Контроль стохастического шума бурового долота
Формула / Реферат
1. Способ отклонения ошибочного движения бурового долота низа буровой колонны при бурении скважины в пласте в заданном направлении, согласно которому
определяют направление бурения относительно пласта;
сравнивают направление с заданным направлением;
при этом используют отклоняющий механизм, который выполнен с возможностью выделения радиального ошибочного движения оборудования низа буровой колонны в заданном направлении; и
ориентируют отклоняющий механизм, если при сравнении определяют, что направление не совпадает с заданным направлением, причем в качестве отклоняющего механизма используют измерительный башмак, ассиметрично соединенный с оборудованием низа буровой колонны и удерживаемый в фиксированном направлении.
2. Способ по п.1, согласно которому, чтобы заставить долото направленно бурить в заданном направлении относительно грунта, буровое долото изготавливают с возможностью приложения вращательного бокового усилия вдоль некоторого фиксированного направления относительно бурового долота, и отклоняющий механизм выполняют с возможностью отклонения вращательного бокового усилия, в результате чего буровое долото стремится повернуться к заданному направлению.
3. Способ по п.1, согласно которому, чтобы заставить долото направленно бурить в заданном направлении относительно грунта, дополнительно используют устройство управления направлением движения, под действием которого изменяют направление бурового долота, при этом устройство управления направлением движения представляет собой механизм позиционирования долота.
4. Способ по п.1, согласно которому, чтобы заставить долото направленно бурить в заданном направлении относительно грунта, дополнительно сообщают заданное направление с наземных сооружений.
5. Направляющая система для бурового долота для отклонения ошибочного движения бурового долота, чтобы заставить долото направленно бурить в заданном направлении относительно пласта, причем направляющая система для бурового долота содержит
низ буровой колонны с буровым долотом;
отклоняющий механизм для выделения компонентов радиального ошибочного движения бурового долота в заданном направлении относительно пласта, причем в качестве отклоняющего механизма используется подвижный измерительный башмак, ассиметрично соединенный с оборудованием низа буровой колонны и удерживаемый в фиксированном направлении;
датчик направления для определения направления скважины с буровым долотом,
контроллер для сравнения заданного направления с указанным направлением, обеспечивающий возможность ориентирования отклоняющего механизма для выделения составляющих ошибочного движения в определяемом направлении, если контроллер определяет, что направление не совпадает с заданным направлением.
6. Направляющая система по п.5, в которой буровое долото изготовлено с возможностью приложения вращательного бокового усилия вдоль некоторого фиксированного направления относительно бурового долота и отклоняющий механизм выполнен с возможностью отклонения вращательного бокового усилия, в результате чего буровое долото стремится повернуться к заданному направлению.
7. Направляющая система по п.5, в которой контроллер расположен в скважине.
8. Направляющая система по п.5, которая выполнена с возможностью установки заданного направления на поверхности и сообщения его на оборудование низа буровой колонны.

Текст
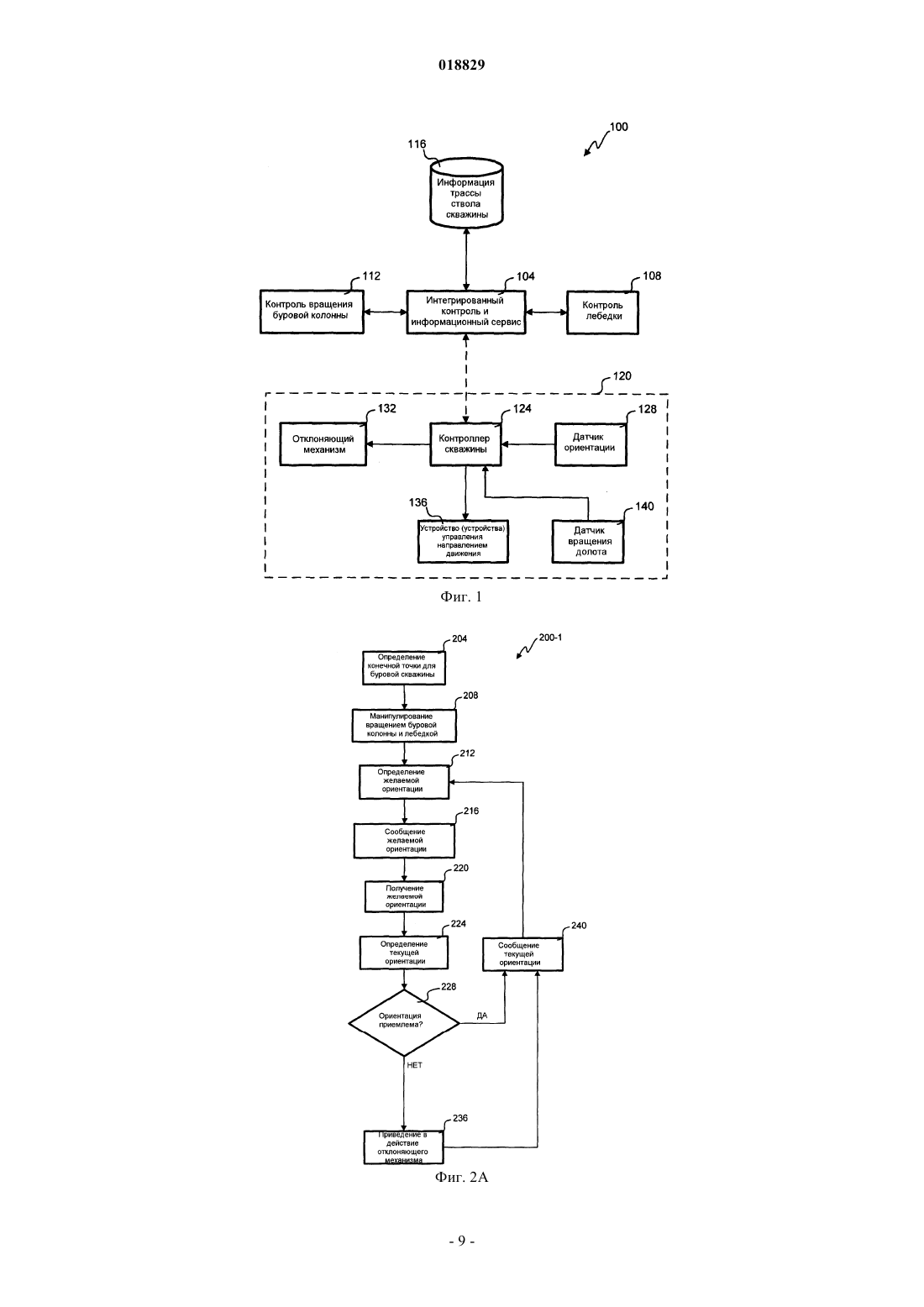
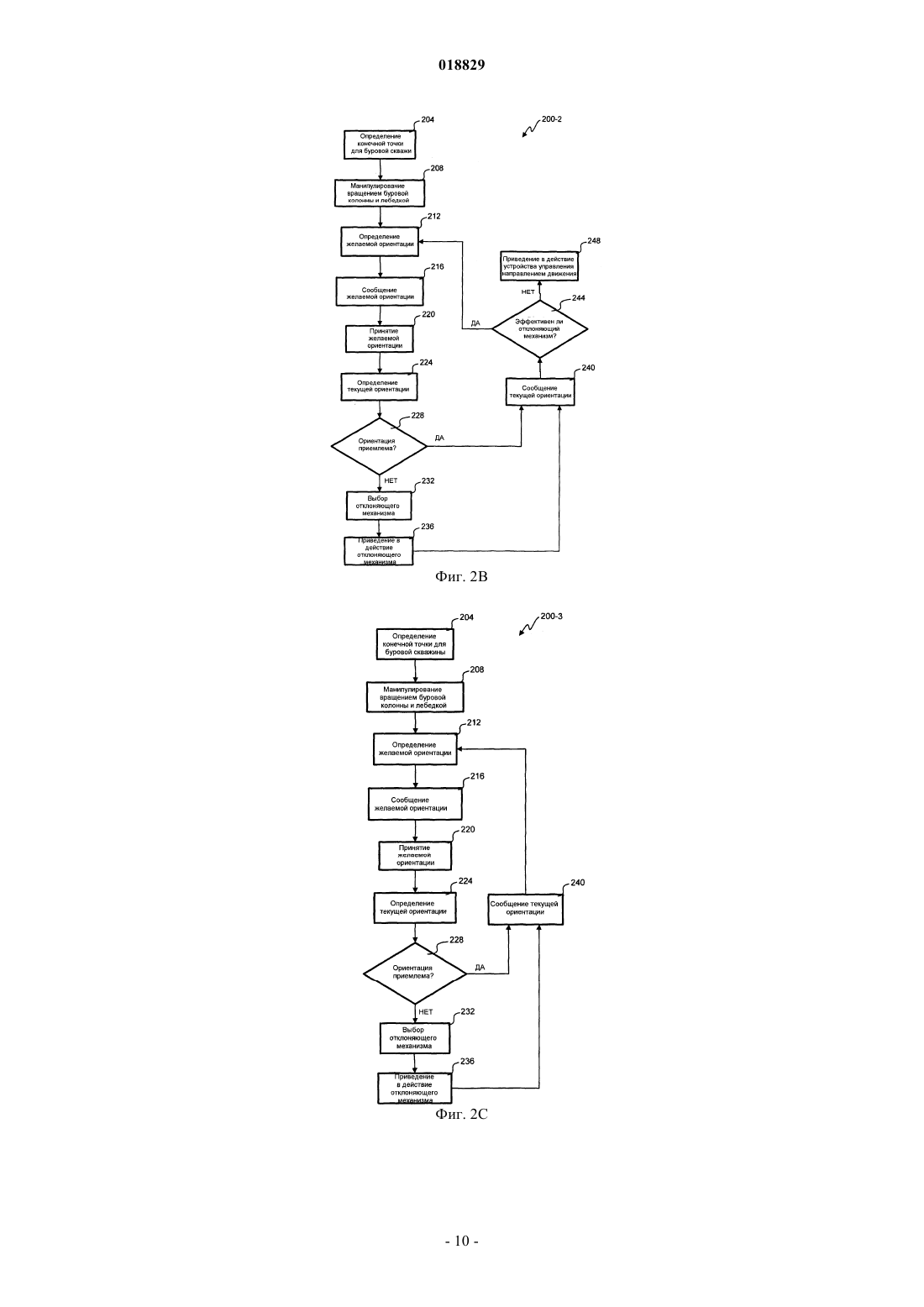
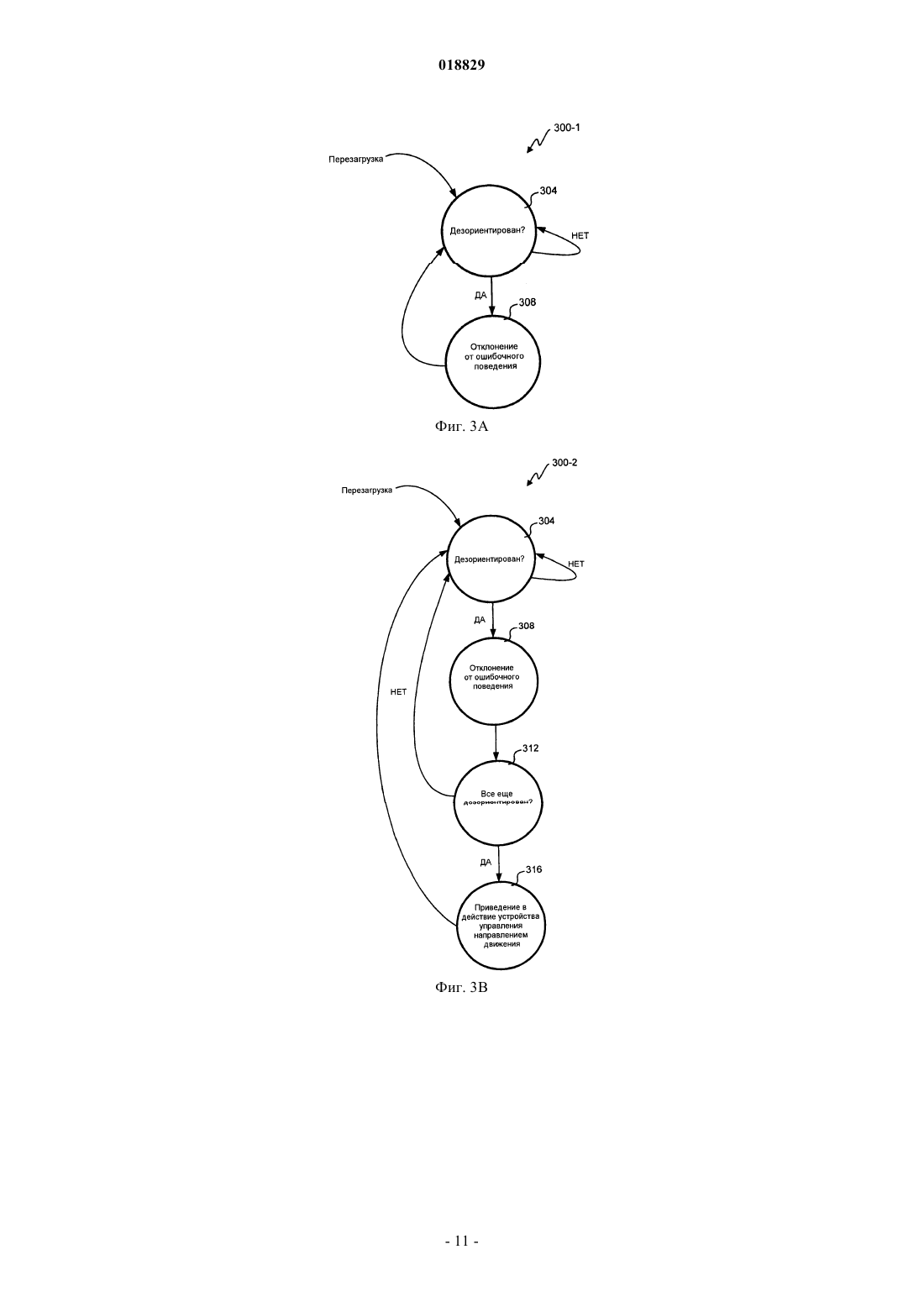
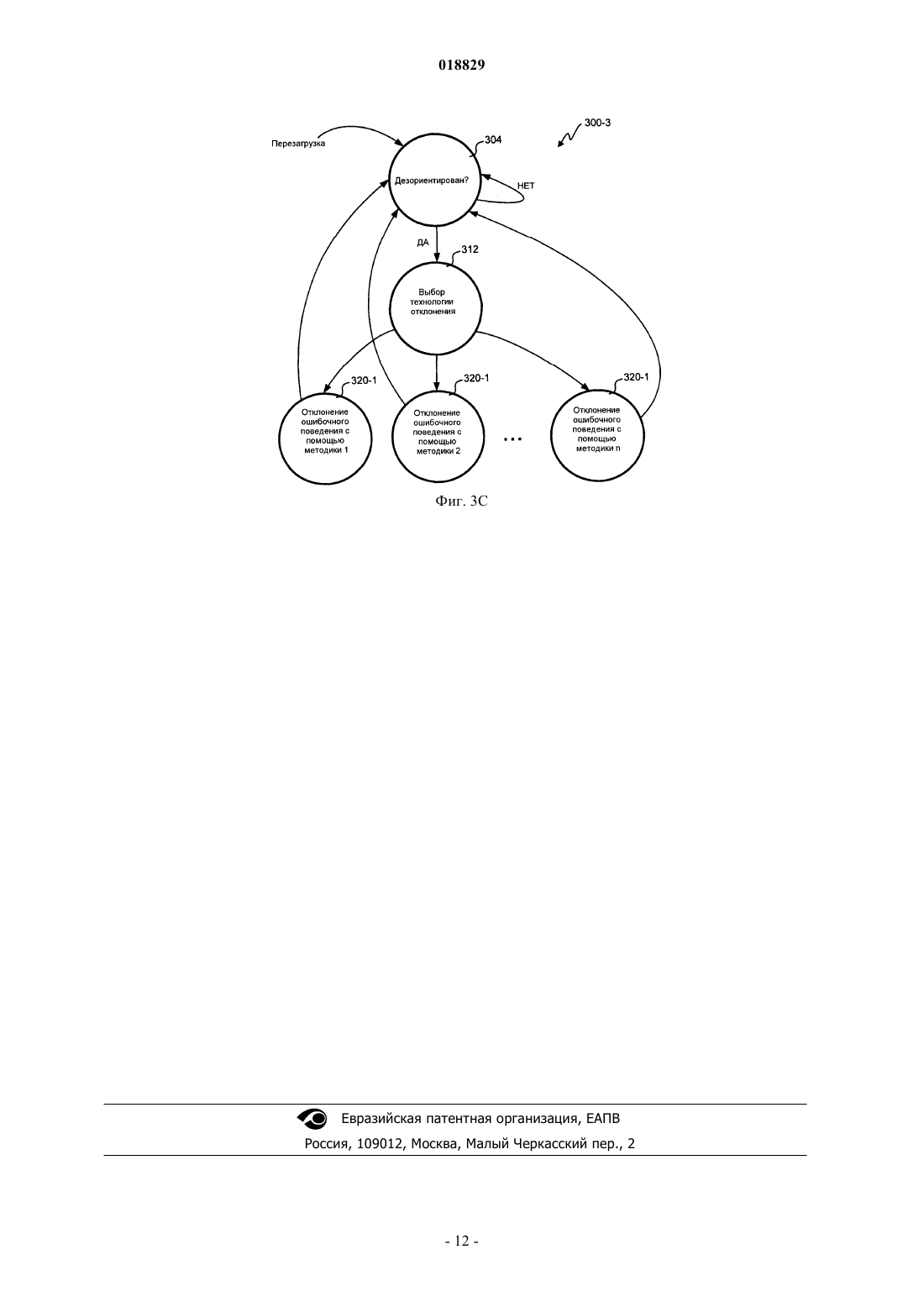
КОНТРОЛЬ СТОХАСТИЧЕСКОГО ШУМА БУРОВОГО ДОЛОТА Предложена направляющая система для бурового долота и способ, которые изменяют или отклоняют стохастическое движение бурового долота и/или стохастические взаимодействия между буровым долотом и внутренней стенкой ствола буровой скважины, которая бурится буровой системой, для изменения направления бурения буровой системы. Направление бурового долота отслеживают для определения того, совпадает ли направление с предпочтительным направлением. Если направление не является достаточно близким к предпочтительному направлению,отклоняющий механизм изменяет стохастическое движение в попытке модифицирования направления для приближения к предпочтительному направлению. Может использоваться любой из множества отклоняющих механизмов. Некоторые варианты осуществления могут прибегать к традиционным устройствам управления направлением движения в дополнение к отклоняющему механизму. Уровень техники Настоящее изобретение относится в целом к бурению буровой скважины и, но не ограничиваясь этим, к управлению направлением бурения буровой скважины. Во многих отраслях промышленности зачастую желательно направленно бурить буровую скважину в пласте или бурить с отбором керна ствол скважины в подземных пластах для того, чтобы буровая скважина и/или выбуриваемые образцы керна могли обойти залежи и/или резервуары в пласте для достижения заданной цели в пласте и/или в чем-либо подобном и/или пройти через них. При бурении для отбора керна или при бурении ствола скважины в подземных пластах иногда желательно иметь возможность для изменения и контроля направления бурения, например, направлять буровую скважину к желаемой цели,или контролировать горизонтальное направление в области, содержащей углеводороды, после достижения цели. Также может быть желательным исправление отклонения от желаемого направления при бурении прямой вертикальной скважины или контроль направления ствола скважины для того, чтобы устранять препятствия на пути. При добыче углеводородов, например, буровая скважина может буриться так, чтобы она пересекала конкретный подземный пласт в конкретном месте. В некоторых способах бурения для того, чтобы пробурить заданную буровую скважину, траектория бурения через пласт может быть спланирована предварительно, и буровая система контролируется так, чтобы буровая скважина соответствовала траектории. В других способах или в сочетании с предыдущим способом могут определяться конечные требования к скважине, и ход бурения буровой скважины в пласте может отслеживаться во время процессов бурения,и могут осуществляться шаги для обеспечения выполнения указанных конечных требований для скважины. Кроме того, работа буровой системы может контролироваться для обеспечения экономичного бурения, которое может включать такое бурение, чтобы пройти через пласт настолько быстро, насколько это возможно, такое бурение, чтобы снизить