Усовершенствования в системах радиопозиционирования
Номер патента: 3597
Опубликовано: 26.06.2003
Авторы: Хансен Пол, Даффетт-Смит Питер Джеймс, Брайс Джеймс Пол


Формула / Реферат
1. Способ определения местоположения приeмников, местоположения которых ещe не известны, в сети источников передач, местоположения некоторых или всех из которых известны, включающий в себя следующие шаги:
(а) в первый момент времени измерение первого набора сдвигов по времени или фазе между сигналами, принятыми первым приемником, местоположение которого ещe не известно, от множества источников передач, и сигналом, принятым первым приемником от другого из упомянутых источников передач или опорного источника;
(б) в выбранный второй момент времени измерение второго набора сдвигов по времени или фазе между сигналами, принятыми вторым приемником, местоположение которого ещe не известно, от множества источников передач, и сигналом, принятым вторым приемником от другого из упомянутых источников передач или опорного источника; и
(в) вычисление местоположений первого и второго приемников из соотношения между указанными первым и вторым наборами сдвигов.
2. Способ по п.1, отличающийся тем, что первое и второе времена одинаковы.
3. Способ по п.1 или 2, отличающийся тем, что в выбранные дополнительные моменты времени измеряются соответствующие относительные сдвиги по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым приемником, или вторым приемником, или иным приемником или приемниками, местоположение или местоположения которых еще не известны, от множества источников передач; и с помощью этих измерений и известных местоположений источников передач определяется местоположение любого или всех приемников.
4. Способ по п.3, отличающийся тем, что любой из выбранных моментов времени является тем же, что и любой другой из выбранных моментов времени.
5. Способ по любому из пп.1-4, отличающийся тем, что упомянутые приемники являются мобильными телефонами системы GSM, причем все или каждый мобильный телефон имеет свое тактирование, заранее синхронизированное с обслуживающей базовой приемопередающей станцией (БППС).
6. Способ по п.5, отличающийся тем, что дополнительно включает в себя
(г) измерение в первый момент времени относительных сдвигов по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым мобильным телефоном от необслуживающей БППС;
(д) измерение в выбранный второй более поздний момент времени относительных сдвигов по времени или фазе соответственно по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых вторым мобильным телефоном от необслуживающей БППС;
(е) вычисление местоположения любого мобильного телефона, или изменения в местоположении первого мобильного телефона между первым и вторым моментами времени, или состояния перемещения любого мобильного телефона в первый или второй моменты времени из соотношения между первым и вторым наборами данных.
7. Система для определения местоположений приемников, местоположения которых еще не известны, в сети источников передач, местоположения некоторых или всех из которых известны, содержащая
(а) средство для измерения в первый момент времени относительных сдвигов по времени или фазе между сигналами, принятыми первым приемником, местоположение которого еще не известно, от множества источников передач, и сигналом, принятым первым приемником от другого из источников передач или опорного источника;
(б) средство для измерения в выбранный второй момент времени второго набора сдвигов по времени или фазе между сигналами, принятыми вторым приемником, местоположение которого еще не известно, от множества источников передач, и сигналом, принятым вторым приемником от другого из источников передач или опорного источника; и
(в) средство для вычисления местоположений первого и второго приемника из соотношения между указанными первым и вторым наборами сдвигов.
8. Система по п.7, отличающаяся тем, что дополнительно содержит
(г) средство для измерения в выбранные дополнительные моменты времени соответствующих сдвигов по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым приемником, или вторым приемником, или иным приемником или приемниками, местоположение или местоположения которых еще не известны, от множества источников передач; и
д) средство для вычисления местоположения любого или всех приемников с помощью этих измерений и известных местоположений источников передач.
9. Система по п.7 или 8, отличающаяся тем, что упомянутое средство для измерения и упомянутое средство для вычисления включают в себя микропроцессор в одном или более из упомянутых приемников.
10. Система по любому из пп.7-9, отличающаяся тем, что содержит компонент или компоненты системы GSM.
11. Система по п.10, отличающаяся тем, что включает в себя один или более мобильных телефонов, причем все или каждый мобильный телефон имеет свое тактирование, заранее синхронизированное с обслуживающей БППС.
12. Система по п.11, отличающаяся тем, что дополнительно содержит
(е) средство для измерения в первый момент времени относительных сдвигов по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым мобильным телефоном от необслуживающей БППС;
(ж) средство для измерения в выбранный второй момент времени относительных сдвигов по времени или фазе соответственно по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых вторым мобильным телефоном от необслуживающей БППС;
з) средство для вычисления местоположений первого и второго мобильных телефонов из соотношения между первым и вторым наборами сдвигов.

