Система руления летательного аппарата
Формула / Реферат
1. Тяговая система для летательного аппарата, имеющего хвостовую часть, содержащая
один или более маршевых двигателей, расположенных на упомянутом летательном аппарате, причем каждый из упомянутых маршевых двигателей имеет взлетную тягу, соответствующую максимальной расчетной тяге, меньшую крейсерскую тягу и тягу на малом газе, которая равна или меньше крейсерской тяги, причем все маршевые двигатели вместе обеспечивают объединенную расчетную тягу, достаточную для взлета, упомянутые двигатели выполнены с возможностью направлять упомянутую взлетную тягу в направлении взлетной тяги;
рулежный двигатель, размещенный в фюзеляже в упомянутой хвостовой части, причем рулежный двигатель имеет максимальную расчетную тягу, соответствующую максимальной рулежной тяге, упомянутая максимальная рулежная тяга меньше, чем упомянутая тяга на малом газе или крейсерская тяга и не превышает 15% упомянутой объединенной взлетной тяги, обеспечиваемой маршевыми двигателями, и выполненный с возможностью направлять упомянутую рулежную тягу в направлении рулежной тяги, которое является, по существу, таким же, как упомянутое направление взлетной тяги,
причем упомянутый рулежный двигатель не используется для обеспечения тяги для летательного аппарата при взлете или в полете; а упомянутая максимальная рулежная тяга составляет менее 33% расчетной тяги одного из одного или более маршевых двигателей; упомянутая рулежная тяга, в силу этого, достаточна для руления упомянутого летательного аппарата по рулежной дорожке.
2. Система по п.1, в которой упомянутая рулежная тяга не превышает 7,5% упомянутой объединенной взлетной тяги.
3. Система по п.1, в которой все из упомянутых маршевых двигателей имеют в совокупности вес маршевых двигателей, а упомянутый рулежный двигатель сконфигурирован с весом рулежного двигателя, который не превышает 10% упомянутого веса маршевых двигателей.
4. Система по п.3, в которой упомянутый вес рулежного двигателя не превышает 7,0% упомянутого веса маршевых двигателей.
5. Система по п.3, в которой упомянутый рулежный двигатель дополнительно сконфигурирован, чтобы иметь рулежную тягу между 40 и 100% упомянутой максимальной рулежной тяги, так что коэффициент полезного действия рулежного двигателя приблизительно равняется его максимальному коэффициенту полезного действия.
6. Система по п.5, в которой упомянутый вес рулежного двигателя не превышает 10% упомянутого веса маршевых двигателей.
7. Система по п.1, в которой упомянутый рулежный двигатель включает в себя поворотную часть двигателя, чтобы отклонять упомянутую рулежную тягу по азимутальному углу для содействия рулению упомянутого летательного аппарата по упомянутой рулежной дорожке.
8. Система по п.7, в которой упомянутая поворотная часть двигателя является поворотным направляющим аппаратом, а упомянутый азимутальный угол равен по меньшей мере 10°.
9. Способ руления летательного аппарата, который несет один или более маршевых двигателей, причем каждый имеет максимальную расчетную тягу, при этом все маршевые двигатели вместе обеспечивают общую расчетную тягу, достаточную для взлета в направлении взлетной тяги, и рулежный двигатель, имеющий максимальную расчетную тягу, которая меньше 15% упомянутой общей расчетной тяги одного или более маршевых двигателей, причем упомянутый рулежный двигатель расположен в хвосте летательного аппарата, способ содержит этапы, на которых направляют тягу рулежного двигателя в направлении рулежной тяги, которое является, по существу, таким же, как упомянутое направление полетной тяги, чтобы тем самым осуществлять руление упомянутого летательного аппарата по рулежной дорожке, причем тяга рулежного двигателя не используется для обеспечения тяги при взлете и в полете, при этом максимальная расчетная тяга рулежного двигателя составляет менее 33% расчетной тяги одного или более маршевых двигателей.
10. Способ по п.9, в котором упомянутый этап обеспечения включает в себя этап, на котором ограничивают упомянутую рулежную тягу до 7,5% упомянутой объединенной полетной тяги.
11. Способ по п.9, в котором все из упомянутых маршевых двигателей имеют, в совокупности, вес маршевых двигателей и дополнительно включает в себя этап, на котором ограничивают вес рулежного двигателя упомянутого рулежного двигателя до 10% упомянутого веса маршевых двигателей.
12. Способ по п.11, в котором упомянутый этап ограничения включает в себя этап, на котором дополнительно ограничивают упомянутый вес рулежного двигателя до 7,0% упомянутого веса маршевых двигателей.
13. Способ по п.11, дополнительно включающий в себя этап, на котором конфигурируют упомянутый рулежный двигатель, чтобы он имел рулежную тягу между 40 и 100% упомянутой расчетной тяги рулежного двигателя.
14. Способ по п.13, в котором упомянутый вес рулежного двигателя составляет до 10% упомянутого веса маршевых двигателей.
15. Летательный аппарат, который включает в себя рулежную систему и по меньшей мере один маршевый двигатель, имеющий максимальную расчетную тягу, причем все маршевые двигатели вместе обеспечивают общую расчетную тягу, достаточную для взлета в направлении взлетной тяги, причем каждый из упомянутого по меньшей мере одного маршевого двигателя имеет минимальную тягу для эффективной работы при 33% от упомянутой максимальной расчетной тяги, упомянутая рулежная система содержит рулежный двигатель на упомянутом летательном аппарате, имеющий максимальную расчетную тягу, соответствующую максимальной рулежной тяге, которая не превышает 15% общей расчетной тяги маршевых двигателей, и выполненный с возможностью направлять упомянутую рулежную тягу в направлении рулежной тяги, которое является, по существу, таким же, как упомянутое направление взлетной тяги; упомянутая максимальная рулежная тяга меньше, чем упомянутая минимальная тяга для эффективной работы маршевого двигателя и обеспечивает начальную тягу, достаточную для руления упомянутого летательного аппарата по рулежной дорожке.
16. Летательный аппарат по п.15, в котором упомянутая рулежная тяга не превышает 7,5% упомянутой общей расчетной тяги.
17. Летательный аппарат по п.15, в котором все из упомянутых маршевых двигателей имеют, в совокупности, вес маршевых двигателей, а упомянутый рулежный двигатель сконфигурирован с весом рулежного двигателя, который не превышает 10% упомянутого веса маршевых двигателей.
18. Летательный аппарат по п.17, в котором упомянутый вес рулежного двигателя не превышает 7,0% упомянутого веса маршевых двигателей.
19. Летательный аппарат по п.15, в котором упомянутый рулежный двигатель дополнительно сконфигурирован, чтобы обеспечивать рулежную тягу между 40 и 100% упомянутой максимальной рулежной тяги, так что коэффициент полезного действия рулежного двигателя приблизительно равен его максимальному коэффициенту полезного действия.
20. Летательный аппарат по п.19, в котором
упомянутая рулежная тяга не превышает 15% упомянутой общей расчетной тяги;
упомянутый вес рулежного двигателя не превышает 10% общего веса маршевых двигателей всех упомянутых маршевых двигателей.
21. Способ по п.9, в котором рулежный двигатель обеспечивает движение по земле летательного аппарата без использования маршевых двигателей.