износ долота, такое бурение, чтобы достигнуть оптимального бурения через пласт и оптимального износа долота и/или чего-либо подобного. Один из аспектов бурения называется "направленное бурение". Направленное бурение представляет собой намеренное отклонение буровой скважины/ствола скважины от маршрута, который он принял бы естественным образом. Другими словами, направленное бурение представляет собой управление направлением буровой колонны так, чтобы она проходила в заданном направлении. Направленное бурение является преимущественным при бурении в открытом море, так как оно обеспечивает бурение множества скважин с одной платформы. Также направленное бурение обеспечивает горизонтальное бурение сквозь резервуар. Горизонтальное бурение дает возможность для получения более длинного ствола скважины для прохождения резервуара, что повышает производительность скважины. Система направленного бурения также может использоваться при операциях вертикального бурения. Часто буровое долото будет отклоняться от хода запланированной траектории бурения из-за непредсказуемого влияния природы проходимых пластов или из-за различных сил, которые действуют на буровое долото. При возникновении такого отклонения система направленного бурения используется для возвращения бурового долота назад на курс. Способ мониторинга направленного бурения буровой скважины может включать в себя определение расположения бурового долота в пласте, определение ориентации бурового долота в пласте, определение осевой нагрузки на долото буровой системы, определение скорости бурения через пласт, определение характеристик пробуриваемого пласта, определение характеристик подземного пласта, окружающего буровое долото, прогнозирование характеристик пласта перед буровым долотом, сейсмический анализ пласта, определение характеристик резервуаров и так далее, непосредственно у бурового долота,измерение давления, температуры и/или чего-либо подобного в буровой скважине и/или вокруг буровой скважины и/или чего-либо подобного. При любом способе направленного бурения ствола буровой скважины, следует ли оно предварительно спланированной траектории или нет, мониторинг процесса бурения и/или условий бурения, и/или чего-либо подобного является необходимым для того, чтобы иметь возможность управлять направлением движения буровой системы. Силы, которые действуют на буровое долото в способе бурения, включают силу тяжести, вращающий момент, создаваемый долотом, концевую нагрузку, прилагаемую к долоту, и изгибающий момент от бурового узла. Эти силы вместе с типом пробуриваемого пласта и наклоном пласта по отношению к стволу скважины могут создать сложную систему взаимодействий сил при процессах бурения. Буровая система может содержать систему "вращательного бурения", в которой забойный узел содержит буровое долото, которое соединяется с бурильной колонной, которая может приводиться в действие/во вращение с буровой платформы. В системе вращательного бурения направленное бурение буровой скважины может обеспечиваться различными факторами, такими как осевая нагрузка на долото, скорость вращения и так далее. Относительно вращательного бурения известные способы направленного бурения включают использование системы вращательного ориентирования (RSS). В RSS бурильная колонна вращается с поверхности, и скважинные устройства заставляют буровое долото бурить в заданном направлении. Вращение бурильной колонны значительно снижает количество случаев вывешивания бурильной колонны или застревания во время бурения. Буровые системы вращательного ориентирования для бурения отклоненных буровых скважин в грунте могут в целом классифицироваться либо как системы "позиционирования долота", либо как системы "давления на долото". В системах позиционирования долота ось вращения бурового долота отклоняется от локальной оси оборудования низа буровой колонны (ВНА) в главном направлении нового ствола. Ствол скважины разводится в соответствии с обычной трехточечной геометрией, определенной верхними и нижними точками касания стабилизатора и бурового долота. Угол отклонения оси бурового долота в сочетании с конечным расстоянием между буровым долотом и нижним стабилизатором приводит к неколлинеарным условиям, необходимым для генерирования изгиба. Существует много путей, с помощью которых это может быть достигнуто, включая фиксированный изгиб в некоторой точке на оборудовании низа буровой колонны, ближайшей к нижнему стабилизатору, или изгиб приводного вала бурового долота, распределенный между верхним и нижним стабилизатором. Позиционирование долота может включать использование забойного двигателя для вращения бурового долота, двигатель и буровое долото монтируются на бурильной колонне, которая содержит изгиб под некоторым углом. В такой системе буровое долото может соединяться с двигателем с помощью механизма/соединения типа петли или с помощью наклонного механизма/соединения, изогнутого переходного элемента или чего-либо подобного, где буровое долото может отклоняться относительно двигателя. Когда необходимо изменение направления бурения, вращение бурильной колонны может останавливаться, и долото может располагаться в буровой скважине с использованием забойного двигателя в необходимом направлении, и вращение бурового долота может начинать бурение в желаемом направлении. При таком расположении направление бурения зависит от углового положения бурильной колонны. В своей идеальной форме, в системе позиционирования долота, буровому долоту не требуется срезать породу в поперечном направлении, так как ось долота все время вращается в направлении изгиба ствола скважины. Примеры регулируемых систем типа вращательного позиционирования долота и то,как они работают, описываются в публикациях заявок на патент США 2002/0011359; 2001/0052428 и в патентах США 6394193; 6364034; 6244361; 6158529; 6092610 и 5113953, все они включаются в настоящий документ в качестве ссылок во всей своей полноте. Системы и способы давления на долото используют приложение прижимного усилия к стенке буровой скважины, чтобы изогнуть бурильную колонну и/или заставить буровое долото бурить в предпочтительном направлении. В системе вращательного ориентирования с давлением на долото достигается необходимое условие неколлинеарности, заставляя механизм прикладывать усилие или создавать смещения в направлении, которое предпочтительно ориентируется относительно направления разведения ствола. Существует множество путей, с помощью которых это может