Способ адаптивной калмановской фильтрации в динамических системах

Формула / Реферат
1. Способ регулирования модели и параметров калибровки чувствительной системы, сопровождаемый вместе с упомянутой моделью внешними событиями посредством адаптивной калмановской фильтрации, при этом блоки вывода сигналов датчиков обеспечивают сигналы в ответ на упомянутые внешние события, и где ряд одновременно обрабатываемых значений выходных сигналов датчиков являются длинным, содержащий следующие шаги:
а) обеспечение блока базы данных для хранения информации о:
- множестве значений выходных сигналов датчиков в контрольных точках для некоторых из упомянутых датчиков и множестве значений для упомянутых внешних событий, соответствующих упомянутым значениям выходных сигналов датчиков в контрольных точках, или одновременных временных последовательностей упомянутых значений выходных сигналов от смежных датчиков для сравнения;
- упомянутых значениях выходных сигналов датчиков, сопровождаемых значениями для упомянутой модели и параметров калибровки и значений для упомянутых внешних событий, соответствующих ситуации; и
- управлениях упомянутых датчиков и изменениях в упомянутых внешних событиях, соответствующих новой ситуации;
б) обеспечение логического блока для доступа к упомянутым значениям выходных сигналов датчиков упомянутыми моделью и параметрами калибровки, причём упомянутый логический блок имеет двустороннюю линию связи с упомянутым блоком базы данных, и вычисление начальных значений для неизвестных модели и параметров калибровки с оценками точности за счёт использования, при необходимости, высокочастотного фильтра Ланге;
в) обеспечение упомянутых значений выходных сигналов датчиков, если доступно, для упомянутого логического блока;
г) обеспечение информации об упомянутых управлении и изменениях в упомянутый блок базы данных;
д) доступ к текущим значениям упомянутых модели и параметров калибровки и к элементам переходной матрицы и вычисление с помощью формул быстрой калмановской фильтрации (БКФ), при этом усовершенствование содержит диагонализацию ковариционной матрицы остаточных ошибок расширенной модели, получаемой применением коэффициентов FУ, Fs или М к расширенной модели в упомянутом логическом блоке обновлений упомянутых модели и параметров калибровки, при этом значения упомянутых внешних событий и их точности соответствуют упомянутой новой ситуации;
е) управление стабильностью упомянутой калмановской фильтрации путём отслеживания упомянутых оценок точности в упомянутом логическом блоке и путём индикации того, когда имеется необходимость для чего-либо из следующего: больше значений выходных сигналов датчиков, данных контрольных точек, сравнения датчиков или реконфигурации системы;
ж) регулировка тех значений упомянутых модели и параметров калибровки, для которых доступно устойчивое обновление.
2. Способ регулирования модели и параметров калибровки чувствительной системы, сопровождаемый вместе с упомянутой моделью внешними событиями с помощью адаптивной калмановской фильтрации, причём выходные блоки датчиков выдают сигналы в ответ на упомянутые внешние события, и в котором ряд одновременно обрабатываемых значений выходных сигналов датчиков является длинным, содержит следующие шаги:
а) обеспечение блока базы данных для хранения информации о:
- множестве значений выходных сигналов датчиков в контрольных точках для некоторых из упомянутых датчиков и множестве значений для упомянутых внешних событий, соответствующих упомянутым значениям выходных сигналов датчиков в контрольных точках, или одновременных временных последовательностей упомянутых значений выходных сигналов от смежных датчиков для сравнения;
- упомянутых значениях выходных сигналов датчиков, сопровождаемых значениями для упомянутой модели и параметров калибровки и значений для упомянутых внешних событий, соответствующих ситуации; и
- управлениях упомянутых датчиков и изменениях в упомянутых внешних событиях, соответствующих новой ситуации;
б) обеспечение логического блока для доступа к упомянутым значениям выходных сигналов датчиков упомянутыми моделью и параметрами калибровки, причём упомянутый логический блок имеет двустороннюю линию связи с упомянутым блоком базы данных, и вычисление начальных значений для неизвестных модели и параметров калибровки с оценками точности за счёт использования, при необходимости, высокочастотного фильтра Ланге;
в) обеспечение упомянутых значений выходных сигналов датчиков, если доступно, для упомянутого логического блока;
г) обеспечение информации об упомянутых управлении и изменениях в упомянутый блок базы данных;
д) доступ к текущим значениям упомянутых модели и параметров калибровки и к элементам переходной матрицы, и вычисление с помощью формул быстрой калмановской фильтрации (БКФ), полученных из инверсной формулы (26) Фробениуса:

при этом усовершенствование содержит диагонализацию ковариционной матрицы остаточных ошибок расширенной модели, получаемой применением коэффициентов Fy, Fs или М к расширенной модели в упомянутом логическом блоке, а также обновление упомянутых модели и параметров калибровки, при этом значения упомянутых внешних событий и их точности соответствуют упомянутой новой ситуации;
е) управление стабильностью упомянутой калмановской фильтрации путём отслеживания упомянутых оценок точности в упомянутом логическом блоке и путём индикации того, когда имеется необходимость для чего-либо из следующего: больше значений выходных сигналов датчиков, данных контрольных точек, сравнения датчиков или реконфигурации системы;
ж) регулировка тех значений упомянутых модели и параметров калибровки, для которых доступно устойчивое обновление.
