Система и способ управления возвратно-поступательным насосом
Формула / Реферат
1. Система управления для изменения скорости насосной штанги насосной установки, имеющей определенную геометрию и включающей электродвигатель с регулируемой частотой вращения и вращающееся плечо кривошипа, включающая:
(a) привод с переменной частотой для задания уставки скорости для электродвигателя;
(b) контроллер, функционально связанный с приводом переменной частоты, включающий средство вывода уставки скорости в соответствии с профилем скорости кривошипа; и
(c) процессор, включающий средство создания профиля скорости кривошипа и передачи профиля скорости кривошипа контроллеру.
2. Система по п.1, дополнительно включающая память, содержащую математическое представление геометрии насосной установки, в которой процессор включает средства для создания профиля скорости насосной штанги и средства преобразования профиля скорости насосной штанги в профиль скорости кривошипа.
3. Система по п.1 или 2, дополнительно включающая средства определения положения плеча кривошипа и его скорости.
4. Система по п.3, в которой средства определения включают бесконтактный датчик, связанный с плечом кривошипа, который детектирует периодическое прохождение плеча кривошипа и передает после него сигнал.
5. Система по п.4, в которой привод с переменной частотой включает средства, вырабатывающие опорное значение фактической скорости, которое передается средству определения.
6. Система по п.1, дополнительно включающая датчик определения крутящего момента двигателя и средство повышающего или понижающего регулирования профиля скорости кривошипа для увеличения или уменьшения крутящего момента двигателя.
7. Система по п.1, дополнительно включающая средство для создания фактического профиля скорости кривошипа по результатам определения положения и скорости кривошипа, средство преобразования фактического профиля скорости кривошипа в фактический профиль скорости насосной штанги и средство отображения на экране фактического профиля скорости кривошипа и/или насосной штанги.
8. Система по п.2, дополнительно включающая средство моделирования фактического профиля скорости кривошипа по требуемому профилю скорости кривошипа или насосной штанги и отображения на экране моделированного профиля скорости кривошипа.
9. Способ регулирования скорости насосной штанги насосной установки, имеющей определенную геометрию и включающей привод переменной частоты, электродвигатель с регулируемой частотой вращения и вращающееся плечо кривошипа, включающий следующие стадии:
(a) создание математической модели геометрии насосной установки;
(b) получение от пользователя профиля скорости насосной штанги или профиля скорости кривошипа;
(c) преобразование профиля скорости насосной штанги в профиль скорости кривошипа с помощью математической модели; и
(d) вывод на привод переменной частоты уставки скорости в соответствии с профилем скорости кривошипа.
10. Способ по п.9, дополнительно включающий стадию определения положения и скорости плеча кривошипа по опорному значению фактической скорости, генерируемому приводом с переменной частотой.
11. Способ по п.10, дополнительно включающий стадию установки в исходное положение плеча кривошипа при каждом его обороте с помощью бесконтактного переключателя, который детектирует прохождение плеча кривошипа и передает после этого сигнал.
12. Способ по п.9, дополнительно включающий стадию повышающего или понижающего регулирования профиля скорости кривошипа в зависимости от характеристик крутящего момента двигателя.
13. Способ по п.12, в котором профиль скорости кривошипа подвергается повышающему или понижающему регулированию в начале цикла, а не на протяжении цикла.
14. Способ по п.10, дополнительно включающий стадию создания и отображения на экране фактического профиля скорости кривошипа или насосной штанги по определенным значениям положения и скорости плеча кривошипа.

Текст
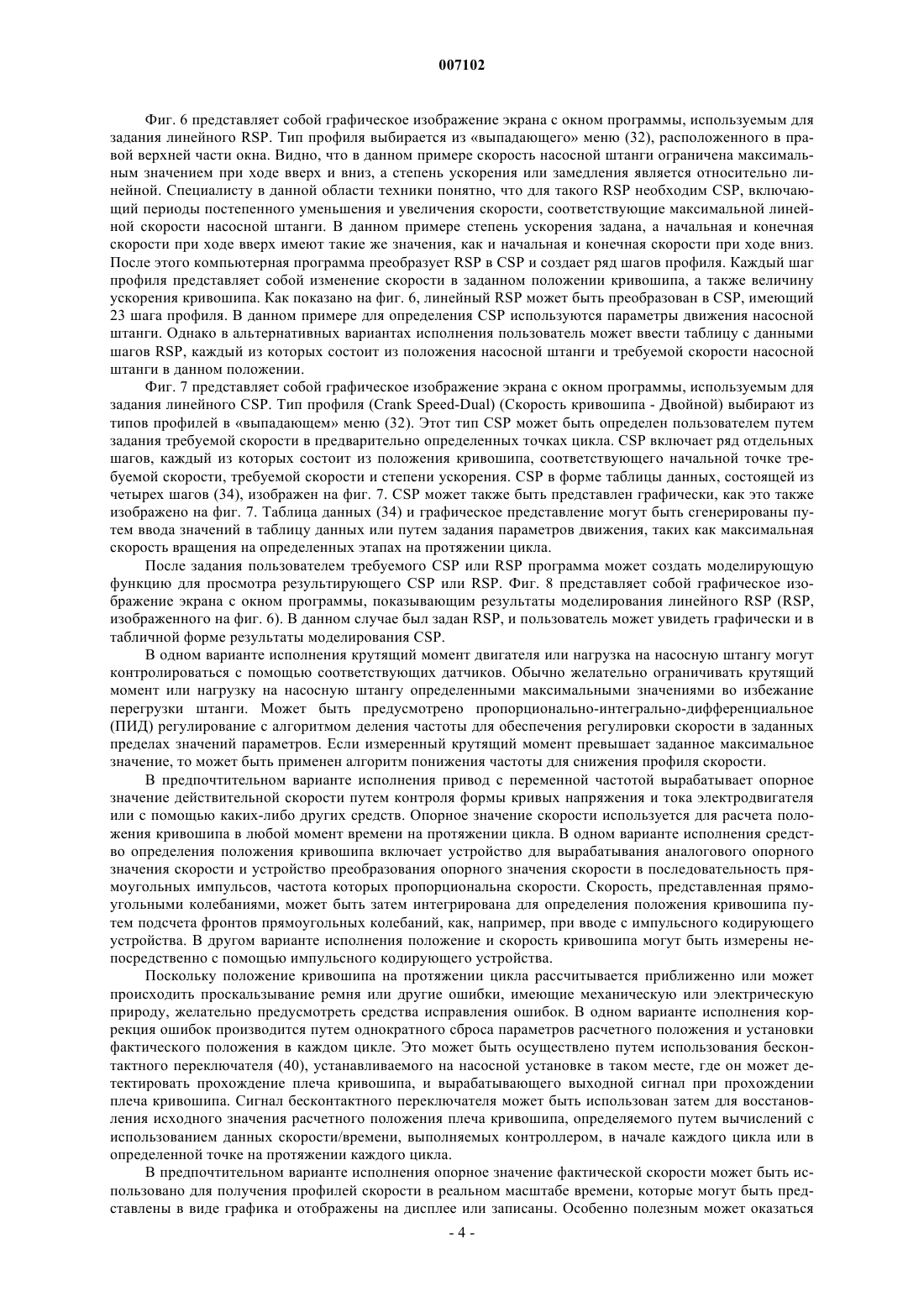
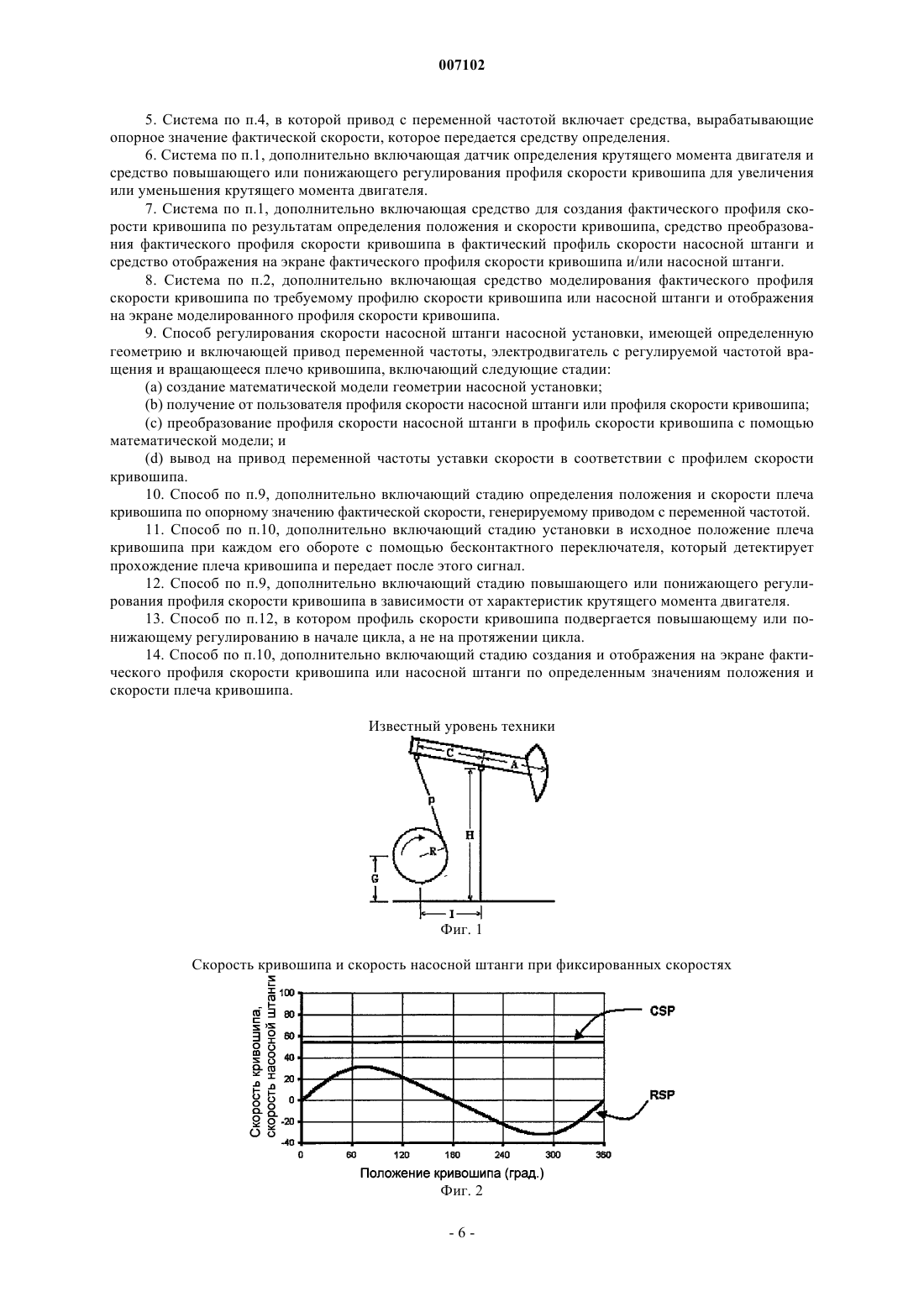
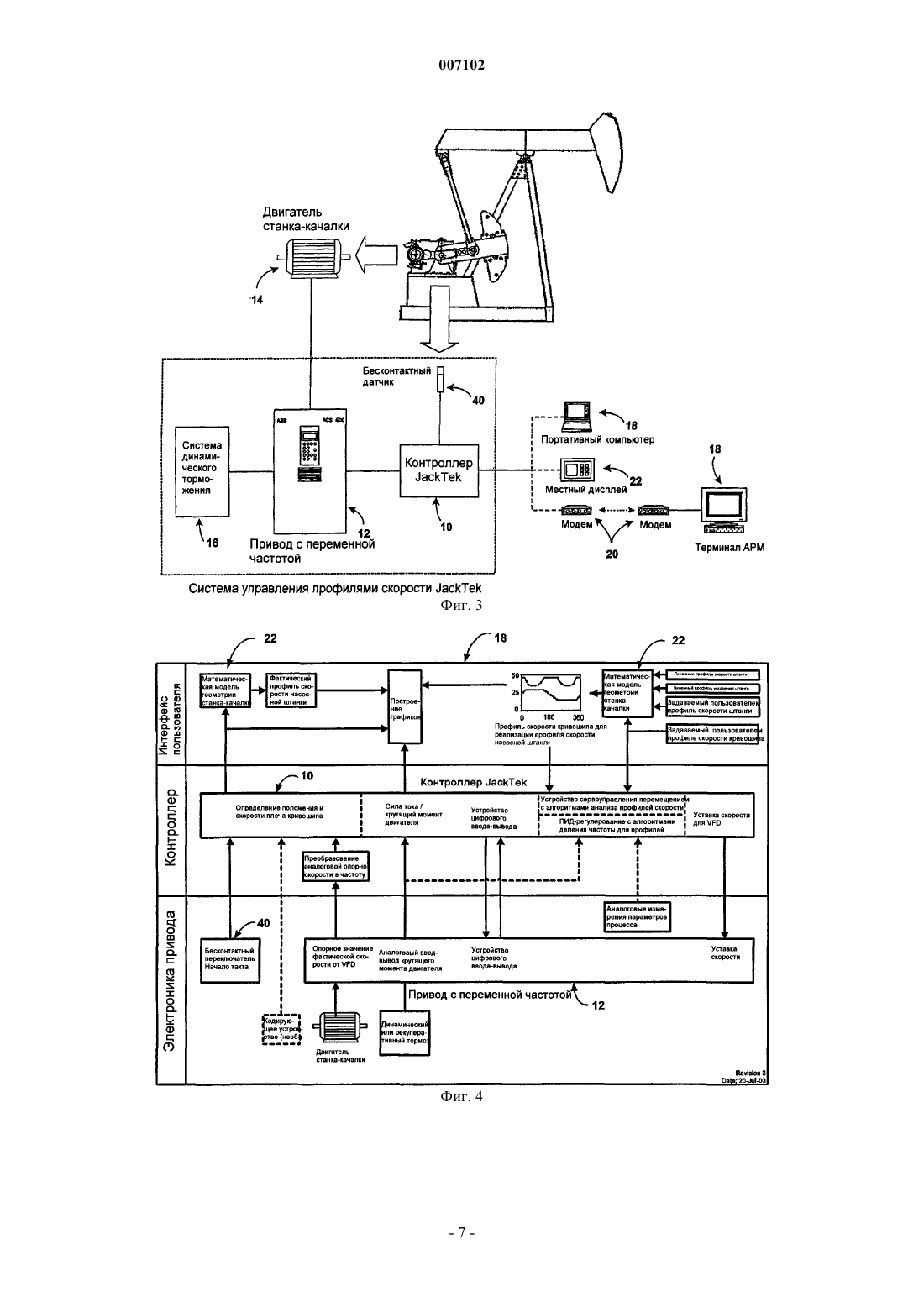
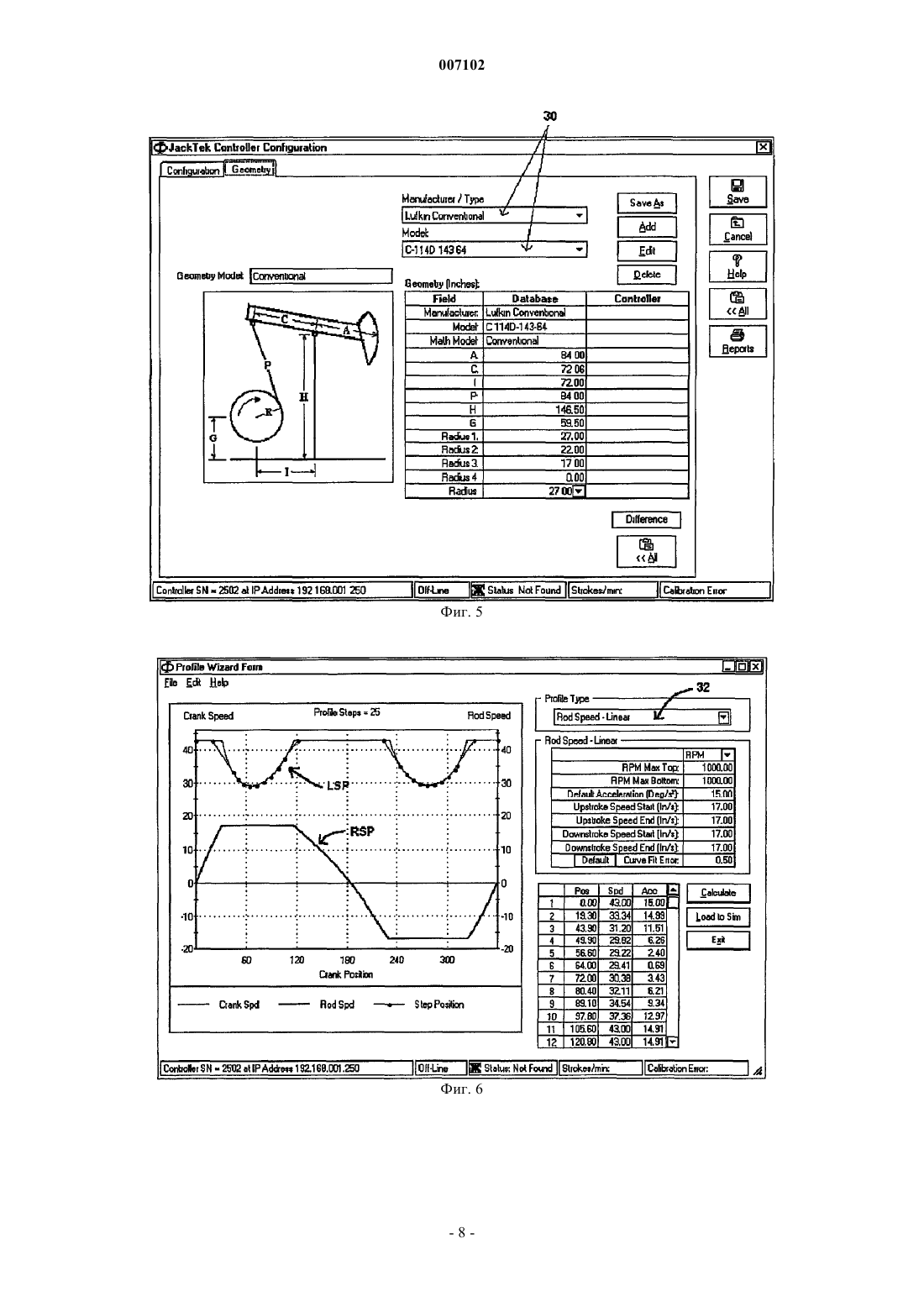
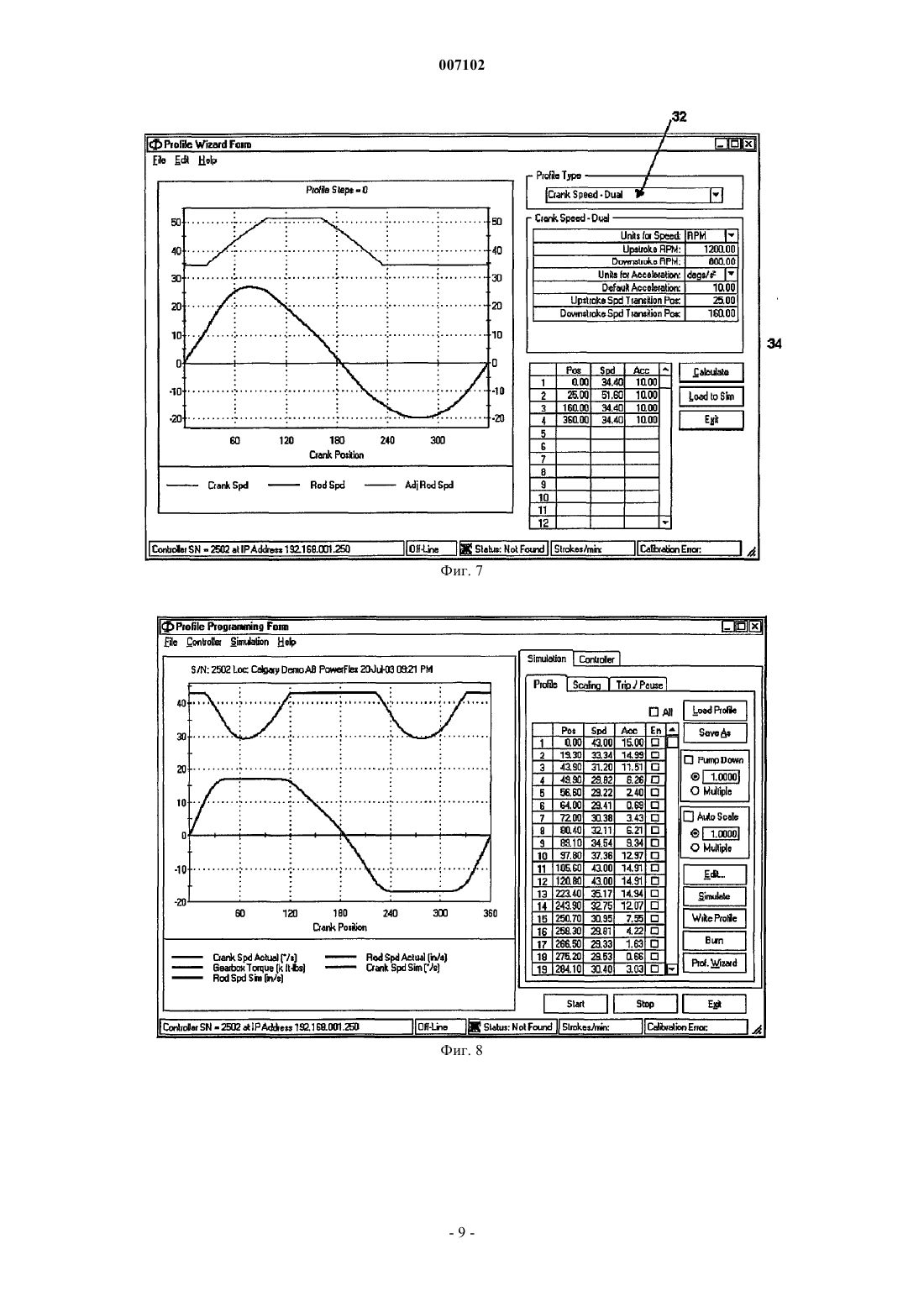
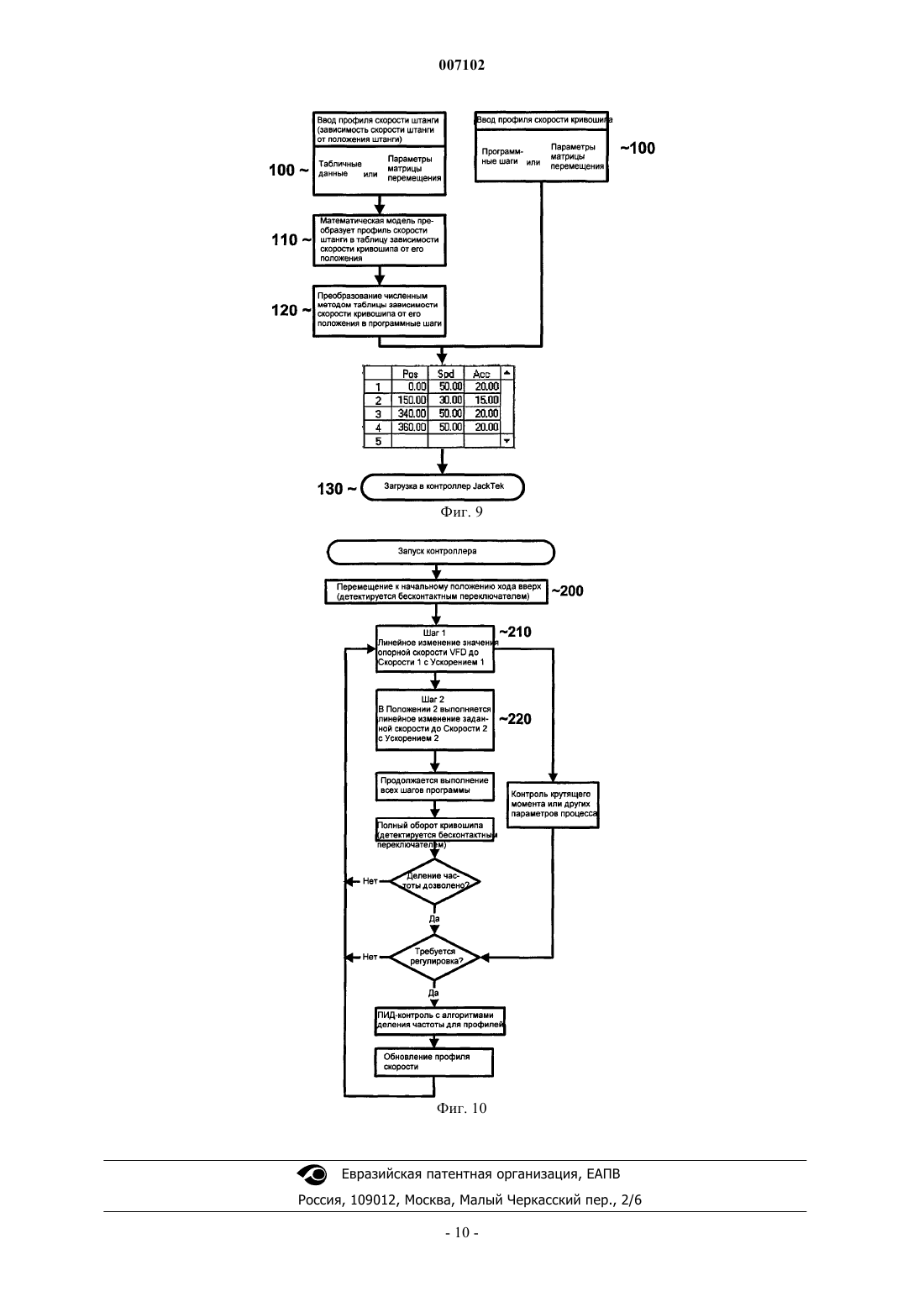
