Устройство и способ подключения подводного гибкого стояка к конструкции на поверхности
Формула / Реферат
1. Устройство для подключения подводного гибкого стояка к конструкции на поверхности, причем указанный подводный гибкий стояк (14) имеет конечное соединение (15), закрепленное на его соединительном конце, и тяговую головку (16), подключенную к указанному конечному соединению (15), при этом указанное устройство включает в себя соединительное устройство (8), закрепленное на одном конце подводного гибкого стояка (14), и направляющее устройство (1; 51), которое содержит направляющее средство (2В) и стопорное средство (27; 27А) для блокировки соединительного устройства (8), когда соединительное устройство поднято с морского дна при помощи, по меньшей мере, одного троса (19), так, что когда осуществлена блокировка соединительного устройства (8) на направляющем устройстве (1; 51), тогда соединительный конец подводного гибкого стояка (14) может продолжать подниматься за счет тяги троса (19) до любой точки на конструкции, которая расположена на поверхности моря, в которой будет осуществлено подключение подводного гибкого стояка (14), отличающееся тем, что устройство включает в себя исполнительное средство (6, 24; 39) для разблокирования указанного стопорного средства (27; 27А), предназначенное для разъединения соединительного устройства (8) от направляющего устройства (1; 51).
2. Устройство по п.1, отличающееся тем, что соединительное устройство (8) имеет направляющую (11), верхняя часть (11А) которой имеет форму цилиндра, а нижняя часть (11В) которой имеет форму усеченного конуса.
3. Устройство для подключения подводного гибкого стояка к конструкции на поверхности, причем указанный подводный гибкий стояк (14) имеет конечное соединение (15), закрепленное на его соединительном конце, и тяговую головку (16), подключенную к указанному конечному соединению (15), при этом указанное устройство включает в себя соединительное устройство (8), закрепленное на одном конце подводного гибкого стояка (14), и направляющее устройство (1; 51), которое содержит направляющее средство (2В) и стопорное средство (27; 27А) для блокировки соединительного устройства (8), когда соединительное устройство поднято с морского дна при помощи, по меньшей мере, одного троса (19), так, что когда произведена блокировка соединительного устройства (8) на направляющем устройстве (1; 51), то тогда соединительный конец подводного гибкого стояка (14) может продолжать подниматься за счет тяги троса (19) до любой точки на конструкции, которая расположена на поверхности моря, в которой будет осуществлено подключение подводного гибкого стояка (14), отличающееся тем, что соединительное устройство (8) имеет направляющую (11), верхняя часть (11А) которой имеет форму цилиндра, а нижняя часть (11В) которой имеет форму усеченного конуса; и тем, что стопорный механизм (27; 27А) содержит стопорные пластины, установленные с возможностью поворота на направляющем устройстве (1; 51) и имеющие форму, которая позволяет осуществлять их зацепление с имеющей вид усеченного конуса нижней частью (11В) направляющей (11).
4. Устройство по п.3, отличающееся тем, что нижняя часть каждой стопорной защелки (3) выполнена в виде зуба (21) и может заходить внутрь щели в нижней части (2В) корпуса (2) направляющего устройства (1; 51) для зацепления с имеющей вид усеченного конуса нижней частью (11В) направляющей (11).
5. Устройство по одному из пп. 3 или 4, отличающееся тем, что стопорное средство (27) направляющего устройства (1), предназначенное для блокировки соединительного устройства (8), представляет собой стопорный механизм, который включает в себя стопорное кольцо (5), втулку разблокирования (6), направляющий элемент (7), опоры (20) и упругие элементы (4) для стопорных защелок (3), причем направляющий элемент (7) и опоры (20) надежно закреплены на корпусе (2), а осями поворота для стопорных защелок (3) являются пальцы (18), надежно закрепленные на опорах (20), при этом внутри опор (20) предусмотрены упругие элементы (4), функцией которых является удержание стопорных защелок (3) в положении блокировки, причем стопорное кольцо (5) предназначено для удержания соответствующей стопорной защелки (3) в положении блокировки, после сочленения соединительного устройства (8) с направляющим устройством (1), чтобы предотвратить, после завершения операции соединения, разблокирование соединительного устройства (8) за счет любых возможных вибраций или перемещений.
6. Устройство по одному из пп.3 или 4, отличающееся тем, что стопорное средство направляющего устройства (51), предназначенное для блокировки соединительного устройства (8), представляет собой стопорный механизм (27А), который включает в себя опоры (31) для стопорных защелок (30), упругие элементы (32), пальцы (33) и средства ограничения перемещения (35), причем стопорные защелки (30) закреплены на опорах (31) при помощи пальцев (33), а средства ограничения перемещения (35) установлены на верхней части стопорных защелок (30), при этом стопорные защелки (30) установлены на опорах (31) так, что они могут поворачиваться вокруг осей пальцев (33) и перемещаться поперечно наклонно относительно оси симметрии корпуса (2), причем в нижней части опор (31) установлены упругие элементы (32), функцией которых является удержание стопорных защелок (30) в положении блокировки, после сочленения соединительного устройства (8) с направляющим устройством (51), чтобы предотвратить после завершения операции соединения разблокирование соединительного устройства (8) за счет любых возможных вибраций или перемещений.
7. Устройство по одному из пп.1-4, отличающееся тем, что соединительный конец подводного гибкого стояка (14) заключен в создающий изгиб элемент жесткости (9).
8. Устройство по одному из пп.1-4, отличающееся тем, что соединительный конец подводного гибкого стояка (14) закреплен на соединительном устройстве (8) при помощи срезных штифтов (12).
9. Устройство по одному из пп.1-4, отличающееся тем, что направляющее средство направляющего устройства (1; 51), предназначенное для задания направления соединительного устройства (8), содержит корпус (2), верхняя часть (2А) которого имеет форму цилиндра, а нижняя часть (2В) которого имеет форму усеченного конуса, причем нижняя часть (2В) действует как буфер для нижней части (11В) корпуса (11) соединительного устройства (8).
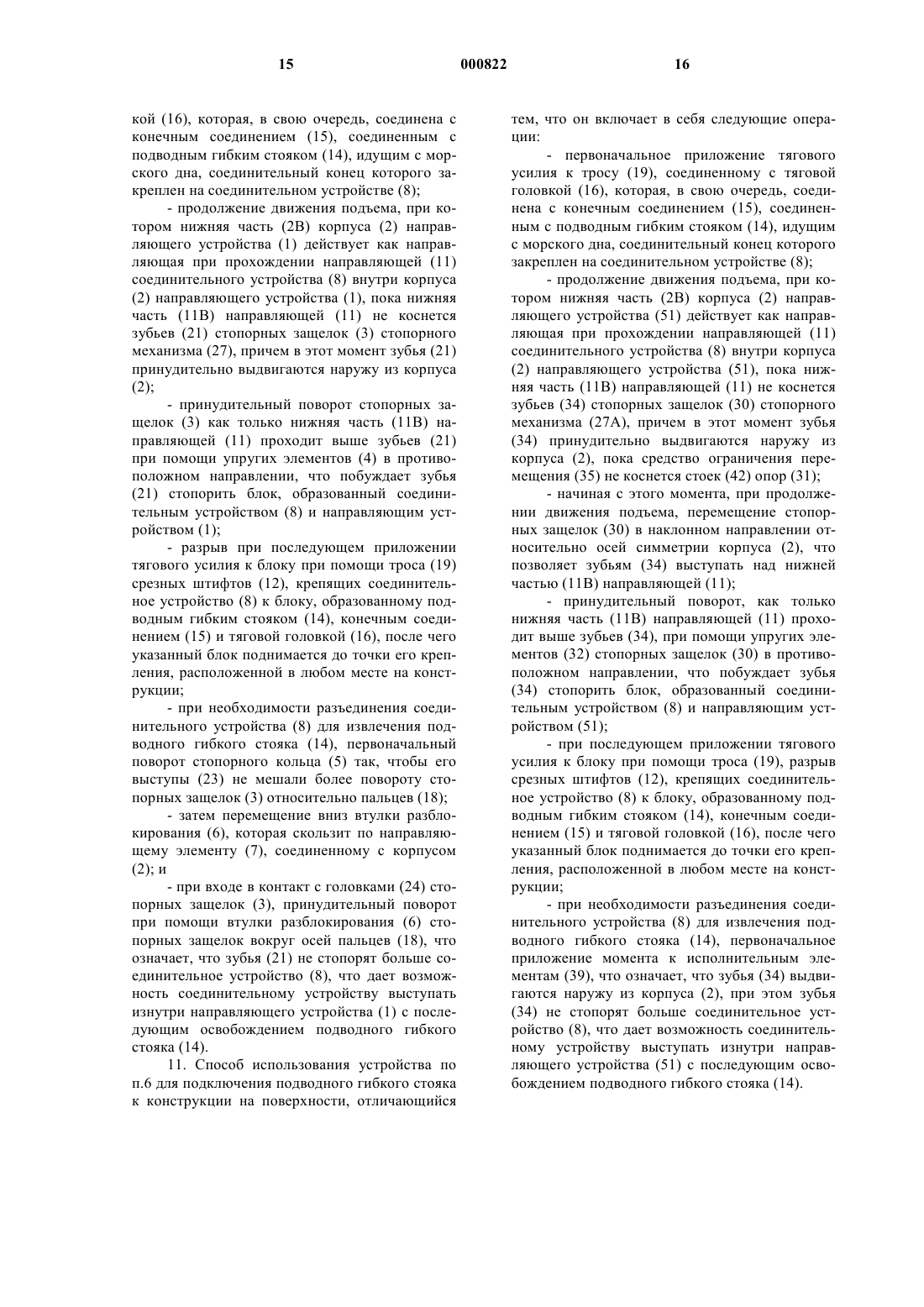
10. Способ использования устройства по п.5 для подключения подводного гибкого стояка к конструкции на поверхности, отличающийся тем, что он включает в себя следующие операции:
- первоначальное приложение движения вращения к стопорному кольцу (5) стопорного механизма (27) таким образом, чтобы выступы (23) стопорного кольца (5) не мешали движению поворота стопорных защелок (3) вокруг осей пальцев (18), закрепленных на опорах (20), которые соединены с корпусом (2) направляющего устройства (1);
