Усовершенствования в системах радиопозиционирования
Номер патента: 3115
Опубликовано: 27.02.2003
Авторы: Даффетт-Смит Питер Джеймс, Брайс Джеймс Пол, Хансен Пол
Формула / Реферат
1. Способ формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передачи, соответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги:
(а) получение данных от двух или более приёмников, местоположение которых может быть известно или определено, причём данные от приёмника содержат сдвиги по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику в каждом приёмнике или друг к другу; и
(б) объединение полученных данных и вычисление перечня сдвигов, соответствующих заданному местоположению, по отношению к общему эталону.
2. Способ формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги:
(а) получение данных от двух или более приёмников, местоположения которых могут быть известны или определены, причём данные от приёмника представляют эти принятые сигналы;
(б) определение из полученных данных сдвигов по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику или друг к другу; и
(в) объединение определённых таким образом сдвигов и вычисление перечня сдвигов, соответствующих заданному местоположению, относительно общего эталона.
3. Способ радиопозиционирования для определения местоположения одного или более приёмников, местоположение которых неизвестно, включающий в себя способ по п.1 или 2.
4. Способ радиопозиционирования по п.3, в котором общий эталон содержит внешний эталон.
5. Способ радиопозиционирования по п.4, в котором общий эталон содержит сигнал глобальной системы определения местоположения (GPS).
6. Способ радиопозиционирования по любому из пп.3-5, в котором шаг получения данных от одного или более приёмников включает в себя обеспечение получения упомянутых данных из общего местоположения.
7. Способ радиопозиционирования по любому из пп.3-5, в котором шаг получения данных от двух или более приёмников включает в себя обеспечение получения упомянутых данных от каждого упомянутого приёмника в моменты времени, определённые каждым упомянутым приёмником.
8. Устройство для формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, содержащее
(а) средство для получения данных от двух или более приёмников, местоположения которых могут быть известны или определены, причём данные от приёмника содержат сдвиги по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику в каждом приёмнике или друг к другу; и
(б) средство для объединения полученных данных и вычисления перечня сдвигов, соответствующих заданному местоположению, по отношению к общему эталону.
9. Устройство для формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, содержащее
(а) средство для получения данных от двух или более приёмников, местоположения которых могут быть известны или определены, причём данные от приёмника представляют эти принятые сигналы;
(б) средство для определения из полученных данных сдвигов по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику или друг к другу; и
(в) средство для объединения определённых таким образом сдвигов и вычисления перечня сдвигов, соответствующих заданному местоположению, относительно общего эталона.
10. Система радиопозиционирования, включающая в себя устройство по п.8 или 9.
11. Система радиопозиционирования по п.10, в которой общий эталон содержит эталон, внешний для упомянутых приёмников.
12. Система радиопозиционирования по п.11, в которой общий эталон содержит сигнал GPS.
13. Система радиопозиционирования по любому из пп.10-12, в которой средство для получения данных от двух или более приёмников включает в себя компьютерную систему, выполненную с возможностью переноса упомянутых данных от упомянутых двух или более приёмников в упомянутую компьютерную систему в моменты времени, определённые упомянутой компьютерной системой.
14. Система радиопозиционирования по любому из пп.10-13, в которой средство для получения данных от двух или более приёмников включает в себя компьютерную систему, причем система радиопозиционирования включает в себя средство для обеспечения получения данных от каждого упомянутого приёмника в моменты времени, определённые каждым упомянутым приёмником.
15. Цифровая телефонная сеть, включающая в себя систему радиопозиционирования по любому из пп.10-14.

Текст
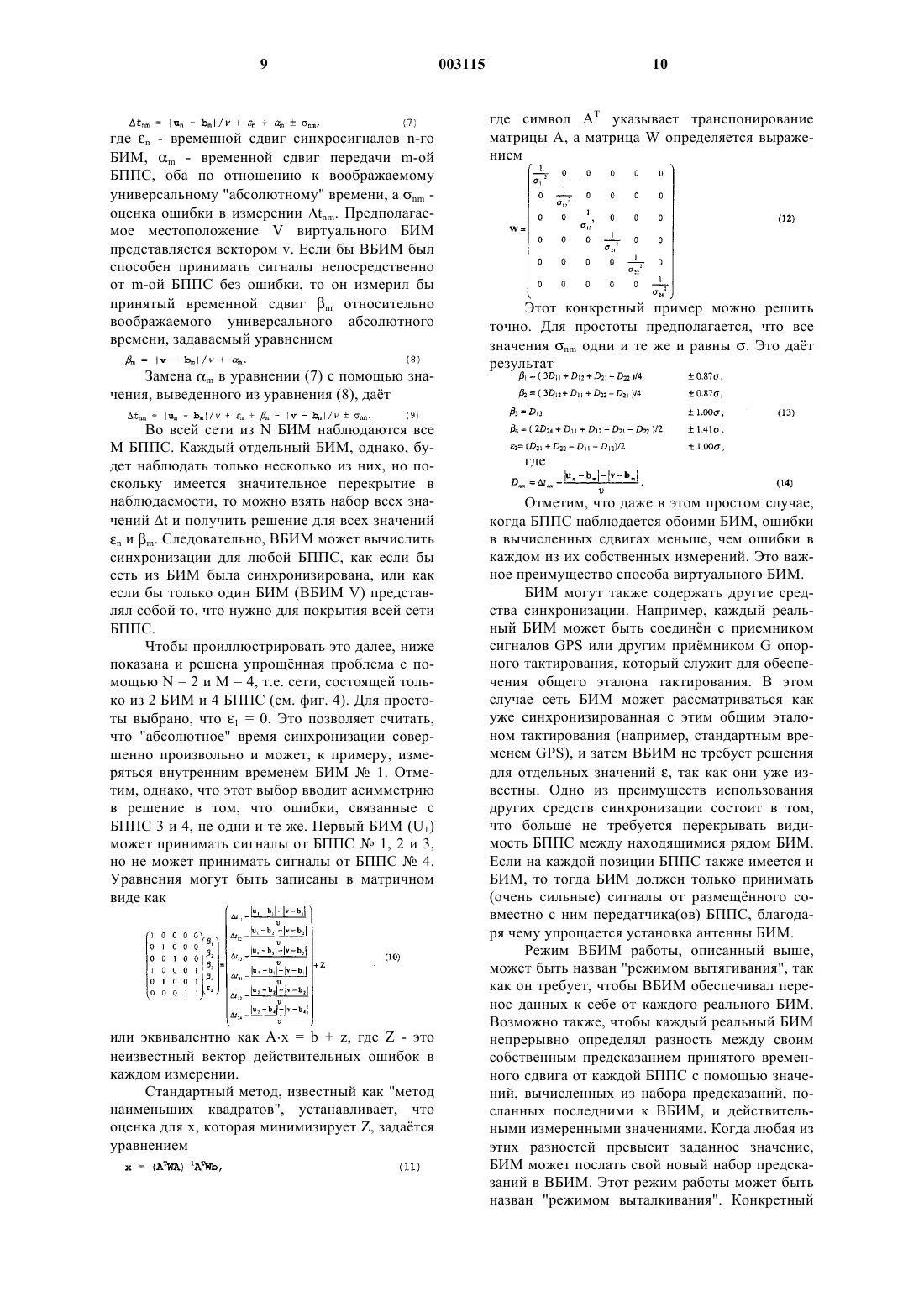