достигаться, включая подходы, не включающие вращения (относительно ствола скважины), подходы на основе смещения и приводов на эксцентриках, которые прикладывают усилие к буровому долоту в направлении необходимого поворота. К тому же, поворот достигается созданием неколлинеарности между буровым долотом и по меньшей мере двумя другими точками касания. В своей идеальной форме буровому долоту требуется срезать боковины для создания искривленного ствола скважины. Примеры вращающихся поворотных систем типа с давлением на долото, и то, как они работают, описываются в патентах США 5265682; 5553678; 5803185; 6089332; 5695015; 5685379; 5706905; 5553679; 5673763; 5520255; 5603385; 5582259; 5778992; 5971085, все они включаются в качестве ссылок в данный документ. Известные формы RSS снабжаются механизмом "обратного вращения", который вращается в направлении, противоположном к вращению бурильной колонны. Как правило, обратное вращение происходит с той же скоростью, что и вращение бурильной колонны, так, чтобы секция с обратным вращением поддерживалась в том же наклонном положении относительно внутренней стороны буровой скважины. Так как секция с обратным вращением не вращается относительно буровой скважины, специалистами в данной области она часто называется "геостационарной". В настоящем изобретении не делается различия между термином "вращающаяся в противоположном направлении" и "геостационарная". Система давления на долото, как правило, использует или внутренний или внешний стабилизатор обратного вращения. Стабилизатор обратного вращения остается под фиксированным углом (или геостационарным) относительно стенки буровой скважины. Когда буровая скважина должна отклониться,привод отжимает башмак от стенки буровой скважины в направлении, противоположном к необходимому отклонению. Результатом является то, что буровое долото толкается в желаемом направлении. Усилия, генерируемые приводами/башмаками, компенсируются усилием изгиба оборудования низа буровой колонны, и усилие вызывает ответную реакцию посредством приводов/башмаков на противоположной стороне оборудования низа буровой колонны, и усилие противодействия действует на режущие элементы бурового долота, тем самым управляя направлением ствола скважины. В некоторых ситуациях усилие от башмаков/приводов может быть достаточно большим, чтобы эродировать формацию там, где применяется система. Например, система Schlumberger Powerdrive использует три башмака, установленных вокруг секции оборудования низа буровой колонны, для синхронного использования от оборудования низа буровой колонны для проталкивания долота в его направлении и управления пробуриваемой буровой скважиной. В этой системе башмаки закрепляются близко, в интервале 1-4 футов (30,48-121,9 см), за долотом и приводятся в движение/приводятся в действие потоком бурового раствора, взятого из промывочной жидкости. В других системах осевая нагрузка на долото, созданная буровой системой, или отклоняющий клин, или что-либо подобное может использоваться для ориентации буровой системы в буровой скважине. Хотя система и способы приложения усилия к стенке буровой скважины и использования усилий реакции для проталкивания бурового долота в определенном направлении или смещения долота для бурения в желаемом направлении могут использоваться с системами бурения, содержащими систему вращательного бурения, эти системы и способы могут иметь недостатки. Например, такие системы и способы могут требовать приложения больших усилий к стенке буровой скважины для изгиба бурильной колонны и/или ориентирования бурового долота в буровой скважине; такие усилия могут быть порядка 5 кН или больше, это может требовать для получения этих усилий больших/сложных забойных двигателей или чего-либо подобного. В дополнение к этому множество систем и способов могут использовать повторяющееся упорное давление башмаков/привода в направлении от оси на стенку буровой скважины,когда оборудование низа буровой колонны вращается, для образования противодействующих усилий для проталкивания бурового долота, что может требовать сложных/дорогих/требующих высоких эксплуатационных расходов систем синхронизации, требующих сложных систем контроля и/или чего-либо подобного. Буровое долото, как известно, совершает "танец" или круговые биения в буровой скважине непредсказуемым или даже беспорядочным образом. Это стохастическое движение является в целом недетерминированным в том смысле, что текущее положение полностью не определяет его следующее положение. Технологии позиционирования долота и давления на долото используются для того, чтобы направлять буровое долото в определенном направлении и преодолевать склонность бурового долота к совершению круговых биений. Эти технологии не учитывают стохастический танец бурового долота, который является вероятным в отсутствие направленного усилия. Сущность изобретения В одном из вариантов осуществления настоящее изобретение предусматривает направляющую систему для бурового долота, которая изменяет или отклоняет стохастическое или естественное движение бурового долота и/или стохастические усилия противодействия между буровым долотом и/или измерительными башмаками и внутренней стенкой пробуриваемой буровой скважины для изменения направления бурения. Изменение направления бурения может в определенных аспектах достигаться с меньшими усилиями, менее сложным поверхностным/подземным оборудованием и/или более экономично, чем с помощью традиционных устройств управления направлением движения. Направление бурового долота относительно грунта (или некоторой другой неподвижной точки) отслеживается для определения того,совмещается ли направление с некоторым предпочтительным направлением. Если направление недостаточно близко к предпочтительному направлению, отклоняющий механизм выделяет компоненты радиального движения для перемещения направления ближе к предпочтительному направлению. Может использоваться любое количество отклоняющих механизмов. Некоторые варианты осуществления могут прибегать к традиционным устройствам управления направлением движения в дополнение или альтернативы отклоняющему механизму. В другом варианте осуществления описывается способ отклонения ошибочного движения бурового долота, чтобы заставить долото направленно бурить в заданном направлении относительно грунта. При этом определяют направление бурового долота относительно грунта, определяемое направление сравнивают с заданным направлением. Отклоняющий механизм ориентируют для выделения