Сельскохозяйственный распылительный агрегат и способ распыления фитосанитарной жидкости на участке, обрабатываемом при помощи такого агрегата
Формула / Реферат
1. Сельскохозяйственный агрегат (1) для распыления фитосанитарной жидкости на обрабатываемом участке, включающий в себя
средства (10, 11) перемещения агрегата (1) по поверхности (S) участка;
штангу (2) со средствами (22) для распыления фитосанитарной жидкости, содержащую по меньшей мере одно плечо (2а, 2b, 2с);
орган (3, 3a, 3b, 3c) наклона по меньшей мере одного из плеч (2а, 2b, 2с) по отношению к шасси (12) сельскохозяйственного агрегата (1);
орган (30) подъема/опускания штанги (2) вдоль первой оси (Z1), неподвижной относительно шасси (12) агрегата и вертикальной или по существу вертикальной, когда агрегат (1) опирается на плоскую горизонтальную поверхность (S), или относительно второй оси (Zg) того же направления, что и направление силы тяжести;
систему (38, 38а, 38b, 38с) ручного управления каждым органом (3, 3a, 3b, 3c) наклона и органом (30) подъема/опускания;
приемник (4), выполненный с возможностью связи с системой геолокализации; и
блок (5) управления,
при этом по меньшей мере одно из плеч (2а, 2b, 2с) штанги (2) оснащено по меньшей мере одним датчиком (6, 6а, 6b, 6c), при этом каждый датчик (6, 6а, 6b, 6c) измеряет расстояние (d) между поверхностью (S) обрабатываемого участка и этим датчиком (6, 6a, 6b, 6с) или, в случае необходимости, между растениями, посаженными на участке, и этим датчиком (6, 6а, 6b, 6c),
отличающийся тем, что по меньшей мере одно из плеч (2а, 2b, 2с) штанги (2) оснащено элементом (7, 7а, 7b, 7с, 70, 103) измерения величины (α, αa, αb, αc, α8, L103) наклона продольной оси (Х2, Х2а, Х2b, Х2с) плеча (2а, 2b, 2с) в плоскости (X1-Z1; X2a-Z1), перпендикулярной направлению движения (Y1) агрегата (1), при этом блок (5) управления
соединен с каждым датчиком (6, 6а, 6b, 6с), с приемником (4) и с измерительным элементом (7, 7а, 7b, 7с, 70, 103);
имеет устройство памяти (52) для сохранения данных, поступающих от каждого датчика (6, 6а, 6b, 6c), от приемника (4) и от каждого измерительного элемента (7, 7а, 7b, 7с, 70, 103); и
выполнен с возможностью управления каждым органом (3, 3a, 3b, 3c) наклона и органом (30) подъема/опускания в зависимости от величин (α, αa, αb, αc, α8, L103), сохраненных в устройстве памяти (52).
2. Агрегат (1) по п.1, отличающийся тем, что по меньшей мере один орган (3, 3a, 3b, 3c) наклона и/или орган (30) подъема/опускания содержит гидравлический или электрический домкрат.
3. Агрегат (1) по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере одно из плеч (2а, 2b, 2с) штанги (2) оборудовано двумя датчиками (6, 6a, 6b, 6c).
4. Агрегат (1) по одному из предыдущих пунктов, отличающийся тем, что орган (30) подъема/опускания и/или по меньшей мере один орган (3, 3a, 3b, 3c) наклона оборудованы системой (103, 130, 70) измерения величины (L103, L130, α8), соответствующей конфигурации этого или этих органов (3, 3a, 3b, 3c, 30).
5. Способ распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата (1) по одному из предыдущих пунктов, отличающийся тем, что включает
первоначальный этап а), на котором до опрыскивания пользователь вводит в блок (5) управления значение минимального расстояния (dmin) между датчиком (6, 6a, 6b, 6c) и обрабатываемой поверхностью (S) участка или растениями и значение максимального расстояния (dmax), превышающего минимальное расстояние (dmin);
предварительный этап b), на котором
агрегат (1) проходит по поверхности (S) участка на первой скорости (V1) по определенной траектории (Т) таким образом, что штанга (2) сканирует всю поверхность (S), при этом пользователь манипулирует на всей траектории (Т) системой (38, 38а, 38b, 38с) ручного управления каждым органом (3, 3a, 3b, 3c) наклона и/или системой (38') ручного управления органом (30) подъема/опускания таким образом, чтобы расстояние (d) между каждым датчиком (6, 6a, 6b, 6c) и поверхностью (S) или растениями находилось в пределах между максимальным расстоянием (dmax) и минимальным расстоянием (dmin),
для выборочных положений агрегата (1) вдоль траектории (Т) блок (5) управления сохраняет в устройстве памяти (52), с одной стороны, расстояние (d) между каждым датчиком (6, 6а, 6b, 6c) и землей или растениями и, с другой стороны, по меньшей мере одну величину (α, αa, αb, αс, α8, L103) наклона каждого плеча (2а, 2b, 2с);
этап распыления с), следующий за этапом b), на котором во время опрыскивания
агрегат (1) проходит по обрабатываемой поверхности (S) на второй скорости (V2), превышающей или равной первой скорости (V1), по траектории (Т), выбранной на предварительном этапе b), и
для каждого положения, выбранного на предварительном этапе b) и в зависимости от сохраненных в устройстве памяти (52) данных (α, αa, αb, αс, α8, L103), блок (5) управления управляет с упреждением органом (30) подъема/опускания и каждым органом (3, 3a, 3b, 3c) наклона таким образом, чтобы расстояние (d) между каждым датчиком (6, 6a, 6b, 6c) и поверхностью (S) или растениями находилось в пределах между максимальным расстоянием (dmax) и минимальным расстоянием (dmin).
6. Способ по п.5, отличающийся тем, что во время этапа распыления с) блок (5) управления управляет с упреждением каждым органом (3, 3a, 3b, 3c) наклона таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), наклон (α, α8, αa, αb, αс) каждого плеча (2а, 2b, 2с) был подобен наклону (α, α8, αa, αb, αс) каждого плеча (2а, 2b, 2с), определенному пользователем на предварительном этапе b).
7. Способ по одному из пп.5 или 6 при помощи агрегата по п.4, отличающийся тем, что во время предварительного этапа b) для выборочных положений агрегата (1) вдоль траектории (Т) блок (5) управления сохраняет в устройстве памяти (52) по меньшей мере одну величину (L103, L130, α8), соответствующую конфигурации органа (30) подъема/опускания и/или по меньшей мере одного органа (3, 3a, 3b, 3c) наклона, и тем, что во время этапа распыления с) для каждого положения, выбранного на предварительном этапе b), блок (5) управления автоматически и с упреждением управляет органом (30) подъема/опускания и/или по меньшей мере одним органом (3, 3a, 3b, 3c) наклона таким образом, чтобы каждая величина (L103, L130, α8) была равна величинам (L103, L130, α8), сохраненным в устройстве памяти во время предварительного этапа b).
8. Способ по одному из пп.5-7, отличающийся тем, что во время первоначального этапа а) пользователь вводит в блок (5) управления значение оптимального расстояния (dopt), находящегося в пределах между минимальным расстоянием (dmin) и максимальным расстоянием (dmax), и тем, что во время этапа распыления с) блок (5) управления управляет автоматически и с упреждением каждым органом (3, 3a, 3b, 3c) наклона и органом (30) подъема/опускания таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), расстояние (d), измеряемое каждым датчиком (6, 6а, 6b, 6c), было, по существу, равно оптимальному расстоянию (dopt).
9. Способ по одному из пп.5-8, отличающийся тем, что во время первоначального этапа а) пользователь вводит в блок (5) управления значение оптимального расстояния (dopt), находящегося в пределах между минимальным расстоянием (dmin) и максимальным расстоянием (dmax), и во время предварительного этапа b), как только расстояние (d), измеряемое по меньшей мере одним датчиком (6, 6a, 6b, 6с), становится меньше минимального расстояния (dmin), блок (5) управления управляет автоматически и приоритетно органом (30) подъема/опускания для удаления штанги (2) от поверхности (S), пока расстояние (d), измеряемое каждым датчиком (6, 6а, 6b, 6с), не станет больше или равным оптимальному расстоянию (dopt).
10. Способ по одному из пп.5-9, отличающийся тем, что во время первоначального этапа а) пользователь вводит в блок (5) управления значение оптимального расстояния (dopt), находящегося в пределах между минимальным расстоянием (dmin) и максимальным расстоянием (dmax), и во время предварительного этапа b) блок (5) управления управляет автоматически органом (30) подъема/опускания и органом и/или по меньшей мере одним органом (3, 3a, 3b, 3c) наклона таким образом, чтобы расстояние (d), измеряемое каждым датчиком (6, 6a, 6b, 6c), было, по существу, равно оптимальному расстоянию (dopt), при этом пользователь управляет системой (38') ручного управления органом (30) подъема/опускания и/или системой (38, 38а, 38b, 38с) ручного управления каждым органом (3, 3a, 3b, 3c) наклона, чтобы корректировать действия управления блока (5) управления.
11. Способ распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата (1) по одному из пп.1-4, отличающийся тем, что включает
первоначальный этап а2), на котором до опрыскивания пользователь вводит в блок (5) управления значение минимального расстояния (dmin) и значение оптимального расстояния (dopt), превышающего минимальное расстояние (dmin);
предварительный этап b2), который следует за первоначальным этапом а2) и на котором
агрегат (1) проходит по поверхности (S) участка на первой скорости (V1) по определенной траектории (Т) таким образом, чтобы штанга (2) сканировала всю поверхность (S),
как только расстояние (d), измеряемое по меньшей мере одним датчиком (6, 6а, 6b, 6с), становится меньше минимального расстояния (dmin), введенного на первоначальном этапе а2), блок (5) управления управляет органом (30) подъема/опускания, пока расстояние (d), измеряемое этим или этими датчиками (6, 6a, 6b, 6с), не станет равным оптимальному расстоянию (dopt),
пользователь манипулирует системой (38, 38а, 38b, 38с) ручного управления каждым органом (3, 3a, 3b, 3c) наклона таким образом, чтобы расстояние (d), измеряемое каждым датчиком (6, 6а, 6b, 6c), в основном было равно оптимальному расстоянию (dopt),
каждый раз, когда пользователь приводит в действие систему (38, 38а, 38b, 38с) ручного управления органом (3, 3a, 3b, 3c) наклона, блок (5) управления сохраняет в устройстве памяти (52) положение агрегата (1) вдоль траектории (Т) и либо продолжительность этого приведения в действие, либо расстояние, пройденное агрегатом (1) во время этого приведения в действие, спустя несколько секунд после завершения этого приведения в действие блок (5) управления сохраняет в устройстве памяти (52) первую величину (α, αa, αb, αc, α8, L103) наклона плеча (2а, 2b, 2с), соответствующего задействованной системе (38, 38а, 38b, 38с) ручного управления;
этап распыления с2), который следует за этапом b2) и на котором во время опрыскивания
агрегат (1) проходит по поверхности (S) на второй скорости (V2), превышающей или равной первой скорости (V1), по траектории (Т), выбранной на предварительном этапе b2), и
когда агрегат (1) достигает одного из положений, сохраненных в устройстве памяти на предварительном этапе b2), блок (5) управления управляет органом (3, 3a, 3b, 3c) наклона, приведенным в действие для этого положения пользователем на предварительном этапе b2), либо в течение времени, равного соответствующей продолжительности приведения в действие, сохраненной в устройстве памяти на предварительном этапе b2), либо пока агрегат (1) не пройдет расстояние, равное соответствующему расстоянию, пройденному во время предварительного этапа b2), и несколько минут спустя после завершения приведения в действие блок (5) управления сравнивает вторую величину (α, αa, αb, αc, α8, L103) наклона соответствующего плеча (2а, 2b, 2с) с соответствующей первой величиной (α, αa, αb, αс, α8, L103), сохраненной в памяти на предварительном этапе b2), и, если вторая величина (α, αa, αb, αc, α8, L103) отличается ±1% от первой величины (α, αa, αb, αc, α8, L103), блок (5) управления управляет этим органом (3, 3a, 3b, 3с) наклона в сторону уменьшения разности между второй величиной (α, αa, αb, αc, α8, L103) и первой величиной (α, αa, αb, αc, α8, L103).
12. Способ по одному из пп.5-11, отличающийся тем, что минимальное расстояние (dmin) составляет от 30 до 70 см, предпочтительно примерно равно 50 см.
13. Способ по одному из пп.5-10, отличающийся тем, что максимальное расстояние (dmax) составляет от 70 до 150 см, предпочтительно примерно равно 100 см.
14. Способ по одному из пп.8-13, отличающийся тем, что оптимальное расстояние (dopt) составляет от 50 до 100 см, предпочтительно примерно равно 70 см.