1 Настоящее изобретение относится к усовершенствованиям в системах радиопозиционирования и их способам работы и, в частности, к способам и устройствам для упрощения получения данных, требуемых в таких системах. Заявка ЕПВ 0303371, содержание которой включено сюда посредством ссылки, описывает систему радионавигации и сопровождения, которая использует независимые радиопередатчики, установленные для иных целей. Сигналы от каждого передатчика, взятые по отдельности, принимаются двумя принимающими станциями, одна из которых имеет стационарное известное местоположение, а другая установлена на подвижном объекте, местоположение которого подлежит определению. Представление сигналов, принятых в одной принимающей станции, посылается по линии на процессор в другой принимающей станции, где принятые сигналы сравниваются для нахождения их разностей фаз или временных задержек. Три таких измерения, сделанные для трх широко разнеснных независимых передатчиков,достаточны для определения местоположения подвижного примника по двум координатам,т.е. его местоположения на земле. Определяется также фазовый или временной сдвиг между задающими колебаниями в двух примниках. Система "CURSOR", описанная в заявке ЕПВ 0303371, представляет собой систему радиопозиционирования, которая может использовать сигналы, излучнные существующими несинхронизированными радиопередатчиками, для определения местоположения портативного примника. В отличие от некоторых других систем, которые используют свойство временной когерентности сетей, состоящих из предназначенных для этих целей синхронизируемых передатчиков, CURSOR использует пространственную когерентность сигналов, передаваемых одиночными передатчиками. В дальнейшей разработке (см. заявки ЕПВ и РСТ 0880712 и WO 99/21028) применн метод нахождения местоположения мобильного телефона в системе GSM и другой цифровой телефонной системе, и приведены примеры способа"Усиленной разности наблюдаемых времен" (УРНВ) с помощью сигналов нисходящей линии связи, передаваемых сетью базовых примопередающих станций (БППС) телефонной системы. В цифровой мобильной телефонной системе, описанной в заявке ЕПВ 0880712, содержание которой включено сюда посредством ссылки, сигналы от каждой БППС в диапазоне дальности действия мобильного телефона принимаются как самим мобильным телефоном, так и фиксированным по соседству примником,блоком измерения местоположения (БИМ), местоположение которого известно точно. Представления принятых сигналов пропускаются к центру определения местоположения мобиль 003115 2 ных устройств (ЦММ), где они сравниваются по порядку для определения временной разности между ними. Фиг. 1 показывает геометрию стандартной двухкоординатной системы. Начало декартовых координат х и у совпадает с БИМ, расположенным в О. Ориентация осей несущественна, но может быть, как правило,установлена так, чтобы ось у лежала вдоль направления север-юг местной картографической сетки. Мобильный телефон R имеет местоположение, определяемое вектором r по отношению к местоположению О БИМ. БППС А имеет местоположение, определяемое вектором а. Рассмотрим сначала сигналы от БППС А. Временная разность tа, измеренная между сигналами, принятыми в R и О, задатся выражением где- скорость радиоволн,- временной сдвиг синхросигналов между синхросигналами в примниках R и О, а вертикальные штрихи с каждой стороны векторных величин означают абсолютную величину векторов, используемых в уравнении. Величинапредставляет ошибку синхронизации между измерениями, выполненными двумя примниками. Аналогично можно записать для двух других БППС (В и С) в векторных местоположениях b и с (не показаны) Значения ta, tb, tc измеряются способами, раскрытыми в заявке ЕПВ 0880712, а значения а, b, с иизвестны. Следовательно,уравнения (1) могут быть решены для нахождения местоположения r мобильного телефона вместе со значением . В заявке РСТWO 99/21028, содержание которой включено сюда посредством ссылки,описывается, как можно измерить эти самые временные сдвиги с помощью локально созданных шаблонов в телефонной системе GSM следующим образом. Предположим, что мобильный телефон R зарегистрировал короткий пакет сигналов системы GSM от БППС А. В этой записи содержится кадровая структура, пакеты синхронизации и иные "заданные" данные (или заранее заданные значения), которые являются постоянными признаками этих передач. Процессор в телефонной трубке может создавать шаблоны для согласования на основе известной структуры сетевых сигналов. Принятые сигналы могут затем согласовываться с локально созданным шаблоном. Когда шаблон обнаруживает совпадение, корреляционный пик в положении наилучшего согласования соответствует временному сдвигу между принятыми сигналами и местными синхросигналами в мобильном телефоне. Для сигналов, излучнных из БППС А,этот измеренный временной сдвиг ta1 задатся выражением где a -временной сдвиг передач БППС A,a 1 - временной сдвиг внутреннего времени мобильного телефона, оба сдвига относительно воображаемого универсального "абсолютного" времени. Сигналы от БППС В и С могут быть измерены таким же образом, в результате чего получим достаточно единственного измерения сигналов БППС каждым БИМ, чтобы определить временной сдвиг синхросигналов между БИМ. Например, предположим, что расстояние от U1 до БППС равно s1, a расстояние от U2 до БППС равно s2. U1 измеряет временной сдвиг t1, a U2 измеряет временной сдвиг t2, задаваемые Такие же измерения можно выполнить в БИМ, в результате чего получим где- временной сдвиг передач БППС, a 21 и 22 - временные сдвиги внутреннего времени БИМ в U1 и U2 соответственно. Вычитание второго уравнения из первого дат где 2 -временной сдвиг внутреннего времени БИМ относительно одного и того же