Текст
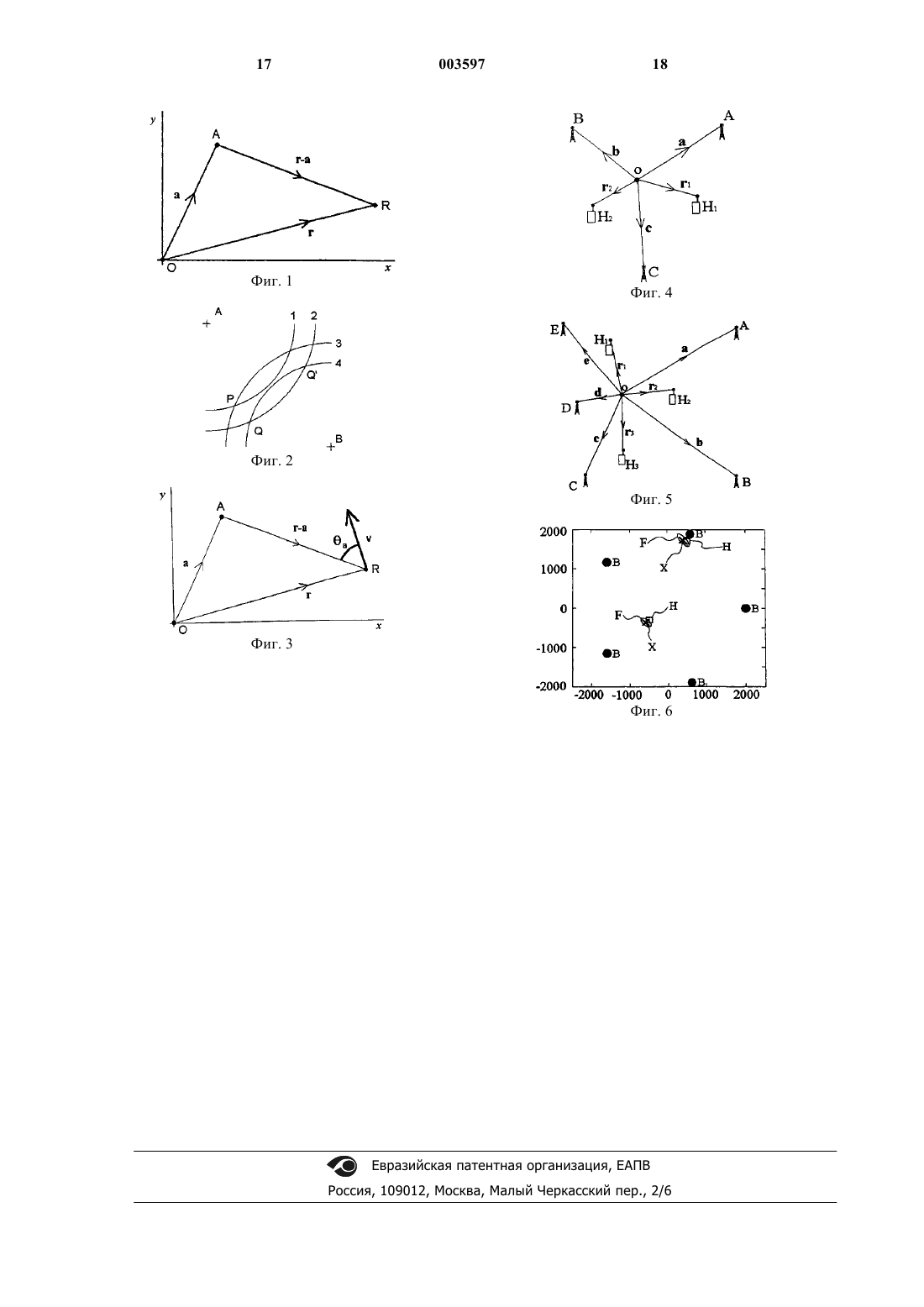
1 Настоящее изобретение относится к усовершенствованиям в системах радиопозиционирования и их способам работы и в частности к использованию сетей несинхронизированных передатчиков, не требующих дополнительных приемников контроля. Заявка ЕПВ 0303371, содержание которой включено сюда посредством ссылки, описывает систему радионавигации и сопровождения, которая использует независимые радиопередатчики, установленные для иных целей. Сигналы от каждого передатчика, взятые по отдельности, принимаются двумя принимающими станциями, одна из которых имеет фиксированное известное местоположение, а другая установлена на подвижном объекте, местоположение которого подлежит определению. Представление сигналов, принятых в одной принимающей станции, посылается по линии на процессор в другой принимающей станции, где принятые сигналы сравниваются для нахождения их разностей фаз или временных задержек. Три таких измерения, выполненные для трех широко разнесенных независимых передатчиков, достаточны для определения местоположения подвижного приeмника по двум координатам, т.е. его местоположения на земле. Определяется также фазовый или временной сдвиг между задающими генераторами в двух приемниках. Система "CURSOR", описанная в заявке ЕПВ 0303371, представляет собой систему радиопозиционирования, которая может использовать сигналы, излученные существующими несинхронизированными радиопередатчиками, для определения местоположения портативного приемника. В отличие от некоторых других систем, которые используют свойство временной когерентности сетей, состоящих из предназначенных для этих целей синхронизированных передатчиков, CURSOR использует пространственную когерентность сигналов, передаваемых отдельными передатчиками. В последующей разработке (см. заявки ЕПВ и РСТ 0880712 и WO 99/21028) применeн метод нахождения местоположения мобильного телефона в системе GSM и другой цифровой телефонной системе и представлены примеры способа "Усиленной разности наблюдаемых времен" (У-РНВ) с помощью сигналов нисходящей линии связи, переданных сетью базовых приемопередающих станций (БППС) телефонной системы. В цифровой мобильной телефонной системе,описанной в заявке ЕПВ 0880712, содержание которой включено сюда посредством ссылки, сигналы от каждой БППС в диапазоне удаления мобильного телефона принимаются как самим телефоном, так и стационарным расположенным поблизости приeмником, блоком измерения местоположения (БИМ), местоположение которого известно точно. Представления принятых сигналов 2 передаются в центр определения местоположения мобильных устройств (ЦММ), где они сравниваются по порядку для определения временной разности между ними. Фиг. 1 показывает геометрию стандартной двухкоординатной системы. Начало декартовых координат х и y совпадает с БИМ,расположенным в О. Ориентация осей несущественна, но может быть, как правило, установлена так, чтобы ось у лежала вдоль направления северюг местной картографической сетки. Мобильный телефон R находится в точке, определяемой вектором местоположения r по отношению к местоположению О БИМ. БППС А показана в точке,определяемой вектором местоположения а. Рассмотрим сначала сигналы от БППС А. Временная разность ta, измеренная между сигналами, принятыми в R и О, задается выражениемta=(r-a-а)/+,где- скорость радиоволн,- это временной сдвиг синхросигналов между синхросигналами в приемниках R и О, а вертикальные штрихи с каждой стороны векторных величин означают, что это абсолютная величина тех векторов, которые используются в уравнении. Величинапредставляет ошибку синхронизации между измерениями, выполненными двумя приемниками. Аналогично можно записать для двух других БППС (В и С) в векторных местоположениях b и с (не показаны)tc=(r-с-c)/+. Значения ta, tb, tc измеряются способами, раскрытыми в заявке ЕПВ 0880712, а значения а, b, с иизвестны. Следовательно,уравнения (1) могут быть решены для нахождения местоположения r мобильного телефона вместе со значением . В заявке РСТWO 99/21028, содержание которой включено сюда посредством ссылки,описывается, как можно измерить эти самые временные сдвиги с помощью локально созданных шаблонов в телефонной системе GSM следующим образом. Предположим, что мобильный телефон R записал короткий пакет сигналовGSM от БППС А. В этой записи содержатся кадровая структура, пакеты синхронизации и иные "заданные" данные (или заранее заданные значения), которые являются постоянными признаками этих передач. Процессор в мобильном телефоне может создавать согласующиеся шаблоны на основе известной структуры сетевых сигналов. Принятые сигналы могут затем согласовываться с локально созданным шаблоном. Когда шаблон обнаруживает совпадение, корреляционный пик в положении наилучшего совпадения соответствует временному сдвигу между принятыми сигналами и местными синхросигналами в мобильном телефоне. Для сигналов, излучeнных из БППС А, этот измеренный временной сдвиг ta1 задаeтся выражениемta1=(r-а)/+a+1,где a - временной сдвиг передач БППС A, a 1 временной сдвиг сигналов внутреннего времени мобильного телефона, оба сдвига определены относительно сигналов воображаемого универсального "абсолютного" времени. Сигналы от БППС В и С также могут быть измерены таким же образом, в результате чего получим выраженияtc1=(r-c)/+c+1. Такие же измерения можно также выполнить в БИМ, что дастtc2=(c)/+c+2,где 2 - временной сдвиг сигналов внутреннего времени БИМ относительно одного и того же воображаемого универсального абсолютного времени. Вычитая уравнения (3) из уравненийtc=tc1-tc2=(r-c-c)/+,(4) где =1-2. Следует отметить, что уравнения (4) в точности такие же, как и