007102 Область техники Настоящее изобретение касается системы изменения скорости возвратно-поступательного насоса с вращательным приводом. Конкретнее, оно касается способа и аппарата для контроля внутрицикловой скорости насосной штанги станка-качалки. Известный уровень техники Возвратно-поступательные насосы, такие как станки-качалки, обычно работают с фиксированной скоростью вращения электродвигателя на протяжении оборота плеча кривошипа. Скорость, ускорение и положение линейного перемещения, прикладываемые к колонне насосных штанг в головке балансира,определяются скоростью, ускорением и положением плеча кривошипа и геометрией станка-качалки. Геометрия типичного станка-качалки изображена на фиг. 1. Обычная работа станка-качалки заключается в поддержании постоянной скорости кривошипа. В результате, геометрия качалки определяет скорость насосной шланги, движущейся по кривой, имеющей форму синусоиды. Регулировка с целью оптимизации производительности скважины исторически была связана с изменением геометрии насоса или осуществлялась за счет увеличения или уменьшения общей скорости вращения кривошипа. Обычно скорость кривошипа остается фиксированной на протяжении цикла и динамические свойства насоса определяются геометрией. Были реализованы способы, в которых скорость меняется на протяжении такта, обычно с увеличением скорости при ходе вверх с целью максимального увеличения эффективности и уменьшением скорости при ходе вниз - во избежание удара о столб флюида. Например, в патенте США 4102394 раскрыта система управления для электродвигателя с регулируемой частотой вращения, используемого в качестве привода станка-качалки. Утверждается, что система управления позволяет обеспечить большую скорость хода вверх по сравнению со скоростью хода вниз и изменение частоты хода в зависимости от уровней нефти в скважине и в емкости хранилища. Однако детальное описание системы управления не приводится. Кроме того, система не позволяет реализовать заданные профили скорости. Таким образом, в данной области техники существует потребность в системе управления, включающей способы и аппараты и обеспечивающей удобный и полный контроль скорости кривошипа и скорости насосной шланги на протяжении тактового цикла. Сущность изобретения В общем смысле, изобретение включает систему управления скоростью для балансирной насосной установки с приводом от электродвигателя или двигателя внутреннего сгорания. Система позволяет пользователю контролировать динамические характеристики процесса откачивания за счет регулировки с целью компенсации геометрии насосной установки. По существу динамические характеристики и движение колонны насосных штанг отделены от геометрии насосной установки. Система включает электрические и электронные аппаратные средства, численные методы, программно реализованные алгоритмы и дизайн интерфейса пользователя, позволяющие управлять насосной установкой и профилями скорости,предназначенными для управления движением насосной штанги и динамическими характеристиками при обеспечении компенсации геометрии конкретной используемой насосной установки. В одном аспекте изобретение может включать систему управления, предназначенную для регулирования скорости насосной штанги насосной установки определенной геометрии, включающей электродвигатель с регулируемой частотой вращения и вращающееся плечо кривошипа, которая включает:(а) привод переменной частоты для обеспечения уставки скорости для двигателя;(b) контроллер, функционально связанный с приводом переменной частоты, включающий средства задания значений уставки скорости в соответствии с профилем скорости кривошипа; и(c) процессор, включающий средства для создания профиля скорости кривошипа и передачи профиля скорости кривошипа контроллеру. Система предпочтительно дополнительно включает память, содержащую математическое представление геометрии насосной установки, причем процессор дополнительно включает средства для создания профиля скорости насосной штанги и средства преобразования профиля скорости насосной штанги в профиль скорости кривошипа. В другом аспекте изобретение может включать способ контроля скорости насосной штанги насосной установки, имеющей определенную геометрию и включающей привод с переменной частотой, электродвигатель с регулируемой частотой вращения и вращающееся плечо кривошипа, который включает следующие стадии:(a) создание математической модели геометрии насосной установки;(b) получение от пользователя профиля скорости насосной штанги или профиля скорости кривошипа;(c) преобразование профиля скорости насосной штанги в профиль скорости кривошипа с использованием математической модели, если будет получен профиль скорости насосной штанги; и(d) задание уставки скорости приводу переменной частоты в соответствии с профилем скорости кривошипа. Краткое описание чертежей Изобретение будет далее описано на примере варианта исполнения со ссылками на прилагаемые упрощенные, схематичные, выполненные без соблюдения масштаба чертежи. На чертежах:-1 007102 фиг. 1 (известный уровень техники) представляет собой схематическое изображение геометрии обычного станка-качалки, в котором могут быть реализованы способ или система по настоящему изобретению; фиг. 2 