Грубая синхронизация частоты в системах с множеством несущих
Номер патента: 2529
Опубликовано: 27.06.2002
Авторы: Буххольц Штефан, Хойбергер Альберт, Эберляйн Эрнст, Бадри Сабах, Герхойзер Хайнц, Липп Штефан


Формула / Реферат
1. Способ выполнения грубой синхронизации частоты, компенсирующий девиацию частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, причем способ включает этапы
приема сигнала,
преобразования принятого сигнала с понижением частоты,
выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей,
корреляции огибающей с предварительно определенной опорной характеристикой для определения девиации частоты несущей и
управления частотой генератора, исходя из девиации частоты несущей.
2. Способ по п.1, отличающийся тем, что девиация частоты несущей определяется следующим образом

где r~ - значения огибающей принятого сигнала,
S*AM - комплексно-сопряженные значения предварительно определенной опорной характеристики,
ТMCM - длительность полезного символа,
k - индекс и
L/2 - половина длины последовательности, используемой для грубой синхронизации частоты.
3. Способ выполнения, на основе грубой синхронизации частоты, компенсации девиации частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, которая содержит две идентичных последовательности, причем способ включает этапы
приема сигнала,
преобразования принятого сигнала с понижением частоты,
выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей, имеющей два участка, основанные на упомянутых идентичных последовательностях,
корреляции одного из участков огибающей с другим из участков для определения девиации частоты несущей и
управления частотой генератора, исходя из девиации частоты несущей.
4. Способ по п.3, отличающийся тем, что этап корреляции дополнительно содержит взвешивание соответствующих значений упомянутых двух участков с соответствующими значениями упомянутых двух последовательностей.
5. Способ по п.3, отличающийся тем, что девиация частоты несущей определяется следующим образом

где r~ - значения упомянутых участков,
r~* - комплексно-сопряженные значения упомянутых участков,
ТMCM - длительность полезного символа,
k - индекс и
L - количество значений двух последовательностей опорного символа.
6. Способ по п.4, отличающийся тем, что девиация частоты несущей определяется следующим образом

где r~ - значения упомянутых участков,
r~* - комплексно-сопряженные значения упомянутых участков,
ТMCM - длительность полезного символа,
k - индекс и
L - количество значений двух последовательностей опорного символа,
SAM - значения упомянутых идентичных последовательностей и
S*AM - комплексно-сопряженные значения упомянутых идентичных последовательностей.
7. Способ по п.1, отличающийся тем, что сигнал представляет собой сигнал с ортогональным частотным уплотнением.
8. Способ по п.1, отличающийся тем, что перед этапом выполнения амплитудной демодуляции дополнительно включает выполнение быстродействующей автоматической регулировки усиления принятого и преобразованного с понижением частоты сигнала.
9. Способ по п.1, отличающийся тем, что этап выполнения амплитудной демодуляции включает вычисление амплитуды сигнала с использованием способа аlрhаmах+ betamin-.
10. Способ по п.1, отличающийся тем, что дополнительно включает этапы выборки соответствующих амплитуд принятого и преобразованного с понижением частоты сигнала и сравнения выбранных амплитуд с предварительно определенным пороговым значением для формирования битовой последовательности для выполнения упомянутой амплитудной демодуляции.
11. Способ по п.10, отличающийся тем, что этап выборки соответствующих амплитуд принятого и преобразованного с понижением частоты сигнала дополнительно включает выполнение супердискретизации принятого и преобразованногос понижением частоты сигнала.
12. Устройство для выполнения грубой синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-демодулированную битовую последовательность, причем устройство содержит
средство для приема сигнала,
понижающий преобразователь для преобразования принимаемого сигнала с понижением частоты,
амплитудный демодулятор для выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей,
коррелятор для корреляции огибающей с предварительно определенной опорной характеристикой для определения девиации частоты несущей и
средство для управления частотой генератора, исходя из девиации частоты несущей.
13. Устройство по п.12, отличающееся тем, что содержит средство для определения девиации частоты несущей следующим образом

где r~ - значения огибающей принятого сигнала,
S*AM - комплексно-сопряженные значения предварительно определенной опорной характеристики,
ТMCM - длительность полезного символа,
k - индекс и
L/2 - количество значений опорной характеристики.
14. Устройство для выполнения, на основе грубой синхронизации частоты, компенсации девиации частоты несущей относительно частоты генератора для системы демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, которая содержит две идентичные последовательности, причем устройство содержит
средство для приема сигнала,
понижающий преобразователь для преобразования принимаемого сигнала с понижением частоты,
амплитудный демодулятор для выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей, имеющей два участка, которые основаны на упомянутых идентичных последовательностях,
коррелятор для корреляции одного из участков огибающей с другим из участков для определения девиации частоты несущей и
средство для управления частотой генератора, исходя из девиации частоты несущей.
15. Устройство по п.14, отличающееся тем, что коррелятор содержит средство для взвешивания соответствующих значений упомянутых двух участков с использованием соответствующих значений упомянутых двух последовательностей.
16. Устройство по п.13, отличающееся тем, что содержит средство для определения девиации частоты несущей следующим образом

где r~ - значения упомянутых участков,
r~* - комплексно-сопряженные значения упомянутых участков,
ТMCM - длительность полезного символа,
k - индекс и
L - количество значений двух последовательностей опорного символа.
17. Устройство по п.15, отличающееся тем, что содержит средство для определения девиации частоты несущей следующим образом

где r~ - значения упомянутых участков,
r~* - комплексно-сопряженные значения упомянутых участков,
ТMCM - длительность полезного символа,
k - индекс,
L - количество значений двух последовательностей опорного символа,
SAM - значения упомянутых идентичных последовательностей и
S*AM - комплексно-сопряженные значения упомянутых идентичных последовательностей.
18. Устройство по п.13, отличающееся тем, что сигнал представляет собой сигнал с ортогональным частотным уплотнением.
19. Устройство по п.13, отличающееся тем, что дополнительно содержит перед амплитудным демодулятором средство для выполнения быстродействующей автоматической регулировки усиления принятого и преобразованного с понижением частоты сигнала.
20. Устройство по п.13, отличающееся тем, что амплитудный демодулятор содержит средство для вычисления амплитуды сигнала с использованием способа alphamax+ betamin-.
21. Устройство по п.13, отличающееся тем, что дополнительно содержит средство для выборки соответствующих амплитуд принятого и преобразованного с понижением частоты сигнала, причем амплитудный демодулятор содержит средство для сравнения выбранных амплитуд с заранее определенным пороговым значением для формирования битовой последовательности.
22. Устройство по п.21, отличающееся тем, что средство для выборки содержит средство для супердискретизации принятого и преобразованного с понижением частоты сигнала.

