Система управления циклическими процессами
Номер патента: 22085
Опубликовано: 30.10.2015
Авторы: Мышляев Леонид Павлович, Прокушенко Сергей Иванович, Венгер Константин Геннадьевич, Евтушенко Виктор Фёдорович, Старовацкая Светлана Николаевна, Ивушкин Константин Анатольевич

Формула / Реферат
Система управления циклическими процессами, состоящая из реального объекта, включающего последовательно соединенные исполнительное устройство реального объекта, управляемый объект и датчики выходных воздействий и состояний реального объекта, блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, блока физической модели, включающего блок сравнения, последовательно соединенные устройство ввода начальных условий, исполнительное устройство физической модели, физическую модель, датчики выходных воздействий и состояний физической модели, блок вычисления функционала и блок численного дифференцирования, последовательно соединенные блок пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий и блок пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта, выход которого соединен с входом исполнительного устройства реального объекта, выход блока численного дифференцирования подключен к блоку пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий и к второму входу исполнительного устройства физической модели, выход блока сравнения соединен с входом устройства ввода начальных условий и с вторым входом блока численного дифференцирования, первый выход датчиков выходных воздействий и состояний реального объекта подключен к входу блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к второму выходу датчиков выходных воздействий и состояний физической модели, отличающаяся тем, что дополнительно содержит последовательно соединенные датчики управляющих воздействий реального объекта, блок расчета приведенных к выходу реального объекта возмущений, блок пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели, блок коррекции приведенных возмущений физической модели и блок экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления, датчики контролируемых возмущений реального объекта, блок расчета приведенных возмущений физической модели, датчики контролируемых возмущений физической модели, датчики управляющих воздействий физической модели, вход которых соединен с первым входом физической модели, а выход - с первым входом блока расчета приведенных возмущений физической модели, второй вход которого подключен к выходу датчиков контролируемых возмущений физической модели, вход которых является первым входом системы управления и соединен с вторым входом блока вычисления функционала и с вторым входом физической модели, первый выход датчиков выходных воздействий и состояний физической модели подключен к третьему входу блока расчета приведенных возмущений физической модели, второй выход датчиков выходных воздействий и состояний реального объекта соединен с вторым входом блока расчета приведенных к выходу реального объекта возмущений, третий вход которого соединен с выходом датчиков контролируемых возмущений реального объекта, вход которых является вторым входом системы управления и подключен к второму входу управляемого объекта, первый вход которого соединен с входом датчиков управляющих воздействий реального объекта, второй вход блока коррекции приведенных возмущений физической модели подключен к выходу блока расчета приведенных возмущений физической модели, выход блока экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления соединен с третьим входом блока вычисления функционала.

Текст
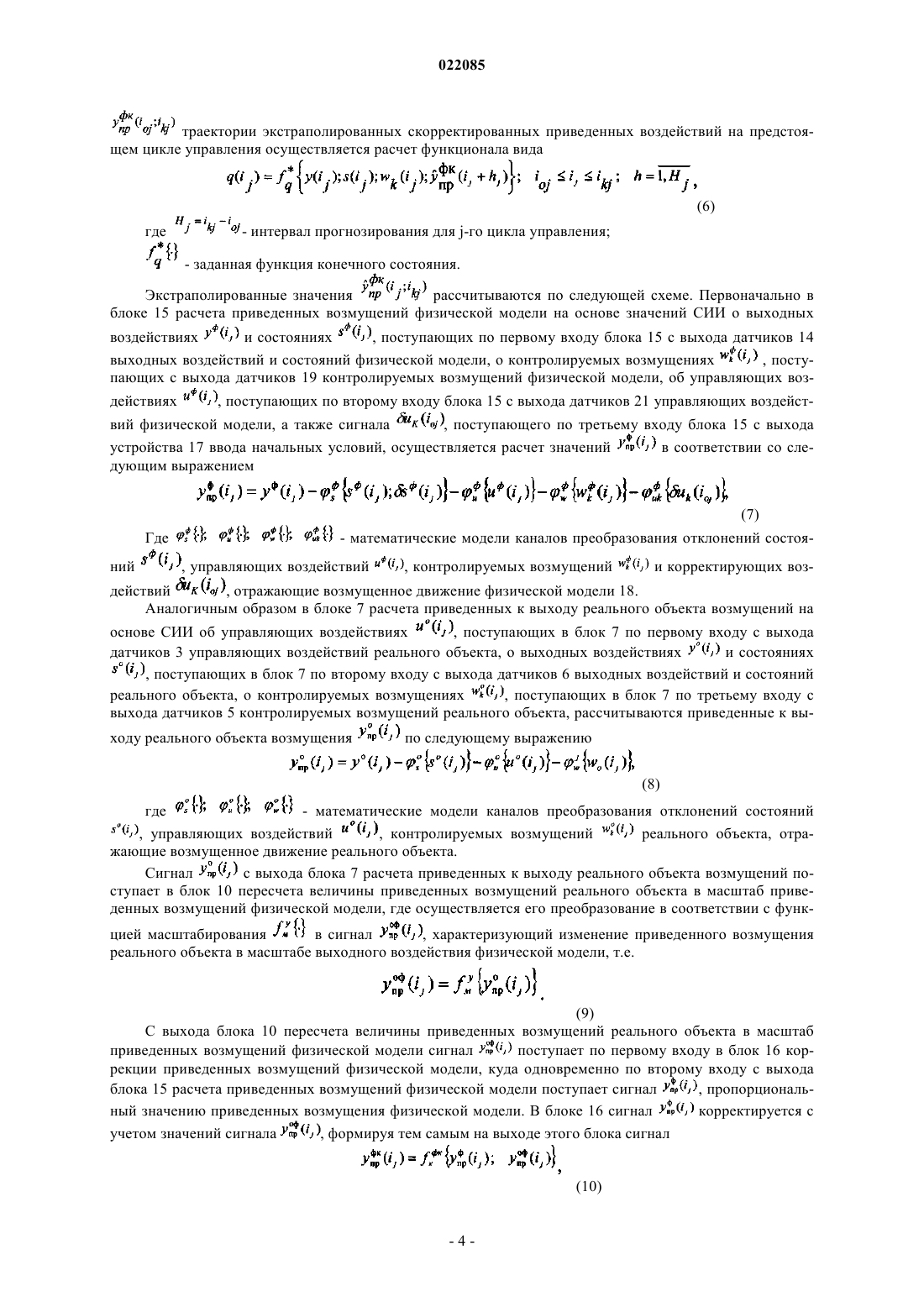
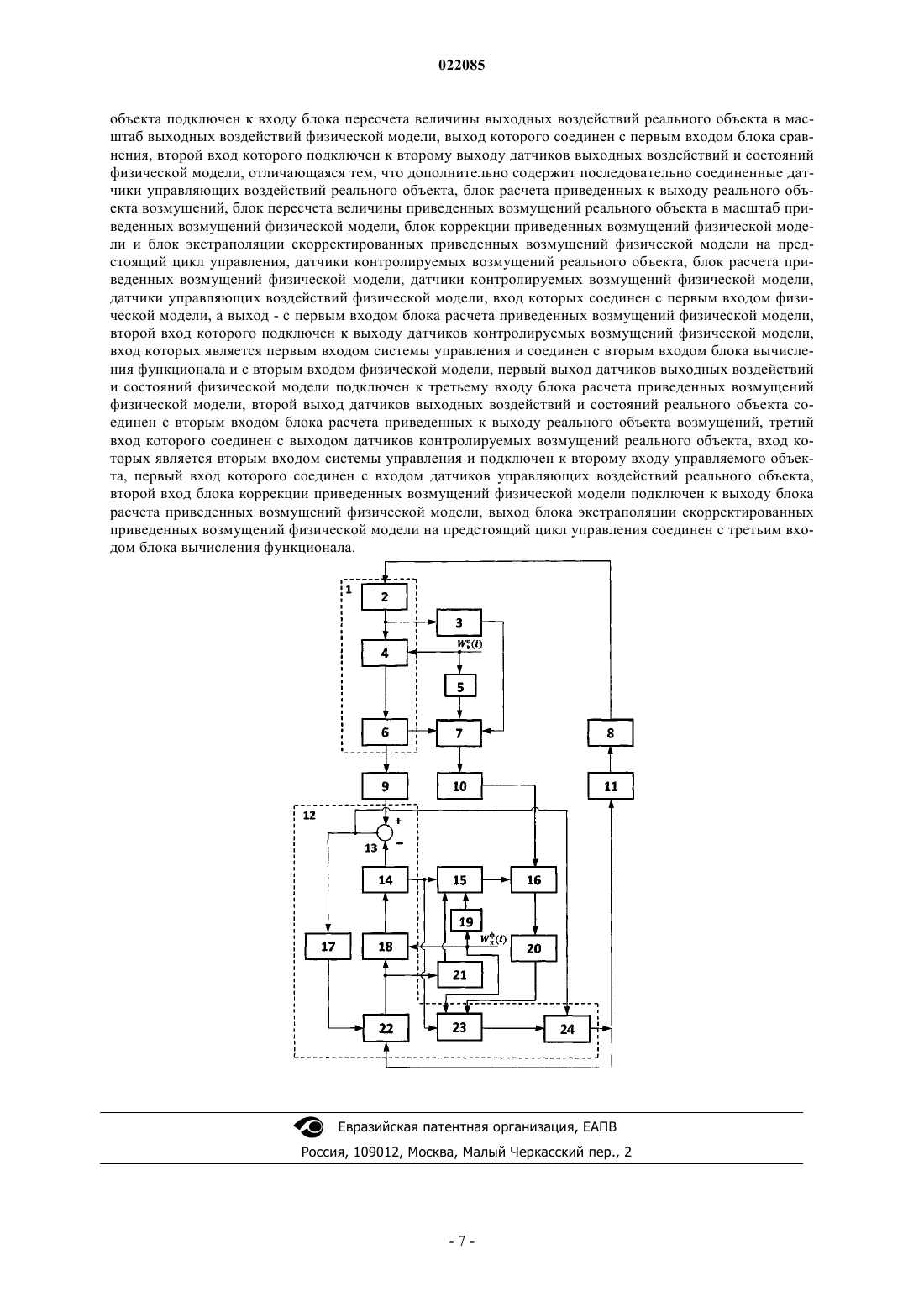
СИСТЕМА УПРАВЛЕНИЯ ЦИКЛИЧЕСКИМИ ПРОЦЕССАМИ Изобретение относится к области автоматического управления циклическими процессами сложных объектов,функционирующих в условиях неопределенности. Технический результат - повышение точности системы управления. Для этого в систему управления введены последовательно соединенные датчики 3 управляющих воздействий реального объекта, блок 7 расчета приведенных к выходу реального объекта возмущений, блок 10 пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели, блок 16 коррекции приведенных возмущений физической модели и блок 20 экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления, датчики 5 контролируемых возмущений реального объекта, блок 15 расчета приведенных возмущений физической модели, датчики 