- последующее приложение тягового усилия к тросу (19), соединенному с тяговой головкой (16), которая, в свою очередь, соединена с конечным соединением (15), соединенным с подводным гибким стояком (14), идущим с морского дна, соединительный конец которого закреплен на соединительном устройстве (8);
- продолжение движения подъема, при котором нижняя часть (2В) корпуса (2) направляющего устройства (1) действует как направляющая при прохождении направляющей (11) соединительного устройства (8) внутри корпуса (2) направляющего устройства (1), пока нижняя часть (11В) направляющей (11) не коснется зубьев (21) стопорных защелок (3) стопорного механизма (27), причем в этот момент зубья (21) принудительно выдвигаются наружу из корпуса (2);
- принудительный поворот стопорных защелок (3) как только нижняя часть (11В) направляющей (11) проходит выше зубьев (21) при помощи упругих элементов (4) в противоположном направлении, что побуждает зубья (21) стопорить блок, образованный соединительным устройством (8) и направляющим устройством (1);
- разрыв при последующем приложении тягового усилия к блоку при помощи троса (19) срезных штифтов (12), крепящих соединительное устройство (8) к блоку, образованному подводным гибким стояком (14), конечным соединением (15) и тяговой головкой (16), после чего указанный блок поднимается до точки хую крепления, расположенной в любом месте на конструкции;
- при необходимости разъединения соединительного устройства (8) для извлечения подводного гибкого стояка (14), первоначальный поворот стопорного кольца (5), так чтобы его выступы (23) не мешали более повороту стопорных защелок (3) относительно пальцев (18);
- затем перемещение вниз втулки разблокирования (6), которая скользит по направляющему элементу (7), соединенному с корпусом (2); и
- при входе в контакт с головками (24) стопорных защелок (3), принудительный поворот при помощи втулки разблокирования (6) стопорных защелок вокруг осей пальцев (18), что означает, что зубья (21) не стопорят больше соединительное устройство (8), что дает возможность соединительному устройству выступать изнутри направляющего устройства (1), с последующим освобождением подводного гибкого стояка (14).
11. Способ использования устройства по п.6 для подключения подводного гибкого стояка к конструкции на поверхности, отличающийся тем, что он включает в себя следующие операции:
- первоначальное приложение тягового усилия к тросу (19), соединенному с тяговой головкой (16), которая, в свою очередь, соединена с конечным соединением (15), соединенным с подводным гибким стояком (14), идущим с морского дна, соединительный конец которого закреплен на соединительном устройстве (8);
- продолжение движения подъема, при котором нижняя часть (2В) корпуса (2) направляющего устройства (51) действует как направляющая при прохождении направляющей (11) соединительного устройства (8) внутри корпуса (2) направляющего устройства (51), пока нижняя часть (11В) направляющей (11) не коснется зубьев (34) стопорных защелок (30) стопорного механизма (27А), причем в этот момент зубья (34) принудительно выдвигаются наружу из корпуса (2), пока средство ограничения перемещения (35) не коснется стоек (42) опор (31);
- начиная с этого момента, при продолжении движения подъема, перемещение стопорных защелок (30) в наклонном направлении относительно осей симметрии корпуса (2), что позволяет зубьям (34) выступать над нижней частью (11В) направляющей (11);
- принудительный поворот, как только нижняя часть (11В) направляющей (11) проходит выше зубьев (34), при помощи упругих элементов (32) стопорных защелок (30) в противоположном направлении, что побуждает зубья (34) стопорить блок, образованный соединительным устройством (8) и направляющим устройством (51);
- при последующем приложении тягового усилия к блоку при помощи троса (19), разрыв срезных штифтов (12), крепящих соединительное устройство (8) к блоку, образованному подводным гибким стояком (14), конечным соединением (15) и тяговой головкой (16), после чего указанный блок поднимается до точки его крепления, расположенной в любом месте на конструкции;
- при необходимости разъединения соединительного устройства (8) для извлечения подводного гибкого стояка (14), первоначальное приложение момента к исполнительным элементам (39), что означает, что зубья (34) выдвигаются наружу из корпуса (2), при этом зубья (34) не стопорят больше соединительное устройство (8), что дает возможность соединительному устройству выступать изнутри направляющего устройства (51), с последующим освобождением подводного гибкого стояка (14).

Текст
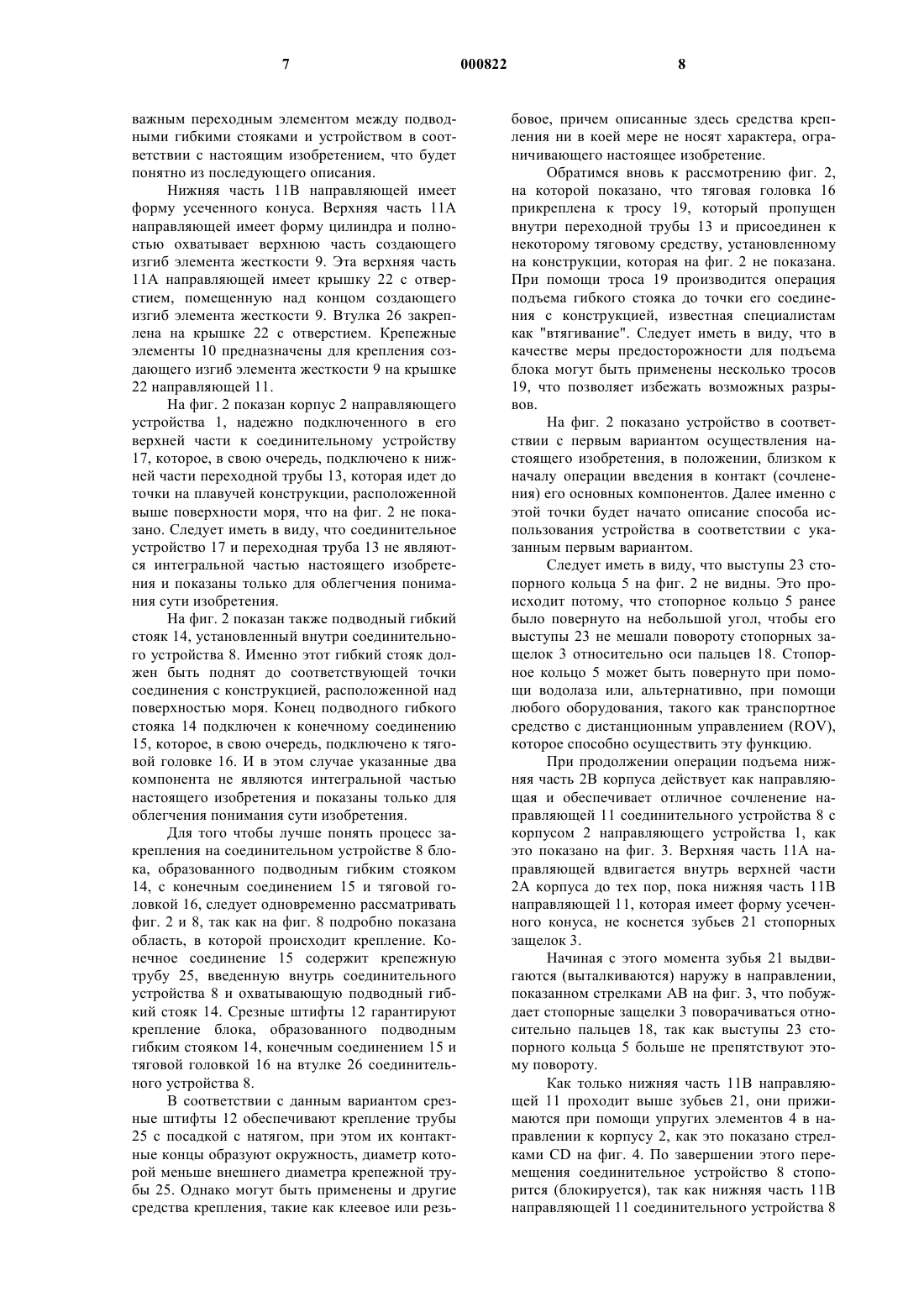
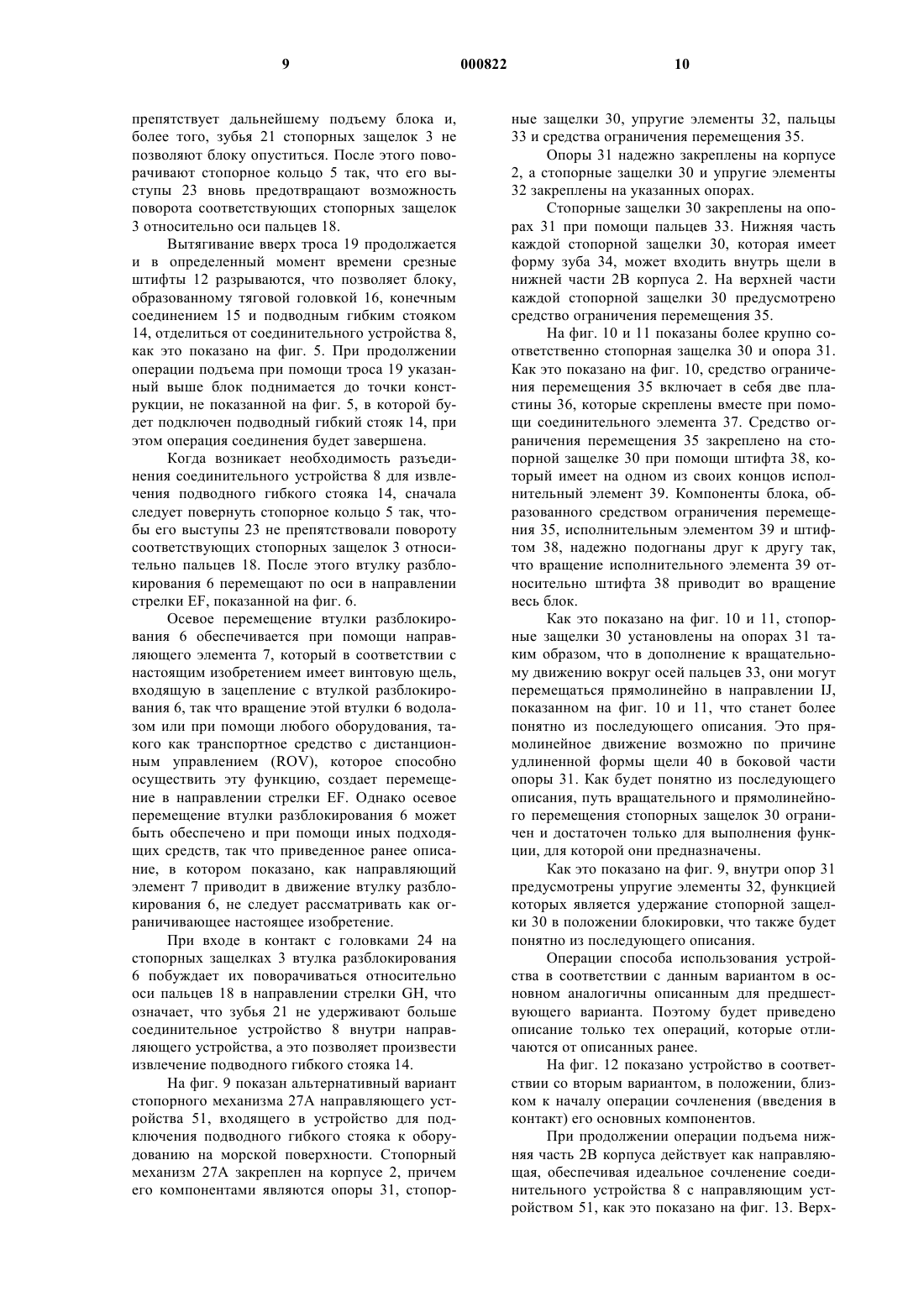
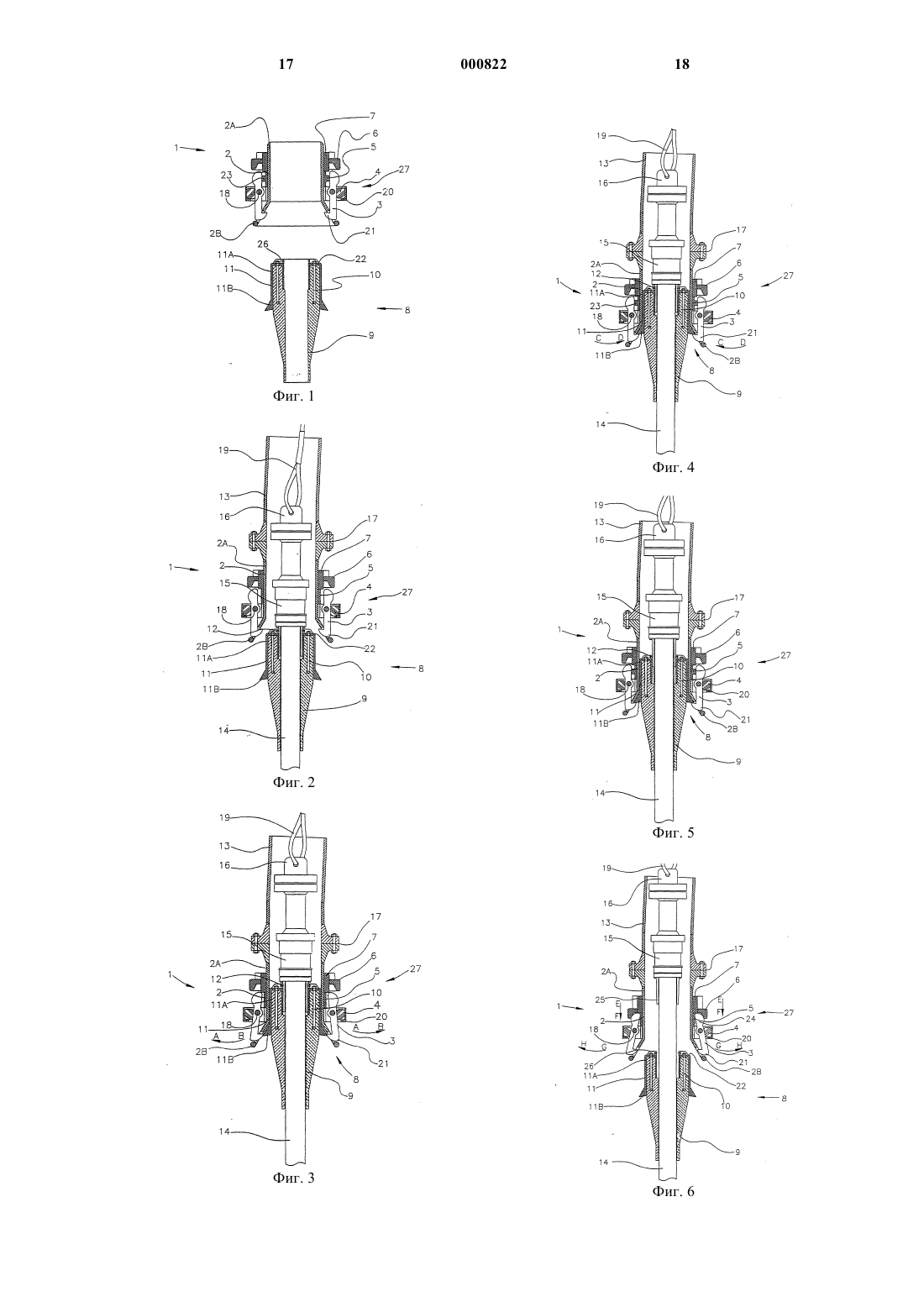
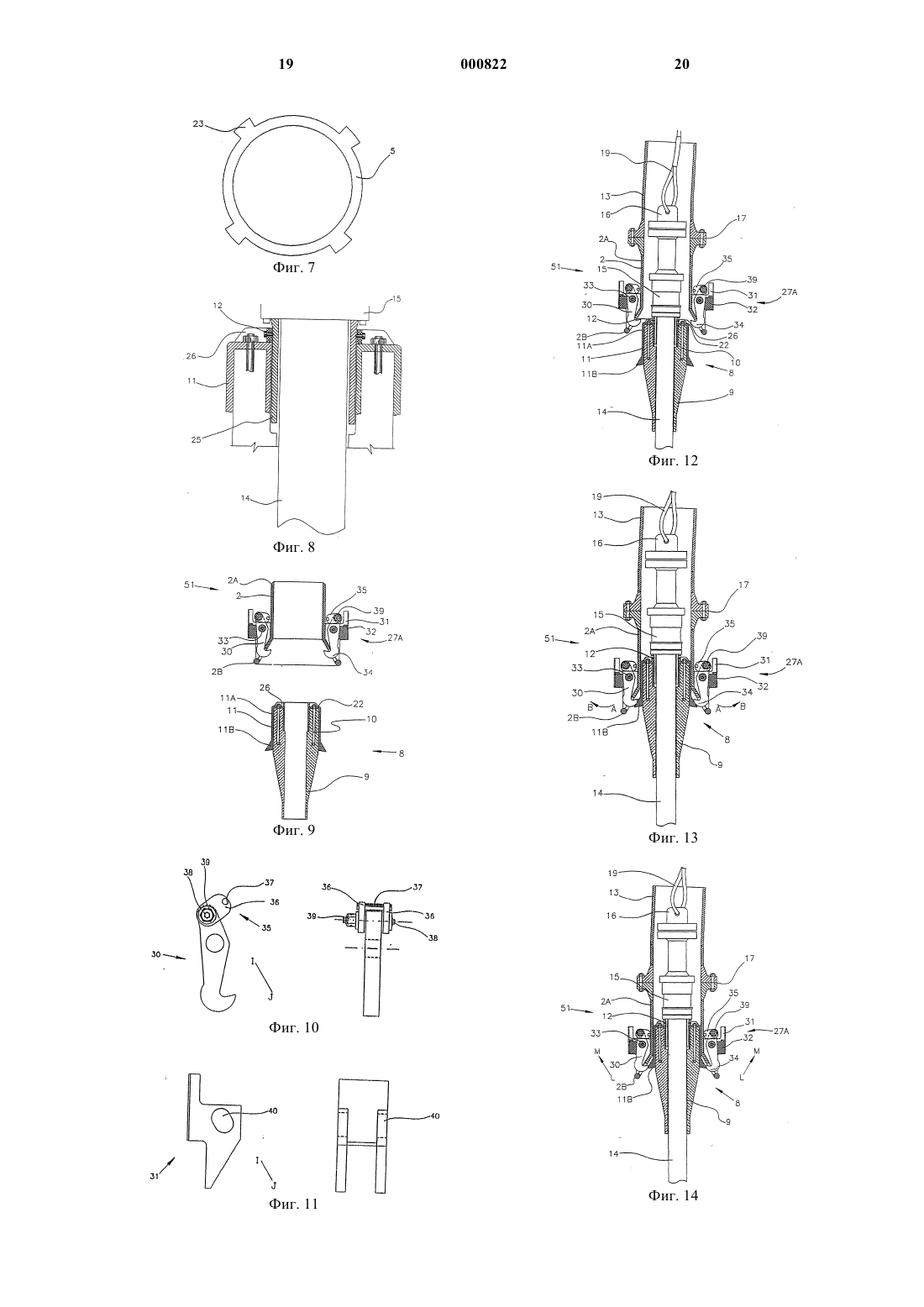
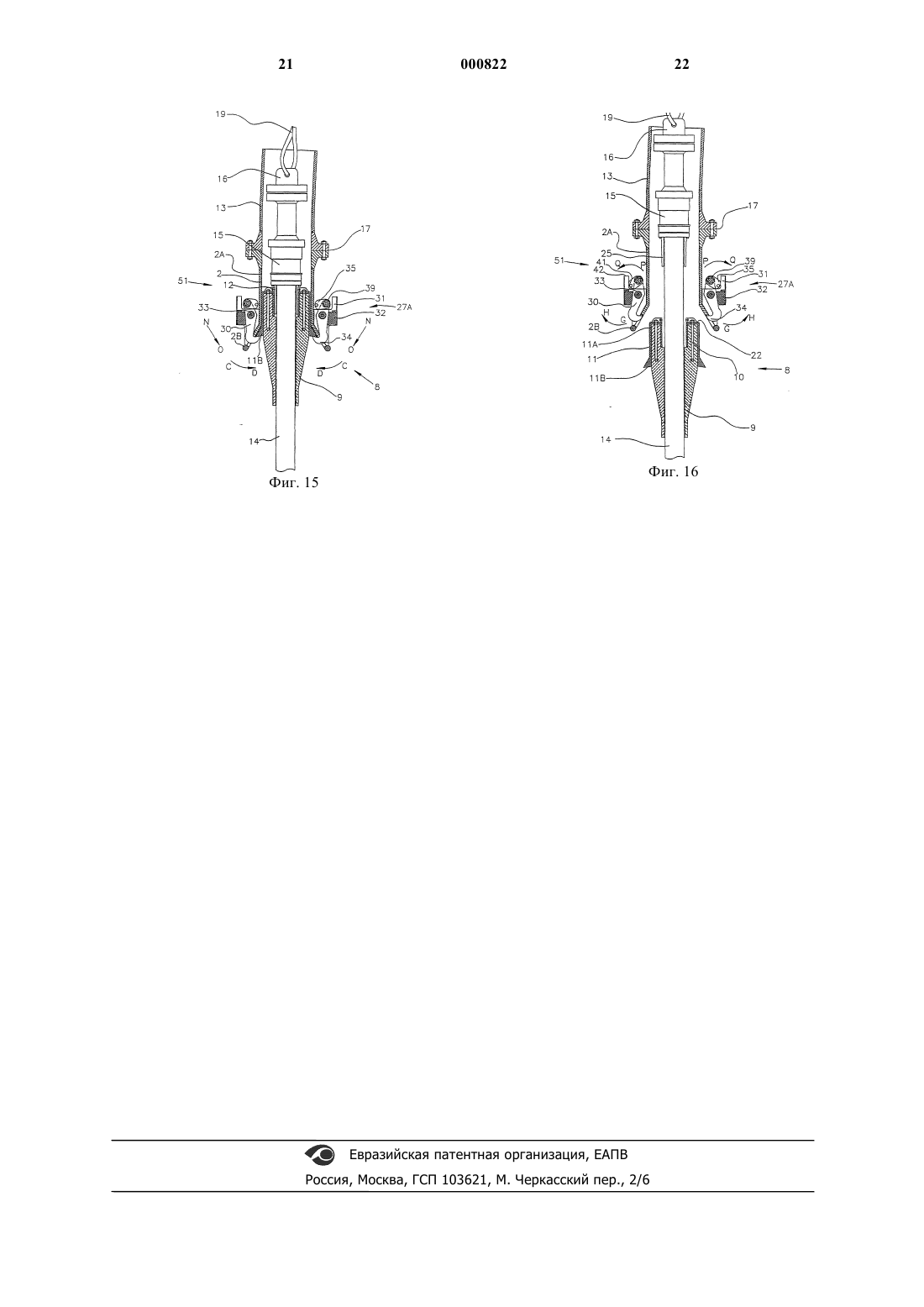
1 Настоящее изобретение имеет отношение к созданию устройства и способа, которые позволяют облегчить подключение подводных гибких стояков, идущих с морского дна, к конструкции(оборудованию) на поверхности. Задачей настоящего изобретения является создание устройства и способа использования такого устройства, которые позволяют непосредственно соединять концы гибких трубопроводов, идущих с морского дна, с приемными конструкциями в любом месте над поверхностью моря. Открытие продуктивных углеводородных месторождений на все больших глубинах в море приводит к использованию жестких конструкций, установленных на морском дне и предназначенных для монтажа оборудования для ведения добычи, которые становятся все более дорогостоящими. В некоторых случаях, принимая во внимание особые условия региона, в котором расположено углеводородное месторождение,использование таких конструкций не обеспечивает достаточную надежность. Не так давно увеличилось использование плавучих конструкций в качестве альтернативы стационарным конструкциям, предназначенным для монтажа оборудования для ведения добычи,так как они обычно дешевле таких стационарных конструкций. Другим преимуществом, которое также следует принимать во внимание, является возможность использования существующих плавучих конструкций, которые в относительно малый промежуток времени могут быть приспособлены для приема (монтажа) оборудования для ведения добычи, в результате чего относительно быстро может быть начата добыча в углеводородном месторождении при относительно низкой стоимости. Это представляет собой одно из основных преимуществ использования плавучих конструкций, так как всегда существует возможность использования полупогружных платформ (морских оснований), а также судов и плавсредств другого типа, которые могут быть приспособлены для установки на них оборудования для ведения добычи, в результате чего существенно снижаются начальные капвложения, требующиеся для освоения месторождения, причем стоимость такого приспособления существенно ниже стоимости изготовления стационарной конструкции. Однако при использовании плавучих конструкций для установки на них оборудования для ведения добычи возникает ряд проблем. Первая из них связана с сохранением определенного положения такой конструкции в