Автономная роторная система для воздушного летательного аппарата
Формула / Реферат
1. Роторная система для воздушного летательного аппарата, содержащая ротор (1) с вращательной конструкцией (7, 7'), установленной с возможностью вращения вокруг оси (8) вращения и поддерживающей проксимальный конец (9) по меньшей мере одной лопасти (3) ротора, причем роторная система содержит по меньшей мере один турбореактивный двигатель (4, 4") для обеспечения подачи выхлопного газа под давлением к вращательной конструкции (7, 7'), которая имеет по меньшей мере один выход (6) реактивного сопла и по меньшей мере один канал (5, 5") для реактивного потока, предназначенный для переноса выхлопного газа под давлением от турбореактивного двигателя (4, 4") к выходу (6) реактивного сопла с обеспечением вращения вращательной конструкции (7, 7') путем выброса выхлопного газа под давлением через выход (6) сопла, при этом только вращательная конструкция (7, 7'), а не лопасть (3, 3") ротора содержит канал (5, 5") для реактивного потока и выход (6) сопла, отличающаяся тем, что вращательная конструкция (7) присоединена с возможностью вращения к несущей конструкции (20) посредством электромагнитного двигателя (51), выполненного с возможностью управления углом рыскания корпуса (31) воздушного летательного аппарата относительно вращательной конструкции (7).
2. Роторная система по п.1, в которой электромагнитный двигатель содержит по меньшей мере один постоянный магнит (18), установленный на вращательной конструкции (7), и по меньшей мере один электромагнит (19), установленный на несущей конструкции (20).
3. Роторная система по п.1, в которой электромагнитный двигатель представляет собой асинхронный двигатель индукционного типа
4. Роторная система по любому из предшествующих пунктов, в которой турбореактивный двигатель (4) представляет собой турбореактивный двигатель с радиальным потоком, расположенный коаксиально с осью (8) вращения роторной системы (1).
5. Роторная система по п.4, в которой турбореактивный двигатель (4) имеет несущую конструкцию (20), первая сторона которой с предотвращением вращения соединена с корпусом (31, 37) воздушного летательного аппарата, а противоположная, вторая сторона присоединена с возможностью вращения к реактивному диску (14) с радиальным потоком, имеющему компрессорные лопатки (11), причем на указанной второй стороне несущей конструкции (20) расположено входное отверстие (12) для впуска воздуха.
6. Роторная система по п.5, в которой реактивный диск (14) имеет турбинные лопатки (17), расположенные в плоскости каналов (5) вращательной конструкции (7).
7. Роторная система по п.5 или 6, в которой реактивный диск (14) имеет основание (14'), на котором расположены компрессорные лопатки (11), которые имеют смежную часть (11'), прикрепленную к основанию (14') диска, и дистальную часть (11"), наиболее отдаленную от основания (14') диска, причем на дистальных частях (11") компрессорных лопаток (11) расположен дисковый элемент (15), соединяющий дистальные части (11") компрессорных лопаток (11) с турбинными лопатками (17), при этом на несущей конструкции (20) расположена камера (16) сгорания.
8. Роторная система по пп.5, 6 или 7, в которой турбореактивный двигатель содержит интегрированный электромагнитный стартер (50), соединяющий реактивный диск (14) с несущей конструкцией (20).
9. Роторная система по п.8, в которой электромагнитный стартер имеет постоянные магниты (21), образующие часть реактивного диска (14), и электромагниты (22), образующие часть несущей конструкции (20).
10. Роторная система по п.8, в которой электромагнитный стартер представляет собой асинхронный двигатель индукционного типа.
11. Роторная система (1) по любому из предшествующих пунктов в комбинации с механизмом управления ориентацией, содержащим шестиногую подвеску с первым соединителем (35), присоединенным к несущей конструкции (20), и со вторым соединителем (30) для соединения с корпусом (31, 37) воздушного летательного аппарата, причем шестиногая подвеска выполнена в виде гексапода с шестью ногами (34), каждая из которых содержит растяжимый в длину привод (36).

Текст
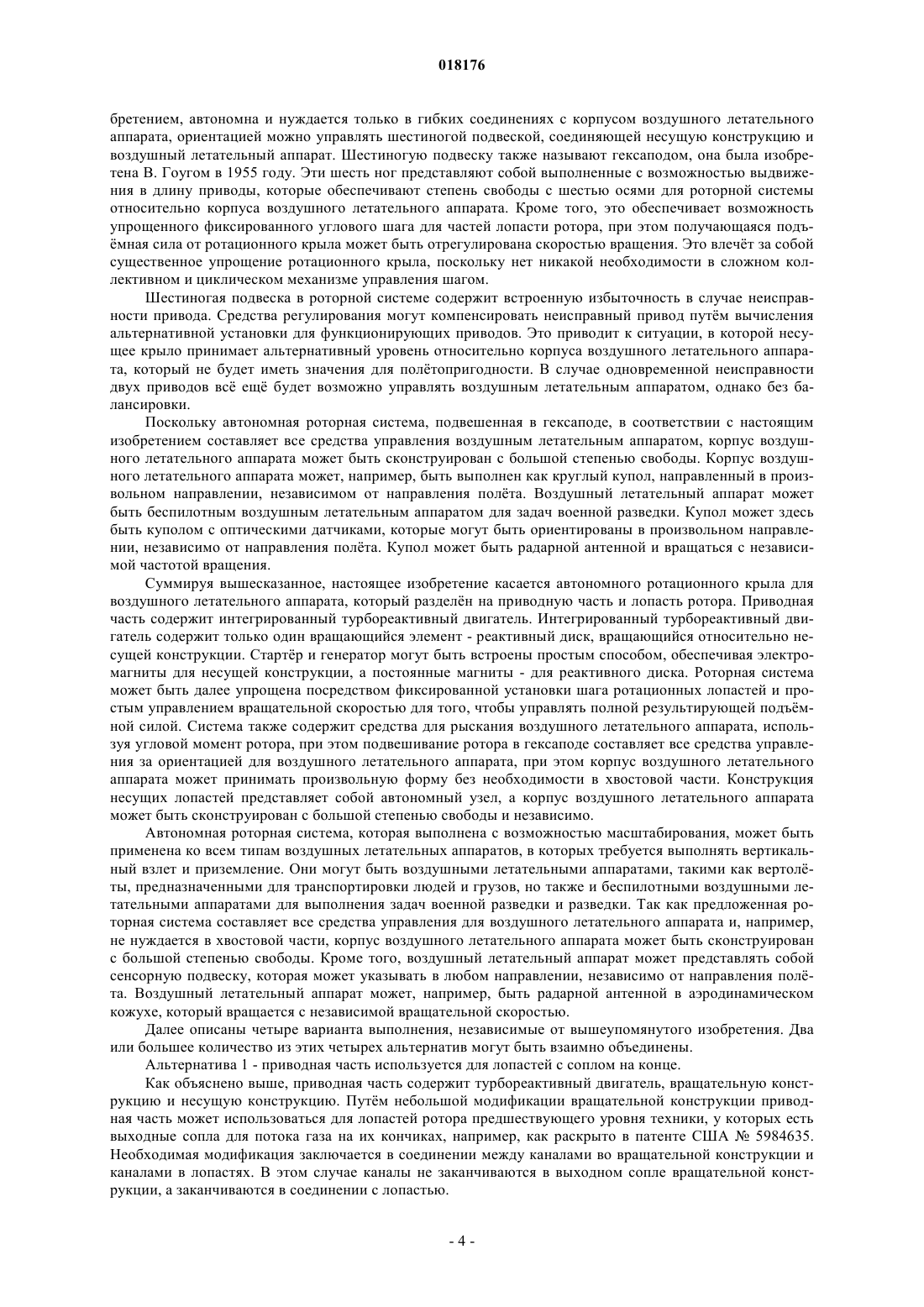
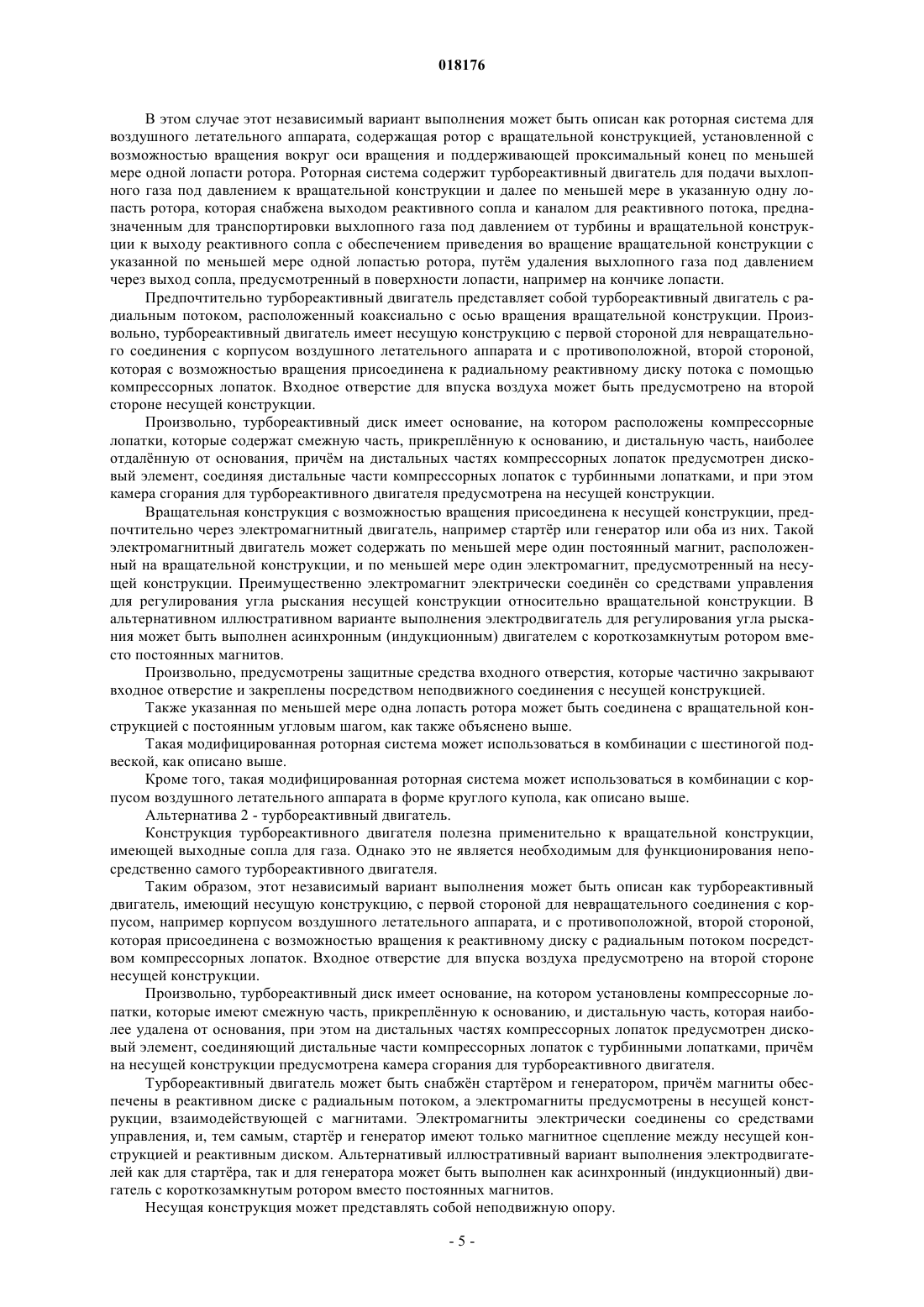
АВТОНОМНАЯ РОТОРНАЯ СИСТЕМА ДЛЯ ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА Изобретение относится к роторной системе для воздушного летательного аппарата, содержащей ротор (1) с приводной частью (2), установленной с возможностью вращения вокруг оси (8) вращения и поддерживающей проксимальный конец (9) по меньшей мере одной лопасти (3) ротора. Роторная система содержит турбореактивный двигатель (4) для обеспечения подачи выхлопного газа под давлением к вращательной конструкции (7), имеющей по меньшей мере один выход (6) реактивного сопла и по меньшей мере один канал (5) для реактивного потока,предназначенный для переноса выхлопного газа под давлением от турбореактивного двигателя (4) к выходу (6) реактивного сопла с обеспечением вращения вращательной конструкции (7) путем выброса выхлопного газа под давлением через выход (6) сопла. Кроме того, только вращательная конструкция (7), а не лопасть (3) ротора содержит канал (5) для реактивного потока и выход (6) сопла. Область изобретения Изобретение касается роторной системы для воздушного летательного аппарата, содержащей ротор с вращательной конструкцией, установленной с возможностью вращения вокруг оси вращения и поддерживающей проксимальные концы лопастей ротора. Роторная система содержит турбореактивный двигатель для подачи выхлопного газа под давлением к вращательной конструкции, имеющий по меньшей мере один выход реактивного сопла и по меньшей мере один канал для реактивного потока, предназначенный для переноса выхлопного газа под давлением от турбины к выходу реактивного сопла с обеспечением вращения вращательной конструкции путм отвода выхлопного газа под давлением через выход сопла. Предпосылки изобретения Воздушные летательные аппараты, которые могут взлетать и приземляться вертикально с вращающимся крылом, такие как вертолт, обычно имеют конструкцию с горизонтально вращающимся главным ротором и вертикально вращающимся хвостовым ротором, присоединнным к коробке передач и приводимым в действие турбореактивным двигателем. Вертикальный хвостовой ротор необходим для компенсации момента, который оказывает главный ротор на корпус воздушного летательного аппарата. Хвостовой ротор, коробка передач и их соединение имеют большой вес, который мог бы быть полезным грузом или мог бы привести к экономии энергии. Известны воздушные летательные аппараты, которые не нуждаются в хвостовом роторе и коробке передач и соединительных валах, при этом лопасти ротора приводятся в действие установленными на конце прямоточными воздушно-реактивными двигателями, которые используют высокую скорость на кончике