Устройство для индикации изменений в сопротивлении живого тела, схема обратной связи и управления для использования в устройстве, способ поддержания постоянной амплитудной характеристики
Номер патента: 1124
Опубликовано: 30.10.2000
Авторы: Стиннетт Ричард, Хаббард Лафайетт Рональд, Маккормик Джон, Ставропоулос Джеймс

Формула / Реферат
1. Устройство для индикации изменений в сопротивлении живого тела, содержащее схему измерения сопротивления, имеющую внешние выводы, схему усиления, подключенную к схеме измерения сопротивления, и индикаторную схему, подключенную к схеме усиления, и схему регулировки чувствительности, подключенную к указанной схеме усиления, отличающееся тем, что
схема измерения сопротивления выполнена с возможностью измерения сопротивлений в первом диапазоне относительно низких переменных сопротивлений, измерения сопротивлений во втором диапазоне относительно высоких переменных сопротивлений на живом теле и для получения измеряемого сигнала,
схема усиления выполнена с возможностью усиления измеряемого сигнала до воспринимаемого уровня,
индикаторная схема выполнена с возможностью получения измеряемого сигнала в воспринимаемом виде, и
схема регулировки чувствительности выполнена с возможностью автоматического увеличения чувствительности указанной индикаторной схемы для установки на высокое переменное сопротивление в указанном втором диапазоне, измеряемом в указанной схеме измерения сопротивления, и
указанная схема регулировки чувствительности выполнена с возможностью автоматической регулировки чувствительности указанной индикаторной схемы для низкого переменного сопротивления в указанном втором диапазоне, измеряемом в указанной схеме измерения сопротивления.
2. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема регулировки чувствительности включает в себя схему управления.
3. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема регулировки чувствительности включает в себя спаренный потенциометр.
4. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема регулировки чувствительности включает в себя управляемый напряжением операционный усилитель.
5. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема усиления включает в себя схему калибровки для автоматической регулировки коэффициента усиления указанной схемы усиления при срабатывании на перемещение указанного потенциометра регулировки.
6. Устройство для индикации изменений в сопротивлении живого тела по п.5, отличающееся тем, что указанная схема калибровки включает в себя
схему обратной связи, подключенную с возможностью реагирования к указанной схеме измерения сопротивления для приема сигнала, характеризующего измеряемый входной сигнал, схему управления, подключенную с возможностью реагирования к указанной схеме обратной связи для определения значения компенсации с помощью указанного измеряемого входного сигнала, и
схему компенсации, реагирующую на указанную схему управления и предназначенную для регулировки коэффициента усиления указанной схемы усиления посредством указанного значения компенсации для поддержания, в основном, постоянной амплитудной характеристики.
7. Устройство для измерения и индикации изменений в сопротивлении живого тела по п.5, отличающееся тем, что указанная схема калибровки включает в себя схему обратной связи для приема сигналов, характеризующих общее сопротивление живого тела.
8. Устройство для измерения и индикации изменений в сопротивлении живого тела по п.7, отличающееся тем, что указанная схема калибровки включает в себя схему управления, подключенную к указанной схеме обратной связи для определения из указанного входного сигнала сигнала компенсации, соответствующего изменению в коэффициенте усиления схемы усиления.
9. Устройство для измерения и индикации изменений в сопротивлении живого тела по п.7, отличающееся тем, что указанная схема калибровки включает в себя схему компенсации при приеме, предназначенную для приема указанного сигнала компенсации и для регулировки указанной схемы усиления, чтобы поддерживать, в основном, постоянную амплитудную характеристику.
10. Схема обратной связи и управления для использования в устройстве для индикации изменений в сопротивлении живого тела, содержащая
схему обратной связи, оперативно подключенную к указанному устройству для контролирования известного состояния,
схему управления, подключенную с возможностью реагирования к указанной схеме обратной связи для приема сигналов, характеризующих указанное известное состояние, и для выведения из указанных сигналов соответствующего корректирующего реагирования,
схему компенсации, подключенную с возможностью реагирования к указанной схеме управления, для регулировки сообразно с указанным известным состоянием.
11. Схема обратной связи и управления по п.10, отличающаяся тем, что включает в себя программное средство в указанной схеме управления, причем программное средство включает в себя
средство для считывания сигналов указанного известного состояния из указанной схемы обратной связи,
средство для предвидения и определения реагирования на нежелательную характеристику с помощью сигналов, характеризующих указанное известное состояние,
средство для генерирования отклика на указанную нежелательную характеристику, и
средство для регулировки указанной схемы компенсации для устранения указанной нежелательной характеристики.
12. Схема обратной связи и управления по п.11, отличающаяся тем, что указанное средство предвидения и определения имеет режим ожидания.
13. Схема обратной связи и управления по п.11, отличающаяся тем, что указанное средство предвидения и определения включает в себя средство стабильности восприятия в указанном известном условии.
14. Схема обратной связи и управления по п.11, отличающаяся тем, что указанная схема управления включает в себя аналогo-цифровой преобразователь и указанное средство предвидения и определения включает в себя считывание данных, генерируемых от указанного аналого-цифрового преобразователя.
15. Устройство для индикации изменений в сопротивлении живого тела, содержащее
схему измерения сопротивления, имеющую выходящие из нее выводы,
схему усиления, имеющую выходящие из нее выводы,
индикаторную схему, имеющую выходящие из нее выводы,
совокупность управляемых в ручном режиме устройств, имеющих выходящие из них выводы,
причем, по меньшей мере, один вывод выходит из каждой из указанных схем и из каждого из указанных управляемых в ручном режиме приборов, и отличающееся тем, что включает в себя, по меньшей мере, одну катушку индуктивности в указанной схеме измерения сопротивления и в указанной схеме усиления, в результате чего уменьшают радиопомеху, наводимую посредством указанных схем.
16. Устройство для индикации изменений в сопротивлении живого тела, содержащее схему измерения сопротивления, схему усиления, индикаторную схему и отличающееся тем, что включает в себя корпус, заключающий в себе указанную схему измерения сопротивления, указанную схему усиления и указанную индикаторную схему и слой краски на указанном корпусе, защищающий от радиопомехи.
17. Способ поддержания, в основном, постоянной амплитудной характеристики при реагировании на заранее определенный измеряемый входной сигнал в устройстве для измерения изменений в сопротивлении живого тела, при этом указанное устройство имеет схему измерения сопротивления, отличающийся тем, что осуществляют инициализацию указанной схемы измерения сопротивления и указанной схемы усиления, подключают живое тело к указанной схеме измерения сопротивления, определяют общее сопротивление в живом теле и регулируют коэффициент усиления указанной схемы усиления в соответствии с заранее определенным отношением, в результате чего для измеряемого изменения в сопротивлении формируют, в основном, постоянную амплитудную характеристику, подают моделированный измеряемый сигнал через компьютерный интерфейс.
18. Устройство по п.5, отличающееся тем, что схема усиления включает в себя операционный усилитель, имеющий конденсатор, подключенный в схеме между положительным и отрицательным входами в указанный операционный усилитель.
19. Устройство по п.6, отличающееся тем, что схема управления также содержит микроконтроллер для приема сигналов от указанной схемы обратной связи.
20. Устройство по п.6, отличающееся тем, что схема управления также содержит схему активации для активизирования указанной схемы управления при переходе указанного регулируемого в ручном режиме потенциометра.
21. Устройство по п.6, отличающееся тем, что указанное устройство включает в себя микроконтроллер в указанной схеме управления для приема сигналов от указанной схемы обратной связи и программное средство для конфигурирования указанного микроконтроллера и для генерирования сигнала калибровки при реагировании на указанные сигналы.
22. Устройство по п.21, отличающееся тем, что устройство включает в себя схему компенсации, включающую в себя цифровой потенциометр и предназначенную для подачи входного сигнала калибровки в указанную схему усиления.
23. Устройство по п.5, отличающееся тем, что указанное устройство содержит микроконтроллер в указанной схеме калибровки и программное средство для конфигурирования указанной схемы калибровки для непрерывного обнаружения изменений в регулируемом в ручном режиме потенциометре и для определения и установки режима разрешающей способности из числа совокупности заранее определенных режимов разрешающей способности.
24. Способ по п.17, отличающийся тем, что осуществляют регулирование в ручном режиме потенциометра как части определения общего сопротивления и установку режима разрешающей способности для определения общего сопротивления живого тела на один режим из числа совокупности заранее определенных режимов разрешающей способности.
25. Способ по п.24, отличающийся тем, что осуществляют также регулирование коэффициента усиления указанной схемы усиления посредством согласования заранее определенных сигналов коэффициента компенсации до заранее определенных значений изменения сопротивления, соответствующих изменениям в общем сопротивлении живого тела.