данном местоположении. Использованная система добычи должна гарантировать сохранение идеального положения такой конструкции, хотя и с возможностью допущения незначительных виб 000822 2 раций, вызванных морскими и атмосферными условиями. После решения указанной проблемы возникают трудности, связанные с системой соединения гибких линий, идущих с морского дна, с плавучей конструкцией. Такие линии, известные специалистам как "стояки", могут представлять собой, например, трубопроводы для перемещения углеводородов, гидравлические линии или электрические кабели, а также их комбинацию. Уже предложены различные технологии для облегчения присоединения стояков к плавучей конструкции. При некотором упрощении эти технологии могут быть подразделены на две основные категории:- в первую категорию могут быть включены такие технологии, которые облегчают подключение стояков к некоторой точке на плавучей конструкции, расположенной ниже поверхности моря;- во вторую категорию могут быть включены такие технологии, которые облегчают подключение стояков к некоторой точке на плавучей конструкции, расположенной выше поверхности моря. Основная проблема, которая возникает при использовании упомянутой выше первой группы технологий, связана главным образом с необходимостью использования водолазов или,альтернативно, оборудования с дистанционным управлением, для осуществления соединительной операции (операций). Эта операция является достаточно тонкой и чрезвычайно важной,так как любой отказ может приводить к возникновению ситуаций высокой степени риска для оборудования в целом и для команды на борту плавучей конструкции. Во второй группе технологий указанная проблема устранена, так как стояк транспортируют к определенной точке на плавучей конструкции, расположенной выше морской поверхности, где операция соединения (подключения) может быть проведена с большей безопасностью и с использованием специализированного персонала. Однако и здесь существует ряд требующих разрешения проблем. Тот факт, что стояк должен быть присоединен к плавучей конструкции в определенном местоположении выше морской поверхности,сам по себе создает серьезную проблему. Обычная морская зыбь побуждает стояки существенно перемещаться по причине свойственной им гибкости. В таком случае существует тенденция частого касания стояками некоторых частей плавучей конструкции, что может приводить к серьезному повреждению внешней оболочки стояков. Чтобы избежать возникновения такой ситуации обычно стараются устанавливать стояки на относительно большом расстоянии от плавучей конструкции. 3 Однако такое решение создает серьезное ограничение для использования указанных технологий, так как в зависимости от имеющегося на плавучей конструкции пространства для размещения точек соединения можно прийти к крайней ситуации, в которой не хватает места для подключения желательного числа стояков. Уже предложен ряд решений этой проблемы. В патенте США US-A-4,808,034 предлагается использовать направляющее кольцо с двумя направляющими стойками, к которым крепятся два троса (кабеля). Внутри направляющего кольца имеется зона выреза, в которую вводят соединитель стояка. Создающий изгиб (изгибающий) элемент жесткости установлен непосредственно под направляющим кольцом(ниже него). При осуществлении на плавучей конструкции операции подъема тросов, закрепленных на направляющих стойках направляющего кольца, соединитель стояка сопровождает тросы. В результате стояк поднимается до уровня плавучей конструкции. В некоторой точке ниже поверхности моря направляющее кольцо упирается в приемный фланец, который содержит две направляющие трубы, в которых заключены тросы, закрепленные на направляющих стойках направляющего кольца. Эти направляющие трубы также играют роль приемников для направляющих стоек направляющего кольца. Приемный фланец соединен с направляющей трубой, которая надежно закреплена на плавучей конструкции. Когда направляющие стойки направляющего кольца входят в направляющие трубы приемного фланца, тогда соединитель стояка начинает подниматься в точку соединения, которая расположена в некоторой части плавучей конструкции выше морской поверхности. Для осуществления указанной операции трос должен быть предварительно прикреплен к соединителю стояка, который позволяет протолкнуть весь блок внутрь направляющей трубы до точки соединения. Указанная труба предотвращает передачу стояку естественного волнения моря. Указанное решение представляет собой значительный прогресс по сравнению с системами для соединения подводных стояков. Однако использование различных направляющих тросов для подъема направляющего кольца и соединителя стояка может создавать проблему,принимая во внимание необходимость достижения идеальной синхронизации движения втягивания направляющих тросов, так как в противном случае всегда существует вероятность того,что один направляющий трос будет в какой-то момент времени двигаться быстрее, чем другой трос, что может приводить к выводу стояка из его исходного положения внутри направляющего кольца, с серьезными последствиями для успешного выполнения операции соединения. 4 В патенте США US-A-5,437,518 раскрыто устройство для монтажа подводной гибкой линии (трубопровода) на плавучей конструкции. Устройство включает в себя полый жесткий элемент, через который проходит гибкая линия,после того, как она была протянута при помощи протягивающего троса, закрепленного на одном ее конце для присоединения к плавучей конструкции, и ограничитель кривизны, входящий в контакт с гибкой линией и закрепленный на средстве фиксации (крепления), имеющим возможность взаимодействия с другим средством фиксации, закрепленным на полом жестком элементе для постоянного крепления ограничителя кривизны на плавучей конструкции. Это хорошее решение, однако, его недостатком является постоянное крепление ограничителя кривизны на плавучей конструкции. Более того, так как использование скользящих продольно стопорных защелок в качестве средства крепления ограничителя кривизны не является надежным,то требуется второе средство для надежного крепления ограничителя кривизны на плавучей конструкции. Задачей настоящего изобретения является устранение указанной проблемы за счет создания стояка, который может быть поднят при помощи единственного троса, в результате чего операция соединения становится более безопасной. Кроме того, упрощение операции позволяет существенно сократить время подъема и соединения гибких стояков. Настоящее изобретение имеет отношение к созданию устройства и способа, которые позволяют облегчить подключение подводного гибкого стояка, идущего с морского дна, в некоторой точке над морской поверхностью, локализованной на конструкции, расположенной на поверхности. Устройство в соответствии с настоящим изобретением главным образом включает в себя два основных компонента: направляющее устройство и соединительное устройство. Соединительное устройство включает в себя направляющую и, не обязательно, создающий изгиб элемент жесткости, которые подключены