиндра имеется возможность, например, с помощью системы измерения пути регистрировать позицию, например, подвижного поршня во втором измерительном цилиндре и вырабатывать электрический сигнал, представляющий собой величину для полученной в виде позиции (отклонения) штроп элеватора позиционной информации. Альтернативой системы измерения пути или аналогичной системы являются также средства для выработки электрического сигнала на базе измерения потока, проходящего по соединительной линии между первым и вторым измерительными цилиндрами. Особо предпочтительным является то, что первый и второй измерительные цилиндры соединены двумя гидравлическими линиями, т.е. от стороны днища первого измерительного цилиндра до стороны днища второго измерительного цилиндра и от стороны штока первого измерительного цилиндра до стороны штока второго измерительного цилиндра. В таком случае, возможные помехи передачи позиционной информации по сравнению с чисто однолинейной передачей, т.е. при соединении, например, только между обеими днищевыми сторонами, могут распознаваться и в отдельных случаях даже непосредственно компенсироваться. То есть позиционная информация поступает на второй измерительный цилиндр значительно более надежно. Для средств выработки электрического сигнала на базе измерения потока по гидравлической соединительной линии между первым и вторым измерительными цилиндрами следует также принять во внимание использование двухлинейной передачи расхода в каждой соединительной линии, причем в таком случае выработка электрического сигнала тоже должна быть двухлинейной. Для двухлинейной генерации электрического сигнала с помощью системы измерения пути можно использовать цилиндр со штоком со стороны днища и со стороны штока, причем для каждого штока соответственно устанавливается своя система измерения пути. Выработка электрического сигнала на базе измерения потока по гидравлической соединительной линии от первого измерительного цилиндра не требует в обязательном порядке установку второго измерительного цилиндра с поршнем и тому подобного, так как вместо второго измерительного цилиндра может также использоваться уравнительная емкость. Альтернативный предпочтительный вариант исполнения средств для регистрации позиции штроп элеватора на трубном манипуляторе и передачи надлежащей позиционной информации заключается для системы верхнего привода, выполняющей манипуляции с элементами бурильной колонны и состоящей из неподвижной и вращающейся части, т.е. трубного манипулятора, причем вращающаяся часть содержит штропы элеватора, поворачиваемые под воздействием как минимум одного исполнительного органа,в том, что один или каждый исполнительный орган, выступающий в качестве приемного элемента, является гидравлическим цилиндром, что один или каждый выступающий в качестве приемного элемента гидравлический цилиндр задействуется или задействуются непосредственно или опосредственно от одного или нескольких выступающих в качестве подающих элементов гидравлических цилиндров, причем для регистрации позиции штроп элеватора и передачи соответствующей позиционной информации предусмотрены средства для выработки электрического сигнала на базе соответствующей позиции как минимум одного подающего элемента и/или на базе измерения потока по гидравлической соединительной линии между подающим и приемным элементом, т.е. как минимум между одним подающим и одним приемным элементом, или по гидравлической соединительной линии к приемному элементу. Это альтернативное решение регистрации позиции реализуется в диапазоне высокого или рабочего давления. А именно поток, например в гидравлической соединительной линии, определяется в элементе, находящимся под рабочим давлением, необходимым для разворота штроп элеватора. Напротив, при применении первого измерительного цилиндра и возможно второго измерительного цилиндра требуются по сравнению с этим рабочим давлением значительно более низкие уровни давления, которые по сравнению с рабочим давлением практически можно назвать "безнапорными", поэтому к первому и/или второму измерительному цилиндру исоединениям между ними предъявляются соответственно более низкие требования. Альтернативный вариант исполнения, у которого регистрация позиции осуществляется с учетом находящихся под рабочим давлением компонентов, приводит в отдельных случаях к более высоким требованиям к применяемой сенсорике, однако в этом случае можно отказаться от таких дополнительных компонентов, как первый и возможно второй измерительный цилиндр, и от соединения между ними, т.е. оба варианта, каждый по своему, отличаются значительными преимуществами. В качестве средства для получения электрического сигнала на базе соответствующей позиции второго измерительного цилиндра или соответственной позиции датчика предпочтительно используется один конечный выключатель или пара конечных выключателей. Одного конечного выключателя достаточно для поставки позиционной информации о том, что штропы или штроп элеватора имеют, по меньшей мере, такое отклонение, при котором возможен нежелательный контакт с частями в вышке или на вышке буровой установки. С помощью пары конечных выключателей можно регистрировать по меньшей мере две позиции по отклонению штроп элеватора, например позицию, в которой штропы элеватора свисают с трубного манипулятора вертикально или практически вертикально и тем самым не создают опасности соударения с частями в вышке или на вышке, и вторую позицию, в которой начинается эта"опасная зона". С помощью дополнительных конечных выключателей можно также определить возможное максимальное отклонение штроп элеватора. Хотя здесь речь идет об одном конечном выключателе или одной паре конечных выключателей для штроп элеватора, которые, исходя из практически вертикальной позиции покоя, могут разворачиваться как по часовой стрелке, так и против часовой стрелки, предусмотрено два конечных выключателя на каждое направление движения для опознавания захода в возможно опасную зону и по обстоятельствам два дополнительных конечных выключателя для опознавания максимального отклонения в каждое направление движения. Также и для опознавания позиции покоя может быть предусмотрен конечный выключатель, который преимущественно опознает незначительные отклонения от позиции покоя еще как позицию покоя, или два конечных выключателя, которые срабатывают при незначительных отклонениях, что позволяет сделать вывод, что при незанятости ни одного из этих конечных выключателей и надлежащей предшествующей последовательности занятости других конечных выключателей штропы элеватора находятся в области, определенной этими обоими конечными выключателями как позиция покоя. Альтернативно или дополнительно к регистрации отдельных позиций штроп элеватора можно использовать систему измерения пути в качестве средства для выработки электрического сигнала на базе соответственной позиции второго измерительного цилиндра или подающего элемента. Система измерения пути поставляет аналоговый сигнал