представляет собой графическое изображение обычного постоянного профиля скорости кривошипа и синусоидального профиля скорости насосной штанги; фиг. 3 представляет собой схематическое изображение одного варианта исполнения системы управления скоростью качалки; фиг. 4 представляет собой блок-схему, иллюстрирующую схематическое изображение варианта исполнения, представленного на фиг. 3; фиг. 5 изображает окно компьютерной программы, показывающее компьютерное отображение геометрии качалки; фиг. 6 изображает окно компьютерной программы, показывающее линейный профиль скорости насосной штанги; фиг. 7 изображает окно компьютерной программы, показывающее линейный профиль скорости кривошипа; фиг. 8 изображает окно компьютерной программы, показывающее моделированный профиль скорости кривошипа, определенный на основании линейного профиля скорости насосной штанги, изображенного на фиг. 6; фиг. 9 представляет собой блок-схему процесса ввода профиля скорости; фиг. 10 представляет собой блок-схему процесса регулирования скорости. Детальное описание изобретения Настоящее изобретение предлагает систему управления скоростью для балансирной насосной установки с приводом от электродвигателя или двигателя внутреннего сгорания. При описании настоящего изобретения все термины, не определенные тут, имеют обычные технические значения. Обычная балансирная насосная установка изображена на фиг. 1. Специалистам хорошо известно,что геометрия насосной установки преобразует вращательное движение плеча кривошипа в вертикальнолинейное возвратно-поступательное движение устьевого сальникового штока и насосных штанг. В том значении, которое используется здесь, отдельный насосный цикл такой насосной установки определяется одним полным оборотом плеча кривошипа. Можно считать, что отдельный насосный цикл начинается в тот момент, когда колонна насосных штанг достигает своей низшей точки, и продолжается на протяжении периода времени, в течение которого колонна насосных штанг поднимается, меняет направление движения и снова опускается в исходное положение. Если предположить, что скорость кривошипа постоянна, то скорость насосной штанги будет описываться кривой синусоидальной формы, достигая нуля в высшей и низшей точках хода насосной штанги и ускоряясь до достижения максимальной скорости между этими точками, как показано на фиг. 2. Для преобразования скорости вращения кривошипа, измеряемой обычно в градусах в секунду, в линейную скорость насосной штанги, обычно измеряемую в метрах в секунду, необходимо знать размеры и конфигурацию разных компонентов насосной установки. В данном описании эти параметры называются геометрией насосной установки, и они могут быть выражены математически для вывода уравнений преобразования скорости насосной штанги в скорость кривошипа. Разработка такой математической модели для любой заданной геометрии насосной установки под силу квалифицированному специалисту в данной области техники. В том значении, которое используется здесь, профиль скорости представляет собой набор значений скорости на протяжении периода отдельного насосного цикла и может быть изображен графически, как показано на фиг. 2. На фиг. 2 профиль скорости кривошипа (CSP) представляет собой горизонтальную линию, что указывает на постоянную скорость кривошипа на протяжении цикла. Профиль скорости насосной штанги (RSP) представляет собой кривую синусоидальной формы. Специалисту в данной области техники понятно, что любые изменения скорости кривошипа преобразуются в изменения скорости насосной штанги. Кроме того, изменения от одного значения скорости к другому на протяжении цикла не происходят мгновенно, поэтому профиль скорости будет иметь наклон вверх или вниз между значениями скорости, соответствующий периодам ускорения или замедления. В одном варианте исполнения изобретение включает аппарат, включающий контроллер (10) и привод с бесступенчатым регулированием скорости (12), как изображено на фиг. 3. На практике, скорость кривошипа, определяемая профилем скорости кривошипа, задается электродвигателю с регулируемой частотой вращения (14) с помощью контроллера, имеющего устройство сервоуправления приводом. Контроллер может быть выполнен в виде компьютера общего назначения с установленным соответствующим программным обеспечением, программно-аппаратных средств, микроконтроллера, микропроцессора или множества микропроцессоров, процессора цифрового сигнала или других аппаратных средств,или в виде комбинации аппаратных и программных средств, известных специалистам в данной области техники. Контроллер будет физически регулировать скорость двигателя с помощью привода с бесступенчатым регулированием скорости (12). Пригодные приводы с