компонентов радиального движения бурового долота в заданном направлении. Отклоняющий механизм приводят в действие, когда при сравнении определяют, что определяемое направление недостаточно совпадает с заданным направлением. В другом варианте осуществления предложена направляющая система для бурового долота для отклонения ошибочного движения бурового долота, чтобы заставить долото направленно бурить в заданном направлении относительно грунта. Направляющая система для бурового долота содержит отклоняющий механизм, датчик направления и контроллер. Отклоняющий механизм выделяет компоненты радиального движения бурового долота в заданном направлении бурового долота относительно грунта. Датчик направления определяет направление бурового долота внутри скважины. Контроллер сравнивает заданное направление с направлением отклонения. Отклоняющий механизм приводится в действие, когда направление отклоняется от заданного направления. Дополнительные области применения настоящего изобретения будут понятны из подробного описания, приведенного ниже в данном документе. Должно быть понятно, что подробное описание и конкретные примеры, хотя и показывают различные варианты осуществления, предназначаются только для целей иллюстрации и не предназначаются для обязательного ограничения рамок изобретения. Краткое описание чертежей Настоящее изобретение описывается в сочетании с прилагаемыми чертежами, на которых фиг. 1 - блок-схема одного из вариантов осуществления направляющей системы для бурового долота; фиг. 2 А и 2 С - блок-схема вариантов осуществления способа контроля направления бурового долота; фиг. 3 А и 3 С - конечный автомат для управления направляющей системы для бурового долота. На прилагаемых чертежах сходные компоненты и/или функции могут иметь сходные ссылочные номера. Также различные компоненты одного типа могут выделяться ссылочным номером с последующей штриховкой и вторым ссылочным номером, по которому они различаются для сходных компонентов. Если в описании используется только первый ссылочный номер, описание применимо к любым сходным компонентам, имеющим одинаковый первый ссылочный номер, независимо от второго ссылочного номера. Подробное описание изобретения Последующее описание предусматривает только предпочтительный типичный вариант осуществления (варианты осуществления) и не предназначается для ограничения применения или конфигурации изобретения. Скорее, последующее описание предпочтительного типичного варианта осуществления(вариантов осуществления) обеспечит специалистов в данной области направляющим описанием для осуществления предпочтительного типичного варианта осуществления. Является очевидным, что различные изменения в функции и организации элементов могут быть проделаны без отступления от его духа и рамок, как излагается в приложенной формуле изобретения. Обращаясь сначала к фиг. 1, здесь показывается блок-схема одного из вариантов осуществления направляющей системы для бурового долота 100. Интегрированный контроль и служба информации(ICIS) 104 располагаются в наземных сооружениях для управления блоком контроля вращения буровой колонны 112 и блоком контроля буровой лебедки 108. В дополнение к этому, ICIS 104, как правило, направляет направление бурения в пласте. Информация передается в скважину на оборудование низа буровой колонны (ВНА) 120 с тем, чтобы достичь желаемой ориентации или направления для бурового долота и для возможного выбора различных отклоняющих устройств и устройств управления направлением движения 132, 136 для использования. Направление определяется относительно любой неподвижной точки, такой как грунт. Информация может, в дополнение к этому, предусматривать информацию контроля для ВНА 120 и для любых отклоняющих устройств и устройств управления направлением движения 132, 136.ICIS 104 управляет блоком контроля вращения бурильной колонны 112 и блоком контроля буровой лебедки 108. Фаза, вращающий момент и скорость вращения бурильной колонны отслеживаются и управляются блоком контроля бурильной колонной 112. Информация от ВНА 120 может анализироваться с помощью ICIS 104 как отрицательная обратная связь на то, как выполняется управление блоком контроля бурильной колонны 112. Различные операции во время бурения используют блок контроля лебедки 108, например, при удалении бурильной колонны. ICIS 104 управляет работой блока контроля лебедки 108 во время этих операций. ВНА 120 содержит внутрискважинный контроллер 124, датчик ориентации или направления 128,датчик вращения долота 140, один или несколько отклоняющих механизмов 132 и одно или несколько устройств управления направлением движения 136. Типичное ВНА может иметь большее количество систем контроля, которые не показываются на фиг. 1. Информация передается на ВНА 120 с поверхности для индикации предпочтительного направления бурового долота. В дополнение к этому, использование отклоняющих устройств и устройств управления направлением движения 132, 136 может, как правило,контролироваться с помощью ICIS 104, но внутрискважинный контроллер 124 контролирует в реальном времени работу отклоняющих устройств и устройств управления направлением движения 132, 136 с помощью информации, собранной от датчиков направления долота и датчиков вращения долота 128, 140. Информация передается от ВНА 120 назад к ICIS 104 на поверхности. Наблюдаемое направление бурового долота может периодически передаваться вместе с использованием различных средств отклонения и устройств управления направлением движения 132, 136. База данных информации маршрута буровой 116 хранит информацию, собранную внутри скважины для того, чтобы знать, как прокладывается в пласте буровая скважина. ICIS 104 может пересчитать наилучшую ориентацию или направление,используемую буровым долотом, и передать это на ВНА 120 для перенастройки предыдущих инструкций. В дополнение к этому, эффективность различных средств отклонения и устройств управления направлением движения 132, 136 может анализироваться с помощью другой информации, собранной в пласте, для создания инструкций для скважинного оборудования относительно того, как лучше использовать имеющиеся средства отклонения и устройства управления направлением движения 132, 136 для достижения геометрии буровой скважины, желаемой для конкретной буровой площадки. Датчик направления 128 может определять текущее направление бурового долота относительно конкретной системы координат в трех измерениях (то есть относительно грунта или некоторой другой