воображаемого универсального абсолютного времени. Вычитание уравнений (3) из уравнений (2) дат(1) и могут быть решены таким же образом,чтобы найти местоположение r мобильного телефона и значение . Ясно, что описанный выше способ CURSOR вместе со всеми другими способами, которые используют сигналы от несинхронизированных передатчиков, требует, чтобы в области покрытия телефонной системы была установлена сеть БИМ. Эти блоки действуют как опорные точки, в которых несинхронизированные сигналы, излучнные из БППС, измеряются для сравнения с такими же сигналами, принятыми мобильным телефоном. Каждое измерение местоположения требует, чтобы было выполнено согласование между сигналами, принятыми мобильным телефоном от нескольких из близлежащих БППС, и сигналами, принятыми в БИМ от того же самого набора БППС. На практике часто бывает трудно найти согласование с помощью только лишь одного БИМ, особенно если сеть БИМ редкая, поскольку мобильный телефон может принимать сигналы от БППС, не принятые в БИМ, и наоборот. Поэтому необходимо объединить измерения от двух или более БИМ. Однако каждый новый БИМ, введнный в вычисления, добавляет дополнительный неизвестный временной сдвиг синхросигналов (1, 2 и т.д.), каждый из которых поэтому требует дополнительного измерения для БППС, чтобы обеспечить лишнее уравнение, необходимое для решения уравнений относительно всех неизвестных значений. Одно решение этой проблемы представлено в заявке РСТWO 99/21028, где показано,как можно синхронизировать сеть БИМ. Предположим, что на фиг. 2 соседняя пара БИМ U1 иU2 может наблюдать общую БППС. Местоположения БИМ и БППС все известны, так что что представляет собой относительный временной сдвиг синхросигнала в U1 по отношению к синхросигналу в U2. Этот процесс может повторяться для второй пары БИМ, например, U2 иU3, и другой БППС, сигналы которой могут приниматься обоими членами этой второй пары БИМ. Таким путм можно вычислить карту синхронизации, которая задат сдвиги синхросигналов внутреннего времени всех БИМ относительно одного из них, выбранного в качестве ведущего "времени сети БИМов". После установления таким образом карты синхронизации БИМ измерение местоположения способомCURSOR может затем включать любое число БИМ без ущерба от добавления лишнего неизвестного временного сдвига для каждого БИМ,поскольку известны относительные временные сдвиги БИМ. Примники, рассмотренные выше, измеряют временные сдвиги. В более общем случае,примники могут измерять временные сдвиги(которые можно преобразовать во временные сдвиги с неопределнностью по модулю 360),частотные сдвиги или скорости изменения частотных сдвигов. Хотя эти измерения относятся к разным величинам, настоящее изобретение применимо с пользой к каждому из них, так как при объединении с аналогичными измерениями,производимыми вторым примником, они могут независимо предоставлять информацию о местоположении. Системы определения местоположения, использующие эти измерения, рассматриваются в родственной заявке на патент(ссылочный номер MJB06427WO), поданной одновременно с данной заявкой. Настоящее изобретение показывает, как те же самые преимущества эффективно синхронизированной сети БИМ можно получить установкой одного или более "виртуальных БИМ" в сети, которые действуют как интерфейсные узлы для реальных БИМ. Согласно первому аспекту этого изобретения, предложен способ формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передачи, со 5 ответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги:(а) получение данных от двух или более примников, местоположение которых может быть известно или определено, причм данные от примника содержат сдвиги по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач,по отношению к опорному источнику в каждом примнике или друг к другу; и(б) объединение полученных данных и вычисление перечня сдвигов, соответствующих заданному местоположению по отношению к общему эталону. На практике эти сдвиги из перечня могут использоваться вместо сдвигов, полученных непосредственно от примника или примников. Относительные сдвиги по времени, фазе,частоте или их производным по отношению друг к другу или по отношению к опорному источнику, для сигналов, принятых первым примником от множества источников передач,могут быть представлены соответствующими сдвигами или разностями в расстояниях между источниками передач и первым или вторым примниками. Изобретение также включает в себя устройство, использующее вышеописанный способ, содержащее(а) средство для получения данных от двух или более примников, местоположения которых могут быть известны или определены, причм данные от примника содержат сдвиги по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику в каждом примнике или друг к другу; и(б) средство для объединения полученных данных и вычисления перечня сдвигов, соответствующих заданному местоположению по отношению к общему эталону. В способе, использующем методы, подобные тем, или такие же, как описанные в заявке ЕПВ 0880712, вместо сдвигов по времени,фазе, частоте или их