Текст
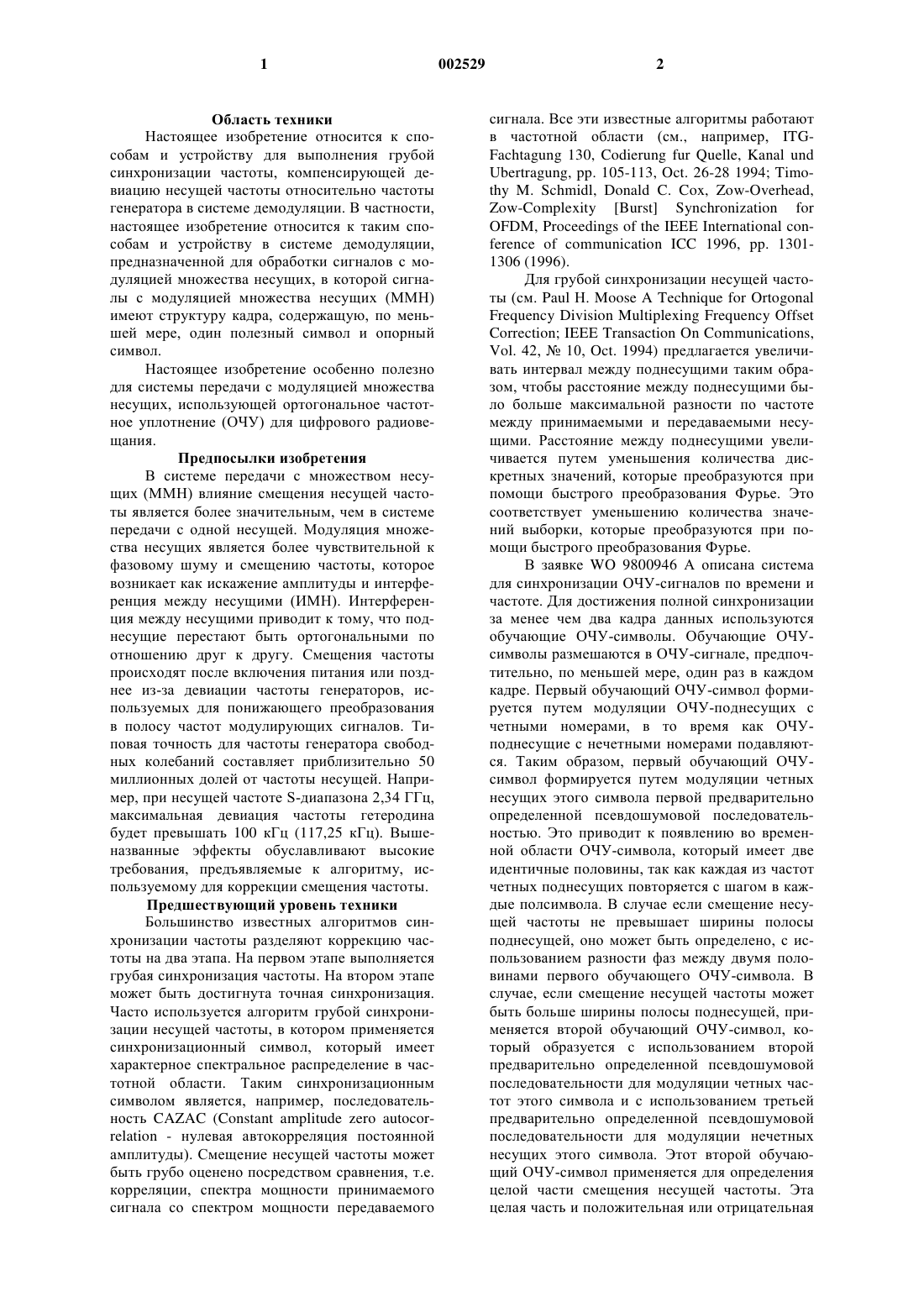
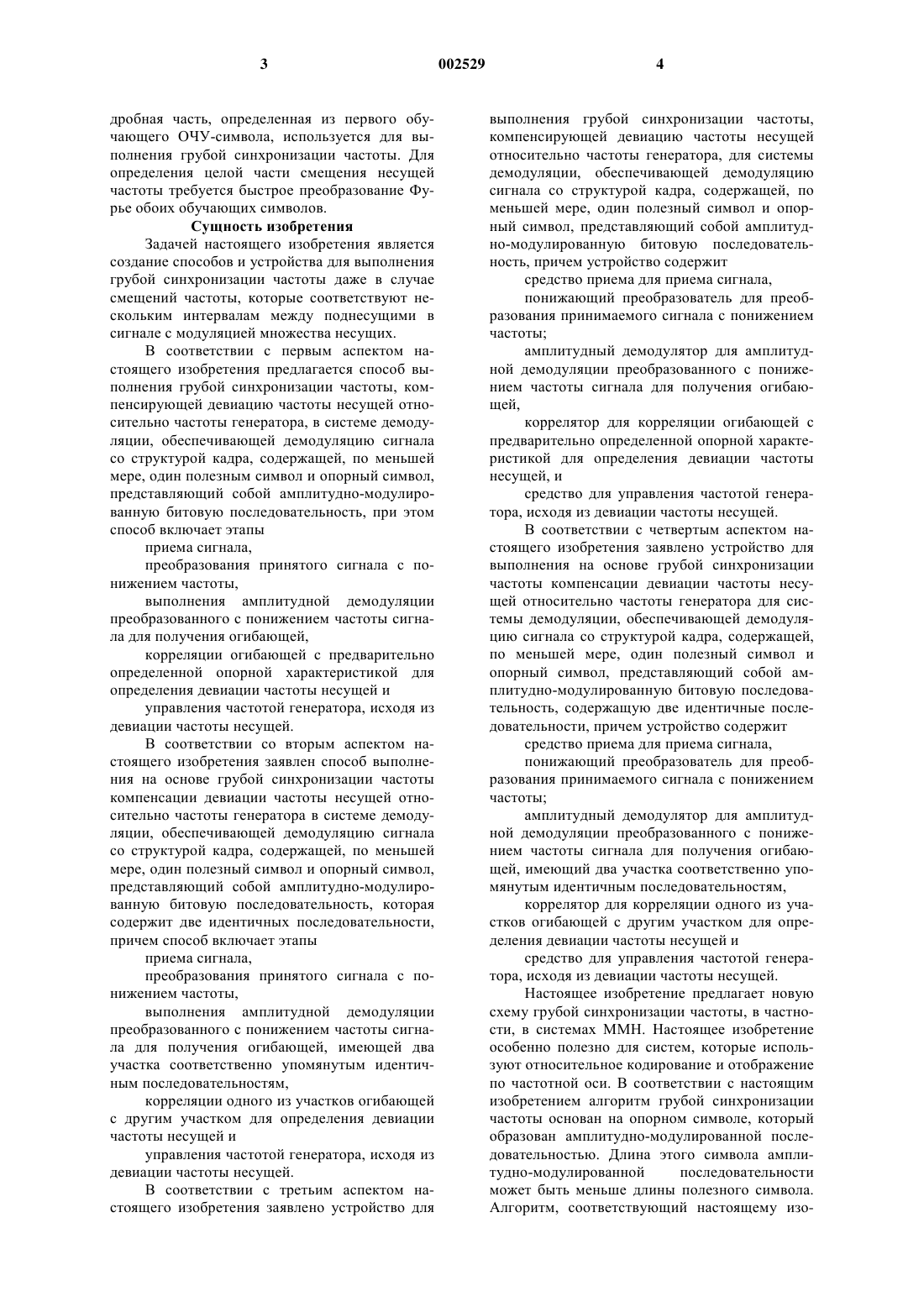
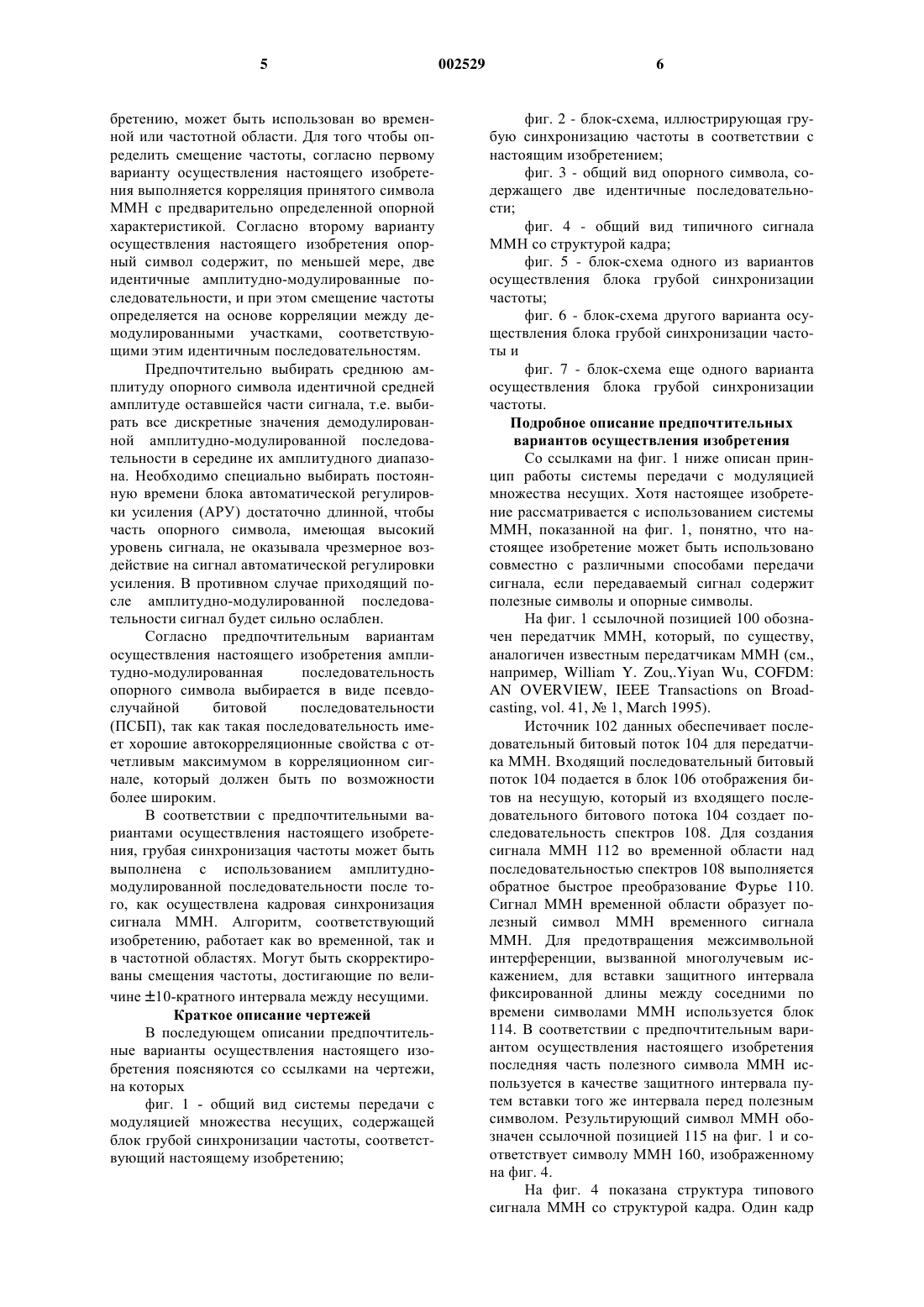
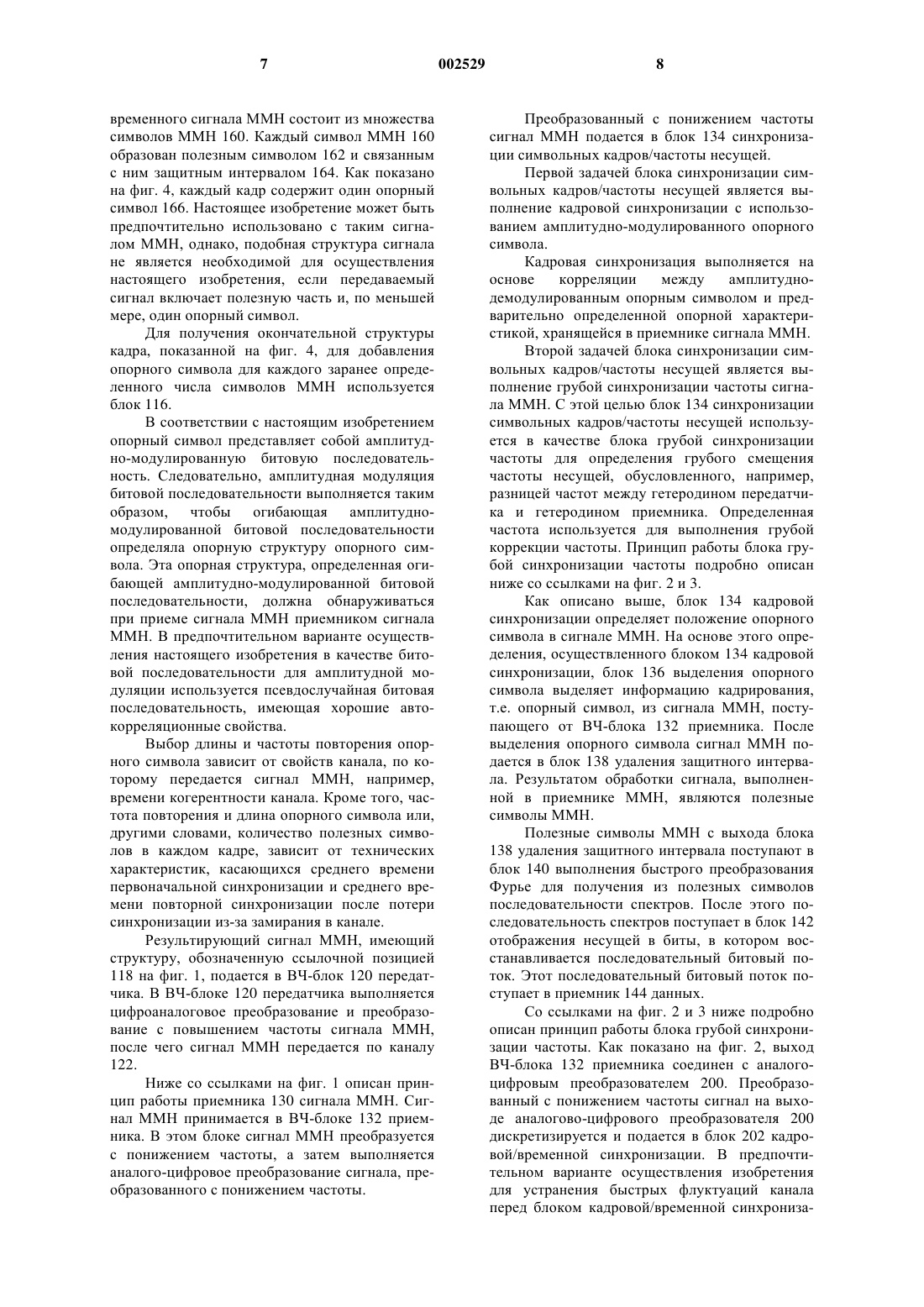
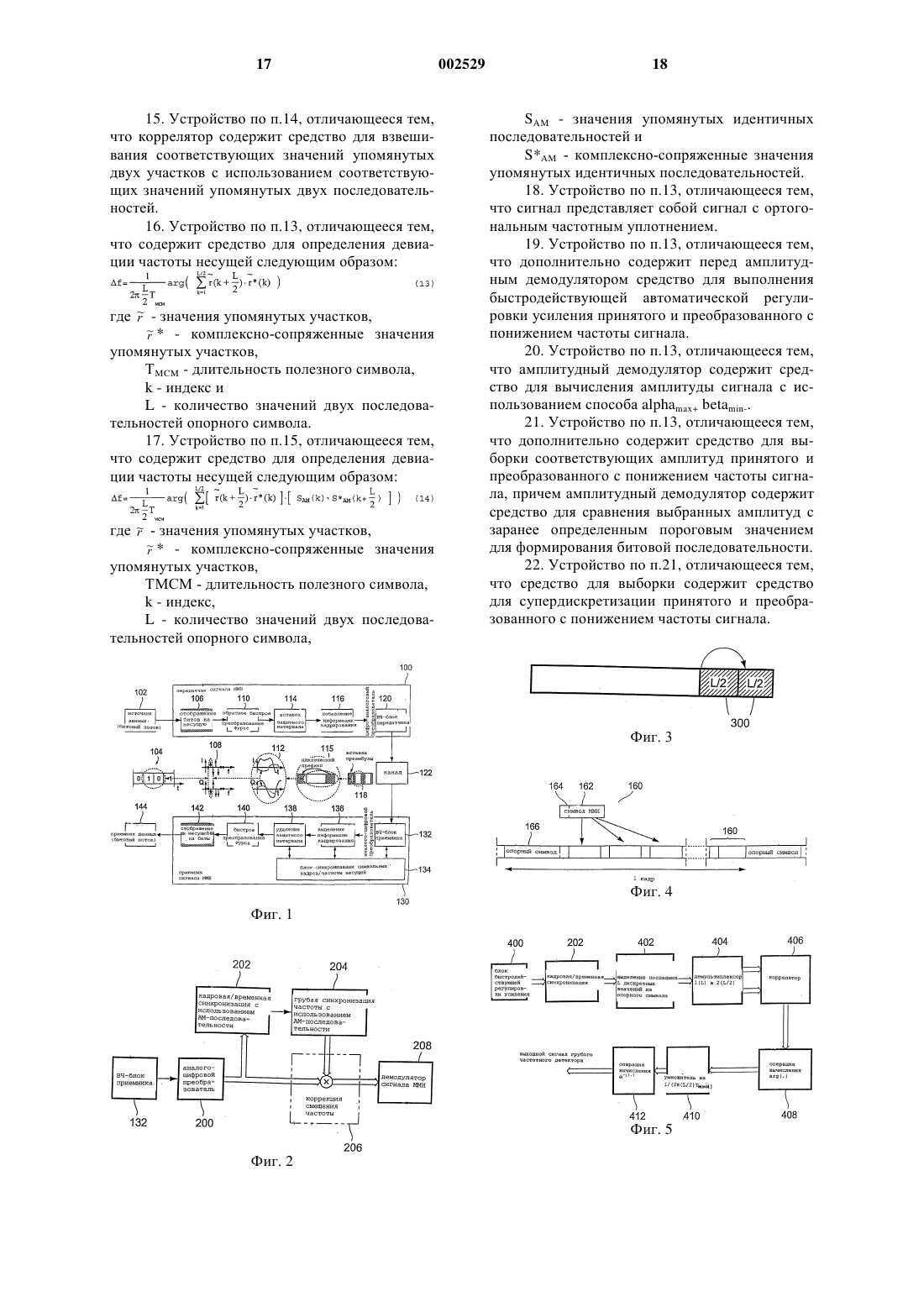
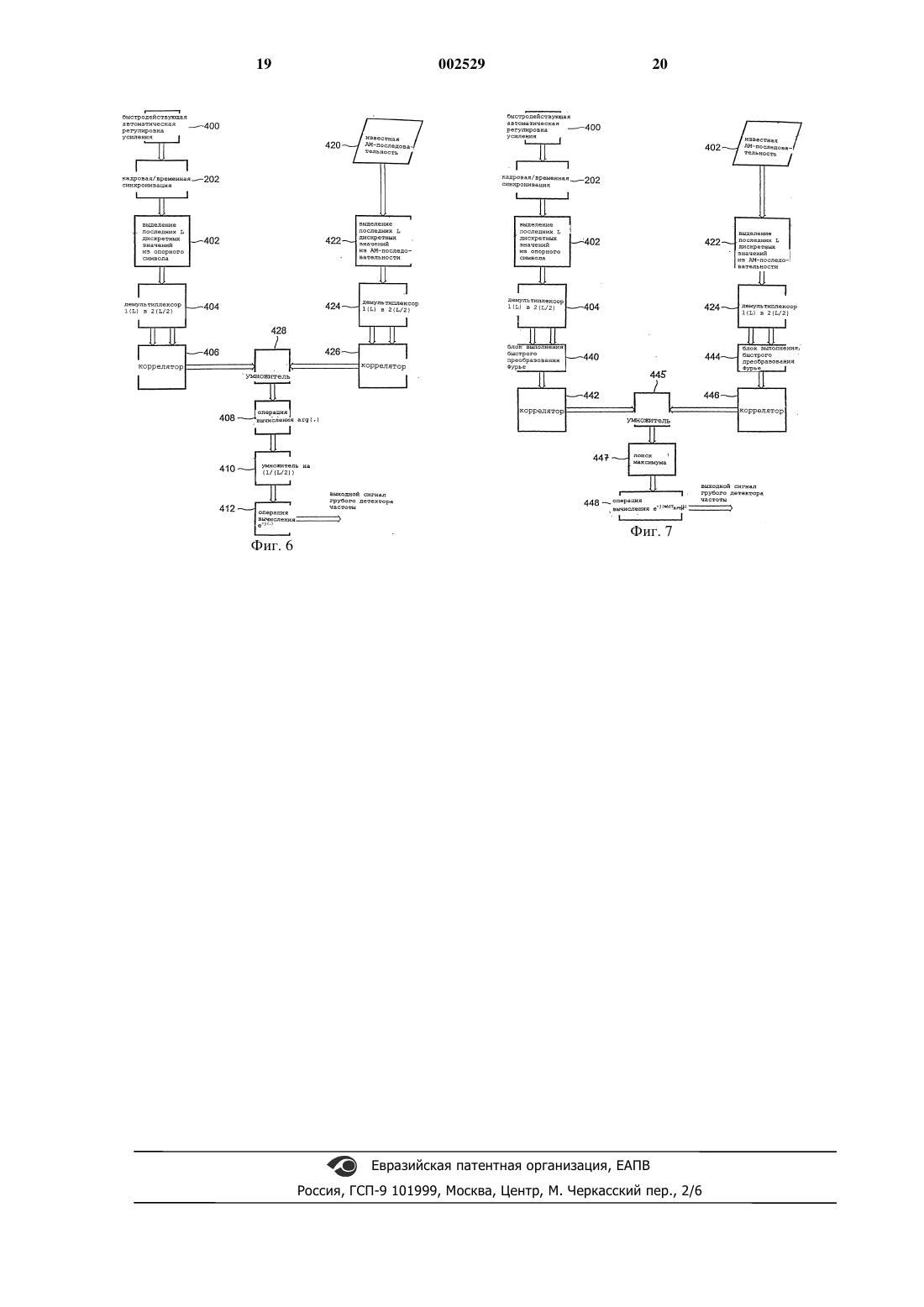
1 Область техники Настоящее изобретение относится к способам и устройству для выполнения грубой синхронизации частоты, компенсирующей девиацию несущей частоты относительно частоты генератора в системе демодуляции. В частности,настоящее изобретение относится к таким способам и устройству в системе демодуляции,предназначенной для обработки сигналов с модуляцией множества несущих, в которой сигналы с модуляцией множества несущих (ММН) имеют структуру кадра, содержащую, по меньшей мере, один полезный символ и опорный символ. Настоящее изобретение особенно полезно для системы передачи с модуляцией множества несущих, использующей ортогональное частотное уплотнение (ОЧУ) для цифрового радиовещания. Предпосылки изобретения В системе передачи с множеством несущих (ММН) влияние смещения несущей частоты является более значительным, чем в системе передачи с одной несущей. Модуляция множества несущих является более чувствительной к фазовому шуму и смещению частоты, которое возникает как искажение амплитуды и интерференция между несущими (ИМН). Интерференция между несущими приводит к тому, что поднесущие перестают быть ортогональными по отношению друг к другу. Смещения частоты происходят после включения питания или позднее из-за девиации частоты генераторов, используемых для понижающего преобразования в полосу частот модулирующих сигналов. Типовая точность для частоты генератора свободных колебаний составляет приблизительно 50 миллионных долей от частоты несущей. Например, при несущей частоте S-диапазона 2,34 ГГц,максимальная девиация частоты гетеродина будет превышать 100 кГц (117,25 кГц). Вышеназванные эффекты обуславливают высокие требования, предъявляемые к алгоритму, используемому для коррекции смещения частоты. Предшествующий уровень техники Большинство известных алгоритмов синхронизации частоты разделяют коррекцию частоты на два этапа. На первом этапе выполняется грубая синхронизация частоты. На втором этапе может быть достигнута точная синхронизация. Часто используется алгоритм грубой синхронизации несущей частоты, в котором применяется синхронизационный символ, который имеет характерное спектральное распределение в частотной области. Таким синхронизационным символом является, например, последовательность CAZAC (Constant amplitude zero autocorrelation - нулевая автокорреляция постоянной амплитуды). Смещение несущей частоты может быть грубо оценено посредством сравнения, т.е. корреляции, спектра мощности принимаемого сигнала со спектром мощности передаваемого 2 сигнала. Все эти известные алгоритмы работают в частотной области (см., например, ITGFachtagung 130, Codierung fur Quelle, Kanal undOFDM, Proceedings of the IEEE International conference of communication ICC 1996, pp. 13011306 (1996). Для грубой синхронизации несущей частоты (см. Paul Н. Moose A Technique for OrtogonalCorrection; IEEE Transaction On Communications,Vol. 42,10, Oct. 1994) предлагается увеличивать интервал между поднесущими таким образом, чтобы расстояние между поднесущими было больше максимальной разности по частоте между принимаемыми и передаваемыми несущими. Расстояние между поднесущими увеличивается путем уменьшения количества дискретных значений, которые преобразуются при помощи быстрого преобразования Фурье. Это соответствует уменьшению количества значений выборки, которые преобразуются при помощи быстрого преобразования Фурье. В заявке WO 9800946 А описана система для синхронизации ОЧУ-сигналов по времени и частоте. Для достижения полной синхронизации за менее чем два кадра данных используются обучающие ОЧУ-символы. Обучающие ОЧУсимволы размешаются в ОЧУ-сигнале, предпочтительно, по меньшей мере, один раз в каждом кадре. Первый обучающий ОЧУ-символ формируется путем модуляции ОЧУ-поднесущих с четными номерами, в то время как ОЧУподнесущие с нечетными номерами подавляются. Таким образом, первый обучающий ОЧУсимвол формируется путем модуляции четных несущих этого символа первой предварительно определенной псевдошумовой последовательностью. Это приводит к появлению во временной области ОЧУ-символа, который имеет две идентичные половины, так как каждая из частот четных поднесущих повторяется с шагом в каждые полсимвола. В случае если смещение несущей частоты не превышает ширины полосы поднесущей, оно может быть определено, с использованием разности фаз между двумя половинами первого обучающего ОЧУ-символа. В случае, если смещение несущей частоты может быть больше ширины полосы поднесущей, применяется второй обучающий ОЧУ-символ, который образуется с использованием второй предварительно определенной псевдошумовой последовательности для модуляции четных частот этого символа и с использованием третьей предварительно определенной псевдошумовой последовательности для модуляции нечетных несущих этого символа. Этот второй обучающий ОЧУ-символ применяется для определения целой части смещения несущей частоты. Эта целая часть и положительная или отрицательная 3 дробная часть, определенная из первого обучающего ОЧУ-символа, используется для выполнения грубой синхронизации частоты. Для определения целой части смещения несущей частоты требуется быстрое преобразование Фурье обоих обучающих символов. Сущность изобретения Задачей настоящего изобретения является создание способов и устройства для выполнения грубой синхронизации частоты даже в случае смещений частоты, которые соответствуют нескольким интервалам между поднесущими в сигнале с модуляцией множества несущих. В соответствии с первым аспектом настоящего изобретения предлагается способ выполнения грубой синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора, в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезным символ и опорный символ,представляющий собой амплитудно-модулированную