22. Летательный аппарат по п.15, в котором тяга рулежного двигателя меньше чем приблизительно 3000 фунтов или меньше чем 15% взлетной тяги.
23. Летательный аппарат по п.15, в котором каждый маршевый двигатель имеет расчетную тягу по меньшей мере приблизительно 20000 фунтов, а рулежный двигатель имеет тягу страгивания менее чем приблизительно 3000 фунтов, упомянутый рулежный двигатель работает эффективно до тяги приблизительно 1200 фунтов.

Текст
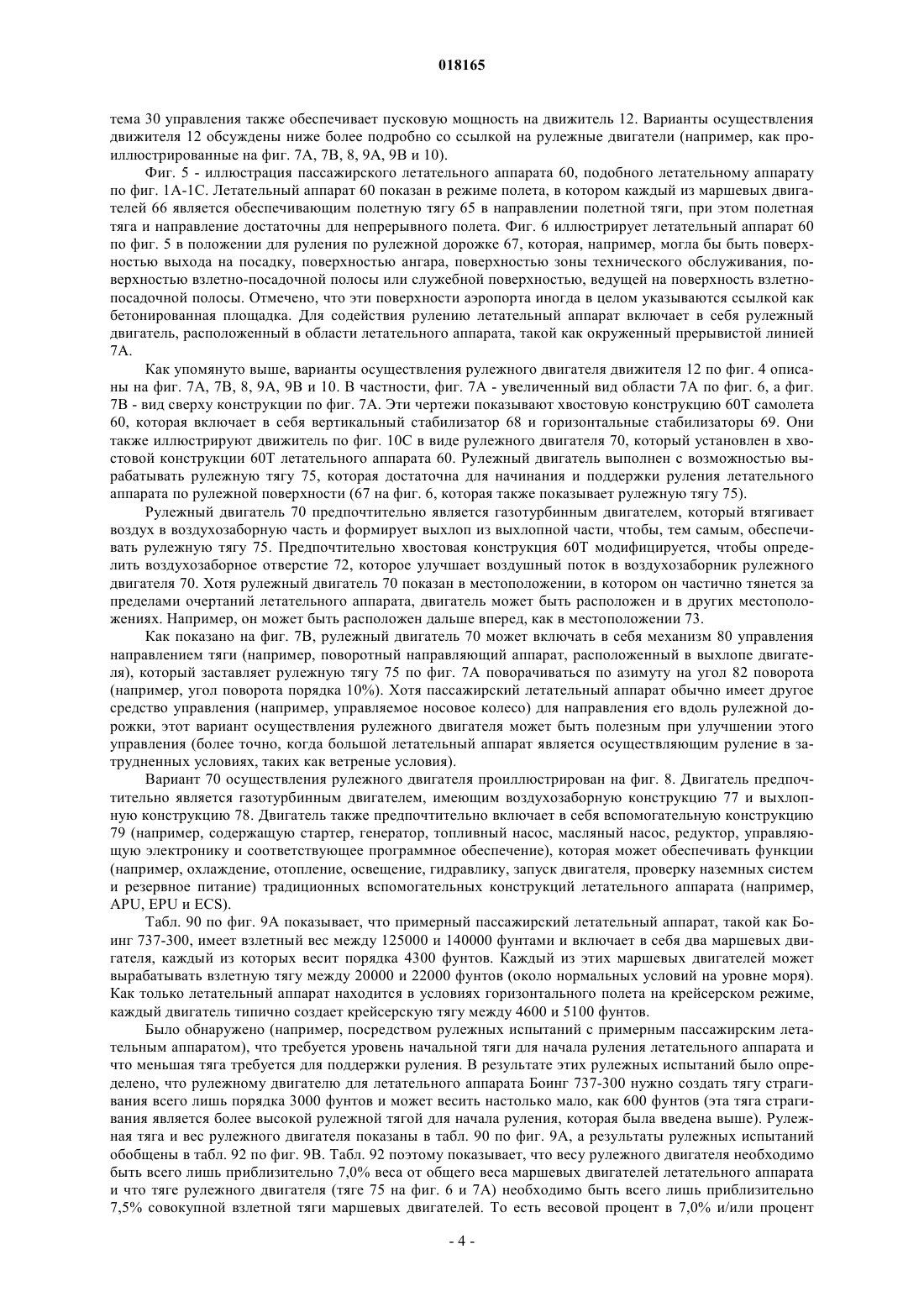
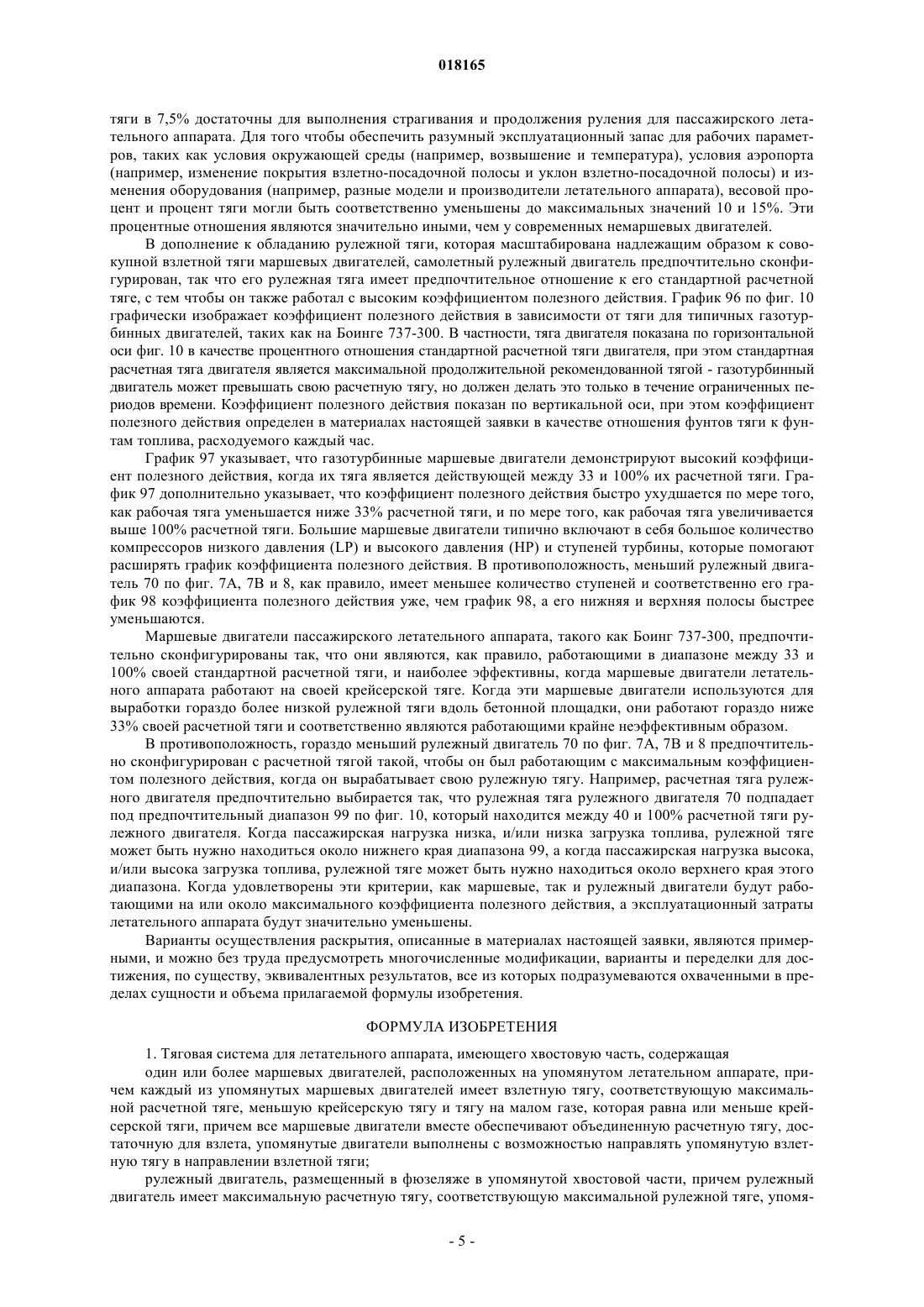
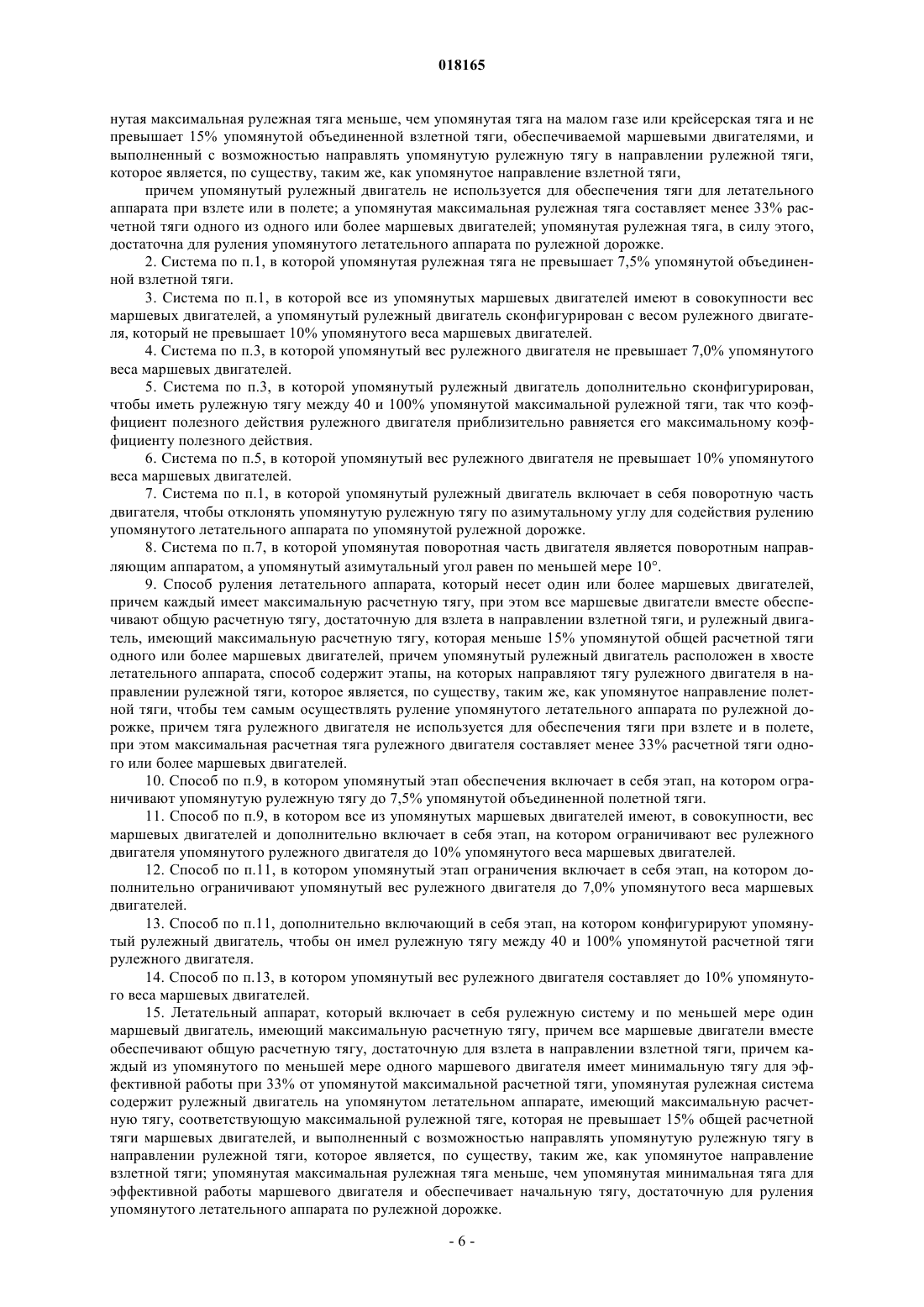
СИСТЕМА РУЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В изобретении тяговые системы для пассажирского летательного аппарата предусматривают по меньшей мере один маршевый двигатель (66) и рулежный двигатель (70), при этом все маршевые двигатели вместе, в совокупности, обеспечивают взлетную тягу (65), организованную в направлении взлетной тяги, а рулежный двигатель обеспечивает рулежную тягу (75), которая не превышает 15% взлетной тяги и направлена, по существу, так же, как направление взлетной тяги. Рулежная тяга, в силу этого, достаточна для руления летательным аппаратом по рулежной дорожке. В варианте осуществления системы рулежная тяга не превышает 7,5% полетной тяги. В еще одном варианте осуществления системы маршевые двигатели имеют, в совокупности,вес маршевых двигателей, а рулежный двигатель имеет вес рулежного двигателя, который не превышает 10% веса маршевых двигателей. В варианте осуществления системы вес рулежного двигателя не превышает 7,0% веса маршевых двигателей. В еще одном варианте осуществления системы рулежный двигатель имеет номинальную тягу и сконфигурирован так, что рулежная тяга находится в пределах от 40 до 100% номинальной тяги. В еще одном варианте осуществления системы рулежный двигатель включает в себя поворотную часть (80) двигателя, чтобы отклонять рулежную тягу по азимутальному углу (82) для содействия рулению по рулежной дорожке. Перекрестные ссылки на родственные заявки Эта заявка является частичным продолжением заявки под порядковым 11/683711, поданной 8 марта 2007 года. Уровень техники изобретения Область техники, к которой относится изобретение Настоящее раскрытие в целом относится к пассажирскому летательному аппарату, а более точно, к рулению летательного аппарата. Описание предшествующего уровня техники В современном пассажирском летательном аппарате крайне важны вес, пространство и затраты. Известно, что вплоть до 15% затрат на эксплуатацию пассажирского летательного аппарата типично тратится, в то время как летательный аппарат находится на земле. Значительная часть этих затрат направлена на руление между местоположениями аэропорта (например, выходом на посадку, ангаром, зонами технического обслуживания и взлетно-посадочной полосой) за счет энергии, поставляемой маршевыми двигателями летательного аппарата. Когда маршевые двигатели используются для руления, они работают в очень неэффективной зоне своей расчетной тяги и соответственно расходуют значительные фунты топлива за каждую минуту, проведенную в этом рабочем режиме. Результирующие затраты на топливо могут быть особенно существенными в оживленных аэропортах, где летательный аппарат часто проводит длительные промежутки времени между выходом на посадку и взлетно-посадочными полосами, с работающим маршевым двигателем(ями). В дополнение, несутся значительные затраты на техническое обслуживание тормозной системы. Когда маршевые двигатели используются для руления, тормозная система должна часто вовлекаться,чтобы противодействовать сильной тяге этих двигателей. Это значительно увеличивает частоту ремонта и регулировки тормозов. Многие пассажирские летательные аппараты также включают в себя силовые системы, которые обеспечивают некоторое количество наземных функций (например, охлаждение, отопление, освещение,гидравлика, запуск двигателя, проверка наземных систем и резервное питание). Эти дополнительные системы часто относятся к вспомогательным силовым установкам и резервным силовым установкам. Так как они добавляют вес летательному аппарату, в то время как он в полете, они являются еще одним источником дополнительных затрат. Любое уменьшение деталей, веса и сложности в системах летательного аппарата крайне желательно. Надежность и ремонтопригодность систем также являются важными вопросами, поскольку они оказывают влияние на эксплуатационную готовность летательного аппарата и его общие затраты. Краткая сущность изобретения Настоящее раскрытие в целом направлено на системы руления летательного аппарата. Чертежи и последующее описание дают достаточное для воспроизведения раскрытие, а приложенная формула изобретения конкретно указывает и четко заявляет объект изобретения и его эквиваленты. Краткое описание чертежей Фиг. 1 А, 1 В и 1 С - виды спереди, снизу и сбоку примерного пассажирского летательного аппарата; фиг. 2 и 3 - структурные схемы вариантов осуществления системы руления, которые могут быть присоединены к колесу шасси летательного аппарата по фиг. 1 А-1 С; фиг. 4 - структурная схема еще одного варианта осуществления системы руления для летательного аппарата по фиг. 1 А-1 С; фиг. 5 - вид в перспективе летательного аппарата, подобного таковому по фиг. 1 А-1 С, когда летательный аппарат в полете; фиг. 6 - вид сбоку летательного аппарата по фиг. 5, который показывает его в положении для руления по рулежной поверхности; фиг. 7 А - увеличенное изображение конструкции в пределах кривой линии 7 А по фиг. 6; фиг. 7 В - вид сверху изображения по фиг. 7 А; фиг. 8 - вид в перспективе варианта осуществления рулежного двигателя на фиг. 7 А и 7 В; фиг. 9 А и 9 В - графики, которые включают в себя примерные параметры для маршевых и рулежных двигателей; и фиг. 10 - график, который иллюстрирует коэффициент