неподвижной точки). Могут использоваться различные технологии для определения текущего направления, например платформы, стабилизированные инерционно, или платформы, стабилизированные вращением, с помощью гироскопов, могут сравниваться с эталонами на буровом долоте, могут использоваться акселерометры для отслеживания направления и/или магнетометры могут измерять направление относительно магнитного поля земли. Измерения могут затрудняться шумами, но может использоваться фильтр для устранения шума с помощью накопления сигнала от измерений. Датчик вращения долота 140 предоставляет возможность мониторинга фазы вращения бурового долота. Внутрискважинный контроллер 124 принимает информацию от сенсора для получения возможности синхронизированного контроля отклоняющего механизма (механизмов) 132. Зная фазу, средства отклонения могут применяться на каждом цикле вращения или через любое целое число циклов (например, каждый второй оборот, каждый третий оборот, каждый четвертый оборот, каждый десятый оборот и так далее). Другие варианты осуществления не используют датчик вращения долота 140 или синхронизирующую манипуляцию отклоняющим механизмом (механизмами) 132. Существуют различные механизмы устройств управления направлением движения 136, которые устойчиво воздействуют на движение бурового долота. Устройства управления направлением движения 136 непреднамеренно пользуются преимуществом стохастического движения бурового долота, которое происходит естественным образом. На данной площадке может использоваться одно или несколько из этих устройств управления направлением движения 136 для создания буровой скважины, которая изменяет направления прохождения через пласт по желанию. Различные типы устройств управления направлением движения 136 включают изогнутые тонармы, плечо рычага, синхронизированное с вращением,универсальные соединения и геостационарные механизмы, которые прилагают усилия в конкретном направлении. Эти устройства управления направлением движения могут прогнозируемо направлять буровое долото, но не пользуются преимуществом стохастического движения бурового долота, которое случайно может находиться в правильном направлении. Другие варианты осуществления могут отказаться от устройств управления направлением движения 136, полностью основываясь на отклоняющих механизмах 132 для направленного бурения. Отклоняющий механизм 132 может использоваться до обращения к устройству управления направлением движения 136. Отклоняющий механизм 132 выбирает или выделяет те компоненты радиального движения бурового долота, которые находятся в выбранном направлении. Управление по направлению достигается с помощью удерживания ориентации отклоняющего механизма 132 приблизительно фиксированной в выбранном направлении. Некоторые варианты осуществления внутри скважины могут иметь только один или несколько отклоняющих механизмов 132 без каких-либо устройств управления направлением движения 136. Отклоняющие механизмы 132 пользуются преимуществом склонности бурового долота к движению по кругу в стволе скважины, они приводятся в действие только тогда, когда стохастическое движение происходит в неправильном направлении. Например, измерительные башмаки или режущие элементы могут двигаться, калибратор может оказывать давление, и/или гидромониторное бурение может использоваться в различных вариантах осуществления как отклоняющий механизм 132. Любая асимметрия с возможностью манипулирования полезна как отклоняющий механизм 132. В некоторых случаях буровое долото конструируется и изготавливается так, чтобы вызывать прижимное усилие в конкретном азимутальном направлении относительно бурового долота. Отклоняющий механизм 132 приводится в действие для отклонения прижимного усилия. Такое прижимное усилие вращается вместе с буровым долотом, чтобы выделить резание в выбранном направлении. Отклоняющий механизм 132 может синхронизироваться для включения и выключения при вращении бурового долота. Внутрискважинный контроллер 124 использует информацию, которая посылается от ICIS 104, вместе с датчиками направления и вращения долота 128, 140 для активного управления использованием средств отклонения и устройств управления направлением движения 132, 136. Желаемое направление бурового долота вместе с инструкциями для использования различных средств отклонения и устройствами управления направлением движения 132, 136 передается от ICIS 104. Внутрискважинный контроллер 124 может использовать нечеткую логику, нейронные алгоритмы, алгоритмы систем с искусственным интеллектом для принятия решения о том, как и когда нужно воздействовать на направление бурового долота в различных вариантах осуществления. Как правило, скорость взаимодействия между ВНА 120 и ICIS 104 не предоставляет в этом варианте осуществления возможности для контроля с поверхности в реальном времени, но другие варианты осуществления могут предоставлять возможность контроля с поверхности в реальном времени. Стохастическое направление бурового долота может использоваться адаптивно менее жестким образом. Например, если в будущем является желательным поворот в буровой скважине и буровое долото делает этот поворот преждевременно, поворот может приниматься и план на будущее пересматривается. На фиг. 2 А показывается блок-схема варианта осуществления способа 200-1 контроля направления бурового долота. Этот вариант осуществления использует только один отклоняющий механизм 136 для контроля направления бурового долота. Изображенная часть способа находится в блоке 204, где выполняется анализ пласта и конечной точки для планирования геометрии буровой скважины. ICIS 104 манипулирует бурильной колонной, лебедкой и другими системами в блоке 208 для создания буровой скважины согласно плану. Желаемое направление бурового долота определяется в блоке 212 и сообщается внутрискважинному контроллеру 124 в блоке 216. Желаемое направление может представлять собой единственную цель или ряд приемлемых направлений. Желаемое направление вместе с любыми критериями выбора средств отклонения принимается внутрискважинным контроллером 124 в блоке 220. Текущее позиционирование бурового долота опреде-5 018829 ляется датчиком направления 128 в блоке 224. Приемлемо ли направление на основе инструкций от ICIS 104, определяется в блоке 228. Этот вариант осуществления позволяет некоторую гибкость в направлении и переопределяет план на основе стохастического движения, давая возможность для его осуществления. Приемлемое направление представляет