Текст
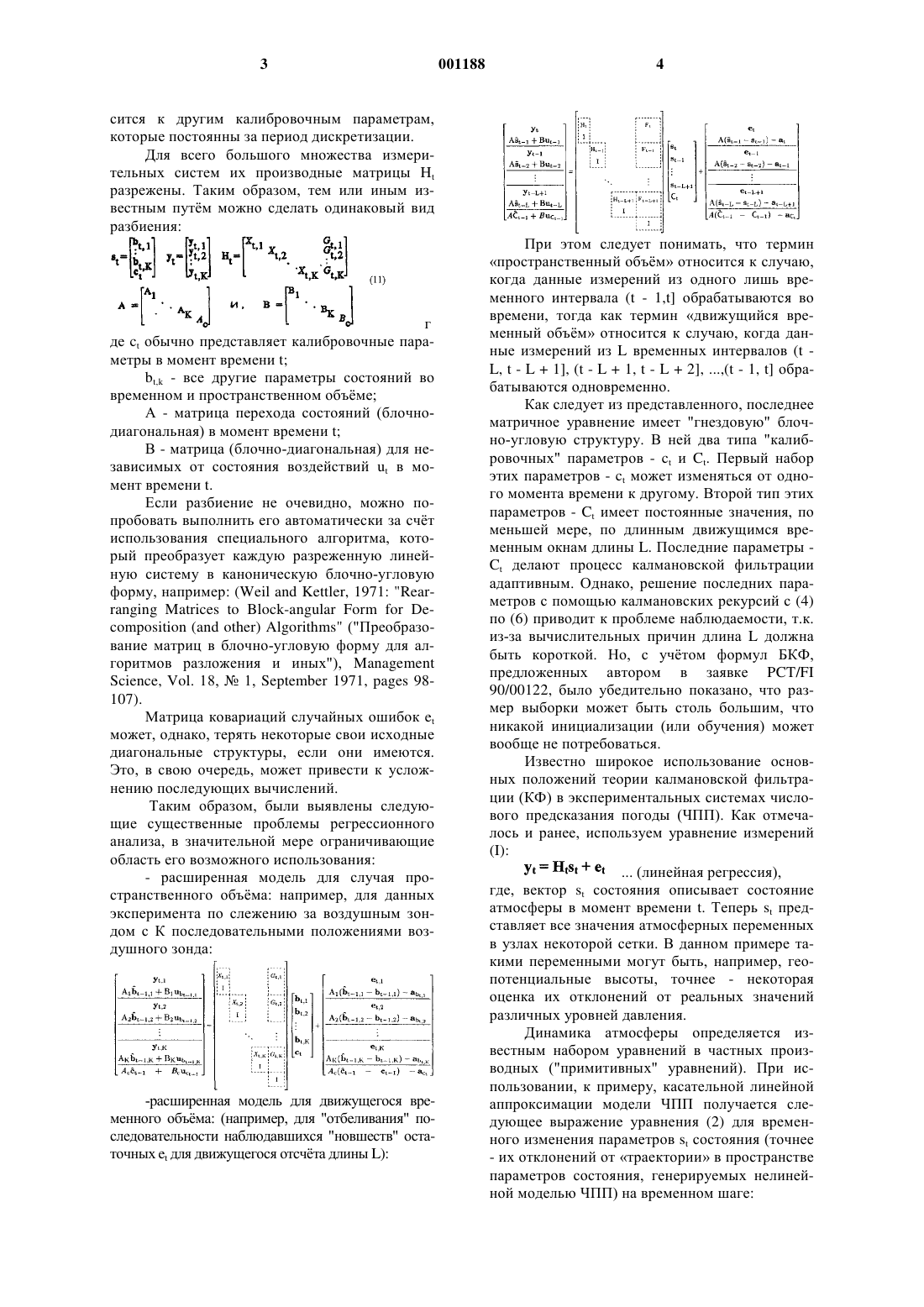
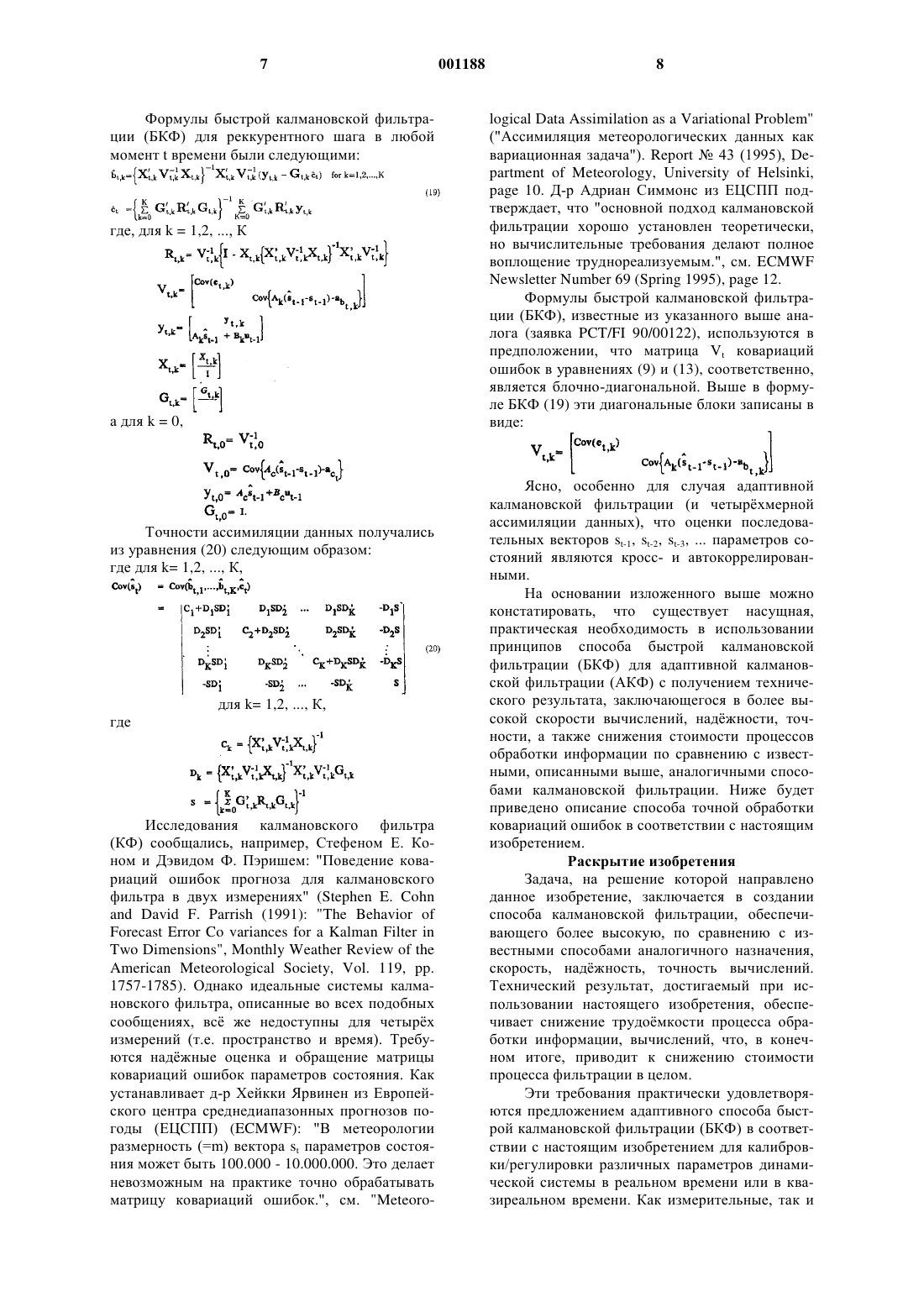
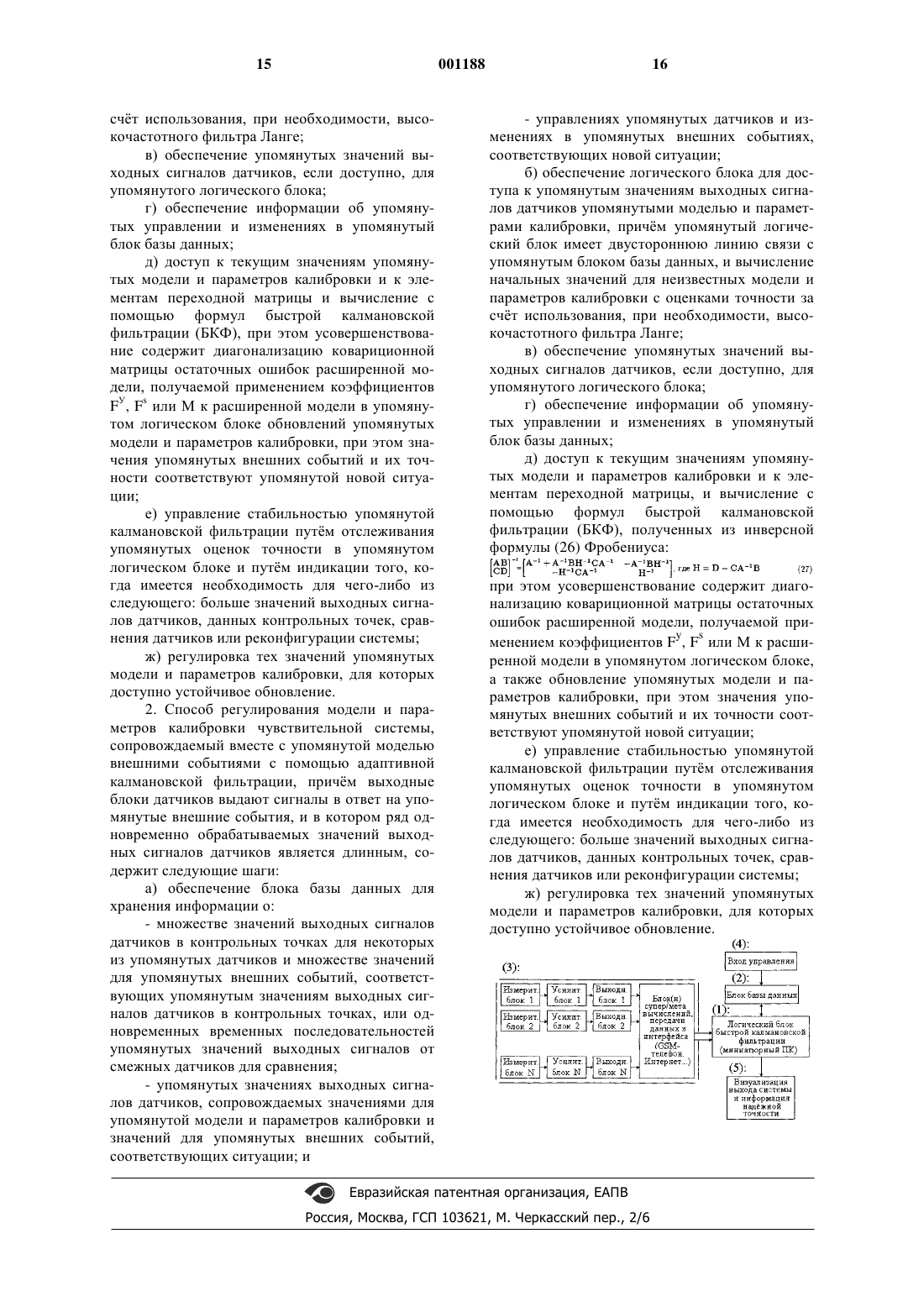
1 Область техники Данное изобретение относится в общем случае ко всем практическим применениям калмановской фильтрации, а конкретнее - к управляющим динамическим системам с необходимостью быстрой и наджной адаптации к обстоятельствам. Существующий уровень техники Калмановская фильтрация находит вс большее применение в различных областях техники, использующих системы автоматического управления разнообразными процессами. При этом используется фильтрация как с обычными калмановскими рекурсиями, так и с быстрой калмановской фильтрацией (БКФ) в равной степени как для калибровки чувствительной системы, так и для управления большой динамической системой. Лежащий в основе калмановской фильтрации марковский процесс (с конечной памятью) описывается уравнениями (1) - (3). Первое уравнение говорит о том, как вектор yt зависит от вектора st состояния в момент t времени (t = 0, 1, 2) и является линеаризованным уравнением измерения (или наблюдения): Матрица Ht представляет собой производную матрицу (якобиан), которая образована из частных производных действительных физических зависимостей. Второе уравнение описывает временное изменение всей системы и известно как линеаризованное уравнение системы (или состояния): Матрица At является матрицей переходов(якобианом), а Bt является матрицей (якобианом) управляющих усилений. Уравнение (2) говорит о том, как текущее состояние St всей системы развивается из предыдущего состоянияSt-1, управляющего/внешнего воздействия ut-1 и действий случайных ошибок at. Когда ошибки et измерений и системные ошибки at не являются ни автокоррелированными (т.е. белый шум), ни кросс-коррелированными, и задаются следующими матрицами ковариаций: то знаменитые формулы калмановской прямой рекурсии (4) - (6) дают нам наилучшую линейную несмещнную оценку (НЛНО) t настоящего состояния st следующим образом: и матрицу ковариаций его ошибок состояния следующим образом: где калмановская матрица усиления Kt определяется выражением: 2 Это рекуррентное линейное решение является (локально) оптимальным. Стабильность калмановского фильтра (КФ) требует, чтобы удовлетворялись также условия наблюдаемости и управляемости (Калман, 1960). Однако уравнение (6) слишком часто требует обращения чрезвычайно большой матрицы. Число n строк(и столбцов) матрицы равно числу элементов в векторе yt измерения. Большое n необходимо для удовлетворения условий наблюдаемости и управляемости. Это представляет собой проблему, уже решнную автором и изложенную в его более ранних заявках PCT/FI 90/00122 и PCT/FI 93/00192. Суть решения заключалась во введении следующего изменнного вида уравнения состояния: и объединения с уравнением измерения (1) для получения так называемой расширенной модели: Параметры состояния можно оценить при использовании общеизвестного решения задачи регрессионного анализа следующим образом: Результат эквивалентен использованию калмановских рекурсий алгебраически, но не численно (см., например, Harvey, 1981: "TimeSeries Models" ("Модели временных последовательностей"), Philip Allan Publishers Ltd, Oxford,UK, pp. 101-119). Размерность матрицы, подлежащей обращению в уравнении (9), равна теперь числу (m) элементов в векторе st состояния. Подход Харви является основополагающим для всех различных вариантов метода быстрой калмановской фильтрации (БКФ). Инициализация, или временное обучение калмановского фильтра (КФ) любого размера,для удовлетворения условия наблюдаемости,может быть выполнена посредством фильтра верхних частот Ланге (Ланге,1988). Он использует аналитическую формулу обращения разреженной матрицы для решения регрессионных моделей со следующей так называемой канонической блочно-угловой матричной структурой: Это матричное представление уравнения измерения, к примеру, эксперимента по взаимному сравнению полного определения ветра. Векторы b1, b2, , bk обычно относятся к координатам последовательных положений, например, погодного воздушного зонда, но могут также содержать те калибровочные параметры,которые имеют значительные временные или пространственные изменения. Вектор с отно 3 сится к другим калибровочным параметрам,которые постоянны за период дискретизации. Для всего большого множества измерительных систем их производные матрицы Ht разрежены. Таким образом, тем или иным известным путм можно сделать одинаковый вид разбиения: г де ct обычно представляет калибровочные параметры в момент времени t;bt,k - все другие параметры состояний во временном и пространственном объме; А - матрица перехода состояний (блочнодиагональная) в момент времени t; В - матрица (блочно-диагональная) для независимых от состояния воздействий ut в момент времени t. Если разбиение не очевидно, можно попробовать выполнить его автоматически за счт использования специального алгоритма, который преобразует каждую разреженную линейную систему в каноническую блочно-угловую форму, например: (Weil and Kettler, 1971: "Rearranging Matrices to Block-angular Form for Decomposition (and other) Algorithms" ("Преобразование матриц в блочно-угловую форму для алгоритмов разложения и иных"), ManagementScience, Vol. 18,1, September 1971, pages 98107). Матрица ковариаций случайных ошибок et может, однако, терять некоторые свои исходные диагональные структуры, если они имеются. Это, в свою очередь, может привести к усложнению последующих вычислений. Таким образом, были выявлены следующие существенные проблемы регрессионного анализа, в значительной мере ограничивающие область его возможного использования:- расширенная модель для случая пространственного объма: например, для данных эксперимента по слежению за воздушным зондом с К последовательными положениями воздушного зонда:-расширенная модель для движущегося временного объма: (например, для "отбеливания" последовательности наблюдавшихся "новшеств" остаточных et для движущегося отсчта длины L): При этом следует понимать, что термин пространственный объм относится к случаю,когда данные измерений из одного лишь временного интервала (t - 1,t] обрабатываются во времени, тогда как термин движущийся временный объм относится к случаю, когда данные измерений из L временных интервалов (t L, t - L + 1], (t - L + 1, t - L + 2], ,(t - 1, t] обрабатываются одновременно. Как следует из представленного, последнее матричное уравнение имеет "гнездовую" блочно-угловую структуру. В ней два типа "калибровочных" параметров - ct и Ct. Первый набор этих параметров - ct может изменяться от одного момента времени к другому. Второй тип этих параметров - Ct имеет постоянные значения, по меньшей мере, по длинным движущимся временным окнам длины L. Последние параметры Ct делают процесс калмановской фильтрации адаптивным. Однако, решение последних параметров с помощью калмановских рекурсий с (4) по (6) приводит к проблеме наблюдаемости, т.к. из-за вычислительных причин длина L должна быть короткой. Но, с учтом формул БКФ,предложенных автором в заявке PCT/FI 90/00122, было убедительно показано, что размер выборки может быть столь большим, что никакой инициализации (или обучения) может вообще не потребоваться. Известно широкое использование основных положений теории калмановской фильтрации (КФ) в экспериментальных системах числового предсказания погоды (ЧПП). Как отмечалось и ранее, используем уравнение измерений(I):(линейная регрессия),где, вектор st состояния описывает состояние атмосферы в момент времени t. Теперь st представляет все значения атмосферных переменных в узлах некоторой сетки. В данном примере такими переменными могут быть, например, геопотенциальные высоты, точнее - некоторая оценка их отклонений от реальных значений различных уровней давления. Динамика атмосферы определяется известным набором уравнений в частных производных ("примитивных" уравнений). При использовании, к примеру, касательной линейной аппроксимации модели ЧПП получается следующее выражение уравнения (2) для временного изменения параметров st состояния (точнее- их отклонений от траектории в пространстве параметров состояния, генерируемых нелинейной моделью ЧПП) на временном шаге: уравнение состояния:(дискретизированная динамико-стохастическая модель) Результаты (st) ассимиляции четырхмерных данных и прогнозы (st) ЧПП, соответственно, получаются из системы калмановских фильтров следующим образом:(шум измерения), а критические вычисления обновления выполняются с помощью следующих калмановских рекурсий:(калмановская матрица усиления)(точность оценки). Обращение матриц, необходимое здесь для вычисления калмановской матрицы усиления,исключительно трудно вычислять для реальной системы ЧПП, потому что система ассимиляции данных должна быть способна классифицировать несколько миллионов элементов данных в единицу времени. Д-р Т. Гал-Чен сообщал по этой проблеме в 1988 году следующее: "Есть надежда, что разработка мощных параллельных суперкомпьютеров (например, 1000 CRAY оперативной памяти, работающих цугом) сможет привести к алгоритмам, гораздо более близким к оптимальным" см. "Report of the Critical Review Panel - Lower Tropospheric Profiling Symposium: Needs and Technologies" ("Сообщение о панели критического обзора. Симпозиум