в качестве величины для позиции штроп элеватора, что является много точнее, чем получение электрического сигнала с помощью одного или нескольких конечных выключателей. Следующей альтернативой для выработки электрического сигнала можно считать датчик расхода,который контролирует и, например, интегрирует расход по гидравлической соединительной линии между подающим и приемным элементом. То есть поставленный датчиком расхода сигнал, как и электрический сигнал, полученный на базе измерения потока по гидравлической соединительной линии между первым и вторым измерительным цилиндром, является аналоговым сигналом, служащим величиной для позиции штроп элеватора. Общим у всех вышеназванных конфигураций и вариантов исполнения является, что позиционная информация передается - (жидкостным) массовым потоком, электрическим или электромагнитным способом и при этом беспроволочным путем или по проводам - через точку вращения, находящуюся между неподвижной и вращающейся частями системы верхнего привода. Вышеназванная задача также решается способом эксплуатации системы верхнего привода, как описано здесь и ниже, посредством того, что зарегистрированная позиция штроп элеватора используется для разблокировки или блокировки вертикального движения системы верхнего привода в вышке буровой установки, в частности, для разблокировки или блокировки электрического сигнала для задействования вертикального движения системы верхнего привода. Согласно этому аспекту изобретения зарегистрированная позиция используется для логической связки сигналов, которая может привести к вертикальному движению системы верхнего привода. Такой сигнал может появляться в ручном, наладочном или автоматическом режиме, и в любой ситуации нужно обеспечить, чтобы вертикальное движение системы верхнего привода было невозможно, если в связи с позицией штроп элеватора возможен нежелательный контакт с частями в вышке или на вышке. Особо предпочтительным является то, что разблокировка или блокировка вертикального движения осуществляется в зависимости от вертикальной позиции системы верхнего привода. Этот аспект изобретения учитывает, что определенные вертикальные позиции или зоны этих позиций системы верхнего привода являются некритичными для вертикального движения даже при развернутых рычагах элеватора,а для других позиций или зон позиций возможность создания системы контроля согласно цели изобретения является преимуществом. Это учитывается, когда разблокировка или блокировка вертикального движения осуществляется в зависимости от вертикальной позиции системы верхнего привода. Дополнительно или альтернативно предпочтительным является то, что разблокировка или блокировка поворотного движения штроп элеватора выполняется в зависимости от вертикальной позиции системы верхнего привода. Этим можно обеспечить то, что в вертикальной позиции системы верхнего привода, особенно подверженной опасности соударений, разворот рычагов элеватора невозможен или только ограниченно возможен, или, по меньшей мере, возможен только при развороте их в направлении позиции покоя. Особо предпочтительный вариант исполнения комбинирует поочередные блокировки и разблокировки штроп элеватора и системы верхнего привода. Для полной вертикальной подвижности системы верхнего привода можно для каждой вертикальной позиции или для определенных зон вертикальных позиций задать максимальное значение поворота рычагов элеватора. В результате этого вокруг зоны движения системы верхнего привода создается воображаемая огибающая поверхность ("envelope"), до которой возможен максимальный разворот рычагов элеватора. С помощью огибающей поверхности или общего количества отдельных опорных точек, предусмотренных для электронной обработки огибающей поверхности, можно обеспечить активирование штроп элеватора и системы верхнего привода с отсутствием соударений. Если в вертикальной позиции системы верхнего привода штропы элеватора разворачиваются только до такой степени, что огибающая кривая не достигается, то дальнейший разворот штроп элеватора и/или вертикальное движение системы верхнего привода будет возможен. Если же при отклонении штроп элеватора создается задевание огибающей кривой, то как дальнейший разворот штроп элеватора, так и вертикальное движение системы верхнего привода будет недопустимо. Единственно допустимым движением является перемещение штроп элеватора в направление позиции покоя. После того как опасности задевания огибающей кривой не будет существовать, вертикальное движение системы верхнего привода будет снова возможно. До сего времени имелось описание огибающей кривой, то есть электронно обрабатываемого аналога такой огибающей кривой, для получения условий отключения определенных двигательных процессов. Помимо этого огибающую кривую можно также использовать для получения информации о надежных промежуточных позициях при совместном процессе движения, то есть вертикального движения системы верхнего привода и одновременного поворачивания рычагов элеватора. Если при совместном процессе движения, исходя от позиции системы верхнего привода, например, выше площадки верхового рабочего,нужно провести наезд на позицию на ноге вышки и на этой позиции штропы элеватора должны быть максимально развернуты, то при движении системы верхнего привода вниз с помощью огибающей кривой определяется максимально допустимое значение для отклонения штроп элеватора, и штропы элеватора соразмерно разворачиваются во время движения системы верхнего привода. В таком случае концы штроп элеватора как бы "скользят" вдоль воображаемой огибающей кривой и с достижением целевой позиции системы верхнего привода штропы элеватора также достигают свою целевую позицию или, по меньшей мере, почти достигают ее. Особенно предпочтительным в способе эксплуатации системы верхнего привода, как описано здесь и ниже, является то, что при задействовании оператором первого элемента управления сохраняется моментальное значение учтенной позиции штроп элеватора в качестве заданного значения штроп элеватора, причем при задействовании второго элемента управления активируется как минимум один исполнительный орган для разворота штроп элеватора и при активированном исполнительном органе зарегистрированная, изменяющаяся позиция штроп элеватора учитывается в качестве фактического значения штроп элеватора и сравнивается с заданным значением, причем исполнительный орган для разворота штроп элеватора деактивируется, если заданное и фактическое значение штроп элеватора совпадают в пределах установленных или устанавливаемых допусков. У этого варианта исполнения изобретения с задействованием первого элемента управления или также при первом задействовании элемента управления в процессе управления регистрируется моментальная позиция штропа элеватора для проводимого позже наезда ("обучения"). Проводимый позже наезд на сохраненную таким образом позицию развернутого штропа элеватора будет возможен на базе регистрации позиции штропа элеватора, предусмотренной сначала с целью предотвращения опасности. То есть если согласно этому аспекту изобретения наезд на сохраненную позицию штропа элеватора нужно выполнить еще раз позже, то путем задействования второго элемента управления или второго задействования элемента управления в процессе управления сначала активируется исполнительный орган, предусмотренный для разворота штропа элеватора, что приводит к развороту штроп элеватора. Такой процесс разворачивания можно контролировать на базе имеющейся теперь позиционной информации и сравнивать сохраненное значение как заданное значение штроп элеватора с соответственным моментальным значением (фактическое значение штроп элеватора) уже известным видом и способом. В рамках такого непрерывного сравнения происходит деактивация исполнительного органа, т.