уравнения (1) , и могут быть решены таким же образом, чтобы найти местоположение r мобильного телефона и значение . Описанные выше способы измеряют временные сдвиги. Однако иногда полезно измерять фазовые сдвиги, частотные сдвиги или производные от частотных сдвигов, как описывается дальше. Ясно, что способ CURSOR вместе со всеми другими способами, которые используют сигналы от несинхронизированных передатчиков,требует, чтобы в области покрытия телефонной системы была установлена сеть БИМ. Эти блоки действуют как опорные точки, в которых несинхронизированные сигналы, излученные из БППС, измеряются для сравнения с такими же сигналами, принятыми мобильным телефоном. В другой патентной заявке (ссылочный номерMJB06733WO), поданной одновременно с данной заявкой, заявитель показывает, как вся сеть БППС может быть покрыта с помощью всего лишь одного "виртуального БИМ", который действует как сервисный узел для всех данных от БИМ. Настоящее изобретение показывает,как способ CURSOR (или иной У-РНВ способ) может применяться, не требуя сети реальных БИМ. Согласно первому аспекту этого изобретения предложен способ определения местоположения или изменения в местоположении или состояния перемещения приeмника или приeмников, местоположение или изменение в 4 местоположении или состояние перемещения которого или которых ещe не известно или не известны, в сети источников передач, местоположения некоторых или всех из которых известны, включающий в себя следующие шаги:(а) в первый момент времени измерение относительных сдвигов по времени, фазе, частоте или их производным по отношению друг к другу или по отношению к опорному источнику в каждом приeмнике для сигналов, принятых первым приeмником, местоположение или состояние перемещения которого ещe не известно,от множества источников передач;(б) в выбранный второй момент времени измерение соответствующих сдвигов для сигналов, принятых тем же самым или вторым приeмником, местоположение или состояние перемещения которого ещe не известно, от множества источников передач; и(в) вычисление местоположения приeмника или приeмников в первый и второй моменты времени, или изменения в местоположении первого приeмника между первым и вторым моментами времени, или состояния перемещения любого приeмника из соотношения между первым и вторым наборами относительных сдвигов."Состояние перемещения" означает функцию перемещения приeмника, в том числе его скорость, ускорение, скорость изменения ускорения и т.п. Относительные сдвиги по времени, фазе,частоте или их производным по отношению друг к другу или по отношению к опорному источнику для сигналов, принятых первым или вторым приeмниками от множества источников передач, могут быть представлены соответствующими сдвигами или разностями в расстояниях между источниками передач и первым или вторым приeмниками. Следует иметь в виду, что если второе время измеряется во втором приемнике, то первый и второй моменты времени могут совпадать. В выбранные дополнительные моменты времени могут измеряться соответствующие относительные сдвиги по времени, фазе, частоте или их производные по отношению друг к другу или по отношению к опорному источнику для сигналов, принятых первым приeмником, или вторым приeмником, либо иным приeмником или приeмниками, местоположения, изменения в местоположении или состояние перемещения которых ещe не известны, от множества источников передач; и с помощью этих измерений и известных местоположений источников передач могут определяться местоположение, или изменение местоположения, или состояние перемещения любого или всех приeмников. В указанном выше аспекте следует иметь в виду, что любой из выбранных моментов вре 5 мени может быть таким же, как любой другой из выбранных моментов времени. Изобретение также включает в себя систему для осуществления способа, которая может включать в себя приeмники, управляемые компьютерами или микропроцессорами, запрограммированными соответствующим образом. Примеры способа и системы согласно настоящему изобретению описаны со ссылками на чертежи, на которых показано следующее: фиг. 1 - геометрия стандартной двухкоординатной системы; фиг. 2 - диаграмма, представляющая земную поверхность (предполагаемую плоской) вблизи пары блоков БППС; фиг. 3 - иллюстрация геометрии стандартной двухкоординатной системы; фиг. 4 - представление цифровой мобильной телефонной сети с двумя мобильными телефонами и тремя БППС, включающей в себя систему согласно данному изобретению; фиг. 5 - цифровая мобильная телефонная сеть с тремя мобильными телефонами и пятью БППС, включающая в себя систему согласно данному изобретению; фиг. 6 - гипотетическая сеть GSM с БППС и мобильными телефонами. Для того чтобы проиллюстрировать один пример, в котором передатчики и приeмники являются частью цифровой мобильной телефонной сети, предположим, что мобильный телефон находится в местоположении, определяемом вектором r(t1) в момент времени t1. Тогда уравнения (2) примут видta1(t1)=(r(t1)-a)/+a(t1)+1(t1),tb1(t1)=(r(t1)-b)/+b(t1)+1(t1),tc1(t1)=(r(t1)-c)/+c(t1)+1(t1), (5) где a(t1) - временной сдвиг передач БППС от A,b(t1) - временной сдвиг от В, c(t1) - временной сдвиг от С, a 1(t1) - временной сдвиг сигнала внутреннего времени мобильного телефона, все измеренные в момент времени t1 относительно воображаемого универсального "абсолютного" времени. Теперь, если мобильный телефон находится в другом местоположении, определяемом вектором r(t1) в более поздний момент времени t2, уравнения (2) примут видta1(t1)-ta1(t2)=(r(t1)-a-r(t2)-a)/+(a(t1)-a(t2+(1(t1)-1(t2,tb1(t1)-tb1(t2)=(r(t1)-b-r(t2)-b)/+(b(t1)-b(t2+(1(t1)-1(t2,tc1(t1)-tc1(t2)=(r(t1)-c-r(t2)-c)/+(c(t1)-c(t2+(1(t1)-1(t2.