Устройство для контроля двери лифта
Формула / Реферат
1. Способ контроля состояния автоматической двери в здании, отличающийся тем, что он включает
измерение ускорения или скорости двери и крутящего момента электродвигателя двери, приводящего дверь в движение;
создание динамической модели двери, которая содержит в качестве своей части силы, действующие на дверь;
моделирование ускорения или скорости двери с использованием динамической модели двери;
вычисление компонента ошибки как разности между измеряемыми и оцениваемыми значениями ускорения или скорости двери;
вычисление силы трения, прикладываемой к двери, с помощью минимизации вышеупомянутого компонента ошибки или выражения, выводимого из него и содержащего этот компонент ошибки; и
получение вывода о состоянии работоспособности двери путем сравнения вычисленной силы трения и ее изменения с номинальными значениями.
2. Способ по п.1, отличающийся тем, что включает измерение ускорения двери с помощью датчика ускорения.
3. Способ по любому из предшествующих пп.1, 2, отличающийся тем, что дополнительно включает измерение скорости двери с использованием сигнала, пропорционального скорости, получаемого от электродвигателя двери.
4. Способ по любому из предшествующих пп.1-3, отличающийся тем, что включает
использование в качестве параметров в динамической модели одного или нескольких из следующих параметров: скорости двери, тока электродвигателя, приводящего в движение дверь, коэффициента крутящего момента электродвигателя, трения в электродвигателе, силового коэффициента пружины закрывания двери и массы груза закрывания двери;
моделирование ускорения и скорости двери в модели как функции одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери;
вычисление первой функции ошибки как разности между измеренной мгновенной скоростью двери и мгновенной скоростью двери, смоделированной в модели;
вычисление второй функции ошибки возведением в квадрат первой функции ошибки и суммированием возведенных в квадрат первых функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов;
вычисление одного или нескольких из следующих параметров: массы двери, силы трения, прикладываемой к двери, и силы, вызванной углом наклона двери, с помощью минимизации второй функции ошибки; и
подачу вычисленных параметров обратно в динамическую модель для использования в следующем цикле вычисления.
5. Способ по любому из предшествующих пп.1-4, отличающийся тем, что включает
использование в качестве параметров в динамической модели одного или нескольких из следующих параметров: скорости двери, тока электродвигателя, приводящего в движение дверь, коэффициента крутящего момента электродвигателя, трения в электродвигателе, силового коэффициента пружины закрывания двери и массы груза закрывания двери;
моделирование ускорения двери в модели как функции одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери;
вычисление третьей функции ошибки как разности между измеренным мгновенным ускорением двери и мгновенным ускорением двери, смоделированным в модели;
вычисление четвертой функции ошибки возведением в квадрат третьей функции ошибки и суммированием возведенных в квадрат третьих функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов;
вычисление одного или нескольких из следующих параметров: массы двери, силы трения, прикладываемой к двери, и силы, вызванной углом наклона двери, с помощью минимизации четвертой функции ошибки; и
подачу вычисленных параметров обратно в динамическую модель для использования в следующем цикле вычисления.
6. Способ по любому из предшествующих пп.1-5, отличающийся тем, что включает определение значения массы двери при пуске системы и установление массы двери в качестве константы в динамической модели двери.
7. Способ по любому из предшествующих пп.1-6, отличающийся тем, что включает
использование генетического алгоритма для обнаружения отказа устройства закрывания двери;
использование в генетическом алгоритме хромосомы, которая состоит из генов, описывающих работу устройства закрывания, силу трения, прикладываемую к двери, и силу, вызванную углом наклона двери;
использование квадратичной функции ошибки как значения качества генетического алгоритма; и
использование динамической модели двери при определении фенотипа генетического алгоритма.
8. Система для контроля состояния автоматической двери лифта или здания, содержащая по крайней мере одну дверь (20, 30, 40), которая перемещается горизонтально на месте ее установки и систему (26, 36, 46) управления для открывания и закрывания двери, отличающаяся тем, что она содержит
средства (20, 30, 40) для измерения ускорения или скорости двери и крутящего момента электродвигателя, приводящего дверь в движение;
динамическую модель (22, 32, 42) двери, включающую силы, действующие на дверь;
средства (22, 32, 42) для моделирования ускорения или скорости двери с использованием динамической модели двери;
средства (23, 33, 43, 24, 34, 44) для вычисления компонента ошибки с использованием информации об измеренных и смоделированных ускорении или скорости двери;
средства (25, 35, 45) для вычисления силы трения, прикладываемой к двери, путем минимизации вышеупомянутого компонента ошибки или выражения, выведенного из него и содержащего этот компонент ошибки; и
средства (26, 35, 46) выведения заключения о состоянии работоспособности двери путем сравнения измеренной силы трения и ее изменения с номинальными значениями.
9. Система по п.8, отличающаяся тем, что дополнительно содержит плату (26, 36, 46) управления дверью в качестве системы управления дверью.
10. Система по любому из предшествующих пп.8, 9, отличающаяся тем, что содержит датчик (30, 40) ускорения в качестве средства измерения ускорения двери.
11. Система по любому из предшествующих пп.8-10, отличающаяся тем, что содержит пропорциональный скорости и получаемый от электродвигателя двери сигнал (20), используемый как средство измерения скорости vd двери.
12. Система по любому из предшествующих пп.8-11, отличающаяся тем, что содержит
средства для определения одного или нескольких параметров динамической модели (22) посредством операций, включающих измерение скорости vd двери, измерение тока электродвигателя, приводящего дверь в движение, определение коэффициента крутящего момента электродвигателя, определение трения в электродвигателе, определение силового коэффициента пружины закрывания двери и измерение массы груза закрывания двери;
средства для моделирования скорости двери в динамической модели (22), где упомянутая скорость задается как функция одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери;
средства (23) для вычисления первой функции ошибки, которая получается как разность между измеренной мгновенной скоростью двери и мгновенной скоростью двери, смоделированной в модели;
средства (24) для вычисления второй функции ошибки, которая получается возведением в квадрат первой функции (23) ошибки и суммированием возведенных в квадрат первых функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов (21);
первые средства (25) оптимизации для минимизации второй функции ошибки (24), которые вычисляют один или несколько из следующих параметров: массу двери, силу трения, прикладываемую к двери, и силу, вызванную углом наклона двери; и
первую обратную связь для подачи вычисленных параметров в динамическую модель (22) для использования в следующем цикле вычисления.
13. Система по любому из предшествующих пп.8-12, отличающаяся тем, что содержит
средства для определения одного или нескольких параметров динамичесъющ модели (32) посредством операций, включающих измерение ускорения двери, измерение тока электродвигателя, приводящего дверь в движение, определение коэффициента крутящего момента электродвигателя, определение трения в электродвигателе, определение силового коэффициента пружины закрывания двери и измерение массы груза закрывания двери;
средства для моделирования ускорения двери в динамической модели (32), где упомянутое ускорение определяется как функция одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери;
средства (33) для вычисления третьей функции ошибки, которая получается как разность между измеренным мгновенным ускорением двери и мгновенным ускорением двери, смоделированным в модели;
средства (34) для вычисления четвертой функции ошибки, которая получается возведением в квадрат третьей функции (33) ошибки и суммированием возведенных в квадрат третьих функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов (31);
вторые средства (35) оптимизации для минимизации четвертой функции (34) ошибки, которые вычисляют один или несколько из следующих параметров: массу двери, силу трения, прикладываемую к двери, и силу, вызванную углом наклона двери; и
вторую обратную связь для подачи вычисленных параметров в динамическую модель (32) с целью их использования в следующем цикле вычисления.
14. Система по любому из предшествующих пп.8-13, отличающаяся тем, что содержит
третьи средства (45) оптимизации для использования генетического алгоритма с целью обнаружения отказа устройства закрывания двери;
вышеупомянутые третьи средства (45) оптимизации для использования одного или нескольких параметров в генетическом алгоритме в качестве генов хромосомы, причем этими параметрами являются работа устройства закрывания, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери;
вышеупомянутые третьи средства (45) оптимизации для использования квадратичной функции (44) ошибки в качестве значения качества генетического алгоритма; и
вышеупомянутые третьи средства (45) оптимизации для использования динамической модели (42) двери при определении фенотипа генетического алгоритма.

