Способ компьютерной оптической топографии формы тела человека и устройство для его осуществления
Номер патента: 111
Опубликовано: 27.08.1998
Авторы: Фомичев Николай Гаврилович, Садовой Михаил Анатольевич, Сарнадский Владимир Николаевич

Формула / Реферат
1. Способ компьютерной оптической топографии формы тела человека (пациента) путем проецирования на обследуемую поверхность тела под заданным углом к этой поверхности изображения пространственной системы эквидистантных оптически контрастных прямых линий, видеосъемки изображения этой системы линий под углом, отличным от указанного угла проецирования, аналого-цифровое преобразование видеосигнала изображения, введение его в устройство памяти электронно-вычислительной машины (9) и обработку преобразованного сигнала для получения количественных параметров рельефа поверхности, отличающийся тем, что предварительно указанную систему линий, в которой ширина каждой линии равна ширине промежутка между соседними линиями с возможной точностью, проецируют под указанным заданным углом на отражающий плоский экран (7), который располагают за местом для установки пациента относительно точки видеосъемки и ортогонально направлению видеосъемки, осуществляют видеосъемку полученного изображения, аналого-цифровое преобразование видеосигнала и введение его в устройство памяти электронно-вычислительной машины (9), после чего располагают пациента перед указанным экраном (7) исследуемой поверхностью ортогонально этому направлению видеосъемки и далее после упомянутого введения в устройство памяти электронно-вычислительной машины (9) видеосигнала изображения с поверхности тела пациента указанную обработку введенных видеосигналов осуществляют путем определения разности фаз между пространственно-модулированным видеосигналом, образованным изображением на экране (7), и пространственно-модулированным видеосигналом, образованным изображением на поверхности тела пациента.
2. Способ по п.1, отличающийся тем, что в нем указанную обработку видеосигналов дополняют формированием изображения поверхности тела пациента с яркостью изображения, пропорциональной указанной разности фаз по модулю 2p.
3. Способ по пп.1, 2 отличающийся тем, что в нем указанную обработку видеосигналов дополняют формированием изображения поверхности тела пациента с яркостью изображения, пропорциональной указанной разности фаз.
4. Способ по пп.1, 2, 3 отличающийся тем, что в нем указанную обработку видеосигналов дополняют формированием изображения поверхности тела пациента с изолиниями постоянных разностей указанных фаз.
5. Устройство для компьютерной оптической топографии, преимущественно для определения деформации позвоночника, содержащее источник (1) направленного оптического излучения с установленным на его выходе средством (2) для формирования изображения пространственной системы эквидистантных оптически контрастных прямых линий и телевизионную камеру (телекамеру) (3), установленные со скрещением осей их оптических путей под заданным углом, образующим стереобазу источника (1) и телекамеры (3) в области размещения исследуемого пациента, средство (8) фиксации положения указанного пациента, а также электронно-вычислительную машину (9), снабженную средством (10) ввода аналогового сигнала с телекамеры (3) в устройство памяти электронно-вычислительной машины (9), отличающееся тем, что в него введен отражающий плоский экран (7), установленный в области указанного скрещения осей оптических путей источника (1) направленного оптического излучения и телекамеры (3) и ортогонально оси оптического пути телекамеры, и в указанной системе линий ширина каждой линии с возможной точностью равна ширине промежутка между соседними линиями.
6. Устройство по п.5, отличающееся тем, что в нем указанный отражающий экран (7) установлен вертикально, на экране линии указанной пространственной системы линий ориентированы вертикально и указанная стереобаза источника (1) и телекамеры (3) выбрана горизонтальной.
7. Устройство по п.5, отличающееся тем, что в нем указанный отражающий экран (7), источник (1) направленного оптического излучения и телекамера (3) установлены с возможностью взаимного перемещения вдоль оси оптического пути телекамеры (3) и изменения направления излучения указанного источника (1).
8. Устройство по п.6, отличающееся тем, что в нем указанный отражающий экран (7), источник (1) направленного оптического излучения и телекамера (3) установлены с возможностью взаимного перемещения вдоль оси оптического пути телекамеры (3) и изменения направления указанного источника (1).
9. Устройство по п.8, отличающееся тем, что в нем средство (8) фиксации положения пациента выполнено с возможностью вертикального перемещения пациента.
10. Устройство по пп.5-9, отличающееся тем, что в нем источник (1) направленного оптического излучения и/или телекамера (3) содержат объектив со средством для изменения размеров изображения.