19 контролируемых возмущений физической модели, датчики 21 управляющих воздействий физической модели, вход которых соединен с первым входом физической модели 18, а выход - с первым входом блока 15 расчета приведенных возмущений физической модели, второй вход которого подключен к выходу датчиков 19 контролируемых возмущений физической модели, вход которых является первым входом системы управления и соединен с вторым входом блока 23 вычисления функционала и с вторым входом физической модели 18, первый выход датчиков 14 выходных воздействий и состояний физической модели подключен к третьему входу блока 15 расчета приведенных возмущений физической модели, второй выход датчиков 6 выходных воздействий и состояний реального объекта соединен с вторым входом блока 7 расчета приведенных к выходу реального объекта возмущений, третий вход которого соединен с выходом датчиков 5 контролируемых возмущений реального объекта, вход которых является вторым входом системы управления и подключен к второму входу управляемого объекта 4, первый вход которого соединен с входом датчиков 5 управляющих воздействий реального объекта, второй вход блока 16 коррекции приведенных возмущений физической модели подключен к выходу блока 15 расчета приведенных возмущений физической модели, выход блока 20 экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления соединен с третьим входом блока 23 вычисления функционала.(71)(73) Заявитель и патентовладелец: ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ "СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ИНДУСТРИАЛЬНЫЙ УНИВЕРСИТЕТ"- ФГБОУВПО Изобретение относится к области автоматического управления циклическими процессами сложных объектов, функционирующих в условиях неопределенности, обусловленной наличием постоянно действующих неконтролируемых возмущений, а также отсутствием полных математических моделей этих процессов. Примерами таких объектов могут служить процессы термоциклической обработки металлов в нагревательных установках, процессы сжигания водно-шламового топлива в топках специальных конструкций. Для управления циклическими процессами известна система управления [1], состоящая из реального объекта, включающего последовательно соединенные исполнительные устройства, управляемый объект и датчики, блок физической модели, включающий блок сравнения, последовательно соединенные устройства ввода начальных условий, физическую модель, датчики физической модели, блок вычисления функционала, блок численного дифференцирования и исполнительные устройства физической модели, выход датчиков реального объекта соединен с первым входом блока сравнения, второй вход которого соединен с выходом датчиков физической модели, выход блока сравнения подключен к входу устройства ввода начальных условий и второму входу блока численного дифференцирования, выход которого соединен с входом исполнительного устройства реального объекта. При работе системы управления с использованием физической модели вырабатываются в ускоренном времени оптимальные управляющие воздействия, которые переносятся на реальный объект. Недостатком известной системы является низкая точность управления, так как управляющие воздействия, полученные на физической модели, имеют другие значения величин и/или масштабы времени,либо даже другую физическую природу, чем реального объекта. Наиболее близкой по физической сущности к предлагаемой системе является система управления циклическими процессами [2], содержащая реальный объект, включающий последовательно соединенные исполнительное устройство, управляемый объект и датчики, блок физической модели, включающий блок сравнения, устройство ввода начальных условий, последовательно соединенные исполнительное устройство физической модели, физическую модель, датчики физической модели, блок вычисления функционала, блок численного дифференцирования, блок пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий, блок пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта, блок пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, выход блока численного дифференцирования соединен с первым входом исполнительного устройства физической модели, первый вход блока сравнения соединен с выходом датчиков физической модели, выход блока сравнения подключен к входу устройства ввода начальных условий и к второму входу блока численного дифференцирования, выход которого