Текст
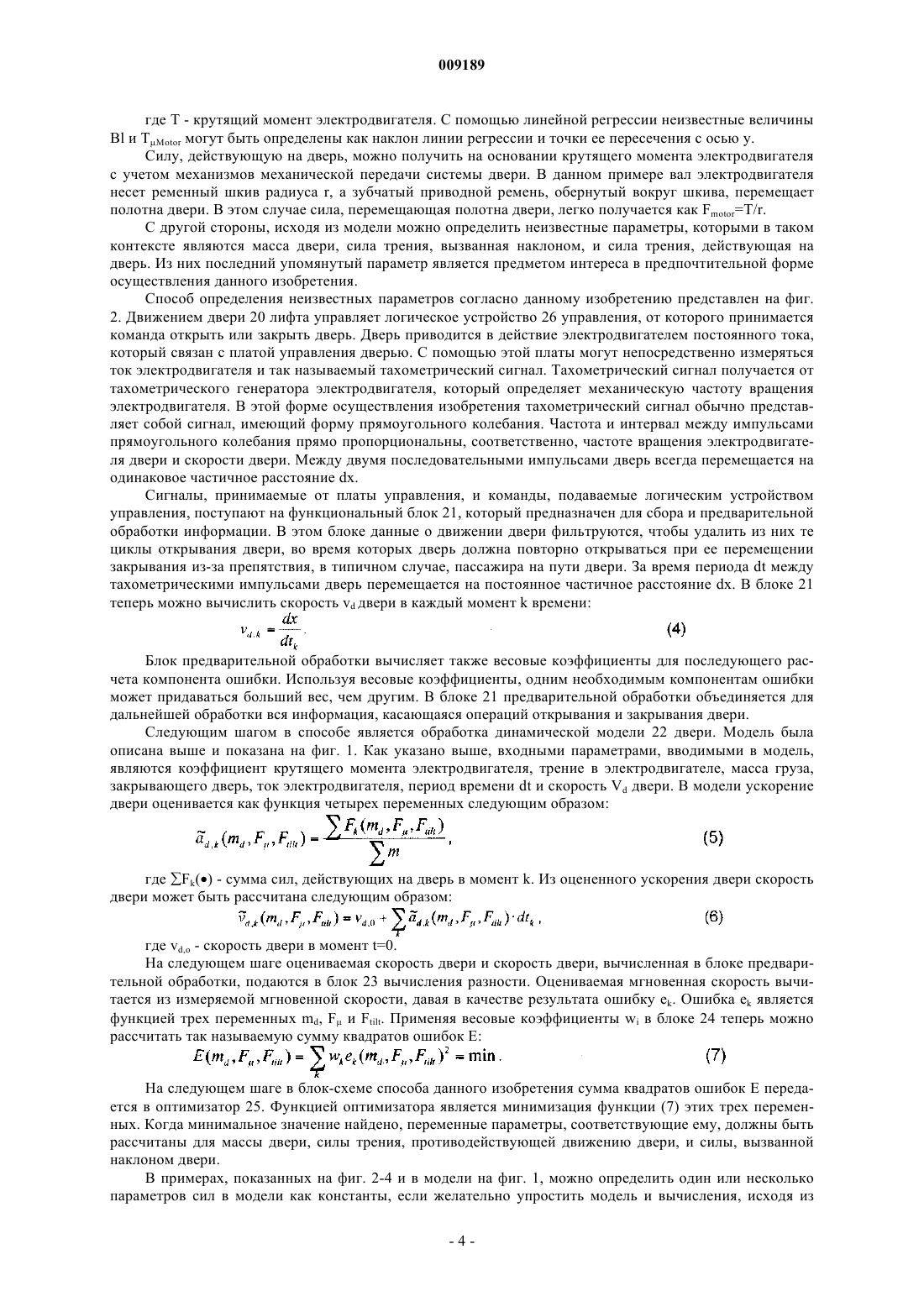
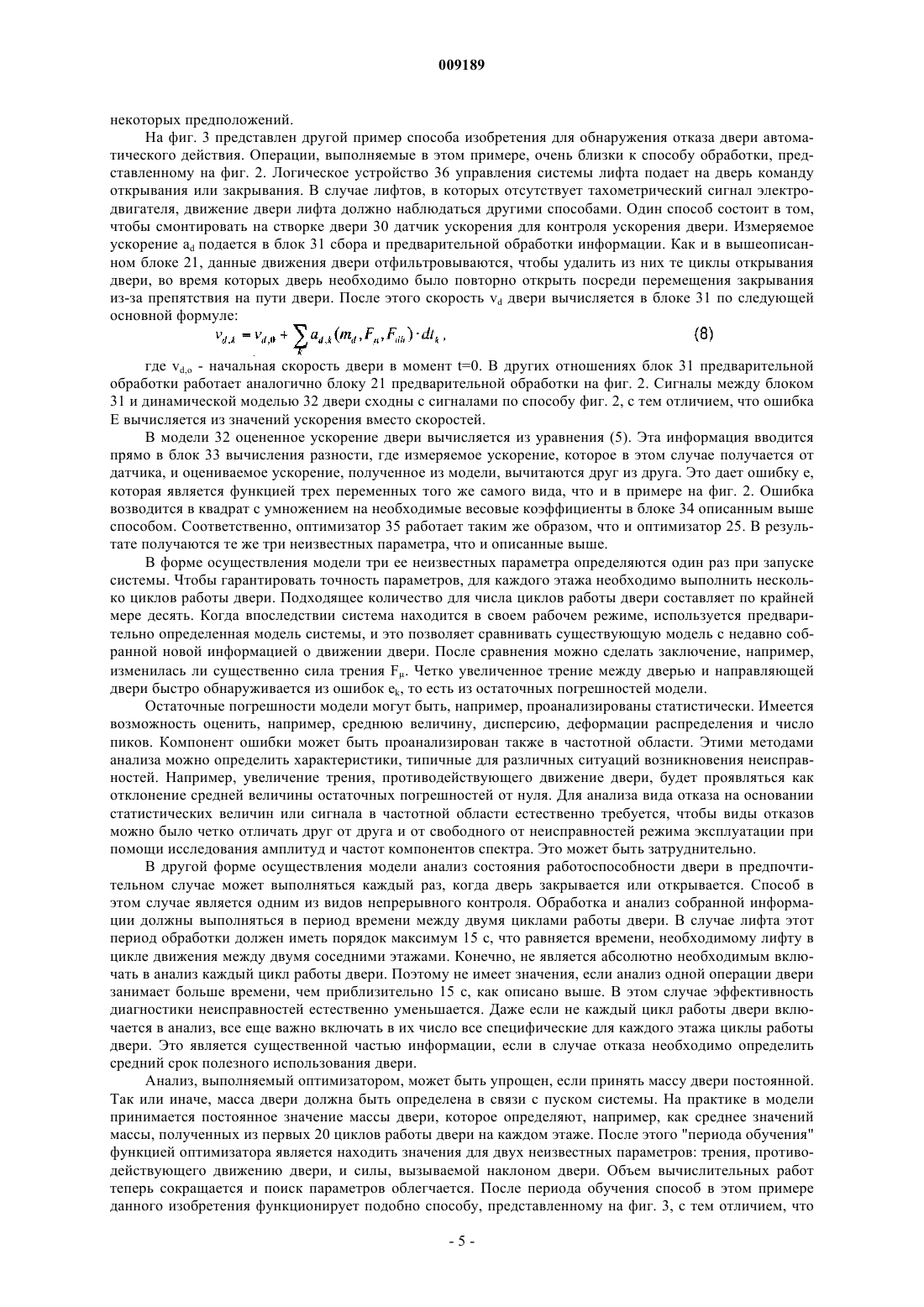
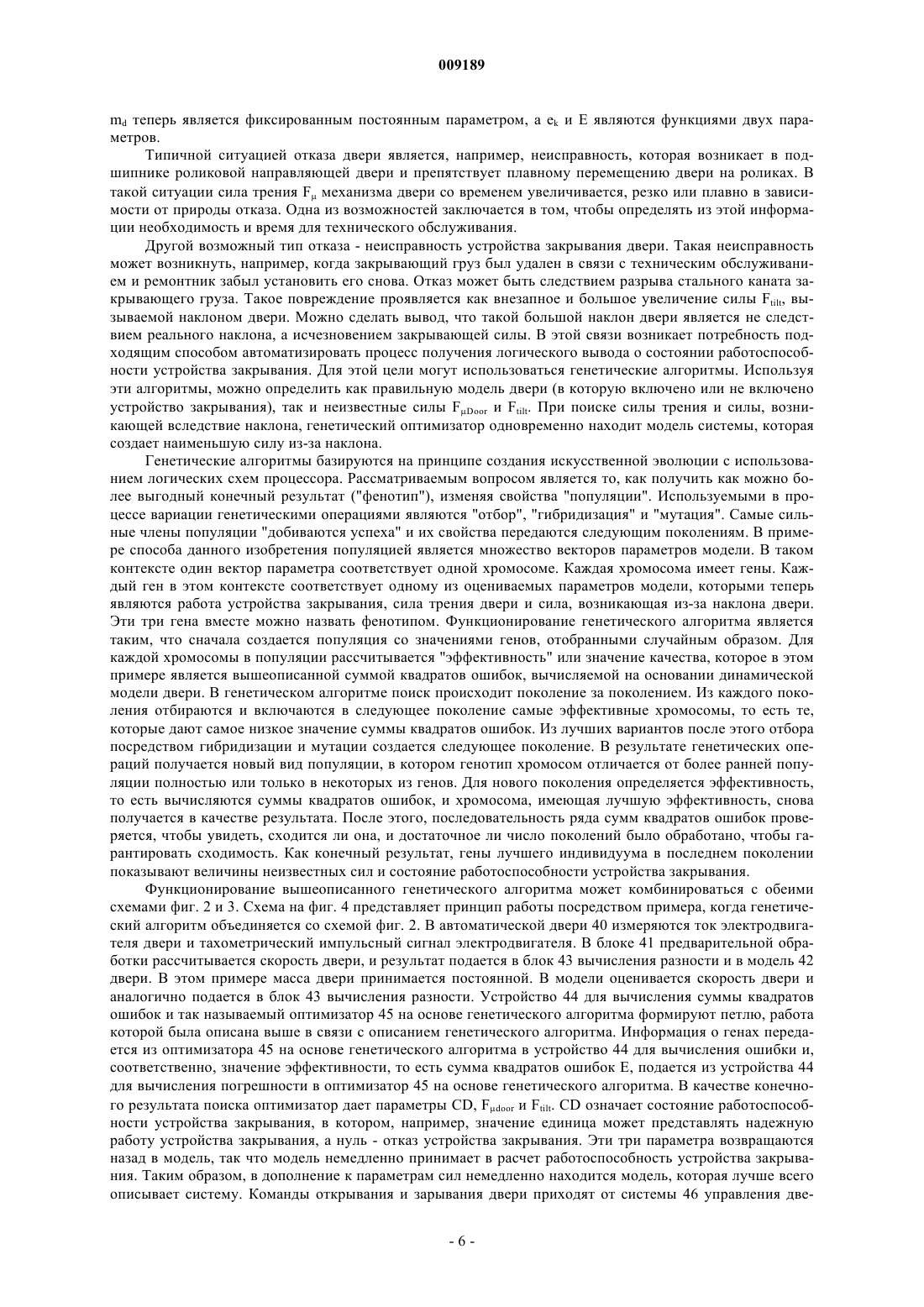
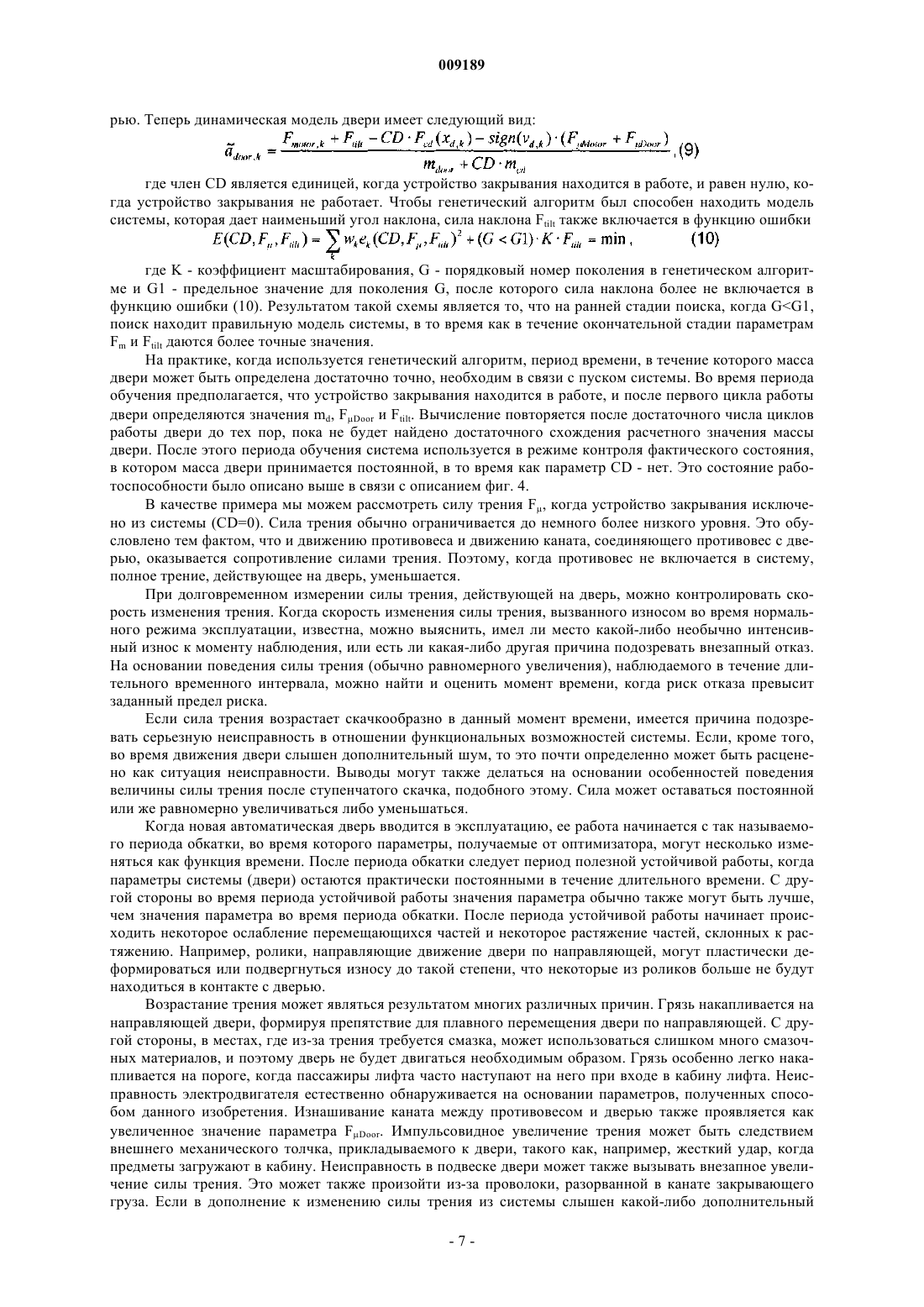
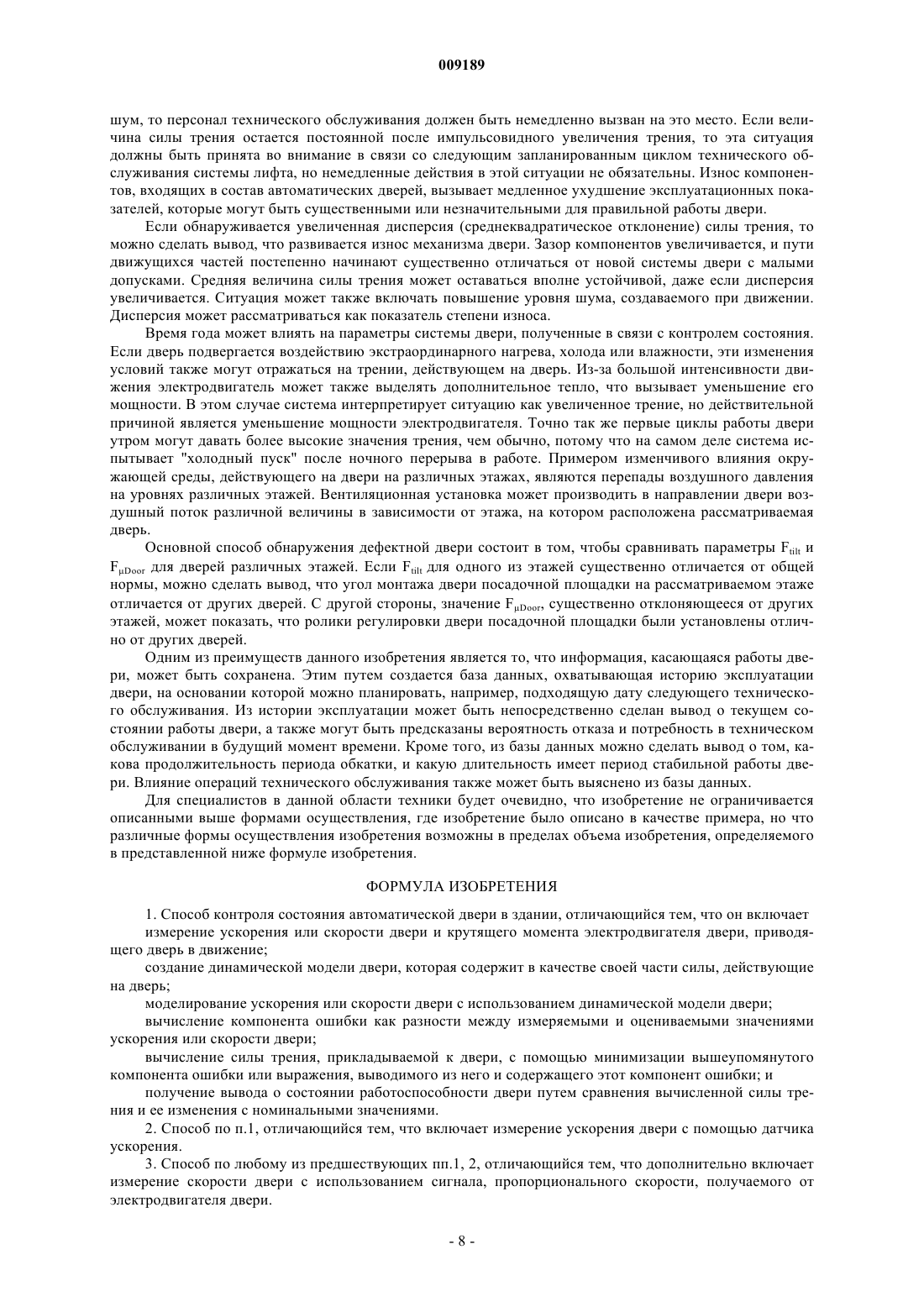
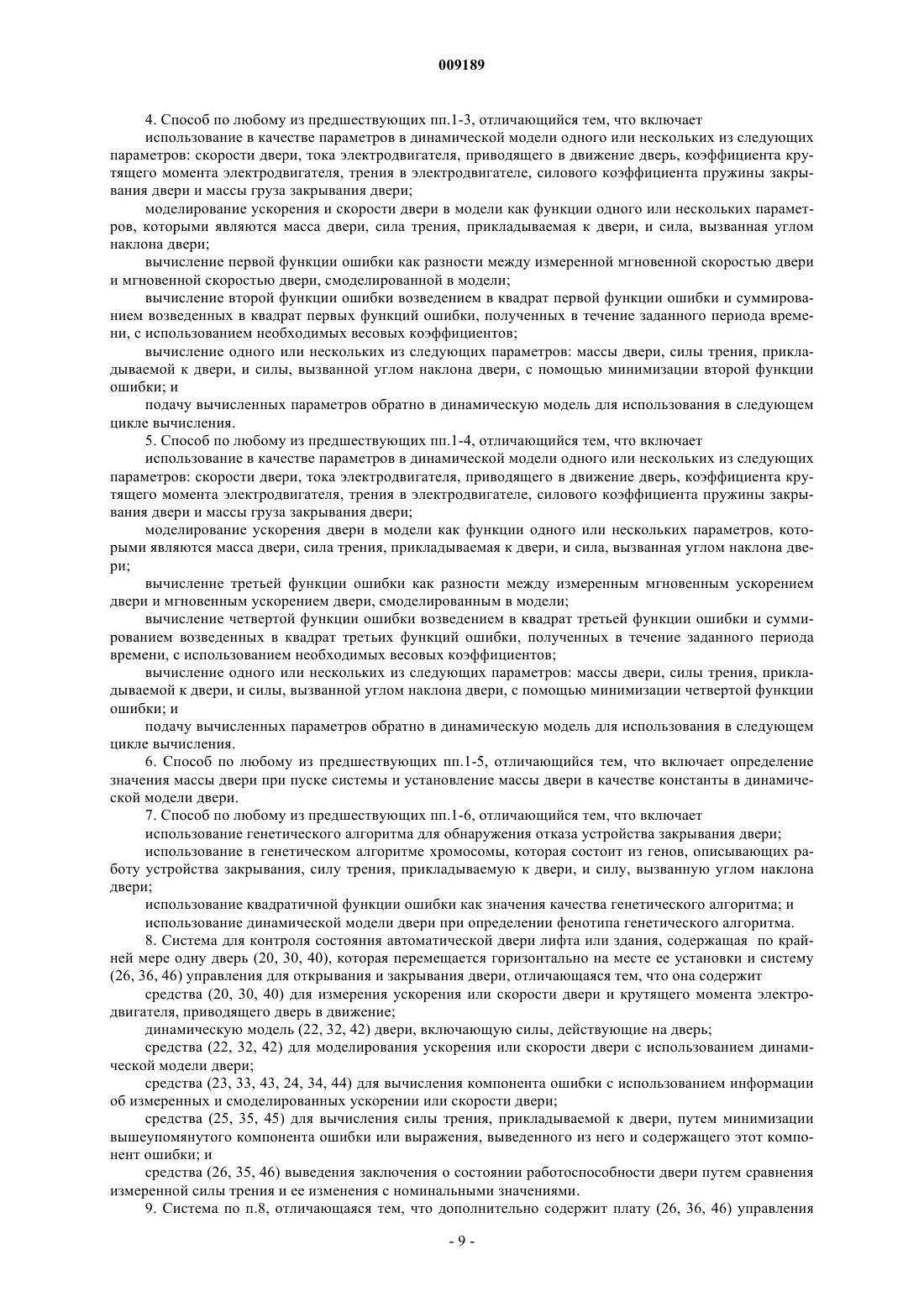
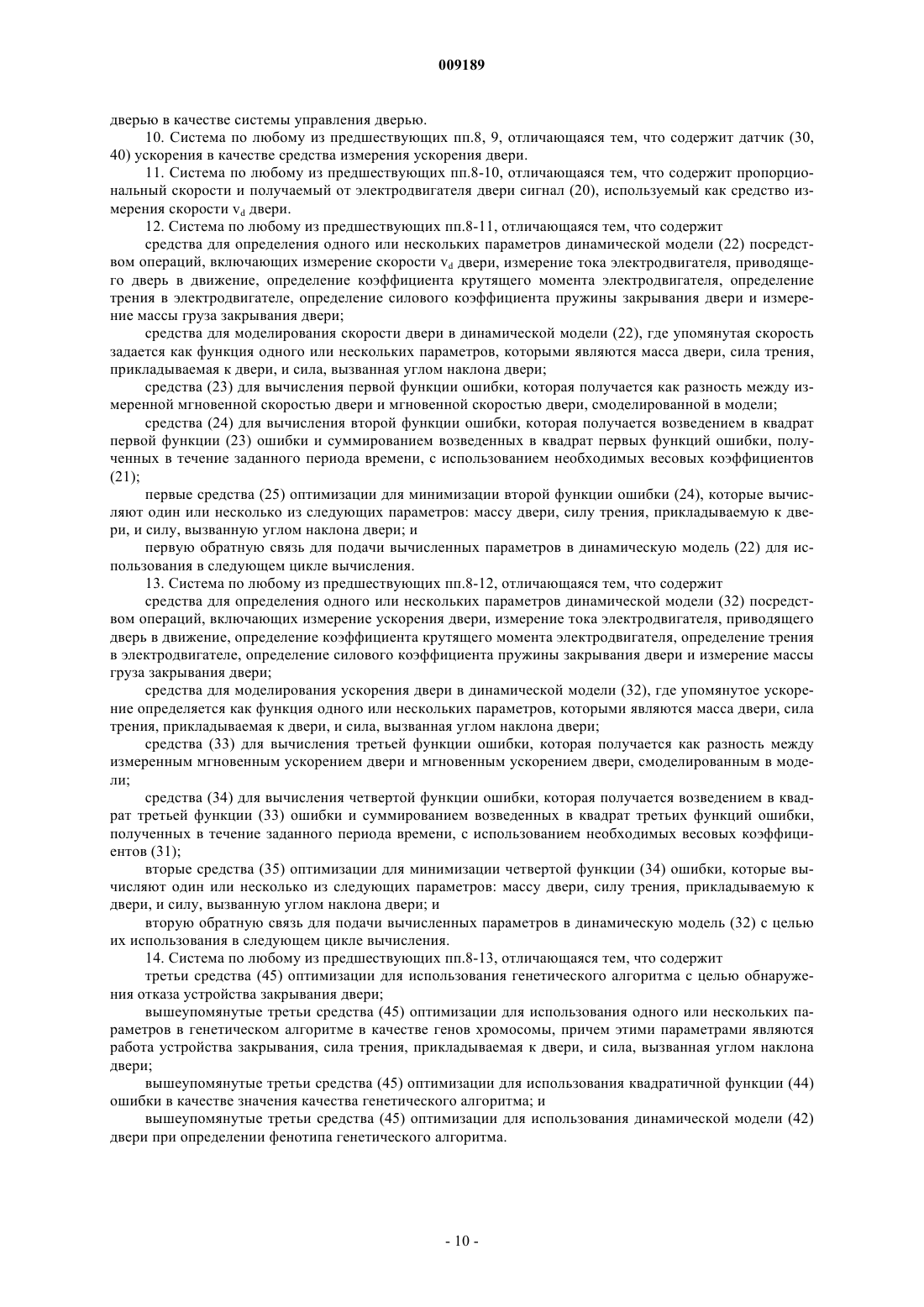
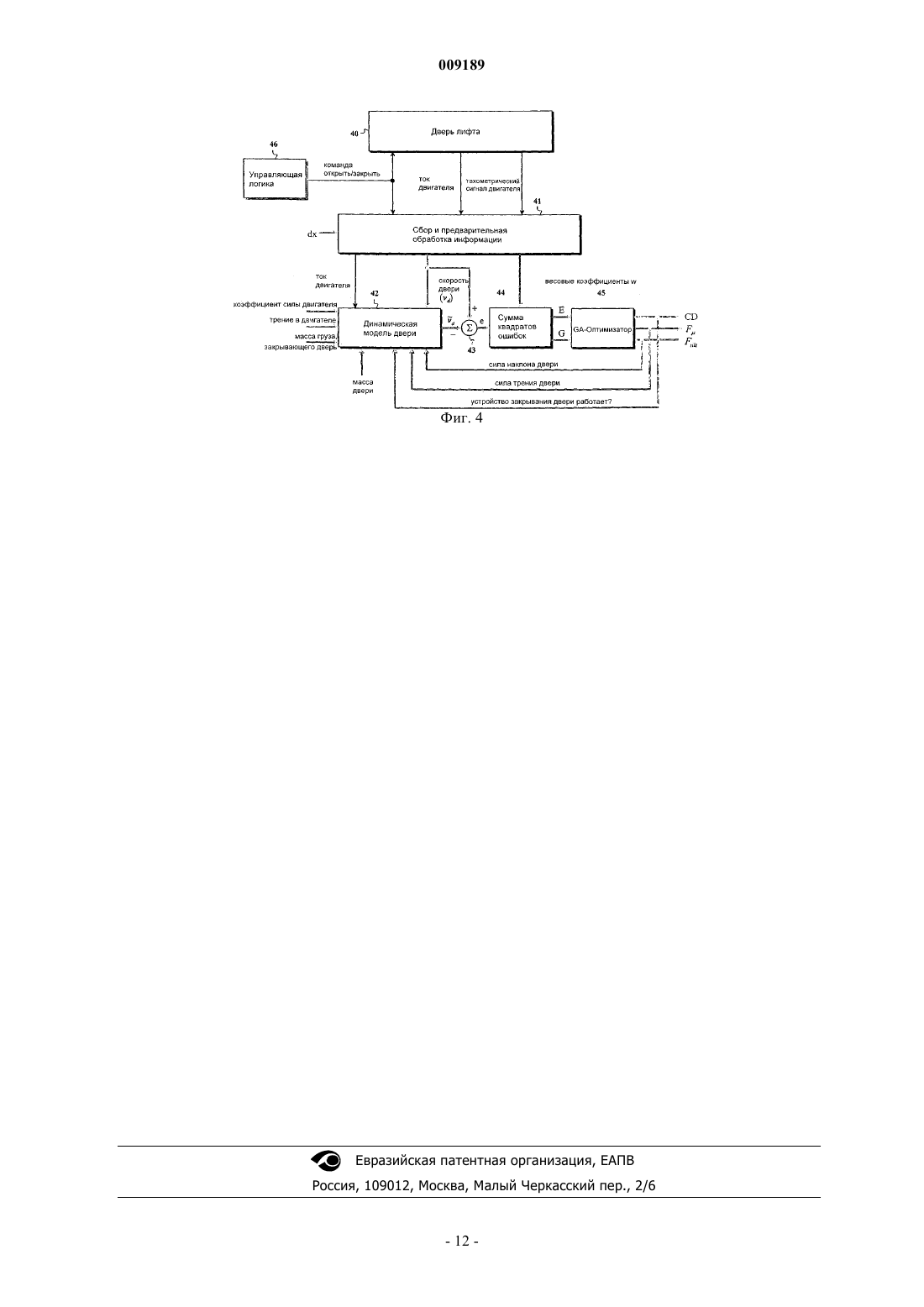
009189 Область техники Данное изобретение касается контроля исправности управляемой компьютером двери в системе лифта или в другой системе, содержащей рассматриваемые компоненты. Предпосылки создания изобретения Механическая система при нормальном состоянии работоспособности характеризуется некоторой величиной силы трения, которое оказывает сопротивление перемещению. Если величины сил трения в системе могут быть определены посредством измерений или математически, то эта информация может использоваться как показатель состояния работоспособности системы. Система лифта содержит многочисленные компоненты, которые подвергаются истиранию и износу. Движение кабины лифта вызывает износ компонентов, включая, например, канаты лифта и направляющие кабины лифта. Один из таких компонентов - дверь лифта, которая перемещается автоматически по горизонтальной направляющей. На нее действуют силы, прикладываемые к ней с различных направлений, и ее верхнее и нижнее ребра находятся в контакте с направляющими, которые обеспечивают перемещение двери по ее пути. Имеется также сила трения, противодействующая движению автоматической двери. Работа двери может нарушаться, когда достаточное количество грязи накапливается на направляющей двери на пороге кабины лифта. Вследствие такого физического засорения сила, противодействующая движению двери, может вырасти до такой величины, что, в конце концов, система управления двери больше не будет способна открывать или закрывать дверь. Величина силы трения не может быть измерена непосредственно. Невозможно установить на двери отдельный "измеритель трения". Величина трения, оказывающего сопротивление перемещению двери,должна измеряться косвенно. Можно создать модель исследуемой системы, в данном случае - двери лифта, чтобы изучать силы, прикладываемые к двери. Одной из сил, входящих в модель, является сила трения, противодействующая движению. Используя модель, можно вычислить необходимые параметры,когда известны амплитуды сил открывания и закрывания двери, и измеряется ускорение или скорость двери. Этим способом могут быть определены неизвестные параметры, такие как силы трения. Таким образом, рассматриваемый вопрос является проблемой оптимизации и оценки параметров. Например, в системе лифта дверной узел состоит из двери кабины, перемещающейся вместе с кабиной, и дверей посадочных площадок (шахтных дверей) на различных этажах. Современная автоматическая дверь лифта открывается и закрывается посредством электродвигателя постоянного тока. Крутящий момент, создаваемый электродвигателем постоянного тока, прямо пропорционален току электродвигателя. Энергия электродвигателя передается двери, например, посредством зубчатого приводного ремня, и дверь перемещается по роликам. Из соображений безопасности дверь посадочной площадки сама закрывается без электродвигателя посредством устройства закрывания. Закрывающая сила устройства закрывания может создаваться закрывающим грузом или спиральной пружиной. Ток электродвигателя и соответствующий крутящий момент измеряются на плате управления дверью или непосредственно в проводнике тока электродвигателя. Можно также контролировать так называемый тахометрический импульсный сигнал электродвигателя. Тахометрический сигнал представляет собой прямоугольное колебание, частота которого зависит от частоты вращения электродвигателя и, следовательно, от скорости двери. Проблемой, связанной с решениями известного уровня техники, является то, что сила трения, действующая на дверь лифта, не может измеряться непосредственно. Это требует использования косвенного способа для оценки величины силы трения. Величина силы трения необходима для оценки наработки двери на отказ или для того, чтобы предсказать будущее время, к которому состояние работоспособности двери уменьшится до уровня, согласующегося с заданным критерием. Цель изобретения Целью данного изобретения является определение состояния работоспособности автоматической двери с электроприводом, используемой в системе лифта или в некоторой другой системе, посредством непрерывного контроля величины силы трения, противодействующей движению двери. Сущность изобретения Способ и система изобретения отличаются признаками, указанными в отличительных частях пп. 1 и 8 формулы изобретения. Другие формы осуществления изобретения отличаются признаками, раскрытыми в других пунктах формулы изобретения. Патентоспособные формы осуществления изобретения представлены также в описательной части данного патента. Патентоспособное содержание, раскрытое в описании, может быть определено также другими способами, чем это сделано в нижеприведенной формуле изобретения. Патентоспособное содержание может состоять также из нескольких отдельных изобретений, особенно если изобретение рассматривается в свете явных или неявных подзадач либо в отношении преимуществ или ряда достигаемых преимуществ. В этом случае некоторые из признаков, содержащихся в нижеприведенных пунктах формулы изобретения, могут быть лишними с точки зрения отдельных идей изобретения. В рамках основной идеи изобретения отличительные признаки различных форм осуществления изобретения могут применяться вместе с другими формами осуществления. Способ согласно изобретению может использоваться для обследования в режиме реального време-1 009189 ни состояния автоматической двери лифта или, более широко, двери автоматического действия в здании. В более точных терминах, автоматическая дверь является раздвижной дверью, которая управляется электродвигателем и перемещению закрывания которой может помогать устройство закрывания. На дверь действуют различные силы, из которых нас теперь особенно интересует величина силы трения, прикладываемой к двери. Исходя из силы трения, можно сделать вывод о крайней необходимости технического обслуживания, а в менее серьезных случаях информация о силе трения лучше всего может использоваться для того, чтобы предвидеть будущее время, когда по всей вероятности начнут появляться нарушения в работе двери. Состояние работоспособности устройства закрывания двери может быть определено немедленно. В первой форме осуществления способа данного изобретения измеряется скорость автоматической двери. Это может быть достигнуто использованием так называемого тахометрического сигнала, получаемого от электродвигателя двери. Тахометрический сигнал представляет собой прямоугольное колебание, в котором интервал между импульсами зависит от частоты вращения электродвигателя и, следовательно, от скорости двери. На основании тахометрического сигнала может быть рассчитана скорость двери. Существенной частью способа является динамическая модель двери. Некоторые из параметров модели обновляются после каждого чистого цикла работы двери. Чистый цикл работы двери означает операции открывания и закрывания двери, когда во время перемещения закрывания никакие повторные открывания не происходят. Модель содержит дверь, устройство закрывания и силы, прикладываемые к этим частям, включая силу трения. Используя модель как вспомогательное средство, оценивают ускорение двери, и исходя из него - скорость двери как функцию времени. Измеряемую и оцениваемую мгновенные скорости сравнивают друг с другом, и получают компонент ошибки. В каждый момент времени ошибка является функцией трех переменных (массы двери, силы трения, прикладываемой к двери, и силы, возникающей из-за наклона двери). Затем вычисляется сумма квадратов ошибок, при этом