производным, либо их эквивалентов, выраженных сдвигами по расстоянию или их производным, могут использоваться данные, представляющие принятые сигналы, из которых можно определить сдвиги сигналов,принятых от источников передач по отношению к опорному источнику. Поэтому изобретение также включает в себя способ формирования перечня сдвигов по времени, фазе или частоте или их производным,либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги:(а) получение данных от двух или более примников, местоположения которых могут быть известны или определены, причм данные от примника представляют эти принятые сигналы;(б) определение из полученных данных сдвигов по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику или друг к другу; и(в) объединение определнных таким образом сдвигов и вычисление перечня сдвигов,соответствующих заданному местоположению,относительно общего эталона. Изобретение также включает в себя устройство для выполнения вышеописанного способа, содержащее(а) средство для получения данных от двух или более примников, местоположения которых могут быть известны или определены, причм данные от примника представляют эти принятые сигналы;(б) средство для определения из полученных данных сдвигов по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику или друг к другу; и(в) средство для объединения определнных таким образом сдвигов и вычисления перечня сдвигов, соответствующих заданному местоположению, относительно общего эталона. Настоящее изобретение также включает способ и систему радиопозиционирования,включающие в себя способы и устройства, определнные выше. Изобретение также включает в себя устройство ("виртуальный БИМ") для выполнения любого или обоих из этих способов. Это устройство может содержать компьютер (расположенный, где это удобно), запрограммированный для выполнения требуемой обработки. Хотя нижеследующее описание конкретного применения этого изобретения касается сигналов в цифровой телефонной сети, понятно, что изобретение никоим образом не ограничено этим применением, но может применяться к любой сети из одного или более передатчиков, синхронизированных или несинхронизированных, установленных для любой цели. Виртуальный БИМ включает в себя компьютерную обработку, которая может выполняться на любой компьютерной платформе,способной получать данные от реальных БИМ. Соответственно, дальнейший аспект этого изобретения включает в себя способ вычисления и поддержания перечня сдвигов по времени, фазе,частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производным, для множества сигналов источников передач, соответствующих задан 7 ному местоположению по отношению к общему эталону. Предполагается, что сеть БППС не синхронизирована в том, что временные сдвиги сигналов БППС не несут никакого постоянного или известного соотношения друг с другом, но тем не менее генераторы БППС стабильны, так что их мгновенные частоты изменяются лишь медленно во времени. При этих условиях возможно предсказать текущий принятый сдвиг по времени, фазе, частоте или их производным для сигналов от заданной БППС посредством заданного реального БИМ из достаточно недавних данных предыстории. Реальные БИМ в сети осуществляют циклические измерения всех БППС, которые они могут обнаружить, повторяя этот цикл каждые несколько секунд. Они поддерживают эти измерения в стеке, заменяя наиболее старые измерения наиболее свежими. Поэтому линейная или полиномиальная низкого порядка аппроксимация измерений обеспечивает функцию прогнозирования для экстраполяции в ближайшее будущее или для интерполяции в недавнее прошлое. Предположим, что генераторы БППС достаточно стабильны, так что можно делать наджные предсказания на период, например, в десять минут. Затем каждые несколько минут виртуальный БИМ(ВБИМ) связывается с каждым реальным БИМ и принимает его функцию прогнозирования для принятых сдвигов сигналов от всех БППС в его наборе измерений. Это сходно с тем, что многие из БППС будут измеряться более, чем одним БИМ, так что ВБИМ анализирует полный набор данных от всех реальных БИМ с помощью общеизвестных способов, чтобы определить (а) наилучшие значения для сдвигов сигналов внутреннего времени реальных БИМ по времени, фазе, частоте или их производным, а следовательно(б) принятые сдвиги по времени, фазе, частоте или их производным для сигналов от всех БППС, которые измерялись бы реальным БИМ,расположенным в предполагаемом местоположении ВБИМ и способным принимать сигналы от каждой БППС. В приведнном выше описании функций ВБИМ следует понимать, что любой или все из БИМ могут заменяться другими примниками,не обязательно стационарными или находящимися в известных местоположениях, которые не установлены специально в качестве БИМ. Например, данные от нескольких мобильных телефонов могли бы использоваться для определения частотных сдвигов, если эти мобильные телефоны не перемещаются. Далее, в родственной патентной заявке (ссылочный номерMJB06427WO), поданной одновременно с настоящей заявкой, показано, как могут определяться