Текст
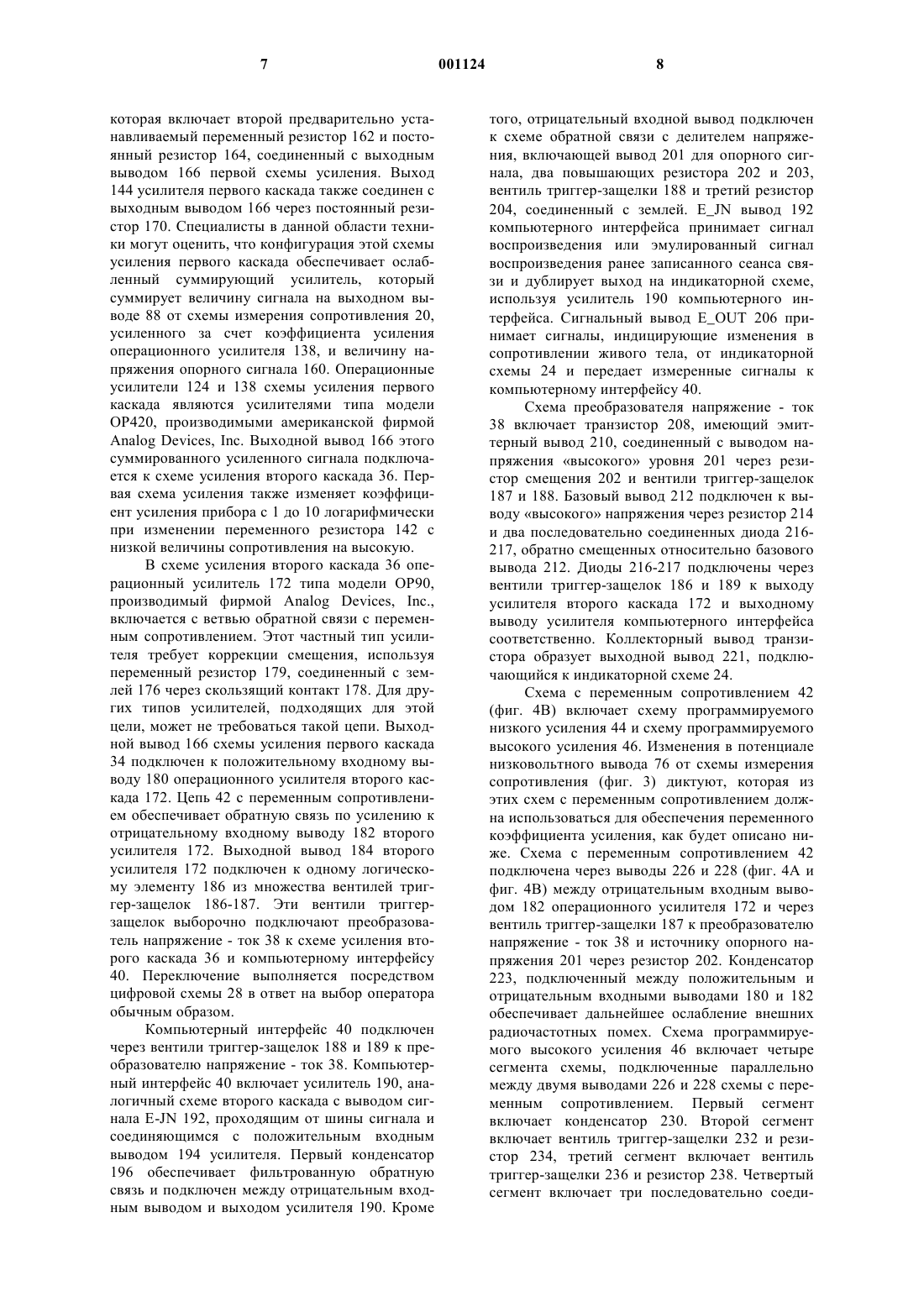
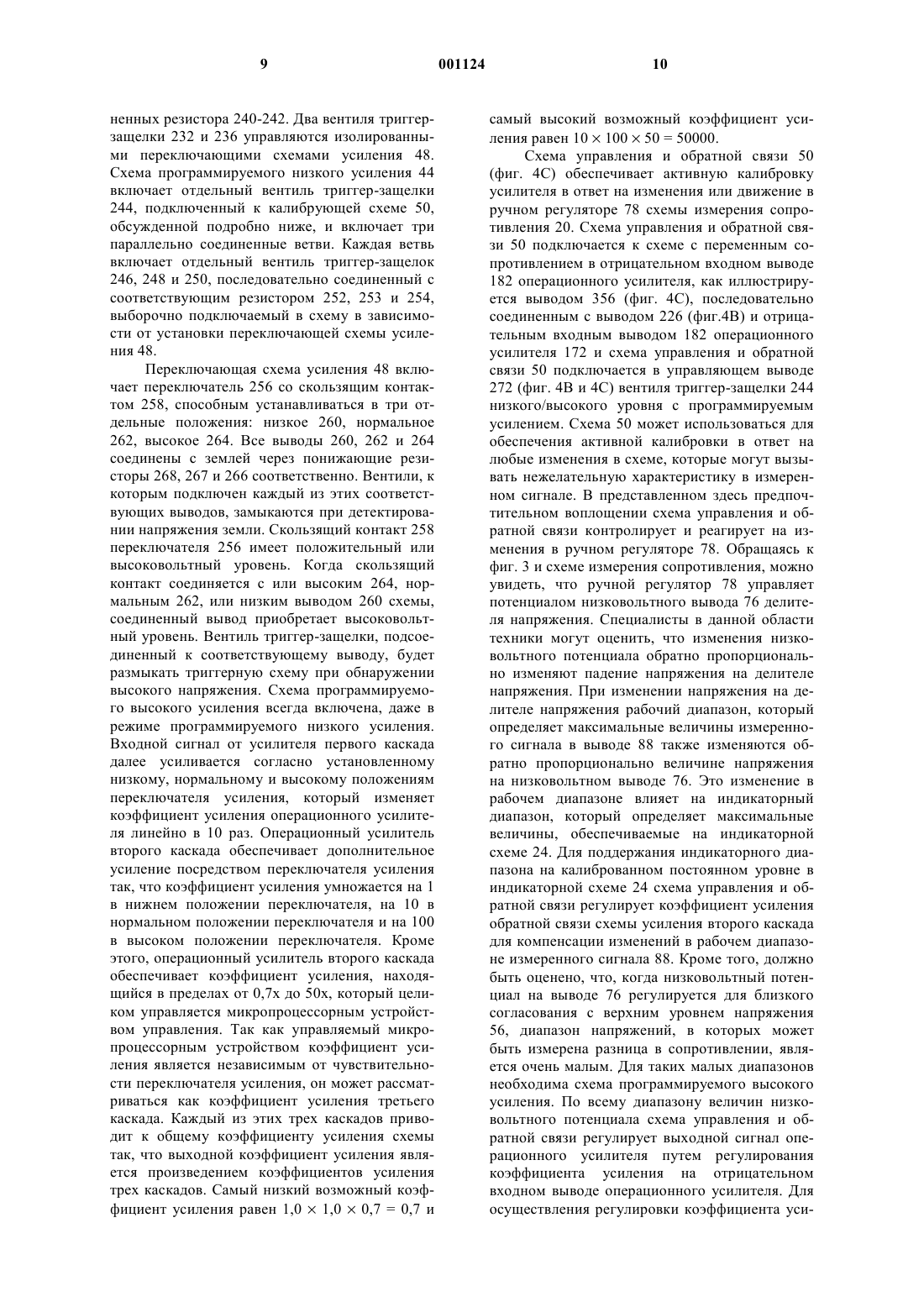
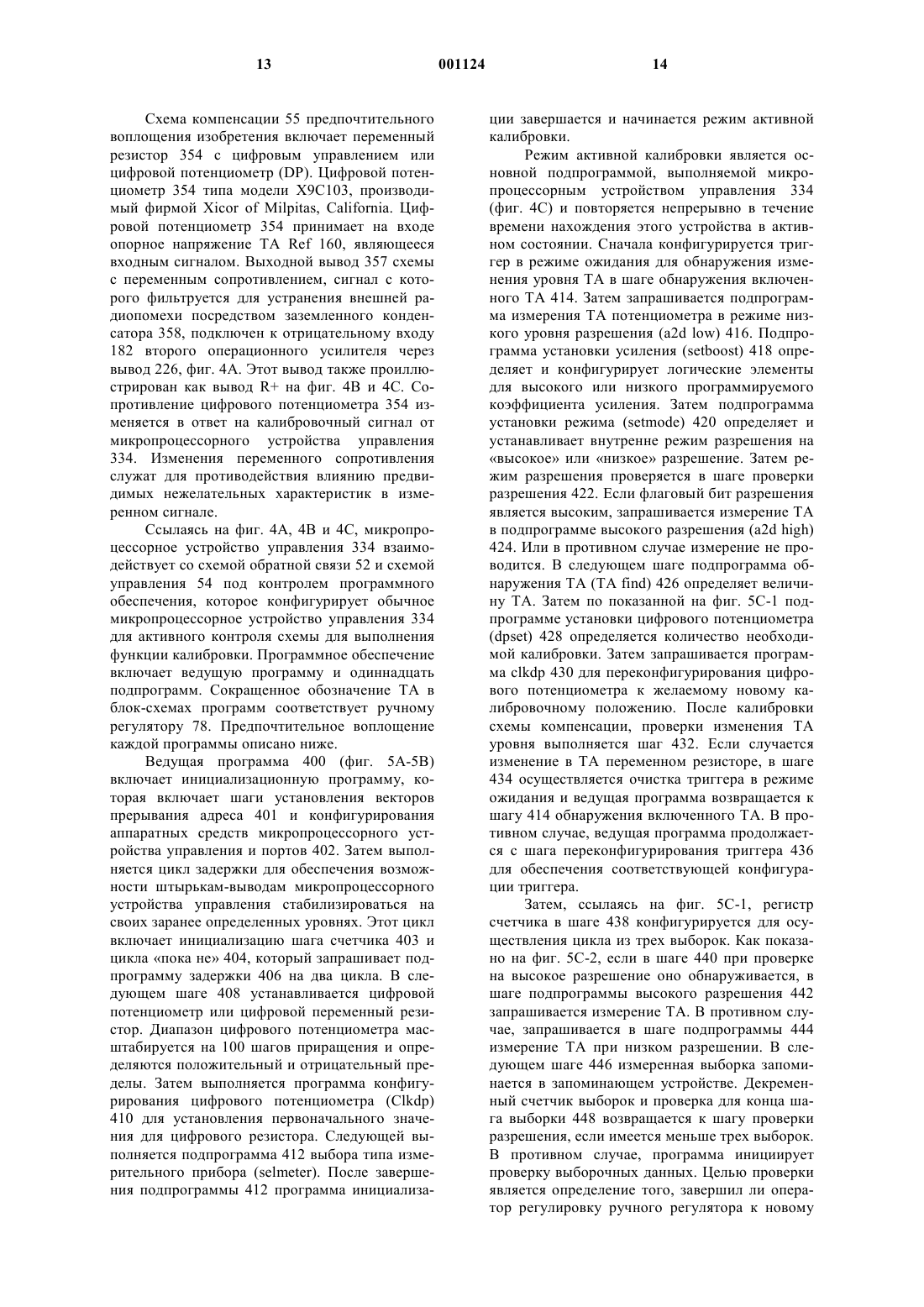
1 Область техники, к которой относится изобретение Это изобретение относится к усовершенствованному устройству для индикации измерения изменений в сопротивлении живого тела. Уровень техники С появлением устройства Хаббарда для измерения и индикации изменений в живом теле стала доступной способность различения малых изменений в сопротивлении живого тела путем проведения электромеханического измерения. Это устройство обычно включает схему измерения сопротивления, схему усиления и индикаторную схему. Хотя являясь адекватно подходящим для достижения предназначенной цели обнаружения изменений в сопротивлении живого тела, оно оказалось неспособным точно индицировать измеренные изменения. Были сделаны различные усовершенствования в попытке решения этой проблемы, которые описаны и проиллюстрированы в патентах США 3290589 и 4459995. Такие устройства служат для генерирования сигнала, представляющего результаты измерения малых изменений в сопротивлении живого тела. Затем он усиливается с выдачей сигнала, который является различным и пригодным для воспроизведения на индикаторе, воспринимаемом человеком, таком как дисплей. Одним недостатком этих устройств является то, что нежелательные характеристики в сигнале могут маскировать или ошибочно представлять результаты малых измерений. Эти нежелательные характеристики могут быть вызваны внешней радиопомехой и/или внутренними нелинейностями в самом устройстве. Таким образом, существует потребность в устройстве,которое может более точно индицировать изменения в сопротивлении живого тела. Сущность изобретения Общей задачей настоящего изобретения является точная индикация малых изменений в сопротивлении живого тела. Частной задачей настоящего изобретения является устранение нежелательных характеристик в сигнале, представляющем сопротивление живого тела. Особенностью настоящего изобретения является включение активной калибровки для обеспечения практически постоянной амплитудной характеристики для данного измеренного входного сигнала. Преимуществом настоящего изобретения является то, что чувствительность устройства поддерживается на постоянном уровне. В соответствии с задачами, особенностями и преимуществами настоящего изобретения разработано усовершенствованное измеряющее электрическое сопротивление или индикаторное устройство, содержащее схему измерения сопротивления, имеющую входные выводы, подсоединяемые к живому телу для получения сигналов измерения, представляющих сопротивле 001124 2 ние живого тела. Схема усиления принимает сигналы измерения и усиливает их до различимого уровня. Индикаторная схема принимает усиленные сигналы и выдает сигналы измерения в воспринимаемой форме. Настоящее изобретение выгодно включает пассивные и активные устройства, служащие для устранения нежелательных характеристик в сигнале измерения. Одной особенностью настоящего изобретения является активная схема калибровки. Схема калибровки служит для обеспечения практически постоянной амплитудной характеристики для данного сигнала измерения изменения в сопротивлении от схемы измерения сопротивления. В предпочтительном воплощении схемы калибровки часть схемы обратной связи и часть схемы управления совместно контролируют работу устройства и предвидят изменения в амплитудной характеристике в индикаторной схеме. Также предусмотрен компенсатор, служащий для приспособления или калибровки схемы усиления для учета предвидимых изменений амплитуды. Другие задачи и преимущества изобретения станут очевидными из следующего его подробного описания по прилагаемым чертежам. Краткое описание чертежей Фиг. 1 изображает функциональную блоксхему обычного устройства для измерения сопротивления живого тела; фиг. 2 - функциональную блок-схему предлагаемого устройства; фиг. 3 - функциональную блок-схему предпочтительной схемы измерения сопротивления предлагаемого устройства; фиг. 4 А - функциональную блок-схему предпочтительной схемы усиления предлагаемого устройства; фиг. 4 В - функциональную блок-схему схемы с переменным сопротивлением и переключающей схемы усиления; фиг. 4 С - функциональную блок-схему схемы обратной связи и управления; фиг. 5 А-5D - блок-схему ведущей программы; фиг. 6 - блок-схему программы задержки; фиг. 7 - блок-схему программы выбора измерительного прибора; фиг. 8 - блок-схему программы аналогоцифрового преобразования низкого разрешения; фиг. 9 - блок-схему программы аналогоцифрового преобразования высокого разрешения; фиг. 10 - блок-схему программы аналогоцифрового преобразования; фиг. 11 - блок-схему программы прерывания аналого-цифрового преобразования; фиг. 12 - блок-схему программы установки программируемого усиления; фиг. 13 - блок-схему программы установки режима разрешения; 3 фиг. 14 - блок-схему программы обнаружения потенциала низкого напряжения; фиг. 15 - блок-схему программы выбора цифрового значения сопротивления; фиг. 16 - блок-схему программы изменения цифрового значения сопротивления. Промышленная применимость Обращаясь к чертежам, представленным для иллюстрации, настоящее изобретение может быть использовано в сочетании с любыми обычными трехкаскадными схемами для измерения и индикации изменений в сопротивлении живого тела. Обращаясь к фиг. 1, такие устройства обычно используют схему измерения сопротивления 20 для преобразования измеренных сопротивлений на живом теле в сигнал измерения. Схема измерения сопротивления подключена к схеме усиления 22, которая усиливает измеренный сигнал до различимого уровня. Индикаторная схема 24, подключенная к схеме усиления 22, выдает измеренный сигнал в воспринимаемом виде. Схема измерения сопротивления 20 может выполнять такие измерения,используя мостовую схему или схему делителя напряжения типа, обычно используемого для измерения сопротивления живого тела. Трехкаскадная схема, включающая мостовую схему типа, пригодного для этой цели, описана в патентах США 4702259, 4459995 и 3290589,каждый из которых включен в это описание для ссылки. Трехкаскадная схема, включающая схему делителя напряжения типа, пригодного для этой цели, входит в состав устройстваHubbard Professional Mark SUPER VII, производителем и продавцом которого является фирма Hubbard Electrometer Manufacturing ofLos Angeles, Ca. На основании вышеупомянутых известных комбинаций было понято, что в схеме требуется средство для автоматического увеличения чувствительности для высоких уровней сопротивления и автоматической регулировки для низких уровней сопротивления. Это усовершенствование обеспечивает постоянную амплитудную характеристику индикаторной схемы 24. Наилучший способ осуществления изобретения Предпочтительное воплощение изобретения, проиллюстрированное в виде функциональной блок-схемы на фиг. 2, включает патентоспособные признаки внутри обычной схемыSuper VII. Такая схема дополнительно использует регулятор напряжения 26 для установления стабильных уровней напряжения постоянного тока во всей электрической схеме. Цифровая схема 28, управляемая микропроцессором(эти обычные компоненты не показаны), используется для отслеживания сигналов, обеспечиваемых на выводах 31 схемы измерения сопротивления 20, поддержания дисплея, воспроизводящего дату и время, и поддержания различных обычных переключающих функций. 4 Выводы дисплея 32 обеспечивают сигналы для обычных часов с табло на жидких кристаллах и сигнал, следящий за дисплеями, размещенными в индикаторной схеме 24. Цифровая схема может быть типа, описанного в патенте США 4702259. Другие выводы 33 простираются от схемы регулятора напряжения 26, схемы измерения сопротивления 20 и схемы усиления 30 и подключаются обычно к различным обычным ручным регуляторам (не показаны). Эти выводы могут перехватывать радиосигналы, тем самым вызывая внешнюю радиопомеху. В предпочтительном воплощении настоящего изобретения монтажная плата включает катушки индуктивности 35, простирающиеся от выводов 37 скользящего контакта (движка) ручных регуляторов. Такие ручные регуляторы могут включать переключатель функций, низковольтный потенциометр, низковольтный потенциометр дистанционного управления, подстроечный переменный резистор и регулятор чувствительности. В соответствии с настоящим изобретением схема усиления 30 обычно включает два усилительных каскада. Первая схема усиления 34 служит для приема и логарифмического усиления измеренного сигнала. Вторая схема усиления 36, подключенная к выходу первой схемы усиления 34, служит для удовлетворения нужд заказчика и увеличения коэффициента усиления измеренного сигнала. Компьютерный интерфейс 40 произвольно обеспечивает входной сигнал для схемы преобразователя напряжение ток 38 для применений, где желательно иметь имитированный измеренный сигнал. Схема преобразователя напряжение - ток 38, подключенная к выходу второй схемы усиления, модифицирует измеренный сигнал, приводя его в форму, удобную для индикаторной схемы 24. Схема преобразователя напряжение - ток 38 также обеспечивает обратную связь ко второй схеме усиления и компьютерному интерфейсу 40. Ко второй схеме усиления 36 подключена схема с переменным сопротивлением 42, которая обеспечивает сигнал обратной связи для усиления измеренного сигнала от схемы измерения сопротивления 20. Схема с переменным сопротивлением 42 включает сегменты 46 и 44 высокого и низкого программируемых усилений. Для ручной регулировки усиления к схеме с переменным сопротивлением 42 подключена изолированная переключающая схема усиления. К схеме с переменным сопротивлением 42 также подключена схема калибровки 50. Схема калибровки 50 функционирует в качестве калибровочного средства для регулировки выходного сигнала схемы усиления. В настоящем предпочтительном воплощении схема калибровки 50 включает схему обратной связи 52, схему управления 54 и схему компенсации 55. Схема измерения сопротивления предпочтительного воплощения изобретения (фиг. 3) является схемой типа делителя напряжения. В схеме