полезного действия двигателя в зависимости от расчетной тяги. Подробное описание изобретения Системы руления летательного аппарата по настоящему раскрытию дают существенные преимущества владельцу летательного аппарата, например, в виде уменьшенного расхода топлива, сниженных выбросов, более низких уровней шума, меньшего объема технического обслуживания и ремонта, и меньшего износа (а соответственно более длительного срока службы) маршевого(ых) двигателя(ей). Также имеет место меньший износ и более продолжительный срок службы тормозов летательного аппарата, поскольку они не должны оказывать сопротивление высокой тяге маршевых двигателей. Эти системы руления невелики по размеру и весу, высоконадежны и низкозатратны. Они требуют минимальных изменений в отношении существующих систем летательного аппарата, применимы для выработки электроэнергии на земле и во время полета (являясь более чем просто дополнительным мертвым грузом) и могут быть без труда интегрированы с существующими системами летательного аппарата. В дополнение, они делают существование бортовых вспомогательных силовых систем необязательным или избыточным. Эти системы руления, как правило, реализуются небольшими газотурбинными двигателями, которые сконфигурированы для работы на уровне тяги, который высокоэффективен, так как этот уровень имеет предпочтительное отношение к их стандартной расчетной тяге. Это происходит в отличие от летательного аппарата, который в настоящее время использует свои маршевые двигатели для целей руления. Маршевые двигатели, в таком случае, являются работающими в диапазоне гораздо ниже 33% своей расчетной тяги, так что они работают весьма неэффективным образом. Даже на или около своей частоты вращения холостого хода, маршевые двигатели вырабатывают гораздо большую тягу, чем требуемая для руления. В противоположность, рулежные двигатели раскрываемых систем руления специально предназначены для работы при эффективном коэффициенте своей расчетной тяги, чтобы тем самым уменьшать расход топлива и эксплуатационные затраты. В критическом аварийном состоянии (например, когда маршевые двигатели летательного аппарата выходят из строя или работают без топлива) эти системы руления могут обеспечивать тягу планирования, достаточную для содействия безопасному снижению летательного аппарата на планировании. Дополнительно, они могут давать избыточную и/или дополнительную мощность летательному аппарату,когда необходимо улучшать надежность летательного аппарата. Они могут быть интегрированы с системами нового летательного аппарата и, когда устанавливаются на существующий в эксплуатации летательный аппарат, они могут заменять немаршевые двигатели (например, вспомогательные силовые установки), так что вес летательного аппарата, по существу, не изменяется. В последнем случае, эти системы снижают проблемы низкого коэффициента использования существующих вспомогательных силовых установок и резервных силовых установок, используемых в коммерческой авиации. В частности, вариант 10 осуществления систем руления может быть расположен на летательном аппарате 60 в различных местоположениях, как проиллюстрировано на фиг. 1 А-1 С. Предпочтительное местоположение находится на одном из шасси 62, в которое включены колеса 64. Система 10 А обеспечивает руление летательного аппарата 60 без необходимости работы маршевого(ых) двигателя(ей) 66 летательного аппарата. Фиг. 2 схематически иллюстрирует вариант 10 А осуществления системы руления по фиг. 1A-1 С. Система 10 А включает в себя движитель 12, который, например, может быть двигателем внутреннего сгорания или газотурбинным двигателем, который присоединен к редуктору 14 скорости (SR). Примерным механизмом понижения скорости является редуктор. Выходной вал 16 механизма 14 понижения скорости механически присоединен для приведения в действие колес 64 одного из шасси летательного аппарата, чтобы тем самым обеспечивать рулежную мощность для движения колес и руления летательным аппаратом (60 на фиг. 1 С) без вынуждения запускать маршевый(ые) двигатель(и) (66 на фиг. 1 С). Движитель 12 находится на электронной связи с системой 30 управления, которая также включает в себя панель 32 управления, которая имеет типичные управляющие конструкции (например, приборное оборудование, устройства отображения, элементы управления, индикаторные лампы, аккумуляторные батареи, переключатели и соответствующее программное обеспечение). Такие системы управления широко известны в области летательных аппаратов и, к тому же, конструкции газотурбинных двигателей,вспомогательных силовых установок (APU), резервных силовых установок (EPU) и системах контроля влияния окружающей среды (ECS). Конструкции монтажа двигателя и редукторов также широко известны и вполне обычны для специалистов в данной области техники, соответственно нет необходимости обсуждать детали таких систем, оборудования и конструкций здесь. В предпочтительном варианте осуществления раскрытия система 30 управления обеспечивает пусковую мощность на движитель 12, а также основную выходную мощность и резервную выходную мощность на летательный аппарат. Вариант 10 А осуществления может быть установлен на существующий в эксплуатации летательный аппарат, чтобы обеспечивать достаточную мощность по валу в лошадиных силах на колеса 64 для обеспечения возможности руления. Этот вариант осуществления силовой системы обеспечивает возможность руления, будучи небольшим по размеру и весу, высокоэффективным, высоконадежным, низкозатратным, низким по расходу топлива, более низким по выбросам в окружающую среду и небольшим по объему технического обслуживания и ремонта. Такая система, установленная на существующий в эксплуатации летательный аппарат, потребовала бы минимальных изменений в отношении существующих систем летательного аппарата. Такая система также могла бы быть предусмотрена в качестве стандартного оборудования на новом летательном аппарате. Движитель 12 в предпочтительном варианте осуществления рулежной системы 10 может быть небольшим поршневым двигателем приблизительно от 150 до 400 л.