Текст
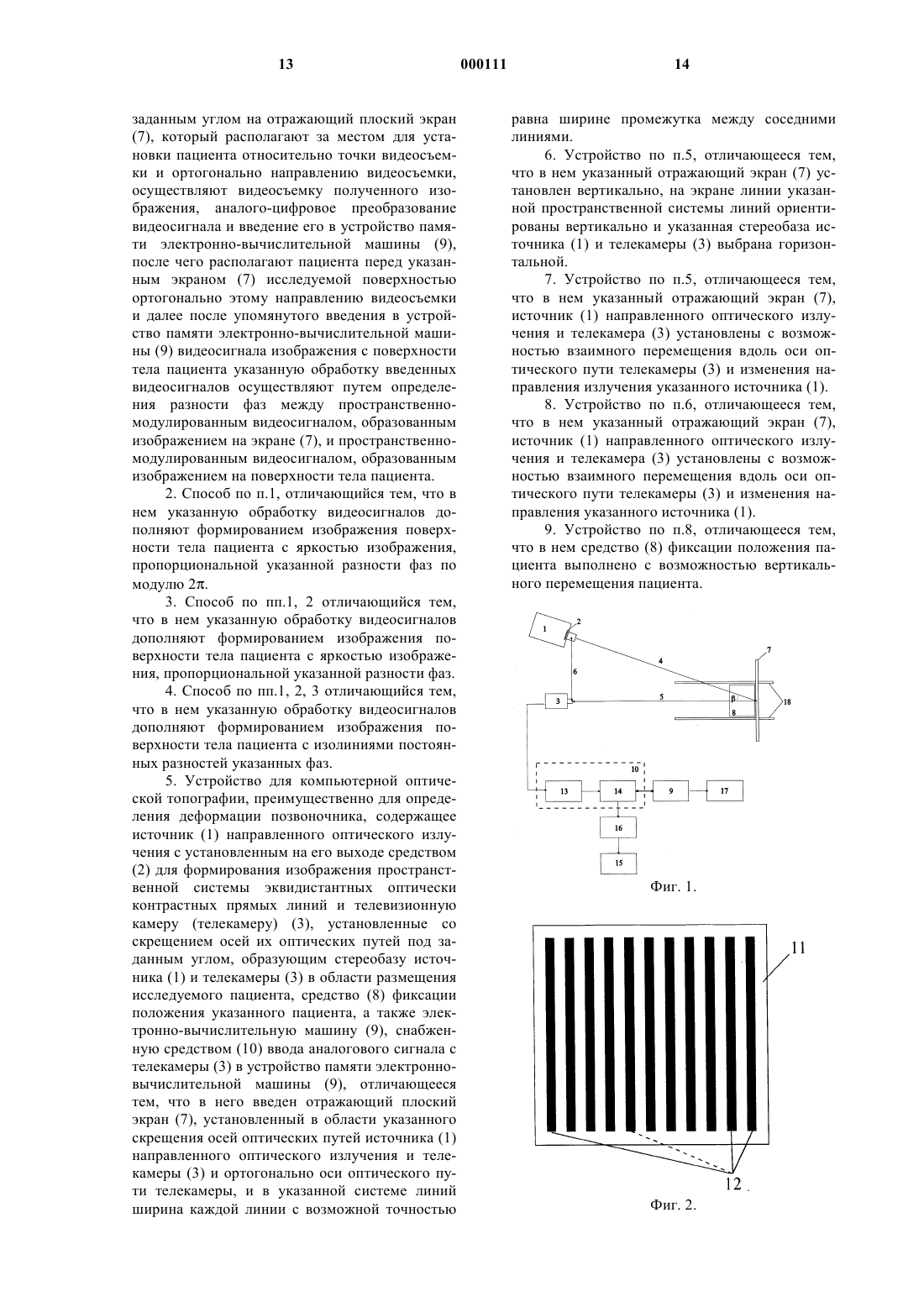
1 Изобретение относится к измерительной и регистрирующей медицинской технике, предназначенной для исследования и анализа формы тела человека в диагностических целях, в частности для определения деформации позвоночника. Существует проблема обследования тела человека или его частей для выявления отклонений от нормы, разрешение которой может быть осуществлено экспрессно, высокоинформативно, без вредных воздействий и аппаратурно коммерчески приемлемо. Это особенно актуально для обследования с целью выявления деформации позвоночника и его мониторинга. Известен способ для оптической топографии формы поверхности туловища и устройство для его осуществления на основе теневого муара [1], в соответствии с которыми используют пространственно полупрозрачный экран,имеющий чередующиеся прозрачные и непрозрачные полосы, ориентированные горизонтально или вертикально, источник мощного освещения, которым освещают экран и фотоаппарат. Пациента устанавливают за экраном и освещают через этот экран источником под определенным углом к экрану. Изображение тени от полос экрана совместно с изображением самих полос регистрируется под углом, отличным от указанного, фотоаппаратом или наблюдается невооруженным глазом. Суперпозиция деформированных пропорционально форме поверхности теневых полос и исходных полос экрана в результате механической интерференции создает изображение муаровой топограммы рельефа обследуемой поверхности. По изображению муаровых топограмм производится визуальное сравнение формы левой и правой половин поверхности спины, и наблюдаемая при этом асимметрия полос свидетельствует о ротации позвоночника, что является одним из признаков деформации позвоночника. Однако получаемая при этом оценка деформации позвоночника определяется квалификацией и опытом специалиста, поэтому имеет субъективный и качественный характер, являясь весьма приблизительной (асимметрия выявляется с точностью до одной полосы, цена которой по глубине рельефа обычно составляет 5 мм). Указанные недостатки существенно снижают возможность выявления начальных форм деформаций при скриниг-диагностике, а также не позволяют проводить количественное сопоставление результатов последовательных во времени обследований для мониторинга процесса развития деформации позвоночника. Многочисленные попытки специалистов решить проблему получения количественных оценок путем автоматизации процесса ввода и обработки муаровых топограмм на ЭВМ не дали удовлетворительных результатов. 2 Известен способ оптической топографии с использованием компьютера и устройство для его осуществления, использующий сканирование обследуемой поверхности проецируемой линией [2]. Устройство включает сканер, состоящий из проектора и телевизионной камеры(телекамеры) с зафиксированной взаимной ориентацией, так что их оптические оси образуют некоторый угол в вертикальной плоскости, и компьютер. Сканер имеет механизм, позволяющий ему поворачиваться в вертикальной плоскости вокруг горизонтальной оси. Обследуемый пациент устанавливается на определенном расстоянии спиной к сканеру и на него проецируется изображение светлой прямой линии, форма которой становится пропорциональной горизонтальному сечению поверхности спины. Изображение деформированной линии с помощью телекамеры вводится в компьютер, который по двум координатам этой линии в плоскости изображения с учетом известной ориентации сканера рассчитывает трехмерные координаты соответствующих точек поверхности. Последовательно меняя угол наклона сканера, вводится серия (50-100) изображений линии и по совокупности найденных точек поверхности путем интерполяции восстанавливается вся поверхность в целом, а по ней рассчитываются необходимые количественные характеристики. Основными недостатками способа и устройства являются длительное время сканирования, что существенно при обследовании живых объектов, низкая точность определения формы поверхности и большое время