Текст
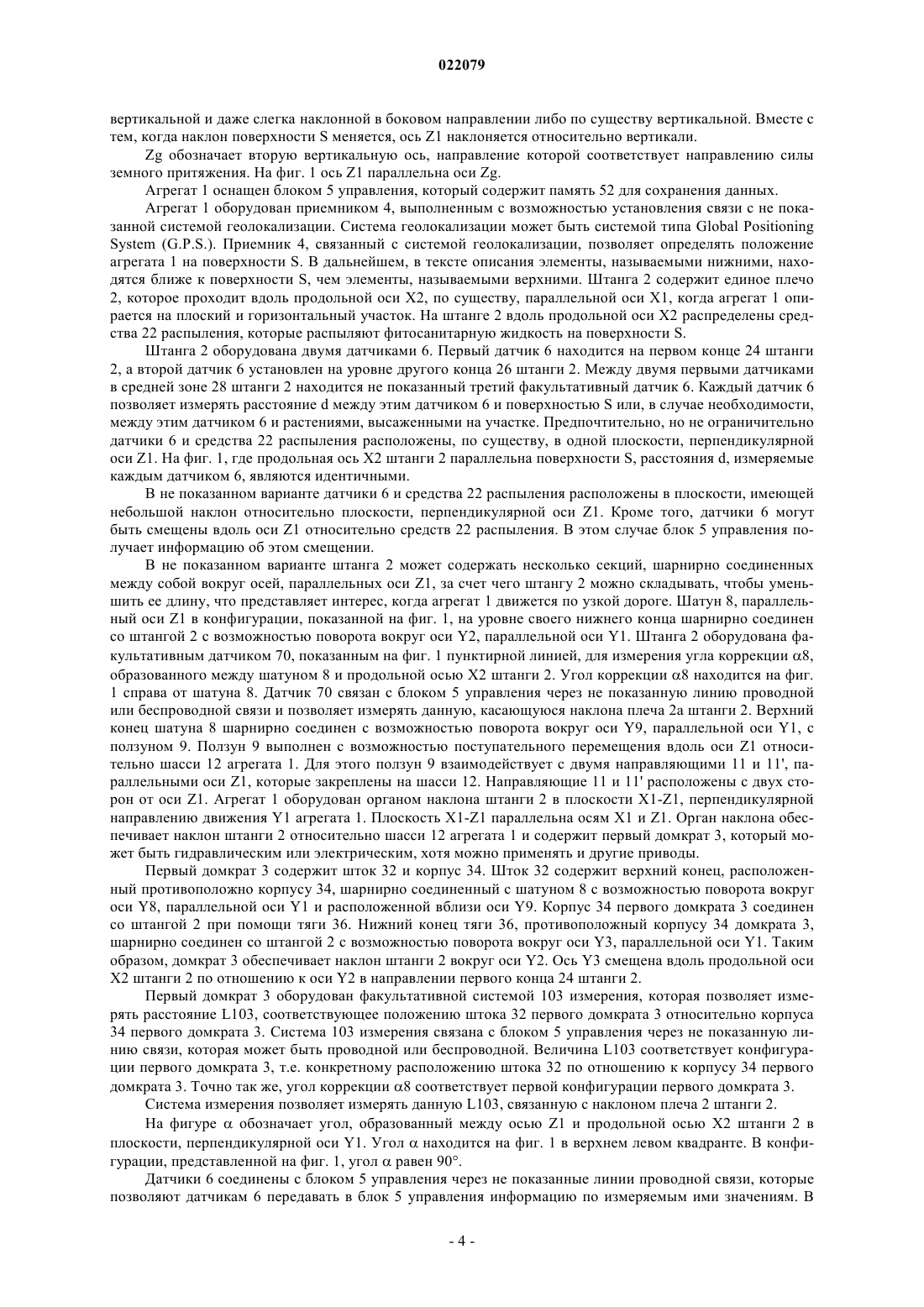
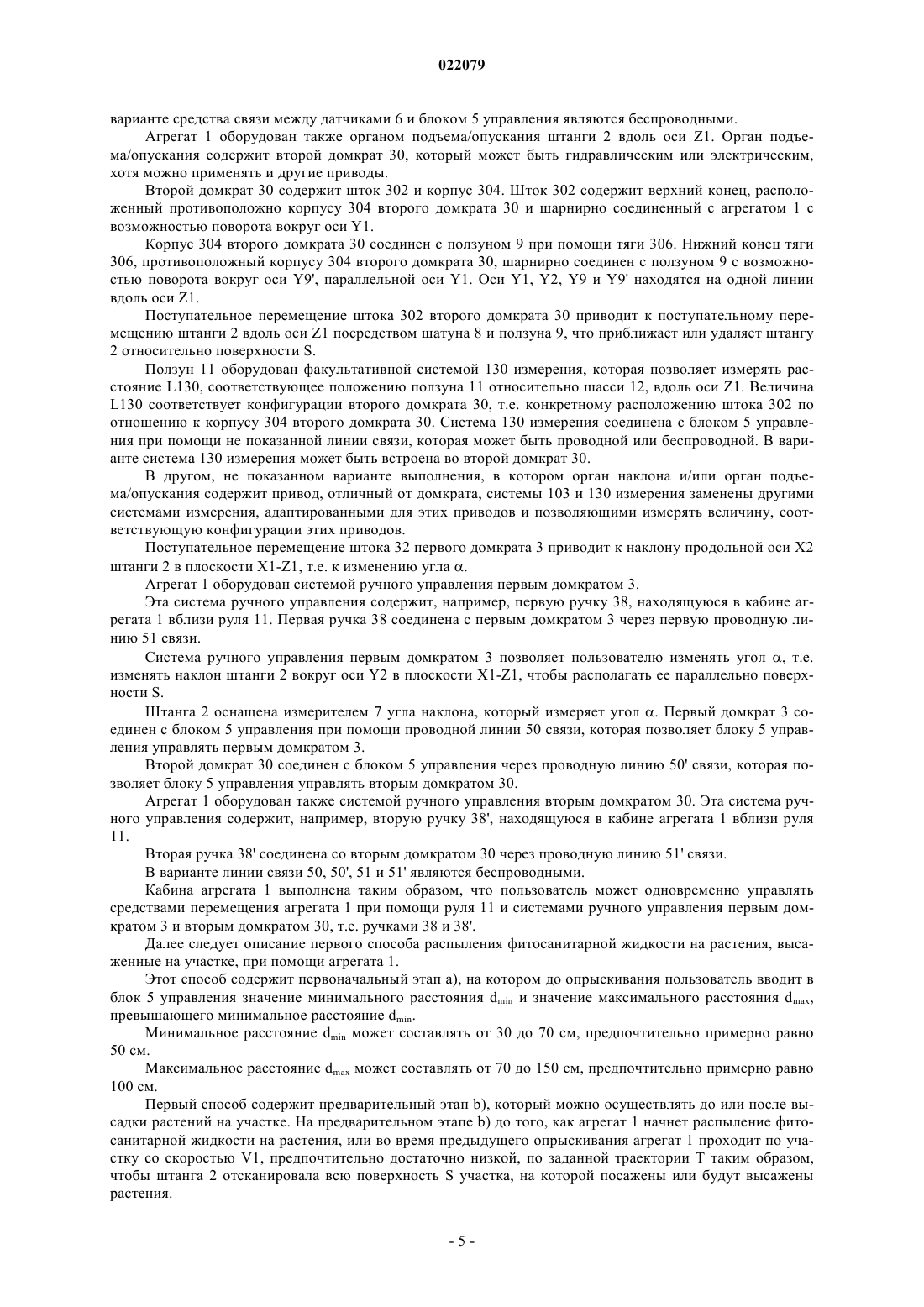
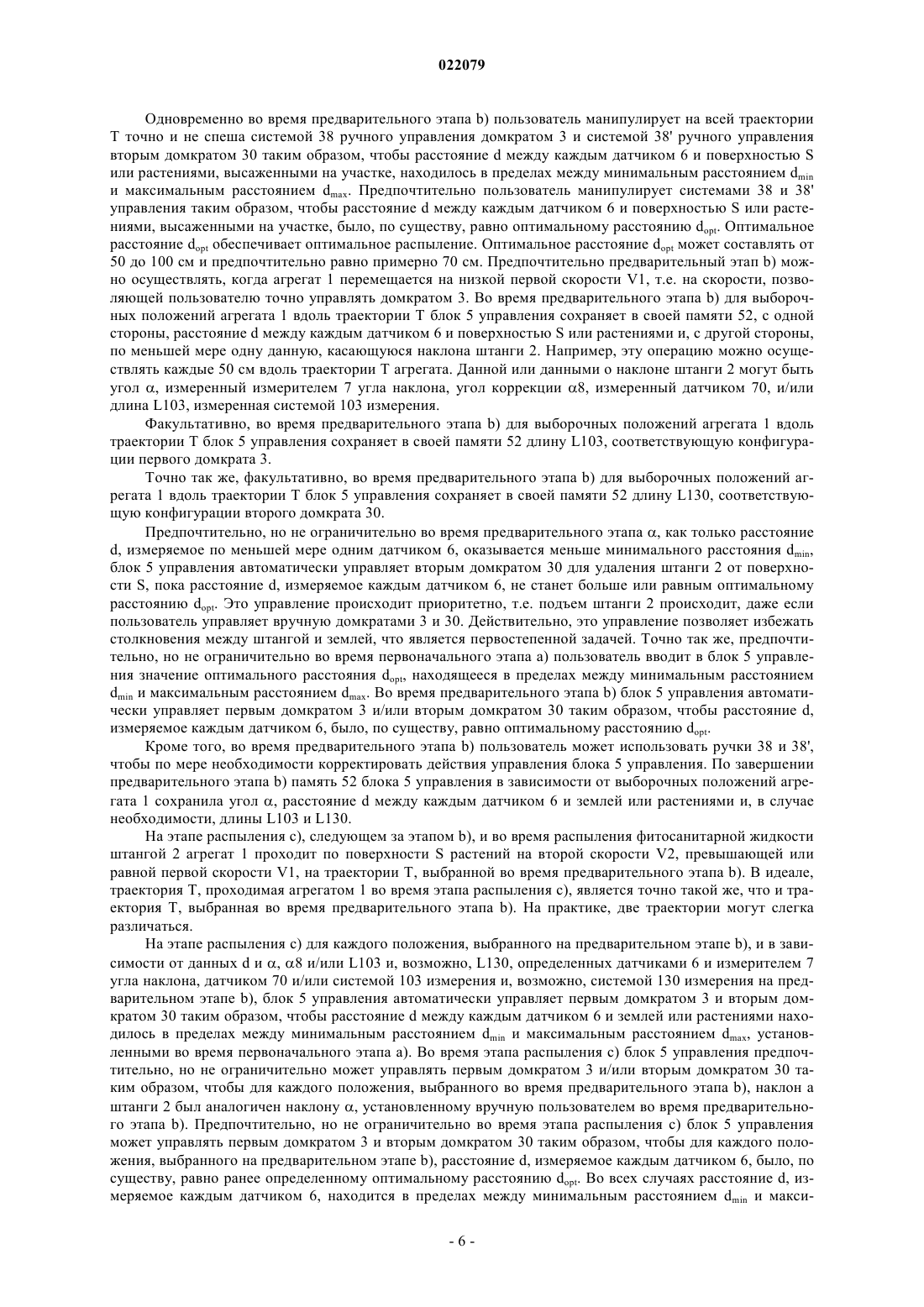
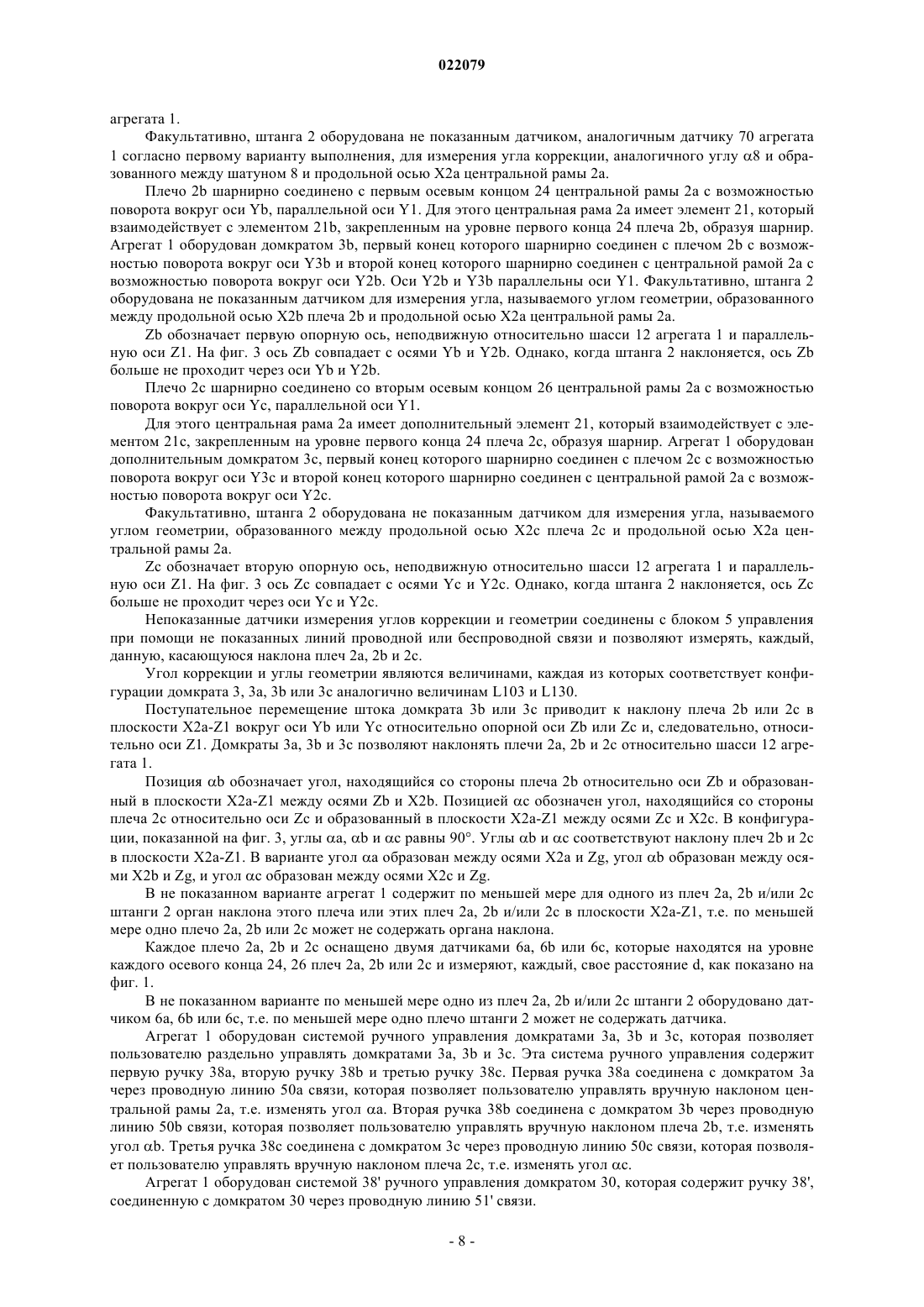
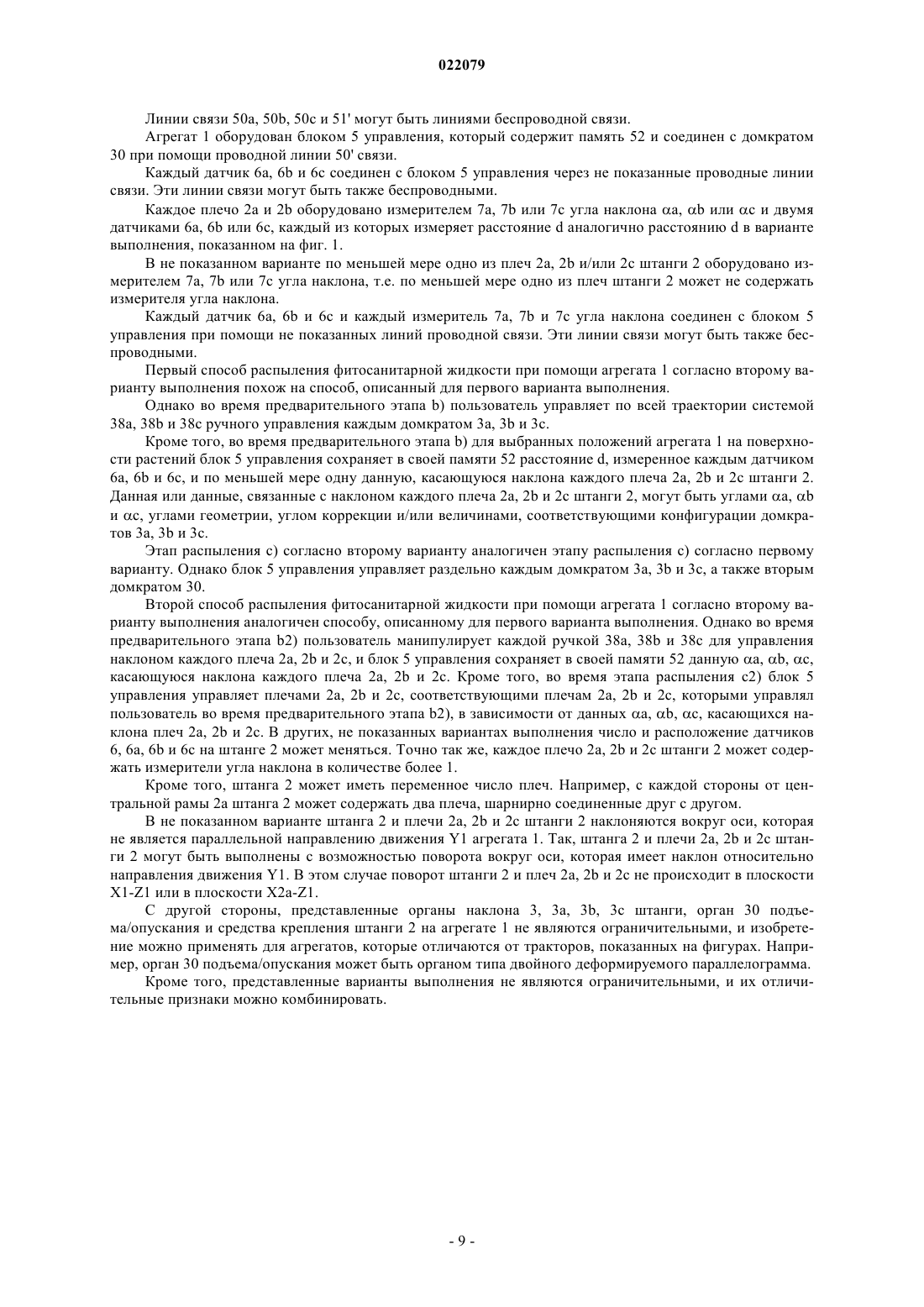
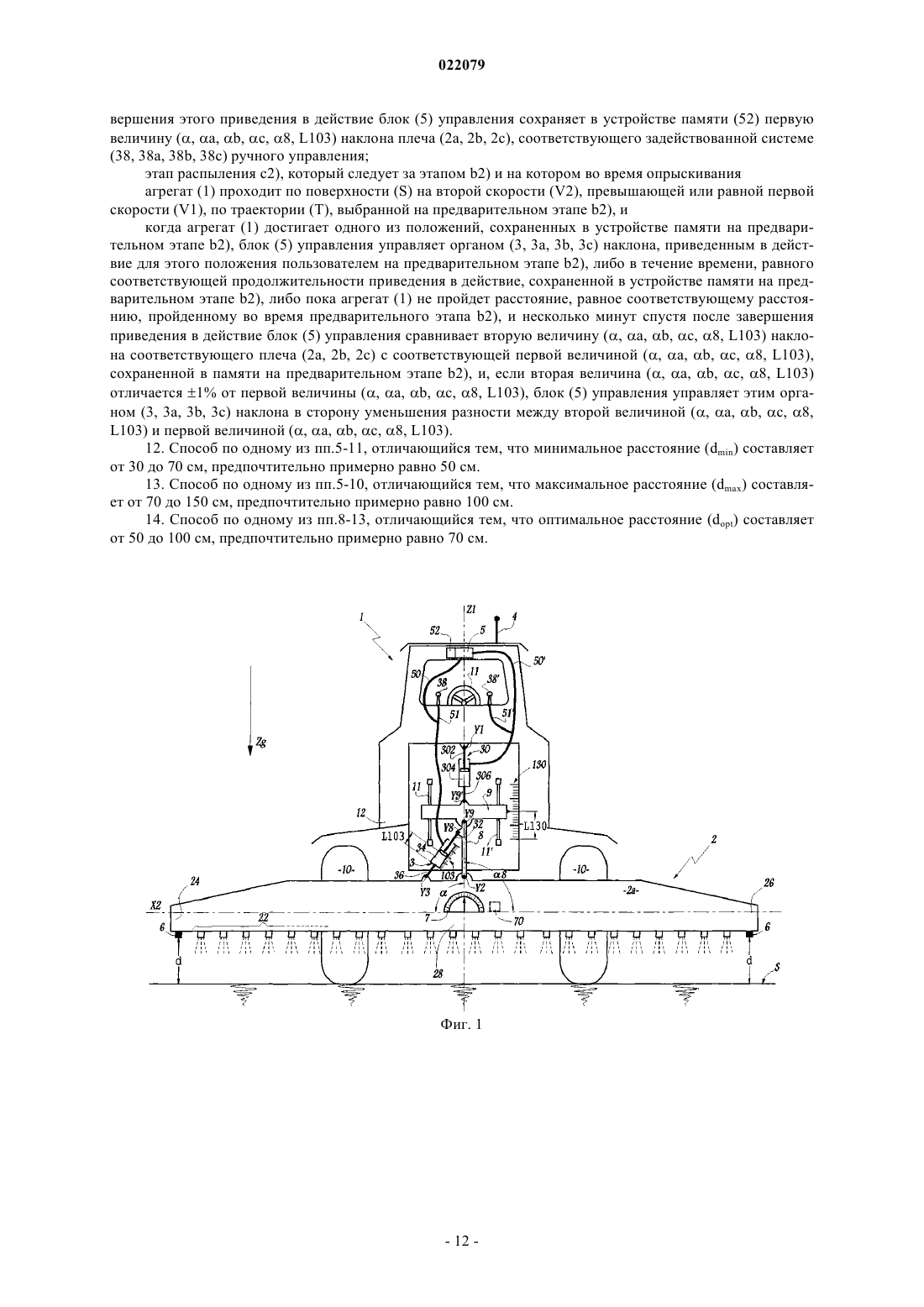
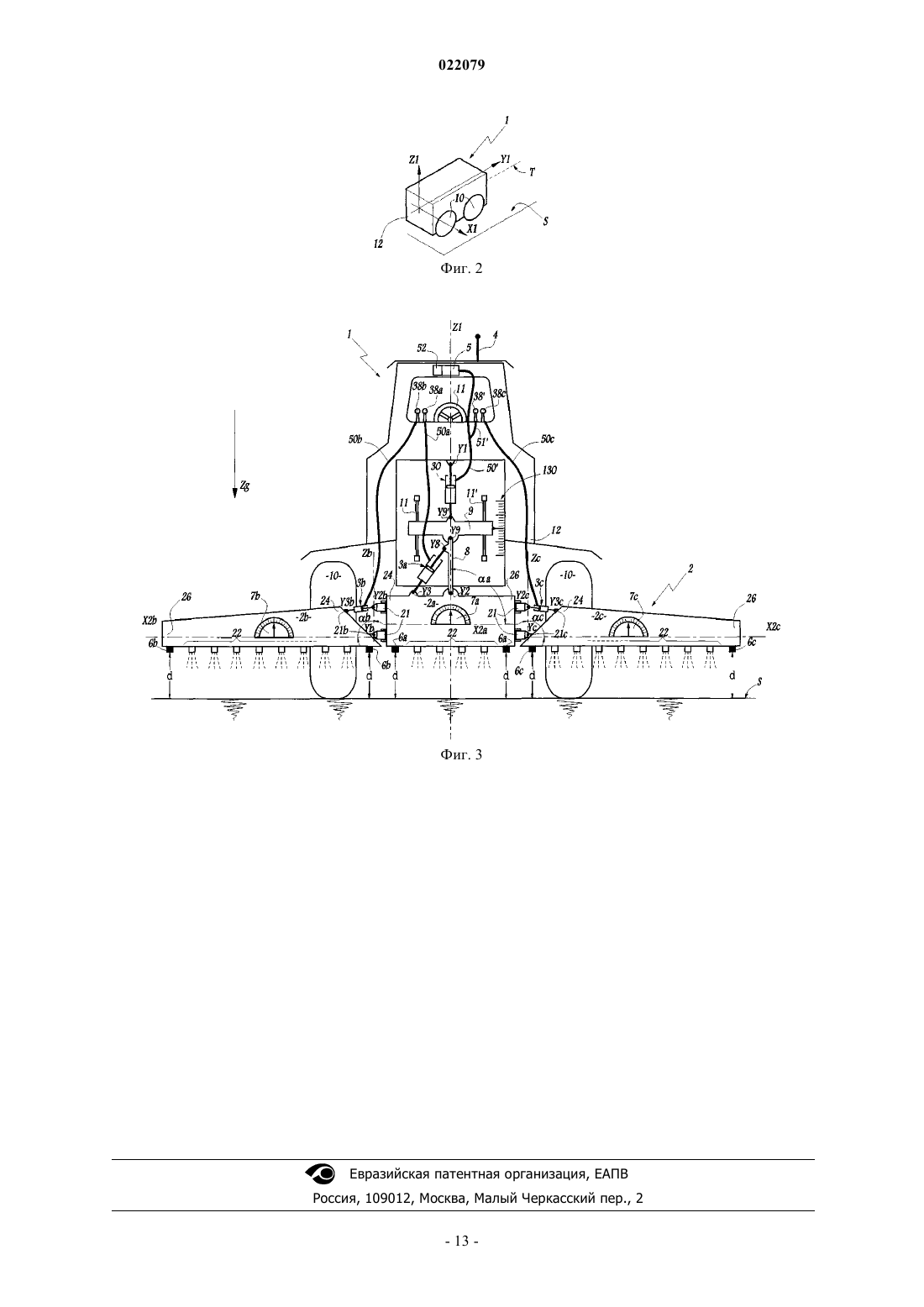
СЕЛЬСКОХОЗЯЙСТВЕННЫЙ РАСПЫЛИТЕЛЬНЫЙ АГРЕГАТ И СПОСОБ РАСПЫЛЕНИЯ ФИТОСАНИТАРНОЙ ЖИДКОСТИ НА УЧАСТКЕ,ОБРАБАТЫВАЕМОМ ПРИ ПОМОЩИ ТАКОГО АГРЕГАТА Объектом изобретения является сельскохозяйственный агрегат (1) для распыления фитосанитарной жидкости на растениях, посаженных на участке земли, включающий в себя распылительную штангу (2), содержащую по меньшей мере одно плечо (2 а), орган подъема/опускания штанги(30) и для каждого плеча (2 а) - орган (3) наклона плеча (2 а), систему (38) ручного управления каждым органом (3) наклона, а также приемник (4), выполненный с возможностью связи с системой геолокализации, и блок (5) управления. Каждое плечо (2 а) оснащено по меньшей мере одним датчиком (6), измеряющим расстояние (d) между упомянутым датчиком и поверхностью (S) участка или растениями, высаженными на участке, и элементом (7, 70, 103) измерения данной, касающейся наклона плеча (2 а). Блок (5) управления соединен с каждым датчиком (6) приемником (4) и с измерительным элементом (7, 70, 103), имеет память (52) и выполнен с возможностью управления каждым органом (3) наклона и органом (30) подъема/опускания в зависимости от данных (d, ),сохраненных в памяти (52). Настоящее изобретение касается сельскохозяйственного распылительного агрегата, а также способа распыления фитосанитарной жидкости на участке, обрабатываемом при помощи такого агрегата. Известно использование сельскохозяйственного агрегата, оборудованного полевой штангой для опрыскивания растений, посаженных на участке, который может иметь неровности, например ямы или бугры, и уклон которого может меняться. Для удовлетворительного опрыскивания растений фитосанитарной жидкостью штанга не должна быть слишком удалена от растений, чтобы избегать рассеяния капель фитосанитарной жидкости в атмосферу. Кроме того, если штанга расположена слишком близко к земле, она может столкнуться с землей и/или с растениями, что может привести к повреждению распылительной штанги и к забиванию распылительных насадок штанги. Классически сельскохозяйственный агрегат оборудован домкратами для наклона своей распылительной штанги относительно своего шасси, что позволяет адаптировать штангу к изменениям геометрии участка. Когда сельскохозяйственный агрегат опрыскивает растения фитосанитарной жидкостью, пользователь вручную управляет наклоном распылительной штанги, чтобы она не находилась слишком близко или слишком далеко от растений или от земли. Однако во время опрыскивания растений фитосанитарной жидкостью пользователю нелегко управлять наклоном и высотой штанги, так как он должен в это же время управлять движением агрегата, например трактора вдоль траектории. Кроме того, пользователь всегда стремится работать как можно быстрее и не может слишком снижать скорость агрегата. Если штанга содержит несколько шарнирных плеч, управление затруднено еще больше, так как пользователь управляет вручную изменяющейся геометрией штанги, т.е. наклоном различных плеч. Согласно другому аспекту, учитывая инерцию полевой штанги, которая остается в подвешенном положении, чтобы не реагировать на неровности участка под колесами агрегата, каждое изменение наклона штанги и, в случае необходимости, ее переменной геометрии приводит к перемещению центра тяжести и к повороту штанги за пределы угла, вручную корректируемого пользователем. Это приводит к колебаниям наподобие маятниковых, в результате которых один из концов штанги может уткнуться в землю. Кроме того, эти колебания могут усложнить и замедлить правильную коррекцию наклона и/или переменной геометрии штанги. Этот недостаток присутствует также в известных системах автоматической коррекции наклона, таких как система, описанная в документе DE-A-4140254. Кроме того, когда пользователь управляет вручную наклоном штанги во время опрыскивания,штанга и ее подвеска являются неустойчивыми, так как они подвержены влиянию инерции, что является недостатком. Это влияние становится еще заметнее при увеличении скорости агрегата. Задачей изобретения является устранение вышеуказанных недостатков и разработка сельскохозяйственного распылительного агрегата и способа распыления, обеспечивающих легкое и оптимизированное опрыскивание и ограничивающих риски столкновений между штангой и землей. В связи с этим объектом изобретения является сельскохозяйственный агрегат для распыления фитосанитарной жидкости на обрабатываемом участке, содержащий средства перемещения агрегата по поверхности участка; штангу для распыления фитосанитарной жидкости, имеющую по меньшей мере одно плечо; для плеча или по меньшей мере одного из плеч - орган наклона плеча по отношению к шасси сельскохозяйственного агрегата; орган подъема/опускания штанги вдоль первой оси, неподвижной относительно шасси сельскохозяйственного агрегата и вертикальной или по существу вертикальной, когда агрегат опирается на плоскую и горизонтальную поверхность, или по отношению ко второй оси того же направления, что и направление силы земного притяжения; систему ручного управления каждым органом наклона и органом подъема/опускания; приемник, выполненный с возможностью связи с системой геолокализации; и блок управления,при этом по меньшей мере одно из плеч штанги оснащено по меньшей мере одним датчиком, при этом каждый датчик измеряет расстояние между поверхностью участка и этим датчиком или, в случае необходимости, между растениями, посаженными на участке, и этим датчиком. Плечо или по меньшей мере одно из плеч штанги оснащено по меньшей мере одним элементом измерения данной, касающейся наклона продольной оси этого плеча в плоскости, перпендикулярной направлению движения. Блок управления соединен с каждым датчиком, с приемником и с измерительным элементом; имеет память для сохранения данных, поступающих от каждого датчика, от приемника и от каждого измерительного элемента и выполнен с возможностью управления каждым органом наклона и органом подъема/опускания в зависимости от данных, сохраненных в памяти. Благодаря изобретению данные, получаемые от приемника, датчиков и измерительного элемента,позволяют штанге во время опрыскивания автоматически адаптироваться к изменениям геометрии уча-1 022079 стка и оптимально располагаться для нормального опрыскивания. Согласно предпочтительным, но не ограничительным вариантам изобретения такой агрегат может содержать один или несколько следующих отличительных признаков, взятых в любой технически допустимой комбинации: по меньшей мере один орган наклона и/или орган подъема/опускания содержит гидравлический или электрический домкрат; по меньшей мере одно из плеч штанги оборудовано двумя датчиками; орган подъема/опускания и/или орган или по меньшей мере один орган наклона оборудованы системой измерения величины, соответствующей конфигурации этого или этих органов. Объектом изобретения является также первый способ распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата в соответствии с изобретением, содержащий первоначальный этап а), на котором до опрыскивания пользователь вводит в блок управления значение минимального расстояния и значение максимального расстояния, превышающего минимальное расстояние; предварительный этап b), на котором агрегат проходит по поверхности участка на первой скорости по определенной траектории таким образом, что штанга сканирует всю поверхность, при этом пользователь манипулирует на всей траектории системой ручного управления каждым органом наклона и/или системой ручного управления органом подъема/опускания таким образом, чтобы расстояние между каждым датчиком и поверхностью или растениями находилось в пределах между максимальным расстоянием и минимальным расстоянием,для выборочных положений агрегата вдоль траектории блок управления сохраняет в своей памяти,с одной стороны, расстояние между каждым датчиком и поверхностью или растениями и, с другой стороны, по меньшей мере одну данную, касающуюся наклона каждого плеча; этап распыления с), следующий за этапом b), на котором во время опрыскивания агрегат проходит по поверхности на второй скорости, превышающей или равной первой скорости,по траектории, выбранной на предварительном этапе b), и для каждого положения, выбранного на предварительном этапе b) и в зависимости от сохраненных в памяти данных, блок управления управляет с упреждением органом подъема/опускания и каждым органом наклона таким образом, чтобы расстояние между каждым датчиком и поверхностью или растениями находилось в пределах между максимальным расстоянием и минимальным расстоянием. Согласно предпочтительным, но не ограничительным вариантам изобретения такой способ может содержать один или несколько следующих отличительных признаков, взятых в любой технически допустимой комбинации: во время этапа распыления с) блок управления управляет с упреждением каждым органом наклона таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), наклон каждого плеча был подобен