несущего крыла. Однако оказалось, что конструкция прямоточного воздушно-реактивного двигателя является очень шумной и энергомкой и имеет недостаток, заключающийся в том, что прямоточные воздушно-реактивные двигатели создают очень яркое кольцо выхлопа. Описание другой системы,которая не нуждается в хвостовом роторе, приведено в патенте США 4702437, и в этой системе ротор имеет выходные сопла, приводимые в движение воздухом из электродвигателей, расположенных в каждой лопасти ротора, и в которой ротор соединн с фюзеляжем через систему управления рысканием, которая может вращать ось ротора относительно фюзеляжа. Описание другой системы приведено в заявке на патент Германии 2029733, в которой приведено описание вертолта с роторными крыльями, содержащими выходные сопла для газа, предназначенные для приведения в действие ротора, причм необходимый газ поставляется компрессором, приводимым в действие осью от электродвигателя. Также имеются и другие конструкции, в которых турбореактивный двигатель, установленный в корпусе воздушного летательного аппарата, создат сжатый воздух, который проводится к соплам, расположенным на конце вращающегося крыла или в центральной части ротора, как описано в патенте Франции 1424495. Однако все это требует довольно сложной технологии и сопряжено с большими потерями. В качестве альтернативы, как раскрыто в патенте США 3052305, выданного на имя Джоунса и др., описан вертолт с газовой турбиной, установленной концентрично на узле ротора и вращающейся вместе с этим узлом. Газы сгорания от двигателя выводятся наружу на кончики лопастей и выпускаются тангенциально, приводя к вращению ротора. Другая альтернатива раскрыта в патенте США 5984635,выданного на имя Келлера, где у вертолта имеется верхняя полая круглая центральная камера, проточно сообщающаяся с полыми лопастями ротора. Сжатый газ от двух реактивных двигателей, смежных с корпусом вертолта, податся к лопастям и выпускается тангенциально на кончике лопастей. Ещ одна альтернатива раскрыта в патенте Великобритании 1229577, выданном на имя Эйра, в котором вертолт снабжн цилиндрическими лопастями, имеющими выход для газа, по существу, вдоль всей длины лопастей. Газ податся из двух газовых турбин во втулке ротора выше кабины вертолта. Эта система имеет преимущество, заключающееся в лгком весе из-за отсутствия передачи и передаточных валов. Однако эта система имеет недостаток, заключающийся в том, что эти цилиндрические лопасти,контуры которых далеки от сегодняшних аэродинамических контуров лопастей, ещ не были фактически признаны безопасными во время использования. Все эти известные системы представляют собой специализированные системы, которым недостат общей универсальности и масштабируемости. Ещ одна система описана в патенте Франции 1424495, выданном на имя Гали, в котором описан вертолт с ротором, в котором выходные сопла ротора расположены ближе к центральной оси, чем внутренние концы крыльев. В выходные сопла податся воздух из турбореактивного двигателя, который расположен сзади воздушного летательного аппарата и подсоединн к ротору через систему трубок. Альтернативная система ротора описана в Европейском патентном документе 1832511, в которой ротор магнитным образом присоединн к внешнему кольцу, чтобы не использовать вращающуюся ось, обычно применяемую в вертолтах. Цель изобретения Целью изобретения является создание универсальной вертолтной роторной системы, в которой отсутствует необходимость в коробке передач и передаточных валах и которая использует универсальность аэродинамических лопастей ротора, хорошо известную из уровня техники. Описание изобретения Эта цель достигается с помощью роторной системы, которая разделена на самую внутреннюю ведущую часть и наиболее удалнную традиционную лопасть ротора. Самая внутренняя ведущая часть содержит турбореактивный двигатель, из которого реактивная струя проводится через каналы к реактивным соплам, расположенным перед началом лопасти ротора. В конструктивных деталях изобретение представляет собой роторную систему для воздушного летательного аппарата, содержащую вращательную конструкцию, установленную с возможностью вращения вокруг оси вращения и поддерживающую проксимальный конец по меньшей мере одной лопасти ротора. Роторная система также содержит турбореактивный двигатель для подачи выхлопного газа под давлением к вращательной конструкции, у которой имеется по меньшей мере один выход реактивного сопла и по меньшей мере один канал для реактивного потока, предназначенный для транспортировки выхлопного газа под давлением от турбины к выходу реактивного сопла. Выхлопной газ под давлением отводится через выход сопла из вращательной конструкции с обеспечением вращения этой конструкции. Предпочтительно отвод газа осуществляется в тангенциальном направлении относительно вращения, как и в известных системах. В отличие от вышеупомянутой известной системы, раскрытой в патенте Великобритании 1229577, выданном на имя Эйра, только вращательная конструкция, а не лопасть ротора содержит канал для реактивного потока и выход сопла. Описание радиального турбореактивного двигателя, полезного в связи с воздушными летательными аппаратами, приведено в патенте США 7062900, выданном на имя Клауса Бруна, хотя и использование этого двигателя для воздушного летательного аппарата никогда ранее не было описано. Тем самым, создана роторная система, которая представляет собой упрощнную систему, благодаря наличию отчетливого разделения приводных частей, включающих вращательную конструкцию и турбину, и одну или большее количество лопастей ротора. Отчтливое разделение технологии обеспечивает возможность раздельной разработки и производства приводной части и лопасти ротора. Для одной и той же приводной части на вращательной конструкции приводной части могут быть предусмотрены и присоединены лопасти ротора различных размеров или лопасти ротора различных типов. Таким образом,приводная часть является универсальным решением для универсальной конструкции ротора, которая может быть легко масштабирована, адаптирована и повторно использована в других конструкциях без изменения приводной части и только путм установки лопасти ротора с соответствующими размерами. Фактически, традиционные вертолтные лопасти ротора предшествующего уровня техники могут быть установлены на предлагаемой в изобретении приводной части. Приводная часть имеет вращательную конструкцию, которая удерживает проксимальный конец по меньшей мере одной лопасти ротора, а скорее группы лопастей ротора, и которая дает вращательную движущую силу лопастям ротора, чтобы получить подъмную силу воздушного летательного аппарата посредством лопастей. Предпочтительно вращательная конструкция выполнена таким образом, что она имеет минимум гидродинамического сопротивления как при вращении, так и в полте вперд, и не добавляется к