при помощи соединительных элементов. Характеристики изобретения будут ясны из последующего детального описания, приведенного со ссылкой на сопроводительные чертежи, данные исключительно в качестве примера и являющиеся его неотъемлемой частью. На фиг. 1 показаны компоненты первого варианта осуществления устройства для подключения гибкого стояка в соответствии с настоящим изобретением; на фиг. 2 показан гибкий стояк, подключенный к устройству в соответствии с первым вариантом, в положении, близком к началу операции введения в контакт (сочленения) его основных компонентов; 5 на фиг. 3 показан гибкий стояк, подключенный к устройству в соответствии с первым вариантом, в положении непосредственно перед началом входа в контакт его основных компонентов; на фиг. 4 показан гибкий стояк, подключенный к устройству в соответствии с первым вариантом, уже в фазе подъема, в положении непосредственно после входа в контакт его основных компонентов; на фиг. 5 показаны основные компоненты первого варианта, которые уже вступили в контакт, а также показан гибкий стояк в фазе подъема; на фиг. 6 показаны основные компоненты первого варианта в фазе разъединения; на фиг. 7 показано стопорное кольцо, которое используется в первом варианте устройства в соответствии с настоящим изобретением; на фиг. 8 показана деталь крепления трубы к соединительному устройству, которая представляет собой один из основных компонентов первого варианта устройства в соответствии с настоящим изобретением; на фиг. 9 показаны компоненты второго варианта осуществления устройства для подключения гибкого стояка в соответствии с настоящим изобретением; на фиг. 10 детально показано стопорное устройство второго варианта осуществления устройства в соответствии с настоящим изобретением; на фиг. 11 детально показана опора стопорного устройства второго варианта осуществления устройства в соответствии с настоящим изобретением; на фиг. 12 показан гибкий стояк, подключенный к устройству в соответствии со вторым вариантом, в положении, близком к началу операции введения в контакт его основных компонентов; на фиг. 13 показан гибкий стояк, подключенный к устройству в соответствии со вторым вариантом, в положении начала операции введения в контакт его основных компонентов; на фиг. 14 показан гибкий стояк, подключенный к устройству в соответствии со вторым вариантом, в положении непосредственно перед началом входа в контакт его основных компонентов; на фиг. 15 показан гибкий стояк, подключенный к устройству в соответствии со вторым вариантом, уже в фазе подъема, в положении непосредственно после входа в контакт его основных компонентов; на фиг. 16 показаны основные компоненты второго варианта в фазе разъединения. Обратимся теперь к рассмотрению фиг. 1,на которой показан первый вариант осуществления устройства для подключения подводного гибкого стояка к оборудованию на морской поверхности, причем указанное устройство вклю 000822 6 чает в себя главным образом две части: направляющее устройство 1 и соединительное устройство 8. Направляющее устройство 1 включает в себя главным образом корпус 2, верхняя часть 2 А которого имеет форму цилиндра, а нижняя часть 2 В имеет форму усеченного конуса. Стопорный механизм 27 закреплен на корпусе 2,причем его компонентами являются стопорное кольцо 5, втулка разблокирования 6, направляющий элемент 7, опоры 20, стопорные средства (в данном случае защелки) 3 и упругие элементы 4. Направляющий элемент 7 и опоры 20 надежно закреплены на корпусе 2. Стопорные защелки 3 установлены с возможностью поворота на опорах 20 при помощи пальцев 18, которые надежно закреплены на опорах 20. Нижняя часть каждой стопорной защелки 3, которая имеет форму зуба 21, может входить внутрь щелей в нижней части 2 В корпуса. Как это будет объяснено далее, движение поворота стопорных защелок 3 ограничено и достаточно только для выполнения функции, для которой они предназначены. Внутри опор 20 имеются упругие элементы 4, функцией которых является удержание соответствующей стопорной защелки 3 в положении стопорения (запирания, блокировки), как это показано на фиг. 1, что будет более понятно из приведенного далее описания способа. Функцией стопорного кольца 5 является удержание стопорных защелок 3 в положении запирания, после подключения соединительного устройства 8 к направляющему устройству 1,для того, чтобы предотвратить после завершения операции соединения разблокирование соединительного устройства 8 под воздействием любых возможных вибраций или перемещений. На фиг. 7 стопорное кольцо показано более подробно. Как станет ясно из описания способа использования устройства в соответствии с настоящим изобретением, стопорное кольцо 5 может быть повернуто, в случае необходимости,относительно его оси, причем такой поворот определяет положение выступов 23, которые предназначены для блокировки соответствующих стопорных защелок 3, о чем говорилось ранее. На фиг. 1 показано также соединительное устройство 8, которое включает в себя направляющую 11 и элементы крепления 10, которые в данном варианте соединены с создающим изгиб элементом жесткости 9. Этот компонент обычно используется на стояках, причем он локализован на том конце, который будет соединен с плавучей конструкцией. Функцией элемента жесткости 8 является придание большей жесткости концу стояка и предотвращение образования любых складок, которые могли бы привести к разрыву оболочки. Однако этот компонент не является частью настоящего изобретения и он упомянут здесь по той причине, что он является 7 важным переходным элементом между подводными гибкими стояками и устройством в соответствии с настоящим изобретением, что будет понятно из последующего описания. Нижняя часть 11 В направляющей имеет форму усеченного конуса. Верхняя часть 11 А направляющей имеет форму цилиндра и полностью охватывает верхнюю часть создающего изгиб элемента жесткости 9. Эта верхняя часть 11 А направляющей имеет крышку 22 с отверстием, помещенную над концом создающего изгиб элемента жесткости 9. Втулка 26 закреплена на крышке 22 с отверстием. Крепежные элементы 10 предназначены для крепления создающего изгиб элемента жесткости 9 на крышке 22 направляющей 11. На фиг. 2 показан корпус 2 направляющего устройства 1, надежно подключенного в его верхней части к соединительному устройству 17, которое, в свою очередь, подключено к нижней части переходной трубы 13, которая идет до точки на плавучей конструкции, расположенной выше поверхности моря, что на фиг. 2 не показано. Следует иметь в виду, что соединительное устройство 17 и переходная труба 13 не являются интегральной частью настоящего изобретения и показаны только для облегчения понимания сути изобретения. На фиг. 2 показан также подводный гибкий стояк 14, установленный внутри соединительного устройства 8. Именно этот гибкий стояк должен быть поднят до соответствующей точки соединения с конструкцией, расположенной над поверхностью моря. Конец подводного гибкого стояка 14 подключен к конечному соединению 15, которое, в свою