наклону каждого плеча, определенному пользователем на предварительном этапе b); во время предварительного этапа b) для выборочных положений агрегата вдоль траектории блок управления сохраняет в своей памяти по меньшей мере одну величину, соответствующую конфигурации органа подъема/опускания и/или органа или по меньшей мере одного органа наклона, и во время этапа распыления с) для каждого положения, выбранного на предварительном этапе b), блок управления автоматически и с упреждением управляет органом подъема/опускания и органом или по меньшей мере одним органом наклона таким образом, чтобы каждая величина была равна величинам, сохраненным в памяти во время предварительного этапа b); во время первоначального этапа а) пользователь вводит в блок управления значение оптимального расстояния, находящегося в пределах между минимальным расстоянием и максимальным расстоянием, и во время этапа распыления с) блок управления управляет автоматически и с упреждением каждым органом наклона и органом подъема/опускания таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), расстояние, измеряемое каждым датчиком, было, по существу, равно оптимальному расстоянию; во время первоначального этапа а) пользователь вводит в блок управления значение оптимального расстояния, находящегося в пределах между минимальным расстоянием и максимальным расстоянием, и во время предварительного этапа b), как только расстояние, измеряемое по меньшей мере одним датчиком, становится меньше минимального расстояния, блок управления управляет автоматически и приоритетно органом подъема/опускания для удаления штанги от поверхности, пока расстояние, измеряемое каждым датчиком, не станет больше или равным оптимальному расстоянию; во время первоначального этапа а) пользователь вводит в блок управления значение оптимального расстояния, находящегося в пределах между минимальным расстоянием и максимальным расстоянием, и во время предварительного этапа b) блок управления управляет автоматически органом подъема/опускания и органом или по меньшей мере одним органом наклона таким образом, чтобы расстояние,измеряемое каждым датчиком, было, по существу, равно оптимальному расстоянию, при этом пользователь управляет системой ручного управления органом подъема/опускания и/или системой ручного управления каждым органом наклона таким образом, чтобы корректировать действия управления блока управления. Объектом изобретения является также второй способ распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата в соответствии с изобретением. Этот второй способ содержит первоначальный этап а 2), на котором до опрыскивания пользователь вводит в блок управления значение минимального расстояния и значение оптимального расстояния, превышающего минимальное расстояние; предварительный этап b2), который следует за первоначальным этапом а 2) и на котором агрегат проходит по поверхности участка на первой скорости по определенной траектории таким образом, чтобы штанга отсканировала всю поверхность,как только расстояние, измеряемое по меньшей мере одним датчиком, становится меньше минимального расстояния, введенного на первоначальном этапе а 2), блок управления управляет органом подъема/опускания, пока расстояние, измеряемое этим или этими датчиками, не станет равным оптимальному расстоянию,пользователь манипулирует системой ручного управления каждым органом наклона таким образом,чтобы расстояние, измеряемое каждым датчиком, в основном было равно оптимальному расстоянию,каждый раз, когда пользователь приводит в действие систему ручного управления органом наклона,блок управления сохраняет в своей памяти положение агрегата вдоль траектории и либо продолжительность этого приведения в действие, либо расстояние, пройденное агрегатом во время этого приведения в действие, и спустя несколько секунд после завершения этого приведения в действие блок управления сохраняет в памяти первую данную, касающуюся наклона плеча, соответствующего приведенной в действие системы ручного управления; этап распыления с 2), который следует за этапом b2) и на котором во время опрыскивания агрегат проходит по поверхности на второй скорости, превышающей или равной первой скорости,по траектории, выбранной на предварительном этапе b2), и когда агрегат достигает одного из положений, сохраненных в памяти на предварительном этапе b2),блок управления управляет органом наклона, приведенным в действие для этого положения пользователем на предварительном этапе b2), либо в течение времени, равного соответствующей продолжительности приведения в действие, сохраненной в памяти на предварительном этапе b2), либо пока агрегат не пройдет расстояние, равное соответствующему расстоянию, пройденному во время предварительного этапа b2), и несколько минут спустя после завершения приведения в действие блок управления сравнивает вторую данную, касающуюся наклона соответствующего плеча, с соответствующей первой данной,сохраненной в памяти на предварительном этапе b), и, если вторая данная отличается на 1% от первой данной, блок управления управляет этим органом наклона в сторону уменьшения разности между второй данной и первой данной. Согласно предпочтительным, но не ограничительным вариантам изобретения такие способы могут содержать один или несколько следующих отличительных признаков, взятых в любой технически допустимой комбинации: минимальное расстояние составляет от 30 до 70 см, предпочтительно примерно равно 50 см; оптимальное расстояние составляет от 50 до 100 см, предпочтительно примерно равно 70 см; максимальное расстояние составляет от 70 до 150 см, предпочтительно примерно равно 100 см. Изобретение и его другие преимущества будут более очевидны из нижеследующего описания сельскохозяйственного распылительного агрегата и способа распыления в соответствии с изобретением,представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых изображено: фиг. 1 - вид сзади сельскохозяйственного агрегата в соответствии с изобретением; фиг. 2 - схематичный вид в изометрии агрегата, показанного на фиг. 1; фиг. 3 - вид, аналогичный фиг. 1, сельскохозяйственного агрегата согласно второму варианту выполнения изобретения. На фиг. 1 показан сельскохозяйственный агрегат 1 для распыления фитосанитарной жидкости, оборудованный полевой распылительной штангой 2, расположенной сзади агрегата 1. В альтернативном варианте штанга 2 может быть расположена спереди агрегата 1. Агрегат 1 оборудован также не показанным двигателем, который принадлежит к средствам перемещения агрегата 1 по земле с трансмиссией,рулем 11 и колесами 10. Таким образом, агрегат является самоходным и автономным, но в альтернативном варианте штанга 2 может быть установлена на прицепе, соединенном с любым самоходным средством. Агрегат 1 является трактором, хотя можно использовать и другие машины. На фиг. 2, где представлен схематичный вид агрегата 1, X1 обозначает поперечную ось агрегата 1,перпендикулярную направлению его движения по прямой линии, Y1 обозначает продольную ось шасси 12 агрегата 1, параллельную направлению его движения по прямой линии, и Z1 обозначает ось агрегата 1, перпендикулярную осям X1 и Y1. Оси X1, Y1 и Z1 являются неподвижными относительно шасси 12 агрегата 1. Показанный на фиг. 1 и 2 агрегат 1 опирается на поверхность S горизонтального плоского участка, на котором могут быть высажены не показанные растения. Таким образом, поперечная ось X1 шасси 12 агрегата 1 является горизонтальной или даже слегка наклонной по высоте, а ось Z1 является вертикальной и даже слегка наклонной в боковом направлении либо по существу вертикальной. Вместе с тем, когда наклон поверхности S меняется, ось Z1 наклоняется относительно вертикали.Zg обозначает вторую вертикальную ось, направление которой соответствует направлению силы земного притяжения. На фиг. 1 ось Z1 параллельна оси Zg. Агрегат 1 оснащен блоком 5 управления, который содержит память 52 для сохранения данных. Агрегат 1 оборудован приемником 4, выполненным с возможностью установления связи с не показанной системой геолокализации. Система геолокализации может быть системой типа Global PositioningSystem (G.P.S.). Приемник 4, связанный с системой геолокализации, позволяет определять положение агрегата 1 на поверхности S. В дальнейшем, в тексте описания элементы, называемыми нижними, находятся ближе к поверхности S, чем элементы, называемыми верхними. Штанга 2 содержит единое плечо 2, которое проходит вдоль продольной оси Х 2, по существу, параллельной оси X1, когда агрегат 1 опирается на плоский и горизонтальный участок. На штанге 2 вдоль продольной оси Х 2 распределены средства 22 распыления, которые распыляют фитосанитарную жидкость на поверхности S. Штанга 2 оборудована двумя датчиками 6. Первый датчик 6 находится на первом конце 24 штанги 2, а второй датчик 6 установлен на уровне другого конца 26 штанги 2. Между двумя первыми датчиками в средней зоне 28 штанги 2 находится не показанный третий факультативный датчик 6. Каждый датчик 6 позволяет измерять расстояние d между этим датчиком 6 и поверхностью S или, в случае необходимости,между этим датчиком 6 и растениями, высаженными на участке. Предпочтительно, но не