Распределенные логические функции для улучшенного мониторинга и управления технологическими процессами нефтепромысла
Формула / Реферат
1. Способ управления работой периферийного бурового оборудования, в котором
получают первый параметр первого компонента буровых работ, связанного с работой периферийного бурового оборудования, по беспроводной сети;
получают второй параметр второго компонента буровых работ, связанного с работой периферийного бурового оборудования, причем второй компонент буровых работ расположен выше или ниже по потоку от первого компонента буровых работ;
генерируют сигнал управления для первого компонента буровых работ на основании первого параметра и второго параметра;
передают сигнал управления на первый компонент буровых работ по беспроводной сети, при этом первый компонент буровых работ регулируют на основании сигнала управления для управления работой периферийного бурового оборудования.
2. Способ по п.1, в котором первый компонент буровых работ и второй компонент буровых работ представляют собой по меньшей мере один, выбранный из группы, состоящей из вибросита, дегазатора, пескоотделителя, илоотделителя, центрифуги или смесительной воронки.
3. Способ по п.1, в котором первый параметр первого компонента буровых работ или второй параметр второго компонента буровых работ представляет собой по меньшей мере один, выбранный из группы, состоящей из температуры, вязкости, измерения силы, pH, твердости горной породы, текущего наклона деки вибросита, текущего уровня бурового раствора.
4. Способ по п.1, в котором получают второй параметр по беспроводной сети.
5. Способ по п.1, в котором дополнительно запрашивают пользователя для подтверждения или отмены передачи сигнала управления на первый компонент буровых работ.
6. Способ по п.1, в котором работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении.
7. Способ по п.1, в котором работа периферийного бурового оборудования выбирается из группы, состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора.
8. Способ по п.1, в котором беспроводная сеть содержит сотовую ячеистую сеть.
9. Система управления работой периферийного бурового оборудования, содержащая
первый микроконтроллер, выполненный с возможностью
получения первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования;
передачи первого параметра на модуль управления системой по беспроводной ячеистой сети;
модуль управления системой, выполненный с возможностью
задавать сигнал управления для первого компонента буровых работ, на основании первого параметра и второго параметра второго компонента буровых работ, связанных с работой периферийного бурового оборудования;
передавать сигнал управления на первый микроконтроллер по беспроводной ячеистой сети,
при этом первый микроконтроллер выполнен с возможностью регулирования первого компонента буровых работ на основании сигнала управления для управления работой периферийного бурового оборудования.
10. Система по п.9, в которой первый компонент буровых работ и второй компонент буровых работ представляют собой по меньшей мере один, выбранный из группы, состоящей из вибросита, дегазатора, пескоотделителя, илоотделителя, центрифуги или смесительной воронки.
11. Система по п.9, в которой первый параметр первого компонента буровых работ или второй параметр второго компонента буровых работ представляет собой по меньшей мере один, выбранный из группы, состоящей из температуры, вязкости, измерения силы, pH, твердости горной породы, текущего наклона деки вибросита, текущего уровня бурового раствора.
12. Система по п.9, дополнительно содержащая второй микроконтроллер, выполненный с возможностью получения второго параметра и сообщения второго параметра на модуль управления системой по беспроводной ячеистой сети.
13. Система по п.9, в которой модуль управления системой дополнительно выполнен с возможностью запроса пользователя для подтверждения или отмены передачи сигнала управления на первый компонент буровых работ.
14. Система по п.9, в которой работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении.
15. Система по п.9, в которой работа периферийного бурового оборудования выбирается из группы, состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора.
16. Способ управления работой периферийного бурового оборудования, содержащий
получение первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования;
получение второго параметра второго компонента буровых работ, связанного с работой периферийного бурового оборудования, причем второй компонент буровых работ расположен выше или ниже по потоку от первого компонента буровых работ;
передачу первого параметра на микроконтроллер, связанный со вторым компонентом буровых работ, по беспроводной сети;
регулирование второго компонента буровых работ на основании первого параметра и второго параметра для управления работой периферийного бурового оборудования.
17. Способ по п.16, дополнительно содержащий запрос пользователя для подтверждения или отмены регулирования второго компонента буровых работ.
18. Способ по п.16, в котором работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении.
19. Способ по п.16, в котором работа периферийного бурового оборудования выбирается из группы, состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора.
20. Способ по п.16, в котором беспроводная сеть содержит сотовую ячеистую сеть.
21. Система управления работой периферийного бурового оборудования, содержащая
первый микроконтроллер, выполненный с возможностью получения первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования, и передачи первого параметра на второй микроконтроллер по беспроводной сети;
второй микроконтроллер, выполненный с возможностью получения второго параметра второго компонента буровых работ, связанного с процессом бурения, и регулирования второго компонента буровых работ на основании первого параметра и второго параметра.