бесступенчатым регулированием скорости могут быть устройствами постоянного или переменного тока и хорошо известны специалистам. В-2 007102 одном варианте исполнения, привод может быть коммерчески доступным приводом переменного тока с бесступенчатым регулированием частоты, таким как ABB ACS-601 (ABB Industry Oy, Helsinki, Finland) или приводом Allen-Bradley 1336 Impact (Rockwell Automation, Milwaukee, Wl, USA). Предпочтительно,привод с переменной частотой обеспечивает точной контроль частоты вращения двигателя и/или крутящего момента с обратной связью по скорости или без нее. При наличии обратной связи по скорости, для ее создания может использоваться импульсное кодирующее устройство на валу двигателя или другие хорошо известные средства. Если двигатель является дизелем, то контроллер (10) может работать путем открывания или закрывания дросселя (не показан) для обеспечения регулировки скорости. Предусмотрено устройство регулирования скорости двигателя динамическим торможением (16) для контроля инерционной нагрузки на том участке цикла, когда колонна насосных штанг падает или тормозится. Устройства регулирования скорости двигателя динамическим торможением хорошо известны специалистам по системам бесступенчатого регулирования скорости. В некоторых случаях вес колонны насосных штанг превышает сопротивление, создаваемое вязкостью флюида в нефтяной скважине и собственным трением в насосной установке. Вследствие этого при ходе вниз насосная установка создает энергию, которая передается на привод с переменной частотой через электродвигатель. В одном варианте исполнения устройство регулирования скорости двигателя динамическим торможением включает группу сопротивлений - как хорошо известно специалистам. Могут быть использованы также варианты линейного торможения или привода с рекуперативным торможением. В одном варианте исполнения контроллер (10) представляет собой микропроцессор, а интерфейс пользователя (18) создается с помощью отдельного персонального компьютера (ПК) общего назначения,такого как портативный компьютер, функционально связанный с контроллером с помощью пригодного устройства цифрового ввода/вывода. В данном варианте исполнения ПК включает память, которая содержит математическую модель насосной установки, и программное обеспечение, позволяющее пользователю ввести профиль скорости кривошипа или профиль скорости насосной штанги. Если пользователь задает профиль скорости кривошипа, то он непосредственно используется для контроля скорости кривошипа контроллером. Если же пользователь задает профиль скорости насосной штанги, то он должен быть преобразован в профиль скорости кривошипа с помощью математической модели насосной установки, который затем используется для регулировки скорости кривошипа контроллером. В другом варианте исполнения интерфейс пользователя (18) находится на терминале автоматизированного рабочего места (АРМ) и сообщается с контроллером (10) с помощью стандартных сетевых протоколов обмена информацией, таких как протоколы TCP/IP или Ethernet. Как показано на фиг. 3, дистанционный терминал АРМ (18) может сообщаться с контроллером посредством телефонных, радиочастотных (RF) или спутниковых модемов (20), подключенных к терминалу (18) и контроллеру (10). В тех случаях, когда интерфейс пользователя (18) расположен дистанционно, может быть предусмотрен местный дисплей (22) для отображения заданных пользователем профилей скорости и диаграммы результатов. Фиг. 4 показывает схематическое изображение одного варианта исполнения системы по настоящему изобретению. Контроллер (10) выполнен отдельно от интерфейса пользователя (18), как изображено на фиг. 3. Однако в альтернативном варианте исполнения, контроллер и интерфейс пользователя могут быть также выполнены в одном корпусе, например, компьютера общего назначения. В предпочтительном варианте исполнения интерфейс пользователя воплощен в программном обеспечении, работающем на компьютере общего назначения, тогда как контроллер выполнен отдельно в виде аппаратнопрограммных средств. Интерфейс пользователя (18) включает память (22), в которой может храниться математическая модель геометрии станка-качалки. Предпочтительно, интерфейс пользователя может также включать программный модуль, обеспечивающий возможность выбора известной математической модели по предварительно заданной геометрии станка-качалки или создания и сохранения новой математической модели. Как видно на фиг. 5, математическая модель может быть выбрана с помощью системы выпадающих меню (30), соответствующих конкретным моделям выбранных производителей. Альтернативно может быть введена или создана новая математическая модель путем ввода соответствующих значений