(7) Как отмечено выше, передачи БППС в сети GSM или иной цифровой сети обычно не синхронизированы. Однако БППС обычно снабжены высокостабильными генераторами и сигналы часто привязаны к общему опорному источнику тактирования. Если это имеет место, 003597 6 сигналы поддерживают постоянный временной сдвиг по отношению друг к другу, так что(a(t1)-a(t2, (b(t1)-b(t2 и (c(t1)-c(t2. (Даже если это не имеет места, сигналы БППС часто достаточно стабильны, чтобы дать возможность оценить эти разности в сервисном узле или ином сетевом элементе.) Записывая ta=ta1(t1)ta1(t2), tb=tb1(t1)-tb1(t2), tc=tc1(t1)-tc1(t2) иtc=(r(t1)-c-r(t2)-c)/+. Уравнения (8) можно пояснить графически с помощью фиг. 2, где представлена земная поверхность (предполагаемая плоской) вблизи двух блоков А и В БППС. В первом из этих уравнений член r(t1)-a представляет расстояние мобильного телефона от А в момент времени t1,а член r(t2)-a представляет его расстояние в момент t2. Первое из уравнений (8) можно переписать какr(t1)-a-r(t2)-a=ta-,которое представляет геометрические места точек двух концентрических окружностей с центром в А, радиусы которых отличаются наtа-. Они помечены соответственно цифрами 1 и 2 на фиг. 2. Вышеприведeнное уравнение не определяет радиус какой-либо окружности, но лишь разность между ними. Само по себе это уравнение поэтому ничего не даeт для определения местоположения любой из точек r(t1) илиr(t2). На фиг. 2 также отмечена вторая пара концентрических окружностей 3 и 4, представляющая второе из уравнений (8), с центром в В. Опять-таки, их радиусы не определяются этим уравнением, но разность между их радиусами должна быть равна tb-. Точка r(t1) должна лежать на одном из пересечений окружностей 1 и 3, а точка r(t2) должна лежать на одном из пересечений окружностей 2 и 4. Предположим,что значениеравно нулю, т.е. что внутреннее время мобильного телефона сохраняется идеальным всe время между измерениями; затем,если известно местоположение точки r(t1), например, Р на фиг. 2, можно сделать вывод, что точка r(t2) должна быть в Q, потому что теперь в пространстве зафиксированы четыре окружности и, следовательно, измерено местоположение мобильного телефона в более позднее время. На практике нельзя полагать, чторавно нулю, так что необходимо использовать все три уравнения(8), чтобы найти Q при заданном Р. Следует отметить, что имеется также вторая точка пересечения Q' окружностей 2 и 4, а следовательно, неопределeнность в определенииr(t2). Если эта неопределенность не может быть разрешена иными средствами (например, с использованием информации о том, что мобильный телефон используется пешеходом, который не может перемещаться из Р в Q' за время t2-t1), 7 то можно использовать четыре измерения,включающие в себя четыре БППС. Одно из преимуществ настоящего изобретения состоит в том, что если единственный мобильный телефон выполняет измерения трeх сигналов как минимум из трeх географически раздельных БППС в два отличающихся момента времени, то можно определить изменение в местоположении этого мобильного телефона между этими двумя моментами времени (без привязки к известному начальному моменту) при условии, что, по меньшей мере, три из БППС являются общими для двух наборов измерений. Если местоположение мобильного телефона определено ранее в некоторой точке, то этот метод может быть использован в применениях,требующих автономной навигации для мобильного телефона, т.е. навигации без дополнительной привязки к системе CURSOR или иной УРНВ системе. Дальнейшее развитие изобретения, описанное ниже, показывает, как моменты времениt1 и t2 могут быть выбраны близкими произвольным образом, так что измерения вырабатывают оценки скоростей изменения, или производные от измеряемых величин. Выше показано, как можно определить местоположение мобильного телефона в более позднее время из трeх измерений, подобных измерениям в системе CURSOR, для трeх географически распределeнных БППС, выполненным как в более поздний, так и в более ранний моменты времени при условии, (а) что местоположение мобильного телефона известно в более раннее время, и (б) что нет относительного ухода между сигналами, излучeнными БППС в этом интервале (либо такой уход известен). Точность определения местоположения зависит как от точности, с которой известно первое местоположение, так и от расстояния, пройденного между измерениями. Уравнения (8) в действительности содержат пять неизвестных величин: координаты х и у каждой из двух точек Р иCURSOR, для каждой из пяти географически распределeнных БППС как в первом, так и во втором местоположениях достаточно, чтобы однозначно определить и Р, и Q, если мобильный телефон заметно перемещается между моментами этих двух наборов измерений. Таким образом, изобретение обеспечивает способ У-РНВ нахождения местоположения перемещающегося мобильного телефона в несинхронизированной цифровой мобильной телефонной сети без использования каких-либо БИМ. Это может быть особенно полезно для слежения за мобильным телефоном в сети, которая ещe не имеет системы определения местоположения. Дальнейшим преимуществом настоящего изобретения является способность использовать 8 известное местоположение одного мобильного телефона для нахождения неизвестного местоположения второго мобильного телефона. Предположим, что каждый мобильный телефон осуществляет измерение в один и тот же момент времени с помощью трeх географически распределенных БППС А, В, С (см. фиг. 4). Уравнения 5 для первого мобильного телефона H1 тогда примут видta1(t1)=(r1(t1)-a)/+a(t1)+1(t1),tb1(t1)=(r1(t1)-b)/+b(t1)+1(t1),tc1(t1)=(r1(t1)-c)/+c(t1)+1(t1), (9) где r1(t1) - это (известное) местоположение H1 и измерения