подъмной силе системы или, по меньшей мере, не добавляет никакой существенной подъмной силы к системе. Расстояние от вращательной оси до проксимального конца лопасти ротора намного меньше, чем расстояние от вращательной оси до дистального конца лопастей ротора. Например, радиус вращающейся вращательной конструкции меньше чем половина или меньше чем одна треть радиуса всего ротора. Таким образом, обычно также область, покрываемая вращающимися лопастями ротора,намного больше, чем область, покрываемая вращающейся вращательной конструкцией. Кроме того, скорость дистального конца лопасти ротора намного выше, чем скорость вращательной конструкции из-за большего расстояния от оси вращения. Поэтому подъмная сила лопастей ротора является единственной или, по меньшей мере, основной причиной подъмной силы. Роторная система является автономной, и ее несущая конструкция может быть присоединена к корпусу воздушного летательного аппарата, требуя только присоединение трубок, предпочтительно гибких трубок, для топлива и электрического монтажа, в результате чего существенное сокращение веса достигается потому, что нет никакой необходимости в тяжлой коробке передач со связанными с ней передаточными валами и т.д. Кроме того, реактивная струя используется непосредственно без любого преобразования в другую форму энергии, например механическое кручение, в результате чего потери, связанные с преобразованием энергии, устраняются. Не исключительные примеры корпусов воздушного летательного аппарата в вышеупомянутом смысле представляют собой кабины для людей, беспилотные грузовые контейнеры или контейнеры с оборудованием для получения фотографий или выполнения измерений во время полта. Прежде всего, предложенная роторная система предусмотрена в виде несущего крыла для вертолтного воздушного летательного аппарата. Однако изобретение имеет общий характер и может с одинаковым успехом использоваться для пропеллеров воздушного летательного аппарата. Деля приводную часть и лопасть ротора, например, как 40% длины ротора, только 17% области подъмного диска потеряно, что может быть заменено только 9% более длинной лопастью ротора в наиболее удалнной части. По сравнению с известными системами, в которых выхлопные сопла расположены на концах лопастей, скорость реактивного сопла уменьшена, соответственно, путм размещния е ближе к вращательной оси. Это увеличивает эффективность системы, выполненной в соответствии с изобретением. Предпочтительно приводная часть содержит турбореактивный двигатель с радиальным потоком,который интегрирован в роторную систему так, что он расположен коаксиально с вращательной осью вращательной конструкции. Произвольно, реактивный диск имеет турбинные лопатки, установленные в плоскости каналов вращательной конструкции. Например, турбореактивный двигатель имеет несущую конструкцию с первой стороной для невращательного соединения с корпусом воздушного летательного аппарата и с противоположной, второй стороной, которая с возможностью вращения присоединена к реактивному диску радиальной струи с компрессорными лопатками, причм входное отверстие для впуска воздуха предусмотрено на второй стороне несущей конструкции. Приводная часть с турбореактивным двигателем содержит вращающийся реактивный диск, вращательную конструкцию и несущую конструкцию. Турбореактивный двигатель выполнен так, что камера сгорания жстко соединена с несущей конструкцией и, таким образом, непосредственно присоединена к средствам подачи топлива и управления без каких-либо сложных ротационных соединений. Это стало возможным благодаря следующей конструкции. Турбореактивный двигатель содержит вращающийся реактивный диск с основанием, на котором размещны компрессорные лопатки. Эти лопатки имеют смежную часть, прикреплнную к основанию, и дистальную часть, являющуюся отдалнной от основания. На дистальных частях компрессорных лопаток предусмотрен дисковый элемент, с помощью которого дистальные части компрессорных лопаток соединяются с турбинными лопатками. Воздух от компрессорных лопаток камеры сгорания и газ сгорания из камеры сгорания к турбинным лопаткам протекает в пространстве между основанием и дисковым элементом. Преимущественно турбореактивный двигатель может иметь интегрированный в него электромагнитный двигатель с постоянным магнитом в качестве стартра и генератора. Вращающийся реактивный диск содержит магниты, а несущая конструкция роторной системы содержит электромагниты, которые,тем самым, могут иметь непосредственное подключение к средствам управления. Стартр и генератор,тем самым, имеют только магнитное соединение между несущей конструкцией и вращающейся деталью турбореактивного двигателя, в результате чего исключаются сложные ротационные соединения. Когда роторная система используется для воздушного летательного аппарата типа вертолта, угол рыскания воздушного летательного аппарата может быть отрегулирован относительно углового момента ротора посредством интегрированного электромагнитного двигателя с постоянным магнитом. Вращательная конструкция содержит магниты, а несущая конструкция содержит электромагниты. В соответствии с изобретением электромагниты непосредственно электрически соединены со средствами управления для управления относительного перемещния между вращательной конструкцией и несущей конструкцией. Тем самым, угол рыскания воздушного летательного аппарата имеет только магнитное соединение между несущей конструкцией и ротором. Альтернативный иллюстративный вариант выполнения электродвигателей как для стартра, так и для генератора и электродвигателя для регулирования угла рыскания может быть выполнен в виде асинхронных (индукционных) двигателей с короткозамкнутым ротором, вместо постоянных магнитов. Короткозамкнутый ротор, однако, принимает дистальное положение относительно электромагнитов в заявленной конструкции. Например, может быть выгодным использовать преимущество естественной способности короткозамкнутого ротора адаптироваться к числу полюсов в статоре. Также свойства проскальзывания короткозамкнутого ротора уменьшают износ на механике при условии меньшего пикового вращательного момента. Приводная часть для ротора в соответствии с этим изобретением может иметь защитное средство для входного отверстия, например крышку, которая прикреплена к несущей конструкции системы ротационных лопастей. Прикрепление этой крышки к несущей конструкции влечт за собой ориентацию воздухозаборника крышки в направлении, определнном несущей конструкцией, например в том же самом направлении, что и направление полта воздушного летательного аппарата. Особенно при выполнении полта на высокой скорости эта крышка стабилизирует воздушный поток к входному отверстию турбореактивного двигателя. Роторная система выполнена с возможностью масштабирования более чем с одной лопастью ротора и более чем с одним турбореактивным