собой то, которое предоставляет возможность для достижения конечной точки с помощью бурового долота, если план был пересмотрен. Определенный план может иметь заданные отклонения или диапазон направлений, которые являются приемлемыми, но попрежнему устраняет с пути части пласта, через которые проходить нежелательно. Там, где направление является неприемлемым, обработка переходит от блока 228 к блоку 236, где приводится в действие отклоняющий механизм 132. Отклоняющий механизм 132 может приводиться в действие единовременно или в течение некоторого периода времени. Альтернативно отклоняющий механизм 132 может приводиться в действие периодически в синхронизации с вращением бурового долота. Отклоняющий механизм 132 выбирает или выделяет те компоненты радиального движения бурового долота, которые осуществляются в желаемом направлении (направлениях). Там, где направление является приемлемым, как определено в блоке 228, обработка продолжается до блока 240. Отклоняющий механизм 132 достигает управления по направлению путем удерживания направления в желаемом направлении (направлениях). Там, где это не нужно, так как ошибочное движение бурового долота уже находится среди желаемых направлений, отклоняющий механизм 132 не включается. В блоке 240 текущее направление передается с помощью внутрискважинного контроллера 124 наICIS 104. После сообщения обработка возвращается в начало цикла к блоку 212 для дальнейшего управления направлением, основанного на любой новой инструкции с поверхности. На фиг. 2 В показана блок-схема другого варианта осуществления способа 200-2 контроля направления бурового долота. Этот вариант осуществления имеет множество доступных отклоняющих механизмов 132 и может прибегать к устройствам управления направлением движения 136, если отклоняющий механизм (механизмы) 132 является неэффективным. Блоки до блока 228, как правило, работают так же, как вариант осуществления на фиг. 2 А. Когда направление является неприемлемым в блоке 228, обработка переходит к блоку 232, где делается выбор по меньшей мере из двух отклоняющих механизмов 232. Инструкции от ICIS 104 могут предписывать решение относительно того, какие отклоняющие механизмы 132 выбирать и каким образом они должны контролироваться или воздействовать на него. Выбранный отклоняющий механизм 132 используется на стадии 236. После использования отклоняющего механизма 132 текущее направление сообщается на ICIS 104 в блоке 240. Если отклоняющий механизм 132 или какой-либо другой отклоняющий механизм все еще, как предполагается, является эффективным для ориентирования бурового долота в блоке 244, то обработка возвращается к началу цикла к блоку 212 для продолжения использования этого отклоняющего механизма 132 или какого-либо другого отклоняющего механизма 132, который может оказывать влияние на эти компоненты радиального движения бурового долота для приложения прижимающего усилия в определенном азимутальном направлении, по желанию. Когда отклоняющие механизмы 132 определяются в блоке 244 как уже неэффективные, обработка переходит к блоку 248 для включения устройства управления направлением движения 136, если таковое имеется. На фиг. 2 С показывается блок-схема еще одного варианта осуществления способа 200-3 контроля направления бурового долота. Этот вариант осуществления представляет собой вариант, сходный с тем,что на фиг. 2 А, за исключением того, что в блоке 232 может выбираться множество отклоняющих механизмов 132. Этот вариант осуществления основывается на отклоняющем механизме 132 без обращения к устройствам управления направлением движения 136. На фиг. 3 А показывается один из вариантов осуществления конечного автомата 300-1 для управления направляющей системой для бурового долота 100. Эта система контроля перемещается между двумя положениями на основе определения в положении 304 того, не находится ли буровое долото в совмещении с желаемым направлением или диапазоном направлений. Этот вариант осуществления соответствует варианту осуществления на фиг. 2 А. Там, где существует дезориентация за пределами приемлемого отклонения, направляющая система для бурового долота 100 переходит из положения 304 к положению 308. В положении 308 один или несколько отклоняющих механизмов пробуют привести в действие 132. В некоторых случаях тот же отклоняющий механизм 132 пробуют привести в действие при других параметрах. Например, контрольный башмак может перемещаться с одной фазой в цикле вращения долота,но позднее пробуют задать другую фазу при таком же или другом движении контрольного башмака. На фиг. 3 В показывается другой вариант осуществления конечного автомата 300-2 для управления направляющей системой для бурового долота 100. Этот вариант осуществления имеет четыре положения и в целом соответствует варианту осуществления на фиг. 2 В. После осуществления попытки включения отклоняющего механизма 132 в положении 308, определение в положении 312 используется для того,чтобы увидеть, был ли эффективен отклоняющий механизм 132. Когда отклоняющий механизм 132 работает удовлетворительно, система возвращается к положению 304. Если отклоняющий механизм 132 является неэффективным, направляющая система для бурового долота 100 переходит из положения 312 к положению 316, где активное устройство управления направлением 136 используется до возвращения в положение 304. На фиг. 3 С показывается другой вариант осуществления конечного автомата 300-3 для управления направляющей системой для бурового долота 100. Этот вариант осуществления имеет некоторое количество технологий отклонения и в целом относится к способу 200-3 на фиг. 2 С. Когда в положении 304 обнаруживается дезориентация, в положении 312 выбирается отклоняющий механизм или технология отклонения. Альтернативно, в положении 312 может выбираться некоторое количество технологий отклонения. Выбранная технология отклонения осуществляется в выбранном положении отклонения 320 довозращения в положение 304 для дальнейшего анализа любой дезориентации. Также может использоваться некоторое количество вариантов и модификаций описанных вариантов осуществления. Например, изобретение может использоваться при бурении буровых скважин или скважин для отбора керна. В вариантах осуществления, описанных выше, контроль способов отклонения разделяется между ICIS и ВНА. В других вариантах осуществления весь контроль может находиться в любом из расположений. В описании, приведенном выше, конкретные подробности приводятся для того, чтобы