каждый квадрат ошибки взвешивается желательным весовым коэффициентом. Для полученной в результате так называемой суммы квадратов ошибок находят минимальное значение, при котором три разыскиваемых параметра модели лучше соответствуют действительности. Из величины силы трения, полученной таким образом, можно сделать вывод о текущем состоянии работоспособности двери. В другой форме осуществления способа ускорение двери измеряется с помощью датчика ускорения, находящегося на двери. Способ реализуется как описано выше, за исключением того, что в этом случае значением, оцениваемым в динамической модели, является ускорение. При вычислении ошибки мгновенное ускорение, оцениваемое по модели, вычитается из измеряемого мгновенного ускорения. В этой форме осуществления изобретения ошибка также является функцией вышеупомянутых трех переменных и дальнейшая обработка для определения параметров выполняется так же, как в описанном выше примере. Входными параметрами, необходимыми для динамической модели двери являются скорость двери,ток электродвигателя привода двери, коэффициент крутящего момента электродвигателя, трение в электродвигателе и масса груза закрывания двери или силовой коэффициент закрывающей пружины. Вычисление может быть упрощено при установлении среди переменных массы двери как константы. В этом случае масса двери определяется в связи с пуском в ход или вводом системы в эксплуатацию путем получения средней величины из необходимого числа циклов работы двери. Длительность "периода обучения", который необходимо исследовать, может составлять, например, приблизительно двадцать циклов работы двери. Как только масса определяется как средняя величина результатов периода обучения, эта масса двери затем устанавливается в качестве константы. После этого в логике оптимизации обрабатывается функция только двух переменных (силы трения двери и силы, вызванной наклоном двери),так что эта обработка требует меньшего объема вычислений и времени, чем вышеприведенная. Массу двери можно задавать как константу, так как можно предполагать, что она не будет существенно изменяться в нормальных рабочих условиях. Для непосредственного обнаружения отказа устройства закрывания двери можно использовать генетический алгоритм (GA). Посредством генетического алгоритма можно одновременно определять как правильную модель системы двери (с устройством закрывания или без него), так и неизвестные силы,связанные с трением и наклоном двери. Параметры динамической модели двери кодируются в хромосому генетического алгоритма. В этом контексте неизвестные параметры, относящиеся к работе устройства закрывания, силе трения, прикладываемой к двери, и силе, вызванной углом наклона двери, являются генами, другими словами, они вместе составляют хромосому. Функцией качества хромосомы является функция квадратичной ошибки, которая может рассматриваться как показатель эффективности решения или фенотипа, представленного хромосомой. С различными значениями генов или аллелей соответственно получаются различные фенотипы, из которых в результате поиска оптимизатор с генетическим алгоритмом в конце концов выбирает фенотип, дающий минимальное значение. Значения генов, соответствующие этому фенотипу, указывают состояние системы двери в момент исследования. Одним из преимуществ способа согласно данному изобретению является то, что информация, относящаяся к работе двери, может сохраняться. Таким образом создается база данных, охватывающая историю эксплуатации двери, на основании которой можно планировать, например, подходящую дату для-2 009189 следующего технического обслуживания. На основании истории эксплуатации можно непосредственно сделать вывод о текущем состоянии работы двери, а также можно предсказать вероятность отказа и необходимость технического обслуживания в будущий момент времени. Перечень чертежей На фиг. 1 показана динамическая модель автоматической двери согласно данному изобретению. На фиг. 2 показана блок-схема первого способа определения неизвестных параметров модели согласно данному изобретению. На фиг. 3 показана блок-схема другого способа определения неизвестных параметров модели согласно данному изобретению. На фиг. 4 показана блок-схема третьего способа определения неизвестных параметров модели согласно данному изобретению. Подробное описание изобретения Чтобы определять силу трения, действующую на дверь, создается динамическая модель автоматической двери, в которой наблюдают за силами, прикладываемыми к двери. Динамическая модель двери представлена на фиг. 1. Основным законом, используемым здесь, является второй закон Ньютона, согласно которому сила, прикладываемая к предмету, равна произведению массы и ускорения предмета. Другой основной закон, касающийся трения, дает величину силы трения, противодействующей движению предмета, как произведение коэффициента трения и силы, прижимающей предмет к исследуемой поверхности (для предмета, скользящего по ровной поверхности, - силы тяжести). Для ясности, в динамической модели все движущиеся массы принимаются сосредоточенными в отдельной точечной массеmdoor10. Соответственно, все силы трения, присутствующие в системе, за исключением трения в электродвигателе, могут быть объединены в единственный член сосредоточенной силы трения Fdoor. Модель динамической работы системы двери может быть создана с использованием пяти различных сил, действующих на нее: силы электродвигателя; силы, вызываемой закрывающим грузом или пружиной; силы,вызываемой углом наклона двери; внутренней силы трения в электродвигателе и силы трения, вызываемой самой дверью. Полная масса системы состоит из сосредоточенной массы двери 10 и массы возможного закрывающего груза 11. Все движущиеся массы, содержащиеся в механике двери, сосредоточены в массе двери 10. На фиг. 1 показаны сосредоточенные массы и силы в системе, а также положительные направления скорости и ускорения. Из динамической модели и второго закона Ньютона получается выражение для мгновенного ускорения door (t) двери 10: где Fmotor=Bl.Imotor(t) и Fcd(xd(t=mcdg, когда устройством закрывания является груз, и Fcd(xd(t =kcd(xd0 +xd(t, когда устройством закрывания является пружина, Bl - коэффициент крутящего момента электродвигателя, Imotor - ток электродвигателя, Fmotor - сила, создаваемая электродвигателем, Ftilt - горизонтальная составляющая силы, вызываемой наклоном двери, Fcd -сила, создаваемая устройством закрывания, FMotor- внутренняя сила трения в электродвигателе, FDoor- сосредоточенная сила трения, действующая на дверь и вызываемая всеми субкомпонентами, mdoor- общая сосредоточенная масса, состоящая из всех масс двери, и mcd - масса противовеса. Если устройством закрывания является пружина, то тогда mcd=0. Поскольку в качестве устройства закрывания более широко используется закрывающий груз, то в дальнейшем мы будем иметь дело только с закрывающим грузом. Однако это не ограничивает изобретение исключительно закрывающим грузом, а устройством закрывания может быть любой механизм, который получает свою закрывающую силу от пружины или некоторого другого устройства. Когда отсчеты величин, которые должны измеряться у двери, получают посредством устройства согласно изобретению для определения трения, это означает переход от непрерывного времени к дискретному представлению. В этом случае (1) принимает следующий вид: где момент t заменен взятым в этот же момент отсчетом с текущим номером k. Из числа параметров динамической модели двери заранее должны быть известны масса закрывающего груза, коэффициент крутящего момента электродвигателя и внутренний момент трения в электродвигателе. Массу закрывающего груза можно легко определить взвешиванием. Коэффициент крутящего момента электродвигателя и внутренний момент трения в электродвигателе можно