геометрии качалки, которая может быть затем сохранена в памяти и которая является доступной для других модулей интерфейса пользователя. Интерфейс пользователя может также включать модуль, позволяющий быстро и удобно вводить определенный пользователем профиль скорости насосной штанги (RSP) или профиль скорости кривошипа (CSP). Определяемый пользователем RSP может состоять из множества определяемых пользователем значений, таких как начальная, максимальная и конечная скорость хода вверх и начальная, максимальная и конечная скорость хода вниз. Степень ускорения также может задаваться пользователем или пользователь использовать значение, принятое по умолчанию. В одном варианте исполнения могут быть предварительно заданы один или несколько типов профилей, которые сохраняются в памяти и предлагаются как варианты выбора меню. В одном варианте исполнения два типа профилей представляют собой линейный RSP и линейный CSP. Специалистам в данной области техники понятно, что линейный или постоянный RSP может быть получен только при использовании криволинейного CSP. С другой стороны, линейный CSP даст криволинейный RSP.-3 007102 Фиг. 6 представляет собой графическое изображение экрана с окном программы, используемым для задания линейного RSP. Тип профиля выбирается из выпадающего меню (32), расположенного в правой верхней части окна. Видно, что в данном примере скорость насосной штанги ограничена максимальным значением при ходе вверх и вниз, а степень ускорения или замедления является относительно линейной. Специалисту в данной области техники понятно, что для такого RSP необходим CSP, включающий периоды постепенного уменьшения и увеличения скорости, соответствующие максимальной линейной скорости насосной штанги. В данном примере степень ускорения задана, а начальная и конечная скорости при ходе вверх имеют такие же значения, как и начальная и конечная скорости при ходе вниз. После этого компьютерная программа преобразует RSP в CSP и создает ряд шагов профиля. Каждый шаг профиля представляет собой изменение скорости в заданном положении кривошипа, а также величину ускорения кривошипа. Как показано на фиг. 6, линейный RSP может быть преобразован в CSP, имеющий 23 шага профиля. В данном примере для определения CSP используются параметры движения насосной штанги. Однако в альтернативных вариантах исполнения пользователь может ввести таблицу с данными шагов RSP, каждый из которых состоит из положения насосной штанги и требуемой скорости насосной штанги в данном положении. Фиг. 7 представляет собой графическое изображение экрана с окном программы, используемым для задания линейного CSP. Тип профиля (Crank Speed-Dual) (Скорость кривошипа - Двойной) выбирают из типов профилей в выпадающем меню (32). Этот тип CSP может быть определен пользователем путем задания требуемой скорости в предварительно определенных точках цикла. CSP включает ряд отдельных шагов, каждый из которых состоит из положения кривошипа, соответствующего начальной точке требуемой скорости, требуемой скорости и степени ускорения. CSP в форме таблицы данных, состоящей из четырех шагов (34), изображен на фиг. 7. CSP может также быть представлен графически, как это также изображено на фиг. 7. Таблица данных (34) и графическое представление могут быть сгенерированы путем ввода значений в таблицу данных или путем задания параметров движения, таких как максимальная скорость вращения на определенных этапах на протяжении цикла. После задания пользователем требуемого CSP или RSP программа может создать моделирующую функцию для просмотра результирующего CSP или RSP. Фиг. 8 представляет собой графическое изображение экрана с окном программы, показывающим результаты моделирования линейного RSP (RSP,изображенного на фиг. 6). В данном случае был задан RSP, и пользователь может увидеть графически и в табличной форме результаты моделирования CSP. В одном варианте исполнения крутящий момент двигателя или нагрузка на насосную штангу могут контролироваться с помощью соответствующих датчиков. Обычно желательно ограничивать крутящий момент или нагрузку на насосную штангу определенными максимальными значениями во избежание перегрузки штанги. Может быть предусмотрено пропорционально-интегрально-дифференциальное(ПИД) регулирование с алгоритмом деления частоты для обеспечения регулировки скорости в заданных пределах значений параметров. Если измеренный крутящий момент превышает заданное максимальное значение, то может быть применен алгоритм понижения частоты для снижения профиля скорости. В предпочтительном варианте исполнения привод с переменной частотой вырабатывает опорное значение действительной скорости путем контроля формы кривых напряжения и тока