обеспечить полное понимание вариантов осуществления. Хотя является очевидным, что варианты осуществления могут осуществляться и без этих конкретных подробностей. Например, электрические схемы могут показываться на блок-схемах для того, чтобы не затемнять варианты осуществления в излишних подробностях. В других примерах хорошо известные электрические схемы, способы, алгоритмы, структуры и технологии могут показываться без излишних подробностей во избежание затемнения вариантов осуществления. Осуществление технологий, блоков, стадий и описанных выше средств может происходить различными путями. Например, эти технологии, блоки, стадии, средства могут осуществляться в аппаратном обеспечении, программном обеспечении или в их сочетании. Для аппаратной реализации установки для обработки могут воплощаться в одной или нескольких специализированных интегральных микросхемах(ASIC), процессорах для цифровых сигналов (DSP), устройствах цифровой обработки сигналов (DSPD),программируемых логических устройствах (PLD), логических матрицах, программируемых пользователем (FPGA), процессорах, контролерах, микроконтроллерах, микропроцессорах, других электронных устройствах, сконструированных для выполнения функций, описанных выше, и/или в их сочетаниях. Также отметим, что варианты осуществления могут описываться как способ, который описывается как блок-схема, принципиальная схема, блок-схема алгоритма, структурная схема или алгоритм. Хотя блок-схема может описывать операции как многостадийный процесс, множество операций могут выполняться параллельно или последовательно. В дополнение к этому порядок операций может перераспределяться. Способ прекращается, когда заканчиваются его операции, но он может иметь дополнительные стадии, не включенные в чертежи. Способ может соответствовать способу, функции, процедуре, подпрограмме, части программы и так далее. Когда способ соответствует функции, его завершение соответствует возвращению функции к вызывающей функции или к основной функции. Кроме того, варианты осуществления могут осуществляться аппаратными средствами, программными средствами, языками сценариев, программно-аппаратными средствами, межплатформенным программным обеспечением, микрокомандой, языком описания аппаратных средств и/или любым их сочетанием. При осуществлении аппаратными средствами, программными средствами, языками сценариев,программно-аппаратными средствами, межплатформенным программным обеспечением, микрокомандой, программным кодом или сегментами кода для выполнения необходимые задачи могут храниться на машинно-считываемом носителе, таком как носитель информации. Сегмент кода или инструкция, исполняемая машиной, может представлять собой процедуру, функцию, подпрограмму, программу, последовательность, стандартную подпрограмму, модуль, программный пакет, скрипт, класс или любое сочетание инструкций, структур данных и/или операторов программ. Сегмент кода может соединяться с другим сегментом кода или аппаратной схемой с помощью прохождения и/или получения информации,данных, аргументов, параметров и/или содержимого памяти. Информация, аргументы, параметры, данные и так далее могут проходить, направляться или передаваться через любое подходящее средство,включая совместное использование памяти, передачу сообщений, эстафетный доступ, сетевую передачу и так далее. Для программно-аппаратной реализации и/или программной реализации методология может осуществляться с помощью модулей (например, процедуры, функции и так далее), которые выполняют описанные в данном документе функции. Любой машиносчитываемый носитель, материально осуществляющий инструкции, может использоваться при реализации методологий, описанных в данном документе. Например, коды программ могут храниться в памяти. Память может осуществляться в процессоре или за пределами процессора. Как используется в данном документе, термин "память" относится к любому типу долгосрочного, краткосрочного, непостоянного, энергонезависимого или другого носителя данных и не ограничивается любым конкретным типом памяти или количеством памяти, или типом носителя, на котором память хранится. Кроме того, как описывается в данном документе, термин "носитель информации" может представлять один или несколько модулей памяти для хранения данных, включая постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), магнитное RAM, запоминающее уст-7 018829 ройство на магнитных сердечниках, запоминающие устройства на магнитных дисках, оптические устройства хранения данных, устройства флэш-памяти и/или другие машиночитаемые носители для хранения информации. Термин "машиночитаемый носитель" включает, но не ограничивается этим, переносные или стационарные устройства хранения, оптические устройства хранения данных, беспроводные каналы и/или другие разнообразные носители информации с возможностью хранения информации, которая содержит или переносит инструкцию (инструкции) и/или данные. Хотя принципы изобретения описываются выше в связи с конкретными устройствами и способами,необходимо четко понять, что настоящее описание приводится исключительно как пример и не ограничивает масштаб изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ отклонения ошибочного движения бурового долота низа буровой колонны при бурении скважины в пласте в заданном направлении, согласно которому определяют направление бурения относительно пласта; сравнивают направление с заданным направлением; при этом используют отклоняющий механизм, который выполнен с возможностью выделения радиального ошибочного движения оборудования низа буровой колонны в заданном направлении; и ориентируют отклоняющий механизм, если при сравнении определяют, что направление не совпадает с заданным направлением, причем в качестве отклоняющего механизма используют измерительный башмак, ассиметрично соединенный с оборудованием низа буровой колонны и удерживаемый в фиксированном направлении. 2. Способ по п.1, согласно которому, чтобы заставить долото направленно бурить в заданном направлении относительно грунта, буровое долото изготавливают с возможностью приложения вращательного бокового усилия вдоль некоторого фиксированного направления относительно бурового долота, и отклоняющий механизм выполняют с возможностью отклонения вращательного бокового усилия, в результате чего буровое долото стремится повернуться к заданному направлению. 