по профилированию нижней тропосферы: Потребности и технологии"), Bulletin of the AmericanMeteorological Society, Vol. 71,5, May 1990,page 684. Известный способ - аналогичное техническое решение, изложенное в более ранней заявке автора PCT/FI 93/00192 - использует подход расширенной модели из уравнения (8): Следующие два набора уравнений получаются для целей обновления:(точность оценки),("прогноз" ЧПП)(15) но вместо(калмановская матрица усиления), способ БКФ, изложенный в заявке PCT/FI 93/00192, позволяет получить: Подход расширенной модели является наилучшим для использования обычных калмановских рекурсий для большого вектора входных данных yt, потому что вычисление калмановской матрицы Kt усиления требует огромного обращения матриц, когда Cov(st) неизвестно. Оба способа эквивалентны алгебраически и статистически, но отнюдь не численно. Однако формулы расширенной модели вс же слишком сложны для численной обработки. Это, во-первых, потому, что вектор st состояния содержит большое количество (=m) данных из узлов сетки для реалистичного представления атмосферы. Во-вторых, имеется много других параметров состояния, которые нужно включать в вектор состояния для реалистичной системы ЧПП. Это, в первую очередь, относится к систематическим (калибровочным), ошибкам наблюдающих систем, а также к так называемым схемам физической параметризации маломасштабных атмосферных процессов. Известно несколько примов решения обозначенных выше проблем. Так, калибровочные проблемы, характерные для указанного ранее аналога (заявка PCT/FI 93/00192) преодолеваются путм использования прима разъединения состояний. Это осуществляется посредством выполнения следующего разбиения: где ct обычно представляет "калибровочные" параметры в момент времени t, bt,k - значения атмосферных параметров в узле сетки k (k=1, ,К),А - матрица переходов состояния в моментt (подматрицы A1, , АK, АC),В - матрица управляющих усилений (подматрицы B1, , ВK, ВC). Решив таким образом проблему калибровки, тем не менее, имеется ещ одна существенная проблема регрессионного анализа: 7 Формулы быстрой калмановской фильтрации (БКФ) для реккурентного шага в любой момент t времени были следующими: а для k = 0, Точности ассимиляции данных получались из уравнения (20) следующим образом: где для k= 1,2, , К, для k= 1,2, , К,где(КФ) сообщались, например, Стефеном Е. Коном и Дэвидом Ф. Пэришем: "Поведение ковариаций ошибок прогноза для калмановского фильтра в двух измерениях" (Stephen E. CohnAmerican Meteorological Society, Vol. 119, pp. 1757-1785). Однако идеальные системы калмановского фильтра, описанные во всех подобных сообщениях, вс же недоступны для четырх измерений (т.е. пространство и время). Требуются наджные оценка и обращение матрицы ковариаций ошибок параметров состояния. Как устанавливает д-р Хейкки Ярвинен из Европейского центра среднедиапазонных прогнозов погоды (ЕЦСПП) (ECMWF): "В метеорологии размерность (=m) вектора st параметров состояния может быть 100.000 - 10.000.000. Это делает невозможным на практике точно обрабатывать матрицу ковариаций ошибок.", см. "Meteoro 001188("Ассимиляция метеорологических данных как вариационная задача"). Report43 (1995), Department of Meteorology, University of Helsinki,page 10. Д-р Адриан Симмонс из ЕЦСПП подтверждает, что "основной подход калмановской фильтрации хорошо установлен теоретически,но вычислительные требования делают полное воплощение труднореализуемым.", см. ECMWFNewsletter Number 69 (Spring 1995), page 12. Формулы быстрой калмановской фильтрации (БКФ), известные из указанного выше аналога (заявка PCT/FI 90/00122), используются в предположении, что матрица Vt ковариаций ошибок в уравнениях (9) и (13), соответственно,является блочно-диагональной. Выше в формуле БКФ (19) эти диагональные блоки записаны в виде: Ясно, особенно для случая адаптивной калмановской фильтрации (и четырхмерной ассимиляции данных), что оценки последовательных векторов st-1, st-2, st-3,параметров состояний являются кросс- и автокоррелированными. На основании изложенного выше можно констатировать, что существует насущная,практическая необходимость в использовании принципов способа быстрой калмановской фильтрации (БКФ) для адаптивной калмановской фильтрации (АКФ) с получением технического результата, заключающегося в более высокой скорости вычислений, наджности, точности, а также снижения стоимости процессов обработки информации по сравнению с известными, описанными выше, аналогичными способами калмановской фильтрации. Ниже будет приведено описание способа точной обработки ковариаций ошибок в соответствии с настоящим