определить с помощью динамометра. Используя динамометр, крутящий момент электродвигателя можно измерить как функцию тока электродвигателя. Результаты, полученные с различными текущими величинами, формируют приблизительно прямую линию T, уравнение которой имеет вид:-3 009189 где T - крутящий момент электродвигателя. С помощью линейной регрессии неизвестные величиныBl и TMotor могут быть определены как наклон линии регрессии и точки ее пересечения с осью у. Силу, действующую на дверь, можно получить на основании крутящего момента электродвигателя с учетом механизмов механической передачи системы двери. В данном примере вал электродвигателя несет ременный шкив радиуса r, а зубчатый приводной ремень, обернутый вокруг шкива, перемещает полотна двери. В этом случае сила, перемещающая полотна двери, легко получается как Fmotor=T/r. С другой стороны, исходя из модели можно определить неизвестные параметры, которыми в таком контексте являются масса двери, сила трения, вызванная наклоном, и сила трения, действующая на дверь. Из них последний упомянутый параметр является предметом интереса в предпочтительной форме осуществления данного изобретения. Способ определения неизвестных параметров согласно данному изобретению представлен на фиг. 2. Движением двери 20 лифта управляет логическое устройство 26 управления, от которого принимается команда открыть или закрыть дверь. Дверь приводится в действие электродвигателем постоянного тока,который связан с платой управления дверью. С помощью этой платы могут непосредственно измеряться ток электродвигателя и так называемый тахометрический сигнал. Тахометрический сигнал получается от тахометрического генератора электродвигателя, который определяет механическую частоту вращения электродвигателя. В этой форме осуществления изобретения тахометрический сигнал обычно представляет собой сигнал, имеющий форму прямоугольного колебания. Частота и интервал между импульсами прямоугольного колебания прямо пропорциональны, соответственно, частоте вращения электродвигателя двери и скорости двери. Между двумя последовательными импульсами дверь всегда перемещается на одинаковое частичное расстояние dx. Сигналы, принимаемые от платы управления, и команды, подаваемые логическим устройством управления, поступают на функциональный блок 21, который предназначен для сбора и предварительной обработки информации. В этом блоке данные о движении двери фильтруются, чтобы удалить из них те циклы открывания двери, во время которых дверь должна повторно открываться при ее перемещении закрывания из-за препятствия, в типичном случае, пассажира на пути двери. За время периода dt между тахометрическими импульсами дверь перемещается на постоянное частичное расстояние dx. В блоке 21 теперь можно вычислить скорость vd двери в каждый момент k времени: Блок предварительной обработки вычисляет также весовые коэффициенты для последующего расчета компонента ошибки. Используя весовые коэффициенты, одним необходимым компонентам ошибки может придаваться больший вес, чем другим. В блоке 21 предварительной обработки объединяется для дальнейшей обработки вся информация, касающаяся операций открывания и закрывания двери. Следующим шагом в способе является обработка динамической модели 22 двери. Модель была описана выше и показана на фиг. 1. Как указано выше, входными параметрами, вводимыми в модель,являются коэффициент крутящего момента электродвигателя, трение в электродвигателе, масса груза,закрывающего дверь, ток электродвигателя, период времени dt и скорость Vd двери. В модели ускорение двери оценивается как функция четырех переменных следующим образом: где Fk - сумма сил, действующих на дверь в момент k. Из оцененного ускорения двери скорость двери может быть рассчитана следующим образом: где vd,o - скорость двери в момент t=0. На следующем шаге оцениваемая скорость двери и скорость двери, вычисленная в блоке предварительной обработки, подаются в блок 23 вычисления разности. Оцениваемая мгновенная скорость вычитается из измеряемой мгновенной скорости, давая в качестве результата ошибку ek. Ошибка ek является функцией трех переменных md, F и Ftilt. Применяя весовые коэффициенты wi в блоке 24 теперь можно рассчитать так называемую сумму квадратов ошибок Е: На следующем шаге в блок-схеме способа данного изобретения сумма квадратов ошибок Е передается в оптимизатор 25. Функцией оптимизатора является минимизация функции (7) этих трех переменных. Когда минимальное значение найдено, переменные параметры, соответствующие ему, должны быть рассчитаны для массы двери, силы трения, противодействующей движению двери, и силы, вызванной наклоном двери. В примерах, показанных на фиг. 2-4 и в модели на фиг. 1, можно определить один или несколько параметров сил в модели как константы, если желательно упростить модель и вычисления, исходя из-4 009189 некоторых предположений. На фиг. 3 представлен другой пример способа изобретения для обнаружения отказа двери автоматического действия. Операции, выполняемые в этом примере, очень близки к способу обработки, представленному на фиг. 2. Логическое устройство 36 управления системы лифта подает на дверь команду открывания или закрывания. В случае лифтов, в которых отсутствует тахометрический сигнал электродвигателя, движение двери лифта должно наблюдаться другими способами. Один способ состоит в том,чтобы смонтировать на створке двери 30 датчик ускорения для контроля ускорения двери. Измеряемое ускорение ad подается в блок 31 сбора и предварительной обработки информации. Как и в вышеописанном блоке 21, данные движения двери отфильтровываются, чтобы удалить из них те циклы открывания двери, во время которых дверь необходимо было повторно открыть посреди перемещения закрывания из-за препятствия на пути двери. После этого скорость vd двери вычисляется в блоке 31 по следующей основной формуле: где vd,o - начальная скорость двери в момент t=0. В других отношениях блок 31 предварительной обработки работает аналогично блоку 21 предварительной обработки на фиг. 2. Сигналы между блоком 31 и динамической моделью 32 двери сходны с сигналами по способу фиг. 2, с тем отличием, что ошибка Е вычисляется из значений ускорения вместо скоростей. В модели 32 оцененное ускорение двери вычисляется из уравнения (5). Эта информация вводится прямо в блок 33 вычисления разности, где измеряемое ускорение, которое в этом случае получается от датчика, и оцениваемое ускорение, полученное из модели, вычитаются друг из друга. Это дает ошибку е,которая является функцией трех переменных того же самого вида, что и в примере на фиг. 2. Ошибка возводится в квадрат с умножением на необходимые весовые коэффициенты в блоке 34 описанным выше способом. Соответственно, оптимизатор 35 работает таким же образом, что и оптимизатор 25. В результате получаются те же три неизвестных параметра, что и описанные выше. В форме осуществления модели три ее неизвестных параметра определяются один раз при запуске системы. Чтобы гарантировать точность параметров, для каждого этажа необходимо выполнить несколько циклов работы двери. Подходящее количество для числа циклов работы двери составляет по крайней мере десять. Когда впоследствии система находится в своем рабочем режиме, используется предварительно определенная модель системы, и это позволяет сравнивать существующую модель с недавно собранной новой информацией о движении двери. После сравнения можно сделать заключение, например,изменилась ли существенно сила трения F. Четко увеличенное трение между дверью и направляющей двери быстро обнаруживается из ошибок ek, то есть из остаточных погрешностей модели. Остаточные погрешности модели могут быть, например, проанализированы статистически. Имеется возможность оценить, например, среднюю величину, дисперсию, деформации