делителя напряжения высоковольтный вывод 56 последовательно соединен с первым делящим напряжение резистором 58. В первом сопротивлении может использоваться переменный резистор 60 для подстройки или смещения величины первого сопротивления. Обычный переключатель проверки измерительного прибора 62 или выбираемый вручную или под управлением цифровой схемы 28 произвольно переключает цепь схемы делителя напряжения между парой, состоящей из внешнего вывода 66 и вывода 64 для подсоединения к живому телу и резистором 68 на 5 КОм, который работает в качестве контрольного сопротивления вместо живого тела. Обычные электроды, предназначенные для присоединения к живому телу, прикрепляются через вилку электрического соединителя (не показана). При физической вставке вилки внешние выводы 64 и 66 предназначены для присоединения к живому телу. Когда вилка удалена, второй переключатель 70 подсоединяет вывод с высоким потенциалом 66 к резистору 68 на 5 КОм. Кроме того, между внешними выводами 64 и 66 последовательно с катушкой индуктивности 86 подключен конденсатор 72. Катушка индуктивности 86 и конденсатор 72 служат для уменьшения помех. Между переключателем проверки измерительного прибора и выходным выводом 88 формируется второе делящее напряжение сопротивление. Третье делящее напряжение сопротивление 74 подключено последовательно между выходным выводом 88 и низковольтным выводом 76. Величина низковольтного потенциала в выводе 76 может регулироваться вручную, используя ручной регулятор 78. Предпочтительно,ручной регулятор 78 включает вывод скользящего контакта 80 от потенциометра 82, подключенногомежду высоковольтным и низковольтным выводами. Цепь вывода скользящего контакта 80 включает катушку индуктивности 87,обычно подключаемую последовательно через аналоговую переключающую схему 90 к выводу 91 и заземленному конденсатору 92 для минимизации помех. Ручной регулятор 78 может обычно быть встроенным потенциометром 82 или внешним потенциометром 94. Внешний потенциометр 94 также подключает параллельно высоковольтный и низковольтный выводы 96 и 98 и вывод скользящего контакта 100 к аналоговой переключающей схеме. Внешний пере менный резистор 94 также включает REM или удаленный вывод сигнала 102 и земляной вывод 104. Аналоговая переключающая схема 90, которая может обычно включать ручной переключатель или делитель напряжения и триггерызащелки, подключена к аналоговому переключателю (не показан), который селективно приводит в действие внутренний или внешний потенциометр. Во втором случае выбор потенциометра осуществляется согласно уровню напря 6 жения на выводе REM сигнала 102. Сигнал поддерживается высоким при использовании внутреннего потенциометра 82 и подсоединяется к земле 104 выводом 106 во внешнем потенциометре. Величины напряжения от скользящего контакта 91, высокая 108 и низкая 100 величины напряжения от используемого потенциометра посылаются к цифровой схеме 28 (фиг. 2) для вычисления показаний сигнала цифрового потенциометра. Сигнал с выходного вывода скользящего контакта 91 посылается через буферную схему 112, содержащую повторитель напряжения, для предотвращения потери тока в низковольтном выводе 76. Ссылаясь на фиг. 4 А, 4 В и 4 С, первая схема усиления 34 принимает измеренный сигнал,обеспеченный выходным выводом 88 схемы измерения сопротивления. Первая схема усиления 34 включает операционный усилитель (ораmр) 124, имеющий положительный вход 126,подключенный к выходному выводу 88 сигнала от схемы измерения сопротивления 20 (фиг. 1). Операционный усилитель 124 конфигурируется в виде повторителя напряжения с выводом обратной связи 128, идущим от выходного вывода 130 операционного усилителя к отрицательному входу 132. Между положительным и отрицательным входами 126 и 132 подключен конденсатор 134 для ослабления внешней радиопомехи в измеренном сигнале. Выходной вывод операционного усилителя 130 параллельно с цепью обратной связи 136 обеспечивает отрицательный вход для операционного усилителя 138,который функционирует в качестве усилителя первого каскада. Последовательно выходному выводу 130 повторителя напряжения подключен резистор 140. Резистор 140 подключен к предварительно установленному потенциометру 142 и выходному выводу 144 усилителя первого каскада через две параллельные резистивные ветви. Первая ветвь включает резистор 146,подключенный между потенциометром 142 и первым резистором 140. Вторая ветвь включает обычный регулируемый пользователем потенциометр, подключаемый на электродах 148, последовательно соединенных с резистором 150 и предварительно устанавливаемым переменным резистором 142. Регулируемый пользователем потенциометр (не показан) функционирует в качестве потенциометрического регулятора чувствительности. Электроды регулятора чувствительности 148 включают вывод скользящего контакта 152, подключенный к отрицательному входному выводу 154 усилителя первого каскада через катушку индуктивности 156. На положительный входной вывод 158 операционного усилителя первого каскада поступает опорный сигнал 160 от регулятора напряжения 26, обеспечивающего стабильный опорный сигнал 5,25 В. Вывод для опорного сигнала 160 также соединен с резистивной ветвью обратной связи, 7 которая включает второй предварительно устанавливаемый переменный резистор 162 и постоянный резистор 164, соединенный с выходным выводом 166 первой схемы усиления. Выход 144 усилителя первого каскада также соединен с выходным выводом 166 через постоянный резистор 170. Специалисты в данной области техники могут оценить, что конфигурация этой схемы усиления первого каскада обеспечивает ослабленный суммирующий усилитель, который суммирует величину сигнала на выходном выводе 88 от схемы измерения сопротивления 20,усиленного за счет коэффициента усиления операционного усилителя 138, и величину напряжения опорного сигнала 160. Операционные усилители 124 и 138 схемы усиления первого каскада являются усилителями типа модели ОР 420, производимыми американской фирмойAnalog Devices, Inc. Выходной вывод 166 этого суммированного усиленного сигнала подключается к схеме усиления второго каскада 36. Первая схема усиления также изменяет коэффициент усиления прибора с 1 до 10 логарифмически при изменении переменного резистора 142 с низкой величины сопротивления на высокую. В схеме усиления второго каскада 36 операционный усилитель 172 типа модели ОР 90,производимый фирмой Analog Devices, Inc.,включается с ветвью обратной связи с переменным сопротивлением. Этот частный тип усилителя требует коррекции смещения, используя переменный резистор 179, соединенный с землей 176 через скользящий контакт 178. Для других типов усилителей, подходящих для этой цели, может не требоваться такой цепи. Выходной вывод 166 схемы усиления первого каскада 34 подключен к положительному входному выводу 180 операционного усилителя второго каскада 172. Цепь 42 с переменным сопротивлением обеспечивает обратную связь по усилению к отрицательному входному выводу 182 второго усилителя 172. Выходной вывод 184 второго усилителя 172 подключен к одному логическому элементу 186 из множества вентилей триггер-защелок 186-187. Эти вентили триггерзащелок выборочно подключают преобразователь напряжение - ток 38 к схеме усиления второго каскада 36 и компьютерному интерфейсу 40. Переключение выполняется посредством цифровой схемы 28 в ответ на выбор оператора обычным образом. Компьютерный интерфейс 40 подключен через вентили триггер-защелок 188 и 189 к преобразователю напряжение - ток 38. Компьютерный интерфейс 40 включает усилитель 190, аналогичный схеме второго каскада с выводом сигнала E-JN 192, проходящим от шины сигнала и соединяющимся с положительным входным выводом 194 усилителя. Первый конденсатор 196 обеспечивает фильтрованную обратную связь и подключен между отрицательным входным выводом и выходом усилителя 190. Кроме 8 того, отрицательный входной вывод подключен к схеме обратной связи с делителем напряжения, включающей вывод 201 для опорного сигнала, два повышающих резистора 202 и 203,вентиль триггер-защелки 188 и третий резистор 204, соединенный с землей. EJN вывод 192 компьютерного интерфейса принимает сигнал воспроизведения или эмулированный сигнал воспроизведения ранее записанного сеанса связи и дублирует выход на индикаторной схеме,используя усилитель 190 компьютерного интерфейса. Сигнальный вывод EOUT 206 принимает сигналы, индицирующие изменения в сопротивлении живого тела, от индикаторной схемы 24 и передает измеренные сигналы к компьютерному интерфейсу 40. Схема преобразователя напряжение - ток 38 включает транзистор 208, имеющий эмиттерный вывод 210, соединенный с выводом напряжения высокого уровня 201 через резистор смещения 202 и вентили триггер-защелок 187 и 188. Базовый вывод 212 подключен к выводу высокого напряжения через резистор 214 и два последовательно соединенных диода 216217, обратно смещенных относительно базового вывода 212. Диоды 216-217 подключены через вентили триггер-защелок 186 и 189 к выходу усилителя второго каскада 172 и выходному выводу усилителя компьютерного интерфейса соответственно. Коллекторный вывод транзистора образует выходной вывод 221, подключающийся к индикаторной схеме 24. Схема с переменным сопротивлением 42(фиг. 4 В) включает схему программируемого низкого усиления 44 и схему программируемого высокого усиления 46. Изменения в потенциале низковольтного вывода 76 от схемы измерения сопротивления (фиг. 3) диктуют, которая из этих схем с переменным сопротивлением должна использоваться для обеспечения переменного коэффициента усиления, как будет описано ниже. Схема с переменным сопротивлением 42 подключена через выводы 226 и 228 (фиг. 4 А и фиг. 4 В) между отрицательным входным выводом 182 операционного усилителя 172 и через вентиль триггер-защелки 187 к преобразователю напряжение - ток 38 и источнику опорного напряжения 201 через резистор 202. Конденсатор 223, подключенный между положительным и отрицательным входными выводами 180 и 182 обеспечивает дальнейшее ослабление внешних радиочастотных