Управление мощностью прямой и обратной линии связи с использованием информации о положении и подвижности
Формула / Реферат
1. Способ управления мощностью обратной линии связи между мобильной станцией и, по меньшей мере, одной базовой станцией в системе беспроводной связи МДКР, причем мобильная станция содержит контур управления мощностью обратной линии связи, содержащий этапы, на которых идентифицируют мгновенное положение мобильной станции, идентифицируют мгновенную скорость мобильной станции с использованием информации о мгновенном положении и динамически подстраивают параметры контура управления мощностью обратной линии связи на основании мгновенного положения и/или мгновенной скорости, причем параметры контура управления мощностью включают в себя верхний предел отношения сигнал-шум (ОСШ), нижний предел ОСШ и размер шага приращения для регулировки мощности.
2. Способ по п.1, отличающийся тем, что на этапе динамической подстройки выбирают верхний предел ОСШ и/или нижний предел ОСШ на основании мгновенного положения и подстраивают выбранные верхний и нижний пределы ОСШ на основании мгновенной скорости.
3. Способ по п.2, отличающийся тем, что упомянутые выбор и подстройку производят с помощью заранее заданных таблиц перекодировки.
4. Способ по п.3, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
5. Способ по п.2, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
6. Способ по п.1, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
7. Способ по п.2, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью дифференциальной ГСП.
8. Способ по п.2, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью наземных базовых станций исключительно или в совокупности с информацией ГСП.
9. Способ по п.2, отличающийся тем, что на этапе динамической подстройки параметров контура управления мощностью дополнительно используют мгновенную скорость для переопределения шага приращения для регулировки мощности.
10. Способ по п.9, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации.
11. Способ по п.10, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки.
12. Способ по п.1, отличающийся тем, что на этапе подстройки параметров контура управления мощностью используют мгновенную скорость для переопределения шага приращения для регулировки мощности.
13. Способ по п.12, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации.
14. Способ по п.13, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки.
15. Способ по п.14, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
16. Способ управления мощностью прямой линии связи между базовой станцией и, по меньшей мере, одной мобильной станцией в системе беспроводной связи МДКР, причем базовая станция содержит схему управления мощностью прямой линии связи, содержащий этапы, на которых идентифицируют мгновенное положение мобильной станции, идентифицируют мгновенную скорость мобильной станции с использованием информации о мгновенном положении и динамически подстраивают параметры контура управления мощностью прямой линии связи на основании мгновенного положения и/или мгновенной скорости, причем параметры схемы управления мощностью включают в себя верхний предел уровня мощности, нижний предел уровня мощности и размер шага приращения для регулировки мощности.
17. Способ по п.16, отличающийся тем, что на этапе динамической подстройки выбирают верхний предел уровня мощности и/или нижний предел уровня мощности на основании мгновенного положения и подстраивают выбранные верхний и нижний пределы уровня мощности на основании мгновенной скорости.
18. Способ по п.17, отличающийся тем, что упомянутые выбор и подстройку производят с помощью заранее заданных таблиц перекодировки.
19. Способ по п.18, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
20. Способ по п.17, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
21. Способ по п.16, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
22. Способ по п.17, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью дифференциальной ГСП.
23. Способ по п.17, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью наземных базовых станций исключительно или в совокупности с информацией ГСП.
24. Способ по п.17, отличающийся тем, что на этапе динамической подстройки параметров контура управления мощностью дополнительно используют мгновенную скорость для переопределения шага приращения для регулировки мощности.
25. Способ по п.24, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения, и/или картографической информации, и/или фильтрации.
26. Способ по п.25, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки.
27. Способ по п.16, отличающийся тем, что на этапе динамической подстройки параметров контура управления мощностью используют мгновенную скорость для переопределения шага приращения для регулировки мощности.
28. Способ по п.27, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации.
29. Способ по п.28, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки.
30. Споёюс по п.29, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.

Текст
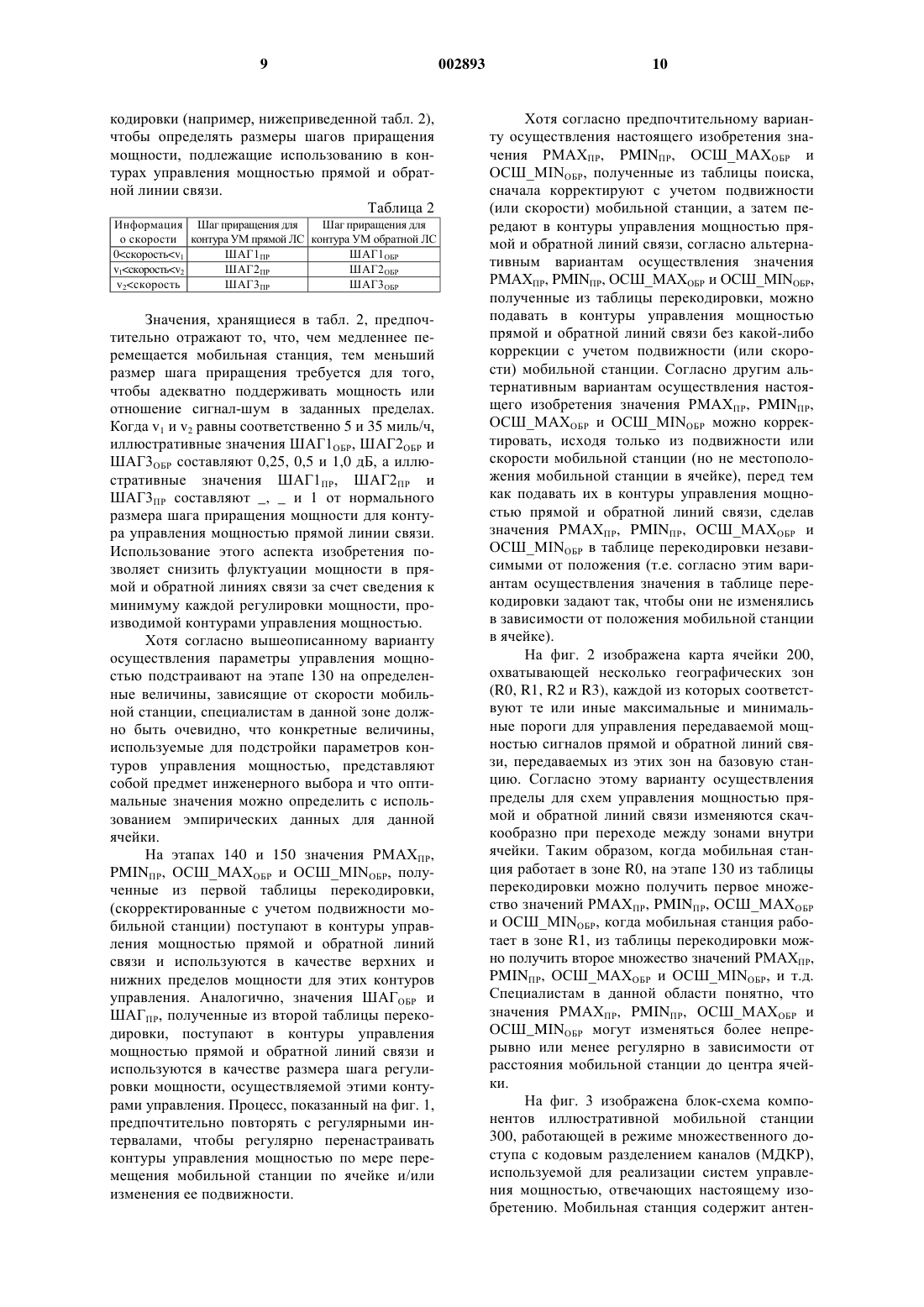
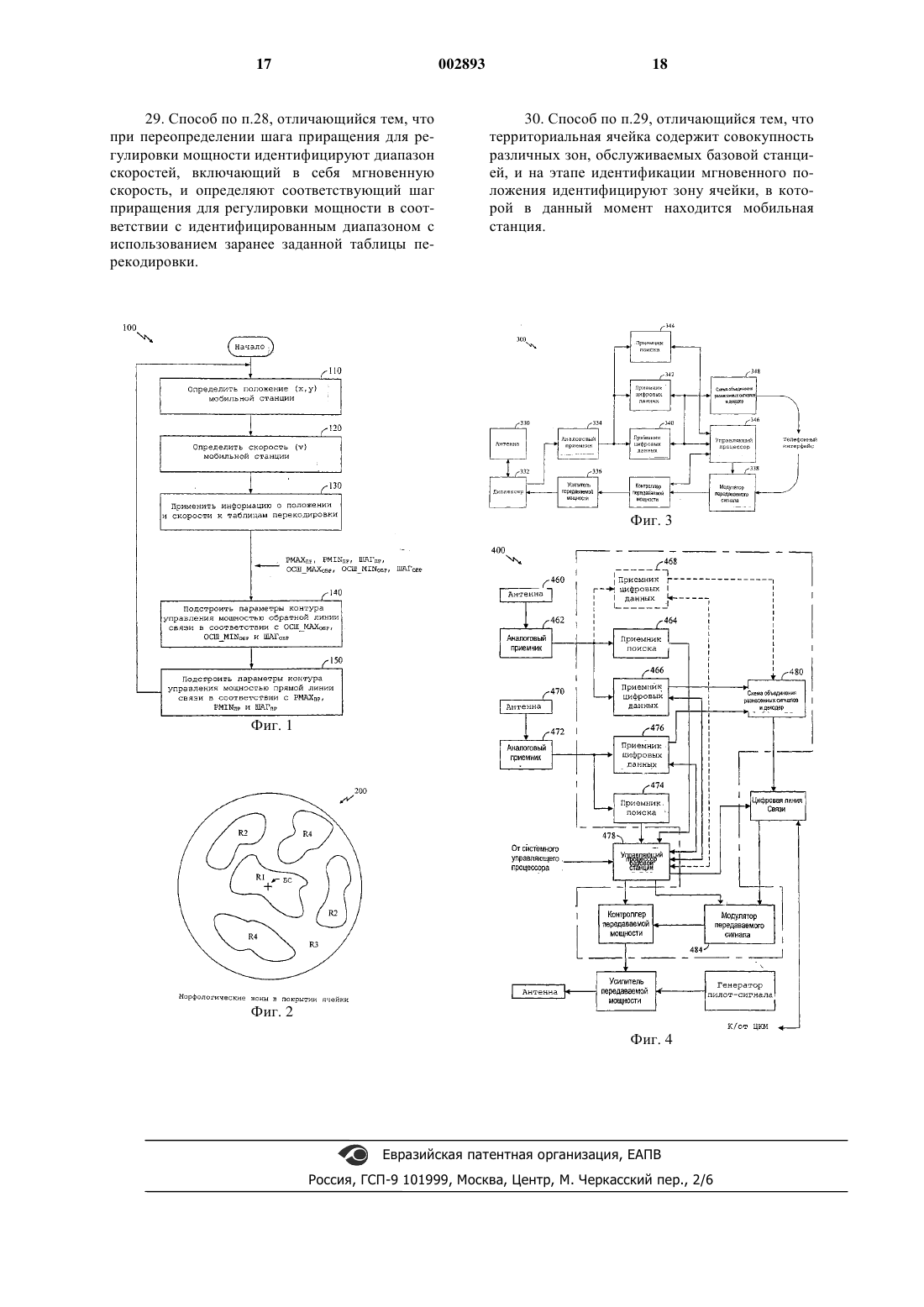
1 Область техники Настоящее изобретение относится к системам мобильной радиосвязи. Более конкретно,настоящее изобретение относится к системам управления мощностью для управления уровнем мощности сигналов, передаваемых по прямым линиям связи системы мобильной радиосвязи, и для управления отношением сигналшум сигналов, передаваемых по обратным линиям связи системы мобильной радиосвязи. Еще более конкретно, настоящее изобретение относится к новым системе и способу динамической подстройки параметров контуров управления мощностью прямой и обратной линий связи на основании положения и скорости мобильной станции. Предшествующий уровень техники В системах мобильной радиосвязи, например системах связи множественного доступа с кодовым разделением каналов (МДКР), уровни передаваемой мощности сигналов, передаваемых между базовой станцией и мобильной станцией, тщательно подстраивают с помощью контуров управления мощностью. Обычно один контур управления мощностью используют для поддержания уровня сигналов в прямой линии связи (т.