подключен через блок пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта и блок пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий к входу исполнительного устройства реального объекта, вход блока пересчета величины рабочих управляющих воздействий в модельные управляющие воздействия соединен с выходом датчиков реального объекта, а выход - с вторым входом блока сравнения, выход устройства ввода начальных условий соединен с вторым входом исполнительного устройства физической модели. При работе системы управления циклическими процессами на будущий цикл управления с помощью физической модели вырабатываются в ускоренном времени оптимальные в смысле заданного функционала значения модельных управляющих воздействий, которые с помощью масштабных преобразований пересчитываются в величину рабочих управляющих воздействий реального объекта. Значения выходного воздействия реального объекта управления в течение цикла пересчитываются в масштаб изменения выходного воздействия физической модели. Перед началом каждого цикла управления модельные траектории выходного воздействия сравниваются с скорректированными траекториями выходного воздействия реальногообъекта с целью установления их требуемого соответствия. Недостаток известной системы состоит в низкой точности управления, так как при выработке управляющих воздействий не учитывается наличие постоянно действующих контролируемых и неконтролируемых возмущений, оказывающих существенное влияние на состояния и выходные воздействия объекта управления. Задача изобретения - повышение точности системы управления циклическими процессами. Поставленная задача достигается тем, что в систему управления, состоящую из реального объекта,включающего последовательно соединенные исполнительное устройство реального объекта, управляемый объект и датчики выходных воздействий и состояний реального объекта, блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, блока физической модели, включающего блок сравнения, последовательно соединенные устройство ввода начальных условий, исполнительное устройство физической модели, физическую модель, датчики выходных воздействий и состояний физической модели, блок вычисления функционала и блок численного дифференцирования, последовательно соединенные блок пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий и блок пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта, выход ко-1 022085 торого соединен с входом исполнительного устройства реального объекта, выход блока численного дифференцирования подключен к блоку пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий и к второму входу исполнительного устройства физической модели, выход блока сравнения соединен с входом устройства ввода начальных условий и с вторым входом блока численного дифференцирования, первый выход датчиков выходных воздействий и состояний реального объекта подключен к входу блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к второму выходу датчиков выходных воздействий и состояний физической модели, введены последовательно соединенные датчики управляющих воздействий реального объекта, блок расчета приведенных к выходу реального объекта возмущений, блок пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели, блок коррекции приведенных возмущений физической модели и блок экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления, датчики контролируемых возмущений реального объекта, блок расчета приведенных возмущений физической модели, датчики контролируемых возмущений физической модели, датчики управляющих воздействий физической модели, вход которых соединен с первым входом физической модели, а выход с первым входом блока расчета приведенных возмущений физической модели, второй вход которого подключен к выходу датчиков контролируемых возмущений физической модели, вход которых является первым входом системы управления и соединен с вторым входом блока вычисления функционала и с вторым входом физической модели, первый выход датчиков выходных воздействий и состояний физической модели подключен к третьему входу блока расчета приведенных возмущений физической модели,второй выход датчиков выходных воздействий и состояний реального объекта соединен с вторым входом блока расчета приведенных к выходу реального объекта возмущений, третий вход которого соединен с выходом датчиков контролируемых возмущений реального объекта, вход которых является