выполняются в момент времени t1. Те же самые уравнения для второго мобильного телефона H2 будут иметь видta=(r1(t1)-a-r2(t2)-a)/+,tb=(r1(t1)-b-r2(t2)-b)/+,tc=(r1(t1)-c-r2(t2)-c)/+, (11) которые идентичны по форме уравнениям(8). Следовательно, при заданном r1(t1) - местоположении H1 в момент времени t1, мы можем вычислить r2(t2), которое является местоположением Н 2 в момент времени t2. (Опять-таки,измерения для четырeх БППС необходимы для разрешения неопределeнности в r2(t2), если ее нельзя разрешить иными средствами.) В этом случае t2 может быть равно t1. Та же самая идея может быть распространена на множество мобильных телефонов. В уравнениях (11) вектор r1(t1) относится к первому мобильному телефону H1, местоположение которого известно, а вектор r2(t2) относится к любому второму мобильному телефону Н 2-Нn,представляющему любой из множества таких телефонов. Можно поэтому использовать, в качестве временной меры, первый мобильный телефон H1 с известным местоположением как"БИМ", предоставляя возможность очень быстрого установления услуги У-РНВ в новой области. Данный способ можно использовать даже в области, где уже используются БИМ. При использовании обычного способа У-РНВ для нахождения местоположения мобильного телефона Нn этот мобильный телефон может затем отслеживаться без дальнейшего обращения к БИМ. Вычисление местоположения мобильного телефона можно выполнить в сервисном узле(например, в центре определения местоположения мобильных устройств (ЦММ, в другом 9 местоположении или в самом мобильном телефоне в зависимости от применения. Другим интересным приложением является система из множества мобильных телефоновH1-Hn в области, где неизвестно местоположение ни одного из них. При условии, что любая достаточно разнесeнная пара может осуществлять измерения для одних и тех же пяти БППС А-Е (см., к примеру, фиг. 5), их местоположения можно определить с помощью пяти уравнений,подобных трeм уравнениям (8). Иначе говоря,при условии, что разнесeнные пары могут осуществлять измерения, по меньшей мере, для трех или четырех общих БППС, вычисления на основе многих таких измерений парами за короткий период могут быть достаточны для определения местоположений их всех. Рассмотрим, например, набор из трeх мобильных телефонов H1, H2 и Н 3 (см. фиг. 5). Относительные местоположения H1 и H2, H2 и Н 3,Н 3 и H1 могут быть рассчитаны с помощью трех или четырех измерений для БППС, поскольку ограничения, наложенные уравнениями на местоположения вершин треугольника H1H2H3,могут сделать решение единственным. В любом случае существуют общеизвестные статистические методы, такие как основанные на Байесовской теореме или методе максимального правдоподобия, которые можно использовать для решения этих уравнений. В вышеизложенном описании было сделано предположение, что стабильность сети БППС достаточна для обеспечения возможности прогнозирования относительных уходов между измерениями. Можно применить изобретение к сети, в которой сигналы БППС распространяются свободно по отношению друг к другу, т.е. к сети, в которой нет синхронизации какого-либо вида между передачами. В этом случае требуются, по меньшей мере, два мобильных телефона, которые могут принимать сигналы от одних и тех же пяти геометрически распределeнных БППС практически в одни и те же моменты времени, что и все остальные. Тогда уравненияte=(r1(t1)-e-r2(t1)-e)/+,где a, b, с, d и e являются векторными местоположениями пяти БППС, r1(t1) - это векторное местоположение первого мобильного телефонаH1, a r2(t1) - это местоположение второго мобильного телефона Нn, причeм оба набора измерений сделаны в один и тот же момент времениt1. Об этом моменте времени может быть просигнализировано, к примеру, конкретным элементом передач, таким как конкретный номер кадра, или специальным сигналом. В уравнениях (12) сдвиги времени передачи в сигналах от 10 БППС (величины a, b, c и т.д.) исключены и не появляются при условии, что измерения выполняются двумя мобильными телефонами достаточно близко во времени, так что уходы достаточно малы, чтобы их можно было игнорировать. Пяти измерений в уравнениях (12) достаточно для определения местоположения двух мобильных телефонов. Отметим, что в этом случае не требуется никаких БИМ или их эквивалентов. В другой совместно поданной патентной заявке РСТ (ссылочный номер MJB06733WO),содержание которой включено сюда посредством ссылки, описано, как можно собрать измерения от сети БИМ в один перечень, "виртуальный" БИМ (ВБИМ), как если бы все БППС могли быть измерены единственным БИМ. Это изобретение может быть расширено на установку одного или более ВБИМ в сети GSM или иной сети передач, которая вообще не имеет реальных БИМ. Измерения временных характеристик мобильными телефонами, как описано выше, особенно в отношении уравнений (5)(12), могут осуществляться для получения карты сдвигов времени приeма сигналов от БППС,которая может храниться в ВБИМ и использоваться в последующих стандартных вычислениях по методу CURSOR или вычислениях местоположения по иному методу У-РНВ. Можно также представить себе систему, в которой покрытие с использованием малого числа реальных БИМ усиливается в одном или более ВБИМ измерениями мобильных телефонов для получения того же самого уровня обслуживания, как и от полной сети реальных БИМ. Ниже описана работа реальной системы,включающей в себя данное изобретение, с помощью смоделированных измерений. На фиг. 6 показана гипотетическая сеть из пяти БППС В заполненными кружками. Также показаны местоположения двух мобильных телефонов Н пустыми квадратами, разнесeнных на расстояние около 2,2 км. Компьютерная программа (которая на практике может