битовую последовательность, при этом способ включает этапы приема сигнала,преобразования принятого сигнала с понижением частоты,выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для получения огибающей,корреляции огибающей с предварительно определенной опорной характеристикой для определения девиации частоты несущей и управления частотой генератора, исходя из девиации частоты несущей. В соответствии со вторым аспектом настоящего изобретения заявлен способ выполнения на основе грубой синхронизации частоты компенсации девиации частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ,представляющий собой амплитудно-модулированную битовую последовательность, которая содержит две идентичных последовательности,причем способ включает этапы приема сигнала,преобразования принятого сигнала с понижением частоты,выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для получения огибающей, имеющей два участка соответственно упомянутым идентичным последовательностям,корреляции одного из участков огибающей с другим участком для определения девиации частоты несущей и управления частотой генератора, исходя из девиации частоты несущей. В соответствии с третьим аспектом настоящего изобретения заявлено устройство для 4 выполнения грубой синхронизации частоты,компенсирующей девиацию частоты несущей относительно частоты генератора, для системы демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, причем устройство содержит средство приема для приема сигнала,понижающий преобразователь для преобразования принимаемого сигнала с понижением частоты; амплитудный демодулятор для амплитудной демодуляции преобразованного с понижением частоты сигнала для получения огибающей,коррелятор для корреляции огибающей с предварительно определенной опорной характеристикой для определения девиации частоты несущей, и средство для управления частотой генератора, исходя из девиации частоты несущей. В соответствии с четвертым аспектом настоящего изобретения заявлено устройство для выполнения на основе грубой синхронизации частоты компенсации девиации частоты несущей относительно частоты генератора для системы демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей,по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, содержащую две идентичные последовательности, причем устройство содержит средство приема для приема сигнала,понижающий преобразователь для преобразования принимаемого сигнала с понижением частоты; амплитудный демодулятор для амплитудной демодуляции преобразованного с понижением частоты сигнала для получения огибающей, имеющий два участка соответственно упомянутым идентичным последовательностям,коррелятор для корреляции одного из участков огибающей с другим участком для определения девиации частоты несущей и средство для управления частотой генератора, исходя из девиации частоты несущей. Настоящее изобретение предлагает новую схему грубой синхронизации частоты, в частности, в системах ММН. Настоящее изобретение особенно полезно для систем, которые используют относительное кодирование и отображение по частотной оси. В соответствии с настоящим изобретением алгоритм грубой синхронизации частоты основан на опорном символе, который образован амплитудно-модулированной последовательностью. Длина этого символа амплитудно-модулированной последовательности может быть меньше длины полезного символа. Алгоритм, соответствующий настоящему изо 5 бретению, может быть использован во временной или частотной области. Для того чтобы определить смещение частоты, согласно первому варианту осуществления настоящего изобретения выполняется корреляция принятого символа ММН с предварительно определенной опорной характеристикой. Согласно второму варианту осуществления настоящего изобретения опорный символ содержит, по меньшей мере, две идентичные амплитудно-модулированные последовательности, и при этом смещение частоты определяется на основе корреляции между демодулированными участками, соответствующими этим идентичным последовательностям. Предпочтительно выбирать среднюю амплитуду опорного символа идентичной средней амплитуде оставшейся части сигнала, т.е. выбирать все дискретные значения демодулированной амплитудно-модулированной последовательности в середине их амплитудного диапазона. Необходимо специально выбирать постоянную времени блока автоматической регулировки усиления (АРУ) достаточно длинной, чтобы часть опорного символа, имеющая высокий уровень сигнала, не оказывала чрезмерное воздействие на сигнал автоматической регулировки усиления. В противном случае приходящий после амплитудно-модулированной последовательности сигнал будет сильно ослаблен. Согласно предпочтительным вариантам осуществления настоящего изобретения амплитудно-модулированная последовательность опорного символа выбирается в виде псевдослучайной битовой последовательности(ПСБП), так как такая последовательность имеет хорошие автокорреляционные свойства с отчетливым максимумом в корреляционном сигнале, который должен быть по возможности более широким. В соответствии с предпочтительными вариантами осуществления настоящего изобретения, грубая синхронизация частоты может быть выполнена с использованием амплитудномодулированной последовательности после того, как осуществлена кадровая синхронизация сигнала ММН. Алгоритм, соответствующий изобретению, работает как во временной, так и в частотной областях. Могут быть скорректированы смещения частоты, достигающие по величине 10-кратного интервала между несущими. Краткое описание чертежей В последующем описании предпочтительные варианты осуществления настоящего изобретения поясняются со ссылками на чертежи,на которых фиг. 1 - общий вид системы передачи с модуляцией множества несущих, содержащей блок грубой синхронизации частоты, соответствующий настоящему изобретению; 6 фиг. 2 - блок-схема, иллюстрирующая грубую синхронизацию частоты в соответствии с настоящим изобретением; фиг. 3 - общий вид опорного символа, содержащего две идентичные последовательности; фиг. 