вторым входом системы управления и подключен к второму входу управляемого объекта, первый вход которого соединен с входом датчиков управляющих воздействий реального объекта, второй вход блока коррекции приведенных возмущений физической модели подключен к выходу блока расчета приведенных возмущений физической модели, выход блока экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления соединен с третьим входом блока вычисления функционала. На чертеже представлена система управления циклическими процессами. На чертеже приведены следующие обозначения:- контролируемые возмущения реального объекта;- контролируемые возмущения физической модели. Система управления циклическими объектами содержит реальный объект 1, исполнительное устройство 2 реального объекта, датчики 3 управляющих воздействий реального объекта, управляемый объект 4, датчики 5 контролируемых возмущений реального объекта, датчики 6 выходных воздействий и состояний реального объекта, блок 7 расчета приведенных к выходу реального объекта возмущений,блок 8 пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта, блок 9 пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, блок 10 пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели, блок 11 пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий, блок 12 физической модели, блок 13 сравнения, датчики 14 выходных воздействий и состояний физической модели, блок 15 расчета приведенных возмущений физической модели, блок 16 коррекции приведенных возмущений физической модели, устройство 17 ввода начальных условий, физическая модель 18, датчики 19 контролируемых возмущений физической модели, блок 20 экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления, датчики 21 управляющих воздействий физической модели, исполнительное устройство 22 физической модели, блок 23 вычисления функционала, блок 24 численного дифференцирования. Система управления циклическими объектами состоит из реального объекта управления 1 циклического действия и физической модели 18 объекта управления, воспроизводящей в ускоренном масштабе времени технологический процесс, подобный процессу реального объекта, и совокупности реализованных на компьютере математических блоков (процедур) с целью установления соответствия между воздействиями и состояниями реального объекта и его физической модели. При этом процесс управления разбит на интервалы времени t (циклы управления), длительность которых ограничивается сверху допустимой дискретностью управления, а снизу - допустимым коэффициентом ускорения времени для физической модели с учетом длительности интервала оптимизации. Система управления циклическими процессами работает следующим образом. В течение каждого jго (, где J - число циклов управления, на которые разбита длительность циклического процесса),цикла управления на интервале времени, где подстрочные индексы "0" и "k" означают начало и конец цикла управления, значения входных, выходных воздействий и состояний как реального объекта управления, так и его физической модели контролируется системой соответствующих датчиков. В частности, на выходе датчиков 3 управляющих воздействий формируется сигнал измерительной информации, пропорциональный значениям управляющих воздействий реального объекта, а на выходе датчиков 21 - СИИ, пропорциональный значениям управляющих воздействий физической модели. На выходе датчиков 5 контролируемых возмущений формируется СИИ, пропорциональный значениям контролируемых возмущений реального объекта, а на выходе датчиков 19 , пропорциональный значениям контролируемых возмущений физической модели. На выходе датчиков 6 выходных воздействий и состояний формируется СИИ, пропорциональный значениям выходных воздействий реального объекта, а на выходе датчиков 14 - сигнал, пропорциональный значениям выходных воздействий и состояний физической модели. с выхода датчиков 6 выходных воздействий и состояний реального объекта поступает в Сигнал блок 9 пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, где осуществляется преобразование сигнала в соответствии с функцией масв сигнал штабирования(1) который изменяется в одном и том же диапазоне значений, что и сигнал о входных воздействиях и физической модели, формируемый на выходе датчиков 14 выходных воздействий и состояниях состояний физической модели. В начале каждого цикла управления ния, где он сравнивается с сигналом рассогласовании этих сигналов, т.