е. сигналов, передаваемых от базовой станции к мобильной станции) между минимальным и максимальным уровнями. Другой контур управления мощностью, аналогично,используют для поддержания отношения сигнал-шум для принимаемых сигналов, передаваемых по обратной линии связи (т.е. измеряемого в базовой станции ОСШ для сигналов, передаваемых от мобильной станции к базовой станции), между требуемым минимальным уровнем и требуемым максимальным уровнем. Эти контуры управления мощностью обычно регулируют передаваемую мощность сигнала дискретными приращениями в сторону повышения или понижения (например, плюс или минус 1 дБ) , чтобы поддерживать уровень мощности либо отношение сигнал-шум между требуемыми максимальным и минимальным уровнями. В прежних системах МДКР управление мощностью прямой линии связи обычно осуществляли с использованием разомкнутого контура управления мощности, тогда как система управления мощностью обратной линии связи использовала замкнутый контур управления мощностью. В современных системах МДКР для управления мощностью прямой линии связи используют замкнутый контур управления мощностью, и ожидается, что в системах МДКР следующего поколения для управления мощностью прямой линии связи по-прежнему будет использоваться замкнутый контур управления мощностью. С каждой территориальной ячейкой системы мобильной радиосвязи обычно связана базовая станция, которая ее обслуживает. В совре 002893 2 менных системах параметры схемы управления мощностью прямой линии связи (т.е. минимальный уровень мощности, максимальный уровень мощности и размер шага приращения, связанные с контуром управления мощностью прямой линии связи) и предельные значения для контура управления мощностью обратной линии связи (т.е. требуемое минимальное отношение сигнал-шум, требуемое максимальное отношение сигнал-шум и размер шага приращения, связанные с контуром управления мощностью обратной линии связи) не зависят от положения и скорости мобильных блоков в ячейке. Требования к передаваемой мощности сигналов, передаваемых между базовой станцией и мобильной станцией, изменяются по мере того, как мобильная станция перемещается в пределах ячейки. Например, когда мобильная станция приближается к базовой станции, для достижения того же отношения сигнал-шум сигнала, принимаемого в базовой станции,обычно требуется меньшая мощность в обратной линии связи. Таким образом, когда мобильная станция приближается к базовой станции,передаваемая мощность в обратной линии связи обычно снижается, тогда как отношение сигналшум принимаемого сигнала в базовой станции остается постоянным. Кроме того, когда мобильная станция неподвижна или перемещается медленно (в отличие от случая быстрого перемещения мобильной станции), для достижения того же отношения сигнал-шум сигнала, принимаемого в базовой станции, обычно требуется меньшая передаваемая мощность. Таким образом, при замедлении движения мобильной станции передаваемую мощность в обратной линии связи обычно можно снижать, в то же время поддерживая одно и то же отношение сигналшум сигнала, принимаемого в базовой станции. Пропускная способность данной системы мобильной радиосвязи ограничена передаваемой мощностью, на которой может работать базовая станция, и требованием к отношению сигнал-шум в обратной линии связи. Таким образом, для повышения емкости системы нужно снижать передаваемую мощность базовой станции и/или отношение сигнал-шум в обратной линии связи. В связи с этим желательно иметь систему управления мощностью, которая способна динамически подстраивать параметры контуров управления мощностью прямой и обратной линий связи при изменении положения и/или скорости мобильной станции с целью экономии передаваемой мощности и повышения пропускной способности ячейки. Сущность изобретения Задачей настоящего изобретения является достижение максимальной пропускной способности данной ячейки путем подстройки одного или обоих предельных значений контура управления мощностью с использованием положения мобильной станции в пределах ячейки. Один 3 вариант осуществления настоящего изобретения предусматривает динамическую подстройку параметров контура управления мощностью,предназначенного для поддержания передаваемой мощности сигнала, передаваемого от базовой станции в мобильную станцию, выше минимального порога. Согласно этому варианту осуществления определяют информацию положения, выражающую расстояние и морфологию между мобильной станцией и базовой станцией. Затем в соответствии с информацией положения минимальный порог контура управления мощностью подстраивают таким образом, чтобы минимальный порог изменялся по мере изменения расстояния и морфологии между мобильной станцией и базовой станцией. Затем передатчик передает сигнал, уровень мощности которого регулируется контуром управления мощностью с подстроенным минимальным порогом. Этот аспект изобретения можно использовать для управления минимальным уровнем мощности,связанным с контуром управления мощностью прямой линии связи. Другой вариант осуществления настоящего изобретения предусматривает динамическую подстройку параметров контура управления мощностью, предназначенной для поддержания отношения сигнал-шум сигнала, передаваемого от мобильной станции в базовую станцию, выше минимального порога. Согласно этому варианту осуществления определяют информацию положения, выражающую расстояние и морфологию между мобильной станцией и базовой станцией. Затем в соответствии с информацией положения и морфологии минимальный порог контура управления мощностью корректируют таким образом, чтобы минимальный порог изменялся с изменением расстояния и морфологии между мобильной станцией и базовой станцией. Затем передатчик передает сигнал, уровень мощности которого регулируется контуром управления мощностью с подстроенным минимальным порогом. Этот аспект изобретения можно использовать для управления требуемым минимальным отношением сигнал-шум (т.