ограничительно датчики 6 и средства 22 распыления расположены, по существу, в одной плоскости, перпендикулярной оси Z1. На фиг. 1, где продольная ось Х 2 штанги 2 параллельна поверхности S, расстояния d, измеряемые каждым датчиком 6, являются идентичными. В не показанном варианте датчики 6 и средства 22 распыления расположены в плоскости, имеющей небольшой наклон относительно плоскости, перпендикулярной оси Z1. Кроме того, датчики 6 могут быть смещены вдоль оси Z1 относительно средств 22 распыления. В этом случае блок 5 управления получает информацию об этом смещении. В не показанном варианте штанга 2 может содержать несколько секций, шарнирно соединенных между собой вокруг осей, параллельных оси Z1, за счет чего штангу 2 можно складывать, чтобы уменьшить ее длину, что представляет интерес, когда агрегат 1 движется по узкой дороге. Шатун 8, параллельный оси Z1 в конфигурации, показанной на фиг. 1, на уровне своего нижнего конца шарнирно соединен со штангой 2 с возможностью поворота вокруг оси Y2, параллельной оси Y1. Штанга 2 оборудована факультативным датчиком 70, показанным на фиг. 1 пунктирной линией, для измерения угла коррекции 8,образованного между шатуном 8 и продольной осью Х 2 штанги 2. Угол коррекции 8 находится на фиг. 1 справа от шатуна 8. Датчик 70 связан с блоком 5 управления через не показанную линию проводной или беспроводной связи и позволяет измерять данную, касающуюся наклона плеча 2 а штанги 2. Верхний конец шатуна 8 шарнирно соединен с возможностью поворота вокруг оси Y9, параллельной оси Y1, с ползуном 9. Ползун 9 выполнен с возможностью поступательного перемещения вдоль оси Z1 относительно шасси 12 агрегата 1. Для этого ползун 9 взаимодействует с двумя направляющими 11 и 11', параллельными оси Z1, которые закреплены на шасси 12. Направляющие 11 и 11' расположены с двух сторон от оси Z1. Агрегат 1 оборудован органом наклона штанги 2 в плоскости X1-Z1, перпендикулярной направлению движения Y1 агрегата 1. Плоскость X1-Z1 параллельна осям X1 и Z1. Орган наклона обеспечивает наклон штанги 2 относительно шасси 12 агрегата 1 и содержит первый домкрат 3, который может быть гидравлическим или электрическим, хотя можно применять и другие приводы. Первый домкрат 3 содержит шток 32 и корпус 34. Шток 32 содержит верхний конец, расположенный противоположно корпусу 34, шарнирно соединенный с шатуном 8 с возможностью поворота вокруг оси Y8, параллельной оси Y1 и расположенной вблизи оси Y9. Корпус 34 первого домкрата 3 соединен со штангой 2 при помощи тяги 36. Нижний конец тяги 36, противоположный корпусу 34 домкрата 3,шарнирно соединен со штангой 2 с возможностью поворота вокруг оси Y3, параллельной оси Y1. Таким образом, домкрат 3 обеспечивает наклон штанги 2 вокруг оси Y2. Ось Y3 смещена вдоль продольной оси Х 2 штанги 2 по отношению к оси Y2 в направлении первого конца 24 штанги 2. Первый домкрат 3 оборудован факультативной системой 103 измерения, которая позволяет измерять расстояние L103, соответствующее положению штока 32 первого домкрата 3 относительно корпуса 34 первого домкрата 3. Система 103 измерения связана с блоком 5 управления через не показанную линию связи, которая может быть проводной или беспроводной. Величина L103 соответствует конфигурации первого домкрата 3, т.е. конкретному расположению штока 32 по отношению к корпусу 34 первого домкрата 3. Точно так же, угол коррекции 8 соответствует первой конфигурации первого домкрата 3. Система измерения позволяет измерять данную L103, связанную с наклоном плеча 2 штанги 2. На фигуреобозначает угол, образованный между осью Z1 и продольной осью Х 2 штанги 2 в плоскости, перпендикулярной оси Y1. Уголнаходится на фиг. 1 в верхнем левом квадранте. В конфигурации, представленной на фиг. 1, уголравен 90. Датчики 6 соединены с блоком 5 управления через не показанные линии проводной связи, которые позволяют датчикам 6 передавать в блок 5 управления информацию по измеряемым ими значениям. В варианте средства связи между датчиками 6 и блоком 5 управления являются беспроводными. Агрегат 1 оборудован также органом подъема/опускания штанги 2 вдоль оси Z1. Орган подъема/опускания содержит второй домкрат 30, который может быть гидравлическим или электрическим,хотя можно применять и другие приводы. Второй домкрат 30 содержит шток 302 и корпус 304. Шток 302 содержит верхний конец, расположенный противоположно корпусу 304 второго домкрата 30 и шарнирно соединенный с агрегатом 1 с возможностью поворота вокруг оси Y1. Корпус 304 второго домкрата 30 соединен с ползуном 9 при помощи тяги 306. Нижний конец тяги 306, противоположный корпусу 304 второго домкрата 30, шарнирно соединен с ползуном 9 с возможностью поворота вокруг оси Y9', параллельной оси Y1. Оси Y1, Y2, Y9 и Y9' находятся на одной линии вдоль оси Z1. Поступательное перемещение штока 302 второго домкрата 30 приводит к поступательному перемещению штанги 2 вдоль оси Z1 посредством шатуна 8 и ползуна 9, что приближает или удаляет штангу 2 относительно поверхности S. Ползун 11 оборудован факультативной системой 130 измерения, которая позволяет измерять расстояние L130, соответствующее положению ползуна 11 относительно шасси 12, вдоль оси Z1. ВеличинаL130 соответствует конфигурации второго домкрата 30, т.е. конкретному расположению штока 302 по отношению к корпусу 304 второго домкрата 30. Система 130 измерения соединена с блоком 5 управления при помощи не показанной линии связи, которая может быть проводной или беспроводной. В варианте система 130 измерения может быть встроена во второй домкрат 30. В другом, не показанном варианте выполнения, в котором орган наклона и/или орган подъема/опускания содержит привод, отличный от домкрата, системы 103 и 130 измерения заменены другими системами измерения, адаптированными для этих приводов и позволяющими измерять величину, соответствующую конфигурации этих приводов. Поступательное перемещение штока 32 первого домкрата 3 приводит к наклону продольной оси Х 2 штанги 2 в плоскости X1-Z1, т.е. к изменению угла . Агрегат 1 оборудован системой ручного управления первым домкратом 3. Эта система ручного управления содержит, например, первую ручку 38, находящуюся в кабине агрегата 1 вблизи руля 11. Первая ручка 38 соединена с первым домкратом 3 через первую проводную линию 51 связи. Система ручного управления первым домкратом 3 позволяет пользователю изменять угол , т.е. изменять наклон штанги 2 вокруг оси Y2 в плоскости X1-Z1, чтобы располагать ее параллельно поверхности S. Штанга 2 оснащена измерителем 7 угла наклона, который измеряет угол . Первый домкрат 3 соединен с блоком 5 управления при помощи проводной линии 50 связи, которая позволяет блоку 5 управления управлять первым домкратом 3. Второй домкрат 30 соединен с блоком 5 управления через проводную линию 50' связи, которая позволяет блоку 5 управления управлять вторым домкратом 30. Агрегат 1 оборудован также системой ручного управления вторым домкратом 30. Эта система ручного управления содержит, например, вторую ручку 38', находящуюся в кабине агрегата 1 вблизи руля 11. Вторая ручка 38' соединена со вторым домкратом 30 через проводную линию 51' связи. В варианте линии связи 50, 50', 51 и 51' являются беспроводными. Кабина агрегата 1 выполнена таким образом, что пользователь может одновременно управлять средствами перемещения агрегата 1 при помощи руля 11 и системами ручного управления первым домкратом 3 и вторым домкратом 30, т.е. ручками 38 и 38'. Далее следует описание первого способа распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата 1. Этот способ содержит первоначальный этап а), на котором до опрыскивания пользователь вводит в блок 5 управления значение минимального расстояния dmin и значение максимального расстояния dmax,превышающего минимальное расстояние dmin. Минимальное расстояние dmin может составлять от 30 до 70 см, предпочтительно примерно равно 50 см. Максимальное расстояние dmax может составлять от 70 до 150 см, предпочтительно примерно равно 100 см. Первый способ содержит предварительный этап b), который можно осуществлять до или после высадки растений на участке. На предварительном этапе b) до того, как агрегат 1 начнет распыление фитосанитарной жидкости на растения, или во время предыдущего опрыскивания агрегат 1 проходит по участку со скоростью V1, предпочтительно достаточно низкой, по заданной траектории Т таким образом,чтобы штанга 2 отсканировала всю поверхность S участка, на которой посажены или будут высажены растения. Одновременно во время предварительного этапа b) пользователь манипулирует на всей траектории Т точно и не спеша системой 38 ручного управления домкратом 3 и системой 38' ручного управления вторым домкратом 30 таким образом, чтобы расстояние d между каждым датчиком 6 и поверхностью S или растениями, высаженными на участке, находилось в пределах между минимальным расстоянием dmin и максимальным расстоянием dmax. Предпочтительно пользователь манипулирует системами 38 и 38' управления таким образом, чтобы расстояние d между каждым датчиком 6 и поверхностью S или растениями, высаженными на участке, было, по существу, равно оптимальному расстоянию dopt. Оптимальное расстояние dopt обеспечивает оптимальное распыление. Оптимальное расстояние dopt может составлять от 50 до 100 см и предпочтительно равно примерно 70 см. Предпочтительно предварительный этап b) можно осуществлять, когда агрегат 1 перемещается на низкой первой скорости V1, т.