помех. Схема программируемого высокого усиления 46 включает четыре сегмента схемы, подключенные параллельно между двумя выводами 226 и 228 схемы с переменным сопротивлением. Первый сегмент включает конденсатор 230. Второй сегмент включает вентиль триггер-защелки 232 и резистор 234, третий сегмент включает вентиль триггер-защелки 236 и резистор 238. Четвертый сегмент включает три последовательно соеди 9 ненных резистора 240-242. Два вентиля триггерзащелки 232 и 236 управляются изолированными переключающими схемами усиления 48. Схема программируемого низкого усиления 44 включает отдельный вентиль триггер-защелки 244, подключенный к калибрующей схеме 50,обсужденной подробно ниже, и включает три параллельно соединенные ветви. Каждая ветвь включает отдельный вентиль триггер-защелок 246, 248 и 250, последовательно соединенный с соответствующим резистором 252, 253 и 254,выборочно подключаемый в схему в зависимости от установки переключающей схемы усиления 48. Переключающая схема усиления 48 включает переключатель 256 со скользящим контактом 258, способным устанавливаться в три отдельные положения: низкое 260, нормальное 262, высокое 264. Все выводы 260, 262 и 264 соединены с землей через понижающие резисторы 268, 267 и 266 соответственно. Вентили, к которым подключен каждый из этих соответствующих выводов, замыкаются при детектировании напряжения земли. Скользящий контакт 258 переключателя 256 имеет положительный или высоковольтный уровень. Когда скользящий контакт соединяется с или высоким 264, нормальным 262, или низким выводом 260 схемы,соединенный вывод приобретает высоковольтный уровень. Вентиль триггер-защелки, подсоединенный к соответствующему выводу, будет размыкать триггерную схему при обнаружении высокого напряжения. Схема программируемого высокого усиления всегда включена, даже в режиме программируемого низкого усиления. Входной сигнал от усилителя первого каскада далее усиливается согласно установленному низкому, нормальному и высокому положениям переключателя усиления, который изменяет коэффициент усиления операционного усилителя линейно в 10 раз. Операционный усилитель второго каскада обеспечивает дополнительное усиление посредством переключателя усиления так, что коэффициент усиления умножается на 1 в нижнем положении переключателя, на 10 в нормальном положении переключателя и на 100 в высоком положении переключателя. Кроме этого, операционный усилитель второго каскада обеспечивает коэффициент усиления, находящийся в пределах от 0,7 х до 50 х, который целиком управляется микропроцессорным устройством управления. Так как управляемый микропроцессорным устройством коэффициент усиления является независимым от чувствительности переключателя усиления, он может рассматриваться как коэффициент усиления третьего каскада. Каждый из этих трех каскадов приводит к общему коэффициенту усиления схемы так, что выходной коэффициент усиления является произведением коэффициентов усиления трех каскадов. Самый низкий возможный коэффициент усиления равен 1,01,00,7 = 0,7 и 10 самый высокий возможный коэффициент усиления равен 1010050 = 50000. Схема управления и обратной связи 50(фиг. 4 С) обеспечивает активную калибровку усилителя в ответ на изменения или движение в ручном регуляторе 78 схемы измерения сопротивления 20. Схема управления и обратной связи 50 подключается к схеме с переменным сопротивлением в отрицательном входном выводе 182 операционного усилителя, как иллюстрируется выводом 356 (фиг. 4 С), последовательно соединенным с выводом 226 (фиг.4 В) и отрицательным входным выводом 182 операционного усилителя 172 и схема управления и обратной связи 50 подключается в управляющем выводе 272 (фиг. 4 В и 4 С) вентиля триггер-защелки 244 низкого/высокого уровня с программируемым усилением. Схема 50 может использоваться для обеспечения активной калибровки в ответ на любые изменения в схеме, которые могут вызывать нежелательную характеристику в измеренном сигнале. В представленном здесь предпочтительном воплощении схема управления и обратной связи контролирует и реагирует на изменения в ручном регуляторе 78. Обращаясь к фиг. 3 и схеме измерения сопротивления, можно увидеть, что ручной регулятор 78 управляет потенциалом низковольтного вывода 76 делителя напряжения. Специалисты в данной области техники могут оценить, что изменения низковольтного потенциала обратно пропорционально изменяют падение напряжения на делителе напряжения. При изменении напряжения на делителе напряжения рабочий диапазон, который определяет максимальные величины измеренного сигнала в выводе 88 также изменяются обратно пропорционально величине напряжения на низковольтном выводе 76. Это изменение в рабочем диапазоне влияет на индикаторный диапазон, который определяет максимальные величины, обеспечиваемые на индикаторной схеме 24. Для поддержания индикаторного диапазона на калиброванном постоянном уровне в индикаторной схеме 24 схема управления и обратной связи регулирует коэффициент усиления обратной связи схемы усиления второго каскада для компенсации изменений в рабочем диапазоне измеренного сигнала 88. Кроме того, должно быть оценено, что, когда низковольтный потенциал на выводе 76 регулируется для близкого согласования с верхним уровнем напряжения 56, диапазон напряжений, в которых может быть измерена разница в сопротивлении, является очень малым. Для таких малых диапазонов необходима схема программируемого высокого усиления. По всему диапазону величин низковольтного потенциала схема управления и обратной связи регулирует выходной сигнал операционного усилителя путем регулирования коэффициента усиления на отрицательном входном выводе операционного усилителя. Для осуществления регулировки коэффициента уси 11 ления на отрицательном входном выводе операционного усилителя и переключения между режимом программируемого высокого усиления и режимом программируемого низкого усиления схема управления и обратной связи включает схему обратной связи 52, схему управления 54 и схему компенсации 55. Схема обратной связи 52 схемы управления и обратной связи включает вывод, подсоединенный к выводу низковольтного потенциала 76, который присоединен через резистор 306 и входному выводу 308 низкого разрешения микропроцессорного устройства управления и включает заземленный конденсатор 310 для фильтрации сигнала. Выход резистора 306 также подключен к положительному входному выводу 312 операционного усилителя 314. Отрицательный вывод 316 операционного усилителя соединен с усилительной цепью, включающей резистивную ветвь обратной связи 318, последовательно соединенную с потенциометром 324,и емкостную ветвь 320, подключенную параллельно между отрицательным входным выводом 316 и выходным выводом 322. Потенциометр 324 балансируется посредством пары постоянных резисторов 326 и 328 и переменного резистора 330 для осуществления желаемого сдвига усиления. К выходу операционного усилителя высокого разрешения 314 через резистор 331 подключен входной вывод высокого разрешения 332. Схема управления 54 включает микропроцессорное устройство управления (MCU) 334 типа модели ST62T10B6/SWD, производимое американской фирмой SGS Thompson Electronics of Carrolton, Texas. В этом частном случае микропроцессорное устройство управления 334 также обычно называемое центральным процессором (CPU) включает первый восьмибитовый порт, конфигурируемый посредством программного обеспечения для приема двух выходных выводов 308 и 332 схемы обратной связи через контактные штырьки 14 и 15 соответственно. Эти штырьки подключаются в схему к внутреннему аналого-цифровому преобразователю, входящему в состав микропроцессорного устройства управления, и который масштабирован для различения дискретных изменений во входном сигнале в диапазоне от 0 до 255 шагов приращения. Вход низкого разрешения изменяется непрерывно при панорамировании ручного регулятора 78 в диапазоне 0,5-6,5, что соответствует диапазону изменения напряжения в пределах приблизительно 1,4-5,2 В. Вход высокого разрешения является активным, но напряжение фактически не изменяется до тех пор, пока ручной регулятор 78 не установлен на величину выше около 4,8 В. Ниже этого уровня вход высокого разрешения остается на величине около 0,7 В (одно приращение падения напряжения выше земли). Диапазон входа высокого разрешения калибруется для достижения величины 1 12 В при достижении ручным регулятором 78 величины 5,0 В и напряжение продолжает увеличиваться линейно до приблизительно 5,2 В при повышении величины ручного регулятора 78 до 6,5 В. Схема управления 54 (фиг. 4 С) также включает триггерную схему активации 336. Схема 54 необходима только в течение периода времени, когда ручной регулятор 78 находится в переходе. Так как эта активность является прерывистой, схема 54 включает энергосберегающий триггер 338 в режиме ожидания. Триггер 338 является триггером с раздельной установкой 1 и 0 типа модели 4013 В, производимым фирмой Motorola. Вывод 340 от цифровой схемы 28 (фиг. 2) запускает вентиль триггерзащелки, обычно установленный на высокое напряжение 341. Когда цифровая схема 28 обнаруживает изменение в низковольтном выходном выводе 91 скользящего контакта (фиг. 3),это вызывает изменение сигнала с высокого на низкий, передаваемый в выводе 340 к индикаторной схеме 24. Этот вывод 340 также подключен к схеме активации 336. Когда уровень сигнала на выводе 340 понижается до потенциала земли или низкого, триггер 338 изменяет выходной сигнал 342 и посылает сигнал прерывания к микропроцессорному устройству управления, который в действительности будит это устройство. Схема управления 54 включает выводы источника питания и земли 344 и 346, подключенные в контактных штырьках 1, 2, 5, 6 и 20 обычным образом. К штырьку 7 микропроцессорного устройства управления подключена схема ликвидации прерывания 348 этого устройства. Переключатель возврата хронирован для того, чтобы вызывать появление на штырьке 7 сигнала восстановления, если бы было резкое снижение напряжения источника питания. Возврат с включением/отключением предполагается осуществлять при прохождении величины напряжения 4,5 В. При повышении напряжения с нуля и приближении его к 4,5 В возврат остается выключенным. При повышении напряжения выше 4,5 В включается возврат и остается включенным, пока уровень напряжения равен 4,5 В или около 4,5 В. Возврат выключается,если уровень напряжения падает ниже 4,5 В и остается выключенным, пока уровень напряжения остается ниже 4,5 В. Часы 350, работающие на частоте 4 МГц, подключаются к штырькам 3 и 4 и являются часами типа модели РХ 400, производимой под торговой маркой Panasonic. Схема управления 54 в ответ на схему обратной связи 52 и под управлением программного обеспечения работает для генерирования калибровочного сигнала. Калибровочный сигнал посылается через вывод 356 и штырьки 18 и 19 микропроцессорного устройства управления к схеме компенсации 55. 