двигателем. Пример - конфигурация с пятью лопастями ротора и с двумя турбореактивными двигателями. Два турбореактивных двигателя могут быть расположены в компенсационной конструкции, при этом конструкция из двух турбин приобретает избыточность. Управление ориентацией вертолта, например поворотом, чаще всего происходит циклическим управлением шага, где угловой шаг ротационной лопасти постоянно меняется во время движения лопасти в плоскости вращения. Поскольку роторная система, выполненная в соответствии с настоящим изо-3 018176 бретением, автономна и нуждается только в гибких соединениях с корпусом воздушного летательного аппарата, ориентацией можно управлять шестиногой подвеской, соединяющей несущую конструкцию и воздушный летательный аппарат. Шестиногую подвеску также называют гексаподом, она была изобретена В. Гоугом в 1955 году. Эти шесть ног представляют собой выполненные с возможностью выдвижения в длину приводы, которые обеспечивают степень свободы с шестью осями для роторной системы относительно корпуса воздушного летательного аппарата. Кроме того, это обеспечивает возможность упрощенного фиксированного углового шага для частей лопасти ротора, при этом получающаяся подъмная сила от ротационного крыла может быть отрегулирована скоростью вращения. Это влечт за собой существенное упрощение ротационного крыла, поскольку нет никакой необходимости в сложном коллективном и циклическом механизме управления шагом. Шестиногая подвеска в роторной системе содержит встроенную избыточность в случае неисправности привода. Средства регулирования могут компенсировать неисправный привод путм вычисления альтернативной установки для функционирующих приводов. Это приводит к ситуации, в которой несущее крыло принимает альтернативный уровень относительно корпуса воздушного летательного аппарата, который не будет иметь значения для полтопригодности. В случае одновременной неисправности двух приводов вс ещ будет возможно управлять воздушным летательным аппаратом, однако без балансировки. Поскольку автономная роторная система, подвешенная в гексаподе, в соответствии с настоящим изобретением составляет все средства управления воздушным летательным аппаратом, корпус воздушного летательного аппарата может быть сконструирован с большой степенью свободы. Корпус воздушного летательного аппарата может, например, быть выполнен как круглый купол, направленный в произвольном направлении, независимом от направления полта. Воздушный летательный аппарат может быть беспилотным воздушным летательным аппаратом для задач военной разведки. Купол может здесь быть куполом с оптическими датчиками, которые могут быть ориентированы в произвольном направлении, независимо от направления полта. Купол может быть радарной антенной и вращаться с независимой частотой вращения. Суммируя вышесказанное, настоящее изобретение касается автономного ротационного крыла для воздушного летательного аппарата, который разделн на приводную часть и лопасть ротора. Приводная часть содержит интегрированный турбореактивный двигатель. Интегрированный турбореактивный двигатель содержит только один вращающийся элемент - реактивный диск, вращающийся относительно несущей конструкции. Стартр и генератор могут быть встроены простым способом, обеспечивая электромагниты для несущей конструкции, а постоянные магниты - для реактивного диска. Роторная система может быть далее упрощена посредством фиксированной установки шага ротационных лопастей и простым управлением вращательной скоростью для того, чтобы управлять полной результирующей подъмной силой. Система также содержит средства для рыскания воздушного летательного аппарата, используя угловой момент ротора, при этом подвешивание ротора в гексаподе составляет все средства управления за ориентацией для воздушного летательного аппарата, при этом корпус воздушного летательного аппарата может принимать произвольную форму без необходимости в хвостовой части. Конструкция несущих лопастей представляет собой автономный узел, а корпус воздушного летательного аппарата может быть сконструирован с большой степенью свободы и независимо. Автономная роторная система, которая выполнена с возможностью масштабирования, может быть применена ко всем типам воздушных летательных аппаратов, в которых требуется выполнять вертикальный взлет и приземление. Они могут быть воздушными летательными аппаратами, такими как вертолты, предназначенными для транспортировки людей и грузов, но также и беспилотными воздушными летательными аппаратами для выполнения задач военной разведки и разведки. Так как предложенная роторная система составляет все средства управления для воздушного летательного аппарата и, например,не нуждается в хвостовой части, корпус воздушного летательного аппарата может быть сконструирован с большой степенью свободы. Кроме того, воздушный летательный аппарат может представлять собой сенсорную подвеску, которая может указывать в любом направлении, независимо от направления полта. Воздушный летательный аппарат может, например, быть радарной антенной в аэродинамическом кожухе, который вращается с независимой вращательной скоростью. Далее описаны четыре варианта выполнения, независимые от вышеупомянутого изобретения. Два или большее количество из этих четырех альтернатив могут быть взаимно объединены. Альтернатива 1 - приводная часть используется для лопастей с соплом на конце. Как объяснено выше, приводная часть содержит турбореактивный двигатель, вращательную конструкцию и несущую конструкцию. Путм небольшой модификации вращательной конструкции приводная часть может использоваться для лопастей ротора предшествующего уровня техники, у которых есть выходные сопла для потока газа на их кончиках, например, как раскрыто в патенте США 5984635. Необходимая модификация заключается в соединении между каналами во вращательной конструкции и каналами в лопастях. В этом случае каналы не заканчиваются в выходном сопле вращательной конструкции, а заканчиваются в соединении с лопастью. В этом случае этот независимый вариант выполнения может быть описан как роторная система для воздушного летательного аппарата, содержащая ротор с вращательной конструкцией, установленной с возможностью вращения вокруг оси вращения и поддерживающей проксимальный конец по меньшей мере одной лопасти ротора. Роторная система содержит турбореактивный двигатель для подачи выхлопного газа под давлением к вращательной конструкции и далее по меньшей мере в указанную одну лопасть ротора, которая снабжена выходом реактивного сопла и каналом для реактивного потока, предназначенным для транспортировки выхлопного газа под давлением от турбины и вращательной конструкции к выходу реактивного сопла с обеспечением приведения во вращение вращательной конструкции с указанной по меньшей мере одной лопастью ротора, путм удаления выхлопного газа