4 - общий вид типичного сигнала ММН со структурой кадра; фиг. 5 - блок-схема одного из вариантов осуществления блока грубой синхронизации частоты; фиг. 6 - блок-схема другого варианта осуществления блока грубой синхронизации частоты и фиг. 7 - блок-схема еще одного варианта осуществления блока грубой синхронизации частоты. Подробное описание предпочтительных вариантов осуществления изобретения Со ссылками на фиг. 1 ниже описан принцип работы системы передачи с модуляцией множества несущих. Хотя настоящее изобретение рассматривается с использованием системы ММН, показанной на фиг. 1, понятно, что настоящее изобретение может быть использовано совместно с различными способами передачи сигнала, если передаваемый сигнал содержит полезные символы и опорные символы. На фиг. 1 ссылочной позицией 100 обозначен передатчик ММН, который, по существу,аналогичен известным передатчикам ММН (см.,например, William Y. Zou,.Yiyan Wu, COFDM:AN OVERVIEW, IEEE Transactions on Broadcasting, vol. 41,1, March 1995). Источник 102 данных обеспечивает последовательный битовый поток 104 для передатчика ММН. Входящий последовательный битовый поток 104 подается в блок 106 отображения битов на несущую, который из входящего последовательного битового потока 104 создает последовательность спектров 108. Для создания сигнала ММН 112 во временной области над последовательностью спектров 108 выполняется обратное быстрое преобразование Фурье 110. Сигнал ММН временной области образует полезный символ ММН временного сигнала ММН. Для предотвращения межсимвольной интерференции, вызванной многолучевым искажением, для вставки защитного интервала фиксированной длины между соседними по времени символами ММН используется блок 114. В соответствии с предпочтительным вариантом осуществления настоящего изобретения последняя часть полезного символа ММН используется в качестве защитного интервала путем вставки того же интервала перед полезным символом. Результирующий символ ММН обозначен ссылочной позицией 115 на фиг. 1 и соответствует символу ММН 160, изображенному на фиг. 4. На фиг. 4 показана структура типового сигнала ММН со структурой кадра. Один кадр 7 временного сигнала ММН состоит из множества символов ММН 160. Каждый символ ММН 160 образован полезным символом 162 и связанным с ним защитным интервалом 164. Как показано на фиг. 4, каждый кадр содержит один опорный символ 166. Настоящее изобретение может быть предпочтительно использовано с таким сигналом ММН, однако, подобная структура сигнала не является необходимой для осуществления настоящего изобретения, если передаваемый сигнал включает полезную часть и, по меньшей мере, один опорный символ. Для получения окончательной структуры кадра, показанной на фиг. 4, для добавления опорного символа для каждого заранее определенного числа символов ММН используется блок 116. В соответствии с настоящим изобретением опорный символ представляет собой амплитудно-модулированную битовую последовательность. Следовательно, амплитудная модуляция битовой последовательности выполняется таким образом, чтобы огибающая амплитудномодулированной битовой последовательности определяла опорную структуру опорного символа. Эта опорная структура, определенная огибающей амплитудно-модулированной битовой последовательности, должна обнаруживаться при приеме сигнала ММН приемником сигнала ММН. В предпочтительном варианте осуществления настоящего изобретения в качестве битовой последовательности для амплитудной модуляции используется псевдослучайная битовая последовательность, имеющая хорошие автокорреляционные свойства. Выбор длины и частоты повторения опорного символа зависит от свойств канала, по которому передается сигнал ММН, например,времени когерентности канала. Кроме того, частота повторения и длина опорного символа или,другими словами, количество полезных символов в каждом кадре, зависит от технических характеристик, касающихся среднего времени первоначальной синхронизации и среднего времени повторной синхронизации после потери синхронизации из-за замирания в канале. Результирующий сигнал ММН, имеющий структуру, обозначенную ссылочной позицией 118 на фиг. 1, подается в ВЧ-блок 120 передатчика. В ВЧ-блоке 120 передатчика выполняется цифроаналоговое преобразование и преобразование с повышением частоты сигнала ММН,после чего сигнал ММН передается по каналу 122. Ниже со ссылками на фиг. 1 описан принцип работы приемника 130 сигнала ММН. Сигнал ММН принимается в ВЧ-блоке 132 приемника. В этом блоке сигнал ММН преобразуется с понижением частоты, а затем выполняется аналого-цифровое преобразование сигнала, преобразованного с понижением частоты. 8 Преобразованный с понижением частоты сигнал ММН подается в блок 134 синхронизации символьных кадров/частоты несущей. Первой задачей блока синхронизации символьных кадров/частоты несущей является выполнение кадровой синхронизации с использованием амплитудно-модулированного опорного символа. Кадровая синхронизация выполняется на основе корреляции между амплитуднодемодулированным опорным символом и предварительно определенной опорной характеристикой, хранящейся в приемнике сигнала ММН. Второй задачей блока синхронизации символьных кадров/частоты несущей является выполнение грубой синхронизации частоты сигнала ММН. С этой целью блок 134 синхронизации символьных кадров/частоты несущей используется в качестве блока грубой синхронизации частоты для определения грубого смещения частоты несущей, обусловленного, например,разницей частот между гетеродином передатчика и гетеродином приемника. Определенная частота используется для выполнения грубой коррекции частоты. Принцип работы блока грубой синхронизации частоты подробно описан ниже со ссылками на фиг. 2 и 3. Как описано выше, блок 134 кадровой синхронизации определяет положение опорного символа в сигнале ММН. На основе этого определения, осуществленного блоком 134 кадровой синхронизации, блок 136 выделения опорного символа выделяет информацию кадрирования,т.