распределения и число пиков. Компонент ошибки может быть проанализирован также в частотной области. Этими методами анализа можно определить характеристики, типичные для различных ситуаций возникновения неисправностей. Например, увеличение трения, противодействующего движение двери, будет проявляться как отклонение средней величины остаточных погрешностей от нуля. Для анализа вида отказа на основании статистических величин или сигнала в частотной области естественно требуется, чтобы виды отказов можно было четко отличать друг от друга и от свободного от неисправностей режима эксплуатации при помощи исследования амплитуд и частот компонентов спектра. Это может быть затруднительно. В другой форме осуществления модели анализ состояния работоспособности двери в предпочтительном случае может выполняться каждый раз, когда дверь закрывается или открывается. Способ в этом случае является одним из видов непрерывного контроля. Обработка и анализ собранной информации должны выполняться в период времени между двумя циклами работы двери. В случае лифта этот период обработки должен иметь порядок максимум 15 с, что равняется времени, необходимому лифту в цикле движения между двумя соседними этажами. Конечно, не является абсолютно необходимым включать в анализ каждый цикл работы двери. Поэтому не имеет значения, если анализ одной операции двери занимает больше времени, чем приблизительно 15 с, как описано выше. В этом случае эффективность диагностики неисправностей естественно уменьшается. Даже если не каждый цикл работы двери включается в анализ, все еще важно включать в их число все специфические для каждого этажа циклы работы двери. Это является существенной частью информации, если в случае отказа необходимо определить средний срок полезного использования двери. Анализ, выполняемый оптимизатором, может быть упрощен, если принять массу двери постоянной. Так или иначе, масса двери должна быть определена в связи с пуском системы. На практике в модели принимается постоянное значение массы двери, которое определяют, например, как среднее значений массы, полученных из первых 20 циклов работы двери на каждом этаже. После этого "периода обучения" функцией оптимизатора является находить значения для двух неизвестных параметров: трения, противодействующего движению двери, и силы, вызываемой наклоном двери. Объем вычислительных работ теперь сокращается и поиск параметров облегчается. После периода обучения способ в этом примере данного изобретения функционирует подобно способу, представленному на фиг. 3, с тем отличием, чтоmd теперь является фиксированным постоянным параметром, а ek и Е являются функциями двух параметров. Типичной ситуацией отказа двери является, например, неисправность, которая возникает в подшипнике роликовой направляющей двери и препятствует плавному перемещению двери на роликах. В такой ситуации сила трения F механизма двери со временем увеличивается, резко или плавно в зависимости от природы отказа. Одна из возможностей заключается в том, чтобы определять из этой информации необходимость и время для технического обслуживания. Другой возможный тип отказа - неисправность устройства закрывания двери. Такая неисправность может возникнуть, например, когда закрывающий груз был удален в связи с техническим обслуживанием и ремонтник забыл установить его снова. Отказ может быть следствием разрыва стального каната закрывающего груза. Такое повреждение проявляется как внезапное и большое увеличение силы Ftilt, вызываемой наклоном двери. Можно сделать вывод, что такой большой наклон двери является не следствием реального наклона, а исчезновением закрывающей силы. В этой связи возникает потребность подходящим способом автоматизировать процесс получения логического вывода о состоянии работоспособности устройства закрывания. Для этой цели могут использоваться генетические алгоритмы. Используя эти алгоритмы, можно определить как правильную модель двери (в которую включено или не включено устройство закрывания), так и неизвестные силы FDoor и Ftilt. При поиске силы трения и силы, возникающей вследствие наклона, генетический оптимизатор одновременно находит модель системы, которая создает наименьшую силу из-за наклона. Генетические алгоритмы базируются на принципе создания искусственной эволюции с использованием логических схем процессора. Рассматриваемым вопросом является то, как получить как можно более выгодный конечный результат ("фенотип"), изменяя свойства "популяции". Используемыми в процессе вариации генетическими операциями являются "отбор", "гибридизация" и "мутация". Самые сильные члены популяции "добиваются успеха" и их свойства передаются следующим поколениям. В примере способа данного изобретения популяцией является множество векторов параметров модели. В таком контексте один вектор параметра соответствует одной хромосоме. Каждая хромосома имеет гены. Каждый ген в этом контексте соответствует одному из оцениваемых параметров модели, которыми теперь являются работа устройства закрывания, сила трения двери и сила, возникающая из-за наклона двери. Эти три гена вместе можно назвать фенотипом. Функционирование генетического алгоритма является таким, что сначала создается популяция со значениями генов, отобранными случайным образом. Для каждой хромосомы в популяции рассчитывается "эффективность" или значение качества, которое в этом примере является вышеописанной суммой квадратов ошибок, вычисляемой на основании динамической модели двери. В генетическом алгоритме поиск происходит поколение за поколением. Из каждого поколения отбираются и включаются в следующее поколение самые эффективные хромосомы, то есть те,которые дают самое низкое значение суммы квадратов ошибок. Из лучших вариантов после этого отбора посредством гибридизации и мутации создается следующее поколение. В результате генетических операций получается новый вид популяции, в котором генотип хромосом отличается от более ранней популяции полностью или только в некоторых из генов. Для нового поколения определяется эффективность,то есть вычисляются суммы квадратов ошибок, и хромосома, имеющая лучшую эффективность, снова получается в качестве результата. После этого, последовательность ряда сумм квадратов ошибок проверяется, чтобы увидеть, сходится ли она, и достаточное ли число поколений было обработано, чтобы гарантировать сходимость. Как конечный результат, гены лучшего индивидуума в последнем поколении показывают величины неизвестных сил и состояние работоспособности устройства закрывания. Функционирование вышеописанного генетического алгоритма может комбинироваться с обеими схемами фиг. 2 и 3. Схема на фиг. 4 представляет принцип работы посредством примера, когда генетический алгоритм объединяется со схемой фиг. 2. В автоматической двери 40 измеряются ток электродвигателя двери и тахометрический импульсный сигнал электродвигателя. В блоке 41 предварительной обработки рассчитывается скорость двери, и результат подается в блок 43 вычисления разности и в модель 42 двери. В этом примере масса двери принимается постоянной. В модели оценивается скорость двери и аналогично подается в блок 43 вычисления разности. Устройство 44 для вычисления суммы квадратов ошибок и так называемый оптимизатор 45 на основе генетического алгоритма формируют петлю, работа которой была описана выше в связи с описанием генетического алгоритма. Информация о генах передается из оптимизатора 45 на основе генетического алгоритма в устройство 44 для вычисления ошибки и,соответственно, значение эффективности, то есть сумма квадратов ошибок Е, подается из устройства 44 для вычисления погрешности в оптимизатор 45 на основе генетического алгоритма. В качестве конечного результата поиска оптимизатор дает параметры CD, Fdoor и Ftilt. CD означает