22. Система по п.21, в которой второй микроконтроллер дополнительно выполнен с возможностью запроса пользователя для подтверждения или отмены регулирования второго компонента буровых работ.
23. Система по п.21, в которой работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении.
24. Система по п.21, в которой работа периферийного бурового оборудования выбирается из группы, состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора.
25. Система по п.21, в которой беспроводная сеть содержит сотовую ячеистую сеть.
Текст
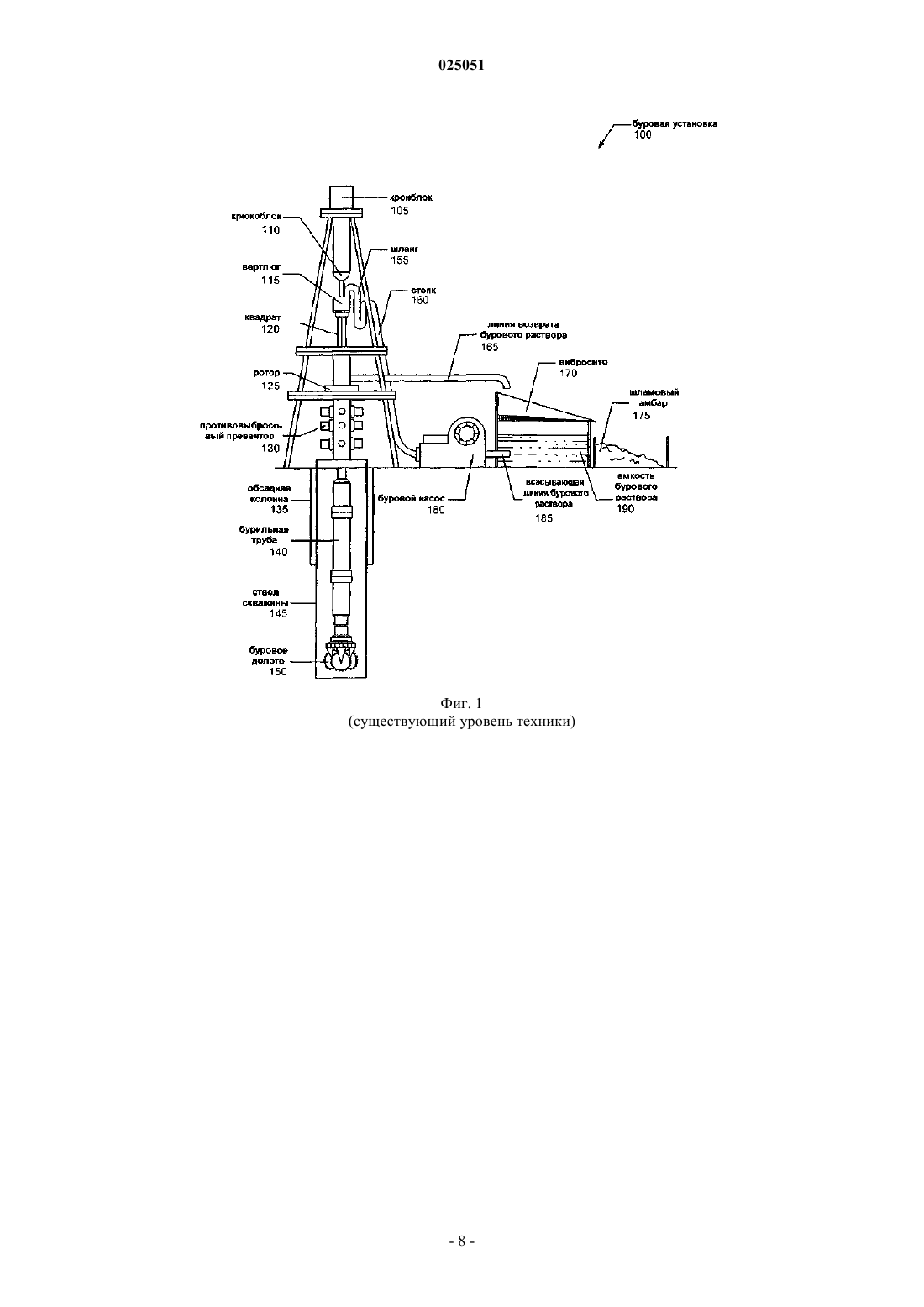
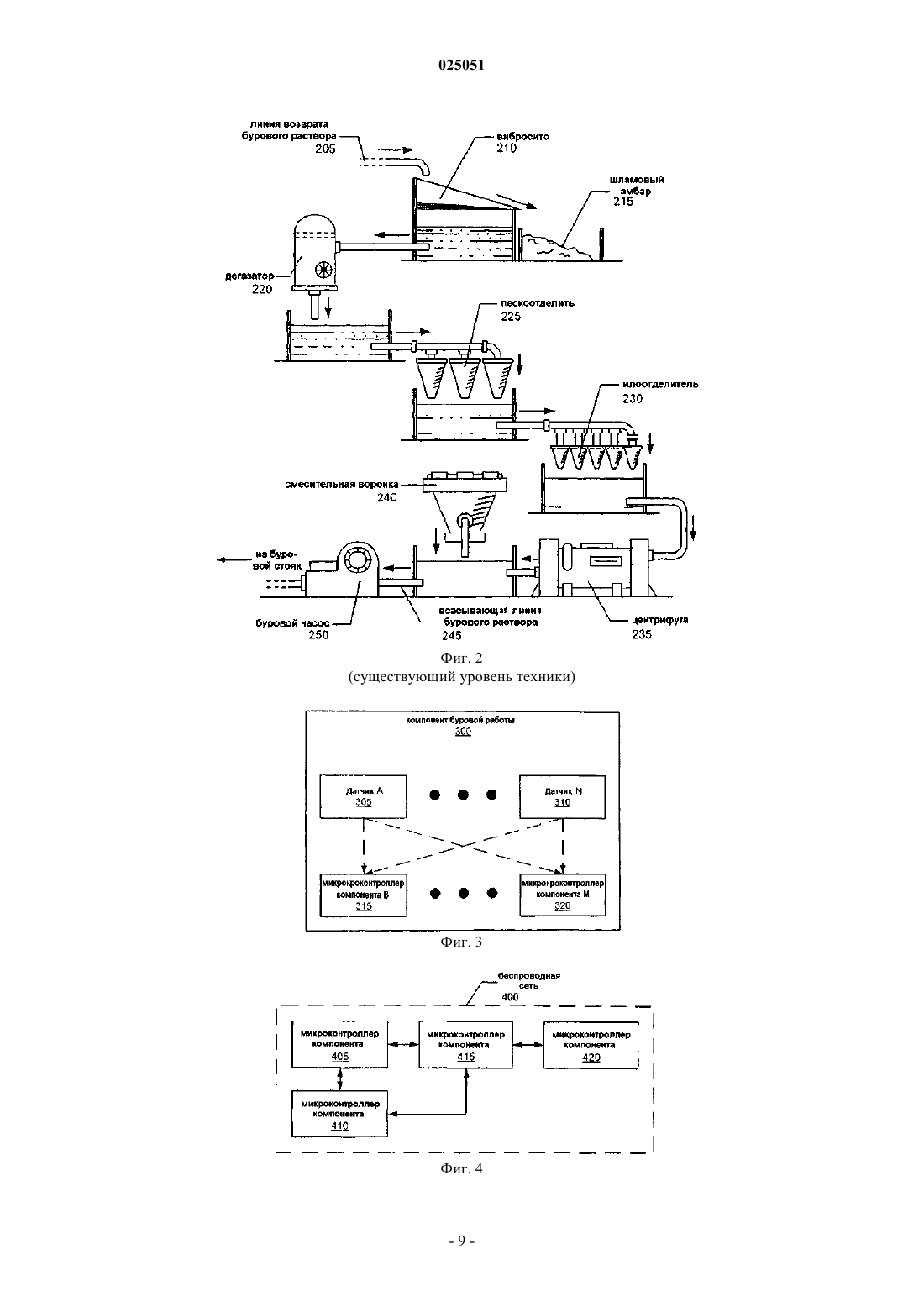
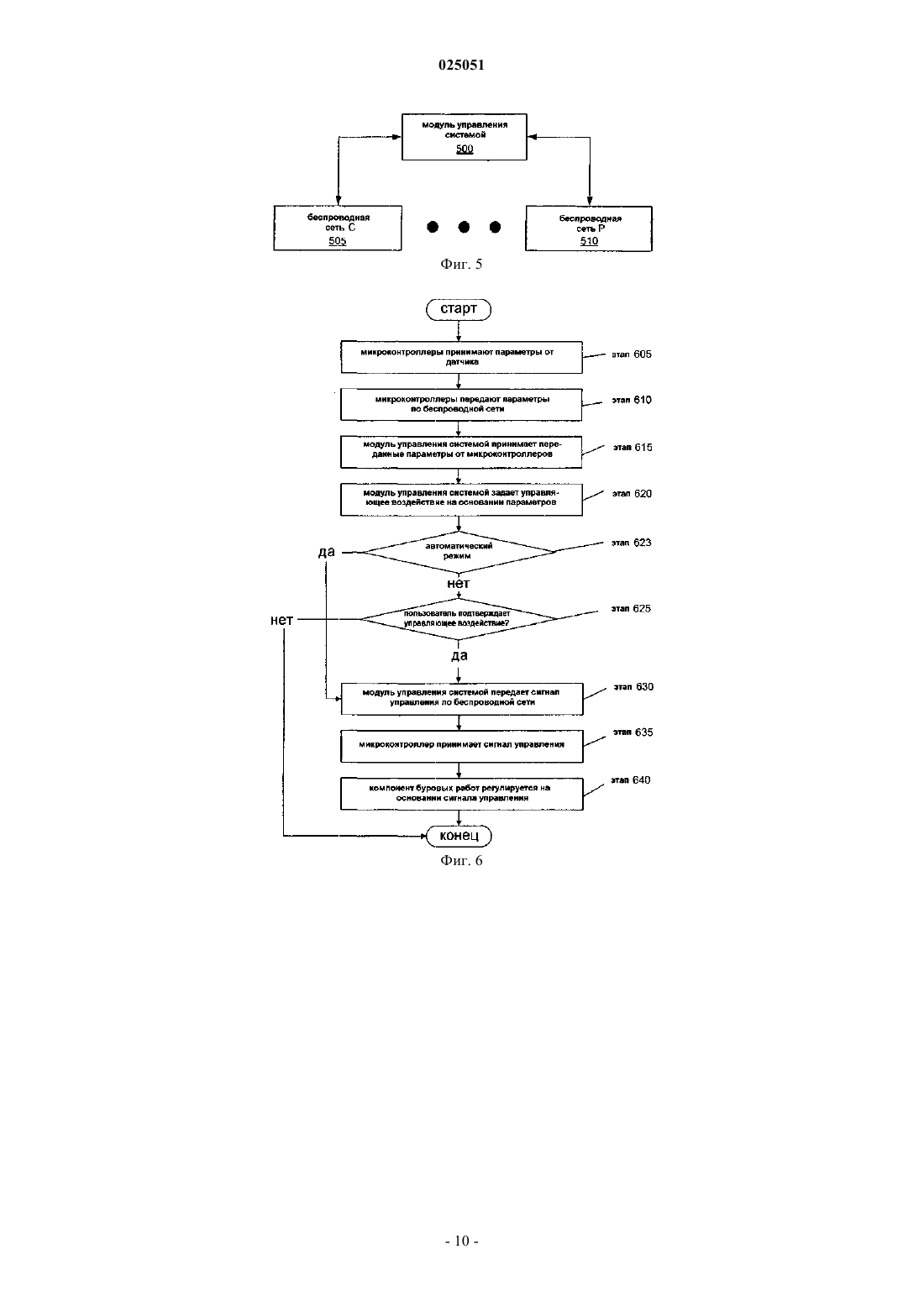
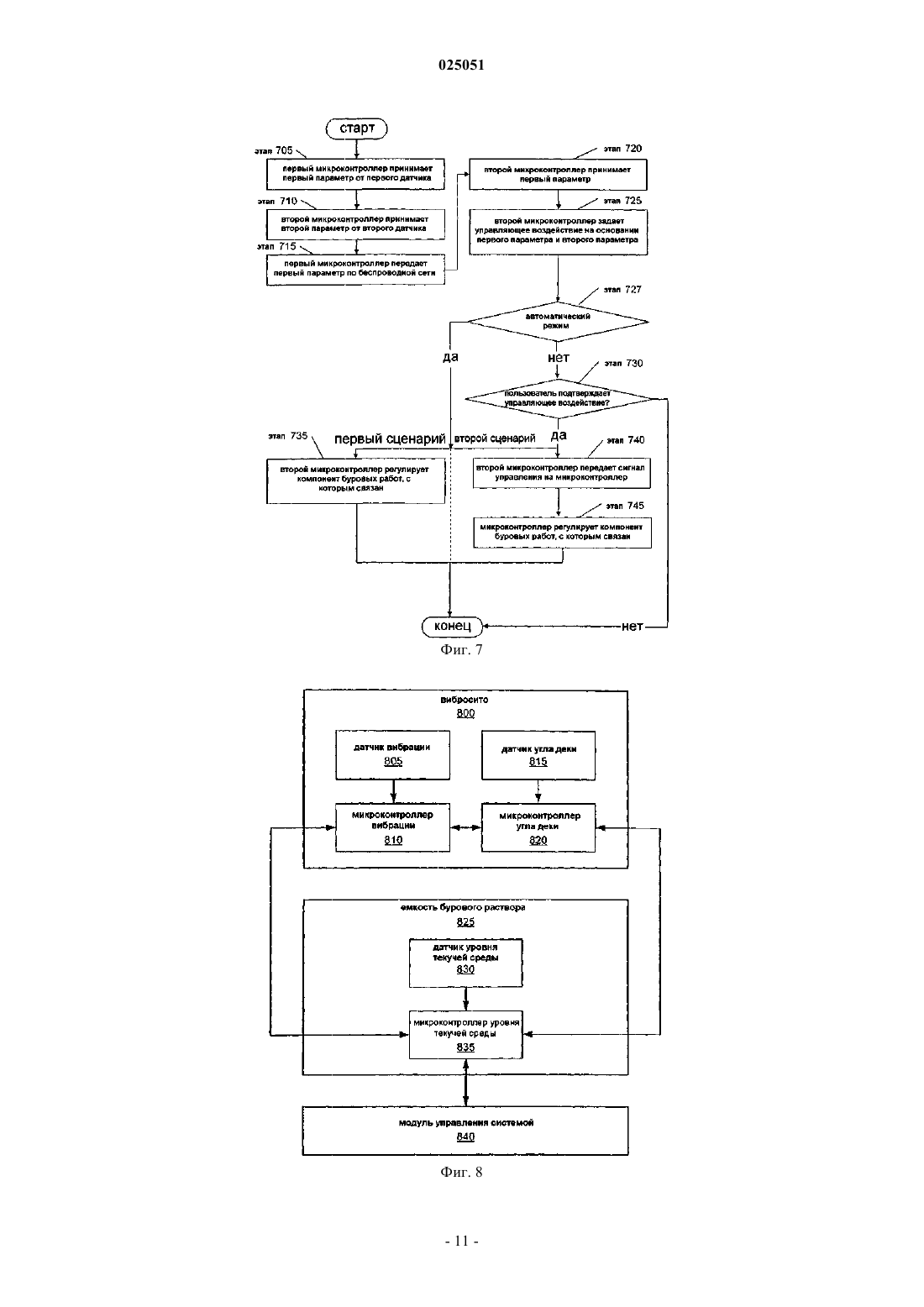
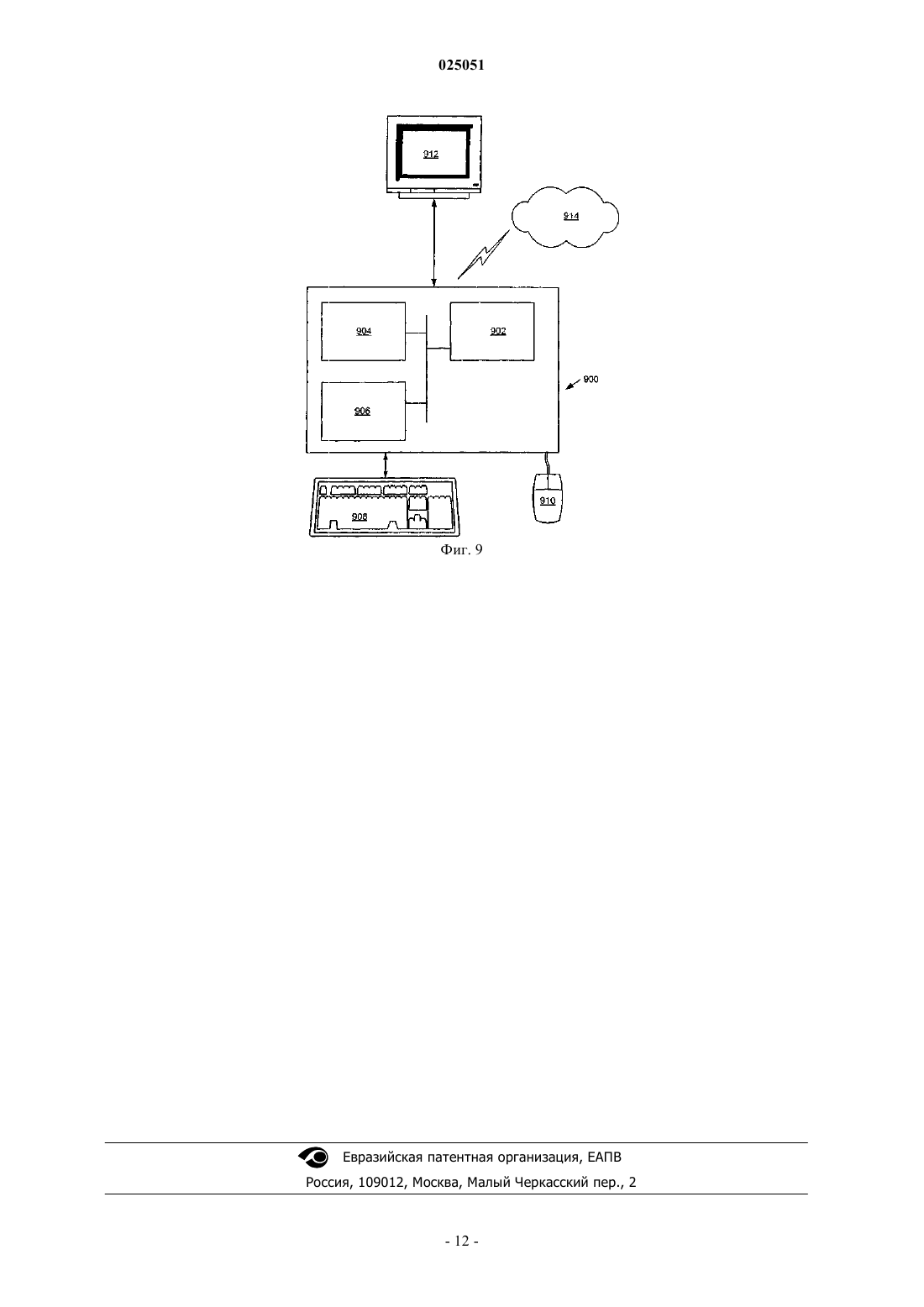
РАСПРЕДЕЛННЫЕ ЛОГИЧЕСКИЕ ФУНКЦИИ ДЛЯ УЛУЧШЕННОГО МОНИТОРИНГА И УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ НЕФТЕПРОМЫСЛА Способ управления работой периферийного бурового оборудования включает в себя получение первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования, по беспроводной сети, получение второго параметра второго компонента буровых работ, связанного с работой периферийного бурового оборудования, генерирование сигнала управления для первого компонента буровых работ, на основании первого параметра и второго параметра, и передачу сигнала управления на первый компонент буровых работ по беспроводной сети, при этом первый компонент буровых работ регулируют на основании сигнала управления для управления работой периферийного бурового оборудования. Область техники изобретения Варианты осуществления, раскрываемые в данном документе, относятся, в общем, к способам и системам, включающим в себя управление работой периферийного бурового оборудования. Уровень техники изобретения На фиг. 1 показан пример схемы системы бурения для бурения геологического пласта. Рядовым специалистам в данной области техники должно быть ясно, что также существует некоторое число других типов систем бурения - например, подводного бурения на большой глубине. Конкретно, на фиг. 1 показана схема буровой установки (100), используемой для вращения бурового долота (150), сцепленного с дальним концом (т.е. концом, самым дальним в глубину от поверхности земли) бурильной трубы(140) в стволе (145) скважины. Система бурения может использоваться для получения нефти, природного газа, воды или любых других материалов, которые возможно получить с помощью бурения. Конкретно, бурильная труба (140) выполнена с возможностью передачи энергии вращения, создаваемой ротором (125) с буровой установки (100) на буровое долото (150), и передачи буровой текучей среды через проходное отверстие бурильной трубы (140) на буровое долото (150). Буровую текучую среду можно также именовать "буровым раствором". Буровой насос (180) используют для передачи бурового раствора через стояк (160), шланг (155) и квадрат (120) в бурильную трубу (140). При бурении давление в стволе (145) скважины может приводить к выбросу, т.е. неуправляемому потоку текучих сред, который может достигать поверхности земли. В некоторых случаях выброс может быть таким мощным, что наносит травмы работающим на буровой установке (100) и может вывести буровую установку (100) из строя. Соответственно, можно использовать противовыбросовый превентор(130) для управления давлением текучей среды в стволе (145) скважины. Дополнительно, ствол (145) скважины можно крепить с использованием обсадной колонны (135) для предотвращения разрушения вследствие выброса или других сил, действующих на ствол (145) скважины. Буровая установка (100) может также включать в себя другие компоненты, такие как кронблок(105), крюкоблок (110), вертлюг (115) и другие компоненты, которые не показаны. Буровой раствор, возвращающийся на поверхность из ствола (145) скважины, направляется на оборудование очистки бурового раствора по линии (165) возвращения бурового раствора. Например, буровой раствор может быть направлен на вибросито (170), выполненное с возможностью удаления твердых частиц выбуренной породы из бурового раствора. Удаленные твердые частицы перемещаются в шламовый амбар (175), в то время как буровой раствор размещается в емкости (190) бурового раствора. Буровой насос (180) выкачивает отфильтрованный буровой раствор из емкости (190) бурового раствора по всасывающей линии (185) бурового раствора и вновь нагнетает отфильтрованный буровой раствор в буровую установку (100). В некоторых случаях могут использовать другие устройства очистки бурового раствора. На фиг. 2 показан пример схемы расположения устройств очистки бурового раствора. Как описано выше, буровой раствор приходит на вибросито (210) по линии (205) возврата бурового раствора. Твердые частицы, удаленные виброситом, перемещаются в шламовый амбар (215). Буровой раствор затем перемещается в дегазатор (220), выполненный с возможностью удаления воздуха или других газов из бурового раствора. Дополнительные пескоотделитель (225), илоотделитель (230) и центрифуга (235) выполнены с возможностью удаления дополнительных частиц повышенной зернистости из бурового раствора. В заключение,в буровой раствор добавляют добавки через смесительную воронку (240), и буровой насос (250) выкачивает буровой раствор по всасывающей линии (245) на буровую установку. В некоторых случаях одно или несколько из вышеупомянутых устройств очистки бурового раствора могут не использовать или располагать в другом порядке. Работа устройств очистки бурового раствора, описанная выше, может именоваться, индивидуально или в комбинации, как "работа периферийного бурового оборудования", т.е. относящаяся к бурению работа, прямо не связанная с вращением бурового долота. Другие виды работы периферийного бурового оборудования включают в себя, например, сопровождение бурового раствора, моделирование бурения,контроль давления, промывку ствола скважины, утилизацию отходов и т.