е. опорный символ, из сигнала ММН, поступающего от ВЧ-блока 132 приемника. После выделения опорного символа сигнал ММН подается в блок 138 удаления защитного интервала. Результатом обработки сигнала, выполненной в приемнике ММН, являются полезные символы ММН. Полезные символы ММН с выхода блока 138 удаления защитного интервала поступают в блок 140 выполнения быстрого преобразования Фурье для получения из полезных символов последовательности спектров. После этого последовательность спектров поступает в блок 142 отображения несущей в биты, в котором восстанавливается последовательный битовый поток. Этот последовательный битовый поток поступает в приемник 144 данных. Со ссылками на фиг. 2 и 3 ниже подробно описан принцип работы блока грубой синхронизации частоты. Как показано на фиг. 2, выход ВЧ-блока 132 приемника соединен с аналогоцифровым преобразователем 200. Преобразованный с понижением частоты сигнал на выходе аналогово-цифрового преобразователя 200 дискретизируется и подается в блок 202 кадровой/временной синхронизации. В предпочтительном варианте осуществления изобретения для устранения быстрых флуктуаций канала перед блоком кадровой/временной синхрониза 9 ции включен блок быстродействующей автоматической регулировки усиления (БАРУ) (не показан). Блок быстродействующей автоматической регулировки усиления используется в дополнение к обычному инерционному блоку автоматической регулировки усиления в канале прохождения сигнала в случае передачи по каналу с многолучевым распространением с длительной импульсной характеристикой канала и частотно-избирательным замиранием. Блок быстродействующей автоматической регулировки усиления регулирует диапазон средних амплитуд сигнала до известной средней амплитуды опорного символа. Как описано выше,блок кадровой/временной синхронизации использует амплитудно-модулированную последовательность в принятом сигнале для выделения из сигнала ММН информации о кадрировании и затем для удаления из сигнала защитных интервалов. За блоком 202 кадровой/временной синхронизации следует блок 204 грубой синхронизации частоты, который оценивает грубое смещение частоты на основе амплитудно-модулированной последовательности опорного символа сигнала ММН. Для выполнения коррекции смещения частоты в блоке 206, в блоке 204 грубой синхронизации частоты определяется смещение несущей частоты относительно частоты генератора в приемнике сигнала ММН. Упомянутая коррекция смещения частоты в блоке 206 выполняется при помощи комплексного умножения. Выходной сигнал блока 206 коррекции смещения частоты подается в демодулятор 208 сигнала ММН, образованный блоком 140 выполнения быстрого преобразования Фурье и блоком 142 отображения несущей в биты, которые показаны на фиг. 1. В любом случае, для осуществления грубой синхронизации частоты согласно изобретению должна быть выполнена амплитудная демодуляция прошедшего предварительную обработку сигнала ММН. Предварительной обработкой может являться, например, преобразование с понижением частоты и аналого-цифровое преобразование сигнала ММН. Результатом амплитудной демодуляции прошедшего предварительную обработку сигнала ММН является огибающая, представляющая собой амплитуду сигнала ММН. Для амплитудной демодуляции может быть использован простой способ alphamax+Routine Computers Magnitude, EDN, Oct. 26,1989; and Adams, W.Т., and Bradley, J.: Magnitude Approximations for Microprocessor Implementation, IEEE Micro, Vol. 3,5, Oct. 1983). Понятно, что могут быть использованы и другие способы определения амплитуды, отличные от способа alphamax+ betamin-. Для упрощения можно свести вычисление амплитуды к определению того, является ли текущая ампли 002529 10 туда большей или меньшей по отношению к средней амплитуде. В этом случае выходной сигнал будет состоять из последовательности-1/+1, которая может применяться для определения грубого смещения частоты с использованием корреляции. Определение этой корреляции может легко осуществляться с использованием простой интегральной микросхемы. Кроме того, может быть выполнена супердискретизация (с повышенной частотой) сигнала, принятого высокочастотным входным каскадом. Например, принятый сигнал может быть выражен с использованием двукратной супердискретизации. В соответствии с первым вариантом осуществления настоящего изобретения смещение частоты несущей сигнала ММН относительно частоты генератора в приемнике сигнала ММН определяется при помощи корреляции огибающей, полученной путем выполнения амплитудной демодуляции, как описано выше, с предварительно определенной опорной характеристикой. В случае, когда смещение частоты отсутствует, принятый опорный символ r(k) будет иметь следующий вид:(1) где n(k) обозначает аддитивный Гауссовский шум,аAM(амплитудно-модулированную)-последовательность. Для упрощения вычислением аддитивного Гауссовского шума можно пренебречь. Тогда:(2) В случае если имеется постоянное смещение частоты f, принятый сигнал будет иметь следующий вид: Информация смещения частоты определяется из корреляции принятого сигнала r(k) с АМ-последовательностью SAM, которая в приемнике известна Следовательно, смещение частоты Так как аргумент смещение частоты равен нулю, Согласно второму варианту осуществления алгоритма грубой синхронизации частоты в соответствии с настоящим изобретением, как показано на фиг. 3, используется опорный символ, содержащий, по меньшей мере, две идентичные последовательности 300. На фиг. 3 показан опорный символ сигнала ММН, содержащий две идентичные последовательности 300,каждая длиной L/2. L обозначает количество значений двух последовательностей 300 опорного символа. 