3. Способ по п.1, согласно которому, чтобы заставить долото направленно бурить в заданном направлении относительно грунта, дополнительно используют устройство управления направлением движения, под действием которого изменяют направление бурового долота, при этом устройство управления направлением движения представляет собой механизм позиционирования долота. 4. Способ по п.1, согласно которому, чтобы заставить долото направленно бурить в заданном направлении относительно грунта, дополнительно сообщают заданное направление с наземных сооружений. 5. Направляющая система для бурового долота для отклонения ошибочного движения бурового долота, чтобы заставить долото направленно бурить в заданном направлении относительно пласта, причем направляющая система для бурового долота содержит низ буровой колонны с буровым долотом; отклоняющий механизм для выделения компонентов радиального ошибочного движения бурового долота в заданном направлении относительно пласта, причем в качестве отклоняющего механизма используется подвижный измерительный башмак, ассиметрично соединенный с оборудованием низа буровой колонны и удерживаемый в фиксированном направлении; датчик направления для определения направления скважины с буровым долотом,контроллер для сравнения заданного направления с указанным направлением, обеспечивающий возможность ориентирования отклоняющего механизма для выделения составляющих ошибочного движения в определяемом направлении, если контроллер определяет, что направление не совпадает с заданным направлением. 6. Направляющая система по п.5, в которой буровое долото изготовлено с возможностью приложения вращательного бокового усилия вдоль некоторого фиксированного направления относительно бурового долота и отклоняющий механизм выполнен с возможностью отклонения вращательного бокового усилия, в результате чего буровое долото стремится повернуться к заданному направлению. 7. Направляющая система по п.5, в которой контроллер расположен в скважине. 8. Направляющая система по п.5, которая выполнена с возможностью установки заданного направления на поверхности и сообщения его на оборудование низа буровой колонны.
МПК / Метки
МПК: E21B 7/06
Метки: долота, стохастического, шума, контроль, бурового
Код ссылки
<a href="https://eas.patents.su/13-18829-kontrol-stohasticheskogo-shuma-burovogo-dolota.html" rel="bookmark" title="База патентов Евразийского Союза">Контроль стохастического шума бурового долота</a>
Способ и система для определения положения бурового долота
Номер патента: 10955
Опубликовано: 30.12.2008
Автор: Хьорт Ян
МПК: G01V 1/40, E21B 47/09
Метки: положения, бурового, долота, система, определения, способ
Формула / Реферат:
1. Способ определения положения бурового долота (2), включающий определение начального положения бурового долота, определение положения каждого из множества детекторов сейсмических волн (1a-1e, 12a-12d), регистрацию с помощью детекторов данных, относящихся к нестационарным сейсмическим волнам, генерируемым у бурового долота (2), идентификацию событий (k1, k2) у бурового долота на основании параметров сейсмических волн из детекторов, определение...
Способ и устройство для определения удельного электрического сопротивления породы спереди и сбоку долота
Номер патента: 14920
Опубликовано: 29.04.2011
Авторы: Фульда Кристиан, Горек Маттиас
МПК: G01V 3/00
Метки: сопротивления, долота, устройство, электрического, удельного, породы, определения, спереди, способ, сбоку
Формула / Реферат:
1. Устройство для определения значения параметра, связанного с удельным сопротивлением породы, во время пробуривания в ней скважины, содержащеебуровое долото, выполненное с возможностью перемещения на компоновке нижней части бурильной колонны (КНБК), сконфигурированной для пробуривания скважины,электрод на буровом долоте, выполненный с возможностью подачи измерительного тока в породу и электрически изолированный от бурового долота,источник...
Система для регулирования выпуска бурового раствора
Номер патента: 5437
Опубликовано: 24.02.2005
Автор: Ван Рит Эгберт Ян
МПК: E21B 21/08
Метки: система, выпуска, бурового, регулирования, раствора
Формула / Реферат:
1. Система для регулирования выпуска бурового раствора из ствола (3) скважины в пласте (5) земли, содержащая нагнетательные средства (19, 30), предназначенные для нагнетания бурового раствора в ствол (3) скважины, и выпускающее средство (50), предназначенное для выпуска бурового раствора из ствола (3) скважины и содержащее по меньшей мере две напорные камеры (60, 61), выполненные с возможностью попеременного заполнения их буровым раствором,...
Способ прогнозирования скорости проходки с использованием коэффициентов трения скольжения для конкретного долота и механического кпд как функции прочности на всестороннее сжатие
Номер патента: 11469
Опубликовано: 28.04.2009
Авторы: Кэлхоун Уилльям Малкольм, Кайседо Хектор Ульпиано, Эви Расселл Томас
Метки: сжатие, прогнозирования, кпд, трения, скорости, конкретного, прочности, коэффициентов, функции, проходки, использованием, всестороннее, долота, способ, скольжения, механического
Формула / Реферат:
1. Способ определения скорости проходки (ROP) бурового долота, используемого для бурения ствола скважины через интервалы породы подземного пласта, содержащий следующие этапы: определение для по меньшей мере одного типа бурового долота соотношения между коэффициентом трения скольжения для конкретного долота m и прочностью при ограниченном сжатии в диапазоне прочности при ограниченном сжатии, определение для по меньшей мере одного типа бурового...
Оценка шума на одной частоте посредством замера шума на других частотах
Номер патента: 11315
Опубликовано: 27.02.2009
Авторы: Лу Синю, Уиллен Деннис Е.
МПК: G06F 17/50, G06F 19/00
Метки: оценка, шума, других, замера, одной, частотах, посредством, частоте
Формула / Реферат:
1. Способ улучшения отношения сигнал-шум сигнала S(t), причем S(t) содержит сигнал и шум, при этом способ содержит: (a) выполнение измерения S(t) на представляющей интерес частоте; (b) выполнение измерений шума в S(t) на одной или нескольких шумовых частотах, где часть сигнала в S(t), как ожидается, является малой; (c) оценку шума на представляющей интерес частоте, используя измерения шума на одной или нескольких шумовых частотах; и (d)...
Предыдущий патент: Способ разогрева и слива вязких и застывших продуктов из емкости и устройство для его осуществления
Следующий патент: Стабилизированные препараты микрокапсул карбофоса
Случайный патент: Фармацевтические композиции, включающие метформин и глибенкламид, применяемые для лечения сахарного диабета типа ii