местоположения и скорости мобильных телефонов вообще без необходимости использования каких-либо БИМ. 8 Конкретные преимущества от использования ВБИМ в сети включают в себя следующее:(а) можно гарантировать полное согласование между измерениями мобильного телефона и единственного (виртуального) БИМ;(б) процесс ВБИМ минимизирует ошибки синхронизации в измерениях отдельных БИМ;(в) перечень ВБИМ сразу же доступен для процесса вычисления местоположения, что увеличивает скорость вычислений;MJB06427WO), поданной одновременно с настоящей заявкой, можно создать перечень принятых временных сдвигов в сети БППС, где имеется мало реальных БИМ, если они вообще там есть;(д) ВБИМ обеспечивает в действительности карту синхронизации реальной сети БИМ,причем эта сеть может затем использоваться для отслеживания сети БППС и, в частности, для определения местоположений вновь устанавливаемых БППС. Пример осуществления способа и устройства согласно настоящему изобретению описан ниже со ссылками на чертежи, на которых показано следующее: фиг. 1 - геометрия системы CURSOR, описанной в заявке ЕПВ 0880712; фиг. 2 - соседние БИМ, осуществляющие измерения для общей БППС; фиг. 3 - сеть из реальных и виртуальных БИМ в системе, соответствующей изобретению; фиг. 4 - аналогичная упрощнная сеть; фиг. 5 - местоположения позиций БИМ и позиций БППС в реальной сети; фиг. 6 - та же самая сеть с добавлением виртуального БИМ; фиг. 7 - та же самая сеть, в которой реальные БИМ заменены виртуальным БИМ; фиг. 8 - блок-схема алгоритма, иллюстрирующего обработку в БИМ; фиг. 9 - блок-схемы алгоритма, иллюстрирующего обработку в ВБИМ; фиг. 10 - перечень временных сдвигов, выработанных в реальной системе по фиг. 5-9; и фиг. 11 - таблица временных ошибок, связанных с БИМ и виртуальным БИМ в приведенном примере. Ниже на примере со ссылкой на фиг. 3 описана функция виртуального БИМ, который определяет сдвиги синхронизации. Рассмотрим сеть из N БППС, которая включает в себя виртуальный БИМ (ВБИМ). Местоположение n-го БИМ, Un, представляется векторомun, а местоположение m-й БППС, Вm, представляется вектором bm, причм оба этих вектора взяты по отношению к одному и тому же началу координат. Сигналы, излучнные m-ой БППС, будут приниматься n-ым БИМ послевременного лага, и измерение этого временного лага tnm задатся уравнением где n - временной сдвиг синхросигналов n-го БИМ, m - временной сдвиг передачи m-ой БППС, оба по отношению к воображаемому универсальному "абсолютному" времени, а nm оценка ошибки в измерении tnm. Предполагаемое местоположение V виртуального БИМ представляется вектором v. Если бы ВБИМ был способен принимать сигналы непосредственно от m-ой БППС без ошибки, то он измерил бы принятый временной сдвиг m относительно воображаемого универсального абсолютного времени, задаваемый уравнением Замена m в уравнении (7) с помощью значения, выведенного из уравнения (8), дат Во всей сети из N БИМ наблюдаются все М БППС. Каждый отдельный БИМ, однако, будет наблюдать только несколько из них, но поскольку имеется значительное перекрытие в наблюдаемости, то можно взять набор всех значений t и получить решение для всех значенийn и m. Следовательно, ВБИМ может вычислить синхронизации для любой БППС, как если бы сеть из БИМ была синхронизирована, или как если бы только один БИМ (ВБИМ V) представлял собой то, что нужно для покрытия всей сети БППС. Чтобы проиллюстрировать это далее, ниже показана и решена упрощнная проблема с помощью N = 2 и М = 4, т.е. сети, состоящей только из 2 БИМ и 4 БППС (см. фиг. 4). Для простоты выбрано, что 1 = 0. Это позволяет считать,что "абсолютное" время синхронизации совершенно произвольно и может, к примеру, измеряться внутренним временем БИМ 1. Отметим, однако, что этот выбор вводит асимметрию в решение в том, что ошибки, связанные с БППС 3 и 4, не одни и те же. Первый БИМ (U1) может принимать сигналы от БППС 1, 2 и 3,но не может принимать сигналы от БППС 4. Уравнения могут быть записаны в матричном виде как или эквивалентно как Ах = b + z, где Z - это неизвестный вектор действительных ошибок в каждом измерении. Стандартный метод, известный как "метод наименьших квадратов", устанавливает, что оценка для х, которая минимизирует Z, задатся уравнением 10 где символ АT указывает транспонирование матрицы А, а матрица W определяется выражением Этот конкретный пример можно решить точно. Для простоты предполагается, что все значения nm одни и те же и равны . Это дат результат где Отметим, что даже в этом простом случае,когда БППС наблюдается обоими БИМ, ошибки в вычисленных сдвигах меньше, чем ошибки в каждом из их собственных измерений. Это важное преимущество способа виртуального БИМ. БИМ могут также содержать другие средства синхронизации. Например, каждый реальный БИМ может быть соединн с приемником сигналов GPS или другим примником G опорного тактирования, который служит для обеспечения общего эталона тактирования. В этом случае сеть БИМ может рассматриваться как уже синхронизированная с этим общим эталоном тактирования (например, стандартным