11 Как показано на фиг. 3 в амплитудномодулированной последовательности имеется,по меньшей мере, две идентичных зоны, предназначенных для грубой синхронизации частоты. Две такие зоны, каждая из которых содержит L/2 дискретных значений, показаны на фиг. 3 в конце амплитудно-модулированной последовательности. Амплитудно-модулированная последовательность содержит большое количество дискретных значений. Для однозначного определения фазы должно быть использовано число дискретных значений, достаточное для содержания изменения фазы на 2. На фиг. 3 это число определено как L/2. Далее представлено математическое решение для определения девиации частоты несущей. В соответствии с фиг. 3 для двух идентичных последовательностей 300 применимо следующее уравнение:(7) Если смещение частоты отсутствует, принятому сигналу будет соответствовать уравнение 8r(k) обозначает значения из идентичных последовательностей, k представляет собой индекс от единицы до L/2 для соответствующих дискретных значений. Если имеется смещение частоты, например, f, принятый сигнал будет иметь вид(k) обозначает дискретные значения для принятого участка, которые основаны на идентичных последовательностях. Информация, относящаяся к смещению частоты, может быть получена из корреляции принятого сигнала(k+L/2) с принятым сигналом(k). Эта корrr реляция определяется следующим уравнением:r значения для дискретных значений упомянутого выше участка. Таким образом, смещение частоты Так как аргумент r(k)2 равен нулю, смещение частоты определяется в следующем виде: Таким образом, понятно, что в обоих описанных выше вариантах частотное положение максимума выходного результата корреляции определяет оценку значения смещенной несущей. Кроме того, как показано на фиг. 2, коррекция выполняется в прямом направлении. Устройство для выполнения грубой синхронизации частоты с использованием описанного выше опорного символа, содержащего две 12 идентичных зоны длиной L/2 каждая, показано на фиг. 5. На фиг. 5 также показан блок 202 кадровой/временной синхронизации. Как следует из чертежа, перед блоком кадровой/временной синхронизации может быть включен блок 400 выполнения быстродействующей автоматической регулировки усиления (постоянная временидлительности символа ММН). Выход блока 202 кадровой/временной синхронизации соединен с блоком 402 выделения, который используется для выделения последних L дискретных значений из опорного символа. Выход блока 402 выделения соединен с демультиплексором 404,который выделяет две идентичные зоны, длинойL/2 каждая, из L дискретных значений. Идентичные зоны подаются в коррелятор 406, который выполняет корреляцию, как описано выше. Выход коррелятора 406 соединен с функциональным блоком 408 для выполнения операции расчета аргумента для выходного сигнала коррелятора 406. Выход функционального блока 409 соединен с умножителем 410, который умножает выходной сигнал на 1/(2(L/2)ТMCM). Далее включен функциональный блок 412, выполняющий операцию вычисления для получения частотного сдвига для всего символа ММН из частотного сдвига,определенного для участка, имеющего длину L,т.е. идентичных зон 300, показанных на фиг. 3. В случае канала с сильным уровнем отражения, например из-за высокой плотности застройки, описанных выше корреляций может быть недостаточно для получения приемлемой грубой синхронизации частоты. Следовательно,согласно третьему варианту осуществления настоящего изобретения соответствующие значения двух участков, которые коррелируются согласно второму варианту осуществления, могут быть взвешены с использованием соответствующих значений сохраненных предварительно определенных опорных характеристик, соответствующих упомянутым двум идентичным последовательностям опорного символа. Это взвешивание может увеличить до максимума вероятность правильного определения смешения частоты. Математическое описание этого взвешивания имеет видSAM обозначает амплитудно-модулированную последовательность, которая в приемнике известна, а SAM обозначает ее комплексно сопряженное значение. Если вышеприведенные корреляции вычисляются в частотной области, то используется не аргумент, а величина Определяется максимальное значение этой величины как функция коррекции частоты. Положение максимума определяет оценку девиа 13 ции частоты. Как упомянуто выше, коррекция выполняется в прямом направлении. Блок-схема устройства для выполнения грубой синхронизации частоты согласно третьему варианту осуществления настоящего изобретения показана на фиг. 6. Блоки 400, 202, 402, 404 и 406, показанные в левой части фиг. 6, аналогичны соответствующим блокам на фиг. 5. В правой части на фиг. 6 изображено формирование известной АМ-последовательности. Известная АМпоследовательность считывается из памяти 420 и подается в блок 422 выделения, который выделяет из нее последние L дискретных значений. Выход блока 422 выделения соединен с демультиплексором 424, имеющим один вход и два выхода для выделения идентичных зон,имеющих длину L/2 каждая. Оба выхода демультиплексора соединены с коррелятором 426,который выполняет корреляцию между двумя идентичными зонами. Умножитель 428 предназначен для умножения выходного сигнала коррелятора 406 на выходной сигнал коррелятора 426. Выход умножителя 428 соединен с функциональным блоком 408 для вычисления аргумента. Выходной сигнал умножителя подается последовательно в функциональный блок 408 для вычисления аргумента, умножитель 410 и функциональный блок 412. Принцип работы этих блоков аналогичен принципу работы соответствующих блоков, показанных на фиг. 5. На фиг. 7 показана альтернативная структура устройства для выполнения грубой синхронизации частоты в частотной области согласно третьему варианту осуществления настоящего изобретения. Как показано на фиг. 7,между демультиплексором 404 и коррелятором 442 включен блок 440 выполнения быстрого преобразования Фурье, а между демультиплексором 424 и коррелятором 426 включен блок 444 выполнения быстрого преобразования Фурье. Выходы корреляторов 442 и 446 соединены с умножителем 445. Выход умножителя 445 соединен с блоком 447 поиска максимума. В конце включен блок 448 для выполнения операции вычисления. Выходной сигнал блока 448 представляет собой выходной сигнал устройства грубой синхронизации частоты. В случае выполнения грубой синхронизации частоты в частотной области, можно использовать для грубой синхронизации частоты существующее быстрое преобразование Фурье на начальном этапе приема сигнала, а не включить дополнительный блок выполнения быстрого преобразования Фурье. После описанной выше грубой синхронизации частоты может быть выполнена точная синхронизация частоты, в случае, если подобная точная синхронизация частоты является целесообразной. 