е. при этот сигнал поступает по первому входу в блок 13 сравне, поступающим в блок 13 сравнения по второму входу. При(2) Сигнал поступает в устройство 17 ввода начальных условий, где в соответствии с заложенным вырабатываются в начале каждого цикла в него алгоритмом корректировки начальных условий управления специальные корректирующие воздействия(3) Сигнал с выхода устройства 17 ввода начальных условий поступает по первому входу на исполнительное устройство 22 физической модели, которое непосредственно воздействуя на физическую модель 18, будет изменять значения выходных воздействий физической модели на величину- математическая модель канала преобразования корректирующих воздействий,доводя физическую модель 18 до эквивалентного (с точностью до погрешностей контроля и исполнения управляющих команд) состояния реального объекта. В частности, корректировка состояния физической модели на начало j-го цикла управления может осуществляться также и путем изменения длительности цикла управления, например, в соответствии с алгоритмом- корректировка длительности j-го цикла управления физической модели; и - пересчетные коэффициенты, выбираемые эмпирически. После корректировки начальных условий и приведения физической модели в состояние, эквивалентное (с учетом масштабных преобразований) состоянию реального объекта, физическая модель функционирует в ускоренном по отношению к реальному объекту масштабе времени на j-ом цикле управления. При этом в блоке 23 вычисления функционала с использованием сигналов выхода датчиков 14 выходных воздействий и состояний физической модели 18, сигналов с выхода датчиков 19 контролируемых возмущений физической модели, а также с использованием значений траектории экстраполированных скорректированных приведенных воздействий на предстоящем цикле управления осуществляется расчет функционала вида- интервал прогнозирования для j-го цикла управления;- заданная функция конечного состояния. рассчитываются по следующей схеме. Первоначально в Экстраполированные значения блоке 15 расчета приведенных возмущений физической модели на основе значений СИИ о выходных воздействиях и состояниях, поступающих по первому входу блока 15 с выхода датчиков 14 выходных воздействий и состояний физической модели, о контролируемых возмущениях, поступающих с выхода датчиков 19 контролируемых возмущений физической модели, об управляющих воздействиях, поступающих по второму входу блока 15 с выхода датчиков 21 управляющих воздействий физической модели, а также сигнала, поступающего по третьему входу блока 15 с выхода устройства 17 ввода начальных условий, осуществляется расчет значений дующим выражением- математические модели каналов преобразования отклонений состоя, управляющих воздействий, отражающие возмущенное движение физической модели 18. Аналогичным образом в блоке 7 расчета приведенных к выходу реального объекта возмущений на основе СИИ об управляющих воздействиях, поступающих в блок 7 по первому входу с выхода датчиков 3 управляющих воздействий реального объекта, о выходных воздействиях и состояниях, поступающих в блок 7 по второму входу с выхода датчиков 6 выходных воздействий и состояний реального объекта, о контролируемых возмущениях, поступающих в блок 7 по третьему входу с выхода датчиков 5 контролируемых возмущений реального объекта, рассчитываются приведенные к выходу реального объекта возмущения- математические модели каналов преобразования отклонений состояний, контролируемых возмущений реального объекта, отражающие возмущенное движение реального объекта. Сигнал с выхода блока 7 расчета приведенных к выходу реального объекта возмущений поступает в блок 10 пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели, где осуществляется его преобразование в соответствии с функцией масштабирования в сигнал, характеризующий изменение приведенного возмущения реального объекта в масштабе выходного воздействия физической модели, т.е.