очередь, подключено к тяговой головке 16. И в этом случае указанные два компонента не являются интегральной частью настоящего изобретения и показаны только для облегчения понимания сути изобретения. Для того чтобы лучше понять процесс закрепления на соединительном устройстве 8 блока, образованного подводным гибким стояком 14, с конечным соединением 15 и тяговой головкой 16, следует одновременно рассматривать фиг. 2 и 8, так как на фиг. 8 подробно показана область, в которой происходит крепление. Конечное соединение 15 содержит крепежную трубу 25, введенную внутрь соединительного устройства 8 и охватывающую подводный гибкий стояк 14. Срезные штифты 12 гарантируют крепление блока, образованного подводным гибким стояком 14, конечным соединением 15 и тяговой головкой 16 на втулке 26 соединительного устройства 8. В соответствии с данным вариантом срезные штифты 12 обеспечивают крепление трубы 25 с посадкой с натягом, при этом их контактные концы образуют окружность, диаметр которой меньше внешнего диаметра крепежной трубы 25. Однако могут быть применены и другие средства крепления, такие как клеевое или резь 000822 8 бовое, причем описанные здесь средства крепления ни в коей мере не носят характера, ограничивающего настоящее изобретение. Обратимся вновь к рассмотрению фиг. 2,на которой показано, что тяговая головка 16 прикреплена к тросу 19, который пропущен внутри переходной трубы 13 и присоединен к некоторому тяговому средству, установленному на конструкции, которая на фиг. 2 не показана. При помощи троса 19 производится операция подъема гибкого стояка до точки его соединения с конструкцией, известная специалистам как "втягивание". Следует иметь в виду, что в качестве меры предосторожности для подъема блока могут быть применены несколько тросов 19, что позволяет избежать возможных разрывов. На фиг. 2 показано устройство в соответствии с первым вариантом осуществления настоящего изобретения, в положении, близком к началу операции введения в контакт (сочленения) его основных компонентов. Далее именно с этой точки будет начато описание способа использования устройства в соответствии с указанным первым вариантом. Следует иметь в виду, что выступы 23 стопорного кольца 5 на фиг. 2 не видны. Это происходит потому, что стопорное кольцо 5 ранее было повернуто на небольшой угол, чтобы его выступы 23 не мешали повороту стопорных защелок 3 относительно оси пальцев 18. Стопорное кольцо 5 может быть повернуто при помощи водолаза или, альтернативно, при помощи любого оборудования, такого как транспортное средство с дистанционным управлением (ROV),которое способно осуществить эту функцию. При продолжении операции подъема нижняя часть 2 В корпуса действует как направляющая и обеспечивает отличное сочленение направляющей 11 соединительного устройства 8 с корпусом 2 направляющего устройства 1, как это показано на фиг. 3. Верхняя часть 11 А направляющей вдвигается внутрь верхней части 2 А корпуса до тех пор, пока нижняя часть 11 В направляющей 11, которая имеет форму усеченного конуса, не коснется зубьев 21 стопорных защелок 3. Начиная с этого момента зубья 21 выдвигаются (выталкиваются) наружу в направлении,показанном стрелками АВ на фиг. 3, что побуждает стопорные защелки 3 поворачиваться относительно пальцев 18, так как выступы 23 стопорного кольца 5 больше не препятствуют этому повороту. Как только нижняя часть 11 В направляющей 11 проходит выше зубьев 21, они прижимаются при помощи упругих элементов 4 в направлении к корпусу 2, как это показано стрелками CD на фиг. 4. По завершении этого перемещения соединительное устройство 8 стопорится (блокируется), так как нижняя часть 11 В направляющей 11 соединительного устройства 8 9 препятствует дальнейшему подъему блока и,более того, зубья 21 стопорных защелок 3 не позволяют блоку опуститься. После этого поворачивают стопорное кольцо 5 так, что его выступы 23 вновь предотвращают возможность поворота соответствующих стопорных защелок 3 относительно оси пальцев 18. Вытягивание вверх троса 19 продолжается и в определенный момент времени срезные штифты 12 разрываются, что позволяет блоку,образованному тяговой головкой 16, конечным соединением 15 и подводным гибким стояком 14, отделиться от соединительного устройства 8,как это показано на фиг. 5. При продолжении операции подъема при помощи троса 19 указанный выше блок поднимается до точки конструкции, не показанной на фиг. 5, в которой будет подключен подводный гибкий стояк 14, при этом операция соединения будет завершена. Когда возникает необходимость разъединения соединительного устройства 8 для извлечения подводного гибкого стояка 14, сначала следует повернуть стопорное кольцо 5 так, чтобы его выступы 23 не препятствовали повороту соответствующих стопорных защелок 3 относительно пальцев 18. После этого втулку разблокирования 6 перемещают по оси в направлении стрелки EF, показанной на фиг. 6. Осевое перемещение втулки разблокирования 6 обеспечивается при помощи направляющего элемента 7, который в соответствии с настоящим изобретением имеет винтовую щель,входящую в зацепление с втулкой разблокирования 6, так что вращение этой втулки 6 водолазом или при помощи любого оборудования, такого как транспортное средство с дистанционным управлением (ROV), которое способно осуществить эту функцию, создает перемещение в направлении стрелки EF. Однако осевое перемещение втулки разблокирования 6 может быть обеспечено и при помощи иных подходящих средств, так что приведенное ранее описание, в котором показано, как направляющий элемент 7 приводит в движение втулку разблокирования 6, не следует рассматривать как ограничивающее настоящее изобретение. При входе в контакт с головками 24 на стопорных защелках 3 втулка разблокирования 6 побуждает их поворачиваться относительно оси пальцев 18 в направлении стрелки GH, что означает, что зубья 21 не удерживают больше соединительное устройство 8 внутри направляющего устройства, а это позволяет произвести извлечение подводного гибкого стояка 14. На фиг. 9 показан альтернативный вариант стопорного механизма 27 А направляющего устройства 51, входящего в устройство для подключения подводного гибкого стояка к оборудованию на морской поверхности. Стопорный механизм 27 А закреплен на корпусе 2, причем его компонентами являются опоры 31, стопор 000822 10 ные защелки 30, упругие элементы 32, пальцы 33 и средства ограничения перемещения 35. Опоры 31 надежно закреплены на корпусе 2, а стопорные защелки 30 и упругие элементы 32 закреплены на указанных опорах. Стопорные защелки 30 закреплены на опорах 31 при помощи пальцев 33. Нижняя часть каждой стопорной защелки 30, которая имеет форму зуба 34, может входить внутрь щели в нижней части 2 В корпуса 2. На верхней части каждой стопорной защелки 30 предусмотрено средство ограничения перемещения 35. На фиг. 10 и 11 показаны более крупно соответственно стопорная защелка 30 и опора 31. Как это показано на фиг. 10, средство ограничения перемещения 35 включает в себя две пластины 36, которые скреплены