с. в зависимости от размера и веса летательного аппарата и вероятно был бы менее чем 400 фунтов по весу. Такие квалифицированные двигатели для аэрокосмических применений обычно высоконадежны и имели бы необходимость в очень незначительных модификациях для соответствия требованиям вспомогательных силовых систем по настоящему раскрытию. В качестве альтернативы движитель 12 также может быть небольшим газотурбин-2 018165 ным двигателем, который вырабатывает достаточную мощность для приведения в движение колес 64,чтобы обеспечивать возможность руления. Такой двигатель высоконадежен и в комбинации с механизмом понижения скорости добавил бы всего лишь около 160 фунтов к весу летательного аппарата. Фиг. 3 схематично иллюстрирует второй вариант 10 В осуществления. Такая рулежная система могла бы быть расположена в аналогичном местоположении или местоположениях на летательном аппарате 60, как рулежная система по фиг. 2. В этом варианте осуществления силовая система 10 В включает в себя движитель 12, который был бы сконструирован, чтобы иметь высокоскоростной приводной вал (не показан) и низкоскоростной редукторный приводной вал (не показан). Высокоскоростной генератор 18(ALT'NTR) переменного тока был бы установлен на высокоскоростном приводном валу. Генератор 18 переменного тока, как широко известно в данной области техники, также может действовать в качестве стартера/генератора. Механизм 14 понижения скорости также установлен в движителе 12 на низкоскоростном приводном валу, а его выход механически сцеплен для приведения в действие колес 64 летательного аппарата 60. Генератор 18 переменного тока может использоваться в соединении с ECS 22, который выдает кондиционированный воздух, где требуется, в различных отсеках летательного аппарата. Движитель 12 находится на электронной связи с системой 30 управления, которая также включает в себя панель 32 управления (СР), которая включает в себя типичные управляющие конструкции (например, приборное оборудование, устройства отображения, элементы управления, индикаторные лампы,аккумуляторные батареи, переключатели и соответствующее программное обеспечение). Как было обсуждено ранее, такие системы управления широко известны и вполне обычны для специалистов в данной области техники, и нет необходимости обсуждать детали таких систем управления здесь. В этом варианте осуществления раскрытия система 30 управления обеспечивает пусковую мощность на движитель 12,а впоследствии, основную выходную мощность и резервную выходную мощность на летательный аппарат 60. Этот альтернативный вариант 10 В осуществления может быть установлен на существующий в эксплуатации летательный аппарат, чтобы обеспечить достаточную мощность по валу в лошадиных силах на колеса 64 для обеспечения возможности руления. Соответственно нет необходимости запускать маршевые двигатели летательного аппарата. Этот вариант осуществления силовой системы обеспечивает возможность руления, будучи небольшим по размеру и весу, высокоэффективным, высоконадежным,низким по затратам, низким по расходу топлива, более низким по выбросам в окружающую среду и небольшим по объему технического обслуживания и ремонта. Такая система, установленная на существующий в эксплуатации летательный аппарат, потребовала бы минимальных изменений в отношении существующих систем летательного аппарата. Такая система также могла бы быть предусмотрена в качестве стандартного оборудования на новом летательном аппарате. Движитель 12 в этом варианте осуществления раскрытия может быть поршневым двигателем или модифицированным газотурбинным двигателем с генератором 18 переменного тока, являющимся высокоскоростным генератором переменного тока с требуемой выходной мощностью, например, от 30 до 120 кВА. Комбинация движителя 12, генератора 18 переменного тока, механизма 14 понижения скорости(который может быть редуктором) для низких скоростей и соответствующих элементов управления, вероятно, добавили бы летательному аппарату менее чем 600 фунтов веса. Несколько типов двигателей существует в настоящее время, из которых может быть выбран и модифицирован в качестве движителя один пригодный, чтобы обеспечивать надежную, малошумную, низкозатратную систему с легким весом,небольшим объемом технического обслуживания и ремонта, низким расходом топлива и низкими выбросами. Такая силовая система 10, в итоге, могла бы заменить или сделать необязательными традиционные вспомогательные силовые установки, тем самым дополнительно уменьшая общий вес и количество деталей традиционных систем на летательном аппарате. Дополнительно, такая система могла бы быть интегрирована, чтобы дополнять и/или обеспечивать дополнительную электрическую мощность, или сконструирована, чтобы обеспечивать дополнительную избыточность, если необходимо. Фиг. 4 схематически иллюстрирует третий вариант 10 С осуществления для обеспечения руления летательного аппарата 60 без необходимости использовать маршевые двигатели летательного аппарата(66 на фиг. 1 А-1 С). В этом варианте осуществления движитель 12 может быть установлен на летательный аппарат 60 в любом из нескольких подходящих местоположений. Такая силовая система 10 С могла бы без труда быть установлена на существующий в эксплуатации летательный аппарат и вырабатывала бы достаточную тягу, которая давала бы движителю возможность обеспечивать руление летательного аппарата 60 без необходимости запускать маршевые двигатели 66 летательного аппарата. Движитель 12 может быть небольшим газотурбинным двигателем, который обеспечивает достаточную рулежную тягу, при