13 Схема компенсации 55 предпочтительного воплощения изобретения включает переменный резистор 354 с цифровым управлением или цифровой потенциометр (DP). Цифровой потенциометр 354 типа модели Х 9 С 103, производимый фирмой Xicor of Milpitas, California. Цифровой потенциометр 354 принимает на входе опорное напряжение ТА Ref 160, являющееся входным сигналом. Выходной вывод 357 схемы с переменным сопротивлением, сигнал с которого фильтруется для устранения внешней радиопомехи посредством заземленного конденсатора 358, подключен к отрицательному входу 182 второго операционного усилителя через вывод 226, фиг. 4 А. Этот вывод также проиллюстрирован как вывод R+ на фиг. 4 В и 4 С. Сопротивление цифрового потенциометра 354 изменяется в ответ на калибровочный сигнал от микропроцессорного устройства управления 334. Изменения переменного сопротивления служат для противодействия влиянию предвидимых нежелательных характеристик в измеренном сигнале. Ссылаясь на фиг. 4 А, 4 В и 4 С, микропроцессорное устройство управления 334 взаимодействует со схемой обратной связи 52 и схемой управления 54 под контролем программного обеспечения, которое конфигурирует обычное микропроцессорное устройство управления 334 для активного контроля схемы для выполнения функции калибровки. Программное обеспечение включает ведущую программу и одиннадцать подпрограмм. Сокращенное обозначение ТА в блок-схемах программ соответствует ручному регулятору 78. Предпочтительное воплощение каждой программы описано ниже. Ведущая программа 400 (фиг. 5 А-5 В) включает инициализационную программу, которая включает шаги установления векторов прерывания адреса 401 и конфигурирования аппаратных средств микропроцессорного устройства управления и портов 402. Затем выполняется цикл задержки для обеспечения возможности штырькам-выводам микропроцессорного устройства управления стабилизироваться на своих заранее определенных уровнях. Этот цикл включает инициализацию шага счетчика 403 и цикла пока не 404, который запрашивает подпрограмму задержки 406 на два цикла. В следующем шаге 408 устанавливается цифровой потенциометр или цифровой переменный резистор. Диапазон цифрового потенциометра масштабируется на 100 шагов приращения и определяются положительный и отрицательный пределы. Затем выполняется программа конфигурирования цифрового потенциометра (Clkdp) 410 для установления первоначального значения для цифрового резистора. Следующей выполняется подпрограмма 412 выбора типа измерительного прибора (selmeter). После завершения подпрограммы 412 программа инициализа 001124 14 ции завершается и начинается режим активной калибровки. Режим активной калибровки является основной подпрограммой, выполняемой микропроцессорным устройством управления 334(фиг. 4 С) и повторяется непрерывно в течение времени нахождения этого устройства в активном состоянии. Сначала конфигурируется триггер в режиме ожидания для обнаружения изменения уровня ТА в шаге обнаружения включенного ТА 414. Затем запрашивается подпрограмма измерения ТА потенциометра в режиме низкого уровня разрешения (a2d low) 416. Подпрограмма установки усиления (setboost) 418 определяет и конфигурирует логические элементы для высокого или низкого программируемого коэффициента усиления. Затем подпрограмма установки режима (setmode) 420 определяет и устанавливает внутренне режим разрешения на высокое или низкое разрешение. Затем режим разрешения проверяется в шаге проверки разрешения 422. Если флаговый бит разрешения является высоким, запрашивается измерение ТА в подпрограмме высокого разрешения (a2d high) 424. Или в противном случае измерение не проводится. В следующем шаге подпрограмма обнаружения ТА (ТА find) 426 определяет величину ТА. Затем по показанной на фиг. 5 С-1 подпрограмме установки цифрового потенциометра(dpset) 428 определяется количество необходимой калибровки. Затем запрашивается программа clkdp 430 для переконфигурирования цифрового потенциометра к желаемому новому калибровочному положению. После калибровки схемы компенсации, проверки изменения ТА уровня выполняется шаг 432. Если случается изменение в ТА переменном резисторе, в шаге 434 осуществляется очистка триггера в режиме ожидания и ведущая программа возвращается к шагу 414 обнаружения включенного ТА. В противном случае, ведущая программа продолжается с шага переконфигурирования триггера 436 для обеспечения соответствующей конфигурации триггера. Затем, ссылаясь на фиг. 5 С-1, регистр счетчика в шаге 438 конфигурируется для осуществления цикла из трех выборок. Как показано на фиг. 5 С-2, если в шаге 440 при проверке на высокое разрешение оно обнаруживается, в шаге подпрограммы высокого разрешения 442 запрашивается измерение ТА. В противном случае, запрашивается в шаге подпрограммы 444 измерение ТА при низком разрешении. В следующем шаге 446 измеренная выборка запоминается в запоминающем устройстве. Декременный счетчик выборок и проверка для конца шага выборки 448 возвращается к шагу проверки разрешения, если имеется меньше трех выборок. В противном случае, программа инициирует проверку выборочных данных. Целью проверки является определение того, завершил ли оператор регулировку ручного регулятора к новому 15 положению. Микропроцессорное устройство управления распознает, что оператор завершил поворот регулятора и измерение теперь является стабильным, когда любые две из трех выборок данных являются равными. В то время как могут выполняться другие шаги и другие выборки данных для определения того, завершил ли оператор регулировку ручного регулятора, предпочтительное воплощение включает три шага состояния данных 450 (фиг. 5C-2), 452 (фиг. 5D1) и 454 (фиг. 5D-1). В первом проверочном шаге 450 первая выборка данных сравнивается со второй выборкой данных. Если первая и вторая выборки данных являются равными, проверка прекращается и программа продолжается к шагу проверки ТА статуса 456 (фиг 5D-1). В противном случае, проверка продолжается со второго шага проверки 452, в котором сравнивается первая выборка данных с третьей выборкой данных. При равенстве первой и третьей выборок данных проверка прекращается и программа продолжается к шагу проверки ТА статуса 456. Или же проверка продолжается с помощью третьего шага проверки 454, в котором сравниваются вторая и третья выборки данных. При равенстве второй и третьей выборок данных программа продолжается к шагу проверки статуса ТА 456. В противном случае, ТА еще регулируется, и программа возвращается к началу программы калибровки в шаге обнаружения включенного ТА 414. (фиг. 5 В). Если любые из выборок данных являются равными, что указывает на то, что ручная регулировка завершена и имеются достоверные данные, выполняется шаг проверки статуса ТА 456 для определения того, двигался ли ручкой регулятор с момента выборки посредством проверки ТА триггера. Если триггер был запущен, он очищается и происходит возврат к шагу 458(фиг. 5D-1) и программа возвращается к шагу обнаружения включенного ТА. Или же схема компенсации калибруется снова в перечисленной последовательности: a 2d low подпрограмма 416 (фиг. 5 В), setboost подпрограмма 460 (фиг. 5D-1), tafind подпрограмма 462 (фиг. 5D-1),dpset подпрограмма 464 (фиг. 5D-2) и clkdp подпрограмма 466 (фиг. 5D-2). Затем снова проверяется ТА триггер на движение в шаге 468(фиг. 5D-2). Если имелось движение, ТА триггер очищается 470 и программа возвращается к шагу обнаружения включенного ТА 414. В противном случае, программа входит в режим ожидания в шаге 472 для сохранения энергии и предотвращения шума. Активная часть аппаратных средств микропроцессорного устройства управления контролирует входной сигнал от ТА триггера. Если принимается сигнал прерывания,микропроцессорное устройство управления будится в шаге 474 и возвращается к проверке для шага движения ТА 468. Таким образом, ведущая программа поддерживает калибровку схемы усиления. 