состояние работоспособности устройства закрывания, в котором, например, значение единица может представлять надежную работу устройства закрывания, а нуль - отказ устройства закрывания. Эти три параметра возвращаются назад в модель, так что модель немедленно принимает в расчет работоспособность устройства закрывания. Таким образом, в дополнение к параметрам сил немедленно находится модель, которая лучше всего описывает систему. Команды открывания и зарывания двери приходят от системы 46 управления две-6 009189 рью. Теперь динамическая модель двери имеет следующий вид: где член CD является единицей, когда устройство закрывания находится в работе, и равен нулю, когда устройство закрывания не работает. Чтобы генетический алгоритм был способен находить модель системы, которая дает наименьший угол наклона, сила наклона Ftilt также включается в функцию ошибки где K - коэффициент масштабирования, G - порядковый номер поколения в генетическом алгоритме и G1 - предельное значение для поколения G, после которого сила наклона более не включается в функцию ошибки (10). Результатом такой схемы является то, что на ранней стадии поиска, когда GG1,поиск находит правильную модель системы, в то время как в течение окончательной стадии параметрамFm и Ftilt даются более точные значения. На практике, когда используется генетический алгоритм, период времени, в течение которого масса двери может быть определена достаточно точно, необходим в связи с пуском системы. Во время периода обучения предполагается, что устройство закрывания находится в работе, и после первого цикла работы двери определяются значения md, FDoor и Ftilt. Вычисление повторяется после достаточного числа циклов работы двери до тех пор, пока не будет найдено достаточного схождения расчетного значения массы двери. После этого периода обучения система используется в режиме контроля фактического состояния,в котором масса двери принимается постоянной, в то время как параметр CD - нет. Это состояние работоспособности было описано выше в связи с описанием фиг. 4. В качестве примера мы можем рассмотреть силу трения F, когда устройство закрывания исключено из системы (CD=0). Сила трения обычно ограничивается до немного более низкого уровня. Это обусловлено тем фактом, что и движению противовеса и движению каната, соединяющего противовес с дверью, оказывается сопротивление силами трения. Поэтому, когда противовес не включается в систему,полное трение, действующее на дверь, уменьшается. При долговременном измерении силы трения, действующей на дверь, можно контролировать скорость изменения трения. Когда скорость изменения силы трения, вызванного износом во время нормального режима эксплуатации, известна, можно выяснить, имел ли место какой-либо необычно интенсивный износ к моменту наблюдения, или есть ли какая-либо другая причина подозревать внезапный отказ. На основании поведения силы трения (обычно равномерного увеличения), наблюдаемого в течение длительного временного интервала, можно найти и оценить момент времени, когда риск отказа превысит заданный предел риска. Если сила трения возрастает скачкообразно в данный момент времени, имеется причина подозревать серьезную неисправность в отношении функциональных возможностей системы. Если, кроме того,во время движения двери слышен дополнительный шум, то это почти определенно может быть расценено как ситуация неисправности. Выводы могут также делаться на основании особенностей поведения величины силы трения после ступенчатого скачка, подобного этому. Сила может оставаться постоянной или же равномерно увеличиваться либо уменьшаться. Когда новая автоматическая дверь вводится в эксплуатацию, ее работа начинается с так называемого периода обкатки, во время которого параметры, получаемые от оптимизатора, могут несколько изменяться как функция времени. После периода обкатки следует период полезной устойчивой работы, когда параметры системы (двери) остаются практически постоянными в течение длительного времени. С другой стороны во время периода устойчивой работы значения параметра обычно также могут быть лучше,чем значения параметра во время периода обкатки. После периода устойчивой работы начинает происходить некоторое ослабление перемещающихся частей и некоторое растяжение частей, склонных к растяжению. Например, ролики, направляющие движение двери по направляющей, могут пластически деформироваться или подвергнуться износу до такой степени, что некоторые из роликов больше не будут находиться в контакте с дверью. Возрастание трения может являться результатом многих различных причин. Грязь накапливается на направляющей двери, формируя препятствие для плавного перемещения двери по направляющей. С другой стороны, в местах, где из-за трения требуется смазка, может использоваться слишком много смазочных материалов, и поэтому дверь не будет двигаться необходимым образом. Грязь особенно легко накапливается на пороге, когда пассажиры лифта часто наступают на него при входе в кабину лифта. Неисправность электродвигателя естественно обнаруживается на основании параметров, полученных способом данного изобретения. Изнашивание каната между противовесом и дверью также проявляется как увеличенное значение параметра FDoor. Импульсовидное увеличение трения может быть следствием внешнего механического толчка, прикладываемого к двери, такого как, например, жесткий удар, когда предметы загружают в кабину. Неисправность в подвеске двери может также вызывать внезапное увеличение силы трения. Это может также произойти из-за проволоки, разорванной в канате закрывающего груза. Если в дополнение к изменению силы трения из системы слышен какой-либо дополнительный-7 009189 шум, то персонал технического обслуживания должен быть немедленно вызван на это место. Если величина силы трения остается постоянной после импульсовидного увеличения трения, то эта ситуация должны быть принята во внимание в связи со следующим запланированным циклом технического обслуживания системы лифта, но немедленные действия в этой ситуации не обязательны. Износ компонентов, входящих в состав автоматических дверей, вызывает медленное ухудшение эксплуатационных показателей, которые могут быть существенными или незначительными для правильной работы двери. Если обнаруживается увеличенная дисперсия (среднеквадратическое отклонение) силы трения, то можно сделать вывод, что развивается износ механизма двери. Зазор компонентов увеличивается, и пути движущихся частей постепенно начинают существенно отличаться от новой системы двери с малыми допусками. Средняя величина силы трения может оставаться вполне устойчивой, даже если дисперсия увеличивается. Ситуация может также включать повышение уровня шума, создаваемого при движении. Дисперсия может рассматриваться как показатель степени износа. Время года может влиять на параметры системы двери, полученные в связи с контролем состояния. Если дверь подвергается воздействию экстраординарного нагрева, холода или влажности, эти изменения условий также могут отражаться на трении, действующем на дверь. Из-за большой интенсивности движения электродвигатель может также выделять дополнительное тепло, что вызывает уменьшение его мощности. В этом случае система интерпретирует ситуацию как увеличенное трение, но действительной причиной является уменьшение мощности электродвигателя. Точно так же первые циклы работы двери утром могут давать более высокие значения трения, чем обычно, потому что на самом деле система испытывает "холодный пуск" после ночного перерыва в работе. Примером изменчивого влияния окружающей среды, действующего на двери на различных этажах, являются перепады воздушного давления на уровнях различных этажей. Вентиляционная установка может производить в направлении двери воздушный поток различной величины