под давлением через выход сопла, предусмотренный в поверхности лопасти, например на кончике лопасти. Предпочтительно турбореактивный двигатель представляет собой турбореактивный двигатель с радиальным потоком, расположенный коаксиально с осью вращения вращательной конструкции. Произвольно, турбореактивный двигатель имеет несущую конструкцию с первой стороной для невращательного соединения с корпусом воздушного летательного аппарата и с противоположной, второй стороной,которая с возможностью вращения присоединена к радиальному реактивному диску потока с помощью компрессорных лопаток. Входное отверстие для впуска воздуха может быть предусмотрено на второй стороне несущей конструкции. Произвольно, турбореактивный диск имеет основание, на котором расположены компрессорные лопатки, которые содержат смежную часть, прикреплнную к основанию, и дистальную часть, наиболее отдалнную от основания, причм на дистальных частях компрессорных лопаток предусмотрен дисковый элемент, соединяя дистальные части компрессорных лопаток с турбинными лопатками, и при этом камера сгорания для турбореактивного двигателя предусмотрена на несущей конструкции. Вращательная конструкция с возможностью вращения присоединена к несущей конструкции, предпочтительно через электромагнитный двигатель, например стартр или генератор или оба из них. Такой электромагнитный двигатель может содержать по меньшей мере один постоянный магнит, расположенный на вращательной конструкции, и по меньшей мере один электромагнит, предусмотренный на несущей конструкции. Преимущественно электромагнит электрически соединн со средствами управления для регулирования угла рыскания несущей конструкции относительно вращательной конструкции. В альтернативном иллюстративном варианте выполнения электродвигатель для регулирования угла рыскания может быть выполнен асинхронным (индукционным) двигателем с короткозамкнутым ротором вместо постоянных магнитов. Произвольно, предусмотрены защитные средства входного отверстия, которые частично закрывают входное отверстие и закреплены посредством неподвижного соединения с несущей конструкцией. Также указанная по меньшей мере одна лопасть ротора может быть соединена с вращательной конструкцией с постоянным угловым шагом, как также объяснено выше. Такая модифицированная роторная система может использоваться в комбинации с шестиногой подвеской, как описано выше. Кроме того, такая модифицированная роторная система может использоваться в комбинации с корпусом воздушного летательного аппарата в форме круглого купола, как описано выше. Альтернатива 2 - турбореактивный двигатель. Конструкция турбореактивного двигателя полезна применительно к вращательной конструкции,имеющей выходные сопла для газа. Однако это не является необходимым для функционирования непосредственно самого турбореактивного двигателя. Таким образом, этот независимый вариант выполнения может быть описан как турбореактивный двигатель, имеющий несущую конструкцию, с первой стороной для невращательного соединения с корпусом, например корпусом воздушного летательного аппарата, и с противоположной, второй стороной,которая присоединена с возможностью вращения к реактивному диску с радиальным потоком посредством компрессорных лопаток. Входное отверстие для впуска воздуха предусмотрено на второй стороне несущей конструкции. Произвольно, турбореактивный диск имеет основание, на котором установлены компрессорные лопатки, которые имеют смежную часть, прикреплнную к основанию, и дистальную часть, которая наиболее удалена от основания, при этом на дистальных частях компрессорных лопаток предусмотрен дисковый элемент, соединяющий дистальные части компрессорных лопаток с турбинными лопатками, причм на несущей конструкции предусмотрена камера сгорания для турбореактивного двигателя. Турбореактивный двигатель может быть снабжн стартром и генератором, причм магниты обеспечены в реактивном диске с радиальным потоком, а электромагниты предусмотрены в несущей конструкции, взаимодействующей с магнитами. Электромагниты электрически соединены со средствами управления, и, тем самым, стартр и генератор имеют только магнитное сцепление между несущей конструкцией и реактивным диском. Альтернативый иллюстративный вариант выполнения электродвигателей как для стартра, так и для генератора может быть выполнен как асинхронный (индукционный) двигатель с короткозамкнутым ротором вместо постоянных магнитов. Несущая конструкция может представлять собой неподвижную опору. Вращательная конструкция от воздушного летательного аппарата может быть с возможностью вращения присоединена к несущей конструкции, предпочтительно через электромагнитный двигатель. Такой электромагнитный двигатель может содержать по меньшей мере один постоянный магнит на вращательной конструкции и по меньшей мере один электромагнит на несущей конструкции. Преимущественно электромагнит электрически связан со средствами управления для регулирования угла рыскания несущей конструкции относительно вращательной конструкции. Произвольно, предусмотрены защитные средства входного отверстия, которые частично закрывают входное отверстие и закреплены посредством неподвижного соединения с несущей конструкцией. Такой турбореактивный двигатель может также быть объединн с известными вертолтными роторами, например объединн в кожухе камеры системы, раскрытой в патенте США 5984635 и соединяющей ротор с кабиной воздушного летательного аппарата. Он может также заменить турбину, как раскрыто в патенте США 3052305, или может быть интегрирован во втулку ротора, рассмотренную в патенте Великобритании 1229557. Кроме того, турбореактивный двигатель может быть использован без интеграции в воздушный летательный аппарат, а как традиционный турбореактивный двигатель, в котором преимущественно несущая конструкция, например как неподвижная деталь, предусмотрена на одной стороне вращающегося турбореактивного диска, а воздухозаборник выполнен на противоположной стороне выполненного с возможностью вращения турбореактивного диска, особенно в случаях, когда на несущей конструкции предусмотрена камера сгорания, а компрессорные лопатки соединены с турбинными лопатками через соединительный дисковый элемент. Этот турбореактивный двигатель может быть преимущественно объединн с альтернативой 1, описанной выше, или использоваться в комбинации с шестиногой подвеской, как описано выше и в альтернативе 4 ниже. Кроме того, он может использоваться в комбинации с корпусом воздушного летательного аппарата в форме круглого купола, как описано выше. Альтернатива 3 - стартр и генератор для турбореактивного двигателя. Стартр и генератор для турбореактивного двигателя, например, как описано в альтернативе 2, может также быть преимущественно использован в обычных турбореактивных двигателях, вставляя магниты в турбореактивный ротор обычного турбореактивного