обработки данных для одного пациента (10 мин), что не позволяет использовать способ и устройство для решения задач скрининг-диагностики. Известен способ оптической топографии на основе кругового сканирования проецируемым вектором точек для получения полных сечений поверхности туловища на 10 уровнях и устройство [3] для его осуществления. Устройство включает компьютер, сканер, состоящий из оптической головки, неподвижную платформу для установки пациента и привод с сервомотором, посредством которого головка вращается вокруг платформы. Оптическая головка имеет 10 вертикально расположенных с интервалом 30 мм светоизлучающих диодов и включает приемную камеру на фоточувствительной линейке,регистрирующую под углом 28 градусов изображение спроецированных светодиодами точек. Обследуемый пациент устанавливается на платформу. Оптическая головка осуществляет вокруг него полный оборот на 360 градусов,регистрируя и передавая в компьютер изображения спроецированных на поверхность туловища точек для 100 положений головки. После обработки введенных данных компьютер определяет полные контуры сечений для 10 уровней туловища. 3 Основными недостатками данного устройства являются: низкое пространственное разрешение по вертикали (определяются только 10 круговых сечений с интервалом 30 мм), а также большое время сканирования (5 с.). Известен способ на основе проецирования матрицы точек и устройство [4] для его осуществления, содержащее проектор с прецизионным слайдом в виде матрицы эквидистантно расположенных точек, телекамеру, стойки для их размещения в пространстве, непрозрачный экран в виде эталонной плоской поверхности и компьютер с устройством ввода аналогового видеосигнала, поступающего с телекамеры. Обследуемый пациент устанавливается перед экраном спиной к проектору и на него под некоторым углом проецируется изображение матрицы точек, которое вводится посредством телекамеры в компьютер. Дополнительно вводится также изображение матрицы точек, спроецированных на эталонную поверхность. По двум этим изображениям компьютер выделяет пары идентичных точек, определяет их координаты в плоскости изображения на экране и рассчитывает посредством триангуляции третью координату - глубину поверхности для каждой спроецированной точки матрицы. Полная форма поверхности восстанавливается путем интерполяции. Основными недостатками данного устройства являются: недостаточное пространственное разрешение по горизонтали и вертикали, а также низкая точность определения формы поверхности. Наиболее близким к предлагаемому является способ компьютерной оптической топографии на основе проекции изображения линий и устройство [5] для его осуществления. Способ включает проецирование на обследуемую поверхность тела пациента системы горизонтально ориентированных эквидистантных линий приблизительно под прямым углом к исследуемой поверхности, видеосъемки изображения этой системы линий под острым углом, отличным от угла проецирования, аналого-цифровое преобразование этого сигнала изображения, введение его в устройство памяти ЭВМ и обработку путем определения координат каждой линии и расчета по этим координатам профиля соответствующего сечения обследуемой поверхности. Устройство для осуществления этого способа содержит проектор со слайдом в виде эквидистантных параллельных линий, телекамеру,ЭВМ с устройством для ввода, оцифровки и хранения изображений, поступающих с телекамеры и дополнительный видеомонитор. При этом оптическая ось проектора ориентирована горизонтально, проектор и телекамера установлены со скрещением их оптических осей в области размещения пациента и образуют вертикально ориентированную стереобазу. Способ и устройство основаны на эффекте деформации 4 изображения линий вследствие параллакса при съемке телекамерой под острым углом к исследуемой поверхности. Недостатками способа и устройства являются: недостаточное пространственное разрешение по вертикали, которое не превышает расстояния между