изобретением. Раскрытие изобретения Задача, на решение которой направлено данное изобретение, заключается в создании способа калмановской фильтрации, обеспечивающего более высокую, по сравнению с известными способами аналогичного назначения,скорость, наджность, точность вычислений. Технический результат, достигаемый при использовании настоящего изобретения, обеспечивает снижение трудомкости процесса обработки информации, вычислений, что, в конечном итоге, приводит к снижению стоимости процесса фильтрации в целом. Эти требования практически удовлетворяются предложением адаптивного способа быстрой калмановской фильтрации (БКФ) в соответствии с настоящим изобретением для калибровки/регулировки различных параметров динамической системы в реальном времени или в квазиреальном времени. Как измерительные, так и 9 системные ошибки отбеливаются и частично ортогонализируются, как описано в данном описании. Вычисления БКФ выполняются настолько близко к оптимальному калмановскому фильтру, насколько это необходимо по условиям наблюдаемости и управляемости. Оценнные вариации и ковариации ошибок обеспечивают инструмент для отслеживания устойчивости фильтра. Наилучший режим для осуществления изобретения Перепишем линеаризованное уравнение измерения (или наблюдения) где et теперь представляет "белый" шум, который не коррелирует ни с еt-1, et-2, , ни с st-1, st-2 ни с at, аt-1, аt-2,Матрица Ht - по-прежнему та же самая производная матрица, как и прежде,которая образуется из частных производных от физических зависимостей между измерениями(11) (прежнее предположение о блочнодиагональном характере матриц А и В более не действительно). Матрица Fty описывает, как систематическая ошибка измерений зависит от параметров калибровки или "калибровочного типа" (вектора Сt), которые постоянны во времени или изменяются лишь медленно. Столбцы матриц Fty, Ft-1y, Ft-2y,представляют частные производные, волновые формы наподобие синусоид, прямоугольных колебаний, "импульсных" функций и т.п. и эмпирические ортогональные функции (ЭОФ), зависящие от того, что известно о физических зависимостях, регрессии и авторегрессии (АР) систематических ошибок измерений. Элементы оценнного вектора Ct будут затем определять амплитуды факторов "красного" шума. Сошлмся на точно такую же расширенную модель для движущегося временного объма для "отбеливания" наблюдавшихся "новых" последовательностей измерений в верхней части стр. 6. Аналогично, перепишем линеаризованное уравнение системы или состояния где at теперь представляет "белый" шум, который не коррелирует ни с et, еt-1, еt-2, , ни с st-1,st-2, , ни с at-1, аt-2,Матрица Аt - по-прежнему та же самая матрица переходов состояния, которая образуется из частных производных физических зависимостей между состояниями st и предыдущими состояниями st-1. Матрица Fts описывает, как зависят систематические ошибки динамической модели (например, ЧПП) от параметров калибровки или калибровочного типа (вектора Сt), которые постоянны во времени или изменяются лишь медленно. Столбцы матриц Fts, Ft-1s, Ft-2s ,представляют частные производные, волновые формы наподобие синусоид, прямоугольных колебаний, "импульсных" функций и т.п. и эмпирические ортогональные 10 функции (ЭОФ), зависящие от того, что известно о физических зависимостях, регрессии и авторегрессии (АР) систематических ошибок измерений. Элементы оценнного вектора Ct будут затем определять амплитуды факторов "красного" шума. Матрица dAt говорит о том, как систематические ошибки переходов состояния динамической модели (ЧПП) зависят от преобладающих (погодных) условий. Если они неизвестны,но изменяются лишь медленно, делается регулировка движущимся усреднением (ДУ) вместе со способом БКФ, как описано далее. Воздействие определяется из системного уравнения (22) и переписывается следующим образом: где Мt-1 - матрица, состоящая из m диагональных матриц размера mxm,s1, s2, , sm - m скалярных элементов вектора st-1 состояния,rt - вектор-столбец всех элементов размером mxm матрицы dAt. Уравнение (23) реверсирует порядок перемножения, что делает теперь возможным оценить элементы матрицы dAt как обычные параметры регрессии. Поэтому возникает следующая серьзная проблема регрессионного анализа: расширенная модель для движущегося временного объма (т.е. для отбеливания новых последовательностей остаточных et и at для движущегося отсчта длины L): Приведнное выше матричное уравнение имеет "гнездовую" блочно-угловую структуру. Может быть три типа различных "калибровочных" параметров. Первый тип ct вводится в данные каждого временного шага t. Два других типа представляются вектором Ct. Первый набор этих параметров используется для отбеливания и частичной ортогонализации ошибок измерений и системы (т.