этом рулежная тяга будет зависеть от требований каждого конкретного летательного аппарата. Такой рулежный двигатель в большинстве применений добавлял бы минимальный вес и мог бы быть наименее затратной силовой системой для обеспечения возможности руления для существующего или нового летательного аппарата. Движитель 12 находится на электронной связи с системой 30 управления, которая имеет типичные управляющие конструкции (например, приборное оборудование, устройства отображения, элементы управления, индикаторные лампы, аккумуляторные батареи,переключатели и соответствующее программное обеспечение). В этом варианте 10 С осуществления сис-3 018165 тема 30 управления также обеспечивает пусковую мощность на движитель 12. Варианты осуществления движителя 12 обсуждены ниже более подробно со ссылкой на рулежные двигатели (например, как проиллюстрированные на фиг. 7 А, 7 В, 8, 9 А, 9 В и 10). Фиг. 5 - иллюстрация пассажирского летательного аппарата 60, подобного летательному аппарату по фиг. 1A-1 С. Летательный аппарат 60 показан в режиме полета, в котором каждый из маршевых двигателей 66 является обеспечивающим полетную тягу 65 в направлении полетной тяги, при этом полетная тяга и направление достаточны для непрерывного полета. Фиг. 6 иллюстрирует летательный аппарат 60 по фиг. 5 в положении для руления по рулежной дорожке 67, которая, например, могла бы быть поверхностью выхода на посадку, поверхностью ангара, поверхностью зоны технического обслуживания, поверхностью взлетно-посадочной полосы или служебной поверхностью, ведущей на поверхность взлетнопосадочной полосы. Отмечено, что эти поверхности аэропорта иногда в целом указываются ссылкой как бетонированная площадка. Для содействия рулению летательный аппарат включает в себя рулежный двигатель, расположенный в области летательного аппарата, такой как окруженный прерывистой линией 7 А. Как упомянуто выше, варианты осуществления рулежного двигателя движителя 12 по фиг. 4 описаны на фиг. 7 А, 7 В, 8, 9 А, 9 В и 10. В частности, фиг. 7 А - увеличенный вид области 7 А по фиг. 6, а фиг. 7 В - вид сверху конструкции по фиг. 7 А. Эти чертежи показывают хвостовую конструкцию 60 Т самолета 60, которая включает в себя вертикальный стабилизатор 68 и горизонтальные стабилизаторы 69. Они также иллюстрируют движитель по фиг. 10 С в виде рулежного двигателя 70, который установлен в хвостовой конструкции 60 Т летательного аппарата 60. Рулежный двигатель выполнен с возможностью вырабатывать рулежную тягу 75, которая достаточна для начинания и поддержки руления летательного аппарата по рулежной поверхности (67 на фиг. 6, которая также показывает рулежную тягу 75). Рулежный двигатель 70 предпочтительно является газотурбинным двигателем, который втягивает воздух в воздухозаборную часть и формирует выхлоп из выхлопной части, чтобы, тем самым, обеспечивать рулежную тягу 75. Предпочтительно хвостовая конструкция 60 Т модифицируется, чтобы определить воздухозаборное отверстие 72, которое улучшает воздушный поток в воздухозаборник рулежного двигателя 70. Хотя рулежный двигатель 70 показан в местоположении, в котором он частично тянется за пределами очертаний летательного аппарата, двигатель может быть расположен и в других местоположениях. Например, он может быть расположен дальше вперед, как в местоположении 73. Как показано на фиг. 7 В, рулежный двигатель 70 может включать в себя механизм 80 управления направлением тяги (например, поворотный направляющий аппарат, расположенный в выхлопе двигателя), который заставляет рулежную тягу 75 по фиг. 7 А поворачиваться по азимуту на угол 82 поворота(например, угол поворота порядка 10%). Хотя пассажирский летательный аппарат обычно имеет другое средство управления (например, управляемое носовое колесо) для направления его вдоль рулежной дорожки, этот вариант осуществления рулежного двигателя может быть полезным при улучшении этого управления (более точно, когда большой летательный аппарат является осуществляющим руление в затрудненных условиях, таких как ветреные условия). Вариант 70 осуществления рулежного двигателя проиллюстрирован на фиг. 8. Двигатель предпочтительно является газотурбинным двигателем, имеющим воздухозаборную конструкцию 77 и выхлопную конструкцию 78. Двигатель также предпочтительно включает в себя вспомогательную конструкцию 79 (например, содержащую стартер, генератор, топливный насос, масляный насос, редуктор, управляющую электронику и соответствующее программное обеспечение), которая может обеспечивать функции(например, охлаждение, отопление, освещение, гидравлику, запуск двигателя, проверку наземных систем и резервное питание) традиционных вспомогательных конструкций летательного аппарата (например,APU, EPU и ECS). Табл. 90 по фиг. 9 А показывает, что примерный пассажирский летательный аппарат, такой как Боинг 737-300, имеет взлетный вес между 125000 и 140000 фунтами и включает в себя два маршевых двигателя, каждый из которых весит порядка 4300 фунтов. Каждый из этих маршевых двигателей может вырабатывать взлетную тягу между 20000 и 22000 фунтов (около нормальных условий на уровне моря). Как только летательный аппарат находится в условиях горизонтального полета на крейсерском режиме,каждый двигатель типично создает крейсерскую тягу между 4600 и 5100 фунтов. Было обнаружено (например, посредством рулежных испытаний с примерным пассажирским летательным аппаратом), что требуется уровень начальной тяги для начала руления летательного аппарата и что меньшая тяга требуется для поддержки руления. В результате этих рулежных испытаний было определено, что рулежному двигателю для летательного аппарата Боинг 737-300 нужно создать тягу страгивания всего лишь порядка 3000 фунтов и может весить настолько мало, как 600 фунтов (эта тяга страгивания является более высокой рулежной тягой