16 Была обнаружена полезность режима ожидания, так как в противном случае микропроцессорное устройство управления 334 осуществляло бы непрерывную калибровку схемы усиления. Это привело бы к периодическим скачкам в выходном сигнале индикаторной схемы,которые были бы не связаны со схемой измерения сопротивления. Режим ожидания устранил случайные скачки и стабилизировал схему компенсации путем приведения в бездействующее состояние схемы управления в течение стабильных периодов. Как обсуждалось выше в отношении ведущей программы, подпрограммы решают специфические задачи в рамках ведущей программы. Эти подпрограммы будут описаны в порядке, в котором они записаны в ведущей программе. Подпрограмма 480 задержки (dly 1) включает шаг постоянной нагрузки счетчика 482 для формирования цикла, шаг отрицательного приращения счетчика 484 и шаг проверки окончания цикла 486. При завершении цикла для требуемого числа циклов подпрограмма возвращается к программе, которая ее запрашивала. Подпрограмма выбора измерительного прибора (selmeter) 490 запрашивается в инициализационной части ведущей программы. Настоящая схема обратной связи и управления предлагаемого устройства может реализовываться на любых из существующих электроизмерительных приборах, использующих делитель напряжения или мост сопротивления типов, описанных ранее и включенных в описание для ссылки. Схема и программное обеспечение настоящего изобретения могут конфигурироваться для работы или со схемой делителя напряжения, как проиллюстрировано в предпочтительном воплощении, или схемой с мостом сопротивления. Подпрограмма выбора измерительного прибора проверяет контактный штырек порта в микропроцессорном устройстве управления. Этот штырек вытягивается или к высокому или низкому напряжению в зависимости от типа используемой схемы измерения сопротивления. Подпрограмма выбора измерительного прибора .490 включает шаг проверки штырька 492. Если штырек высокий, выполняется шаг инициализации 494 для схемы делителя напряжения. В противном случае выполняется шаг инициализации 496 для схемы моста сопротивления. При завершении любого шага инициализации программа возвращается к ведущей программе.a2dlow подпрограмма 500 измеряет ТА уровень в режиме низкого разрешения. Подпрограмма включает шаг инициализации 502 для установки внутреннего аналого-цифрового преобразователя (АЦП) микропроцессорного устройства управления на режим низкого разрешения. Затем запрашивается подпрограмма аналого-цифрового преобразователя (АЦП) (a2d) 504.a2dhigh подпрограмма 510 измеряет ТА уровень в режиме высокого разрешения. Подпрограмма включает шаг инициализации 512 для установки внутреннего АЦП микропроцессорного устройства управления на режим высокого разрешения. Затем запрашивается a2d подпрограмма 514. При возврате в шаге 516 очищается АЦП, и подпрограмма возвращается к программе, которая ее запрашивала. Использование режимов высокого и низкого разрешения дает возможность 8-ми битовому АЦП, по существу, работать как 12-ти битовый АЦП, который требуется для всего диапазона напряжения 0-5,2 В, в котором низкое разрешение находится в диапазоне 1-4,8 В и высокое разрешение находится в диапазоне 4,85,2 В. В режиме низкого разрешения АЦП воспринимает напряжение скользящего контакта ТА непосредственно, так что диапазон напряжения 1,4-5,2 В соответствует десятичным числам приблизительно от 67 до 255. В режиме высокого разрешения АЦП видит входной диапазон 1,0-5,2 В, который соответствует приблизительно диапазону 4,8-5,2 В на скользящем контакте ТА, который, в свою очередь, соответствует десятичным числам от 49 до 255.a2d подпрограмма 520 в шаге измеренного аналогового сигнала 522 преобразует аналоговый сигнал, измеренный на контактном штырьке 14 микропроцессорного устройства управления в цифровое значение при запросе a2dlow подпрограммой 500 и преобразует аналоговый сигнал, измеренный на контактном штырьке 15 микропроцессорного устройства управления в цифровое значение при запросе a2dhigh подпрограммой 510. Затем a2d подпрограмма 520 входит в режим ожидания 522 для обеспечения возможности завершения преобразования АЦП. При завершении преобразования микропроцессорное устройство управления генерирует прерывание в шаге 524, которое включает вектор адреса к a2dint подпрограмме 528, a2dint подпрограмма 528 отыскивает и запоминает данные аналого-цифрового преобразования и заканчивает работу соответствующего аппаратного средства 530. a2dint подпрограмма возвращается к a2d подпрограмме, которая, в свою очередь,возвращается к подпрограмме, которая ее запрашивала. Подпрограмма установки усиления 540 переключает усиливающий резистор в схеме с переменным сопротивлением между частями высокого и низкого программируемых коэффициентов усиления схемы с переменным сопротивлением. Подпрограмма установки усиления включает проверку электрического потенциала для определения того, установлен ли ТА АЦП в режим высокого разрешения или в режим низкого разрешения. Если установлен режим высо 001124 18 кого разрешения, шаг 542, тогда программа совершает переход к активному шагу программируемого высокого коэффициента усиления 544. В противном случае, имеет место дополнительная проверка. В этом случае при сравнении ТА уровня с низким пределом программируемого усиления шаг 546 переходит к активному шагу программируемого высокого усиления 544, если ТА уровень больше низкого предела программируемого усиления. В противном случае, выполняется дополнительная проверка. В этом случае, при сравнении ТА уровня с высоким пределом программируемого усиления шаг 548 переходит к активному шагу программируемого низкого усиления 550, если ТА уровень меньше высокого предела программируемого усиления. В противном случае, программа переходит к активному шагу программируемого высокого усиления 544. Для шага 544 или шага 550 подпрограмма конфигурирует фиксирующий вывод программируемого усиления 552 к соответствующему высокому или низкому положению установки. Затем setboost подпрограмма возвращается к программе, которая ее запрашивала. В представленном здесь предпочтительном воплощении предельное значение низкого программируемого усиления меньше предельного значения высокого программируемого усиления. Специалисты в данной области техники могут оценить, что описанная блок-схема программы не должна была бы требовать в таких случаях сравнения с высоким значением программируемого усиления, так как ТА уровень для этой проверки был бы всегда меньше высокого предела программируемого усиления. Однако в альтернативном воплощении высокий предел программируемого усиления меньше низкого предела программируемого усиления. Эта установка вызывает появление гистерезисной функции при переключении между установками. Это является полезным для предотвращения нежелательных скачков в выходном сигнале индикаторной схемы. Подпрограмма установки режима (setmode) 560 устанавливает режим высокого разрешения или низкого разрешения для АЦП. Подпрограмма в шаге 562 включает сравнение ТА уровня с пределом высокого разрешения. Программа устанавливает в шаге 564 битовый флаг высокого разрешения на высокий или логическую истину, если ТА уровень превышает предел высокого разрешения. В противном случае, в шаге 566 программа устанавливает бит высокого разрешения на низкий или ложь. После установки битового флага высокого разрешения программа возвращается к программе,которая ее запрашивала.tafind подпрограмма 570 использует ТА уровень для определения калибровки, требуемой для устранения любых нежелательных характеристик в сигналах на выходе схемы изме 19 рения сопротивления. В представленном здесь предпочтительном воплощении активная калибровка воспринимает ТА уровень для обнаружения изменений в установке ТА. В случае делителя напряжения программный диапазон напряжения, из которого может измеряться изменение в сопротивлении, уменьшается в прямой зависимости от увеличения в ТА уровне буферизованного напряжения. Когда ТА уровень становится больше или превышает предпочтительный ТА диапазон сопротивления 5-12,5 КОм, амплитуда сигнала, представляющего изменения в сопротивлении живого тела, соответственно и нежелательно уменьшается, tafind подпрограмма преодолевает эту проблему путем определения уровня регулировки в схеме с переменным сопротивлением для компенсации этих изменений, используя справочные таблицы для соответствующей регулировки обратной связи в схеме усиления для компенсации изменения в ТА напряжения и поддержания калибровки измеренного сигнала. tafind подпрограмма 570 включает шаг установки 572, который определяет местоположение правильной справочной таблицы для любой схемы измерения сопротивления типа делителя напряжения или типа моста сопротивления. Затем в шаге 574 проверяется, находится ли устройство в состоянии высокого или низкого разрешения. Если оно высокого разрешения, определяется местоположение части справочной таблицы для высокого разрешения в шаге памяти 576. Затем микропроцессорное устройство управления загружает ТА уровень и величины справочной таблицы в память в подготовительном шаге 578. Затем ТА уровень проверяется в шаге проверки ТА 580 путем сравнения с ТА индексным значением. Табличные величины считываются микропроцессорным устройством управления в порядке от самого низкого к самому высокому. Если ТА уровень меньше индекса, в шаге 582 загружается следующее ТА индексное значение и программа возвращается к шагу проверки 580. В противном случае, в справочном шаге 584 загружается соответствующая величина цифрового потенциометра. Затем в шаге 586 установки изменения в цифровом потенциометре загружаются величины, необходимые для изменения сопротивления в цифровом потенциометре. Затем подпрограмма возвращается к программе,которая ее запрашивала.dpset подпрограмма 590 конфигурирует микропроцессорное устройство управления для регулировки цифрового потенциометра. Подпрограмма 590 включает шаг загрузки регистра 592, шаг вычисления нового местоположения 594 и шаг проверки 596 для определения того,является ли новая величина выше или ниже. Если величина выше, выполняется шаг 598 флага направления установки для движения вверх,или же выполняется шаг 600 флага направления установки для движения вниз. Затем загружа 001124 20 ются величины для того, чтобы начать калибровку цифрового потенциометра 602. Затем подпрограмма возвращается к программе, которая ее запрашивала.clkdp подпрограмма 610 калибрует цифровой потенциометр в ответ на уровень напряжения, измеренный от ТА потенциометра. Подпрограмма включает шаг флага направления проверки 612. Если флаг является высоким, на цифровой потенциометр подается сигнал для счета вверх в шаге 614. Если флаг является низким, на цифровой потенциометр подается сигнал для счета вниз в шаге 616. Затем в шаге 618 делается проверка отсутствия движения. Если изменение является нулевым, подпрограмма возвращается к программе, которая ее запрашивала. В противном случае, цифровой потенциометр инициализируется в шаге 620 для того,чтобы начать изменять переменное сопротивление. На цифровой потенциометр подается сигнал для инкрементного изменения на одну единицу направления, определенного в течение выполнения шага направления проверки. Инкрементное изменение представляет собой 100 Ом, используя предпочтительный цифровой