е. на скорости, позволяющей пользователю точно управлять домкратом 3. Во время предварительного этапа b) для выборочных положений агрегата 1 вдоль траектории Т блок 5 управления сохраняет в своей памяти 52, с одной стороны, расстояние d между каждым датчиком 6 и поверхностью S или растениями и, с другой стороны,по меньшей мере одну данную, касающуюся наклона штанги 2. Например, эту операцию можно осуществлять каждые 50 см вдоль траектории Т агрегата. Данной или данными о наклоне штанги 2 могут быть угол , измеренный измерителем 7 угла наклона, угол коррекции 8, измеренный датчиком 70, и/или длина L103, измеренная системой 103 измерения. Факультативно, во время предварительного этапа b) для выборочных положений агрегата 1 вдоль траектории Т блок 5 управления сохраняет в своей памяти 52 длину L103, соответствующую конфигурации первого домкрата 3. Точно так же, факультативно, во время предварительного этапа b) для выборочных положений агрегата 1 вдоль траектории Т блок 5 управления сохраняет в своей памяти 52 длину L130, соответствующую конфигурации второго домкрата 30. Предпочтительно, но не ограничительно во время предварительного этапа , как только расстояниеd, измеряемое по меньшей мере одним датчиком 6, оказывается меньше минимального расстояния dmin,блок 5 управления автоматически управляет вторым домкратом 30 для удаления штанги 2 от поверхности S, пока расстояние d, измеряемое каждым датчиком 6, не станет больше или равным оптимальному расстоянию dopt. Это управление происходит приоритетно, т.е. подъем штанги 2 происходит, даже если пользователь управляет вручную домкратами 3 и 30. Действительно, это управление позволяет избежать столкновения между штангой и землей, что является первостепенной задачей. Точно так же, предпочтительно, но не ограничительно во время первоначального этапа а) пользователь вводит в блок 5 управления значение оптимального расстояния dopt, находящееся в пределах между минимальным расстояниемdmin и максимальным расстоянием dmax. Во время предварительного этапа b) блок 5 управления автоматически управляет первым домкратом 3 и/или вторым домкратом 30 таким образом, чтобы расстояние d,измеряемое каждым датчиком 6, было, по существу, равно оптимальному расстоянию dopt. Кроме того, во время предварительного этапа b) пользователь может использовать ручки 38 и 38',чтобы по мере необходимости корректировать действия управления блока 5 управления. По завершении предварительного этапа b) память 52 блока 5 управления в зависимости от выборочных положений агрегата 1 сохранила угол , расстояние d между каждым датчиком 6 и землей или растениями и, в случае необходимости, длины L103 и L130. На этапе распыления с), следующем за этапом b), и во время распыления фитосанитарной жидкости штангой 2 агрегат 1 проходит по поверхности S растений на второй скорости V2, превышающей или равной первой скорости V1, на траектории Т, выбранной во время предварительного этапа b). В идеале,траектория Т, проходимая агрегатом 1 во время этапа распыления с), является точно такой же, что и траектория Т, выбранная во время предварительного этапа b). На практике, две траектории могут слегка различаться. На этапе распыления с) для каждого положения, выбранного на предварительном этапе b), и в зависимости от данных d и , 8 и/или L103 и, возможно, L130, определенных датчиками 6 и измерителем 7 угла наклона, датчиком 70 и/или системой 103 измерения и, возможно, системой 130 измерения на предварительном этапе b), блок 5 управления автоматически управляет первым домкратом 3 и вторым домкратом 30 таким образом, чтобы расстояние d между каждым датчиком 6 и землей или растениями находилось в пределах между минимальным расстоянием dmin и максимальным расстоянием dmax, установленными во время первоначального этапа а). Во время этапа распыления с) блок 5 управления предпочтительно, но не ограничительно может управлять первым домкратом 3 и/или вторым домкратом 30 таким образом, чтобы для каждого положения, выбранного во время предварительного этапа b), наклон а штанги 2 был аналогичен наклону , установленному вручную пользователем во время предварительного этапа b). Предпочтительно, но не ограничительно во время этапа распыления с) блок 5 управления может управлять первым домкратом 3 и вторым домкратом 30 таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), расстояние d, измеряемое каждым датчиком 6, было, по существу, равно ранее определенному оптимальному расстоянию dopt. Во всех случаях расстояние d, измеряемое каждым датчиком 6, находится в пределах между минимальным расстоянием dmin и макси-6 022079 мальным расстоянием dmax. Предпочтительно блок 5 управления запрограммирован для управления первым домкратом 3 и вторым домкратом 30 с упреждением, т.е. слегка опережая ближайшее выбранное положение таким образом, чтобы штанга 2 наклонялась на скорости, не приводящей к нарушениям стабильности. Например, во время этапа распыления с), когда агрегат 1 находится в одном положении, выбранном во время предварительного этапа b), блок 5 управления может подать команду на начало поступательного движения штока 32 или 302 первого или второго домкрата 3 или 30 и постепенно поступательно перемещать этот шток, пока агрегат на придет в следующее выбранное положение. В частности, зная конфигурацию домкратов 3 и 30, соответствующую длинам L103 и L130, блок 5 управления может во время следующего выбранного положения упредить изменения геометрии участка,основываясь также на данных d,и/или 8, определенных датчиками 6 и измерителем 7 угла наклона 7 и/или датчиком 70 во время предварительного этапа b), что позволяет блоку 5 управления на этапе распыления с) управлять перемещением штоков 32 и 302 домкратов 3 и 30 на скорости, не приводящей к появлению паразитных движений штанги 2 по причине инерции. Далее следует описание второго способа распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата 1. Этот второй способ содержит первоначальный этап а 2), на котором до опрыскивания пользователь вводит в блок 5 управления значение минимального расстоянияdmin и значение оптимального расстояния dopt. На предварительном этапе b2), следующем после первоначального этапа а 2), агрегат 1 проходит поверхность S участка на первой скорости V1 по определенной траектории Т таким образом, чтобы штанга 2 отсканировала всю поверхность S. Как только расстояниеd, измеряемое по меньшей мере одним датчиком 6, оказывается меньше минимального расстояния dmin,введенного во время первоначального этапа а 2), блок 5 управления управляет вторым домкратом 30, пока расстояние d, измеряемое этим датчиком 6, не станет равным оптимальному расстоянию dopt. Пользователь манипулирует системой 38 ручного управления первым домкратом 3 таким образом, чтобы расстояние d, измеряемое каждым датчиком 6, было в основном равно оптимальному расстоянию dopt. Каждый раз, когда пользователь приводит в действие систему 38 ручного управления первым домкратом 3,блок 5 управления сохраняет в своей памяти положение агрегата 1 вдоль траектории Т и либо продолжительность этого приведения в действие, либо расстояние, пройденное агрегатом 1 во время этого приведения в действие, и несколько секунд после завершения этого приведения в действие, - первую данную, 8 или L103, связанную с наклоном плеча 2 а, соответствующего системе 38 ручного управления, задействованной пользователем. На этапе распыления с), следующем за предварительным этапом b2), и во время распыления агрегат 1 проходит по поверхности S на второй скорости V2, превышающей или равной первой скорости V1, по траектории Т, выбранной во время предварительного этапа b2). Сохранение одинаковой скорости V1 иV2 позволяет координировать влияние инерции штанги 2. Когда агрегат 1 приходит в положения, сохраненные в памяти во время предварительного этапа b2), блок 5 управления управляет первым домкратом 3, приведенным в действие для этого положения пользователем на предварительном этапе b2), либо в течение времени, равного соответствующей продолжительности приведения в действие, сохраненной в памяти во время предварительного этапа b2), либо пока агрегат 1 не пройдет расстояние, равное соответствующему расстоянию, пройденному во время предварительного этапа b2). Несколько секунд спустя после завершения приведения в действие блок 5 управления сравнивает вторую данную , 8 или L103,касающуюся наклона соответствующего плеча 2 а, с первой соответствующей данной , 8 или L103,сохраненной в памяти во время предварительного этапа b2), и, если вторая данная , 8 или L103 отличается на плюс или минус 1% от первой данной, блок 5 управления управляет первым домкратом 3 в сторону уменьшения разности между второй данной , 8 или L103 и первой данной , 8 или L103. Это управление может происходить последовательными импульсами. Фиг. 3 соответствует второму варианту выполнения изобретения, в котором агрегат 2 оборудован