для начала руления, которая была введена выше). Рулежная тяга и вес рулежного двигателя показаны в табл. 90 по фиг. 9 А, а результаты рулежных испытаний обобщены в табл. 92 по фиг. 9 В. Табл. 92 поэтому показывает, что весу рулежного двигателя необходимо быть всего лишь приблизительно 7,0% веса от общего веса маршевых двигателей летательного аппарата и что тяге рулежного двигателя (тяге 75 на фиг. 6 и 7 А) необходимо быть всего лишь приблизительно 7,5% совокупной взлетной тяги маршевых двигателей. То есть весовой процент в 7,0% и/или процент тяги в 7,5% достаточны для выполнения страгивания и продолжения руления для пассажирского летательного аппарата. Для того чтобы обеспечить разумный эксплуатационный запас для рабочих параметров, таких как условия окружающей среды (например, возвышение и температура), условия аэропорта(например, изменение покрытия взлетно-посадочной полосы и уклон взлетно-посадочной полосы) и изменения оборудования (например, разные модели и производители летательного аппарата), весовой процент и процент тяги могли быть соответственно уменьшены до максимальных значений 10 и 15%. Эти процентные отношения являются значительно иными, чем у современных немаршевых двигателей. В дополнение к обладанию рулежной тяги, которая масштабирована надлежащим образом к совокупной взлетной тяги маршевых двигателей, самолетный рулежный двигатель предпочтительно сконфигурирован, так что его рулежная тяга имеет предпочтительное отношение к его стандартной расчетной тяге, с тем чтобы он также работал с высоким коэффициентом полезного действия. График 96 по фиг. 10 графически изображает коэффициент полезного действия в зависимости от тяги для типичных газотурбинных двигателей, таких как на Боинге 737-300. В частности, тяга двигателя показана по горизонтальной оси фиг. 10 в качестве процентного отношения стандартной расчетной тяги двигателя, при этом стандартная расчетная тяга двигателя является максимальной продолжительной рекомендованной тягой - газотурбинный двигатель может превышать свою расчетную тягу, но должен делать это только в течение ограниченных периодов времени. Коэффициент полезного действия показан по вертикальной оси, при этом коэффициент полезного действия определен в материалах настоящей заявки в качестве отношения фунтов тяги к фунтам топлива, расходуемого каждый час. График 97 указывает, что газотурбинные маршевые двигатели демонстрируют высокий коэффициент полезного действия, когда их тяга является действующей между 33 и 100% их расчетной тяги. График 97 дополнительно указывает, что коэффициент полезного действия быстро ухудшается по мере того,как рабочая тяга уменьшается ниже 33% расчетной тяги, и по мере того, как рабочая тяга увеличивается выше 100% расчетной тяги. Большие маршевые двигатели типично включают в себя большое количество компрессоров низкого давления (LP) и высокого давления (HP) и ступеней турбины, которые помогают расширять график коэффициента полезного действия. В противоположность, меньший рулежный двигатель 70 по фиг. 7 А, 7 В и 8, как правило, имеет меньшее количество ступеней и соответственно его график 98 коэффициента полезного действия уже, чем график 98, а его нижняя и верхняя полосы быстрее уменьшаются. Маршевые двигатели пассажирского летательного аппарата, такого как Боинг 737-300, предпочтительно сконфигурированы так, что они являются, как правило, работающими в диапазоне между 33 и 100% своей стандартной расчетной тяги, и наиболее эффективны, когда маршевые двигатели летательного аппарата работают на своей крейсерской тяге. Когда эти маршевые двигатели используются для выработки гораздо более низкой рулежной тяги вдоль бетонной площадки, они работают гораздо ниже 33% своей расчетной тяги и соответственно являются работающими крайне неэффективным образом. В противоположность, гораздо меньший рулежный двигатель 70 по фиг. 7 А, 7 В и 8 предпочтительно сконфигурирован с расчетной тягой такой, чтобы он был работающим с максимальным коэффициентом полезного действия, когда он вырабатывает свою рулежную тягу. Например, расчетная тяга рулежного двигателя предпочтительно выбирается так, что рулежная тяга рулежного двигателя 70 подпадает под предпочтительный диапазон 99 по фиг. 10, который находится между 40 и 100% расчетной тяги рулежного двигателя. Когда пассажирская нагрузка низка, и/или низка загрузка топлива, рулежной тяге может быть нужно находиться около нижнего края диапазона 99, а когда пассажирская нагрузка высока,и/или высока загрузка топлива, рулежной тяге может быть нужно находиться около верхнего края этого диапазона. Когда удовлетворены эти критерии, как маршевые, так и рулежный двигатели будут работающими на или около максимального коэффициента полезного действия, а эксплуатационный затраты летательного аппарата будут значительно уменьшены. Варианты осуществления раскрытия, описанные в материалах настоящей заявки, являются примерными, и можно без труда предусмотреть многочисленные модификации, варианты и переделки для достижения, по существу, эквивалентных результатов, все из которых подразумеваются охваченными в пределах сущности и объема прилагаемой формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Тяговая система для летательного аппарата, имеющего хвостовую часть, содержащая один или более маршевых двигателей, расположенных на упомянутом летательном аппарате, причем каждый из упомянутых маршевых двигателей имеет взлетную тягу, соответствующую максимальной расчетной тяге, меньшую крейсерскую тягу и тягу на малом газе, которая равна или меньше крейсерской тяги, причем все маршевые двигатели вместе обеспечивают объединенную расчетную тягу, достаточную для взлета, упомянутые двигатели выполнены с возможностью направлять упомянутую взлетную тягу в направлении взлетной тяги; рулежный