соседними линиями изображения; недостаточная точность определения высоты поверхности; недостаточная скорость обработки изображения; наличие перспективных искажений вводимых в ЭВМ изображений из-за расположения телекамеры под острым углом к обследуемой поверхности, что приводит к ошибкам определения формы рельефа; отсутствие возможности перенастройки оптической схемы для адаптации ее к размеру туловища обследуемых пациентов. Перечисленные недостатки не позволяют использовать устройство для массовых скрининговых обследований и ограничивают его применение для динамических наблюдений. Задачей изобретения является создание способа компьютерной оптической топографии формы тела человека и устройства для его осуществления, преимущественно для определения деформации позвоночника человека, обладающих повышенной чувствительностью к асимметричности и рельефности обследуемой поверхности тела человека, обеспечивающих более экспрессное обследование и большую информативность и достоверность результатов, а также коммерчески более приемлемых. В соответствии с поставленной задачей предлагаемый способ компьютерной оптической топографии формы тела пациента, как и прототип, включает проецирование на обследуемую поверхность тела пациента под заданным углом к этой поверхности изображения пространственной системы эквидистантных оптически контрастных прямых линий, видеосъемку изображения этой системы линий под углом, отличным от указанного угла проецирования, аналого-цифровое преобразование сигнала изображения, введение его в устройство памяти электронно-вычислительной машины(ЭВМ) и обработку преобразованного сигнала для получения количественных параметров рельефа поверхности. В отличие от прототипа,предварительно изображение указанной системы линий, в которой ширина каждой линии равна ширине промежутка между соседними линиями с возможной точностью, проецируют под указанным заданным углом на отражающий плоский экран, который располагают за пациентом относительно точки видеосъемки и ортогонально направлению видеосъемки, осуществляют видеосъемку полученного изображения в отсутствие пациента, аналого-цифровое преобразование видеосигнала и введение его в устройство памяти ЭВМ, после чего располагают пациента перед указанным экраном исследуемой поверхностью ортогонально этому направ 5 лению видеосъемки и далее после указанного введения в устройство памяти ЭВМ видеосигнала изображения с поверхности тела пациента указанную обработку введенных в устройство памяти ЭВМ видеосигналов осуществляют путем определения разности фаз между пространственно-модулированным видеосигналом изображения на экране и пространственно - модулированным видеосигналом изображения на поверхности тела пациента. Предпочтительно указанную обработку видеосигнала дополнить формированием изображения поверхности тела пациента с яркостью изображения, пропорциональной указанной разности фаз по модулю 2. Такое изображение дидактично и наглядно эффективно демонстрирует ряд раздельно воспринимаемых областей на исследуемой поверхности, в каждой из которых разность фаз изменяется в пределах 2. Последовательность размещения этих областей демонстрирует изменение высоты рельефа за пределами 2, а их форма и соотношение их форм демонстрирует конфигурацию изменения высоты исследуемой поверхности над экраном. По другому или указанному предпочтению целесообразно упомянутую обработку видеосигналов дополнить формированием изображения поверхности тела пациента с яркостью изображения, пропорциональной полной разности фаз. Такое изображение демонстрирует высоту рельефа исследуемой поверхности в каждой ее точке в виде непрерывного и плавного изменения его яркости по поверхности изображения. Предпочтительно также вышеуказанную обработку видеосигналов, равно как и приведенные предпочтения дополнить формированием изображения исследуемой поверхности тела пациента с изолиниями постоянных разностей указанных фаз. Такое изображение демонстрирует рельеф