временем GPS), и затем ВБИМ не требует решения для отдельных значений , так как они уже известны. Одно из преимуществ использования других средств синхронизации состоит в том,что больше не требуется перекрывать видимость БППС между находящимися рядом БИМ. Если на каждой позиции БППС также имеется и БИМ, то тогда БИМ должен только принимать(очень сильные) сигналы от размещнного совместно с ним передатчика(ов) БППС, благодаря чему упрощается установка антенны БИМ. Режим ВБИМ работы, описанный выше,может быть назван "режимом вытягивания", так как он требует, чтобы ВБИМ обеспечивал перенос данных к себе от каждого реального БИМ. Возможно также, чтобы каждый реальный БИМ непрерывно определял разность между своим собственным предсказанием принятого временного сдвига от каждой БППС с помощью значений, вычисленных из набора предсказаний, посланных последними к ВБИМ, и действительными измеренными значениями. Когда любая из этих разностей превысит заданное значение,БИМ может послать свой новый набор предсказаний в ВБИМ. Этот режим работы может быть назван "режимом выталкивания". Конкретный 11 режим, пригодный для реальной системы, зависит, среди прочего, от стабильности сети БППС. Ниже описан пример опытного образца системы, построенного в соответствии с изобретением, в котором измерения тактирования, выполненные несколькими БИМ, объединяются для формирования перечня принятых временных сдвигов для всех БППС GSM в Кембридже(Великобритания) и в его окрестности, как если бы они наблюдались единственным "виртуальным" БИМ. Местоположения девяти БИМ U1-U9 (показаны как заполненные круги) и двадцати трх БППС B1-В 23 в районе Кембриджа (показаны незаполненными квадратами) построены на фиг. 5 на землемерной сетке. Каждый БИМ содержит(а) аппаратное обеспечение, включающее в себя внутреннее время, радиоприемник GSM, компьютер и телефонное соединение, и (б) программное обеспечение, включающее в себя программу для компилирования перечня принятых временных сдвигов. Фиг. 8 иллюстрирует посредством блоксхемы алгоритма основные элементы программного обеспечения БИМ, находящиеся в каждом БИМ U1-U9. Каждые несколько секунд программа "цикла поиска" вводится на шаге А 1. Эта программа производит на шагах А 2, A3, А 6 и А 7 настройку радиоприемника GSM по очереди на каждый канал передачи GSM и ищет сигналы канала управления вещанием. В случае,когда обнаруживается сигнал канала управления вещанием на шаге A3, эта программа вычисляет принятый временной сдвиг сигнала относительно сигнала своего внутреннего времени(на шаге А 4) и соответственно обновляет свой перечень временных сдвигов на шаге А 5. Канал управления вещанием также декодируется для выработки идентификатора БППС Вn, от которой получен этот сигнал. Фиг. 5 показывает также линии между БИМ и БППС, обнаруженными ими в результате действия подпрограммы цикла поиска. Фиг. 6 показывает местоположения девяти БИМ, двадцати трх БППС, отслеживаемых этими БИМ, и Виртуальный БИМ V (изображнный как незаполненный круг). Виртуальный БИМ V содержит: (а) аппаратное обеспечение,включающее в себя телефонное соединение с каждым реальным БИМ и компьютер, и (б) программное обеспечение, включающее в себя программу для компиляции перечня "виртуальных" принятых временных сдвигов. Фиг. 9 иллюстрирует посредством блоксхемы алгоритма основные элементы программного обеспечения ВБИМ. Каждые 4 мин программа "обновление ВБИМ" вводится на шаге V1. Эта программа устанавливает на шагахV2, V3, V5 и V6 соединение с каждым из реальных БИМ посредством телефонных соединений. Если соединение с данным БИМ U1-U9 успешно,эта программа на шаге V4 извлекает перечень 12 принятых временных сдвигов этого БИМ. По завершении цикла соединения программа (на шаге V7) объединяет данные для выработки перечня принятых временных сдвигов для всех БППС, отслеживаемых сетью БИМ. Пример этого перечня показан на фиг. 10, где воспроизведена часть таблицы принятых временных сдвигов, выработанной ВБИМ. Первый столбец показывает идентификатор БППС, а цифры в таблице приведены в единицах по 1,85 мкс. Фиг. 6 также показывает линии между ВБИМ V и каждым реальным БИМ U1-U9, из которых программное обеспечение ВБИМ способно извлекать перечень временных сдвигов. По завершении "обновления ВБИМ" объединнный перечень выработанных тактирований эквивалентен тому, который наблюдался бы, если бы в местоположении ВБИМ имелся единственный (реальный) БИМ, выполняющий измерения тактирования каждой БППС в сети. Фиг. 7 иллюстрирует эту эквивалентность, показывая виртуальное отслеживание измерений тактирования каждой БППС виртуальным БИМ(показанным как линии между ВБИМ V и БППСB1-В 23). Каждое измерение тактирования имеет связанную с ним ошибку, которая в большинстве случаев меньше, чем ошибки в измерениях тактирования, выполненных отдельными реальными БИМ. Это иллюстрируется в таблице фиг. 11, которая показывает часть перечня, выработанного ВБИМ во время работы. Первый столбец показывает идентификатор каждой БППС. Столбцы 1-9 относятся, каждый, к конкретному одному из девяти реальных БИМ. Цифры в таблице представляют собой ошибки в измерениях тактирования, выполненных реальными БИМ,для сигналов от соответствующих БППС. Пустые ячейки показывают, что БИМ не может принять сигнал БППС. Столбец, озаглавленный ВБИМ, показывает результат объединения измерений с помощью описанного выше способа. Тактирования в таблице фиг. 11 даны в единицах по 1,85 мкс. Отметим, что ошибки тактирования ВБИМ в общем случае меньше,чем ошибки, оценнные для тактирований реальных БИМ, что подтверждает преимущества способа ВБИМ по снижению ошибок. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передачи, соответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги:(а) получение данных от двух или более примников, местоположение которых может быть известно или определено, причм данные от при 13 мника содержат сдвиги по времени, фазе, частоте или их производным соответственно для сигналов,принятых от источников передач, по отношению к опорному источнику в каждом примнике или друг к другу; и(б) объединение полученных данных и вычисление перечня сдвигов, соответствующих заданному местоположению, по отношению к общему эталону. 2. Способ формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, включающий в себя следующие шаги:(а) получение данных от двух или более примников, местоположения которых могут быть известны или определены, причм данные от примника представляют эти принятые сигналы;(б) определение из полученных данных сдвигов по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику или друг к другу; и(в) объединение определнных таким образом сдвигов и вычисление перечня сдвигов, соответствующих заданному местоположению, относительно общего эталона. 3. Способ радиопозиционирования для определения местоположения одного или более примников, местоположение которых неизвестно,включающий в себя способ по п.1 или 2. 4. Способ радиопозиционирования по п.3, в котором общий эталон содержит внешний эталон. 5. Способ радиопозиционирования по п.4, в котором общий эталон содержит сигнал глобальной системы определения местоположения (GPS). 6. Способ радиопозиционирования по любому из пп.3-5, в котором шаг получения данных от одного или более примников включает в себя обеспечение получения упомянутых данных из общего местоположения. 7. Способ радиопозиционирования по любому из пп.3-5, в котором шаг получения данных от двух или более примников включает в себя обеспечение получения упомянутых данных от каждого упомянутого примника в моменты времени,определнные каждым упомянутым примником. 8. Устройство для формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, содержащее(а) средство для получения данных от двух или более примников, местоположения которых могут быть известны или определены, причм 14 данные от примника содержат сдвиги по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику в каждом примнике или друг к другу; и(б) средство для объединения полученных данных и вычисления перечня сдвигов, соответствующих заданному местоположению, по отношению к общему эталону. 9. Устройство для формирования перечня сдвигов по времени, фазе, частоте или их производным, либо их эквивалентов, выраженных как сдвиги по расстоянию или их производные, для множества сигналов источников передач, соответствующих заданному местоположению, по отношению к общему эталону, содержащее(а) средство для получения данных от двух или более примников, местоположения которых могут быть известны или определены, причм данные от примника представляют эти принятые сигналы;(б) средство для определения из полученных данных сдвигов по времени, фазе, частоте или их производным соответственно для сигналов, принятых от источников передач, по отношению к опорному источнику или друг к другу; и(в) средство для объединения определнных таким образом сдвигов и вычисления перечня сдвигов, соответствующих заданному местоположению, относительно общего эталона. 10. Система радиопозиционирования, включающая в себя устройство по п.8 или 9. 11. Система радиопозиционирования по п.10,в которой общий эталон содержит эталон, внешний для упомянутых примников. 12. Система радиопозиционирования по п.11,в которой общий эталон содержит сигнал GPS. 13. Система радиопозиционирования по любому из пп.10-12, в которой средство для получения данных от двух или более примников включает в себя компьютерную систему, выполненную с возможностью переноса упомянутых данных от упомянутых двух или более примников в упомянутую компьютерную систему в моменты времени, определнные упомянутой компьютерной системой. 14. Система радиопозиционирования по любому из пп.10-13, в которой средство для получения данных от двух или более примников включает в себя компьютерную систему, причем система радиопозиционирования включает в себя средство для обеспечения получения данных от каждого упомянутого примника в моменты времени, определнные каждым упомянутым примником. 15. Цифровая телефонная сеть, включающая в себя систему радиопозиционирования по любому из пп. 10-14.