е. требуемым минимальным отношением сигналшум обратной линии связи для сигнала, принимаемого в базовой станции) в контуре управления мощностью обратной линии связи. Другие альтернативные варианты осуществления настоящего изобретения также предусматривают определение информации о скорости, представляющей скорость мобильной станции. Согласно этим вариантам осуществления минимальный порог контура управления мощностью подстраивается на основании одной лишь информации о скорости или, альтернативно, минимальный порог контура управления мощностью подстраивается на основании информации о скорости и мгновенном положении мобильной станции. Этот аспект изобретения можно также использовать для управления ми 002893 4 нимальными порогами, связанными с контурами управления мощностью прямой и обратной линий связи, и он особенно полезен в комбинированных беспроводных сетях, где присутствуют стационарные беспроводные пользователи(также именуемые пользователями беспроводного абонентского шлейфа) и мобильные беспроводные пользователи (т.е. пользователи, изменяющие свое положение). В таких комбинированных беспроводных сетях подстройка минимальных порогов, связанных с контурами управления мощностью прямой и обратной линий связи, на основании скорости беспроводного пользователя обеспечивает эффективное распределение системных ресурсов. Согласно еще одному аспекту максимальный порог контура управления мощностью прямой линии связи (т.е. уровень мощности,ниже которого контур управления мощностью пытается поддерживать передаваемую мощность сигнала, передаваемого с базовой станции) также подстраивается в соответствии с информацией о положении (и, возможно, информацией о скорости) таким образом, чтобы максимальный порог изменялся с изменением расстояния и морфологии между мобильной станцией и базовой станцией (и, возможно, скорости мобильной станции). Согласно еще одному аспекту максимальный порог контура управления мощностью обратной линии связи (т.е. нужное максимальное отношение сигнал-шум, ниже которого контур управления мощностью пытается поддерживать отношение сигнал-шум сигнала обратной линии связи, принимаемого в базовой станции) также подстраивается в соответствии с информацией о положении (и, возможно, информацией о скорости) таким образом, чтобы максимальный порог изменялся с изменением расстояния и морфологии между мобильной станцией и базовой станцией (и, возможно, скорости мобильной станции). Согласно еще одному аспекту размер шага приращения для контура управления мощностью (т.е. дискретное приращение мощности,используемое в контуре управления мощностью для регулировки передаваемой мощности сигнала в сторону увеличения или уменьшения) также подстраивается в соответствии с информацией о скорости таким образом, чтобы размер шага приращения изменялся с изменением скорости мобильной станции. Согласно этому аспекту размер шага приращения, используемый в контуре управления мощностью, предпочтительно уменьшается для неподвижных или медленно движущихся мобильных станций и размер шага приращения увеличивается, когда мобильная станция начинает перемещаться быстрее. Этот аспект изобретения можно использовать для управления размером шага приращения в контуре управления мощностью либо прямой линии связи, либо обратной линии связи. 5 Краткое описание чертежей Для лучшего понимания изобретения представлено более подробное описание изобретения, кратко описанного выше, со ссылкой на конкретные варианты его осуществления,проиллюстрированные на прилагаемых чертежах. С учетом того, что эти чертежи отражают лишь типичный вариант осуществления изобретения и поэтому не должны рассматриваться как факторы ограничения его объема, изобретение и вышеупомянутые основные варианты его осуществления будут описаны и объяснены более подробно с использованием прилагаемых чертежей, на которых представлено следующее: фиг. 1 - логическая блок-схема способа коррекции минимального и максимального пределов для контуров управления мощностью прямой и обратной линий связи в системе мобильной радиосвязи согласно предпочтительному варианту осуществления настоящего изобретения; фиг. 2 - карта ячейки, охватывающей несколько географических зон, каждой из которых соответствует отдельный минимальный порог мощности для управления передаваемой мощностью сигналов обратной линии связи, передаваемых из этих зон в базовую станцию, согласно предпочтительному варианту осуществления настоящего изобретения; фиг. 3 - блок-схема, на которой изображены компоненты иллюстративной мобильной станции МДКР, используемой для реализации систем управления мощностью, отвечающих настоящему изобретению; фиг. 4 - блок-схема, на которой изображены компоненты иллюстративной базовой станции, используемой для реализации систем управления мощностью, отвечающих настоящему изобретению. Подробное описание предпочтительного варианта осуществления На фиг. 1 изображена логическая блоксхема способа коррекции минимальных пределов, максимальных пределов и размера шага приращения для контуров управления мощностью прямой и обратной линий связи в системе мобильной радиосвязи согласно предпочтительному варианту осуществления настоящего изо 002893 6 бретения. На этапе 110 определяют положение Р(х,у) мобильной станции с использованием,например, результатов измерений, полученных как с помощью Глобальной системы позиционирования (ГСП), так и с помощьюсистемной инфраструктуры. Положение мобильной станции на этом этапе предпочтительно определять с использованием дифференциальной ГСП и в соответствии со способом, раскрытым в патентной заявке США 09/040,501 на Систему и способ определения положения беспроводного приемопередатчика МДКР от 17 марта 1998 г.,права на которую переуступлены правопреемнику настоящего изобретения, содержание которой включено в настоящее описание во всей полноте посредством ссылки. Согласно альтернативному варианту осуществления положение мобильной станции можно определять с использованием, по меньшей мере, трех (и предпочтительно большего количества) наземных базовых станций, входящих в системную инфраструктуру. На этапе 120 перемещение мобильной станции моделируют (предпочтительно с использованием полученных результатов измерения положения), чтобы оценить мгновенную скорость (или диапазон