распылительной штангой 2, которая содержит три шарнирных плеча 2 а, 2b и 2 с. На фиг. 3 элементы, подобные элементам на фиг. 1, обозначены такими же цифровыми позициями, к которым может быть добавлена буква "а" в случае, если элемент относится к плечу 2 а, или буква "b", если элемент относится к плечу 2b, или буква "с", если элемент относится к плечу 2 с. Плечо 2 а центровано по оси Z1 и находится между плечом 2b и плечом 2 с. Плечо 2 а образует "центральную раму" для штанги 2. Позицией Х 2 а обозначена продольная ось центральной рамы 2 а, Х 2b обозначает продольную ось плеча 2b, и Х 2 с обозначает продольную ось плеча 2 с. Центральная рама 2 а штанги 2 соединена с агрегатом 1 при помощи конструкции, похожей на конструкцию, описанную для первого варианта выполнения. Эта конструкция содержит первый домкрат 3a,который соответствует домкрату 3, показанному на фиг. 1, шатун 8, ползун 9, две направляющие 11 и 11' и второй домкрат 30. Домкрат 3a обеспечивает наклон центральной рамы 2 а относительно шасси 12 агрегата 1 вокруг оси Y2 в плоскости X2a-Z1, перпендикулярной оси Y2. Обозначением a показан угол, находящийся со стороны плеча 2 с относительно оси Z1 и образованный в плоскости X2a-Z1 между осями Х 2 а и Z1. На фиг. 1 угол a находится в верхнем правом квадранте. Плоскость X2a-Z1 проходит через оси Х 2 а и Z1 и перпендикулярна направлению движения Y1 агрегата 1. Факультативно, штанга 2 оборудована не показанным датчиком, аналогичным датчику 70 агрегата 1 согласно первому варианту выполнения, для измерения угла коррекции, аналогичного углу 8 и образованного между шатуном 8 и продольной осью Х 2 а центральной рамы 2 а. Плечо 2b шарнирно соединено с первым осевым концом 24 центральной рамы 2 а с возможностью поворота вокруг оси Yb, параллельной оси Y1. Для этого центральная рама 2 а имеет элемент 21, который взаимодействует с элементом 21b, закрепленным на уровне первого конца 24 плеча 2b, образуя шарнир. Агрегат 1 оборудован домкратом 3b, первый конец которого шарнирно соединен с плечом 2b с возможностью поворота вокруг оси Y3b и второй конец которого шарнирно соединен с центральной рамой 2 а с возможностью поворота вокруг оси Y2b. Оси Y2b и Y3b параллельны оси Y1. Факультативно, штанга 2 оборудована не показанным датчиком для измерения угла, называемого углом геометрии, образованного между продольной осью Х 2b плеча 2b и продольной осью Х 2 а центральной рамы 2 а.Zb обозначает первую опорную ось, неподвижную относительно шасси 12 агрегата 1 и параллельную оси Z1. На фиг. 3 ось Zb совпадает с осями Yb и Y2b. Однако, когда штанга 2 наклоняется, ось Zb больше не проходит через оси Yb и Y2b. Плечо 2 с шарнирно соединено со вторым осевым концом 26 центральной рамы 2 а с возможностью поворота вокруг оси Yc, параллельной оси Y1. Для этого центральная рама 2 а имеет дополнительный элемент 21, который взаимодействует с элементом 21 с, закрепленным на уровне первого конца 24 плеча 2 с, образуя шарнир. Агрегат 1 оборудован дополнительным домкратом 3c, первый конец которого шарнирно соединен с плечом 2 с с возможностью поворота вокруг оси Y3c и второй конец которого шарнирно соединен с центральной рамой 2 а с возможностью поворота вокруг оси Y2c. Факультативно, штанга 2 оборудована не показанным датчиком для измерения угла, называемого углом геометрии, образованного между продольной осью Х 2 с плеча 2 с и продольной осью Х 2 а центральной рамы 2 а.Zc обозначает вторую опорную ось, неподвижную относительно шасси 12 агрегата 1 и параллельную оси Z1. На фиг. 3 ось Zc совпадает с осями Yc и Y2c. Однако, когда штанга 2 наклоняется, ось Zc больше не проходит через оси Yc и Y2c. Непоказанные датчики измерения углов коррекции и геометрии соединены с блоком 5 управления при помощи не показанных линий проводной или беспроводной связи и позволяют измерять, каждый,данную, касающуюся наклона плеч 2 а, 2b и 2 с. Угол коррекции и углы геометрии являются величинами, каждая из которых соответствует конфигурации домкрата 3, 3a, 3b или 3c аналогично величинам L103 и L130. Поступательное перемещение штока домкрата 3b или 3c приводит к наклону плеча 2b или 2 с в плоскости X2a-Z1 вокруг оси Yb или Yc относительно опорной оси Zb или Zc и, следовательно, относительно оси Z1. Домкраты 3a, 3b и 3c позволяют наклонять плечи 2 а, 2b и 2 с относительно шасси 12 агрегата 1. Позиция b обозначает угол, находящийся со стороны плеча 2b относительно оси Zb и образованный в плоскости X2a-Z1 между осями Zb и Х 2b. Позицией с обозначен угол, находящийся со стороны плеча 2 с относительно оси Zc и образованный в плоскости X2a-Z1 между осями Zc и Х 2 с. В конфигурации, показанной на фиг. 3, углы a, b и с равны 90. Углы b и с соответствуют наклону плеч 2b и 2 с в плоскости Х 2 а-Z1. В варианте угол а образован между осями Х 2 а и Zg, угол b образован между осями Х 2b и Zg, и угол с образован между осями Х 2 с и Zg. В не показанном варианте агрегат 1 содержит по меньшей мере для одного из плеч 2 а, 2b и/или 2 с штанги 2 орган наклона этого плеча или этих плеч 2 а, 2b и/или 2 с в плоскости X2a-Z1, т.е. по меньшей мере одно плечо 2 а, 2b или 2 с может не содержать органа наклона. Каждое плечо 2 а, 2b и 2 с оснащено двумя датчиками 6 а, 6b или 6 с, которые находятся на уровне каждого осевого конца 24, 26 плеч 2 а, 2b или 2 с и измеряют, каждый, свое расстояние d, как показано на фиг. 1. В не показанном варианте по меньшей мере одно из плеч 2 а, 2b и/или 2 с штанги 2 оборудовано датчиком 6 а, 6b или 6 с, т.е. по меньшей мере одно плечо штанги 2 может не содержать датчика. Агрегат 1 оборудован системой ручного управления домкратами 3a, 3b и 3c, которая позволяет пользователю раздельно управлять домкратами 3a, 3b и 3c. Эта система ручного управления содержит первую ручку 38 а, вторую ручку 38b и третью ручку 38 с. Первая ручка 38 а соединена с домкратом 3 а через проводную линию 50 а связи, которая позволяет пользователю управлять вручную наклоном центральной рамы 2 а, т.е. изменять угол а. Вторая ручка 38b соединена с домкратом 3b через проводную линию 50b связи, которая позволяет пользователю управлять вручную наклоном плеча 2b, т.е. изменять угол b. Третья ручка 38 с соединена с домкратом 3c через проводную линию 50 с связи, которая позволяет пользователю управлять вручную наклоном плеча 2 с, т.е. изменять угол с. Агрегат 1 оборудован системой 38' ручного управления домкратом 30, которая содержит ручку 38',соединенную с домкратом 30 через проводную линию 51' связи. Линии связи 50 а, 50b, 50 с и 51' могут быть линиями беспроводной связи. Агрегат 1 оборудован блоком 5 управления, который содержит память 52 и соединен с домкратом 30 при помощи проводной линии 50' связи. Каждый датчик 6 а, 6b и 6 с соединен с блоком 5 управления через не показанные проводные линии связи. Эти линии связи могут быть также беспроводными. Каждое плечо 2 а и 2b оборудовано измерителем 7 а, 7b или 7 с угла наклона a, b или с и двумя датчиками 6a, 6b или 6c, каждый из которых измеряет расстояние d аналогично расстоянию d в варианте выполнения, показанном на фиг. 1. В не показанном варианте по меньшей мере одно из плеч 2 а, 2b и/или 2 с штанги 2 оборудовано измерителем 7 а, 7b или 7 с угла наклона, т.е. по меньшей мере одно из плеч штанги 2 может не содержать измерителя угла наклона. Каждый датчик 6 а, 6b и 6 с и каждый измеритель 7 а, 7b и 7 с угла наклона соединен с блоком 5 управления при помощи не показанных линий проводной связи. Эти линии связи могут быть также беспроводными. Первый способ распыления фитосанитарной жидкости при помощи агрегата 1 согласно второму варианту выполнения похож на способ, описанный для первого варианта выполнения. Однако во время предварительного этапа b) пользователь управляет по всей траектории системой 38 а, 38b и 38 с ручного управления каждым домкратом 3a, 3b и 3c. Кроме того, во время предварительного этапа b) для выбранных положений агрегата 1 на поверхности растений блок 5 управления сохраняет в своей памяти 52 расстояние d, измеренное каждым датчиком 6 а, 6b и 6 с, и по меньшей мере одну данную, касающуюся наклона каждого плеча 2 а, 2b и 2 с штанги 2. Данная или данные, связанные с наклоном каждого плеча 2 а, 2b и 2 с штанги 2, могут быть углами a, b и с, углами геометрии, углом коррекции и/или величинами, соответствующими конфигурации домкратов 3a, 3b и 3c. Этап распыления с) согласно второму варианту аналогичен этапу распыления с) согласно первому варианту. Однако блок 5 управления управляет раздельно каждым домкратом 3a, 3b и 3c, а также вторым домкратом 30. Второй способ распыления фитосанитарной жидкости при помощи агрегата 1 согласно второму варианту выполнения аналогичен способу, описанному для первого варианта выполнения. Однако во время предварительного этапа b2) пользователь манипулирует каждой ручкой 38 а, 38b и 38 с для управления наклоном каждого плеча 2 а, 2b и 2 с, и блок 5 управления сохраняет в своей памяти 52 данную a, b, с,касающуюся наклона каждого плеча 2 а, 2b и 2 с. Кроме того, во время этапа распыления с 2) блок 5 управления управляет плечами 2 а, 2b и 2 с, соответствующими плечам 2 а, 2b и 2 с, которыми управлял пользователь во