потенциометр. Затем запрашивается подпрограмма задержки в шаге 624 для обеспечения возможности приема и обработки сигнала цифровым потенциометром при отрицательном приращении и проверке счетчика в шаге 626. Если счетчик не на нуле (счет больше нуля),программа возвращается к шагу подачи сигнала 622 и продвигает цифровой потенциометр на другой инкрементный шаг. При достижении счетчиком нуля программа заканчивается и возвращается к шагу программы, в котором ее запрашивали. Из вышеприведенного описания должно быть понятно, что настоящее изобретение может быть использовано для активной калибровки усилителя к любой известной заданной нежелательной характеристике. Это может быть достигнуто при идентификации характеристики и ее соответствии измененному изменению во внутренних сигналах. Микропроцессор содержит справочные таблицы коэффициентов компенсации, хранимых в запоминающем устройстве, которые были выведены эмпирически путем измерения амплитуды изменения данного сопротивления для каждой точки, выбранной из общего входного сопротивления. На основании этих коэффициентов компенсации могут быть вычислены необходимые коэффициенты усиления и их соответствующие сопротивления обратной связи, тем самым устанавливая таблицу соответствия низковольтных (вывод 76) потенциалов и сопротивлений усиления, устанавливаемых в переменном сопротивлении 42. В процессе работы устройство инициализируется путем регулирования подстроечного переменного резистора 60 (фиг. 3), переключающей схемы усиления 48 (фиг. 4 В) и органа 21 управления чувствительностью (не показан), так что вывод низковольтного потенциала 76 (фиг. 3) балансируется для проверочного сопротивления 68 измерительного прибора в 5 КОм. Затем живое тело подсоединяется к внешним выводам 64 и 66 схемы измерения сопротивления. Для балансировки схемы согласно общему сопротивлению живого тела ручной регулятор 78 двигают до тех пор, пока в низковольтном выводе 76 не будет достигнут баланс с общим сопротивлением живого тела. В течение промежутка времени, когда напряжение на выводе 76 изменяется для достижения баланса с общим сопротивлением живого тела, схема обратной связи 52 (фиг. 2 и 4 С) обеспечивает подачу изменений напряжения на низковольтном выводе 76 на схеме управления 54. Схема управления 54, находящаяся обычно в режиме ожидания, пробуждается для передвижения ручного регулятора 78 при подаче сигнала посредством цифровой схемы 28. Схема управления 54 контролирует движение ручного регулятора 78 до завершения регулировки. При завершении регулировки схема управления 54 определяет величину регулировки усиления, используя справочную таблицу, и подает сигнал на схему компенсации 55 для регулировки коэффициента усиления схемы усиления. Коэффициент усиления регулируется для устранения нежелательных характеристик снижения чувствительности в ответ на увеличение низковольтного потенциала в выводе 76. Коэффициент усиления регулируется автоматически, так что чувствительность поддерживается на постоянном уровне независимо от изменений низковольтного потенциала в выводе 76. В альтернативном воплощении схемы калибровки в схему усиления включается управляемый напряжением операционный усилитель(не показано). В этом воплощении низковольтный вывод 76 подключают к входу для управляющего напряжения усилителя. Усилитель может размещаться с последовательным соединением отрицательного входного вывода с выходным выводом на выходном выводе, соответствующем выводу 130 (фиг. 4 А) повторителя напряжения. Положительный входной вывод должен был бы присоединяться к источнику постоянного высокого напряжения. Этот операционный усилитель калибрует коэффициент усиления усилителя пропорционально изменениям потенциала низкого напряжения. Операционным усилителем, подходящим для этой цели, является усилитель типа модели VCA610,производимый фирмой Burr Brown of Tucson,Arizona. Во втором альтернативном воплощении схемы калибровки ручной регулятор 78 может включать обычный спаренный переменный резистор, в котором второй резистор может иметь ступенчато нарастающую регулировку в нелинейном обратном сопротивлении к величине переменного резистора 82 (фиг. 3). Второй пе 001124 22 ременный резистор присоединялся бы между выводом опорного напряжения (фиг. 4 С) и отрицательным входным выводом схемы второго операционного усилителя (фиг. 4 В). Другое воплощение, в котором внешняя радиопомеха может уменьшаться, дополнительно включает покрытие из краски, изолирующей радиопомеху, наносимой на внутреннюю поверхность корпуса предлагаемого устройства. Подходящая краска для этой цели производится американской фирмой Sandstrom Products Co.,продаваемая под торговой маркой Sanpro A405,также известная как краска, образующая защищающее от электромагнитной помехи/радиопомехи серебряное покрытие. Хотя настоящее изобретение было описано в связи со считающимися на сегодняшний день самыми практичными предпочтительными воплощениями, совершенно ясно, что изобретение не должно ограничиваться описанными воплощениями, а наоборот, подразумевается, что оно охватывает различные модификации и эквивалентные устройства, находящиеся в пределах сущности изобретения, изложенной в прилагаемой формуле изобретения, и объем которого должен иметь наиболее широкую интерпретацию с тем, чтобы охватить все такие модификации и эквивалентные конструкции. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Устройство для индикации изменений в сопротивлении живого тела, содержащее схему измерения сопротивления, имеющую внешние выводы, схему усиления, подключенную к схеме измерения сопротивления, и индикаторную схему, подключенную к схеме усиления, и схему регулировки чувствительности, подключенную к указанной схеме усиления, отличающееся тем, что схема измерения сопротивления выполнена с возможностью измерения сопротивлений в первом диапазоне относительно низких переменных сопротивлений, измерения сопротивлений во втором диапазоне относительно высоких переменных сопротивлений на живом теле и для получения измеряемого сигнала,схема усиления выполнена с возможностью усиления измеряемого сигнала до воспринимаемого уровня,индикаторная схема выполнена с возможностью получения измеряемого сигнала в воспринимаемом виде, и схема регулировки чувствительности выполнена с возможностью автоматического увеличения чувствительности указанной индикаторной схемы для установки на высокое переменное сопротивление в указанном втором диапазоне, измеряемом в указанной схеме измерения сопротивления, и указанная схема регулировки чувствительности выполнена с возможностью автоматиче 23 ской регулировки чувствительности указанной индикаторной схемы для низкого переменного сопротивления в указанном втором диапазоне,измеряемом в указанной схеме измерения сопротивления. 2. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема регулировки чувствительности включает в себя схему управления. 3. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема регулировки чувствительности включает в себя спаренный потенциометр. 4. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема регулировки чувствительности включает в себя управляемый напряжением операционный усилитель. 5. Устройство для индикации изменений в сопротивлении живого тела по п.1, отличающееся тем, что указанная схема усиления включает в себя схему калибровки для автоматической регулировки коэффициента усиления указанной схемы усиления при срабатывании на перемещение указанного потенциометра регулировки. 6. Устройство для индикации изменений в сопротивлении живого тела по п.5, отличающееся тем, что указанная схема калибровки включает в себя схему обратной связи, подключенную с возможностью реагирования к указанной схеме измерения сопротивления для приема сигнала,характеризующего измеряемый входной сигнал,схему управления, подключенную с возможностью реагирования к указанной схеме обратной связи для определения значения компенсации с помощью указанного измеряемого входного сигнала, и схему компенсации, реагирующую на указанную схему управления и предназначенную для регулировки коэффициента усиления указанной схемы усиления посредством указанного значения компенсации для поддержания, в основном, постоянной амплитудной характеристики. 7. Устройство для измерения и индикации изменений в сопротивлении живого тела по п.5,отличающееся тем, что указанная схема калибровки включает в себя схему обратной связи для приема сигналов, характеризующих общее сопротивление живого тела. 8. Устройство для измерения и индикации изменений в сопротивлении живого тела по п.7,отличающееся тем, что указанная схема калибровки включает в себя схему управления, подключенную к указанной схеме обратной связи для определения из указанного входного сигнала сигнала компенсации, соответствующего из 001124 24 менению в коэффициенте усиления схемы усиления. 9. Устройство для измерения и индикации изменений в сопротивлении живого тела по п.7,отличающееся тем, что указанная схема калибровки включает в себя схему компенсации при приеме, предназначенную для приема указанного сигнала компенсации и для регулировки указанной схемы усиления, чтобы поддерживать, в основном, постоянную амплитудную характеристику. 10. Схема обратной связи и управления для использования в устройстве для индикации изменений в сопротивлении живого тела, содержащая схему обратной связи, оперативно подключенную к указанному устройству для контролирования известного состояния,схему управления, подключенную с возможностью реагирования к указанной схеме обратной связи для приема сигналов, характеризующих указанное известное состояние, и для выведения из указанных сигналов соответствующего корректирующего реагирования,схему компенсации, подключенную с возможностью реагирования к указанной схеме управления, для регулировки сообразно с указанным известным состоянием. 