двигатель, размещенный в фюзеляже в упомянутой хвостовой части, причем рулежный двигатель имеет максимальную расчетную тягу, соответствующую максимальной рулежной тяге, упомя-5 018165 нутая максимальная рулежная тяга меньше, чем упомянутая тяга на малом газе или крейсерская тяга и не превышает 15% упомянутой объединенной взлетной тяги, обеспечиваемой маршевыми двигателями, и выполненный с возможностью направлять упомянутую рулежную тягу в направлении рулежной тяги,которое является, по существу, таким же, как упомянутое направление взлетной тяги,причем упомянутый рулежный двигатель не используется для обеспечения тяги для летательного аппарата при взлете или в полете; а упомянутая максимальная рулежная тяга составляет менее 33% расчетной тяги одного из одного или более маршевых двигателей; упомянутая рулежная тяга, в силу этого,достаточна для руления упомянутого летательного аппарата по рулежной дорожке. 2. Система по п.1, в которой упомянутая рулежная тяга не превышает 7,5% упомянутой объединенной взлетной тяги. 3. Система по п.1, в которой все из упомянутых маршевых двигателей имеют в совокупности вес маршевых двигателей, а упомянутый рулежный двигатель сконфигурирован с весом рулежного двигателя, который не превышает 10% упомянутого веса маршевых двигателей. 4. Система по п.3, в которой упомянутый вес рулежного двигателя не превышает 7,0% упомянутого веса маршевых двигателей. 5. Система по п.3, в которой упомянутый рулежный двигатель дополнительно сконфигурирован,чтобы иметь рулежную тягу между 40 и 100% упомянутой максимальной рулежной тяги, так что коэффициент полезного действия рулежного двигателя приблизительно равняется его максимальному коэффициенту полезного действия. 6. Система по п.5, в которой упомянутый вес рулежного двигателя не превышает 10% упомянутого веса маршевых двигателей. 7. Система по п.1, в которой упомянутый рулежный двигатель включает в себя поворотную часть двигателя, чтобы отклонять упомянутую рулежную тягу по азимутальному углу для содействия рулению упомянутого летательного аппарата по упомянутой рулежной дорожке. 8. Система по п.7, в которой упомянутая поворотная часть двигателя является поворотным направляющим аппаратом, а упомянутый азимутальный угол равен по меньшей мере 10. 9. Способ руления летательного аппарата, который несет один или более маршевых двигателей,причем каждый имеет максимальную расчетную тягу, при этом все маршевые двигатели вместе обеспечивают общую расчетную тягу, достаточную для взлета в направлении взлетной тяги, и рулежный двигатель, имеющий максимальную расчетную тягу, которая меньше 15% упомянутой общей расчетной тяги одного или более маршевых двигателей, причем упомянутый рулежный двигатель расположен в хвосте летательного аппарата, способ содержит этапы, на которых направляют тягу рулежного двигателя в направлении рулежной тяги, которое является, по существу, таким же, как упомянутое направление полетной тяги, чтобы тем самым осуществлять руление упомянутого летательного аппарата по рулежной дорожке, причем тяга рулежного двигателя не используется для обеспечения тяги при взлете и в полете,при этом максимальная расчетная тяга рулежного двигателя составляет менее 33% расчетной тяги одного или более маршевых двигателей. 10. Способ по п.9, в котором упомянутый этап обеспечения включает в себя этап, на котором ограничивают упомянутую рулежную тягу до 7,5% упомянутой объединенной полетной тяги. 11. Способ по п.9, в котором все из упомянутых маршевых двигателей имеют, в совокупности, вес маршевых двигателей и дополнительно включает в себя этап, на котором ограничивают вес рулежного двигателя упомянутого рулежного двигателя до 10% упомянутого веса маршевых двигателей. 12. Способ по п.11, в котором упомянутый этап ограничения включает в себя этап, на котором дополнительно ограничивают упомянутый вес рулежного двигателя до 7,0% упомянутого веса маршевых двигателей. 13. Способ по п.11, дополнительно включающий в себя этап, на котором конфигурируют упомянутый рулежный двигатель, чтобы он имел рулежную тягу между 40 и 100% упомянутой расчетной тяги рулежного двигателя. 14. Способ по п.13, в котором упомянутый вес рулежного двигателя составляет до 10% упомянутого веса маршевых двигателей. 15. Летательный аппарат, который включает в себя рулежную систему и по меньшей мере один маршевый двигатель, имеющий максимальную расчетную тягу, причем все маршевые двигатели вместе обеспечивают общую расчетную тягу, достаточную для взлета в направлении взлетной тяги, причем каждый из упомянутого по меньшей мере одного маршевого двигателя имеет минимальную тягу для эффективной работы при 33% от упомянутой максимальной расчетной тяги, упомянутая рулежная система содержит рулежный двигатель на упомянутом летательном аппарате, имеющий максимальную расчетную тягу, соответствующую максимальной рулежной тяге, которая не превышает 15% общей расчетной тяги маршевых двигателей, и выполненный с возможностью направлять упомянутую рулежную тягу в направлении рулежной тяги, которое является, по существу, таким же, как упомянутое направление взлетной тяги; упомянутая максимальная рулежная тяга меньше, чем упомянутая минимальная тяга для эффективной работы маршевого двигателя и обеспечивает начальную тягу, достаточную для руления упомянутого летательного аппарата по рулежной дорожке. 16. Летательный аппарат по п.15, в котором упомянутая рулежная тяга не превышает 7,5% упомянутой общей расчетной тяги. 17. Летательный аппарат по п.15, в котором все из упомянутых маршевых двигателей имеют, в совокупности, вес маршевых двигателей, а упомянутый рулежный двигатель сконфигурирован с весом рулежного двигателя, который не превышает 10% упомянутого веса маршевых двигателей. 18. Летательный аппарат по п.17, в котором упомянутый вес рулежного двигателя не превышает 7,0% упомянутого веса маршевых двигателей. 