(9) С выхода блока 10 пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели сигнал поступает по первому входу в блок 16 коррекции приведенных возмущений физической модели, куда одновременно по второму входу с выхода блока 15 расчета приведенных возмущений физической модели поступает сигнал, пропорциональный значению приведенных возмущения физической модели. В блоке 16 сигнал корректируется с учетом значений сигнала, формируя тем самым на выходе этого блока сигнал- корректирующий оператор, который отражает характер изменения приведенного к выгде ходу реального объекта возмущений в масштабе изменения выходных воздействий физической модели, в том числе и с учетом изменений начальных условий j-го цикла управления. С выхода блока 16 коррекции приведенных возмущений физической модели сигнал поступает в блок 20 экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления, где осуществляется оценивание будущих значений скорректированных приведенных возмущений физической модели виде траектории от текущего момента приведенных возмущений на будущем интервале Экстраполяция траектории может быть, в частности, осуществлена с помощью алгоритма релейно-экспоненциального сглаживания первого порядка [3]- значения коэффициента сглаживания и величины ограничения. С выхода блока 20 экстраполяции скорректированных приведенных возмущений физической модели сигнал поступает по третьему входу в блок 23 вычисления функционала, где с использо, осуществляется расванием текущих значений сигналов чет функционала (6). Сигнал с выхода блока 23, пропорциональный значению функционала 6, поступает в блок 24 численного дифференцирования, где происходит численное дифференцирование этого функционала при вариации начальных условий и функционировании физической модели в ускоренном масштабе времени, что позволяет определить управляющее воздействие на предстоящий цикл управления, например, по выражению [2]- статический оператор, выраженный через коэффициенты, определяемые эмпирически. Сигнал с выхода блока 24 численного дифференцирования поступает на вход исполнительного устройства 22 физической модели, осуществляя реализацию ее требуемого технологического режима. Одновременно с этим сигнал подается в блок 11 пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий реального объекта, где преобразуется в соответствии с выражением- функция масштабирования управляющих воздействий физической модели, которая в ча, выбираемого стном случае может быть представлена с помощью коэффициента масштабирования опытным путем. Сигнал с выхода блока 11 пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий поступает в блок 8 пересчета траекторий управляющих воздействий, где он запоминается в порядке возрастания , формируя траекторию управляющих воздействий здесь траектории пересчитываются в масштаб времени функционирования реального объекта, в частности, путем изменения шага дискретизациив соответствии с выражением(14) где - масштабный коэффициент дискретного времени; подстрочные индексы "р" и "м" означают реальный и модельный соответственно. Выходной сигнал блока 8 поступает на вход исполнительного устройства 2 реального объекта, которое реализует эту траекторию управляющего воздействия, обеспечивая оптимальный в смысле функционала (6) режим технологического процесса реального объекта на интервале времени На следующем (j+1)-ом цикле управления работа системы управления циклическим процессом осуществляется аналогичным образом, вплоть до конца циклического процесса, обеспечивая тем самым оптимальную работу системы управления от начала до конца цикла технологического процесса. Введение новых блоков и связей позволяет повысить точность системы управления циклическим процессом за счет учета неопределенности, обусловленной наличием постоянно действующих неконтролируемых возмущений, при выработке оптимальных управляющих воздействий на каждом цикле управления. Перечень позиций на чертеже 1 - реальный объект,2 - исполнительное устройство реального объекта,3 - датчики управляющих воздействий реального объекта,4 - управляемый объект,5 - датчики контролируемых возмущений реального объекта,6 - датчики выходных воздействий и состояний реального объекта,7 - блок расчета приведенных к выходу реального объекта возмущений,8 - блок пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта,9 - блок пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели,10 - блок пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели,11 - блок пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий,12 - блок физической модели,13 - блок сравнения,14 - датчики выходных воздействий и состояний физической модели,15 - блок расчета приведенных возмущений физической модели,16 - блок коррекции приведенных возмущений физической модели,17 - устройство ввода начальных условий,18 -физическая модель,19 - датчики контролируемых возмущений физической модели,20 - блок экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления,21 - датчики управляющих воздействий физической модели,22 - исполнительное устройство физической модели,23 - блок вычисления функционала,24 - блок численного дифференцирования. Источники информации 1. Красовский А.