возможных значений скорости) мобильной станции. Для моделирования мгновенной скорости мобильной станции также можно использовать картографическую информацию, согласно которой мобильная станция находится на улице или магистрали,которая ориентирована в известном направлении. Методы фильтрации позволяют дополнительно усовершенствовать процедуру оценки траектории. Например, фильтр Калмана позволяет адаптивно отслеживать траекторию мобильной станции, а, следовательно, прогнозировать ее динамическое состояние, выраженное через скорость и положение. На этапе 130 данные положения мобильной станции применяют к таблице перекодировки, связанной с ячейкой (например, нижеприведенной табл. 1), чтобы определить верхний и нижний пределы для контуров управления мощностью прямой и обратной линий связи. Таблица 1 Информация положения Пределы для контура УМ прямой ЛС Пределы для контура УМ обратной ЛС Долгота Широта Макс. мощность Мин. мощность Требуемое макс. ОСШ Требуемое мин. ОСШPMIN4 ПР ОСШМАХ 4 ОБР ОСШМIN4 ОБР Согласно одному варианту осуществления,значения параметров контуров управления мощностью, хранящиеся в таблице, определяют эмпирически, собирая данные, отражающие требования к мощности мобильного пользова теля в зависимости от его местонахождения в ячейке. Для сбора данных можно, например,использовать мобильную станцию со средствами определения местоположения, имеющуюся у почтальона, и отслеживать, как меняются тре 7 бования к мощности мобильной станции по мере того, как почтальон перемещается в пределах ячейки, разнося почту. Согласно этому варианту осуществления уровни мощности прямой линии связи и отношение сигнал-шум обратной линии связи отслеживают и сохраняют для разных положений в пределах ячейки по мере перемещения мобильной станции по ячейке. После этого для каждого отслеженного положения или зоны в ячейке значения ОСШМАХОБР и ОСШMINОБР, выражающие максимальное и минимальное отношения сигнал-шум, связанные с контуром управления мощностью обратной линии связи и подлежащие сопоставлению с тем или иным положением или той или иной зоной, выбирают, например, прибавляя заданные разностные значения к отношению сигналшум (или соответственно вычитая их) обратной линии связи для сигнала обратной линии связи,который был измерен в базовой станции, когда мобильная станция находилась в упомянутом положении или зоне. Иными словами, значение ОСШМАХОБР для данной зоны получают, прибавляя определенное разностное значение, выраженное в дБ, к отношению сигнал-шум обратной линии связи, которое было измерено в базовой станции, когда мобильная станция находилась в этом положении или зоне, а значение ОСШMINОБР для той же зоны получают, вычитая определенное разностное значение, выраженное в дБ, из отношения сигнал-шум обратной линии связи, которое было измерено в базовой станции, когда мобильная станция находилась в этом положении или зоне. Аналогично,для каждого отслеженного положения или зоны в пределах ячейки значения РМАХПР и PMINПР,выражающие верхнюю и нижнюю границы мощности для контура управления мощностью прямой линии связи, подлежащие сопоставлению с тем или иным местом или той или иной зоной, выбирают, например, прибавляя заданные разностные значения мощности к измеренному уровню мощности прямой линии связи(или соответственно вычитая их) в данном положении или зоне. Иными словами, значение РМАХПР для данной зоны получают, прибавляя определенное разностное значение, выраженное в дБ, к уровню мощности прямой линии связи,который был измерен, когда мобильная станция находилась в этом положении или зоне, а значение PMINПР для данной зоны получают, вычитая определенное разностное значение, выраженное в дБ, из уровня мощности прямой линии связи, который был измерен, когда мобильная станция находилась в этом положении или зоне. На этапе 130, выбрав значения РМАХПР,PMINПР, ОСШМАХОБР и OCШMINОБР из таблицы перекодировки, эти значения подстраивают, исходя из скорости мобильной станции. Этот аспект изобретения позволяет учитывать,что малоподвижные пользователи (например,мобильные станции, движущиеся со скоростью 8 менее 5 миль/ч, т.е. со скоростью пешехода) испытывают замирания в меньшей степени, чем высокоподвижные пользователи, и что, в итоге,прямая и обратная линии связи, связанные с малоподвижными пользователями, могут работать в более узких пределах управления мощностью. Согласно этому аспекту изобретения в случаях, когда пользователь перемещается со скоростью ниже определенной скорости, например 5 миль/ч, из значений РМАХПР и ОСШМАХОБР вычитают определенную величину (например, 2 дБ), а к значениям PMINПР и ОСШМINОБР прибавляют определенную величину (например, 2 дБ), после чего на этапах 140 и 150 передают скорректированные значения РМАХПР,PMINПР,ОСШМАХОБР и ОСШMINОБР в контуры управления мощностью. Этот аспект изобретения аналогично позволяет учитывать, что высокоподвижные пользователи (например, мобильные станции, движущиеся со скоростями свыше 35 миль/ч) будут испытывать замирания в большей степени, чем малоподвижные пользователи, и что, в итоге,прямая и обратная линии связи, связанные с такими высокоподвижными пользователями,должны работать в более широких пределах управления мощностью. Согласно этому аспекту изобретения в случаях, когда пользователь перемещается со скоростью, превышающей определенную скорость, например 35 миль/ч, к значениям РМАХПР и ОСШМАХОБР прибавляют определенную величину (например, 2 дБ), а из значений PMINПР и ОСШМINОБР вычитают определенную величину (например, 2 дБ) , после чего на этапах 140 и 150 передают значения РМАХПР,PMINПР,ОСШМАХОБР иOCШMINОБР в контуры управления мощностью. Подстройка РМАХПР, PMINПР, ОСШМАХОБР и OCШMINОБР на основании скорости мобильной станции, производимая на этапе 130, особенно важна в комбинированных беспроводных сетях, где присутствуют стационарные беспроводные пользователи (также именуемые пользователями беспроводных абонентских шлейфов) и мобильные беспроводные пользователи (т.