п. Сущность изобретения В общем, в одном аспекте раскрытые варианты осуществления изобретения относятся к способу управления работой периферийного бурового оборудования. Способ содержит получение первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования,по беспроводной сети, получение второго параметра второго компонента буровых работ, связанного с работой периферийного бурового оборудования, генерирование сигнала управления для первого компонента буровых работ на основании первого параметра и второго параметра и передачу сигнала управления на первый компонент буровых работ по беспроводной сети, при этом первый компонент буровых работ регулируют на основании сигнала управления, для управления работой периферийного бурового оборудования. В общем, в одном аспекте раскрытые варианты осуществления изобретения относятся к системе управления работой периферийного бурового оборудования. Система содержит первый микроконтроллер, выполненный с возможностью получения первого параметра первого компонента буровых работ,-1 025051 связанного с работой периферийного бурового оборудования, и передачи первого параметра на модуль управления системой по беспроводной сети и модуль управления системой, выполненный с возможностью задавать сигнал управления для первого компонента буровых работ на основании первого параметра и второго параметра второго компонента буровых работ, связанных с работой периферийного бурового оборудования, и передавать сигнал управления на первый микроконтроллер по беспроводной сети,при этом первый компонент буровых работ регулируют на основании сигнала управления, для управления работой периферийного бурового оборудования. В общем, в одном аспекте раскрытые варианты осуществления изобретения относятся к способу управления работой периферийного бурового оборудования. Способ содержит получение первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования,получение второго параметра второго компонента буровых работ, связанного с работой периферийного бурового оборудования, передачу первого параметра на микроконтроллер, связанный со вторым компонентом буровых работ, по беспроводной сети и регулирование второго компонента буровых работ на основании первого параметра и второго параметра, для управления работой периферийного бурового оборудования. В общем, в одном аспекте раскрытые варианты осуществления изобретения относятся к системе управления работой периферийного бурового оборудования. Система содержит первый микроконтроллер, выполненный с возможностью получения первого параметра первого компонента буровых работ,связанного с работой периферийного бурового оборудования, и передачи первого параметра на второй микроконтроллер по беспроводной сети и второй микроконтроллер, выполненный с возможностью получения второго параметра второго компонента буровых работ, связанного с процессом бурения, и регулирования второго компонента буровых работ, на основании первого параметра и второго параметра. Другие аспекты раскрытых вариантов осуществления должны быть ясны из следующего описания и прилагаемой формулы изобретения. Краткое описание чертежей На фиг. 1 показан пример схемы системы бурения для бурения геологического пласта. На фиг. 2 показан пример схемы расположения устройств очистки бурового раствора. На фиг. 3 показана схема компонента буровых работ согласно одному или нескольким раскрытым вариантам осуществления изобретения. На фиг. 4 показана схема беспроводной сети согласно одному или нескольким раскрытым вариантам осуществления изобретения. На фиг. 5 показана схема системы согласно одному или нескольким раскрытым вариантам осуществления изобретения. На фиг. 6, 7 показаны блок-схемы последовательности операций способа согласно одному или нескольким раскрытым вариантам осуществления изобретения. На фиг. 8 показана схема системы согласно одному или нескольким раскрытым вариантам осуществления изобретения. На фиг. 9 показана схема компьютерной системы согласно одному или нескольким раскрытым вариантам осуществления изобретения. Подробное описание Конкретные варианты осуществления изобретения должны быть теперь описаны подробно со ссылкой на прилагаемые фигуры. Для ясности, одинаковым элементам на различных фигурах соответствуют одинаковые позиции ссылки. В следующем подробном описании многочисленные конкретные детали изложены для обеспечения более глубокого понимания раскрытых вариантов осуществления изобретения. Вместе с тем, рядовому специалисту в данной области техники должно быть ясно, что один или несколько вариантов осуществления изобретения можно практически применять без этих конкретных деталей. В других случаях хорошо известные признаки не описаны подробно, чтобы избежать ненужного усложнения описания. В общем, один или несколько раскрытых вариантов осуществления изобретения создают способ и систему для управления работой периферийного бурового оборудования с использованием беспроводной сети. Получают параметры компонентов буровой работы, по меньшей мере один из параметров получают по беспроводной сети. Управляющий сигнал для компонента буровой работы генерируется на основании параметров, и компонент буровой работы регулируется на основании управляющего сигнала, для управления работой периферийного бурового оборудования. На фиг. 3 показана схема компонента (300) буровой работы согласно одному или несколькими раскрытым вариантам осуществления изобретения. Например, компонент (300) буровой работы может представлять собой вибросито, дегазатор, пескоотделитель, илоотделитель, центрифугу, смесительную воронку или любой другой тип компонента, связанного с работой периферийного бурового оборудования. Компонент (300) буровой работы включает в себя один или несколько датчиков (например, датчик А (305), датчик N (310, выполненные с возможностью получения параметров, связанных компонентом(300) буровой работы. Датчик (датчики) (например, 305) могут быть выполнены с возможностью получения температуры, вязкости, измерения силы, pH, твердости горной породы или любого другого изме-2 025051 ряемого параметра компонента (300) буровой работы. Например, если компонентом (300) буровой работы является вибросито, один или несколько датчиков (например, 305, 310) могут быть выполнены с возможностью получения текущего угла деки вибросита. Другой пример, если компонентом (300) буровой работы является емкость бурового раствора, один или несколько датчиков (например, 305, 310) могут быть выполнены с возможностью получения текущего уровня текучей среды в емкости бурового раствора. Рядовым специалистам в данной области техники должно быть ясно, что в зависимости от компонента (300) буровой работы может быть выполнено несколько потенциально полезных измерений. Дополнительно, каждый из датчиков (например, 305, 310) может быть связан с одним или несколькими микроконтроллерами компонента (например, микрокроконтроллером В (315) компонента, микрокроконтроллером М (320) компонента). Микроконтроллеры (например, 315, 320) компонента могут включать в себя компоненты агрегатного обеспечения, модули программного обеспечения или любые их комбинации. Например, микроконтроллер (например, 315, 320) компонента может являться встроенным устройством, функционально соединенным с компонентом (300) буровой работы. Дополнительно, многочисленные типы микроконтроллеров (например, 315, 320) компонента можно использовать одновременно в компоненте (300) буровой работы. В некоторых случаях разнообразные датчики (например, 305,310) могут связывать с одним микроконтроллером (например, 315, 320) компонента. Один или несколько микроконтроллеров (например, 315, 320) компонента могут быть выполнены с возможностью получения параметра компонента (300) буровой работы от связанного с ним датчика (например, 305, 310). Дополнительно, один или несколько микроконтроллеров (например, 315, 320) компонента могут быть выполнены с возможностью передачи и/или получения параметров по беспроводной сети, как рассматривается ниже. Более того, один или несколько микроконтроллеров (например, 315,320) компонентов могут быть выполнены с возможностью регулирования компонента (300) буровой работы. Например, если компонентом (300) буровой работы является вибросито, тогда микроконтроллер(например, 315, 320) компонента может быть выполнен с возможностью регулирования угла деки вибросита. Другие элементы (не показаны) программного обеспечения и/или агрегатного обеспечения компонента (300) буровой работы можно также задействовать в регулировании. Например, микроконтроллер(например, 315, 320) компонента может быть функционально соединен с интерфейсом контроллера агрегатного обеспечения (не показано) для регулирования компонента (300) буровой работы. Как рассмотрено выше, один или несколько микроконтроллеров компонентов могут быть выполнены с возможностью передачи и/или получения параметров компонентов буровой работы по беспроводной сети. На фиг. 4 показана схема беспроводной сети (400) согласно одному или нескольким раскрытым вариантам осуществления изобретения. В частности, на фиг. 4 показана схема разнообразных микроконтроллеров (например, 405, 410, 415, 420) компонентов, выполненных с возможностью беспроводной связи, согласно одному или нескольким вариантам осуществления изобретения. Например, микроконтроллеры (например, 405, 410, 415, 420) компонентов могут быть выполнены с возможностью связи с использованием протокола 802.11, ZigBee или любого другого типа беспроводной связи. Дополнительно, беспроводная сеть (400) может представлять собой сеть ad-hoc, сетку, сотовую сеть, кольцевую сеть, любой другой тип сети или любую их комбинацию. Беспроводная сеть (400) может включать в себя любое число микроконтроллеров (например, 405,410, 415, 420), в зависимости, например, от используемых компонентов буровых работ, расположения компонентов буровых работ (например, расстояния между компонентами буровых работ), типов микроконтроллеров (например, 405, 410, 415, 420), типа используемой беспроводной связи или любого другого аналогичного фактора. Как показано на фиг. 4, один или несколько микроконтроллеров (например, 405, 410, 415, 420) компонентов могут быть выполнены с возможностью прямой связи, например, через другой микроконтроллер (например, 405, 410, 415, 420) компонента. Например, микроконтроллер (410) компонента и микроконтроллер (420) компонента выполнены с возможностью связи через микроконтроллер (415). Микроконтроллер (410) компонента и микроконтроллер (420) компонента могут не быть специально выполненными с возможностью связи друг с другом; вместо этого, микроконтроллер (410) может просто транслировать полученный параметр на другие близко расположенные микроконтроллеры компонентов(в данном примере, микроконтроллеры компонентов (405, 415. Принимающие микроконтроллеры компонентов (например, 405, 415) могут, в свою очередь, также транслировать полученный параметр. Таким способом можно транслировать полученный параметр напрямую или не напрямую, по беспроводной сети (400). В одном или нескольких раскрытых вариантах осуществления изобретения использование беспроводной сети может способствовать связи между компонентами буровых работ. Дополнительно, если беспроводная сеть является сетью типа ad-hoc, компоненты буровых работ могут быть легко добавлены и/или удалены из беспроводной сети. Более того, обеспечение не прямой передачи параметров между микроконтроллерами компонентов может увеличить радиус действия беспроводной сети и/или увеличить число параметров, имеющихся для использования. На фиг. 5 показана схема системы согласно одному или нескольким раскрытым вариантам осуществления изобретения. В частности, на фиг. 5 показана схема одной или нескольких беспроводных сетей(например, беспроводной сети С (505), беспроводной сети Р (510 связанных с модулем (500) управления системой, согласно одному или нескольким раскрытым вариантам осуществления изобретения. Модуль (500) управления системой может представлять собой программу программного обеспечения, автоматизированную компьютерную систему, интерактивный компьютерный пульт управления, электронное устройство, модуль любого другого аналогичного типа или любую их комбинацию. Например, модуль(500) управления