вместе при помощи соединительного элемента 37. Средство ограничения перемещения 35 закреплено на стопорной защелке 30 при помощи штифта 38, который имеет на одном из своих концов исполнительный элемент 39. Компоненты блока, образованного средством ограничения перемещения 35, исполнительным элементом 39 и штифтом 38, надежно подогнаны друг к другу так,что вращение исполнительного элемента 39 относительно штифта 38 приводит во вращение весь блок. Как это показано на фиг. 10 и 11, стопорные защелки 30 установлены на опорах 31 таким образом, что в дополнение к вращательному движению вокруг осей пальцев 33, они могут перемещаться прямолинейно в направлении IJ,показанном на фиг. 10 и 11, что станет более понятно из последующего описания. Это прямолинейное движение возможно по причине удлиненной формы щели 40 в боковой части опоры 31. Как будет понятно из последующего описания, путь вращательного и прямолинейного перемещения стопорных защелок 30 ограничен и достаточен только для выполнения функции, для которой они предназначены. Как это показано на фиг. 9, внутри опор 31 предусмотрены упругие элементы 32, функцией которых является удержание стопорной защелки 30 в положении блокировки, что также будет понятно из последующего описания. Операции способа использования устройства в соответствии с данным вариантом в основном аналогичны описанным для предшествующего варианта. Поэтому будет приведено описание только тех операций, которые отличаются от описанных ранее. На фиг. 12 показано устройство в соответствии со вторым вариантом, в положении, близком к началу операции сочленения (введения в контакт) его основных компонентов. При продолжении операции подъема нижняя часть 2 В корпуса действует как направляющая, обеспечивая идеальное сочленение соединительного устройства 8 с направляющим устройством 51, как это показано на фиг. 13. Верх 11 няя часть 11 А направляющей вдвигается внутрь верхней части 2 А корпуса до тех пор, пока нижняя часть 11 В направляющей 11, которая имеет форму усеченного конуса, не коснется зубьев 34 стопорных защелок 3. Начиная с этого момента зубья 34 выдвигаются (выталкиваются) наружу в направлении,показанном стрелками АВ на фиг. 13, что побуждает стопорные защелки 30 поворачиваться относительно осей пальцев 33 до тех пор, пока средство ограничения перемещения 35 не остановит поворот стопорных защелок 30, как это показано на фиг. 14. Начиная с этого момента компонент контактного усилия между нижней частью 11 В направляющей 11 и зубьями 34 стопорной защелки 30 побуждает соответствующую защелку перемещаться в направлении стрелок LM (фиг. 14), по причине соответствующей формы щели 40 в опоре 31, показанной на фиг. 11; это обеспечивает полное прохождение направляющей 11 и, следовательно, соединительного устройства 8 в направляющее устройство 51 до положения, показанного на фиг. 15. Как только нижняя часть 11 В направляющей 11 проходит выше зубьев 34 (мимо них, по другую сторону от них), они прижимаются при помощи упругих элементов 32 в направлении к корпусу 2, как это показано стрелками CD на фиг. 15. В дополнение к этому перемещению стопорные защелки 30 перемещаются в направлении стрелки NO под действием веса соединительного устройства 8. По завершении этого перемещения соединительное устройство 8 стопорится (блокируется), так как нижняя часть 11 В направляющей 11 соединительного устройства 8 препятствует дальнейшему подъему блока и, более того, зубья 34 стопорных защелок 30 не позволяют блоку опуститься. Геометрия средства ограничения перемещения 35 предотвращает возможность поворота соответствующих стопорных защелок 30 вокруг осей пальцев 33, достаточного для освобождения соединительного устройства 8. Начиная с этого момента повторяют операции способа, описанного для предшествующего варианта, до тех пор, пока не будет обеспечено надлежащее присоединение подводного гибкого стояка 14 в точке конструкции, предназначенной для этого; на этом операция соединения завершается. Как это показано на фиг. 16, когда необходимо разъединить соединительное устройство 8 для извлечения подводного гибкого стояка 14, к исполнительному элементу 39 сначала нужно присоединить инструмент и приложить к нему момент, который создает вращение средства ограничения перемещения 35 в направлении стрелки PQ. При этом средство ограничения перемещения 35 поворачивается до тех пор, пока его конец 41 не коснется стойки 42 опоры 31. Продолжающееся приложение к исполнитель 000822 12 ному элементу 39 момента будет побуждать стопорную защелку 30 поворачиваться относительно оси ее пальца 33 в направлении стрелкиGH, а это означает, что зубья 34 не удерживают более соединительное устройство 8 внутри направляющего устройства, что облегчает извлечение подводного гибкого стояка 14. Следует иметь в виду, что описанные варианты отражают только некоторые возможности использования базовых концепций настоящего изобретения, облегчающих подключение поднимаемого гибкого стояка к любой точке плавучей конструкции, расположенной над поверхностью моря, при помощи только одного направляющего троса. Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в них специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят, однако, за рамки приведенной далее формулы изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для подключения подводного гибкого стояка к конструкции на поверхности, причем указанный подводный гибкий стояк(14) имеет конечное соединение (15), закрепленное на его соединительном конце, и тяговую головку (16), подключенную к указанному конечному соединению (15), при этом указанное устройство включает в себя соединительное устройство (8), закрепленное на одном конце подводного гибкого стояка (14), и направляющее устройство (1; 51), которое содержит направляющее средство (2 В) и стопорное средство(27; 27 А) для блокировки соединительного устройства (8), когда соединительное устройство поднято с морского дна при помощи, по меньшей мере, одного троса (19), так, что когда осуществлена блокировка соединительного устройства (8) на направляющем устройстве (1; 51),тогда соединительный конец подводного гибкого стояка (14) может продолжать подниматься за счет тяги троса (19) до любой точки на конструкции, которая расположена на поверхности моря, в которой будет осуществлено подключение подводного гибкого стояка (14), отличающееся тем, что устройство включает в себя исполнительное средство (6, 24; 39) для разблокирования указанного стопорного средства (27; 27 А), предназначенное для разъединения соединительного устройства (8) от направляющего устройства (1; 51). 2. Устройство по п.1, отличающееся тем,что соединительное устройство (8) имеет направляющую (11), верхняя часть (11 А) которой имеет форму цилиндра, а нижняя часть (11 В) которой имеет форму усеченного конуса. 