е. окончание разворотного движения, если заданное и фактическое значение штроп элеватора совпадают в пределах установленных или устанавливаемых допусков. Вместо только что описанного пропорционального регулирования для достижения сохраненной позиции штроп элеватора можно также использовать любую иную пригодную форму регулирования (например: PI, PID и т.д.), чтобы таким образом обеспечить при наезде еще более лучшую точность воспроизведения сохраненной позиции штроп элеватора. Кроме того, предпочтительным является, что при задействовании первого элемента управления(или при первом задействовании элемента управления) сохраняется также и моментальная вертикальная позиция системы верхнего привода в качестве заданной позиции системы верхнего привода, что при задействовании второго элемента управления (или при втором задействовании элемента управления) активируется также агрегат для вертикального движения системы верхнего привода, причем изменяющаяся при вертикальном движении системы верхнего привода вертикальная позиция сравнивается в качестве фактической позиции системы верхнего привода с заданной позицией системы верхнего привода, причем агрегат для вертикального движения системы верхнего привода деактивируется, если заданная и фактическая позиция системы верхнего привода совпадают в пределах установленных или устанавливаемых допусков. Этот аспект изобретения представляет собой расширенную возможность для наезда сохраненных позиций в связи с разворотом штроп элеватора также и для самой системы верхнего привода, так как за счет соответственных обслуживающих операций можно провести объединенный или комбинированный двигательный процесс, который значительно облегчает выполнение повторяющихся задач для обслуживающего персонала. Кроме того, предпочтительным для объединенного или комбинированного двигательного процесса разворота штроп элеватора и спуска и/или подъема системы верхнего привода является то, что активирование агрегата для вертикального движения системы верхнего привода и исполнительного органа для разворота штроп элеватора осуществляется одновременно или последовательно, в частности в такой последовательности, что сначала проводится вертикальное движение системы верхнего привода, а затем поворотное движение штроп элеватора. Последовательность двигательных процессов, при которой сначала задействуется вертикальное движение системы верхнего привода, имеет то преимущество, что по окончании этого двигательного процесса система верхнего привода (как правило) находится в позиции,позволяющей разворот штроп элеватора. В таком случае можно отказаться от затратомкого координирования обоих двигательных процессов. Однако простая возможность координирования двигательных процессов состоит в том, что для вертикальной позиции системы верхнего привода установлены определенные зоны позиций и в программе управления с каждой такой зоной ассоциируется максимальное отклонение как минимум одного штропа элеватора, например приведенная выше огибающая кривая. Координированный двигательный процесс в таком случае может осуществляться так, что, например, при подъеме системы верхнего привода и одновременном развороте штроп элеватора в каждой достигнутой при подъеме системы верхнего привода зоне движения осуществляется разворот или дальнейший разворот штроп элеватора до достижения соответствующей максимальной позиции, установленной для этой зоны движения. Когда система верхнего привода достигнет в итоге свою заданную конечную позицию,то штропы элеватора будут уже развернуты на начальную величину и достижение заданной для штроп элеватора целевой позиции происходит соответственно быстрее. К позициям, на которые проводится наезд, относятся, в частности, позиция над так называемым шурфом для наращивания колонны для приема там элементов бурильной колонны, так называемая "перебуренная" позиция, в которой штропы элеватора развернуты в стороны, чтобы позволить максимальный спуск системы верхнего привода так, что будет возможен подъем находящейся в скважине бурильной трубы, и позиция на уровне площадки верхового рабочего, необходимая для снятия установленных там элементов бурильной колонны. Ниже подробно поясняется пример исполнения изобретения на чертежах. Аналогичные предметы или элементы имеют на всех фигурах одинаковые ссылочные позиции. Этот или каждый пример исполнения не следует понимать как ограничение изобретения. Напротив,в рамках данного изобретения возможны многочисленные разновидности и модификации, особенно такие варианты, элементы и комбинации, которые, например, в результате комбинирования или изменения отдельных признаков и/или элементов или технологических операций, изложенных в связи с основной или специальной частью описания, а также содержащихся в пунктах формулы и/или на чертеже, помогут специалисту сделать вывод для решения своей задачи. На чертежах представлено следующее: на фиг. 1 - вышка, как часть буровой установки, с надлежащим основанием и системой верхнего привода, движущейся в вышке;на фиг. 2 - система верхнего привода, детально; на фиг. 3 - взаимодействие между первым и вторым измерительными цилиндрами, предусмотренными на системе верхнего привода для регистрации позиции штропа элеватора; на фиг. 4 - альтернативный вариант исполнения для регистрации позиции штропа элеватора; на фиг. 5 - сеть для управления вертикальным движением системы верхнего привода с учетом зарегистрированной позиции штропа элеватора; на фиг. 6 - структурная схема для пояснения аспекта изобретения, согласно которому позиционная информация записывается с целью проведения позже наезда на основании имеющейся позиции. На фиг. 1 показана вышка 10, как часть буровой установки, с надлежащим основанием 12. На вышке 10 находится в общем-то уже известная так называемая площадка 14 верхового рабочего, причем имеющиеся на ней "пальцы" представляют собой металлические прутки или профили, предусмотренные для стоячей, т.