системой может представлять собой программу программного обеспечения, для отображения управляющего интерфейса на интерактивном компьютерном пульте управления. В этом примере варианта осуществления изобретения, модуль (500) управления системой выполнен с возможностью получения параметров компонентов буровых работ из трансляции в беспроводной сети(сетях) (например, 505, 510). На основании параметров модуль (500) управления системой может генерировать сигнал управления для регулирования компонента буровых работ и передавать сигнал управления на компонент буровых работ по беспроводной сети (сетям) (например, 505, 510). Компонент буровых работ, подлежащий регулированию, может представлять собой компонент буровых работ, от которого принят параметр, или любой другой компонент буровых работ. На фиг. 6 показана блок-схема последовательности операций способа согласно одному или нескольким раскрытым вариантам осуществления изобретения. Конкретно, на фиг. 6 показана схема способа регулирования компонента буровых работ, согласно одному или нескольким раскрытым вариантам осуществления изобретения. Первоначально, микроконтроллеры, расположенные в разнообразных компонентах буровых работ, принимают параметры от датчиков, с которыми они связаны (этап 605). Микроконтроллеры передают параметры по беспроводной сети (этап 610), и модуль управления системой принимает переданные параметры (этап 615). На основе принятых параметров модуль управления системой задает управляющее воздействие для регулирования компонента буровых работ (этап 620). Например, управляющее воздействие может представлять собой регулирование угла деки вибросита на основе параметра, показывающего существующий угол деки и параметра, показывающего уровень бурового раствора в емкости. В некоторых аспектах модуль управления системой затем автоматически выбирает управляющее воздействие для компонента буровых работ в автоматическом режиме (этап 623). В одном или нескольких раскрытых вариантах осуществления изобретения может требоваться подтверждение пользователя для управляющего воздействия(этап 625). Например, модуль управления системой может отображать запрос, требующий подтверждение пользователя. Если пользователь не подтверждает управляющее воздействие, способ заканчивается. Если пользователь подтверждает управляющее воздействие, модуль управления системой генерирует сигнал управления, основанный на управляющем воздействии, и передает сигнал управления по беспроводной сети (этап 630). Альтернативно, если подтверждение пользователя не требуется, способ можно продолжать напрямую от этапа 620 к этапу 630. На этапе 635 микроконтроллер, связанный компонентом буровых работ, подлежащим регулированию, принимает сигнал управления. На основании сигнала управления микроконтроллер регулирует компонент буровых работ (этап 640). В одном или нескольких раскрытых вариантах осуществления изобретения результатом регулирования может быть улучшенная (например, менее дорогая в эксплуатации,более эффективная, менее опасная и т.д.) работа периферийного бурового оборудования. Дополнительно,если подтверждение пользователя для управляющего воздействия не требуется, число людей, необходимое для управления работой периферийного бурового оборудования можно уменьшить. При работе периферийного бурового оборудования в опасных местах (например, при глубоководных работах в бурном море), уменьшение числа необходимого персонала может обеспечить выигрыш в безопасности и даже сохранение жизней. Как рассмотрено выше, в одном или нескольких раскрытых вариантах осуществления изобретения,модуль управления системой можно использовать для генерирования сигнала управления для компонента буровых работ. Альтернативно, в одном или более раскрытых вариантах осуществления изобретения модуль управления системой может не требоваться. В частности, один или несколько микроконтроллеров могут включать в себя агрегатное обеспечение, программное обеспечение или их любую комбинацию для генерирования сигнала управления без использования модуля управления системой. На фиг. 7 показана блок-схема последовательности операций способа согласно одному или нескольким раскрытым вариантам осуществления. Конкретно, на фиг. 7 показана схема способа регулирования компонента буровых работ без использования модуля управления системой, согласно одному или нескольким раскрытым вариантам осуществления изобретения. В последующем рассмотрении "первый" и "второй" используются только с целью идентификации, например, чтобы отличать один микроконтроллер от другого микроконтроллера. Соответственно, использование данных терминов никакого порядка не устанавливает. Первоначально, первый микроконтроллер принимает первый параметр первого компонента буровых работ от первого датчика (этап 705), и второй микроконтроллер принимает второй параметр от второго компонента буровых работ от второго датчика (710). Первый микроконтроллер передает первый параметр по беспроводной сети (этап 715), и второй микроконтроллер принимает переданный первый параметр (этап 720). На основании первого и второго параметра второй микроконтроллер задает управляющее воздействие для регулирования компонента буровых работ (этап 725). Компонентом буровых работ, подлежащим регулированию, может являться первый компонент буровых работ, второй компонент буровых работ или любой другой компонент буровых работ. В некоторых аспектах управляющее воздействие может быть подтверждено в автоматическом режиме (этап 727). Вместе с тем, в одном или нескольких раскрытых вариантах осуществления изобретения подтверждение пользователя может требоваться для управляющего воздействия (этап 730). Например, второй микроконтроллер может быть связан с отображающим устройством и может использовать отображающее устройство для запроса подтверждения пользователя. Если пользователь не подтверждает управляющее воздействие, способ заканчивается. Если подтверждения пользователя не требуется, этап 730 не выполняется. Если