е. пользователи, изменяющие свое положение). В таких комбинированных беспроводных сетях коррекция минимальных порогов, связанных с контурами управления мощностью прямой и обратной линий связи, на основании скорости беспроводного пользователя обеспечивает эффективное распределение системных ресурсов. Применительно к настоящему изобретению термин мобильная станция означает мобильную станцию наподобие мобильной станции 300, изображенной на фиг. 3, вне зависимости от того, является ли пользователь такой станции стационарным беспроводным пользователем или мобильным беспроводным пользователем. На этапе 130, данные о скорости мобильной станции также применяют к таблице пере 9 кодировки (например, нижеприведенной табл. 2),чтобы определять размеры шагов приращения мощности, подлежащие использованию в контурах управления мощностью прямой и обратной линии связи. Таблица 2 Информация Шаг приращения для Шаг приращения для о скорости контура УМ прямой ЛС контура УМ обратной ЛС 0 скоростьv1 ШАГ 1 ПР ШАГ 1 ОБР Значения, хранящиеся в табл. 2, предпочтительно отражают то, что, чем медленнее перемещается мобильная станция, тем меньший размер шага приращения требуется для того,чтобы адекватно поддерживать мощность или отношение сигнал-шум в заданных пределах. Когда v1 и v2 равны соответственно 5 и 35 миль/ч,иллюстративные значения ШАГ 1 ОБР, ШАГ 2 ОБР и ШАГ 3 ОБР составляют 0,25, 0,5 и 1,0 дБ, а иллюстративные значения ШАГ 1 ПР, ШАГ 2 ПР и ШАГ 3 ПР составляют ,и 1 от нормального размера шага приращения мощности для контура управления мощностью прямой линии связи. Использование этого аспекта изобретения позволяет снизить флуктуации мощности в прямой и обратной линиях связи за счет сведения к минимуму каждой регулировки мощности, производимой контурами управления мощностью. Хотя согласно вышеописанному варианту осуществления параметры управления мощностью подстраивают на этапе 130 на определенные величины, зависящие от скорости мобильной станции, специалистам в данной зоне должно быть очевидно, что конкретные величины,используемые для подстройки параметров контуров управления мощностью, представляют собой предмет инженерного выбора и что оптимальные значения можно определить с использованием эмпирических данных для данной ячейки. На этапах 140 и 150 значения РМАХПР,PMINПР, ОСШМАХОБР и ОСШМINОБР, полученные из первой таблицы перекодировки,(скорректированные с учетом подвижности мобильной станции) поступают в контуры управления мощностью прямой и обратной линий связи и используются в качестве верхних и нижних пределов мощности для этих контуров управления. Аналогично, значения ШАГОБР и ШАГПР, полученные из второй таблицы перекодировки, поступают в контуры управления мощностью прямой и обратной линий связи и используются в качестве размера шага регулировки мощности, осуществляемой этими контурами управления. Процесс, показанный на фиг. 1,предпочтительно повторять с регулярными интервалами, чтобы регулярно перенастраивать контуры управления мощностью по мере перемещения мобильной станции по ячейке и/или изменения ее подвижности. 10 Хотя согласно предпочтительному варианту осуществления настоящего изобретения значения РМАХПР, PMINПР, ОСШМАХОБР и ОСШМINОБР, полученные из таблицы поиска,сначала корректируют с учетом подвижности(или скорости) мобильной станции, а затем передают в контуры управления мощностью прямой и обратной линий связи, согласно альтернативным вариантам осуществления значения РМАХПР, PMINПР, ОСШМАХОБР и ОСШМINОБР,полученные из таблицы перекодировки, можно подавать в контуры управления мощностью прямой и обратной линий связи без какой-либо коррекции с учетом подвижности (или скорости) мобильной станции. Согласно другим альтернативным вариантам осуществления настоящего изобретения значения РМАХПР, PMINПР,ОСШМАХОБР и ОСШМINОБР можно корректировать, исходя только из подвижности или скорости мобильной станции (но не местоположения мобильной станции в ячейке), перед тем как подавать их в контуры управления мощностью прямой и обратной линий связи, сделав значения РМАХПР, PMINПР, ОСШМАХОБР и ОСШМINОБР в таблице перекодировки независимыми от положения (т.е. согласно этим вариантам осуществления значения в таблице перекодировки задают так, чтобы они не изменялись в зависимости от положения мобильной станции в ячейке). На фиг. 2 изображена карта ячейки 200,охватывающей несколько географических зон(R0, R1, R2 и R3), каждой из которых соответствуют те или иные максимальные и минимальные пороги для управления передаваемой мощностью сигналов прямой и обратной линий связи, передаваемых из этих зон на базовую станцию. Согласно этому варианту осуществления пределы для схем управления мощностью прямой и обратной линий связи изменяются скачкообразно при переходе между зонами внутри ячейки. Таким образом, когда мобильная станция работает в зоне R0, на этапе 130 из таблицы перекодировки можно получить первое множество значений РМАХПР, PMINПР, ОСШМАХОБР и ОСШМINОБР, когда мобильная станция работает в зоне R1, из таблицы перекодировки можно получить второе множество значений РМАХПР,PMINПР, ОСШМАХОБР и ОСШМINОБР, и т.д. Специалистам в данной области понятно, что значения РМАХПР, PMINПР, ОСШМАХОБР и ОСШMINОБР могут изменяться более непрерывно или менее регулярно в зависимости от расстояния мобильной станции до центра ячейки. На фиг. 3 изображена блок-схема компонентов иллюстративной мобильной станции 300, работающей в режиме множественного доступа с кодовым разделением каналов (МДКР),используемой для реализации систем управления мощностью, отвечающих настоящему изобретению. Мобильная станция содержит антен 11 ную систему 330, которая через диплексер 332 подключена к аналоговому приемнику 334 и усилителю 336 передаваемой мощности. Антенная система 330 и диплексер 332 стандартной конструкции позволяют одновременно принимать и передавать сигналы с помощью одной и той же антенны. Антенная система 330 может содержать одну антенну для речевого трафика и отдельную антенну для приема сигналов ГСП. Антенная система 330 принимает сигналы, передаваемые на мобильную станцию с одной или нескольких базовых станций и системы ГСП, и выдает сигналы через диплексер 332 на аналоговый приемник 334. Приемник 334 снабжен также аналого-цифровым