е. вертикальной, установки хранящихся там элементов бурильной колонны. В вышке 10 размещена в общем-то известная своим видом и принципом действия так называемая система верхнего привода 16, предусмотренная при работе буровой установки для спуска или подъема бурильных труб 18(не изображено; только намечено штрихами) и для вращения колонны бурильных труб 18 с целью осуществления процесса бурения. Система верхнего привода 16 навешена на талевый блок 20. Талевый блок 20 и расположенный в зоне верхней секции вышки кронблок 22 функционируют вместе, как система подъемных блоков. С кронблока 22 сходит тяговый канат (не изображен) для вертикального движения системы верхнего привода 16 к какому-либо предусмотренному в зоне буровой установки агрегату, например к приводимой электродвигателем лебедке 23. Для выполнения вертикального движения система верхнего привода 16 удерживается на направляющих рельсах 24. Фиг. 2 представляет систему верхнего привода 16 по фиг. 1 с другими подробностями. Согласно этому изображению в систему верхнего привода 16 входит неподвижная часть 26 и вращающаяся часть 28. Неподвижная часть 26 содержит привод для движения вращающейся части 28, например, в виде двигателя. Неподвижная часть 26 системы верхнего привода 16 также называется приводным узлом и "неподвижный" означает, что речь идет о стойкой к вращению части системы верхнего привода 16, которая в целом имеет вертикальную подвижность по направляющим рельсам 24. Вращающаяся часть 28 системы верхнего привода 16 называется в профессиональной терминологии и также здесь трубным манипулятором и содержит как минимум один поворотный штроп элеватора 30 и как минимум один исполнительный орган 32 для осуществления процесса разворота одного или каждого штропа элеватора 30. В представленном варианте исполнения имеются два штропа элеватора 30 и по одному исполнительному органу 32 (виден только один) на каждый штроп элеватора 30. Применение разъясненного вначале выражения "штропы элеватора" с определенным объемом значений будет соответственно продолжено. В позиции покоя штропы элеватора 30 находятся в основном в вертикальном положении, то есть штропы 30 свисают вертикально вниз. По меньшей мере, в такой позиции вертикальное движение системы верхнего привода 16 по направляющим рельсам 24 в вышке 10 возможно, не подвергая при этом штропы элеватора 30 опасности соударения с частями в вышке 10 или на ней, например с площадкой 14 верхового рабочего (фиг. 1) или с одним из направляющих рельсов 24. В представленном варианте исполнения трубного манипулятора исполнительный орган 32 не воздействует непосредственно на штропы элеватора 30, а сначала приводит в действие так называемый рычаг уклона 34, который в свою очередь воздействует на штропы элеватора 30 так, что поворот рычага уклона 34, вызванный воздействием как минимум одного исполнительного органа 32, приводит к разворачиванию штроп элеватора 30. Исполнительный орган 32 также часто называется в профессиональной терминологии цилиндром уклона. Другими составными частями системы верхнего привода 16 или его трубного манипулятора, которые не имеют особого значения для изобретения, являются так называемый кронштейн для компенсации реактивного момента 36 и предусмотренный на его нижнем конце ключ 38 для бурильных труб. Для регистрации позиции штроп элеватора 30 и передачи надлежащей позиционной информации у изображенного варианта исполнения системы верхнего привода 16 предусмотрены первый и второй измерительные цилиндры 40, 42. Первый измерительный цилиндр 40 приводится в действие с каждым движением рычага уклона 34 и между первым и вторым измерительными цилиндрами 40, 42 имеется гидравлическое соединение такого рода, что задействование первого измерительного цилиндра 40 рычагом уклона 34 оказывает воздействие на позицию второго измерительного цилиндра 42, которое проведено через гидравлический вращающийся коллектор 44 между неподвижной частью 26 и вращающейся частью 28 системы верхнего привода 16. Через этот гидравлический вращающийся коллектор 44 от неподвижной части 26 системы верхнего привода 16 поступает также, например, и гидравлическая жидкость для разворота штроп элеватора 30 к одному или каждому предусмотренному для этого исполнительному органу 32. В гидравлическом вращающемся коллекторе 44 для каждого такого рода гидравлического соединения между обеими частями 26, 28 системы верхнего привода 16 предусмотрен в общемто известный так называемый порт, а для соединения между первым и вторым измерительными цилиндрами 40, 42 предусмотрен дополнительный порт (или порты) или применяется свободный до сего времени порт (или порты). На фиг. 3 показано в упрощенном схематичном изображении взаимодействие между первым и вторым измерительными цилиндрами 40, 42. Оба измерительных цилиндра 40, 42 представляют собой цилиндры, в частности гидравлические или пневматические цилиндры, с поршнем 48, направляемым штоком 46 уже известного вида. Первый измерительный цилиндр 40 задействуется рычагом уклона 34 при разворотном движении штроп элеватора 30. Это воздействие показано стрелкой на правой стороне штока 46 первого измерительного цилиндра 40. При движении поршня 48 в первом измерительном цилиндре находящаяся в нем среда вытесняется уже известным видом и образом и вытесненная среда поступает от стороны днища 50 к ответной стороне днища 50 второго измерительного цилиндра 42 так, что вызывает-7 020522 ся адекватное движение поршня 48 во втором измерительном цилиндре 42, соответствующее движению поршня 48 в первом измерительном цилиндре 40. С этой целью первый и второй измерительные цилиндры 40, 42 соединены линией 52, в частности гидравлической линией, и выполненное таким образом соединение содержит также гидравлический вращающийся коллектор 44, изображенный на фиг. 3 только в виде штриховой линии (ср. также с фиг. 2). В отличие от варианта исполнения по фиг. 3 гидравлическое соединение между первым и вторым измерительными цилиндрами 40, 42 также можно реализовать от стороны днища 50 первого измерительного цилиндра 40 до стороны штока 54 второго измерительного цилиндра 42 или от стороны штока 54 первого измерительного цилиндра 40 до стороны днища 50 второго измерительного цилиндра 42. Изображенная линия 52 является в этом отношении только одним из многих возможных, принципиально равноценных соединений. Фиг. 3 показывает также и особенно предпочтительный вариант исполнения(гидравлического) соединения между первым и вторым измерительными цилиндрами 40, 42, а именно двухлинейное соединение, которое помимо первой линии 52 содержит еще линию 56. Изображенная вторая линия 56 соединяет через гидравлический вращающийся коллектор 44 обе стороны штоков 54 первого и второго измерительных цилиндров 40, 42. Двухлинейное соединение (первая линия 52, вторая линия 56) обеспечивает, что оба поршня 48, соединенных, например, в гидравлическом контуре измерительных цилиндров 40, 42, при вызванном рычагом уклона 34 изменении позиции поршня 48 в первом измерительном цилиндре 40 нагружены как силой тяги, так и давлением таким образом, что возможно нарушенная передача позиционной информации по первой или второй линии 52, 56 поддерживается адекватной позиционной информацией по оставшейся линии 52, 56. Относящаяся