14 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ выполнения грубой синхронизации частоты, компенсирующий девиацию частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, причем способ включает этапы приема сигнала,преобразования принятого сигнала с понижением частоты,выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей,корреляции огибающей с предварительно определенной опорной характеристикой для определения девиации частоты несущей и управления частотой генератора, исходя из девиации частоты несущей. 2. Способ по п.1, отличающийся тем, что девиация частоты несущей определяется следующим образом где- значения огибающей принятого сигнала,rSAM - комплексно-сопряженные значения предварительно определенной опорной характеристики,ТMCM - длительность полезного символа,k - индекс иL/2 - половина длины последовательности,используемой для грубой синхронизации частоты. 3. Способ выполнения, на основе грубой синхронизации частоты, компенсации девиации частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, которая содержит две идентичных последовательности, причем способ включает этапы приема сигнала,преобразования принятого сигнала с понижением частоты,выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей, имеющей два участка, основанные на упомянутых идентичных последовательностях,корреляции одного из участков огибающей с другим из участков для определения девиации частоты несущей и управления частотой генератора, исходя из девиации частоты несущей. 4. Способ по п.3, отличающийся тем, что этап корреляции дополнительно содержит взвешивание соответствующих значений упо 15 мянутых двух участков с соответствующими значениями упомянутых двух последовательностей. 5. Способ по п.3, отличающийся тем, что девиация частоты несущей определяется следующим образом: где- значения упомянутых участков,r- комплексно-сопряженные значенияL - количество значений двух последовательностей опорного символа. 6. Способ по п.4, отличающийся тем, что девиация частоты несущей определяется следующим образом:L - количество значений двух последовательностей опорного символа,SAM - значения упомянутых идентичных последовательностей иSAM - комплексно-сопряженные значения упомянутых идентичных последовательностей. 7. Способ по п.1, отличающийся тем, что сигнал представляет собой сигнал с ортогональным частотным уплотнением. 8. Способ по п.1, отличающийся тем, что перед этапом выполнения амплитудной демодуляции дополнительно включает выполнение быстродействующей автоматической регулировки усиления принятого и преобразованного с понижением частоты сигнала. 9. Способ по п.1, отличающийся тем, что этап выполнения амплитудной демодуляции включает вычисление амплитуды сигнала с использованием способа аlрhаmах+ betamin-. 10. Способ по п.1, отличающийся тем, что дополнительно включает этапы выборки соответствующих амплитуд принятого и преобразованного с понижением частоты сигнала и сравнения выбранных амплитуд с предварительно определенным пороговым значением для формирования битовой последовательности для выполнения упомянутой амплитудной демодуляции. 11. Способ по п.10, отличающийся тем, что этап выборки соответствующих амплитуд принятого и преобразованного с понижением частоты сигнала дополнительно включает выполнение супердискретизации принятого и преобразованного с понижением частоты сигнала. 12. Устройство для выполнения грубой синхронизации частоты, компенсирующей де 002529 16 виацию частоты несущей относительно частоты генератора, для системы демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-демодулированную битовую последовательность, причем устройство содержит средство для приема сигнала,понижающий преобразователь для преобразования принимаемого сигнала с понижением частоты,амплитудный демодулятор для выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей,коррелятор для корреляции огибающей с предварительно определенной опорной характеристикой для определения девиации частоты несущей и средство для управления частотой генератора, исходя из девиации частоты несущей. 13. Устройство по п.12, отличающееся тем,что содержит средство для определения девиации частоты несущей следующим образом: где ла,- значения огибающей принятого сигнаSAM - комплексно-сопряженные значения предварительно определенной опорной характеристики,ТMCM - длительность полезного символа,k - индекс иL/2 - количество значений опорной характеристики. 14. Устройство для выполнения, на основе грубой синхронизации частоты, компенсации девиации частоты несущей относительно частоты генератора для системы демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, которая содержит две идентичные последовательности, причем устройство содержит средство для приема сигнала,понижающий преобразователь для преобразования принимаемого сигнала с понижением частоты,амплитудный демодулятор для выполнения амплитудной демодуляции преобразованного с понижением частоты сигнала для формирования огибающей, имеющей два участка, которые основаны на упомянутых идентичных последовательностях,коррелятор для корреляции одного из участков огибающей с другим из участков для определения девиации частоты несущей и средство для управления частотой генератора, исходя из девиации частоты несущей. 17 15. Устройство по п.14, отличающееся тем,что коррелятор содержит средство для взвешивания соответствующих значений упомянутых двух участков с использованием соответствующих значений упомянутых двух последовательностей. 16. Устройство по п.13, отличающееся тем,что содержит средство для определения девиации частоты несущей следующим образом: где- значения упомянутых участков,r- комплексно-сопряженные значенияL - количество значений двух последовательностей опорного символа. 