компонентом буровых работ, подлежащим регулированию, является второй компонент буровых работ, второй микроконтроллер регулирует компонент буровых работ, с которым связан (этап 735). Альтернативно, если компонентом буровых работ, подлежащим регулированию, является первый компонент буровых работ или любой другой компонент буровых работ, второй микроконтроллер генерирует сигнал управления на основании управляющего воздействия, и передает сигнал управления по беспроводной сети, для приема микроконтроллером, связанным с компонентом буровых работ, подлежащим регулированию (этап 740). Микроконтроллер принимает сигнал управления и соответственно регулирует компонент буровых работ (этап 745). В одном или нескольких раскрытых вариантах осуществления, если не требуется интерфейса системы управления, управление периферийным оборудованием буровых работ может распределяться по многочисленным микроконтроллерам. В таких случаях, если отказывает микроконтроллер, регулирующий компонент, другой микроконтроллер может быть способен принять на себя управление периферийным оборудованием буровых работ. Соответственно, один или несколько раскрытых вариантов осуществления могут улучшить бесперебойность работы периферийного бурового оборудования. Дополнительно, перекладывание управления работой периферийного бурового оборудования на микроконтроллер может обеспечивать прозрачность исполнения сложных решений управления с минимальным вмешательством пользователя. Как рассмотрено выше, если меньшее число людей требуется для управления работой периферийного бурового оборудования, результатом может быть выигрыш по финансам и/или безопасности. На фиг. 8 показана схема системы согласно одному или нескольким раскрытым вариантам осуществления. Конкретно, на фиг. 8 показана схема примера системы, показывающей пример возможного регулирования компонента буровых работ, согласно одному или нескольким раскрытым вариантам осуществления. В данном варианте осуществления система включает в себя вибросито (800), емкость (825) бурового раствора и модуль (840) управления системой, соединенный связью с беспроводной сетью. Датчик (805) вибрации, связанный с виброситом (800), выполнен с возможностью получения параметра,показывающего частоту вибрации вибросита (800), и датчик (815) угла деки, связанный с виброситом(800), выполнен с возможностью получения параметра, показывающего угол деки вибросита (800). Дополнительно, микроконтроллер (810) вибрации и микроконтроллер (820) угла деки выполнены с возможностью получения параметра вибрации и параметра угла наклона от датчика (805) вибрации и датчика (815) угла деки, соответственно. Кроме того, датчик (830) уровня текучей среды, связанный с емкостью (825), выполнен с возможностью получения параметра, указывающего уровень текучих сред в емкости (825) бурового раствора, и микроконтроллер (835) уровня текучей среды выполнен с возможностью получения параметра уровня текучей среды от датчика (830) уровня текучей среды. Как рассмотрено выше, вибросито (800), емкость (825) бурового раствора и модуль (840) управления системой соединены связью с беспроводной сетью. Конкретно, микроконтроллер (810) вибрации,микроконтроллер (820) угла деки и микроконтроллер (835) уровня текучей среды выполнены с возможностью передачи и приема параметров по беспроводной сети. Например, как показано на фиг. 8, микроконтроллер (835) уровня текучей среды выполнен с возможностью приема параметров вибрации и угла деки, и их ретрансляции (в дополнение к параметру уровня текучей среды) по беспроводной сети. Модуль (840) управления системой выполнен с возможностью приема параметров и, на основании параметров, задавать управляющее воздействие для вибросита (800) и/или емкости (825) бурового раствора. Например, на основании частоты вибрации, угла деки и параметров текучей среды модуль (840) управления системой может передавать сигнал управления для микроконтроллера (810) вибрации для увеличения или уменьшения частоты вибрации вибросита (800), или передавать сигнал управления для микроконтроллера (820) угла деки для увеличения или уменьшения угла деки вибросита (800). Предшествующее рассмотрение фиг. 8 является только примером, и существует много других видов регулирования. Один или несколько вариантов осуществления можно реализовать практически на любом виде компьютера, вне зависимости от используемой платформы. Например, как показано на фиг. 9, компьютерная система (900) включает в себя компьютерный процессор (902), ассоциированную память (904),запоминающее устройство (906) и многочисленные другие элементы и функциональные взаимосвязи,обычные для сегодняшних компьютеров (не показано). Компьютер (900) может также включать в себя средство ввода, такое как клавиатура (908) и компьютерная мышь (910), и средство вывода, такое как монитор (912). Компьютерную систему (900) можно соединять с сетью (914) (например, локальной вычислительной сетью (ЛВС), глобальной вычислительной сетью (ГВС), такой как Интернет, или любой другой сетью аналогичного вида) через соединение сетевого интерфейса (не показано). Специалистам в данной области техники должно быть ясно, что эти средства ввода и вывода могут принимать другие формы. Дополнительно, специалистам в данной области техники должно быть ясно, что один или несколько элементов вышеупомянутой компьютерной системы (900) могут размещаться в удаленных местах,соединенными с другими элементами сетью. Дополнительно, один или несколько вариантов осуществления можно реализовать на распределенной системе с множеством ячеек, где каждый участок одного или нескольких вариантов осуществления (например, компонент буровых работ, датчик, микроконтроллер, беспроводная сеть, модуль управления системой и т.