А. Оптимальное управление посредством физической прогнозирующей модели/А.А. Красовский/Автоматика и телемеханика. 1979,2, с. 156-162. 2. Патент РФ на полезную модель 114794, заявл. 20.10.2011 г., МПК 8 G05B 13/04. 3. Теория и практика прогнозирования в системах управления / С.В. Емельянов, С.К. Коровин, Л.П. Мышляев и др. - Кемерово; М.:Издат. Объединение "Российские университеты": Кузбассвузиздат АСТШ, 2008, с. 129-130. ФОРМУЛА ИЗОБРЕТЕНИЯ Система управления циклическими процессами, состоящая из реального объекта, включающего последовательно соединенные исполнительное устройство реального объекта, управляемый объект и датчики выходных воздействий и состояний реального объекта, блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, блока физической модели, включающего блок сравнения, последовательно соединенные устройство ввода начальных условий, исполнительное устройство физической модели, физическую модель, датчики выходных воздействий и состояний физической модели, блок вычисления функционала и блок численного дифференцирования, последовательно соединенные блок пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий и блок пересчета траекторий управляющих воздействий физической модели в траектории управляющих воздействий реального объекта, выход которого соединен с входом исполнительного устройства реального объекта, выход блока численного дифференцирования подключен к блоку пересчета величины модельных управляющих воздействий в величину рабочих управляющих воздействий и к второму входу исполнительного устройства физической модели, выход блока сравнения соединен с входом устройства ввода начальных условий и с вторым входом блока численного дифференцирования, первый выход датчиков выходных воздействий и состояний реального объекта подключен к входу блока пересчета величины выходных воздействий реального объекта в масштаб выходных воздействий физической модели, выход которого соединен с первым входом блока сравнения, второй вход которого подключен к второму выходу датчиков выходных воздействий и состояний физической модели, отличающаяся тем, что дополнительно содержит последовательно соединенные датчики управляющих воздействий реального объекта, блок расчета приведенных к выходу реального объекта возмущений, блок пересчета величины приведенных возмущений реального объекта в масштаб приведенных возмущений физической модели, блок коррекции приведенных возмущений физической модели и блок экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления, датчики контролируемых возмущений реального объекта, блок расчета приведенных возмущений физической модели, датчики контролируемых возмущений физической модели,датчики управляющих воздействий физической модели, вход которых соединен с первым входом физической модели, а выход - с первым входом блока расчета приведенных возмущений физической модели,второй вход которого подключен к выходу датчиков контролируемых возмущений физической модели,вход которых является первым входом системы управления и соединен с вторым входом блока вычисления функционала и с вторым входом физической модели, первый выход датчиков выходных воздействий и состояний физической модели подключен к третьему входу блока расчета приведенных возмущений физической модели, второй выход датчиков выходных воздействий и состояний реального объекта соединен с вторым входом блока расчета приведенных к выходу реального объекта возмущений, третий вход которого соединен с выходом датчиков контролируемых возмущений реального объекта, вход которых является вторым входом системы управления и подключен к второму входу управляемого объекта, первый вход которого соединен с входом датчиков управляющих воздействий реального объекта,второй вход блока коррекции приведенных возмущений физической модели подключен к выходу блока расчета приведенных возмущений физической модели, выход блока экстраполяции скорректированных приведенных возмущений физической модели на предстоящий цикл управления соединен с третьим входом блока вычисления функционала.