в зависимости от этажа, на котором расположена рассматриваемая дверь. Основной способ обнаружения дефектной двери состоит в том, чтобы сравнивать параметры Ftilt иFDoor для дверей различных этажей. Если Ftilt для одного из этажей существенно отличается от общей нормы, можно сделать вывод, что угол монтажа двери посадочной площадки на рассматриваемом этаже отличается от других дверей. С другой стороны, значение FDoor, существенно отклоняющееся от других этажей, может показать, что ролики регулировки двери посадочной площадки были установлены отлично от других дверей. Одним из преимуществ данного изобретения является то, что информация, касающаяся работы двери, может быть сохранена. Этим путем создается база данных, охватывающая историю эксплуатации двери, на основании которой можно планировать, например, подходящую дату следующего технического обслуживания. Из истории эксплуатации может быть непосредственно сделан вывод о текущем состоянии работы двери, а также могут быть предсказаны вероятность отказа и потребность в техническом обслуживании в будущий момент времени. Кроме того, из базы данных можно сделать вывод о том, какова продолжительность периода обкатки, и какую длительность имеет период стабильной работы двери. Влияние операций технического обслуживания также может быть выяснено из базы данных. Для специалистов в данной области техники будет очевидно, что изобретение не ограничивается описанными выше формами осуществления, где изобретение было описано в качестве примера, но что различные формы осуществления изобретения возможны в пределах объема изобретения, определяемого в представленной ниже формуле изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ контроля состояния автоматической двери в здании, отличающийся тем, что он включает измерение ускорения или скорости двери и крутящего момента электродвигателя двери, приводящего дверь в движение; создание динамической модели двери, которая содержит в качестве своей части силы, действующие на дверь; моделирование ускорения или скорости двери с использованием динамической модели двери; вычисление компонента ошибки как разности между измеряемыми и оцениваемыми значениями ускорения или скорости двери; вычисление силы трения, прикладываемой к двери, с помощью минимизации вышеупомянутого компонента ошибки или выражения, выводимого из него и содержащего этот компонент ошибки; и получение вывода о состоянии работоспособности двери путем сравнения вычисленной силы трения и ее изменения с номинальными значениями. 2. Способ по п.1, отличающийся тем, что включает измерение ускорения двери с помощью датчика ускорения. 3. Способ по любому из предшествующих пп.1, 2, отличающийся тем, что дополнительно включает измерение скорости двери с использованием сигнала, пропорционального скорости, получаемого от электродвигателя двери.-8 009189 4. Способ по любому из предшествующих пп.1-3, отличающийся тем, что включает использование в качестве параметров в динамической модели одного или нескольких из следующих параметров: скорости двери, тока электродвигателя, приводящего в движение дверь, коэффициента крутящего момента электродвигателя, трения в электродвигателе, силового коэффициента пружины закрывания двери и массы груза закрывания двери; моделирование ускорения и скорости двери в модели как функции одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери; вычисление первой функции ошибки как разности между измеренной мгновенной скоростью двери и мгновенной скоростью двери, смоделированной в модели; вычисление второй функции ошибки возведением в квадрат первой функции ошибки и суммированием возведенных в квадрат первых функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов; вычисление одного или нескольких из следующих параметров: массы двери, силы трения, прикладываемой к двери, и силы, вызванной углом наклона двери, с помощью минимизации второй функции ошибки; и подачу вычисленных параметров обратно в динамическую модель для использования в следующем цикле вычисления. 5. Способ по любому из предшествующих пп.1-4, отличающийся тем, что включает использование в качестве параметров в динамической модели одного или нескольких из следующих параметров: скорости двери, тока электродвигателя, приводящего в движение дверь, коэффициента крутящего момента электродвигателя, трения в электродвигателе, силового коэффициента пружины закрывания двери и массы груза закрывания двери; моделирование ускорения двери в модели как функции одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери; вычисление третьей функции ошибки как разности между измеренным мгновенным ускорением двери и мгновенным ускорением двери, смоделированным в модели; вычисление четвертой функции ошибки возведением в квадрат третьей функции ошибки и суммированием возведенных в квадрат третьих функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов; вычисление одного или нескольких из следующих параметров: массы двери, силы трения, прикладываемой к двери, и силы, вызванной углом наклона двери, с помощью минимизации четвертой функции ошибки; и подачу вычисленных параметров обратно в динамическую модель для использования в следующем цикле вычисления. 6. Способ по любому из предшествующих пп.1-5, отличающийся тем, что включает определение значения массы двери при пуске системы и установление массы двери в качестве константы в динамической модели двери. 7. Способ по любому из предшествующих пп.1-6, отличающийся тем, что включает использование генетического алгоритма для обнаружения отказа устройства закрывания двери; использование в генетическом алгоритме хромосомы, которая состоит из генов, описывающих работу устройства закрывания, силу трения, прикладываемую к двери, и силу, вызванную углом наклона двери; использование квадратичной функции ошибки как значения качества генетического алгоритма; и использование динамической модели двери при определении фенотипа генетического алгоритма. 8. Система для контроля состояния автоматической двери лифта или здания, содержащая по крайней мере одну дверь (20, 30, 40), которая перемещается горизонтально на месте ее установки и систему(26, 36, 46) управления для открывания и закрывания двери, отличающаяся тем, что она содержит средства (20, 30, 40) для измерения ускорения или скорости двери и крутящего момента электродвигателя, приводящего дверь в движение; динамическую модель (22, 32, 42) двери, включающую силы, действующие на дверь; средства (22, 32, 42) для моделирования ускорения или скорости двери с использованием динамической модели двери; средства (23, 33, 43, 24, 34, 44) для вычисления компонента ошибки с использованием информации об измеренных и смоделированных ускорении или скорости двери; средства (25, 35, 45) для вычисления силы трения, прикладываемой к двери, путем минимизации вышеупомянутого компонента ошибки или выражения, выведенного из него и содержащего этот компонент ошибки; и средства (26, 35, 46) выведения заключения о состоянии работоспособности двери путем сравнения измеренной силы трения и ее изменения с номинальными значениями. 9. Система по п.8, отличающаяся тем, что дополнительно содержит плату (26, 36, 46) управления-9 009189 дверью в качестве системы управления дверью. 10. Система по любому из предшествующих пп.8, 9, отличающаяся тем, что содержит датчик (30,40) ускорения в качестве средства измерения ускорения двери. 11. Система по любому из предшествующих пп.8-10, отличающаяся тем, что содержит пропорциональный скорости и получаемый от электродвигателя двери сигнал (20), используемый как средство измерения скорости vd двери. 