электродвигателя или с помощью каких-либо других средств. Опорное значение скорости используется для расчета положения кривошипа в любой момент времени на протяжении цикла. В одном варианте исполнения средство определения положения кривошипа включает устройство для вырабатывания аналогового опорного значения скорости и устройство преобразования опорного значения скорости в последовательность прямоугольных импульсов, частота которых пропорциональна скорости. Скорость, представленная прямоугольными колебаниями, может быть затем интегрирована для определения положения кривошипа путем подсчета фронтов прямоугольных колебаний, как, например, при вводе с импульсного кодирующего устройства. В другом варианте исполнения положение и скорость кривошипа могут быть измерены непосредственно с помощью импульсного кодирующего устройства. Поскольку положение кривошипа на протяжении цикла рассчитывается приближенно или может происходить проскальзывание ремня или другие ошибки, имеющие механическую или электрическую природу, желательно предусмотреть средства исправления ошибок. В одном варианте исполнения коррекция ошибок производится путем однократного сброса параметров расчетного положения и установки фактического положения в каждом цикле. Это может быть осуществлено путем использования бесконтактного переключателя (40), устанавливаемого на насосной установке в таком месте, где он может детектировать прохождение плеча кривошипа, и вырабатывающего выходной сигнал при прохождении плеча кривошипа. Сигнал бесконтактного переключателя может быть использован затем для восстановления исходного значения расчетного положения плеча кривошипа, определяемого путем вычислений с использованием данных скорости/времени, выполняемых контроллером, в начале каждого цикла или в определенной точке на протяжении каждого цикла. В предпочтительном варианте исполнения опорное значение фактической скорости может быть использовано для получения профилей скорости в реальном масштабе времени, которые могут быть представлены в виде графика и отображены на дисплее или записаны. Особенно полезным может оказаться-4 007102 сопоставление в реальном масштабе времени фактического профиля скорости с профилем скорости, определяемым пользователем. Такая функция представления в виде графика может быть частью компьютерного программного обеспечения в интерфейсе пользователя и может также осуществлять получение и построение графиков других данных и переменных, таких как сила тока электродвигателя или крутящий момент. В одном из вариантов исполнения может быть предусмотрен кодовый датчик положения для вырабатывания сигнала фактического положения плеча кривошипа, причем в этом случае бесконтактный переключатель или другие средства коррекции ошибки могут не быть необходимыми, хотя они могут все-таки оставаться желательными для исправления механических ошибок, таких как проскальзывание ремня. Далее будет описан вариант исполнения изобретения в виде способа со ссылками на фиг. 9 и 10. Фиг. 9 представляет собой блок-схему, отображающую последовательность действий, необходимых для создания ряда программных шагов, представляющих CSP или RSP. Первым шагом является вводCSP или RSP путем ввода таблицы данных, программных шагов или матрицы параметров движения(100). Если осуществляется ввод RSP, то необходимо преобразовать значения RSP в CSP (110), который состоит из ряда заданных значений скорости кривошипа в определенных положениях кривошипа. Таблица CSP затем преобразуется (120) в последовательность программных шагов, которые могут быть загружены (130) в контроллер, функционально связанный с приводом переменной частоты. Фиг. 10 демонстрирует работу контроллера. Бесконтактный переключатель вырабатывает сигнал начала цикла (200), после чего привод с переменной частотой (VFD) производит линейное увеличение скорости кривошипа до требуемой начальной скорости (210) при заданной степени ускорения. После этого рассчитывается положение кривошипа с использованием опорного значения фактической скорости, как описано выше, и в соответствующем положении запускается следующий программный шаг(220). В этом положении уставка скорости VFD увеличивается или уменьшается с требуемым ускорением, и этот процесс продолжается на протяжении всех программных шагов цикла. Бесконтактный переключатель сигнализирует о завершении цикла, которое, очевидно, совпадает с началом следующего цикла. В это время, если включено ПИД-регулирование с механизмом понижения частоты, и если в течение этого цикла будет детектирован избыточный крутящий момент или состояние перегрузки насосной штанги, уставки скорости могут быть снижены и для следующего цикла может быть создан новый профиль