преобразователем (не показан). Приемник 334 принимает ВЧ-сигналы от диплексера 332, усиливает их и преобразует с понижением частоты, после чего выдает оцифрованный выходной сигнал в приемники 340,342 цифровых данных и в приемник 344 поиска. Очевидно, что, хотя согласно одному варианту осуществления на фиг. 3 показаны только два приемника цифровых данных, мобильная станция низкой производительности может содержать только один приемник цифровых данных,тогда как блоки более высокой производительности будут содержать два или более приемников цифровых данных, что позволяет осуществлять прием с разнесением. Выходные сигналы приемников 340 и 342 поступают на схему 348 объединения разнесенных сигналов, которая осуществляет корректировку по времени двух потоков данных, поступающих от приемников 340 и 342, суммирует потоки и декодирует результат. Подробности, касающиеся работы приемников 340, 342 цифровых данных, приемника 344 поиска и схемы 348 объединения и декодирования разнесенных сигналов, описаны в патенте США 5,101,501 на Способ и устройство гибкой передачи обслуживания при осуществлении связи в сотовой телефонной системе МДКР, переуступленном правопреемнику настоящего изобретения и включенном в настоящее описание посредством ссылки. Выходной сигнал декодера 348 поступает на управляющий процессор 346. Выходной сигнал декодера содержит, например, любые пилот-сигналы базовых станций, которые можно использовать для измерений положения, сигналы синхронизации, принимаемые от системы ГСП, и прочую информацию, например моделирующую информацию и информацию положения базовой станции, передаваемую с базовой станции на мобильный блок. На основании этой информации управляющий процессор 346 определяет параметры управления мощностью прямой и/или обратной линии связи способом,представленным на фиг. 1, и блок управления мощностью, входящий в состав мобильной станции, использует параметры управления мощностью обратной линии связи для управления уровнем мощности сигналов обратной ли 002893 12 нии связи, исходящей от мобильной станции. Все этапы, показанные на фиг. 1, предпочтительно реализовывать программными средствами на управляющем процессоре 346; однако,специалистам в данной области очевидно, что многие из этих этапов могут, альтернативно,быть реализованы в системной инфраструктуре. На фиг. 4 изображена блок-схема компонентов иллюстративной базовой станции 400 МДКР, используемой для реализации систем управления мощностью прямой и обратной линий связи, отвечающих настоящему изобретению. В базовой станции применяются две приемные системы, каждая из которых имеет отдельную антенну и аналоговый приемник для приема с разнесением. Обе приемные системы осуществляют одинаковую обработку сигналов,после чего сигналы подвергаются процессу объединения разнесенных сигналов. Элементы, ограниченные пунктирной линией, соответствуют элементам, осуществляющим связь между базовой станцией и одной мобильной станцией. Согласно фиг. 4 первая приемная система содержит антенну 460, аналоговый приемник 462,приемник 464 поиска и приемники 466 и 468 цифровых данных. Вторая приемная система содержит антенну 470, аналоговый приемник 472, приемник 474 поиска и приемник цифровых данных 476. Управляющий процессор 478 базовой станции используется для обработки сигналов и управления. Помимо прочего процессор 478 базовой станции отслеживает сигналы, передаваемые на мобильную станцию и принимаемые от нее, чтобы определять информацию о положении, используемую согласно настоящему изобретению, и этот процессор также предпочтительно использовать для осуществления моделирования скорости мобильной станции на этапе 120. Процессор 478 базовой станции может определять параметры управления мощностью прямой и/или обратной линии связи способом, представленным на фиг. 1, и блок управления мощностью, входящий в состав базовой станции, использует параметры управления мощностью прямой линии связи для управления уровнем мощности сигналов прямой линии связи, исходящей от базовой станции. Обе приемные системы подключены к схеме 480 объединения и декодирования разнесенных сигналов. Цифровая линия связи 482 используется для обмена сигналами с контроллером базовых станций или маршрутизатором данных, осуществляемого под управлением управляющего процессора 478. Сигналы, приходящие от антенны 460, поступают на аналоговый приемник 462, который усиливает сигналы,преобразует их по частоте и оцифровывает по аналогии с аналоговым приемником мобильной станции. Выходной сигнал аналогового приемника 462 поступает на приемники 466 и 468 цифровых данных и приемник 464 поиска. Вторая приемная система (т.е. аналоговый прием 13 ник 472, приемник 474 поиска и приемник 476 цифровых данных) обрабатывает принятые сигналы аналогично первой приемной системе. Выходные сигналы приемников 466, 476 цифровых данных поступают на схему 480 объединения и декодирования разнесенных сигналов,которая обрабатывает сигналы согласно алгоритму декодирования. Подробности, касающиеся работы первой и второй приемных систем и объединителя и декодера 480 разнесенных сигналов, описаны в патенте США 5,101,501 на Способ и устройство гибкой передачи обслуживания при осуществлении связи в сотовой телефонной системе МДКР, упомянутом выше. Сигналы, подлежащие передаче на мобильные блоки, поступают на передающий модулятор 484, работающий под управлением процессора 478. Передающий модулятор 484 модулирует данные, подлежащие передаче в соответствующую принимающую мобильную станцию. Хотя настоящее изобретение описано применительно к системам мобильной радиосвязи,где для передачи сигналов между мобильной станцией и базовыми станциями, входящими в систему, используется модуляция МДКР, специалистам в данной области очевидно, что принципы настоящего изобретения применимы к системам мобильной радиосвязи, где для связи между мобильной станцией и базовыми станциями, входящими в систему, используются другие режимы модуляции, например модуляция в режиме множественного доступа с временным разделением каналов. Вышеприведенное описание предпочтительных вариантов осуществления позволяет специалистам