выполняться в микропроцессоре одного или обоих мобильных телефонов) использовалась для генерирования перечня измерений сдвигов тактирования, которые производились бы каждым из мобильных телефонов Н, включая добавление случайного шумового элемента, эквивалентного среднеквадратичному значению в 50 м для более точного моделирования реальных условий. Каждой БППС В назначался произвольный и отличный от других сдвигтактирования сигнала, выбранный случайным образом по отношению к универсальному "абсолютному" времени. Каждому мобильному телефону Н также назначалось значение для ошибкисинхронизации внутреннего времени. Расстояния от каждого мобильного телефона для каждой БППС использовались затем для составления перечня 11 временных сдвигов сигналов, принятых каждым мобильным телефоном, по отношению к внутреннему времени. Два перечня сдвигов тактирования обрабатывались затем в компьютере, запрограммированном на решение пяти вышеприведeнных уравнений (12). Результаты показаны на чертеже крестиками Ч. Ошибки в восточном и северном направлениях для мобильного телефона ближе к левому нижнему углу соответствовали -95 и -59 м, а для мобильного телефона возле правого верхнего угла ошибки -100 и +30 м. Эллипсы F, окружающие помеченные местоположения, представляют области доверия, в которых правильное местоположение предсказывалось с уровнем в 67%. Главные полуоси имели длину 160 и 240 м. Интересно отметить, что в общем случае имеется существенная корреляция между ошибками в местоположениях, получаемых данным способом, с результатом, когда расстояние от одного мобильного телефона до другого известно более точно. В вышеприведeнном примере ошибка в измеренном расстоянии, в действительности равном 2,2 км, была меньше чем 90 м. Ниже описан второй пример системы согласно изобретению, в котором используются разные скорости изменения - или производные измеряемых величин. В первом из уравнений (7) рассматривался случай единственного мобильного телефона,выполнявшего измерения сигналов от БППС А с наблюдаемым временным сдвигом ta1(t1) при нахождении в местоположении r(t1) в момент времени t1 и с наблюдаемым временным сдвигом ta1(t2) при нахождении в местоположенииr(t2) в момент времени t2. Это уравнение имеет видta1(t1)-ta1(t2)=(r(t1)-a-r(t2)-a)/+(a(t1)-a(t2+(1(t1)-1(t2. В дальнейшем использованы следующие замены:ta1(t) - на Ta(t) Т(t+t) - на Ta(t) 1 - на . Тогда это уравнение примет вид Та(t)=(r(t+t)-a-r(t)-a)/+a(t+t)-a(t)+(t+t)-(t) (13) Вновь делается предположение о том, что стабильность передач БППС в сети такова, что значенияне меняются существенно за периодt измерений (который можно сделать произвольно коротким). Таким образом, a(t+t)=a(t) и уравнение (13) можно упростить. Полный набор для пяти БППС будет иметь вид Та(t)=(r(t+t)-a-r(t)-a)/+(t+t)-(t) Тb(t)=(r(t+t)-b-r(t)-b)/+(t+t)-(t) Тc(t)=(r(t+t)-c-r(t)-c)/+(t+t)-(t) Тd(t)=(r(t+t)-d-r(t)-d)/+(t+t)-(t) Тe(t)=(r(t+t)-e-r(t)-e)/+(t+t)-(t). (14) Эти уравнения можно решить точно так же, как и уравнения (12), чтобы получить какr(t+t), так и r(t) без обращения к сети БИМ. Если устремить t к нулю, то скорости изменений - или производные - величин находятся следующим образом: где v - это скорость мобильного телефона(v=dr/dt),- это угол между вектором скорости и вектором от БППС к мобильному телефону(см. фиг. 3), a d/dt - это скорость изменения внутреннего времени мобильного телефона, т.е. сдвиг по частоте кварцевого генератора мобильного телефона относительно его номинального значения. Эти уравнения математически представляют собой то же самое, что и уравнения (14), и могут быть решены для получения как местоположения r, так и скорости v мобильного телефона без обращения к сети БИМ. Предполагается также, что мобильный телефон перемещается с постоянной скоростью,тогда производные далее можно оценить следующим образом: где принято предположение о том, что величинаd2/dt пренебрежимо мала. Во многих обстоятельствах могут быть доступны измерения только некоторых из этих параметров. Тем не менее, они могут включаться вместе с другими вычислениями по методу У-РНВ для улучшения оценок местоположения мобильного телефона. Однако, если выполняются измерения всех этих параметров, то и расстояние между БППС и данным мобильным телефоном, и скорость мобильного телефона можно определить как функции от d/dt следующим образом: Если выполняются измерения для трeх или более географически разнесeнных БППС, то решение можно получить непосредственно дляr, d/dt и v без обращения к сети БИМ. Существуют, однако, обстоятельства, когда эти уравнения нельзя оценить. Это случается, когда d3Ta/dT3 равно нулю. Даже в этих слу 13 чаях информацию о r и v всe же можно получить, т.к. имеется лишь четыре причины для этого нулевого значения (в отсутствие шума) 1. Если мобильный телефон неподвижен,т.е. v=0, то и d2Ta/dT2, и d3Ta/dt3 равны нулю, так что dTa/dt=d/dt. 2. Если а=90, то d3Ta/dt3 будет равно нулю, а, следовательно 3. Если мобильный телефон перемещается непосредственно к БППС, т.е. а=0, то иd2Ta/dT2, и d3Ta/dt3 равны нулю, тогда 4 . Если мобильный телефон перемещается непосредственно от БППС, т.е. а=180, то иd2Ta/dT2, и d3Ta/dt3 равны нулю, тогда Если мобильный телефон проходит непосредственно под БППС при выполнении измерений, т.е. r=а, то величина dTa/dt будет бесконечна. Если такая бесконечность наблюдается в мобильном телефоне, то его местоположение становится известно сразу посредством измерения только для одной БППС. Если мобильные телефоны используются в цифровой телефонной сети, такой как системаGSM, тактирование мобильного телефона выполняется заранее по сигналам, принятым от"обслуживающей БППС" (т.