19. Летательный аппарат по п.15, в котором упомянутый рулежный двигатель дополнительно сконфигурирован, чтобы обеспечивать рулежную тягу между 40 и 100% упомянутой максимальной рулежной тяги, так что коэффициент полезного действия рулежного двигателя приблизительно равен его максимальному коэффициенту полезного действия. 20. Летательный аппарат по п.19, в котором упомянутая рулежная тяга не превышает 15% упомянутой общей расчетной тяги; упомянутый вес рулежного двигателя не превышает 10% общего веса маршевых двигателей всех упомянутых маршевых двигателей. 21. Способ по п.9, в котором рулежный двигатель обеспечивает движение по земле летательного аппарата без использования маршевых двигателей. 22. Летательный аппарат по п.15, в котором тяга рулежного двигателя меньше чем приблизительно 3000 фунтов или меньше чем 15% взлетной тяги. 23. Летательный аппарат по п.15, в котором каждый маршевый двигатель имеет расчетную тягу по меньшей мере приблизительно 20000 фунтов, а рулежный двигатель имеет тягу страгивания менее чем приблизительно 3000 фунтов, упомянутый рулежный двигатель работает эффективно до тяги приблизительно 1200 фунтов.
МПК / Метки
МПК: B64D 27/20
Метки: аппарата, система, летательного, руления
Код ссылки
<a href="https://eas.patents.su/11-18165-sistema-ruleniya-letatelnogo-apparata.html" rel="bookmark" title="База патентов Евразийского Союза">Система руления летательного аппарата</a>
Устройство, система и способ обеспечения безопасности летательного аппарата

Номер патента: 9112
Опубликовано: 26.10.2007
Автор: Арнуз Майкл
МПК: G08B 29/00
Метки: способ, устройство, обеспечения, летательного, аппарата, безопасности, система
Формула / Реферат:
1. Механизм обеспечения безопасности для идентификации уполномоченных пользователей, включающий орган управления, управляемый пользователем; одно или более устройство обеспечения безопасности для идентификации пользователя, пытающегося управлять органом управления; и одно или более устройство контроля для определения, уполномочен ли идентифицированный пользователь управлять органом управления, при этом указанные устройства контроля заранее...
Интегрированная система вихревой безопасности летательного аппарата
Номер патента: 8093
Опубликовано: 27.02.2007
Авторы: Баранов Николай Алексеевич, Пасекунов Игорь Владимирович, Белоцерковский Андрей Сергеевич, Каневский Михаил Игоревич
МПК: G01S 17/93, G01S 13/93, G01C 23/00...
Метки: аппарата, вихревой, безопасности, система, интегрированная, летательного
Формула / Реферат:
1. Интегрированная система вихревой безопасности летательного аппарата, включающая подсистему (1) информации о летательном аппарате, способную фиксировать, сохранять и предоставлять пользователям информацию о конфигурации, положении, скорости перемещения и ориентации летательного аппарата в пространстве; подсистему (2) информации о генераторах вихревого следа, способную фиксировать, сохранять и предоставлять пользователям информацию о типе,...
Система и способ обеспечения безопасности летательного аппарата и предотвращения его захвата
Номер патента: 9538
Опубликовано: 28.02.2008
Автор: Арнуз Майкл
МПК: G06K 9/00
Метки: способ, система, безопасности, захвата, предотвращения, обеспечения, аппарата, летательного
Формула / Реферат:
1. Способ управления летательным аппаратом, включающий ввод информации о плане полета в систему контроля; вычисление допусков отклонения, относящихся к плану полета; управление летательным аппаратом согласно плану полета; отклонение от плана полета в случае необходимости изменения плана полета, при этом в случае отклонения от плана полета оценивают, имеет ли место возможная враждебная ситуация, путем определения, находится ли отклонение от плана...
Способ и система предупреждения о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей
Номер патента: 8091
Опубликовано: 27.02.2007
Авторы: Белоцерковский Андрей Сергеевич, Баранов Николай Алексеевич, Каневский Михаил Игоревич, Пасекунов Игорь Владимирович
МПК: G01S 13/93
Метки: опасную, зону, генератора, вихрей, следа, возможности, попадания, вихревого, система, способ, аппарата, предупреждения, летательного
Формула / Реферат:
1. Способ предупреждения о возможности попадания летательного аппарата в опасную зону вихревого следа генератора вихрей, в котором получают информацию о конфигурации, местонахождении и ориентации летательного аппарата относительно инерциальной системы координат в текущий момент времени; получают информацию о положении, геометрических и массовых характеристиках генератора вихрей относительно той же системы координат в текущий момент времени и о...
Система крепления передней кромки к конструкции несущей поверхности летательного аппарата
Номер патента: 11334
Опубликовано: 27.02.2009
Авторы: Перес-Родригес Давид, Бальестеро-Мендес Хорхе
МПК: B64C 21/06, B64C 3/28
Метки: несущей, аппарата, летательного, кромки, система, поверхности, передней, крепления, конструкции
Формула / Реферат:
1. Система крепления сборной передней кромки к конструкции несущей поверхности летательного аппарата, причем передняя кромка (2) включает обшивку (4), состоящую из первой пластины (5) и второй пластины (6), между которыми образована герметизированная внутренняя полость, разделенная на несколько камер (7) всасывания, и плоское ребро (21), имеющее юбку (19), посредством которой оно прикреплено к обшивке (4), отличающаяся тем, что она содержит...
Предыдущий патент: Микрооптическая система формирования изображений для визуального контроля подлинности изделий
Следующий патент: Способ и устройство изготовления трехслойного корда типа гуммированного внутри корда
Случайный патент: Трициклические производные n,n'-замещенных 3,7-диазабицикло[3.3.1]нонанов и лекарственные средства на их основе