время предварительного этапа b2), в зависимости от данных a, b, с, касающихся наклона плеч 2 а, 2b и 2 с. В других, не показанных вариантах выполнения число и расположение датчиков 6, 6a, 6b и 6c на штанге 2 может меняться. Точно так же, каждое плечо 2 а, 2b и 2 с штанги 2 может содержать измерители угла наклона в количестве более 1. Кроме того, штанга 2 может иметь переменное число плеч. Например, с каждой стороны от центральной рамы 2 а штанга 2 может содержать два плеча, шарнирно соединенные друг с другом. В не показанном варианте штанга 2 и плечи 2 а, 2b и 2 с штанги 2 наклоняются вокруг оси, которая не является параллельной направлению движения Y1 агрегата 1. Так, штанга 2 и плечи 2 а, 2b и 2 с штанги 2 могут быть выполнены с возможностью поворота вокруг оси, которая имеет наклон относительно направления движения Y1. В этом случае поворот штанги 2 и плеч 2 а, 2b и 2 с не происходит в плоскостиX1-Z1 или в плоскости X2a-Z1. С другой стороны, представленные органы наклона 3, 3a, 3b, 3c штанги, орган 30 подъема/опускания и средства крепления штанги 2 на агрегате 1 не являются ограничительными, и изобретение можно применять для агрегатов, которые отличаются от тракторов, показанных на фигурах. Например, орган 30 подъема/опускания может быть органом типа двойного деформируемого параллелограмма. Кроме того, представленные варианты выполнения не являются ограничительными, и их отличительные признаки можно комбинировать. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Сельскохозяйственный агрегат (1) для распыления фитосанитарной жидкости на обрабатываемом участке, включающий в себя средства (10, 11) перемещения агрегата (1) по поверхности (S) участка; штангу (2) со средствами (22) для распыления фитосанитарной жидкости, содержащую по меньшей мере одно плечо (2 а, 2b, 2 с); орган (3, 3a, 3b, 3c) наклона по меньшей мере одного из плеч (2 а, 2b, 2 с) по отношению к шасси (12) сельскохозяйственного агрегата (1); орган (30) подъема/опускания штанги (2) вдоль первой оси (Z1), неподвижной относительно шасси(12) агрегата и вертикальной или по существу вертикальной, когда агрегат (1) опирается на плоскую горизонтальную поверхность (S), или относительно второй оси (Zg) того же направления, что и направление силы тяжести; систему (38, 38 а, 38b, 38 с) ручного управления каждым органом (3, 3a, 3b, 3c) наклона и органом(30) подъема/опускания; приемник (4), выполненный с возможностью связи с системой геолокализации; и блок (5) управления,при этом по меньшей мере одно из плеч (2 а, 2b, 2 с) штанги (2) оснащено по меньшей мере одним датчиком (6, 6 а, 6b, 6c), при этом каждый датчик (6, 6 а, 6b, 6c) измеряет расстояние (d) между поверхностью (S) обрабатываемого участка и этим датчиком (6, 6a, 6b, 6 с) или, в случае необходимости, между растениями, посаженными на участке, и этим датчиком (6, 6 а, 6b, 6c),отличающийся тем, что по меньшей мере одно из плеч (2 а, 2b, 2 с) штанги (2) оснащено элементом(7, 7 а, 7b, 7 с, 70, 103) измерения величины (, a, b, c, 8, L103) наклона продольной оси (Х 2, Х 2 а,Х 2b, Х 2 с) плеча (2 а, 2b, 2 с) в плоскости (X1-Z1; X2a-Z1), перпендикулярной направлению движения (Y1) агрегата (1), при этом блок (5) управления соединен с каждым датчиком (6, 6 а, 6b, 6 с), с приемником (4) и с измерительным элементом (7, 7 а,7b, 7 с, 70, 103); имеет устройство памяти (52) для сохранения данных, поступающих от каждого датчика (6, 6 а, 6b,6c), от приемника (4) и от каждого измерительного элемента (7, 7 а, 7b, 7 с, 70, 103); и выполнен с возможностью управления каждым органом (3, 3a, 3b, 3c) наклона и органом (30) подъема/опускания в зависимости от величин (, a, b, c, 8, L103), сохраненных в устройстве памяти(52). 2. Агрегат (1) по п.1, отличающийся тем, что по меньшей мере один орган (3, 3a, 3b, 3c) наклона и/или орган (30) подъема/опускания содержит гидравлический или электрический домкрат. 3. Агрегат (1) по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере одно из плеч (2 а, 2b, 2 с) штанги (2) оборудовано двумя датчиками (6, 6a, 6b, 6c). 4. Агрегат (1) по одному из предыдущих пунктов, отличающийся тем, что орган (30) подъема/опускания и/или по меньшей мере один орган (3, 3a, 3b, 3c) наклона оборудованы системой (103, 130,70) измерения величины (L103, L130, 8), соответствующей конфигурации этого или этих органов (3, 3a,3b, 3c, 30). 5. Способ распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата (1) по одному из предыдущих пунктов, отличающийся тем, что включает первоначальный этап а), на котором до опрыскивания пользователь вводит в блок (5) управления значение минимального расстояния (dmin) между датчиком (6, 6a, 6b, 6c) и обрабатываемой поверхностью(S) участка или растениями и значение максимального расстояния (dmax), превышающего минимальное расстояние (dmin); предварительный этап b), на котором агрегат (1) проходит по поверхности (S) участка на первой скорости (V1) по определенной траектории (Т) таким образом, что штанга (2) сканирует всю поверхность (S), при этом пользователь манипулирует на всей траектории (Т) системой (38, 38 а, 38b, 38 с) ручного управления каждым органом (3, 3a, 3b,3c) наклона и/или системой (38') ручного управления органом (30) подъема/опускания таким образом,чтобы расстояние (d) между каждым датчиком (6, 6a, 6b, 6c) и поверхностью (S) или растениями находилось в пределах между максимальным расстоянием (dmax) и минимальным расстоянием (dmin),для выборочных положений агрегата (1) вдоль траектории (Т) блок (5) управления сохраняет в устройстве памяти (52), с одной стороны, расстояние (d) между каждым датчиком (6, 6 а, 6b, 6c) и землей или растениями и, с другой стороны, по меньшей мере одну величину (, a, b, с, 8, L103) наклона каждого плеча (2 а, 2b, 2 с); этап распыления с), следующий за этапом b), на котором во время опрыскивания агрегат (1) проходит по обрабатываемой поверхности (S) на второй скорости (V2), превышающей или равной первой скорости (V1), по траектории (Т), выбранной на предварительном этапе b), и для каждого положения, выбранного на предварительном этапе b) и в зависимости от сохраненных в устройстве памяти (52) данных (, a, b, с, 8, L103), блок (5) управления управляет с упреждением органом (30) подъема/опускания и каждым органом (3, 3a, 3b, 3c) наклона таким образом, чтобы расстояние (d) между каждым датчиком (6, 6a, 6b, 6c) и поверхностью (S) или растениями находилось в пределах между максимальным расстоянием (dmax) и минимальным расстоянием (dmin). 6. Способ по п.5, отличающийся тем, что во время этапа распыления с) блок (5) управления управляет с упреждением каждым органом (3, 3a, 3b, 3c) наклона таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), наклон (, 8, a, b, с) каждого плеча (2 а, 2b, 2 с) был подобен наклону (, 8, a, b, с) каждого плеча (2 а, 2b, 2 с), определенному пользователем на предварительном этапе b). 7. Способ по одному из пп.5 или 6 при помощи агрегата по п.4, отличающийся тем, что во время предварительного этапа b) для выборочных положений агрегата (1) вдоль траектории (Т) блок (5) управления сохраняет в устройстве памяти (52) по меньшей мере одну величину (L103, L130, 8), соответствующую конфигурации органа (30) подъема/опускания и/или по меньшей мере одного органа (3, 3a, 3b,3c) наклона, и тем, что во время этапа распыления с) для каждого положения, выбранного на предварительном этапе b), блок (5) управления автоматически и с упреждением управляет органом (30) подъема/опускания и/или по меньшей мере одним органом (3, 3a, 3b, 3c) наклона таким образом, чтобы каждая величина (L103, L130, 8) была равна величинам (L103, L130, 8), сохраненным в устройстве памяти во время предварительного этапа b). 8. Способ по одному из пп.5-7, отличающийся тем, что во время первоначального этапа а) пользователь вводит в блок (5) управления значение оптимального расстояния (dopt), находящегося в пределах между минимальным расстоянием (dmin) и максимальным расстоянием (dmax), и тем, что во время этапа распыления с) блок (5) управления управляет автоматически и с упреждением каждым органом (3, 3a, 3b,3c) наклона и органом (30) подъема/опускания таким образом, чтобы для каждого положения, выбранного на предварительном этапе b), расстояние (d), измеряемое каждым датчиком (6, 6 а, 6b, 6c), было, по существу, равно оптимальному расстоянию (dopt). 9. Способ по одному из пп.5-8, отличающийся тем, что во время первоначального этапа а) пользователь вводит в блок (5) управления значение оптимального расстояния (dopt), находящегося в пределах между минимальным расстоянием (dmin) и максимальным расстоянием (dmax), и во время предварительного этапа b), как только расстояние (d), измеряемое по меньшей мере одним датчиком (6, 6a, 6b, 6 с), становится меньше минимального расстояния (dmin), блок (5) управления управляет автоматически и приоритетно органом (30) подъема/опускания для удаления штанги (2) от поверхности (S), пока расстояние(d), измеряемое каждым датчиком (6, 6 а, 6b, 6 с), не станет больше или равным оптимальному расстоянию (dopt). 