к позиции штроп элеватора 30, передаваемая дальше позиционная информация является таким образом объемом предусмотренной в цилиндре среды (например, гидравлической жидкости),перемещаемым поршнем 48 первого измерительного цилиндра 40. Передача позиционной информации, а именно в виде объемного потока, может осуществляться через вращающийся коллектор 44 между неподвижной и вращающейся частью 26, 28 системы верхнего привода 16, потому что через вращающийся коллектор 44 осуществляется подвод, например, гидравлической жидкости для отклонения штроп элеватора 30 в уже известных системах верхнего привода. Объемный поток, полученный при проходе от первого измерительного цилиндра ко второму 40, 42, является в этой связи только дополнительным, проводимым через вращающийся коллектор 44 объемным потоком, который к тому же находится или может находиться под значительно меньшим давлением, чем давление, имеющееся у объемного потока, подводимого при задействовании одного или каждого исполнительного органа 32 для разворота штроп элеватора 30. Положение второго измерительного цилиндра 42 регистрируется неизображенным датчиком. В качестве датчика может быть предусмотрен один конечный выключатель или группа конечных выключателей, например пара конечных выключателей. Конечный выключатель может быть, например, установлен так, что регистрируется определенное отклонение второго измерительного цилиндра 42, причем выбранная с этой целью позиция этого конечного выключателя отвечает контролируемому отклонению штроп элеватора 30. В таком случае срабатывание этого конечного выключателя означает, что штропы элеватора 30, по меньшей мере, достигли заданного отклонения, а заданное отклонение может означать такое отклонение, при котором имеется опасность контакта штроп элеватора 30 с частями в вышке 10 или на ней. Особенно в том случае, если штропы элеватора 30 могут поворачиваться как по часовой стрелке, так и против часовой стрелки, следует предусмотреть два конечных выключателя такого рода,чтобы можно было контролировать достижение возможно критичной позиции отклонения в обоих направлениях движения. С помощью другого подхода можно дополнительно или альтернативно реализовать контроль позиции покоя штроп элеватора 30, причем каждый уход с позиции покоя можно принципиально расценивать как критичную ситуацию отклонения. Если один или несколько конечных выключателей можно рассматривать в отношении регистрации позиционной информации, поставленной первым измерительным цилиндром 40, как цифровой датчик или цифровые датчики, то вместо или дополнительно к ним для цифровой регистрации измерительных значений предпочтительна также установка аналогового датчика, например датчика регистрации пути(система измерения пути). Зарегистрированный путь представляет собой у изображенного на фиг. 3 варианта исполнения отклонение поршня 48 второго измерительного цилиндра 42, которое может регистрироваться или непосредственно на поршне 48, или на штоке 46. В качестве датчиков измерения пути могут применяться в общем-то уже известные датчики измерения пути, например инкрементный датчик, а в качестве основополагающего принципа измерения аналогового датчика можно использовать любой известный принцип измерения, например омический, индуктивный, емкостный, пьезоэлектрический и т.д. Следующий вариант исполнения регистрации позиции штроп элеватора 30 и передачи соответствующей позиционной информации изображен на фиг. 4 а и 4b. На фиг. 4 а и 4b показаны в верхней части соответственно один гидравлический цилиндр (или соответственно два) в качестве исполнительного органа 32 для разворачивания штроп элеватора 30. В варианте исполнения согласно фиг. 4 а этот или каждый исполнительный орган 32 функционирует в отношении направления потока гидравлической жидкости как приемный элемент и запитывается подающим элементом (подающим цилиндром) 58, находя-8 020522 щимся на вращающейся части 26 системы верхнего привода 16, то есть на другой стороне вращающегося коллектора 44. При этом движение разворота штроп элеватора 30 задействуется за счет того, что находящийся на входной стороне подающего элемента 58 клапан 60 (распределительный клапан) управляется так, что он пропускает гидравлическую жидкость от нагруженного давлением резервуара гидравлической жидкости или от гидравлического агрегата. В связи с потоком гидравлической жидкости, образовавшимся в результате управления клапана 60, в подающем элементе 58 создается движение, которое приводит к движению в приемном элементе, то есть в одном или в каждом исполнительном органе 32, и тем самым задействуется преднамеренное движение разворота штроп элеватора 30. В этом варианте для регистрации позиции штроп элеватора 30 имеется возможность регистрации поршня 48, находящегося в подающем элементе 58 и перемещаемого массовым потоком гидравлической жидкости. В изображенной конфигурации подающий элемент 58 находится в рабочей линии (линия 52; символ "Р" на клапане). Принципиально можно предусмотреть блок в виде подающего элемента 58 также и в линии выпуска воздуха или сточной линии (линия 56; символ "Т" на клапане) и там устройство регистрации позиции. Кроме того, можно также осуществлять регистрацию позиции описанным уже способом в обеих линиях 52,56, что снова позволит двухлинейную регистрацию позиции. На фиг. 4b показан вариант, в основном, отвечающий варианту исполнения по фиг. 4 а. Вместо подающего элемента 58 (фиг. 4 а) предусмотрен датчик расхода 61. Этот датчик устанавливается для измерения потока, проходящего через линию 52 между клапаном 60 и исполнительным органом 32 (приемный элемент). Дополнительно или альтернативно можно установить датчик расхода 61 также и в другую линию 56. Установка по одному датчику расхода 61 в обеих линиях 52, 56 сделает регистрацию позиции датчиками расхода 61 двухлинейной регистрацией позиции. Для измерения расхода, то есть для выработки отвечающему объемному потоку пропорционального сигнала, можно использовать любой расходомер или любой проточный датчик. Применение расходомеров или проточных датчиков можно также реализовать в варианте исполнения по фиг. 3, что возможно позволит отказаться от системы измерения пути. Преимущество вариантов по фиг. 4 а и 4b состоит в том, что дополнительные компоненты, как, например, первый и второй измерительные цилиндры 40, 42 (фиг. 3), не требуются. Однако у варианта по фиг. 4 измерение должно проводиться под высоким давлением, а у варианта по фиг. 3 степень сжатия в первом и во втором измерительных цилиндрах 40, 42 может быть ниже, в некоторых случаях даже на несколько порядков, чем для исполнительного органа 32 и его питания. У всех вариантов по фиг. 3 или 4 а, 4b двухлинейное исполнение регистрации позиции очевидно. Двухлинейное исполнение повышает надежность регистрации измерительных значений в вопросе надежного контроля, а также по возможности последовательно подключенного управления для отклонения штроп элеватора 30. Двухлинейное исполнение можно также