е. БППС, с которой этот мобильный телефон осуществляет связь для целей телефонной связи), чтобы синхронизировать сигналы мобильного телефона, принимаемые обслуживающей БППС, с еe собственными сигналами. Это часто определяют как предварительную синхронизацию. На практике это означает, что мобильный телефон синхронизирует своe собственное внутреннее время с сигналами, принятыми от обслуживающей БППС, например БППС А. Эта синхронизация приводит уравнения (16) к следующему виду: Измерения некоторых или всех из этих величин могут также объединяться с измерениями из других методов У-РНВ, чтобы получить дополнительные ограничения, а значит, более высокую точность предсказанных местоположения и скорости. Например, если все из вышеуказанных параметров измеряются как для БППС В,так и для БППС С, то, как и прежде, уравнения можно решить без обращения в сети БИМ, чтобы получить местоположение и скорость мобильного телефона. 14 В предшествующем примере системы по изобретению измерения сдвигов тактирования использовались, к примеру, для оценки скорости изменения сдвигов тактирования. Это эквивалентно измерению сдвига по частоте сигналов от этой БППС и этого можно достичь непосредственно измерением и анализом модулирующих сигналов из приeмника. Например, оцифрованные отсчeты данных I и Q, соответствующие пакетам синхронизации в системе GSM (форма которых известна заранее), могут быть преобразованы в частотную область с помощью общеизвестного метода, такого как быстрое преобразование Фурье, и частота идентифицированных признаков сравнивается с ожидаемыми значениями для получения сдвигов по частоте в сигналах. Этот метод смоделирован в компьютерной программе для проверки воздействия отношения сигнал/шум на точность, с которой этим способом можно измерить скорость мобильного телефона. Эта точность зависит от числа отсчeтов N в шаблоне, использованном для согласования частотного спектра. Результаты получились следующими: Отношение сигнал/шум N=64 N=128 N=256 10 38,4 12,8 4,8 30 12,8 4,3 1,6 100 3,8 1,3 0,5 Эта таблица даeт ошибки в километрах в час, связанные с соответствующими значениями отношения сигнал/шум и длиной шаблона. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения местоположения приeмников, местоположения которых ещe не известны, в сети источников передач, местоположения некоторых или всех из которых известны, включающий в себя следующие шаги:(а) в первый момент времени измерение первого набора сдвигов по времени или фазе между сигналами, принятыми первым приемником, местоположение которого ещe не известно,от множества источников передач, и сигналом,принятым первым приемником от другого из упомянутых источников передач или опорного источника;(б) в выбранный второй момент времени измерение второго набора сдвигов по времени или фазе между сигналами, принятыми вторым приемником, местоположение которого ещe не известно, от множества источников передач, и сигналом, принятым вторым приемником от другого из упомянутых источников передач или опорного источника; и(в) вычисление местоположений первого и второго приемников из соотношения между указанными первым и вторым наборами сдвигов. 15 2. Способ по п.1, отличающийся тем, что первое и второе времена одинаковы. 3. Способ по п.1 или 2, отличающийся тем,что в выбранные дополнительные моменты времени измеряются соответствующие относительные сдвиги по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым приемником, или вторым приемником, или иным приемником или приемниками, местоположение или местоположения которых еще не известны, от множества источников передач; и с помощью этих измерений и известных местоположений источников передач определяется местоположение любого или всех приемников. 4. Способ по п.3, отличающийся тем, что любой из выбранных моментов времени является тем же, что и любой другой из выбранных моментов времени. 5. Способ по любому из пп.1-4, отличающийся тем, что упомянутые приемники являются мобильными телефонами системы GSM, причем все или каждый мобильный телефон имеет свое тактирование, заранее синхронизированное с обслуживающей базовой приемопередающей станцией (БППС). 6. Способ по п.5, отличающийся тем, что дополнительно включает в себя(г) измерение в первый момент времени относительных сдвигов по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым мобильным телефоном от необслуживающей БППС;(д) измерение в выбранный второй более поздний момент времени относительных сдвигов по времени или фазе соответственно по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых вторым мобильным телефоном от необслуживающей БППС;(е) вычисление местоположения любого мобильного телефона, или изменения в местоположении первого мобильного телефона между первым и вторым моментами времени, или состояния перемещения любого мобильного телефона в первый или второй моменты времени из соотношения между первым и вторым наборами данных. 7. Система для определения местоположений приемников, местоположения которых еще не известны, в сети источников передач, местоположения некоторых или всех из которых известны, содержащая(а) средство для измерения в первый момент времени относительных сдвигов по времени или фазе между сигналами, принятыми первым приемником, местоположение которого еще не известно, от множества источников передач, и сигналом, принятым первым приемником от другого из источников передач или опорного источника;(б) средство для измерения в выбранный второй момент времени второго набора сдвигов по времени или фазе между сигналами, принятыми вторым приемником, местоположение которого еще не известно, от множества источников передач, и сигналом, принятым вторым приемником от другого из источников передач или опорного источника; и(в) средство для вычисления местоположений первого и второго приемника из соотношения между указанными первым и вторым наборами сдвигов. 