10. Способ по одному из пп.5-9, отличающийся тем, что во время первоначального этапа а) пользователь вводит в блок (5) управления значение оптимального расстояния (dopt), находящегося в пределах между минимальным расстоянием (dmin) и максимальным расстоянием (dmax), и во время предварительного этапа b) блок (5) управления управляет автоматически органом (30) подъема/опускания и органом и/или по меньшей мере одним органом (3, 3a, 3b, 3c) наклона таким образом, чтобы расстояние (d), измеряемое каждым датчиком (6, 6a, 6b, 6c), было, по существу, равно оптимальному расстоянию (dopt), при этом пользователь управляет системой (38') ручного управления органом (30) подъема/опускания и/или системой (38, 38 а, 38b, 38 с) ручного управления каждым органом (3, 3a, 3b, 3c) наклона, чтобы корректировать действия управления блока (5) управления. 11. Способ распыления фитосанитарной жидкости на растения, высаженные на участке, при помощи агрегата (1) по одному из пп.1-4, отличающийся тем, что включает первоначальный этап а 2), на котором до опрыскивания пользователь вводит в блок (5) управления значение минимального расстояния (dmin) и значение оптимального расстояния (dopt), превышающего минимальное расстояние (dmin); предварительный этап b2), который следует за первоначальным этапом а 2) и на котором агрегат (1) проходит по поверхности (S) участка на первой скорости (V1) по определенной траектории (Т) таким образом, чтобы штанга (2) сканировала всю поверхность (S),как только расстояние (d), измеряемое по меньшей мере одним датчиком (6, 6 а, 6b, 6 с), становится меньше минимального расстояния (dmin), введенного на первоначальном этапе а 2), блок (5) управления управляет органом (30) подъема/опускания, пока расстояние (d), измеряемое этим или этими датчиками(6, 6a, 6b, 6 с), не станет равным оптимальному расстоянию (dopt),пользователь манипулирует системой (38, 38 а, 38b, 38 с) ручного управления каждым органом (3,3a, 3b, 3c) наклона таким образом, чтобы расстояние (d), измеряемое каждым датчиком (6, 6 а, 6b, 6c), в основном было равно оптимальному расстоянию (dopt),каждый раз, когда пользователь приводит в действие систему (38, 38 а, 38b, 38 с) ручного управления органом (3, 3a, 3b, 3c) наклона, блок (5) управления сохраняет в устройстве памяти (52) положение агрегата (1) вдоль траектории (Т) и либо продолжительность этого приведения в действие, либо расстояние, пройденное агрегатом (1) во время этого приведения в действие, спустя несколько секунд после за- 11022079 вершения этого приведения в действие блок (5) управления сохраняет в устройстве памяти (52) первую величину (, a, b, c, 8, L103) наклона плеча (2 а, 2b, 2 с), соответствующего задействованной системе(38, 38 а, 38b, 38 с) ручного управления; этап распыления с 2), который следует за этапом b2) и на котором во время опрыскивания агрегат (1) проходит по поверхности (S) на второй скорости (V2), превышающей или равной первой скорости (V1), по траектории (Т), выбранной на предварительном этапе b2), и когда агрегат (1) достигает одного из положений, сохраненных в устройстве памяти на предварительном этапе b2), блок (5) управления управляет органом (3, 3a, 3b, 3c) наклона, приведенным в действие для этого положения пользователем на предварительном этапе b2), либо в течение времени, равного соответствующей продолжительности приведения в действие, сохраненной в устройстве памяти на предварительном этапе b2), либо пока агрегат (1) не пройдет расстояние, равное соответствующему расстоянию, пройденному во время предварительного этапа b2), и несколько минут спустя после завершения приведения в действие блок (5) управления сравнивает вторую величину (, a, b, c, 8, L103) наклона соответствующего плеча (2 а, 2b, 2 с) с соответствующей первой величиной (, a, b, с, 8, L103),сохраненной в памяти на предварительном этапе b2), и, если вторая величина (, a, b, c, 8, L103) отличается 1% от первой величины (, a, b, c, 8, L103), блок (5) управления управляет этим органом (3, 3a, 3b, 3 с) наклона в сторону уменьшения разности между второй величиной (, a, b, c, 8,L103) и первой величиной (, a, b, c, 8, L103). 12. Способ по одному из пп.5-11, отличающийся тем, что минимальное расстояние (dmin) составляет от 30 до 70 см, предпочтительно примерно равно 50 см. 13. Способ по одному из пп.5-10, отличающийся тем, что максимальное расстояние (dmax) составляет от 70 до 150 см, предпочтительно примерно равно 100 см. 14. Способ по одному из пп.8-13, отличающийся тем, что оптимальное расстояние (dopt) составляет от 50 до 100 см, предпочтительно примерно равно 70 см.
МПК / Метки
МПК: A01M 7/00
Метки: агрегата, фитосанитарной, способ, помощи, обрабатываемом, распыления, жидкости, такого, сельскохозяйственный, участке, агрегат, распылительный
Код ссылки
<a href="https://eas.patents.su/14-22079-selskohozyajjstvennyjj-raspylitelnyjj-agregat-i-sposob-raspyleniya-fitosanitarnojj-zhidkosti-na-uchastke-obrabatyvaemom-pri-pomoshhi-takogo-agregata.html" rel="bookmark" title="База патентов Евразийского Союза">Сельскохозяйственный распылительный агрегат и способ распыления фитосанитарной жидкости на участке, обрабатываемом при помощи такого агрегата</a>
Способ возделывания сельскохозяйственных культур и сельскохозяйственный агрегат для его осуществления
Номер патента: 20492
Опубликовано: 28.11.2014
Авторы: Болгар Петр, Болгар Дмитрий
МПК: A01B 49/06, A01D 41/02, A01D 91/04...
Метки: способ, сельскохозяйственный, сельскохозяйственных, агрегат, возделывания, культур, осуществления
Формула / Реферат:
1. Способ возделывания сельскохозяйственных культур, включающий прямой посев с закрытием посевной борозды, внесение удобрений, обработку пестицидами, уборку урожая, разделение товарной и нетоварной доли урожая, измельчение нетоварной доли урожая и ее равномерное распределение по поверхности поля, отличающийся тем, что уборку урожая, разделение товарной и нетоварной доли урожая, измельчение нетоварной доли урожая и ее равномерное распределение по...
Способ селективно-рециркуляционного распыления жидкости и устройство для его осуществления (варианты)
Номер патента: 16533
Опубликовано: 30.05.2012
Автор: Надмитов Сергей Викторович
Метки: варианты, способ, устройство, распыления, осуществления, селективно-рециркуляционного, жидкости
Формула / Реферат:
1. Способ селективно-рециркуляционного распыления жидкости заключается в одновременном осуществлении процессов распыления жидкости и селекции (отбора) частиц заданных размеров из факела распыления; распыление жидкости осуществляют путем подачи струи жидкости через распыляющее сопло под углом к потоку газа; процесс селекции (отбора) частиц заданного размера из факела распыления осуществляют сборником частиц распыленной жидкости, установленным на...
Трубопровод для транспортировки жидкости, содержащей углеводород, и способ производства такого трубопровода
Номер патента: 21861
Опубликовано: 30.09.2015
Авторы: Бижэ Тибо, Вуарен Жером
МПК: F16L 1/20, F16L 53/00, F16L 9/04...
Метки: производства, способ, трубопровод, углеводород, содержащей, такого, трубопровода, транспортировки, жидкости
Формула / Реферат:
1. Трубопровод для транспортировки жидкости, содержащей углеводород, при этом трубопровод включает в себяполую внутреннюю трубу (2), проходящую в продольном направлении (X) и предназначенную для транспортировки вышеупомянутой жидкости во внутренней трубе, причем вышеупомянутая внутренняя труба (2) имеет по меньшей мере одну электроизоляционную внешнюю поверхность (2b);нагревательный слой (3), расположенный на внутренней трубе и содержащий...
Сварочный агрегат для сварки рельсов пути
Номер патента: 19619
Опубликовано: 30.05.2014
Авторы: Лихтбергер Бернхард, Мюллайтнер Хайнц, Тойрер Йозеф
МПК: B23K 11/00, E01B 29/46
Метки: пути, агрегат, рельсов, сварочный, сварки
Формула / Реферат:
1. Сварочный агрегат для сварки рельсов (7) пути, содержащий первую и вторую части агрегата (4), с которыми связаны зажимные приводы (5), имеющие каждый поршневой шток (18), при этом обе части агрегата могут посредством подвижных цилиндров (2) сдвигаться друг к другу вдоль проходящих параллельно рельсам (7) направляющих (3) агрегата, и содержащий связанную с направляющими (3) агрегата и подвижными цилиндрами (2) поперечную балку (12), а также...
Сварочный агрегат для сварки двух рельсов пути и способ сварки
Номер патента: 8316
Опубликовано: 27.04.2007
Автор: Мюллайтнер Хайнц
МПК: C21D 9/50, E01B 11/50
Метки: сварочный, пути, сварки, двух, агрегат, способ, рельсов
Формула / Реферат:
1. Сварочный агрегат (1) для сварки двух рельсов (2) пути (3), состоящий из устройства (5) управления, двух половин (4), установленных с возможностью перемещения посредством обжимных цилиндров (7) в продольном направлении (6) рельсов и содержащих предусмотренные для прижатия к рельсам (2) зажимные колодки (8), и срезающего ножа (9) для срезания сварочного грата (11) со сварного стыка (12), отличающийся тем, что на одной половине (4) агрегата...
Предыдущий патент: Гетероциклическое соединение и его применение
Следующий патент: Фармацевтические композиции, включающие бриварацетам
Случайный патент: Композиционные материалы на основе природных алюмосиликатов и наполнителей, смешиваемых в щелочной среде, и технологический процесс их производства