е. для блочной диагонализации матрицы ковариации ошибок). Второй набор,т.е. rt, используется для коррекции грубых ошибок в матрицах переходов состояния. Последние два набора параметров имеют более или менее постоянные значения по длинному движущемуся временному окну и делают процесс калмановской фильтрации адаптивным. Следует также отметить, что матрица Мt-1 не может получить свой полный размер (mxm)2,как указано в уравнении (23). Это потому, что условие наблюдаемости станет невыполнимым,т.к. будет слишком много неизвестных значе 11 ний. Таким образом, матрица Mt-1 должна быть эффективно "сжата", чтобы представлять только те элементы матрицы Мt, которые относятся к серьзным ошибкам переходов состояния. Такие переходы находятся путм, например, использования так называемых максимальных корреляционных методов. На деле, спорадические и медленно мигрирующие конфигурации могут развиваться в пространстве векторов параметров состояния. Это обычно явления малого масштаба и они не могут быть адекватно описаны матрицами переходов состояния, выделенными только лишь из уравнений модели. Для поддержания полной стабильности, все оценнные элементы матрицы dAt поддерживаются наблюдаемыми в движущемся усреднении (ДУ) измерений, - например, путм отслеживания их оценнных ковариаций в уравнении (20). Формулы быстрой калмановской фильтрации (БКФ) для временного окна длины L в момент времени t получаются тогда следующими: Иногда, учитывая потребности практики,бывает необходимо отфильтровать некоторые из компонентов ошибок для лучшего приближения к оптимальности. В этом случае единичные матрицы (1) следует заменить соответствующим образом. Формулы БКФ, приведнные здесь и в аналогах (заявки PCT/FI 90/00122 и PCT/FI 93/00192), основаны на предположении, что матрицы ковариаций ошибок являются блочнодиагональными. Попытки решить все параметры Ct с помощью обычных калмановских рекурсий (4) - (6) обречены на неудачу из-за серьзных проблем наблюдаемости и управляемости,т.к. вычислительные ограничения запрещают брать длину L окна достаточно длинной. Однако, при использовании формул БКФ, временное окно можно брать таким длинным, что последовательности инициализации или временного 12 обучения фильтра могут стать совершенно излишними. Различные формулы для адаптивного быстрого фильтра Калмана могут быть получены из системы нормальных уравнений линеаризованного регрессивного уравнения (24) рекурсивньм использованием формулы Фробениуса: Формулы (20) и (26), как и любой иной тип БКФ формул, полученных из формулы (26) Фробениуса, соответствуют изобретнному способу. К примеру, существуют эффективные вычислительные способы обращения симметричных полосно-диагональных матриц. Матрицы ковариации ошибок числовых прогнозов погоды обычно полосно-диагональны. Мы можем исходить непосредственно из системы (8) уравнений без слияния параметров s состояния в блоки наблюдений регрессионной задачи (18). Их матрица ковариаций ошибок может затем обращаться как один большой блок, и рекуррентное использование формулы Фробениуса приведт к формулам БКФ, аналогичным формулам (25). Все матрицы, подлежащие обращению для решения больших моделей регрессионного анализа, поддерживаются достаточно малыми за счт использования предложенных полуаналитических вычислительных способов. Предпочтительное выполнение изобретения показано на фиг. 1 и будет описано ниже. Суперштурман, или навигационный примник, основан на миниатюрном персональном компьютере (ПК), который выполняет функции логического блока (1) калмановской фильтрации путм использования обобщнного способа быстрой калмановской фильтрации (БКФ). Общая концепция примника включает в себя интегральный датчик, удалнную систему (3) измерения, обработки и передачи данных, например, национальной атмосферно-океанической службы, и, необязательно, имеющийся в готовом виде примник общего пользования. Блок(2) базы данных, выполняемый на миниатюрном ПК, содержит обновляемую информацию по аспектам управления (4) и характеристик различных подсистем, а также вспомогательную информацию, такую как географические карты. На основании всех этих входов логический блок(1) обеспечивает трхмерные визуализации (5) в реальном времени о том, что происходит, за счт использования рекурсий БКФ для системы(24) уравнений, и о том, что будет иметь место в ближайшем будущем, за счт использования прогнозов из уравнений (15). Информация с наджной точностью обеспечивается также,когда наблюдающей системой (3) удовлетворяются общеизвестные