двигателя, например во вращающиеся компрессорные лопатки, и устанавливая электромагниты в ротационной плоскости магнитов по кругу на внешней стороне турбореактивного двигателя. Если электромагниты электрически соединены со средствами управления, стартр и генератор имеют только магнитное сцепление между неподвижными и ротационными частями турбореактивного двигателя, избегая, тем самым, сложных соединений. Альтернатива 4 -гексапод. Как раскрыто выше, управление за ориентацией с помощью механизма гексапода может также улучшить известные вертолтные системы, если он вставлен между роторной системой и вертолтной кабиной. Этот независимый вариант выполнения может быть описан как механизм управления за ориентацией, предназначенный для размещния между корпусом воздушного летательного аппарата, например кабины, и роторной системой воздушного летательного аппарата, при этом механизм управления за ориентацией содержит шестиногую подвеску с первым соединителем для соединения с роторной системой и со вторым соединителем для соединения с корпусом воздушного летательного аппарата, причм шестиногая подвеска выполнена как гексапод с шестью ногами, и каждая нога содержит выполненный с возможностью продольного раздвижения привод. Гексапод может быть объединн с одной или большим количеством из трх предшествующих альтернатив. Описание чертежей Несущее крыло в соответствии с изобретением описано ниже со ссылкой на чертежи, на которых показаны иллюстративные варианты выполнения и на которых: фиг. 1 показывает несущее крыло сверху с характерным разделением и основными элементами; фиг. 2 показывает вид в разрезе турбореактивного двигателя с радиальным потоком, расположенного коаксиально в ротационной оси ротационного крыла; фиг. 3 показывает реактивный диск с радиальным потоком; фиг. 4 показывает защитные средства для отверстия для впуска воздуха; фиг. 5 показывает пятикрылый иллюстративный вариант выполнения ротационного крыла; фиг. 6 показывает два турбореактивных двигателя в спаренной конструкции иллюстративного варианта выполнения; фиг. 7 показывает подвеску с 6 ногами (гексапод), соединяющую несущее крыло и корпус воздушного летательного аппарата с управлением ориентацией воздушного летательного аппарата; фиг. 8 показывает подвеску с 6 ногами (гексапод) на виде сверху; фиг. 9 показывает иллюстративный вариант выполнения, в котором воздушный летательный аппарат выполнен как круглый купол датчика; фиг. 10 показывает вид в разрезе роторной системы, в которой используется коммерческий стандартный турбореактивный двигатель; фиг. 11 иллюстрирует роторную систему типа пропеллера, выполненную в соответствии с изобретением. На фиг. 1 изображена роторная система на виде сверху с разделением на приводную часть 2 и лопасть 3 ротора. Приводная часть 2 содержит турбореактивный двигатель 4, из которого реактивная струя проводится во вращательную конструкцию 7 через внутренние каналы 5 для реактивного потока к выходам 6 реактивного сопла. Выходы 6 сопла выполнены так, что реактивная струя из выходов 6 действует перпендикулярно продольной оси вращательной конструкции 7 и в плоскости вращения, чтобы обеспечить наибольший эффект. Ротор 1 системы содержит вращательную конструкцию 7 и лопасти 3, которые прикреплены их проксимальными концами 9, которые противоположны их дистальным концам, к вращательной конструкции 7, и вращаются с вращательной конструкцией 7 вокруг оси 8 вращения. Фиг. 2 показывает вид в разрезе турбореактивного двигателя 4 с радиальным потоком. Приводная часть 2 роторной системы состоит, главным образом, из трх механических конструкций, которые являются несущей конструкцией 20, которая соединена с воздушным летательным аппаратом; вращательной конструкцией 7, которая вращается с лопастями 3 вокруг оси 8 и присоединена к несущей конструкции 20 через электрический двигатель 51 угла рыскания, который содержит магниты 18 и электромагниты 19; и реактивным диском 14 с радиальным потоком, который с возможностью вращения присоединн к несущей конструкции 20 через стартр/генератор электродвигателя 50, имеющий магниты 21 и электромагниты 22. Несущая конструкция 20 содержит основание 20' турбореактивного двигателя 4. Воздух проводится в реактивный диск 14 через входное отверстие 12 к компрессорным лопаткам 11 и вперд через камеру 16 сгорания к турбинным лопаткам 17, откуда реактивный поток проводится через каналы 5 к выходам 6 реактивного сопла. Камера 16 сгорания содержит систему диффузоров и систему направляющих лопаток для выхлопа. Отличительная конструкция турбореактивного диска 14 видна на фиг. 2. Турбореактивный диск 14 имеет основание 14', на котором выполнены компрессорные лопатки 11. Лопатки 11 имеют смежную часть 11', прикреплнную к основанию 14' диска, и дистальную часть 11", которая наиболее удалена от основания 14' диска. На дистальных частях 11" лопаток 11 предусмотрен дисковый элемент 15, соединяющий дистальные части 11" лопаток 11 с турбинными лопатками 17. Воздух от компрессорных лопаток 11 к камере 16 сгорания и газ сгорания от камеры 16 сгорания к турбинным лопаткам 17 протекает в пространстве между основанием 14' и дисковым элементом 15. Эта конструкция преимущественно обеспечивает то, что камера 16 сгорания прочно установлена на несущей конструкции 20, так что топливоснабжение 25, электрические соединения 24 и средства 23 управления не обязательно должны проходить через ротационное соединение к воздушному летательному аппарату. Турбореактивный двигатель 4 в соответствии с изобретением имеет интегрированный стартр и генератор, содержащий электродвигатель/генератор 50 с постоянными магнитами, который содержит магниты 21 и электромагниты 22. Вращающийся диск 14 содержит магниты 21,а несущая конструкция 20 содержит электромагниты 22, электрически соединнные со средствами 23 управления. Предложенная роторная система может управлять углом рыскания воздушного летательного аппарата посредством интегрированного электродвигателя 51 с постоянными магнитами. Вращательная конструкция 7 содержит магниты 18, а неподвижная несущая конструкция 20 содержит электромагниты 19,электрически соединнные со средствами 23 управления. Поскольку радиально направленный выхлопной газ под давлением, удаляемый из турбореактивного двигателя 4 через выходы 6, вызывает вращение вращательной конструкции 7 с лопастями 2, на несущую конструкцию 20 не оказывается никакая существенная вращательная противодействующая сила. Таким образом, в отличие от традиционных вертолтов, в этой конструкции не нужен хвостовой ротор. Вращательное регулирование кабины вертолта относительно земли (угла рыскания) достигается путм ускорения или замедления вращения между электромагнитом 19 несущей конструкции 20 и магнитом 18 вращательной конструкции 7. Фиг. 3 показывает иллюстративный вариант выполнения турбореактивного диска 