в данной области практически использовать настоящее изобретение. Специалисты могут предложить разнообразные модификации вышеописанных вариантов осуществления, исходя из того, что описанные здесь общие принципы можно применять к другим вариантам осуществления без дополнительного изобретательства. Таким образом, настоящее изобретение не ограничивается изложенными здесь способами и устройствами, а охватывает широчайший объем, отвечающий нижеприведенной формуле изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ управления мощностью обратной линии связи между мобильной станцией и,по меньшей мере, одной базовой станцией в системе беспроводной связи МДКР, причем мобильная станция содержит контур управления мощностью обратной линии связи, содержащий этапы, на которых идентифицируют мгновенное положение мобильной станции, идентифицируют мгновенную скорость мобильной станции с использованием информации о мгновенном положении и динамически подстраивают параметры контура управления мощностью обратной 14 линии связи на основании мгновенного положения и/или мгновенной скорости, причем параметры контура управления мощностью включают в себя верхний предел отношения сигналшум (ОСШ), нижний предел ОСШ и размер шага приращения для регулировки мощности. 2. Способ по п.1, отличающийся тем, что на этапе динамической подстройки выбирают верхний предел ОСШ и/или нижний предел ОСШ на основании мгновенного положения и подстраивают выбранные верхний и нижний пределы ОСШ на основании мгновенной скорости. 3. Способ по п.2, отличающийся тем, что упомянутые выбор и подстройку производят с помощью заранее заданных таблиц перекодировки. 4. Способ по п.3, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 5. Способ по п.2, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 6. Способ по п.1, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 7. Способ по п.2, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью дифференциальной ГСП. 8. Способ по п.2, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью наземных базовых станций исключительно или в совокупности с информацией ГСП. 9. Способ по п.2, отличающийся тем, что на этапе динамической подстройки параметров контура управления мощностью дополнительно используют мгновенную скорость для переопределения шага приращения для регулировки мощности. 10. Способ по п.9, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации. 11. Способ по п.10, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную 15 скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки. 12. Способ по п.1, отличающийся тем, что на этапе подстройки параметров контура управления мощностью используют мгновенную скорость для переопределения шага приращения для регулировки мощности. 13. Способ по п.12, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации. 14. Способ по п.13, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки. 15. Способ по п.14, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 16. Способ управления мощностью прямой линии связи между базовой станцией и, по меньшей мере, одной мобильной станцией в системе беспроводной связи МДКР, причем базовая станция содержит схему управления мощностью прямой линии связи, содержащий этапы,на которых идентифицируют мгновенное положение мобильной станции, идентифицируют мгновенную скорость мобильной станции с использованием информации о мгновенном положении и динамически подстраивают параметры контура управления мощностью прямой линии связи на основании мгновенного положения и/или мгновенной скорости, причем параметры схемы управления мощностью включают в себя верхний предел уровня мощности, нижний предел уровня мощности и размер шага приращения для регулировки мощности. 17. Способ по п.16, отличающийся тем, что на этапе динамической подстройки выбирают верхний предел уровня мощности и/или нижний предел уровня мощности на основании мгновенногоположения и подстраивают выбранные верхний и нижний пределы уровня мощности на основании мгновенной скорости. 18. Способ по п.17, отличающийся тем, что упомянутые выбор и подстройку производят с помощью заранее заданных таблиц перекодировки. 16 19. Способ по п.18, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 20. Способ по п.17, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 21. Способ по п.16, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция. 22. Способ по п.17, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью дифференциальной ГСП. 23. Способ по п.17, отличающийся тем, что идентификацию мгновенного положения осуществляют с помощью наземных базовых станций исключительно или в совокупности с информацией ГСП. 24. Способ по п.17, отличающийся тем, что на этапе динамической подстройки параметров контура управления мощностью дополнительно используют мгновенную скорость для переопределения шага приращения для регулировки мощности. 25. Способ по п.24, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации. 26. Способ по п.25, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки. 27. Способ по п.16, отличающийся тем, что на этапе динамической подстройки параметров контура управления мощностью используют мгновенную скорость для переопределения шага приращения для регулировки мощности. 28. Способ по п.27, отличающийся тем, что этап идентификации мгновенной скорости осуществляют путем моделирования с использованием мгновенного положения и предыдущих результатов измерения положения и/или картографической информации, и/или фильтрации. 29. Способ по п.28, отличающийся тем, что при переопределении шага приращения для регулировки мощности идентифицируют диапазон скоростей, включающий в себя мгновенную скорость, и определяют соответствующий шаг приращения для регулировки мощности в соответствии с идентифицированным диапазоном с использованием заранее заданной таблицы перекодировки. 18 30. Способ по п.29, отличающийся тем, что территориальная ячейка содержит совокупность различных зон, обслуживаемых базовой станцией, и на этапе идентификации мгновенного положения идентифицируют зону ячейки, в которой в данный момент находится мобильная станция.