8. Система по п.7, отличающаяся тем, что дополнительно содержит(г) средство для измерения в выбранные дополнительные моменты времени соответствующих сдвигов по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов,принятых первым приемником, или вторым приемником, или иным приемником или приемниками, местоположение или местоположения которых еще не известны, от множества источников передач; и д) средство для вычисления местоположения любого или всех приемников с помощью этих измерений и известных местоположений источников передач. 9. Система по п.7 или 8, отличающаяся тем, что упомянутое средство для измерения и упомянутое средство для вычисления включают в себя микропроцессор в одном или более из упомянутых приемников. 10. Система по любому из пп.7-9, отличающаяся тем, что содержит компонент или компоненты системы GSM. 11. Система по п.10, отличающаяся тем,что включает в себя один или более мобильных телефонов, причем все или каждый мобильный телефон имеет свое тактирование, заранее синхронизированное с обслуживающей БППС. 12. Система по п.11, отличающаяся тем,что дополнительно содержит(е) средство для измерения в первый момент времени относительных сдвигов по времени или фазе по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов, принятых первым мобильным телефоном от необслуживающей БППС;(ж) средство для измерения в выбранный второй момент времени относительных сдвигов по времени или фазе соответственно по отношению к сигналу, принятому от другого передатчика или опорного источника, для сигналов,принятых вторым мобильным телефоном от необслуживающей БППС; з) средство для вычисления местоположений первого и второго мобильных телефонов из соотношения между первым и вторым наборами сдвигов.
МПК / Метки
Метки: системах, усовершенствования, радиопозиционирования
Код ссылки
<a href="https://eas.patents.su/10-3597-usovershenstvovaniya-v-sistemah-radiopozicionirovaniya.html" rel="bookmark" title="База патентов Евразийского Союза">Усовершенствования в системах радиопозиционирования</a>
Усовершенствования в системах радиопозиционирования
Номер патента: 3115
Опубликовано: 27.02.2003
Авторы: Даффетт-Смит Питер Джеймс, Брайс Джеймс Пол, Хансен Пол
Метки: системах, радиопозиционирования, усовершенствования
Формула / Реферат:
1. Способ формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передачи, соответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги: (а) получение данных от двух или более приёмников, местоположение которых может быть известно или определено, причём данные от...
Усовершенствования, касающиеся линз с переменным фокусным расстоянием
Номер патента: 2927
Опубликовано: 31.10.2002
Автор: Силвер Джошуа Дейвид
Метки: фокусным, касающиеся, расстоянием, усовершенствования, линз, переменным
Формула / Реферат:
1. Способ изготовления линзы с переменным фокусным расстоянием, при котором зажимают первую прозрачную гибкую мембрану между центральным и одним из периферийных колец, вторую прозрачную гибкую мембрану зажимают между центральным и вторым периферийным кольцами, в результате чего между первой и второй гибкими мембранами образуется полость, при этом положение первого периферийного и центрального колец фиксируют с помощью второго периферийного...
Способ формирования изображения в системах с перемещающимися относительно друг друга объектами
Номер патента: 2467
Опубликовано: 25.04.2002
Автор: Курганов Игорь Петрович
МПК: G09F 9/30, G03B 21/00
Метки: системах, друг, объектами, изображения, способ, формирования, друга, перемещающимися, относительно
Формула / Реферат:
1. Способ формирования изображения в системах с перемещающимися относительно друг друга объектами, заключающийся в том, что - разбивают каждый кадр формируемого изображения на фрагменты, состоящие каждый из одного или более элементов изображения и расположенные вдоль направления относительного перемещения объекта, принимающего визуальную информацию; - каждый кадр изображения формируют с помощью развёртки отдельной матрицей излучателей, каждая из...
Способ и устройство для точной синхронизации частоты в системах демодуляции множества несущих
Номер патента: 2748
Опубликовано: 29.08.2002
Авторы: Эберляйн Эрнст, Буххольц Штефан, Бадри Сабах, Липп Штефан, Герхойзер Хайнц, Хойбергер Альберт
МПК: H04L 27/26
Метки: демодуляции, множества, точной, устройство, системах, несущих, частоты, синхронизации, способ
Формула / Реферат:
1. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающий дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы а)...
Усовершенствования в устройствах для дозирования лекарств
Номер патента: 2639
Опубликовано: 29.08.2002
Автор: Уорби Ричард Джон
МПК: B65D 83/14, A61M 15/00, B05D 7/24...
Метки: усовершенствования, лекарств, устройствах, дозирования
Формула / Реферат:
1. Находящийся под давлением баллончик-дозатор для дозирования медикамента, в котором, по меньшей мере, часть одной или более внутренних поверхностей деталей, которые вступают в контакт с медикаментом во время хранения или дозирования, имеет слой из одного или более полимеризовавшихся в холодной плазме мономеров, сцепленный, по меньшей мере, с частью поверхностей, причем слой состоит из полимеризовавшегося в холодной плазме фторированного...
Предыдущий патент: Предохранительная пробка
Следующий патент: Защищенная система, использующая в качестве ключа непрерывно изменяющиеся признаки части тела пользователя
Случайный патент: Способ диагностики вертеброгенных заболеваний опорно-двигательного аппарата