дополнять и совершенствовать путем применения разновидной регистрации значений измерения. У варианта по фиг. 3 может использоваться, например, система измерения пути в качестве первого электрического датчика и датчик расхода в качестве второго разновидного электрического датчика. При такой конфигурации электрический сигнал на базе позиционной информации, поступившей от первого измерительного цилиндра 40 не только по двухлинейным соединениям (линии 52, 56), но и между обоими измерительными цилиндрами 40, 42, образуется не только двухлинейно, то есть двумя датчиками, но и разновидно двухлинейно, то есть посредством двух различных датчиков, отличающихся принципом измерения. Благодаря этому защита от ошибок при регистрации позиции штроп элеватора 30 еще раз значительно повышается. Аналогичную конфигурацию можно также реализовать и с другой сенсорикой для изображенного на фиг. 4 а и 4b варианта исполнения, например предусмотрев у варианта по фиг. 4 а в другой линии 56 датчик расхода 61 из варианта по фиг. 4b или наоборот. Идея, заложенная в суть изобретения, то есть регистрация позиции штроп элеватора 30 и передача соответственной позиционной информации, может осуществляться самым различным видом и способом с резервированием и/или разновидно. Вариант исполнения по фиг. 3 представляет собой на сторонах для регистрации позиционной информации резервированное исполнение, так как позиционная информация в качестве величины для отклонения штроп элеватора 30 поступает как со стороны днища 50, так и со стороны штока 54 первого измерительного цилиндра 40. Передача соответственной позиционной информации имеет резервированное исполнение, потому что для передачи позиционной информации предусмотрены первое и второе соединение (линия 52, 56) через гидравлический вращающийся коллектор 44 до второго измерительного цилиндра 42. В связи с тем, что второй измерительный цилиндр 42 соединен с первым измерительным цилиндром 40 как на стороне днища 50, так и на стороне поршня 54, то и получение позиционной информации от первого измерительного цилиндра 40 осуществляется с резервированием. В зависимости от вида и количества предусматриваемых средств для выработки электрического сигнала на базе соответственной позиции второго измерительного цилиндра 42 генерация электрического сигнала также осуществляется с резервированием или даже уже здесь разновидно. Исходя из этой общей схемы допустимы многочисленные изменения без отклонений от принципиальной сути изобретения. Так, например, дополнительно к компоновке по фиг. 3 или, например, вместо соединения обоих измерительных цилиндров 40, 42 на стороне штока может быть предусмотрен на соединении второй линии 56 с первым измерительным цилиндром 40 передатчик, который выдает электромагнитный сигнал в зависимости от положения первого измерительного цилиндра 40 (или позиции рычага уклона 34), и этот сигнал принимается на сторонах неподвижной части 26 системы верхнего привода 16 соответствующим приемником. Двухлинейность регистрации позиции штроп элеватора 30 и двухлинейная передача соответственной позиционной информации при этом сохраняется. Двухлинейность у такого варианта исполнения уже является не только резервированной, но и разновидной двухлинейностью, что в целом повышает надежность этого решения на предмет защиты от ошибок. К примеру, для электрической или электромагнитной регистрации позиции штроп элеватора 30 можно дополнительно или альтернативно применять самые различные принципы измерения и регистрации, например, с помощью фоточувствительных элементов, направленных от неподвижной части 26 системы верхнего привода 16 вертикально или практически вертикально вниз для "натягивания светового занавеса", который будет прерван при развернутых штропах элеватора 30 и на основании такого прерывания может быть выведена позиционная информация; то есть вызванная разворотом штроп элеватора 30 регистрация изменения электромагнитного поля под неподвижной частью 26 системы верхнего привода 16, причем для зарегистрированных показателей электромагнитного поля установлены или могут быть установлены предельные или пороговые значения, достижение или превышение которых привязано к определенным позициям разворота штроп элеватора 30, что позволит вывести позиционную информацию о положении штроп элеватора 30. Другая, не упомянутая здесь явно, но в общем-то известная сенсорика может быть также принята во внимание и каждая названная возможность регистрации позиции штроп элеватора 30 может быть предусмотрена в двойном или многоразовом исполнении для резервированной, двух- или многолинейной регистрации и передачи позиционной информации. Кроме того, каждая комбинация упомянутой сенсорики может быть предусмотрена для двух- или многолинейной резервированной, разновидной регистрации позициии передачи позиционной информации. На фиг. 5 показан пример сети 62 с логическими связями, как в программе управления для регулирования вертикального движения системы верхнего привода 16, применимой с учетом зарегистрированной позиции штроп элеватора 30. Сеть 62 имеет первый и второй вход 64, 66, по необходимости еще и третий вход 68 и один выход 70. На первом входе 64 в сеть 62 подается сигнал, с поступлением которого должно происходить активирование агрегата для вертикального движения системы верхнего привода 16. При настоящем уровне техники, то есть без учета зарегистрированной позиции штроп элеватора 30 при вертикальном движении системы верхнего привода 16, сеть 62 или аналогичная логическая связь не требуется, и первый вход 64 непосредственно перенаправляется как выход 70 для управления соответственного агрегата. В сети 62, напротив, предусматривается с помощью схемы И 72 логическая операция И для первого входа 64 и таким образом на выходе 70 сигнал образуется только тогда, когда на первом входе 64 сигнал имеется и позиция штроп элеватора 30 одновременно позволяет переключение первого входа 64 на выход 70. Для этого схема И 72 содержит помимо первого входа 64 отрицательный вход 74 и логическая операция И, реализованная схемой и 72, может быть выполнима только тогда, когда на отрицательном входе 74 сигнала не имеется, то есть сигнализация о критичной позиции штроп элеватора 30 не поступила. Принципиально для этого можно перенаправить второй вход 66 непосредственно на отрицательный вход 74 схемы И 72. На фиг. 5 показан вариант исполнения с резервированными электрическими сигналами по позиции штроп элеватора 30, которые подаются в схему ИЛИ 76 сети 62 на входы,представляющие собой второй и третий вход 66, 68. Во время работы схема ИЛИ 76 приводит к тому,что на ее выходе появляется сигнал, если на втором или на третьем входе 66, 68 сигнализируется критичная позиция штроп элеватора 30. Выход схемы ИЛИ 76 инвертируется в отрицательный вход 74, так что при минимум одном сигнализирующем критичную позицию входе 66, 68 реализованная схемой И 72 логическая операция является более невыполнимой и, соответственно, сигнал на выходе 70 