12. Система по любому из предшествующих пп.8-11, отличающаяся тем, что содержит средства для определения одного или нескольких параметров динамической модели (22) посредством операций, включающих измерение скорости vd двери, измерение тока электродвигателя, приводящего дверь в движение, определение коэффициента крутящего момента электродвигателя, определение трения в электродвигателе, определение силового коэффициента пружины закрывания двери и измерение массы груза закрывания двери; средства для моделирования скорости двери в динамической модели (22), где упомянутая скорость задается как функция одного или нескольких параметров, которыми являются масса двери, сила трения,прикладываемая к двери, и сила, вызванная углом наклона двери; средства (23) для вычисления первой функции ошибки, которая получается как разность между измеренной мгновенной скоростью двери и мгновенной скоростью двери, смоделированной в модели; средства (24) для вычисления второй функции ошибки, которая получается возведением в квадрат первой функции (23) ошибки и суммированием возведенных в квадрат первых функций ошибки, полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов(21); первые средства (25) оптимизации для минимизации второй функции ошибки (24), которые вычисляют один или несколько из следующих параметров: массу двери, силу трения, прикладываемую к двери, и силу, вызванную углом наклона двери; и первую обратную связь для подачи вычисленных параметров в динамическую модель (22) для использования в следующем цикле вычисления. 13. Система по любому из предшествующих пп.8-12, отличающаяся тем, что содержит средства для определения одного или нескольких параметров динамической модели (32) посредством операций, включающих измерение ускорения двери, измерение тока электродвигателя, приводящего дверь в движение, определение коэффициента крутящего момента электродвигателя, определение трения в электродвигателе, определение силового коэффициента пружины закрывания двери и измерение массы груза закрывания двери; средства для моделирования ускорения двери в динамической модели (32), где упомянутое ускорение определяется как функция одного или нескольких параметров, которыми являются масса двери, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери; средства (33) для вычисления третьей функции ошибки, которая получается как разность между измеренным мгновенным ускорением двери и мгновенным ускорением двери, смоделированным в модели; средства (34) для вычисления четвертой функции ошибки, которая получается возведением в квадрат третьей функции (33) ошибки и суммированием возведенных в квадрат третьих функций ошибки,полученных в течение заданного периода времени, с использованием необходимых весовых коэффициентов (31); вторые средства (35) оптимизации для минимизации четвертой функции (34) ошибки, которые вычисляют один или несколько из следующих параметров: массу двери, силу трения, прикладываемую к двери, и силу, вызванную углом наклона двери; и вторую обратную связь для подачи вычисленных параметров в динамическую модель (32) с целью их использования в следующем цикле вычисления. 14. Система по любому из предшествующих пп.8-13, отличающаяся тем, что содержит третьи средства (45) оптимизации для использования генетического алгоритма с целью обнаружения отказа устройства закрывания двери; вышеупомянутые третьи средства (45) оптимизации для использования одного или нескольких параметров в генетическом алгоритме в качестве генов хромосомы, причем этими параметрами являются работа устройства закрывания, сила трения, прикладываемая к двери, и сила, вызванная углом наклона двери; вышеупомянутые третьи средства (45) оптимизации для использования квадратичной функции (44) ошибки в качестве значения качества генетического алгоритма; и вышеупомянутые третьи средства (45) оптимизации для использования динамической модели (42) двери при определении фенотипа генетического алгоритма.
МПК / Метки
МПК: B66B 13/00, B66B 5/00
Метки: устройство, лифта, двери, контроля
Код ссылки
<a href="https://eas.patents.su/13-9189-ustrojjstvo-dlya-kontrolya-dveri-lifta.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство для контроля двери лифта</a>
Устройство для перемещения двери лифта
Номер патента: 8456
Опубликовано: 29.06.2007
Авторы: Тюков Анатолий Владимирович, Рудник Петр Михайлович, Балабанов Игорь Николаевич, Комоза Виктор Федорович, Денисов Евгений Герасимович
МПК: B66B 13/12
Метки: перемещения, лифта, устройство, двери
Формула / Реферат:
1. Устройство для перемещения двери лифта, содержащее привод с барабаном, связанным с гибким приводным элементом, обводные ролики для прокладки гибкого приводного элемента, запорное устройство двери шахты и устройство синхронизации перемещения дверей кабины и шахты лифта, отличающееся тем, что двери кабины также снабжены запорным устройством, кинематически связанным с устройством синхронизации, установленным на двери шахты, и с механизмом...
Запирающее устройство двери вм
Номер патента: 391
Опубликовано: 24.06.1999
Автор: Маловичко Владимир Валентинович
МПК: E05C 9/00
Метки: двери, устройство, запирающее
Формула / Реферат:
1. Запирающее устройство двери, содержащее подвижные детали в виде приводной поворотной пластины и ригелей, смонтированных на двери с возможностью взаимодействия с приводной поворотной пластиной и перемещения вдоль своей оси, по меньшей мере, один закрепленный на одной из подвижных деталей упор и запирающий элемент в виде полосы, шарнирно установленной на двери с возможностью взаимодействия с подвижным элементом средства фиксации двери в...
Устройство для запирания проема в здании, в частности окна или двери
Номер патента: 4010
Опубликовано: 25.12.2003
Автор: Шнайдер Йозеф
МПК: E06B 3/30
Метки: проема, здании, окна, запирания, устройство, двери, частности
Формула / Реферат:
1. Устройство для запирания проема в здании, в частности окна или двери, с коробкой и переплетом, причем коробка имеет изолирующее устройство предкамеры, которая по меньшей мере частично покрывает край стекла параллельно плоскости стекла, отличающееся тем, что устройство предкамеры (5) частично в известной мере смещено назад параллельно плоскости (Е) стекла и смещенная назад параллельно плоскости (Е) стекла часть по всей высоте или частично...
Устройство, обеспечивающее открытие и фиксацию створки окна или двери
Номер патента: 3593
Опубликовано: 26.06.2003
Автор: Шлютер Генрих
МПК: E05D 15/58
Метки: окна, устройство, открытие, створки, двери, обеспечивающее, фиксацию
Формула / Реферат:
1. Устройство, обеспечивающее открытие и фиксацию створки (1) окна или двери, перемещающейся относительно рамы (2) окна или двери, которая (створка) посредством упомянутого устройства может быть параллельно выдвинута, и из параллельно выдвинутого положения через ось вращения (D, 40, 64, 90, 112, 144, 150, 155, 174) повернута в положение раскрытия за счет поворота, причем для параллельного выдвижения створки (1) в пазу между рамой и створкой...
Устройство для натяжения каната лифта
Номер патента: 6912
Опубликовано: 28.04.2006
Авторы: Ауланко Эско, Мусталахти Йорма
МПК: B66B 7/06, B66B 7/10, B66B 11/00...
Метки: натяжения, каната, лифта, устройство
Формула / Реферат:
1. Лифт, кабина которого подвешена посредством грузоподъемных канатов, состоящих из одиночного каната или нескольких параллельных канатов, имеющий канатоведущий шкив, который перемещает кабину лифта посредством подъемных канатов, отличающийся тем, что лифт имеет участки канатов, идущие вверх и вниз от кабины лифта, причем участки канатов, идущие вверх от кабины лифта, находятся под первым натяжением (T1) каната, которое превышает второе...
Предыдущий патент: Экран для управления выходом песка в стволе скважины
Следующий патент: Устройство для интенсификации добычи высоковязкой нефти
Случайный патент: Цельное интравагинальное кольцо, содержащее прогестерон, и способ изготовления и применения такого кольца