3. Устройство для подключения подводного гибкого стояка к конструкции на поверхности, причем указанный подводный гибкий стояк(14) имеет конечное соединение (15), закрепленное на его соединительном конце, и тяговую головку (16), подключенную к указанному конечному соединению (15), при этом указанное устройство включает в себя соединительное устройство (8), закрепленное на одном конце подводного гибкого стояка (14), и направляющее устройство (1; 51), которое содержит направляющее средство (2 В) и стопорное средство(27; 27 А) для блокировки соединительного устройства (8), когда соединительное устройство поднято с морского дна при помощи, по меньшей мере, одного троса (19), так, что когда произведена блокировка соединительного устройства (8) на направляющем устройстве (1; 51), то тогда соединительный конец подводного гибкого стояка (14) может продолжать подниматься за счет тяги троса (19) до любой точки на конструкции, которая расположена на поверхности моря, в которой будет осуществлено подключение подводного гибкого стояка (14), отличающееся тем, что соединительное устройство (8) имеет направляющую (11), верхняя часть (11 А) которой имеет форму цилиндра, а нижняя часть(11 В) которой имеет форму усеченного конуса; и тем, что стопорный механизм (27; 27 А) содержит стопорные пластины, установленные с возможностью поворота на направляющем устройстве (1; 51) и имеющие форму, которая позволяет осуществлять их зацепление с имеющей вид усеченного конуса нижней частью (11 В) направляющей (11). 4. Устройство по п.3, отличающееся тем,что нижняя часть каждой стопорной защелки (3) выполнена в виде зуба (21) и может заходить внутрь щели в нижней части (2 В) корпуса (2) направляющего устройства (1; 51) для зацепления с имеющей вид усеченного конуса нижней частью (11 В) направляющей (11). 5. Устройство по одному из пп. 3 или 4,отличающееся тем, что стопорное средство (27) направляющего устройства (1), предназначенное для блокировки соединительного устройства (8), представляет собой стопорный механизм,который включает в себя стопорное кольцо (5),втулку разблокирования (6), направляющий элемент (7), опоры (20) и упругие элементы (4) для стопорных защелок (3), причем направляющий элемент (7) и опоры (20) надежно закреплены на корпусе (2), а осями поворота для стопорных защелок (3) являются пальцы (18), надежно закрепленные на опорах (20), при этом внутри опор (20) предусмотрены упругие элементы (4), функцией которых является удержание стопорных защелок (3) в положении блокировки, причем стопорное кольцо (5) предназначено для удержания соответствующей стопорной защелки (3) в положении блокировки, после сочленения соединительного устройства (8) с направляющим устройством (1), чтобы предотвратить, после завершения операции соединения, разблокирование соединительного устрой 000822 14 ства (8) за счет любых возможных вибраций или перемещений. 6. Устройство по одному из пп.3 или 4, отличающееся тем, что стопорное средство направляющего устройства (51), предназначенное для блокировки соединительного устройства (8),представляет собой стопорный механизм (27 А),который включает в себя опоры (31) для стопорных защелок (30), упругие элементы (32),пальцы (33) и средства ограничения перемещения (35), причем стопорные защелки (30) закреплены на опорах (31) при помощи пальцев (33),а средства ограничения перемещения (35) установлены на верхней части стопорных защелок(30), при этом стопорные защелки (30) установлены на опорах (31) так, что они могут поворачиваться вокруг осей пальцев (33) и перемещаться поперечно наклонно относительно оси симметрии корпуса (2), причем в нижней части опор (31) установлены упругие элементы (32),функцией которых является удержание стопорных защелок (30) в положении блокировки, после сочленения соединительного устройства (8) с направляющим устройством (51), чтобы предотвратить после завершения операции соединения разблокирование соединительного устройства (8) за счет любых возможных вибраций или перемещений. 7. Устройство по одному из пп.1-4, отличающееся тем, что соединительный конец подводного гибкого стояка (14) заключен в создающий изгиб элемент жесткости (9). 8. Устройство по одному из пп.1-4, отличающееся тем, что соединительный конец подводного гибкого стояка (14) закреплен на соединительном устройстве (8) при помощи срезных штифтов (12). 9. Устройство по одному из пп.1-4, отличающееся тем, что направляющее средство направляющего устройства (1; 51), предназначенное для задания направления соединительного устройства (8), содержит корпус (2), верхняя часть (2 А) которого имеет форму цилиндра, а нижняя часть (2 В) которого имеет форму усеченного конуса, причем нижняя часть (2 В) действует как буфер для нижней части (11 В) корпуса (11) соединительного устройства (8). 10. Способ использования устройства по п.5 для подключения подводного гибкого стояка к конструкции на поверхности, отличающийся тем, что он включает в себя следующие операции:- первоначальное приложение движения вращения к стопорному кольцу (5) стопорного механизма (27) таким образом, чтобы выступы(23) стопорного кольца (5) не мешали движению поворота стопорных защелок (3) вокруг осей пальцев (18), закрепленных на опорах (20), которые соединены с корпусом (2) направляющего устройства (1);- последующее приложение тягового усилия к тросу (19), соединенному с тяговой голов 15 кой (16), которая, в свою очередь, соединена с конечным соединением (15), соединенным с подводным гибким стояком (14), идущим с морского дна, соединительный конец которого закреплен на соединительном устройстве (8);- продолжение движения подъема, при котором нижняя часть (2 В) корпуса (2) направляющего устройства (1) действует как направляющая при прохождении направляющей (11) соединительного устройства (8) внутри корпуса(2) направляющего устройства (1), пока нижняя часть (11 В) направляющей (11) не коснется зубьев (21) стопорных защелок (3) стопорного механизма (27), причем в этот момент зубья (21) принудительно выдвигаются наружу из корпуса- принудительный поворот стопорных защелок (3) как только нижняя часть (11 В) направляющей (11) проходит выше зубьев (21) при помощи упругих элементов (4) в противоположном направлении, что побуждает зубья(21) стопорить блок, образованный соединительным устройством (8) и направляющим устройством (1);- разрыв при последующем приложении тягового усилия к блоку при помощи троса (19) срезных штифтов (12), крепящих соединительное устройство (8) к блоку, образованному подводным гибким стояком (14), конечным соединением (15) и тяговой головкой (16), после чего указанный блок поднимается до точки его крепления, расположенной в любом месте на конструкции;- при необходимости разъединения соединительного устройства (8) для извлечения подводного гибкого стояка (14), первоначальный поворот стопорного кольца (5) так, чтобы его выступы (23) не мешали более повороту стопорных защелок (3) относительно пальцев (18);- затем перемещение вниз втулки разблокирования (6), которая скользит по направляющему элементу (7), соединенному с корпусом- при входе в контакт с головками (24) стопорных защелок (3), принудительный поворот при помощи втулки разблокирования (6) стопорных защелок вокруг осей пальцев (18), что означает, что зубья (21) не стопорят больше соединительное устройство (8), что дает возможность соединительному устройству выступать изнутри направляющего устройства (1) с последующим освобождением подводного гибкого стояка (14). 