14 радиальным потоком, если смотреть от входного отверстия. Компрессорные лопатки 11 и соединительный диск 15 соединяют дистальную часть 11 лопаток 11 с турбинными лопатками 17. Фиг. 4 показывает иллюстративный вариант выполнения с защитными средствами 26 отверстия для впуска воздуха, выполненными в форме крышки, где средства 26 прикреплены 27 к несущей конструкции 20. Таким образом, вращательная конструкция 7 и реактивный диск 14 вращаются относительно крышки 26. Стрелка 28 показывает направление полта. Фиг. 5 показывает иллюстративный вариант выполнения с ротационным крылом в конфигурации с пятью крыльями вращательной конструкции 7' и с турбореактивным двигателем 4, расположенным коаксиально на вращательной оси вращательной конструкции 7'. Фиг. 6 показывает иллюстративный вариант выполнения турбореактивных двигателей, расположенных в спаренной конструкции со второй турбиной 4', расположенной коаксиально на вращательной оси 8 вращательной конструкции 7, которая имеет два канала 5, 5'. Тогда как первая турбина имеет первое входное отверстие 12, вторая турбина 4' имеет второе входное отверстие 12 во встречном направлении. Вторая турбина 4' направляет выхлопные газы во второй внутренний канал 5' к выходам сопла. Фиг. 7 показывает иллюстративный вариант выполнения воздушного летательного аппарата 31 с роторной системой, выполненной в соответствии с изобретением. Ротационные лопасти 3 прикреплены с фиксированным угловым шагом к вращательной конструкции 7 приводной части 2. Результирующая подъмная сила 29 от приводной части 2 в комбинации с лопастями 3 регулируется вращательной скоростью вращательной конструкции 7. Это в корне отличается от традиционных вертолтов, в которых результирующая сила регулируется коллективным и циклическим угловым шагом. Ориентация воздушного летательного аппарата 31 управляется подвеской 34 с 6 ногами, где шестиножная подвеска 34 выполнена в виде гексапода, соединяющего несущую конструкцию 20 роторной системы и корпус 31 воздушного летательного аппарата. Таким образом, эти шесть ног присоединены к приводной части 2 в трх точках и к корпусу 31 в трх точках таким образом, что у каждых двух смежных ног имеется одна общая точка соединения в одном их конце и две различные точки соединения в их противоположных концах. Эти шесть ног 34 представляют собой растяжимые в длину приводы, причм к корпусу 31 воздушного летательного аппарата прикреплн координатный треугольник 30, а выполненный с возможностью свободного перемещния треугольник 35 с 6 осями, показанный более подробно на фиг. 8, прикреплн к несущей конструкции 20 приводной части 2. Ситуация на фиг. 7 состоит в том, что центр тяжести 32 корпуса воздушного летательного аппарата смещн относительно вертикальной центральной линии 33 корпуса 31 воздушного летательного аппарата и что подвеска 34 воздушного летательного аппарата смещает систему 1 в сторону к положению, находящемуся непосредственно выше центра тяжести 32, посредством чего воздушный летательный аппарат сбалансирован. Фиг. 8 показывает ситуацию, изображенную на фиг. 7, на виде сверху с выполненным с возможностью свободного перемещния треугольником 35 с 6 осями, смещнным относительно координатного треугольника 30 посредством шести растяжимых в длину приводов 36. Фиг. 9 показывает несущее крыло, установленное на воздушном летательном аппарате, выполненном как круглый купол 37 датчика, причм купол 37 может быть направлен вершиной в произвольном направлении, независимо от направления полта. Кроме того, купол 37 может вращаться горизонтально вокруг центра тяжести купола 37 с независимой скоростью вращения. Фиг. 10 показывает вид в разрезе иллюстративного варианта выполнения роторной системы, использующей коммерческий стандартный турбореактивный двигатель 44, причм несущая конструкция 42 вмещает турбореактивный двигатель 44 и с возможностью вращения присоединена к приспособленной вращательной конструкции 7" посредством основного подшипника 43 ротационного крыла. Вращательная конструкция 7" вращается вокруг оси 8 вращения. В этом иллюстративном варианте выполнения турбореактивный двигатель имеет отверстие 38 для впуска воздуха, обращнное к воздушному летательному аппарату, и каналы 5" для реактивного потока, снабжающие выходы 6 реактивного сопла выхлопным газом под давлением. Выхлопной газ под давлением из турбореактивного двигателя 44 соединяется с вращательной конструкцией 7" посредством лабиринтной прокладки 41 (см. увеличенное изображение), чтобы сделать вращательную конструкцию 7" свободно вращающейся на несущей конструкции 42. Турбореактивный двигатель 44, помещнный в несущую конструкцию 42, обеспечивает преимущество,заключающееся в том, что топливоснабжение 25 и электрические соединения 24 не обязательно должны проходить через ротационное соединение с воздушным летательным аппаратом. Кроме того, система угла рыскания также выполнена с помощью коммерческого обычного электромагнитного двигателя 47,соединнного с конструкцией 7" посредством ременного привода 48. Фиг. 11 иллюстрирует роторную систему 53 пропеллерного типа для воздушных летательных аппаратов турбовинтового типа. Принцип соответствует принципу ротора, как показано на фиг. 5. Однако ось вращения расположена горизонтально, а не вертикально. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Роторная система для воздушного летательного аппарата, содержащая ротор (1) с вращательной конструкцией (7, 7'), установленной с возможностью вращения вокруг оси (8) вращения и поддерживающей проксимальный конец (9) по меньшей мере одной лопасти (3) ротора, причм роторная система содержит по меньшей мере один турбореактивный двигатель (4, 4") для обеспечения подачи выхлопного газа под давлением к вращательной конструкции (7, 7'), которая имеет по меньшей мере один выход (6) реактивного сопла и по меньшей мере один канал (5, 5") для реактивного потока, предназначенный для переноса выхлопного газа под давлением от турбореактивного двигателя (4, 4") к выходу (6) реактивного сопла с обеспечением вращения вращательной конструкции (7, 7') путм выброса выхлопного газа под давлением через выход (6) сопла, при этом только вращательная конструкция (7, 7'), а не лопасть (3, 3") ротора содержит канал (5, 5") для реактивного потока и выход (6) сопла, отличающаяся тем, что вращательная конструкция (7) присоединена с возможностью вращения к несущей конструкции (20) посредством электромагнитного двигателя (51), выполненного с возможностью управления углом рыскания корпуса (31) воздушного летательного аппарата относительно вращательной конструкции (7). 2. Роторная система по п.1, в которой электромагнитный двигатель содержит по меньшей мере один постоянный магнит (18), установленный на вращательной конструкции (7), и по меньшей мере один электромагнит (19), установленный на несущей конструкции (20). 