МПК / Метки
МПК: H04B 7/005
Метки: подвижности, обратной, управление, мощностью, прямой, информации, линии, связи, положении, использованием
Код ссылки
<a href="https://eas.patents.su/10-2893-upravlenie-moshhnostyu-pryamojj-i-obratnojj-linii-svyazi-s-ispolzovaniem-informacii-o-polozhenii-i-podvizhnosti.html" rel="bookmark" title="База патентов Евразийского Союза">Управление мощностью прямой и обратной линии связи с использованием информации о положении и подвижности</a>
Система мобильной связи для радиокоммуникационной системы с разнесенным приемом заданных сигналов, переданных по линии связи “земля – искусственный спутник земли”.
Номер патента: 972
Опубликовано: 28.08.2000
Авторы: Стасик Эрик, Молнар Барбара Дэвис, Хассан Амер Ареф
МПК: H04B 11/00
Метки: земли, переданных, мобильной, система, приемом, разнесенным, радиокоммуникационной, связи, линии, искусственный, заданных, сигналов, спутник, земля, системы
Формула / Реферат:
1. Система мобильной связи (10) для радиокоммуникационной системы с разнесенным приемом заданных сигналов, переданных по линии связи "Земля - искусственный спутник Земли" (ИСЗ), содержащая: a) первый комплект системы мобильной связи (16) для приема сигналов по линии мобильной связи Земля-ИСЗ, включая сигналы зоны один, передаваемые по линии мобильной связи Земля-ИСЗ от мобильных станций (26), размещенных в первой зоне (24а) зоны обслуживания...
Способ установления прямой зашифрованной связи между двумя терминалами сети радиосвязи с подвижными абонентами и устройства станции и терминал
Номер патента: 1187
Опубликовано: 25.12.2000
Авторы: Флор Эрик, Тотаро Антуан
МПК: H04B 7/26
Метки: прямой, способ, радиосвязи, двумя, установления, терминалами, сети, зашифрованной, абонентами, станции, устройства, подвижными, связи, терминал, между
Формула / Реферат:
1. Способ установления прямой зашифрованной связи, такой как прямая обычная связь между двумя терминалами сети мобильной радиосвязи через спутник(и) и/или типа GSM/DCS после установления вызова одним из них через стационарную станцию мобильной радиосвязи, отличающийся тем, что в течение первой фазы шифрования, которую осуществляют обычным способом после опознавания вызывающего абонента по подписанному ответу (SRES), обеспеченного индивидуальной...
Устройство для индикации изменений в сопротивлении живого тела, схема обратной связи и управления для использования в устройстве, способ поддержания постоянной амплитудной характеристики
Номер патента: 1124
Опубликовано: 30.10.2000
Авторы: Ставропоулос Джеймс, Стиннетт Ричард, Маккормик Джон, Хаббард Лафайетт Рональд
МПК: A61B 5/053
Метки: изменений, устройстве, амплитудной, способ, характеристики, индикации, устройство, связи, схема, управления, постоянной, обратной, использования, тела, живого, сопротивлении, поддержания
Формула / Реферат:
1. Устройство для индикации изменений в сопротивлении живого тела, содержащее схему измерения сопротивления, имеющую внешние выводы, схему усиления, подключенную к схеме измерения сопротивления, и индикаторную схему, подключенную к схеме усиления, и схему регулировки чувствительности, подключенную к указанной схеме усиления, отличающееся тем, что схема измерения сопротивления выполнена с возможностью измерения сопротивлений в первом диапазоне...
Способ и устройство для генерации команд управления мощностью
Номер патента: 1865
Опубликовано: 22.10.2001
Автор: Сейнтс Кит В.
МПК: H04B 7/00
Метки: генерации, мощностью, управления, устройство, команд, способ
Формула / Реферат:
1. Способ генерации команд управления мощностью в системе управления мощностью по замкнутой петле в системе связи МДКР, при котором осуществляют измерение величины энергии внутри полосы, измеряют энергию контрольного канала, для получения величины энергии, не вызывающей помех, пропорционально изменяют указанную энергию контрольного канала в соответствии с величиной доли контрольного сигнала, для получения величины шума, вызванного помехами,...
Управление передаваемой мощности на основе контрольного сигнала
Номер патента: 1633
Опубликовано: 25.06.2001
Авторы: Тидманн Эдвард Г., Вилленеггер Серж, Оденвальдер Джозеф П., Джоу Ю-Чеун
МПК: H04Q 7/20, H04B 7/005
Метки: основе, мощности, сигнала, управление, контрольного, передаваемой
Формула / Реферат:
1. Способ выполнения управления передаваемой мощности сигнала обратной линии связи, обрабатываемого с использованием методики многостанционного доступа с кодовым разделением каналов и передаваемого с мощностью обратной линии связи, в котором сигнал обратной линии связи имеет канал трафика, передаваемый с мощностью передачи канала трафика, и контрольный канал, передаваемый с мощностью передачи контрольного канала, содержащий стадии, на которых...
Предыдущий патент: Система фотодетекторов и способ управления ею
Следующий патент: Система передачи данных из скважины с использованием модуляции импеданса (варианты), способ и устройство для передачи
Случайный патент: Молекулярно - ситовая каталитическая композиция, её получение и применение в процессах конверсии