скорости с пониженной частотой. Алгоритм понижения частоты может быть составлен таким образом, чтобы снижать все уставки скорости на предварительно определенную величину при каждом цикле до тех пор, пока крутящий момент, определяемый датчиком крутящего момента, не уменьшится до приемлемого уровня. Альтернативно алгоритм понижения частоты может быть составлен таким образом,чтобы определять величину, на которую было превышено значение крутящего момента, и снижать уставки скорости на определенную долю, рассчитанную на уменьшения крутящего момента до приемлемого уровня за один шаг. В одном из альтернативных вариантов исполнения алгоритмы понижения частоты могут быть рассчитаны на понижение частоты только для части цикла, например только для участка хода вверх. Специалистам в данной области техники понятно, что в рамках описанного конкретного изобретения могут быть реализованы различные его модификации, усовершенствования и варианты. Различные признаки и элементы изобретения могут быть объединены в отличный от раскрытых в данной заявке комбинаций способ, не выходящий за рамки объема изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система управления для изменения скорости насосной штанги насосной установки, имеющей определенную геометрию и включающей электродвигатель с регулируемой частотой вращения и вращающееся плечо кривошипа, включающая:(a) привод с переменной частотой для задания уставки скорости для электродвигателя;(b) контроллер, функционально связанный с приводом переменной частоты, включающий средство вывода уставки скорости в соответствии с профилем скорости кривошипа; и(c) процессор, включающий средство создания профиля скорости кривошипа и передачи профиля скорости кривошипа контроллеру. 2. Система по п.1, дополнительно включающая память, содержащую математическое представление геометрии насосной установки, в которой процессор включает средства для создания профиля скорости насосной штанги и средства преобразования профиля скорости насосной штанги в профиль скорости кривошипа. 3. Система по п.1 или 2, дополнительно включающая средства определения положения плеча кривошипа и его скорости. 4. Система по п.3, в которой средства определения включают бесконтактный датчик, связанный с плечом кривошипа, который детектирует периодическое прохождение плеча кривошипа и передает после него сигнал.-5 007102 5. Система по п.4, в которой привод с переменной частотой включает средства, вырабатывающие опорное значение фактической скорости, которое передается средству определения. 6. Система по п.1, дополнительно включающая датчик определения крутящего момента двигателя и средство повышающего или понижающего регулирования профиля скорости кривошипа для увеличения или уменьшения крутящего момента двигателя. 7. Система по п.1, дополнительно включающая средство для создания фактического профиля скорости кривошипа по результатам определения положения и скорости кривошипа, средство преобразования фактического профиля скорости кривошипа в фактический профиль скорости насосной штанги и средство отображения на экране фактического профиля скорости кривошипа и/или насосной штанги. 8. Система по п.2, дополнительно включающая средство моделирования фактического профиля скорости кривошипа по требуемому профилю скорости кривошипа или насосной штанги и отображения на экране моделированного профиля скорости кривошипа. 9. Способ регулирования скорости насосной штанги насосной установки, имеющей определенную геометрию и включающей привод переменной частоты, электродвигатель с регулируемой частотой вращения и вращающееся плечо кривошипа, включающий следующие стадии:(a) создание математической модели геометрии насосной установки;(b) получение от пользователя профиля скорости насосной штанги или профиля скорости кривошипа;(c) преобразование профиля скорости насосной штанги в профиль скорости кривошипа с помощью математической модели; и(d) вывод на привод переменной частоты уставки скорости в соответствии с профилем скорости кривошипа. 10. Способ по п.9, дополнительно включающий стадию определения положения и скорости плеча кривошипа по опорному значению фактической скорости, генерируемому приводом с переменной частотой. 11. Способ по п.10, дополнительно включающий стадию установки в исходное положение плеча кривошипа при каждом его обороте с помощью бесконтактного переключателя, который детектирует прохождение плеча кривошипа и передает после этого сигнал. 12. Способ по п.9, дополнительно включающий стадию повышающего или понижающего регулирования профиля скорости кривошипа в зависимости от характеристик крутящего момента двигателя. 13. Способ по п.12, в котором профиль скорости кривошипа подвергается повышающему или понижающему регулированию в начале цикла, а не на протяжении цикла. 14. Способ по п.10, дополнительно включающий стадию создания и отображения на экране фактического профиля скорости кривошипа или насосной штанги по определенным значениям положения и скорости плеча кривошипа. Известный уровень техники Фиг. 1 Скорость кривошипа и скорость насосной штанги при фиксированных скоростях