МПК / Метки
МПК: G05B 13/02
Метки: управления, процессами, система, циклическими
Код ссылки
<a href="https://eas.patents.su/8-22085-sistema-upravleniya-ciklicheskimi-processami.html" rel="bookmark" title="База патентов Евразийского Союза">Система управления циклическими процессами</a>
Способ управления системой рудничных конвейеров и система управления
Номер патента: 15305
Опубликовано: 30.06.2011
Автор: Белоглазов Николай Евгеньевич
МПК: B65G 43/08
Метки: система, рудничных, системой, управления, способ, конвейеров
Формула / Реферат:
1. Способ управления рудничной конвейерной линией, состоящей из магистральных конвейеров и конвейеров ответвлений, обеспечивающих периодическую и продолжительную подачу груза на магистральные конвейеры, содержащий операции сбора данных, передачи и отображения информации и управления приводами конвейеров, отличающийся тем, что дополнительно получают информацию о местонахождении, состоянии и скорости перемещения механизмов периодической и...
Система регулирования объекта с рециклом
Номер патента: 21192
Опубликовано: 30.04.2015
Авторы: Ивушкин Анатолий Алексеевич, Мышляев Леонид Павлович, Чичиндаев Михаил Георгиевич, Березин Дмитрий Георгиевич, Циряпкина Анастасия Владимировна, Венгер Константин Геннадьевич, Киселёв Станислав Филиппович, Барагичев Константин Евгеньевич
МПК: G05B 13/00
Метки: система, объекта, регулирования, рециклом
Формула / Реферат:
Система регулирования количества материала для объектов с рециклом, содержащая задатчик, экстраполятор, первый блок запаздывания, последовательно соединенные первый датчик, первый сумматор, первый блок вычитания, регулирующий блок, второй блок вычитания и модель прямого канала без запаздывания, последовательно включенные модель рецикла без запаздывания, второй блок запаздывания и третий блок вычитания, последовательно соединенные исполнительный...
Система управления двигателем и бесступенчатой трансмиссией
Номер патента: 7321
Опубликовано: 25.08.2006
Авторы: Пабат Александр Анатольевич, Пабат Анастасия Анатольевна
МПК: B60W 10/04, B60W 10/24
Метки: система, управления, трансмиссией, бесступенчатой, двигателем
Формула / Реферат:
Система управления двигателем и бесступенчатой трансмиссией, содержащая датчики параметров, характеризующих работу двигателя и трансмиссии, блок программного управления, вход которого соединен с выходами датчиков, исполнительные механизмы, соединенные с блоком управления, органы управления движением транспортного средства и орган управления скоростным режимом двигателя, отличающаяся тем, что соединенная с двигателем посредством управляемой муфты...
Оптоэлектронная система управления и способ управления
Номер патента: 3571
Опубликовано: 26.06.2003
Авторы: Макиннес Джеймс, Леггет Найджел Дерек
МПК: H03K 17/78, G08C 23/06
Метки: способ, оптоэлектронная, управления, система
Формула / Реферат:
1. Система управления, предназначенная для приведения в действие множества электротехнических устройств и имеющая импульсный источник света, выдающий световые импульсы с варьируемой частотой, которые поступают во множество управляющих шлюзов, каждый из которых при его освещении световыми импульсами с запускающей частотой, при которой происходит срабатывание соответствующего устройства, обеспечивает подачу на такое устройство рабочего напряжения,...
Блок, система и способ управления климатическим оборудованием
Номер патента: 16771
Опубликовано: 30.07.2012
Автор: Иванов Сергей Диодорович
МПК: G05B 19/00
Метки: система, оборудованием, управления, блок, способ, климатическим
Формула / Реферат:
1. Блок управления климатическим оборудованием, включающий модуль питания и логическую схему, выполненную на базе микропроцессора, с входами/выходами для подключения по меньшей мере двух блоков климатического оборудования, отличающийся тем, что дополнительно в него введены модуль памяти аварийных ситуаций, выполненный на базе микропроцессора, модуль резервного электропитания, модуль интерфейса для связи с компьютером и по меньшей мере два модуля...
Предыдущий патент: Спирооксетановые производные урацилсодержащих нуклеозидов
Следующий патент: Полимерное устройство для защиты соединительной трубной муфты
Случайный патент: Полиморфная, кристаллическая и мезофазная формы 2-(5-бром-4-(4-циклопропилнафталинил-1-ил)-4н-1,2,4-триазол-3-илтио)ацетата натрия и их применение