МПК / Метки
Метки: системах, усовершенствования, радиопозиционирования
Код ссылки
<a href="https://eas.patents.su/10-3115-usovershenstvovaniya-v-sistemah-radiopozicionirovaniya.html" rel="bookmark" title="База патентов Евразийского Союза">Усовершенствования в системах радиопозиционирования</a>
Способ и устройство для точной синхронизации частоты в системах демодуляции множества несущих
Номер патента: 2748
Опубликовано: 29.08.2002
Авторы: Хойбергер Альберт, Бадри Сабах, Эберляйн Эрнст, Герхойзер Хайнц, Буххольц Штефан, Липп Штефан
МПК: H04L 27/26
Метки: синхронизации, точной, демодуляции, несущих, системах, множества, способ, частоты, устройство
Формула / Реферат:
1. Способ выполнения точной синхронизации частоты, компенсирующей девиацию частоты несущей относительно частоты генератора в системе демодуляции множества несущих, обеспечивающий дифференциальное фазовое декодирование сигналов, модулированных на основе множества несущих, причем сигналы содержат множество символов и каждый символ определяется разностью фаз между одновременными несущими, имеющими разные частоты, причем способ включает этапы а)...
Способ формирования изображения в системах с перемещающимися относительно друг друга объектами
Номер патента: 2467
Опубликовано: 25.04.2002
Автор: Курганов Игорь Петрович
МПК: G03B 21/00, G09F 9/30
Метки: системах, относительно, друг, способ, объектами, формирования, друга, изображения, перемещающимися
Формула / Реферат:
1. Способ формирования изображения в системах с перемещающимися относительно друг друга объектами, заключающийся в том, что - разбивают каждый кадр формируемого изображения на фрагменты, состоящие каждый из одного или более элементов изображения и расположенные вдоль направления относительного перемещения объекта, принимающего визуальную информацию; - каждый кадр изображения формируют с помощью развёртки отдельной матрицей излучателей, каждая из...
Способ адаптивной калмановской фильтрации в динамических системах
Номер патента: 1188
Опубликовано: 25.12.2000
Автор: Ланге Антти Аарне Илмари
МПК: G01D 18/00
Метки: адаптивной, способ, динамических, калмановской, фильтрации, системах
Формула / Реферат:
1. Способ регулирования модели и параметров калибровки чувствительной системы, сопровождаемый вместе с упомянутой моделью внешними событиями посредством адаптивной калмановской фильтрации, при этом блоки вывода сигналов датчиков обеспечивают сигналы в ответ на упомянутые внешние события, и где ряд одновременно обрабатываемых значений выходных сигналов датчиков являются длинным, содержащий следующие шаги: а) обеспечение блока базы данных для...
Грубая синхронизация частоты в системах с множеством несущих

Номер патента: 2529
Опубликовано: 27.06.2002
Авторы: Хойбергер Альберт, Буххольц Штефан, Герхойзер Хайнц, Липп Штефан, Эберляйн Эрнст, Бадри Сабах
МПК: H04L 27/26
Метки: грубая, системах, синхронизация, множеством, несущих, частоты
Формула / Реферат:
1. Способ выполнения грубой синхронизации частоты, компенсирующий девиацию частоты несущей относительно частоты генератора в системе демодуляции, обеспечивающей демодуляцию сигнала со структурой кадра, содержащей, по меньшей мере, один полезный символ и опорный символ, представляющий собой амплитудно-модулированную битовую последовательность, причем способ включает этапы приема сигнала, преобразования принятого сигнала с понижением частоты,...
Усовершенствования в устройствах для дозирования лекарств
Номер патента: 2639
Опубликовано: 29.08.2002
Автор: Уорби Ричард Джон
МПК: B65D 83/14, A61M 15/00, B05D 7/24...
Метки: лекарств, дозирования, устройствах, усовершенствования
Формула / Реферат:
1. Находящийся под давлением баллончик-дозатор для дозирования медикамента, в котором, по меньшей мере, часть одной или более внутренних поверхностей деталей, которые вступают в контакт с медикаментом во время хранения или дозирования, имеет слой из одного или более полимеризовавшихся в холодной плазме мономеров, сцепленный, по меньшей мере, с частью поверхностей, причем слой состоит из полимеризовавшегося в холодной плазме фторированного...
Предыдущий патент: Способ публикации, поиска, сбора и обмена информацией в глобальных и локальных сетях
Следующий патент: Тросовый замок
Случайный патент: N-([1,2,4]триазолазинил)бензолсульфонамиды и пиридинсульфонамиды и их применение в качестве гербицидов