подавляется. То есть при критичной позиции штроп элеватора 30 предусмотренный для вертикального движения системы верхнего привода 16 агрегат активировать больше невозможно. Схема ИЛИ 76 позволяет при резервированной или разновидной генерации электрических сигналов по позиционной информации штропа элеватора 30 отдельный учет обоих или нескольких сигналов (для дополнительных сигналов схема ИЛИ 76 получает дополнительные входы), так что даже только при одном критичном сигнале активирование вертикального движения системы верхнего привода 16 будет предотвращено. На фиг. 6 представлена структурная схема для пояснения аспекта изобретения, согласно которому позиционная информация записывается с целью проведения позже наезда на основании имеющейся позиции. С этой целью структурная схема на фиг. 6 представляет собой в очень упрощенном виде часть программы управления 78 для управления и/или контроля отдельных агрегатов в вышке 10 или на вышке 10 буровой установки. Программа управления 78, в основном, проводится в бесконечном цикле, и для пояснения названного аспекта изобретения изображены только два разветвленных блока 80, 82, причем с первым разветвленным блоком 80 проверяется, проводится ли, например, задействование первого элемента управления или первое задействование элемента управления в пределах управляющей операции. Если определенное таким образом условие выполнено, то при задействовании элемента управления, выполняется ветвление к первому функциональному блоку 84, который сохраняет соответственную позиционную информацию, например позиционную информацию по отклонению штроп элеватора 30. После этого выполняется ветвление обратно к циклу программы управления 78. С помощью второго разветвленного блока 82 проверяется, задействуется ли, например, второй элемент управления или элемент управления задействуется во второй раз в пределах управляющей операции. Если определенное таким образом условие выполнено, то выполняется ветвление к подпрограмме 86, с помощью которой во втором функциональном блоке 88 активируется, например, исполнительный орган 32 для разворота штроп элеватора 30. В последующем, третьем разветвленном блоке 90 изменяющаяся при активированном исполнительном органе 32 зарегистрированная позиция штроп элеватора 30 сравнивается как фактическое значение штроп элеватора с сохраненным первым функциональным блоком 84 заданным значением штроп элеватора. До тех пор пока не будет выполнено условие, установленное третьим разветвленным блоком 90, при исполнении программы осуществляется переход на один цикл назад к позиции перед вторым функциональным блоком 88. Исполнительный орган 32 деактивируется, когда условие будет выполнено, когда заданное и фактическое значение штроп элеватора будет совпадать в пределах установленных или устанавливаемых допусков и соответственно этому проводится выход из активного в остальном цикла. По завершении подпрограммы 86 заданная позиция штроп элеватора достигнута и осуществляется ветвление назад к бесконечному циклу программы управления 78. По принципу представленной на фиг. 6 структурной диаграммы можно также проводить "обучение" - то есть сохранение - вертикальной позиции системы верхнего привода 16 и ее будущий наезд. Для необходимого в этом отношении активирования агрегата с целью вертикального движения системы верхнего привода 16 (функциональный блок, соответствующий второму функциональному блоку 88) была учтена функциональность, реализованная в сети 62 по фиг. 5, благодаря чему при наезде заданной позиции системы верхнего привода всегда можно контролировать, позволяет ли моментальное отклонение штроп элеватора 30 вертикальное движение или дальнейшее вертикальное движение системы верхнего привода 16. Итак, изобретение можно представить следующим образом: показан манипулятор для бурильной колонны 18 и так называемая система верхнего привода 16, которая содержит этот манипулятор в качестве так называемого трубного манипулятора, со средствами для регистрации позиции штропа элеватора 30, входящего в состав манипулятора/трубного манипулятора, и передачи соответственной позиционной информации, причем эта информация передается от трубного манипулятора, например, к системе верхнего привода 16, и преобразуется в электрический сигнал для опознавания и предотвращения возможных критичных ситуаций по причине положения/отклонения штропа элеватора 30. Для передачи позиционной информации от трубного манипулятора предлагаются различные варианты. За счет комбинирования отдельных вариантов возникают двухлинейные решения, которые выгодны в отношении защиты от ошибок. Комбинирование различных вариантов приводит к двухлинейным разновидным решениям, надежность которых в вопросе защиты от ошибок еще выше. Двухлинейность и/или разновидность возможны также и при выработке электрических сигналов на базе переданной позиционной информации. Контроль позиции штроп элеватора 30, впервые ставший теперь возможным с получением информации о позиции штроп 30 трубного манипулятора, отвечает самым высоким требованиям к надежному исполнению. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Манипулятор для бурильной колонны по меньшей мере с одним штропом элеватора (30), выполненным с возможностью разворота посредством рычага уклона (34), приводимого в действие по меньшей мере одним исполнительным органом (32), отличающийся тем, что содержит средство для регистрации позиции по меньшей мере одного штропа элеватора (30) и передачи соответствующей информации об отклонении. 2. Манипулятор по п.1, который представляет собой манипулятор системы верхнего привода (16),состоящей из неподвижной и вращающейся частей (26, 28), как вращающаяся часть системы верхнего привода (16). 3. Система верхнего привода (16) для манипуляционных операций в бурильной колонне (18), содержащая неподвижную часть (26) и вращающуюся часть (28), причем вращающаяся часть (28) содержит по меньшей мере один штроп элеватора (30), выполненный с возможностью разворота посредством рычага уклона (34), приводимого в действие по меньшей мере одним исполнительным органом (32), отличающаяся тем, что один или каждый исполнительный орган (32) выполнен в виде гидравлического цилиндра, выполняющего функцию приемного элемента, при этом один или каждый гидравлический цилиндр, выполняющий функцию приемного элемента, задействован или задействованы одним или несколькими гидравлическими цилиндрами, выполняющими функцию подающих элементов (58), причем для регистрации отклонения по меньшей мере одного штропа элеватора (30) и передачи соответствующей информации об отклонении предусмотрено средство для выработки электрического сигнала на базе соответствующей позиции по меньшей мере одного подающего элемента (58) и/или на базе измерения потока по гидравлической соединительной линии между подающим элементом (58) и приемным элементом. 4. Система верхнего привода (16) по п.3, в которой средство для выработки электрического сигнала на базе измерения потока по гидравлической соединительной линии выполнено в виде датчика расхода. 