11. Схема обратной связи и управления по п.10, отличающаяся тем, что включает в себя программное средство в указанной схеме управления, причем программное средство включает в себя средство для считывания сигналов указанного известного состояния из указанной схемы обратной связи,средство для предвидения и определения реагирования на нежелательную характеристику с помощью сигналов, характеризующих указанное известное состояние,средство для генерирования отклика на указанную нежелательную характеристику, и средство для регулировки указанной схемы компенсации для устранения указанной нежелательной характеристики. 12. Схема обратной связи и управления по п.11, отличающаяся тем, что указанное средство предвидения и определения имеет режим ожидания. 13. Схема обратной связи и управления по п.11, отличающаяся тем, что указанное средство предвидения и определения включает в себя средство стабильности восприятия в указанном известном условии. 14. Схема обратной связи и управления по п.11, отличающаяся тем, что указанная схема управления включает в себя аналогo-цифровой преобразователь и указанное средство предвидения и определения включает в себя считывание данных, генерируемых от указанного аналого-цифрового преобразователя. 26 отрицательным входами в указанный операционный усилитель. 19. Устройство по п.6, отличающееся тем,что схема управления также содержит микроконтроллер для приема сигналов от указанной схемы обратной связи. 20. Устройство по п.6, отличающееся тем,что схема управления также содержит схему активации для активизирования указанной схемы управления при переходе указанного регулируемого в ручном режиме потенциометра. 21. Устройство по п.6, отличающееся тем,что указанное устройство включает в себя микроконтроллер в указанной схеме управления для приема сигналов от указанной схемы обратной связи и программное средство для конфигурирования указанного микроконтроллера и для генерирования сигнала калибровки при реагировании на указанные сигналы. 22. Устройство по п.21, отличающееся тем,что устройство включает в себя схему компенсации, включающую в себя цифровой потенциометр и предназначенную для подачи входного сигнала калибровки в указанную схему усиления. 23. Устройство по п.5, отличающееся тем,что указанное устройство содержит микроконтроллер в указанной схеме калибровки и программное средство для конфигурирования указанной схемы калибровки для непрерывного обнаружения изменений в регулируемом в ручном режиме потенциометре и для определения и установки режима разрешающей способности из числа совокупности заранее определенных режимов разрешающей способности. 24. Способ по п.17, отличающийся тем, что осуществляют регулирование в ручном режиме потенциометра как части определения общего сопротивления и установку режима разрешающей способности для определения общего сопротивления живого тела на один режим из числа совокупности заранее определенных режимов разрешающей способности. 25. Способ по п.24, отличающийся тем, что осуществляют также регулирование коэффициента усиления указанной схемы усиления посредством согласования заранее определенных сигналов коэффициента компенсации до заранее определенных значений изменения сопротивления, соответствующих изменениям в общем сопротивлении живого тела. 15. Устройство для индикации изменений в сопротивлении живого тела, содержащее схему измерения сопротивления, имеющую выходящие из нее выводы,схему усиления, имеющую выходящие из нее выводы,индикаторную схему, имеющую выходящие из нее выводы,совокупность управляемых в ручном режиме устройств, имеющих выходящие из них выводы,причем, по меньшей мере, один вывод выходит из каждой из указанных схем и из каждого из указанных управляемых в ручном режиме приборов, и отличающееся тем, что включает в себя, по меньшей мере, одну катушку индуктивности в указанной схеме измерения сопротивления и в указанной схеме усиления, в результате чего уменьшают радиопомеху, наводимую посредством указанных схем. 16. Устройство для индикации изменений в сопротивлении живого тела, содержащее схему измерения сопротивления, схему усиления,индикаторную схему и отличающееся тем, что включает в себя корпус, заключающий в себе указанную схему измерения сопротивления,указанную схему усиления и указанную индикаторную схему и слой краски на указанном корпусе, защищающий от радиопомехи. 17. Способ поддержания, в основном, постоянной амплитудной характеристики при реагировании на заранее определенный измеряемый входной сигнал в устройстве для измерения изменений в сопротивлении живого тела, при этом указанное устройство имеет схему измерения сопротивления, отличающийся тем, что осуществляют инициализацию указанной схемы измерения сопротивления и указанной схемы усиления, подключают живое тело к указанной схеме измерения сопротивления, определяют общее сопротивление в живом теле и регулируют коэффициент усиления указанной схемы усиления в соответствии с заранее определенным отношением, в результате чего для измеряемого изменения в сопротивлении формируют, в основном, постоянную амплитудную характеристику, подают моделированный измеряемый сигнал через компьютерный интерфейс. 18. Устройство по п.5, отличающееся тем,что схема усиления включает в себя операционный усилитель, имеющий конденсатор, подключенный в схеме между положительным и
МПК / Метки
МПК: A61B 5/053
Метки: живого, обратной, тела, амплитудной, изменений, схема, управления, характеристики, постоянной, устройстве, способ, поддержания, сопротивлении, индикации, устройство, связи, использования
Код ссылки
<a href="https://eas.patents.su/24-1124-ustrojjstvo-dlya-indikacii-izmenenijj-v-soprotivlenii-zhivogo-tela-shema-obratnojj-svyazi-i-upravleniya-dlya-ispolzovaniya-v-ustrojjstve-sposob-podderzhaniya-postoyannojj-amplitudn.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство для индикации изменений в сопротивлении живого тела, схема обратной связи и управления для использования в устройстве, способ поддержания постоянной амплитудной характеристики</a>
Унифицированные интерфейсная система и интегральная схема для блока связи
Номер патента: 407
Опубликовано: 24.06.1999
Автор: Хармен Джеффри А.
Метки: связи, система, интегральная, интерфейсная, блока, схема, унифицированные
Формула / Реферат:
1. Унифицированная интерфейсная система для обработки и разгрузки звуковых сообщений в постоянную память блока связи, содержащая телекоммуникационный интерфейс для приема звукового сообщения и средство для преобразования звукового сообщения в цифровые сигналы, когда оно принято не в цифровом виде, отличающаяся тем, что она включает в себя также средство для получения уплотненных цифровых сигналов, средство для получения записанных уплотненных...
Устройство световой индикации
Номер патента: 1005
Опубликовано: 28.08.2000
Авторы: Хайнес Брайан Д., Бевингтон Марк, Кассорла Эрл, Лупер Норман, Липски Марк
МПК: G09G 3/30
Метки: устройство, индикации, световой
Формула / Реферат:
1. Устройство электролюминесцентной световой индикации, применяемое в порядке доработки и предназначенное для использования с основным устройством с целью обеспечения световых эффектов как реакции на сигналы питания ламп, подаваемые от основного устройства, которые в ином случае использовались бы для питания ламп основного устройства, содержащее: систему электролюминесцентных ламп, включающую совокупность электролюминесцентных элементов; ...
Способ и устройство для поддержания твердых частиц во взвешенном состоянии в жидкости
Номер патента: 328
Опубликовано: 29.04.1999
Автор: Молтин Кристофер
МПК: C02F 3/12, C05F 17/00, C12M 1/04...
Метки: состоянии, способ, жидкости, частиц, взвешенном, поддержания, устройство, твердых
Формула / Реферат:
1. Резервуар (10) для жидкостей, имеющий устройство (15) для возбуждения перемещения жидкости в резервуаре, что вызывает циркуляцию, и устройство для направления жидкости для циркуляции, в котором упомянутое приводящее устройство (15) расположено в точке, находящейся выше самой нижней части (12) резервуара, а направляющее устройство содержит либо включает нижнюю направляющую поверхность (20), которой придана форма, обеспечивающая направление...
Устройство для отвода отдельной или нескольких емкостей в виде тела вращения из транспортирумого под действием скоростного напора потока емкостей в виде тела вращения и цилиндр с управляемо-выдвигаемым поршнем
Номер патента: 143
Опубликовано: 29.10.1998
Авторы: Голлер Ханс-Ульрих, Хойфт Бернхард
МПК: F15B 11/04, B65G 47/76, B65G 47/71...
Метки: нескольких, управляемо-выдвигаемым, устройство, транспортирумого, тела, отвода, потока, виде, напора, емкостей, действием, цилиндр, отдельной, поршнем, вращения, скоростного
Формула / Реферат:
1. Устройство для отвода отдельных емкостей (10) в виде тел вращения из транспортируемого под действием скоростного напора потока емкостей, содержащее первый транспортер (12) для потока емкостей и второй транспортер (18) для транспортировки выделенных из потока емкостей (10), причем второй транспортер (18) ответвляется от первого транспортера (12) у места (16) вывода, при этом первый транспортер (12) у места (16) вывода отклоняется под острым...
Способ компьютерной оптической топографии формы тела человека и устройство для его осуществления
Номер патента: 111
Опубликовано: 27.08.1998
Авторы: Фомичев Николай Гаврилович, Садовой Михаил Анатольевич, Сарнадский Владимир Николаевич
МПК: A61B 5/103
Метки: тела, топографии, компьютерной, осуществления, формы, устройство, способ, человека, оптической
Формула / Реферат:
1. Способ компьютерной оптической топографии формы тела человека (пациента) путем проецирования на обследуемую поверхность тела под заданным углом к этой поверхности изображения пространственной системы эквидистантных оптически контрастных прямых линий, видеосъемки изображения этой системы линий под углом, отличным от указанного угла проецирования, аналого-цифровое преобразование видеосигнала изображения, введение его в устройство памяти...
Предыдущий патент: Столб
Следующий патент: Метод предотвращения распространения радиации путем использования молекул фуллерена
Случайный патент: Карбидовольфрамовые покрытия и способ их изготовления