п.) могут размещаться в различных ячейках в распределенной системе. В одном или нескольких вариантах осуществления ячейка соответствует компьютерной системе. Альтернативно, ячейка может соответствовать компьютерному процессору с ассоциированной физической памятью. Ячейка альтернативно может соответствовать компьютерному процессору с совместно используемым запоминающим устройством и/или ресурсом. Дополнительно, инструкции программного обеспечения по выполнению одного или нескольких вариантов осуществления могут храниться на считываемом компьютером носителе, таком как компактный диск (CD), дискета,лента, файл или любом другом считываемом компьютером устройстве сохранения данных. Хотя выше описано ограниченное число вариантов осуществления, специалистам в данной области техники, извлекающим пользу из данного изобретения, должно быть ясно, что другие варианты осуществления могут быть его производными, не отходящими от объема изобретения, раскрытого в данном документе. Соответственно, объем изобретения должна ограничивать только прилагаемая формула изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ управления работой периферийного бурового оборудования, в котором получают первый параметр первого компонента буровых работ, связанного с работой периферийного бурового оборудования, по беспроводной сети; получают второй параметр второго компонента буровых работ, связанного с работой периферийного бурового оборудования, причем второй компонент буровых работ расположен выше или ниже по потоку от первого компонента буровых работ; генерируют сигнал управления для первого компонента буровых работ на основании первого параметра и второго параметра; передают сигнал управления на первый компонент буровых работ по беспроводной сети, при этом первый компонент буровых работ регулируют на основании сигнала управления для управления работой периферийного бурового оборудования. 2. Способ по п.1, в котором первый компонент буровых работ и второй компонент буровых работ представляют собой по меньшей мере один, выбранный из группы, состоящей из вибросита, дегазатора,пескоотделителя, илоотделителя, центрифуги или смесительной воронки. 3. Способ по п.1, в котором первый параметр первого компонента буровых работ или второй параметр второго компонента буровых работ представляет собой по меньшей мере один, выбранный из группы, состоящей из температуры, вязкости, измерения силы, pH, твердости горной породы, текущего наклона деки вибросита, текущего уровня бурового раствора. 4. Способ по п.1, в котором получают второй параметр по беспроводной сети. 5. Способ по п.1, в котором дополнительно запрашивают пользователя для подтверждения или отмены передачи сигнала управления на первый компонент буровых работ. 6. Способ по п.1, в котором работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении. 7. Способ по п.1, в котором работа периферийного бурового оборудования выбирается из группы,состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора. 8. Способ по п.1, в котором беспроводная сеть содержит сотовую ячеистую сеть. 9. Система управления работой периферийного бурового оборудования, содержащая первый микроконтроллер, выполненный с возможностью получения первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования; передачи первого параметра на модуль управления системой по беспроводной ячеистой сети; модуль управления системой, выполненный с возможностью задавать сигнал управления для первого компонента буровых работ, на основании первого параметра и второго параметра второго компонента буровых работ, связанных с работой периферийного бурового оборудования; передавать сигнал управления на первый микроконтроллер по беспроводной ячеистой сети,при этом первый микроконтроллер выполнен с возможностью регулирования первого компонента буровых работ на основании сигнала управления для управления работой периферийного бурового оборудования. 10. Система по п.9, в которой первый компонент буровых работ и второй компонент буровых работ представляют собой по меньшей мере один, выбранный из группы, состоящей из вибросита, дегазатора,пескоотделителя, илоотделителя, центрифуги или смесительной воронки. 11. Система по п.9, в которой первый параметр первого компонента буровых работ или второй параметр второго компонента буровых работ представляет собой по меньшей мере один, выбранный из группы, состоящей из температуры, вязкости, измерения силы, pH, твердости горной породы, текущего наклона деки вибросита, текущего уровня бурового раствора. 12. Система по п.9, дополнительно содержащая второй микроконтроллер, выполненный с возможностью получения второго параметра и сообщения второго параметра на модуль управления системой по беспроводной ячеистой сети. 13. Система по п.9, в которой модуль управления системой дополнительно выполнен с возможностью запроса пользователя для подтверждения или отмены передачи сигнала управления на первый компонент буровых работ. 14. Система по п.9, в которой работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении. 15. Система по п.9, в которой работа периферийного бурового оборудования выбирается из группы,состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора. 16. Способ управления работой периферийного бурового оборудования, содержащий получение первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования; получение второго параметра второго компонента буровых работ, связанного с работой периферийного бурового оборудования, причем второй компонент буровых работ расположен выше или ниже по потоку от первого компонента буровых работ; передачу первого параметра на микроконтроллер, связанный со вторым компонентом буровых работ, по беспроводной сети; регулирование второго компонента буровых работ на основании первого параметра и второго параметра для управления работой периферийного бурового оборудования. 17. Способ по п.16, дополнительно содержащий запрос пользователя для подтверждения или отмены регулирования второго компонента буровых работ. 