условия стабильности оптимальной калмановской фильтрации. Эти ва 13 риации и ковариации ошибок вычисляются за счт использования уравнений (15) и (20). Система (3) обработки центрированных данных обеспечивает оценки матрицы А переходов состояния для каждого временного шага t. Эти матрицы затем локально регулируются (1) для учта наблюдавшихся маломасштабных переходов, которые случаются в атмосферной/ океанической среде (см., к примеру. Cotton, ThompsonMielke, 1994: "Real-Time Mesoscale Predictionon Workstations" ("Среднемасштабные прогнозы в реальном времени на рабочих станциях").Bulletin of the American Meteorological Society,Vol. 75,3, March 1994, pp. 349-362). Совершенно очевидно, что могут быть осуществлены многие другие изменения по отношению к описанному выше изобретению без отхода от духа этого изобретения. Поэтому следует понимать, что объм изобретения не должен рассматриваться как ограниченный описанным конкретным выполнением, т.к. лишь формула изобретения может содержать такие ограничения. Источники информации, принятые во внимание при оформлении заявки:(2) Lange, A.A. (1982): "Multipath propagation of VLF Omega signals". IEEE PLANS '82 Position Location and Navigation Symposium Record, December 1982, 302-309. (Ланге A.A. "Многолучевое распространение сверхнизкочастотных сигналов Омега").(Ланге A.A. "Интеграция, калибровка и взаимное сравнение датчиков определения параметров ветра)University Press/Clarendon Press, Oxford. 19988,311-327. (Ланге A.A. "Высокочастотный фильтр для оптимальной калибровки систем наблюдения с приложениями").(Ланге A.A. "Определение смещений радиозонда с использованием измерений спутниковых излучений").WO 90/13794, PCT/FI 90/00122, 15 November 1990. (Ланге А.А. "Устройство и способ калибровки измерительной системы", международная заявка PCT/FI 90/00122, 15.11.90, публикация(Ланге А.А. "Способ быстрой калмановской фильтрации в больших динамических системах", международная заявка PCT/FI 93/00192,11.11.93, публикация WO 93/22625).(8) Lange, А.А. (1994): "A surface-based hybrid upper-air sounding system". WMO Instruments and Observing Methods Report57,175177. (Ланге А.А. "Наземная гибридная система зондирования верхних слоев атмосферы"). ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ регулирования модели и параметров калибровки чувствительной системы,сопровождаемый вместе с упомянутой моделью внешними событиями посредством адаптивной калмановской фильтрации, при этом блоки вывода сигналов датчиков обеспечивают сигналы в ответ на упомянутые внешние события, и где ряд одновременно обрабатываемых значений выходных сигналов датчиков является длинным, содержащий следующие шаги: а) обеспечение блока базы данных для хранения информации о:- множестве значений выходных сигналов датчиков в контрольных точках для некоторых из упомянутых датчиков и множестве значений для упомянутых внешних событий, соответствующих упомянутым значениям выходных сигналов датчиков в контрольных точках, или одновременных временных последовательностей упомянутых значений выходных сигналов от смежных датчиков для сравнения;- упомянутых значениях выходных сигналов датчиков, сопровождаемых значениями для упомянутой модели и параметров калибровки и значений для упомянутых внешних событий,соответствующих ситуации; и- управлениях упомянутых датчиков и изменениях в упомянутых внешних событиях,соответствующих новой ситуации; б) обеспечение логического блока для доступа к упомянутым значениям выходных сигналов датчиков упомянутыми моделью и параметрами калибровки, причм упомянутый логический блок имеет двустороннюю линию связи с упомянутым блоком базы данных, и вычисление начальных значений для неизвестных модели и параметров калибровки с оценками точности за счт использования, при необходимости, высокочастотного фильтра Ланге; в) обеспечение упомянутых значений выходных сигналов датчиков, если доступно, для упомянутого логического блока; г) обеспечение информации об упомянутых управлении и изменениях в упомянутый блок базы данных; д) доступ к текущим значениям упомянутых модели и параметров калибровки и к элементам переходной матрицы и вычисление с помощью формул быстрой калмановской фильтрации (БКФ), при этом усовершенствование содержит диагонализацию ковариционной матрицы остаточных ошибок расширенной модели, получаемой применением коэффициентовFУ, F или М к расширенной модели в упомянутом логическом блоке обновлений упомянутых модели и параметров калибровки, при этом значения упомянутых внешних событий и их точности соответствуют упомянутой новой ситуации; е) управление стабильностью упомянутой калмановской фильтрации путм отслеживания упомянутых оценок точности в упомянутом логическом блоке и путм индикации того, когда имеется необходимость для чего-либо из следующего: больше значений выходных сигналов датчиков, данных контрольных точек, сравнения датчиков или реконфигурации системы; ж) регулировка тех значений упомянутых модели и параметров калибровки, для которых доступно устойчивое обновление. 