МПК / Метки
МПК: F04B 47/02, F04B 49/06
Метки: система, управления, способ, насосом, возвратно-поступательным
Код ссылки
<a href="https://eas.patents.su/11-7102-sistema-i-sposob-upravleniya-vozvratno-postupatelnym-nasosom.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ управления возвратно-поступательным насосом</a>
Оптоэлектронная система управления и способ управления
Номер патента: 3571
Опубликовано: 26.06.2003
Авторы: Леггет Найджел Дерек, Макиннес Джеймс
МПК: H03K 17/78, G08C 23/06
Метки: система, управления, оптоэлектронная, способ
Формула / Реферат:
1. Система управления, предназначенная для приведения в действие множества электротехнических устройств и имеющая импульсный источник света, выдающий световые импульсы с варьируемой частотой, которые поступают во множество управляющих шлюзов, каждый из которых при его освещении световыми импульсами с запускающей частотой, при которой происходит срабатывание соответствующего устройства, обеспечивает подачу на такое устройство рабочего напряжения,...
Способ и система управления скоростью двигателя для улучшения переключения передач
Номер патента: 3849
Опубликовано: 30.10.2003
Автор: Мейер Дуэйн Фредерик
МПК: B60K 41/10
Метки: скоростью, способ, передач, улучшения, двигателя, управления, переключения, система
Формула / Реферат:
1. Способ улучшения качества переключения передач в транспортном средстве, имеющем оснащенный регулятором двигатель (10), приводящий в действие силовую трансмиссию (12) с переключением скоростей под нагрузкой, содержащую коробку (18) передач, которая работает с помощью набора управляемых давлением муфт (20) сцепления, управление которыми осуществляется с помощью соответствующего набора клапанов (22) управления переключением передач с приводом от...
Система и способ для управления множеством инструментов посредством одной управляющей линии
Номер патента: 6472
Опубликовано: 29.12.2005
Авторы: Росс Дональд В., Ро Ян, Йокела Тимо, Туэхе Йарле, Джоунас Джейсон К., Триттскух Дженнифер Э.
МПК: E21B 34/16, E21B 44/00
Метки: множеством, одной, управляющей, посредством, способ, линии, управления, система, инструментов
Формула / Реферат:
1. Система для управления множеством клапанных систем, развернутых в скважине, содержащая множество устройств для регулирования расхода, индексирующее устройство, функционально соединенное с каждым устройством для регулирования расхода, гидравлическую управляющую линию в сообщении по текучей среде с каждым индексирующим устройством, при этом индексирующие устройства устройств для регулирования расхода выполнены с возможностью согласованного...
Кривошипно-кулисный механизм для передачи возвратно-поступательного движения
Номер патента: 4348
Опубликовано: 29.04.2004
Авторы: Кидибаев Мустафа Мусаевич, Абдраимов Самудин, Токтакунов Жолдошбек Шамуканбетович
МПК: F16H 21/44
Метки: передачи, механизм, возвратно-поступательного, движения, кривошипно-кулисный
Формула / Реферат:
Кривошипно-кулисный механизм для передачи возвратно-поступательного движения, содержащий стойку с прямолинейными направляющими, установленный в них ползун с шарнирно закрепленной к нему кулисой, кривошип, установленный на стойке и кинематически связанный с кулисой через камень, механизм смещения ползуна и пружину для поджатия ползуна к верхнему крайнему положению, отличающийся тем, что кулисный камень имеет длину, большую, чем длина кривошипа, а...
Система и способ управления регулируемыми трансмиссиями
Номер патента: 4382
Опубликовано: 29.04.2004
Автор: Ферреро Пьетро
МПК: B62M 25/08, B60K 41/06
Метки: система, регулируемыми, трансмиссиями, управления, способ
Формула / Реферат:
1. Система для управления регулируемой трансмиссией, установленной на транспортном средстве и связанной с приводом для изменения передаточного числа, и рабочим средством для приложения тягового усилия к трансмиссии периодическим действием заданной частоты, содержащая первые сенсорные средства, чувствительные к тяговому усилию, для генерирования первого сигнала, вторые сенсорные средства, чувствительные к скорости движения транспортного средства,...
Предыдущий патент: Селективные модуляторы андрогенового рецептора и способы их применения
Следующий патент: Способ и система обеспечения доступа к информации в сети
Случайный патент: Нанодисперсия