3. Роторная система по п.1, в которой электромагнитный двигатель представляет собой асинхронный двигатель индукционного типа. 4. Роторная система по любому из предшествующих пунктов, в которой турбореактивный двигатель (4) представляет собой турбореактивный двигатель с радиальным потоком, расположенный коаксиально с осью (8) вращения роторной системы (1). 5. Роторная система по п.4, в которой турбореактивный двигатель (4) имеет несущую конструкцию(20), первая сторона которой с предотвращением вращения соединена с корпусом (31, 37) воздушного летательного аппарата, а противоположная, вторая сторона присоединена с возможностью вращения к реактивному диску (14) с радиальным потоком, имеющему компрессорные лопатки (11), причм на указанной второй стороне несущей конструкции (20) расположено входное отверстие (12) для впуска воздуха. 6. Роторная система по п.5, в которой реактивный диск (14) имеет турбинные лопатки (17), расположенные в плоскости каналов (5) вращательной конструкции (7). 7. Роторная система по п.5 или 6, в которой реактивный диск (14) имеет основание (14'), на котором расположены компрессорные лопатки (11), которые имеют смежную часть (11'), прикреплнную к основанию (14') диска, и дистальную часть (11"), наиболее отдалнную от основания (14') диска, причм на дистальных частях (11") компрессорных лопаток (11) расположен дисковый элемент (15), соединяющий дистальные части (11") компрессорных лопаток (11) с турбинными лопатками (17), при этом на несущей конструкции (20) расположена камера (16) сгорания. 8. Роторная система по пп.5, 6 или 7, в которой турбореактивный двигатель содержит интегрированный электромагнитный стартр (50), соединяющий реактивный диск (14) с несущей конструкцией(20). 9. Роторная система по п.8, в которой электромагнитный стартр имеет постоянные магниты (21),образующие часть реактивного диска (14), и электромагниты (22), образующие часть несущей конструкции (20). 10. Роторная система по п.8, в которой электромагнитный стартр представляет собой асинхронный двигатель индукционного типа. 11. Роторная система (1) по любому из предшествующих пунктов в комбинации с механизмом управления ориентацией, содержащим шестиногую подвеску с первым соединителем (35), присоединнным к несущей конструкции (20), и со вторым соединителем (30) для соединения с корпусом (31, 37) воздушного летательного аппарата, причм шестиногая подвеска выполнена в виде гексапода с шестью ногами (34), каждая из которых содержит растяжимый в длину привод (36).
МПК / Метки
МПК: B64C 27/52, B64C 27/18
Метки: летательного, система, воздушного, роторная, автономная, аппарата
Код ссылки
<a href="https://eas.patents.su/13-18176-avtonomnaya-rotornaya-sistema-dlya-vozdushnogo-letatelnogo-apparata.html" rel="bookmark" title="База патентов Евразийского Союза">Автономная роторная система для воздушного летательного аппарата</a>
Система руления летательного аппарата
Номер патента: 18165
Опубликовано: 30.05.2013
Автор: Бхаргава Бридж Б.
МПК: B64D 27/20
Метки: аппарата, система, летательного, руления
Формула / Реферат:
1. Тяговая система для летательного аппарата, имеющего хвостовую часть, содержащаяодин или более маршевых двигателей, расположенных на упомянутом летательном аппарате, причем каждый из упомянутых маршевых двигателей имеет взлетную тягу, соответствующую максимальной расчетной тяге, меньшую крейсерскую тягу и тягу на малом газе, которая равна или меньше крейсерской тяги, причем все маршевые двигатели вместе обеспечивают объединенную расчетную...
Система крепления передней кромки к конструкции несущей поверхности летательного аппарата
Номер патента: 11334
Опубликовано: 27.02.2009
Авторы: Бальестеро-Мендес Хорхе, Перес-Родригес Давид
МПК: B64C 21/06, B64C 3/28
Метки: конструкции, кромки, крепления, летательного, система, поверхности, несущей, передней, аппарата
Формула / Реферат:
1. Система крепления сборной передней кромки к конструкции несущей поверхности летательного аппарата, причем передняя кромка (2) включает обшивку (4), состоящую из первой пластины (5) и второй пластины (6), между которыми образована герметизированная внутренняя полость, разделенная на несколько камер (7) всасывания, и плоское ребро (21), имеющее юбку (19), посредством которой оно прикреплено к обшивке (4), отличающаяся тем, что она содержит...
Устройство, система и способ обеспечения безопасности летательного аппарата

Номер патента: 9112
Опубликовано: 26.10.2007
Автор: Арнуз Майкл
МПК: G08B 29/00
Метки: устройство, обеспечения, система, аппарата, безопасности, способ, летательного
Формула / Реферат:
1. Механизм обеспечения безопасности для идентификации уполномоченных пользователей, включающий орган управления, управляемый пользователем; одно или более устройство обеспечения безопасности для идентификации пользователя, пытающегося управлять органом управления; и одно или более устройство контроля для определения, уполномочен ли идентифицированный пользователь управлять органом управления, при этом указанные устройства контроля заранее...
Интегрированная система вихревой безопасности летательного аппарата
Номер патента: 8093
Опубликовано: 27.02.2007
Авторы: Белоцерковский Андрей Сергеевич, Баранов Николай Алексеевич, Пасекунов Игорь Владимирович, Каневский Михаил Игоревич
МПК: G01C 23/00, G01S 13/93, G01S 17/93...
Метки: вихревой, аппарата, система, безопасности, летательного, интегрированная
Формула / Реферат:
1. Интегрированная система вихревой безопасности летательного аппарата, включающая подсистему (1) информации о летательном аппарате, способную фиксировать, сохранять и предоставлять пользователям информацию о конфигурации, положении, скорости перемещения и ориентации летательного аппарата в пространстве; подсистему (2) информации о генераторах вихревого следа, способную фиксировать, сохранять и предоставлять пользователям информацию о типе,...
Система и способ обеспечения безопасности летательного аппарата и предотвращения его захвата
Номер патента: 9538
Опубликовано: 28.02.2008
Автор: Арнуз Майкл
МПК: G06K 9/00
Метки: способ, захвата, предотвращения, аппарата, безопасности, система, обеспечения, летательного
Формула / Реферат:
1. Способ управления летательным аппаратом, включающий ввод информации о плане полета в систему контроля; вычисление допусков отклонения, относящихся к плану полета; управление летательным аппаратом согласно плану полета; отклонение от плана полета в случае необходимости изменения плана полета, при этом в случае отклонения от плана полета оценивают, имеет ли место возможная враждебная ситуация, путем определения, находится ли отклонение от плана...
Предыдущий патент: Водные микроэмульсии, содержащие органические инсектицидные соединения
Следующий патент: Прижимной ролик
Случайный патент: Способ гидродинамической очистки загрязненного нефтью и/или нефтепродуктами грунта