5. Способ эксплуатации системы верхнего привода (16) по п.3 или 4, в котором зарегистрированное отклонение по меньшей мере одного штропа элеватора (30) используют для разблокировки или блокировки вертикального движения системы верхнего привода (16) в вышке (10) буровой установки, в частности для разблокировки или блокировки электрического сигнала для приведения в вертикальное движение системы верхнего привода (16). 6. Способ по п.5, в котором разблокировку или блокировку вертикального движения осуществляют в зависимости от вертикальной позиции системы верхнего привода (16). 7. Способ по п.5 или 6, в котором разблокировку или блокировку движения разворота по меньшей мере одного штропа элеватора (30) осуществляют в зависимости от вертикальной позиции системы верхнего привода (16). 8. Способ по любому из пп.5-7, в котором при приведении в действие первого элемента управления оператором сохраняется моментальное значение зарегистрированного отклонения по меньшей мере одного штропа элеватора (30) в качестве заданного значения штроп элеватора,причем при приведении в действие второго элемента управления активируют по меньшей мере один исполнительный орган (32),причем изменяющееся при активированном исполнительном органе (32) зарегистрированное отклонение по меньшей мере одного штропа элеватора (30) сравнивается в качестве фактического значения штроп элеватора с заданным значением штроп элеватора и исполнительный орган (32) деактивируют, если заданное и фактическое значение штроп элеватора совпадают в пределах установленных или устанавливаемых допусков. 9. Способ по п.8, в котором при приведении в действие первого элемента управления сохраняют моментальную вертикальную позицию системы верхнего привода (16) в качестве заданной позиции системы верхнего привода,причем при задействовании второго элемента управления активируют агрегат для вертикального движения системы верхнего привода (16),причем изменяющаяся при вертикальном движении системы верхнего привода (16) вертикальная позиция сравнивается в качестве фактической позиции системы верхнего привода с заданной позицией системы верхнего привода и агрегат для вертикального движения системы верхнего привода (16) деактивируют, если заданная и фактическая позиции системы верхнего привода совпадают в пределах установленных или устанавливаемых допусков. 10. Способ по п.9, в котором активирование исполнительного органа (32) и агрегата для вертикального движения системы верхнего привода (16) осуществляют одновременно или последовательно, в частности последовательно, при этом сначала вертикально перемещают систему верхнего привода (16), а затем разворачивают по меньшей мере один штроп элеватора (30).
МПК / Метки
МПК: E21B 19/06, E21B 19/08
Метки: система, манипулятором, трубным, способ, трубной, эксплуатации, верхнего, бурильной, привода, частности, колонны, манипулятор
Код ссылки
<a href="https://eas.patents.su/15-20522-manipulyator-dlya-burilnojj-kolonny-v-chastnosti-trubnojj-manipulyator-ili-sistema-verhnego-privoda-s-trubnym-manipulyatorom-i-sposob-ih-ekspluatacii.html" rel="bookmark" title="База патентов Евразийского Союза">Манипулятор для бурильной колонны, в частности трубной манипулятор или система верхнего привода с трубным манипулятором, и способ их эксплуатации</a>
Способ и устройство для определения моды движения бурильной колонны
Номер патента: 7498
Опубликовано: 27.10.2006
Автор: Хатчинсон Марк У.
МПК: E21B 47/024
Метки: движения, способ, определения, моды, бурильной, устройство, колонны
Формула / Реферат:
1. Способ определения моды движения бурильной колонны, в котором измеряют поперечное ускорение бурильной колонны; определяют поперечное положение бурильной колонны относительно времени, исходя из измерений ускорения; и определяют моду, исходя из указанного положения относительно времени. 2. Способ по п.1, отличающийся тем, что поперечное ускорение измеряют в направлениях, перпендикулярных друг другу и оси бурильной колонны. 3. Способ по п.1,...
Способ и устройство для определения деструктивного крутящего момента на оборудовании низа бурильной колонны
Номер патента: 8978
Опубликовано: 26.10.2007
Автор: Хатчинсон Марк У.
МПК: E21B 47/024
Метки: оборудовании, момента, колонны, определения, крутящего, устройство, бурильной, низа, деструктивного, способ
Формула / Реферат:
1. Способ определения деструктивного крутящего момента на оборудовании низа бурильной колонны, в котором измеряют параметр, связанный с угловым ускорением, по меньшей мере в одной точке вдоль бурильной колонны; сравнивают угловое ускорение, определенное по измеренному параметру, с выбранным пороговым значением, которое связано с моментом инерции выбранных компонентов бурильной колонны и максимальным крутящим моментом, прикладываемым по меньшей...
Способ освобождения прихваченной бурильной колонны в стволе скважины подземного пласта
Номер патента: 9821
Опубликовано: 28.04.2008
Авторы: Пейтел Арвинд Д., Стаматакис Эмануэль
МПК: E21B 31/00
Метки: способ, освобождения, стволе, колонны, подземного, прихваченной, пласта, бурильной, скважины
Формула / Реферат:
1. Способ освобождения прихваченной бурильной колонны в стволе скважины подземного пласта, в котором в скважину подают неводную промывочную жидкость с добавкой на неэмульсионной основе, эффективной для снижения давления в кольцевом пространстве, действующего на прихваченную бурильную колонну от фильтрационной корки промывочной жидкости или бурового раствора на стенках скважины, отличающийся тем, что состав добавки содержит общий растворитель,...
Подвеска бурильной колонны
Номер патента: 12662
Опубликовано: 30.12.2009
Авторы: Вест Грегори Дональд, Пфалерт Роджер
МПК: E21B 28/00, E21B 7/24
Метки: подвеска, бурильной, колонны
Формула / Реферат:
1. Вибрационное устройство, содержащее несущую конструкцию, вибрационную головку, способную избирательно действовать для создания выходной вибрационной мощности, и узел для приема выходной вибрационной мощности напрямую или не напрямую от вибрационной головки, при этом вибрационная головка и соединенный с ней напрямую или не напрямую узел для приема выходной вибрационной мощности установлены плавающим образом на несущей конструкции. 2....
Соединительный узел для расширяющейся трубной колонны, снабженной прорезями
Номер патента: 463
Опубликовано: 26.08.1999
Автор: Лохбек Вильхельмус Христианус Мария
МПК: E21B 17/08
Метки: соединительный, трубной, снабженной, расширяющейся, прорезями, узел, колонны
Формула / Реферат:
1. Соединительный узел для соединения между собой секций расширяющейся трубной колонны, содержащий внутреннюю часть и наружную часть, выполненные за одно целое с концами соответствующих трубных секций, отличающийся тем, что каждая часть имеет прорези и выполнена с возможностью коаксиального соединения с другой частью, допуская расширение соединенных частей в соответствии с расширением трубной колонны, трубная колонна снабжена прорезями, а...