18. Способ по п.16, в котором работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении. 19. Способ по п.16, в котором работа периферийного бурового оборудования выбирается из группы,состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора. 20. Способ по п.16, в котором беспроводная сеть содержит сотовую ячеистую сеть. 21. Система управления работой периферийного бурового оборудования, содержащая первый микроконтроллер, выполненный с возможностью получения первого параметра первого компонента буровых работ, связанного с работой периферийного бурового оборудования, и передачи первого параметра на второй микроконтроллер по беспроводной сети; второй микроконтроллер, выполненный с возможностью получения второго параметра второго компонента буровых работ, связанного с процессом бурения, и регулирования второго компонента буровых работ на основании первого параметра и второго параметра. 22. Система по п.21, в которой второй микроконтроллер дополнительно выполнен с возможностью запроса пользователя для подтверждения или отмены регулирования второго компонента буровых работ. 23. Система по п.21, в которой работа периферийного бурового оборудования связана с буровыми работами на нефтяном месторождении. 24. Система по п.21, в которой работа периферийного бурового оборудования выбирается из группы, состоящей из утилизации отходов, утилизации шлама, создания текучей среды, очистки текучей среды и обратной закачки бурового раствора. 25. Система по п.21, в которой беспроводная сеть содержит сотовую ячеистую сеть.
МПК / Метки
МПК: E21B 43/00
Метки: логические, нефтепромысла, управления, мониторинга, улучшенного, функции, распределенные, процессами, технологическими
Код ссылки
<a href="https://eas.patents.su/13-25051-raspredelennye-logicheskie-funkcii-dlya-uluchshennogo-monitoringa-i-upravleniya-tehnologicheskimi-processami-neftepromysla.html" rel="bookmark" title="База патентов Евразийского Союза">Распределенные логические функции для улучшенного мониторинга и управления технологическими процессами нефтепромысла</a>
Система управления циклическими процессами
Номер патента: 22085
Опубликовано: 30.10.2015
Авторы: Старовацкая Светлана Николаевна, Прокушенко Сергей Иванович, Венгер Константин Геннадьевич, Ивушкин Константин Анатольевич, Мышляев Леонид Павлович, Евтушенко Виктор Фёдорович
МПК: G05B 13/02
Метки: циклическими, процессами, управления, система
Формула / Реферат:
Система управления циклическими процессами, состоящая из реального объекта, включающего последовательно соединенные исполнительное устройство реального объекта, управляемый объект и датчики выходных воздействий и состояний реального объекта, блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, блока физической модели, включающего блок сравнения, последовательно соединенные устройство...
Структурированная система мониторинга и управления инженерным оборудованием объекта
Номер патента: 2992
Опубликовано: 26.12.2002
Авторы: Фабричнев Александр Васильевич, Ершов Владимир Владимирович, Гинзбург Виталий Вениаминович, Бурмистров Виктор Александрович
МПК: G05B 15/00
Метки: объекта, система, управления, структурированная, мониторинга, оборудованием, инженерным
Формула / Реферат:
1. Структурированная система мониторинга и управления инженерным оборудованием объекта, преимущественно многоэтажного здания, содержащая центральный вычислительный модуль с устройством ввода-вывода, датчики контроля, и/или измерения, и/или управления, и/или устройства управления узлами и агрегатами инженерного оборудования здания, подключенного через коммуникационные узлы к системе централизованного питания и блокам автономного управления этим...
Система мониторинга состояния колес рельсового транспортного средства и управления противоюзным устройством
Номер патента: 16570
Опубликовано: 30.05.2012
Авторы: Горюнов Павел Валерьевич, Алехин Анатолий Анатольевич
МПК: B60T 17/18, B61K 9/04
Метки: рельсового, транспортного, колес, противоюзным, устройством, система, мониторинга, средства, управления, состояния
Формула / Реферат:
1. Система мониторинга состояния колес рельсового транспортного средства и управления противоюзным устройством, размещенная на тележке транспортного средства, включающая в себяопоры с датчиками и механизмами, расположенными в непосредственном контакте с каждым из колес;тела вращения, подпружиненные и прижатые к ободу каждого из колес транспортного средства и приводимые во вращение от движения колес;датчики линейных перемещений, соединенные с...
Низкотемпературные барьеры для использования с внутрипластовыми процессами
Номер патента: 12901
Опубликовано: 26.02.2010
Авторы: Ким Донг, Винигар Харолд Дж.
МПК: E21B 36/00
Метки: барьеры, внутрипластовыми, использования, процессами, низкотемпературные
Формула / Реферат:
1. Способ формирования и поддержания низкотемпературной зоны вокруг по меньшей мере части подземной области обработки, заключающийся в том, чтос помощью системы охлаждения подают во множество замораживающих скважин (114), расположенных в грунте, теплопередающую среду,отличающийся тем, чтопо меньшей мере одна замораживающая скважина (114) содержит корпус (116) из углеродистой стали, который представляет собой трубу, сформированную из листового...
Сито и ситовая рама для улучшенного размещения, манипулирования и крепления сита в грохоте
Номер патента: 8820
Опубликовано: 31.08.2007
Автор: Риддл Расселл
МПК: B07B 1/49
Метки: грохоте, улучшенного, сито, ситовая, манипулирования, размещения, сита, рама, крепления
Формула / Реферат:
1. Опорная рама для вибрационного сита (1), содержащая первый внешний продольный опорный элемент (2), имеющий первый конец и второй конец, второй внешний продольный опорный элемент (4), имеющий первый конец и второй конец и расположенный на расстоянии от и, по существу, параллельно первому внешнему продольному опорному элементу; один или несколько внутренних продольных опорных элементов (6), каждый из которых имеет первый конец и второй конец и...
Предыдущий патент: Циклические мостиковые простые эфиры в качестве ингибиторов dgat1
Следующий патент: Конструкция из мультифиламентных нитей
Случайный патент: Тетразольные производные и способы лечения расстройств, связанных с метаболизмом