11. Способ использования устройства по п.6 для подключения подводного гибкого стояка к конструкции на поверхности, отличающийся 16 тем, что он включает в себя следующие операции:- первоначальное приложение тягового усилия к тросу (19), соединенному с тяговой головкой (16), которая, в свою очередь, соединена с конечным соединением (15), соединенным с подводным гибким стояком (14), идущим с морского дна, соединительный конец которого закреплен на соединительном устройстве (8);- продолжение движения подъема, при котором нижняя часть (2 В) корпуса (2) направляющего устройства (51) действует как направляющая при прохождении направляющей (11) соединительного устройства (8) внутри корпуса(2) направляющего устройства (51), пока нижняя часть (11 В) направляющей (11) не коснется зубьев (34) стопорных защелок (30) стопорного механизма (27 А), причем в этот момент зубья(34) принудительно выдвигаются наружу из корпуса (2), пока средство ограничения перемещения (35) не коснется стоек (42) опор (31);- начиная с этого момента, при продолжении движения подъема, перемещение стопорных защелок (30) в наклонном направлении относительно осей симметрии корпуса (2), что позволяет зубьям (34) выступать над нижней частью (11 В) направляющей (11);- принудительный поворот, как только нижняя часть (11 В) направляющей (11) проходит выше зубьев (34), при помощи упругих элементов (32) стопорных защелок (30) в противоположном направлении, что побуждает зубья(34) стопорить блок, образованный соединительным устройством (8) и направляющим устройством (51);- при последующем приложении тягового усилия к блоку при помощи троса (19), разрыв срезных штифтов (12), крепящих соединительное устройство (8) к блоку, образованному подводным гибким стояком (14), конечным соединением (15) и тяговой головкой (16), после чего указанный блок поднимается до точки его крепления, расположенной в любом месте на конструкции;- при необходимости разъединения соединительного устройства (8) для извлечения подводного гибкого стояка (14), первоначальное приложение момента к исполнительным элементам (39), что означает, что зубья (34) выдвигаются наружу из корпуса (2), при этом зубья(34) не стопорят больше соединительное устройство (8), что дает возможность соединительному устройству выступать изнутри направляющего устройства (51) с последующим освобождением подводного гибкого стояка (14).
МПК / Метки
МПК: F16L 1/12, E21B 43/01
Метки: гибкого, конструкции, стояка, подключения, подводного, поверхности, способ, устройство
Код ссылки
<a href="https://eas.patents.su/12-822-ustrojjstvo-i-sposob-podklyucheniya-podvodnogo-gibkogo-stoyaka-k-konstrukcii-na-poverhnosti.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство и способ подключения подводного гибкого стояка к конструкции на поверхности</a>
Устройство для крепления стеневой панели на опорной конструкции
Номер патента: 272
Опубликовано: 25.02.1999
Автор: Рантакюля Кари
МПК: E04B 1/61, E04F 13/08
Метки: конструкции, стеневой, панели, опорной, крепления, устройство
Формула / Реферат:
1. Устройство для крепления на опорной конструкции (5) стеновой панели, включающей, по меньшей мере, внешний облицовочный слой (1) и теплоизоляцию (6), расположенную под вышеуказанным внешним облицовочным слоем, и имеющей, по меньшей мере, одну из кромок внешнего облицовочного слоя, по форме соответствующую элементу шпунтового соединения (7), служащего для соединения панели с соседней панелью, при этом указанное устройство для крепления включает...
Способ стерилизации поверхности предмета, устройство для его осуществления и установка для стерилизации бутылок
Номер патента: 597
Опубликовано: 29.12.1999
Автор: Сёгор Сёрен Петер
МПК: B65B 55/08
Метки: способ, бутылок, устройство, стерилизации, осуществления, установка, поверхности, предмета
Формула / Реферат:
1. Способ стерилизации поверхности предмета, выполненного из полимерного материала с заключительной обработкой горячей деформацией, такой как дутьевое формование или вакуумное формование, предусматривающий обработку высокочастотной электрической энергией, такой как микроволны, отличающийся тем, что - создают на предмете, по существу, непрерывную пленку жидкости путем нанесения на предмет жидкости, которая не отталкивается материалом, из...
Порошок с многослойной пленкой на его поверхности и способ его получения
Номер патента: 98
Опубликовано: 27.08.1998
Авторы: Атараси Такафуми, Накатсука Катсуто
МПК: C03C 17/34, B22F 1/02, C23C 18/52...
Метки: многослойной, способ, пленкой, поверхности, получения, порошок
Формула / Реферат:
1. Порошок с многослойной пленкой на его поверхности, который содержит исходные частицы с многослойной пленкой на них, отличающийся тем, что он содержит, по меньшей мере, одну пленку из окиси металла, образованную гидролизом алкоксида металла, обработанную нагреванием. 2. Порошок по п.1, отличающийся тем, что исходными частицами являются металлические частицы или частицы из соединения металла. 3. Порошок по п.1, отличающийся тем, что исходные...
Легкий элемент конструкции для строительства зданий и способ строительства зданий с его применением
Номер патента: 420
Опубликовано: 24.06.1999
Автор: Разль Иван
МПК: E04C 2/38
Метки: применением, легкий, строительства, способ, конструкции, элемент, зданий
Формула / Реферат:
1. Легкий элемент конструкции в форме панели, предназначенный для строительства зданий и имеющий опорную структуру с, по меньшей мере, двумя опорными балками, которые на их концах соединены между собой поперечинами, отличающийся тем, что между опорными балками (1) и поперечинами находится сердцевина (5) и/или поверхности опорных балок (1) соединены между собой клейкой несущей обшивкой (2), изготовленной из материала толщиной от 0,5 до 5 мм с...
Способ формирования покрытия на электопроводной поверхности и состав для формирования покрытия
Номер патента: 67
Опубликовано: 30.04.1998
Авторы: Джэнссон Роберт Ф.В., Кинлен Патрик Дж.
МПК: C25D 13/00, C09D 5/44
Метки: состав, электопроводной, способ, формирования, поверхности, покрытия
Формула / Реферат:
1. Способ формирования покрытия на электропроводной поверхности с использованием электроосаждаемого полимера, отличающийся тем, что он включает: (а) погружение электропроводной поверхности в водную ванну, содержащую электроосаждаемую на катоде смесь ионного от природы изолирующего полимера и соли органической кислоты от природы проводящего полимера, (b) приложение напряжения между электродом и поверхностью, действующей как катод в ванне для...
Предыдущий патент: Композиция на основе сои, используемая в качестве пищевой добавки или для снижения содержания липидов в сыворотке крови
Следующий патент: Устройство для обработки кускового материала
Случайный патент: Система и способ адаптивной модуляции