2. Способ регулирования модели и параметров калибровки чувствительной системы,сопровождаемый вместе с упомянутой моделью внешними событиями с помощью адаптивной калмановской фильтрации, причм выходные блоки датчиков выдают сигналы в ответ на упомянутые внешние события, и в котором ряд одновременно обрабатываемых значений выходных сигналов датчиков является длинным, содержит следующие шаги: а) обеспечение блока базы данных для хранения информации о:- множестве значений выходных сигналов датчиков в контрольных точках для некоторых из упомянутых датчиков и множестве значений для упомянутых внешних событий, соответствующих упомянутым значениям выходных сигналов датчиков в контрольных точках, или одновременных временных последовательностей упомянутых значений выходных сигналов от смежных датчиков для сравнения;- упомянутых значениях выходных сигналов датчиков, сопровождаемых значениями для упомянутой модели и параметров калибровки и значений для упомянутых внешних событий,соответствующих ситуации; и- управлениях упомянутых датчиков и изменениях в упомянутых внешних событиях,соответствующих новой ситуации; б) обеспечение логического блока для доступа к упомянутым значениям выходных сигналов датчиков упомянутыми моделью и параметрами калибровки, причм упомянутый логический блок имеет двустороннюю линию связи с упомянутым блоком базы данных, и вычисление начальных значений для неизвестных модели и параметров калибровки с оценками точности за счт использования, при необходимости, высокочастотного фильтра Ланге; в) обеспечение упомянутых значений выходных сигналов датчиков, если доступно, для упомянутого логического блока; г) обеспечение информации об упомянутых управлении и изменениях в упомянутый блок базы данных; д) доступ к текущим значениям упомянутых модели и параметров калибровки и к элементам переходной матрицы, и вычисление с помощью формул быстрой калмановской фильтрации (БКФ), полученных из инверсной формулы (26) Фробениуса: при этом усовершенствование содержит диагонализацию ковариционной матрицы остаточных ошибок расширенной модели, получаемой приy s менением коэффициентов F , F или М к расширенной модели в упомянутом логическом блоке,а также обновление упомянутых модели и параметров калибровки, при этом значения упомянутых внешних событий и их точности соответствуют упомянутой новой ситуации; е) управление стабильностью упомянутой калмановской фильтрации путм отслеживания упомянутых оценок точности в упомянутом логическом блоке и путм индикации того, когда имеется необходимость для чего-либо из следующего: больше значений выходных сигналов датчиков, данных контрольных точек, сравнения датчиков или реконфигурации системы; ж) регулировка тех значений упомянутых модели и параметров калибровки, для которых доступно устойчивое обновление.
МПК / Метки
МПК: G01D 18/00
Метки: адаптивной, динамических, способ, фильтрации, системах, калмановской
Код ссылки
<a href="https://eas.patents.su/9-1188-sposob-adaptivnojj-kalmanovskojj-filtracii-v-dinamicheskih-sistemah.html" rel="bookmark" title="База патентов Евразийского Союза">Способ адаптивной калмановской фильтрации в динамических системах</a>
Способ контроля частичных разрядов в электрическом силовом трансформаторе
Номер патента: 19
Опубликовано: 30.12.1997
Авторы: Эриксон Томас, Лейон Матс
МПК: G01R 31/02
Метки: трансформаторе, разрядов, частичных, контроля, электрическом, способ, силовом
Формула / Реферат:
1. Способ контроля частичных разрядов в электрическом силовом трансформаторе (1) при нормальных рабочих условиях, заключающийся в том, что магнитное поле на высоковольтном вводе (2) силового трансформатора воспринимается индуктивным датчиком (6), состоящим из по крайней мере одной катушки (6a,6b), установленной на вводе (2), электрическое поле на вводе (2) воспринимается емкостным датчиком, выходной сигнал от указанных датчиков подается в блок...
Предыдущий патент: Способ установления прямой зашифрованной связи между двумя терминалами сети радиосвязи с подвижными абонентами и устройства станции и терминал
Следующий патент: Устройство для электропитания и монтажа множества электрических приборов
Случайный патент: Система контролируемой доставки