17. Устройство по п.15, отличающееся тем,что содержит средство для определения девиации частоты несущей следующим образом: где- значения упомянутых участков,r- комплексно-сопряженные значенияr упомянутых участков,ТMCM - длительность полезного символа,k - индекс,L - количество значений двух последовательностей опорного символа, 002529SAM - значения упомянутых идентичных последовательностей иSAM - комплексно-сопряженные значения упомянутых идентичных последовательностей. 18. Устройство по п.13, отличающееся тем,что сигнал представляет собой сигнал с ортогональным частотным уплотнением. 19. Устройство по п.13, отличающееся тем,что дополнительно содержит перед амплитудным демодулятором средство для выполнения быстродействующей автоматической регулировки усиления принятого и преобразованного с понижением частоты сигнала. 20. Устройство по п.13, отличающееся тем,что амплитудный демодулятор содержит средство для вычисления амплитуды сигнала с использованием способа alphamax+ betamin-. 21. Устройство по п.13, отличающееся тем,что дополнительно содержит средство для выборки соответствующих амплитуд принятого и преобразованного с понижением частоты сигнала, причем амплитудный демодулятор содержит средство для сравнения выбранных амплитуд с заранее определенным пороговым значением для формирования битовой последовательности. 22. Устройство по п.21, отличающееся тем,что средство для выборки содержит средство для супердискретизации принятого и преобразованного с понижением частоты сигнала.
МПК / Метки
МПК: H04L 27/26
Метки: несущих, синхронизация, множеством, системах, грубая, частоты
Код ссылки
<a href="https://eas.patents.su/11-2529-grubaya-sinhronizaciya-chastoty-v-sistemah-s-mnozhestvom-nesushhih.html" rel="bookmark" title="База патентов Евразийского Союза">Грубая синхронизация частоты в системах с множеством несущих</a>
Коррекция смещения фазы эхо-сигнала в системе демодуляции множества несущих
Номер патента: 2528
Опубликовано: 27.06.2002
Авторы: Герхойзер Хайнц, Буххольц Штефан, Фишер Роберт, Хойбергер Альберт, Липп Штефан, Бадри Сабах, Эберляйн Эрнст
МПК: H04L 27/26
Метки: фазы, коррекция, множества, системе, эхо-сигнала, несущих, смещения, демодуляции
Формула / Реферат:
1. Способ коррекции смещения фазы эхо-сигнала в системе демодуляции множества несущих, включающий этапы, при которых выполняют дифференциальное фазовое декодирование (142) сдвигов по фазе на основе разности фаз между одновременно используемыми несущими, имеющими различные частоты, определяют смещение фазы эхо-сигнала для каждого декодированного сдвига по фазе путем устранения (500) неопределенностей сдвигов по фазе, которые относятся к...
Система преобразования частоты для параболических антенн
Номер патента: 2005
Опубликовано: 22.10.2001
Автор: Лотфи Камаль
МПК: H01Q 1/24
Метки: параболических, частоты, преобразования, система, антенн
Формула / Реферат:
1. Система преобразования частоты для параболической антенны, которая предназначена для приема сигналов с линейными вертикальной и горизонтальной поляризациями, передаваемых двумя геостационарными спутниками, которые находятся на небольшом расстоянии друг от друга, и выполнена согласно варианту, содержащему два устройства преобразования частоты, предназначенные для приема сигнала, поступающего от одного спутника, при этом каждое устройство...
Источник антенны для передачи и приема волн сверх высокой частоты
Номер патента: 492
Опубликовано: 26.08.1999
Авторы: Бло Жан-Пьер, Эстрад Жерар, Каммуни Алекси, Крюшон Жан-Клод
МПК: H01P 1/16
Метки: антенны, передачи, сверх, высокой, источник, приема, волн, частоты
Формула / Реферат:
1. Источник антенны для передачи и приема волн сверхвысоких частот, содержащий преобразователь для разделения передаваемых и принимаемых сигналов с различными частотами, отличающийся тем, что преобразователь содержит волновод (26) с квадратным сечением, один конец которого соединен с излучающим элементом, другой конец которого соединен с каналом передачи, причем канал передачи содержит волновод с круговым сечением, который оканчивается внутри...
Способ формирования изображения в системах с перемещающимися относительно друг друга объектами
Номер патента: 2077
Опубликовано: 24.12.2001
Автор: Курганов Игорь Петрович
МПК: G09F 9/302
Метки: системах, перемещающимися, формирования, объектами, способ, друг, изображения, относительно, друга
Формула / Реферат:
1. Способ формирования изображения в системах с перемещающимися относительно друг друга объектами, заключающийся в том, что - каждый кадр изображения формируют с помощью развертки отдельным устройством формирования изображения, каждое из которых установлено неподвижно относительно других устройств формирования изображения, и - синхронизируют начало развертки каждого кадра формируемого изображения с моментом попадания объекта, принимающего...
Двигатель внутреннего сгорания с поршнями возвратно-поступательного хода с кривошипом и множеством круговых блоков скольжения
Номер патента: 287
Опубликовано: 25.02.1999
Авторы: Ли Минг, Ли Женгжонг
МПК: F02B 75/32
Метки: внутреннего, круговых, кривошипом, поршнями, скольжения, сгорания, хода, двигатель, множеством, блоков, возвратно-поступательного
Формула / Реферат:
1. Двигатель внутреннего сгорания с поршнями возвратно-поступательного хода с кривошипом и множеством круговых блоков скольжения, содержащий механизм с кривошипом и круговым блоком скольжения, включающий цилиндрический корпус, головки цилиндров, цилиндры, поршни, круговые блоки скольжения и маховик; систему подачи топлива; систему смазки; систему охлаждения, отличающийся тем, что он имеет в цилиндрическом корпусе скользящую направляющую, при...
Предыдущий патент: Коррекция смещения фазы эхо-сигнала в системе демодуляции множества несущих
Следующий патент: Гелеобразная фармацевтическая композиция, способ её получения и применение
Случайный патент: Контейнер для пищевых продуктов или напитков