поверхности в изолиниях ее высоты. В соответствии с поставленной задачей предлагаемое устройство для компьютерной оптической топографии содержит общие с прототипом источник направленного оптического излучения с установленным на его выходе средством для формирования изображения пространственной системы эквидистантных оптически контрастных прямых линий и телекамеру,установленные со скрещением их оптических путей под заданным углом, образующим стереобазу источника и телекамеры, в области размещения исследуемого пациента, средство фиксации положения пациента, а также персональную электронно-вычислительную машину(ЭВМ), снабженную средством ввода в ЭВМ аналогового сигнала с телекамеры. Предлагаемое устройство для компьютерной оптической топографии отличается от прототипа тем, что в него введен отражающий плоский экран, уста 000111 6 новленный в области указанного скрещения осей оптических путей источника направленного оптического излучения и телекамеры, ортогонально оси оптического пути телекамеры, в указанной системе линий ширина каждой линии с возможной точностью равна ширине промежутка между соседними линиями, и они ориентированы поперечно указанной стереобазе. Целесообразно устанавливать указанный отражающий экран вертикально, ориентировать систему оптически контрастных линий на экране также вертикально, а указанную стереобазу ориентировать горизонтально. Такое пространственное и взаимное расположение экрана, системы оптически контрастных линий и стереобазы, источника света и телекамеры обеспечивает сочетание простого, относительно свободного и естественного расположения пациента в положении стоя с вышеуказанными преимуществами предлагаемого устройства для топографии по чувствительности, экспрессности, информативности и достоверности результатов обследования. Предпочтительно установить отражающий экран, с одной стороны, источник направленного оптического излучения и телекамеру, с другой стороны, с возможностью их взаимного перемещения вдоль оси оптического пути телекамеры и возможностью изменения направления излучения указанного источника. Такое решение позволяет регулировать чувствительность и разрешающую способность предлагаемого устройства для топографии при заданном числе чередующихся по оптической плотности полос путем изменения угла их проецирования на экран и на тело пациента. Когда последнее предпочтение выбрано при вышеуказанном вертикальном расположении экрана и системы линий на нем и горизонтальном расположении стереобазы, то целесообразно средство фиксации пациента выполнить с возможностью вертикального перемещения пациента. Это позволяет оптимизировать разрешающую способность предлагаемого топографа в зависимости от роста пациента (ребенок, взрослый пациент). В альтернативном или сочетанном предпочтении источник направленного оптического излучения и/или телекамера содержат объектив со средством для изменения размеров изображения. Это позволяет оптимизировать размеры индикативного поля, образованного изображением указанной системы линий, и степень его информативности. На фиг. 1 показана блок-схема предлагаемого устройства для компьютерной оптической топографии в соответствии с изобретением в предпочтительном воплощении, характеризующим также и предлагаемый способ компьютерной оптической топографии формы тела человека. 7 На фиг. 2 показано средство для формирования изображения пространственной системы эквидистантных оптически контрастных полос,выполненное в виде оптически прозрачной пластины с непрозрачным покрытием в форме параллельных одинаковых полос, ширина каждой из которых равна ширине промежутка между соседними из них. На фиг. 3 показаны следующие изображения, иллюстрирующие предлагаемый способ и устройство на примере обследования формы поверхности спины: на фиг. 3 а - изображение регулярной системы чередующихся по оптической плотности полос одинаковой ширины, спроецированной на поверхности спины пациента и отражающего экрана, расположенного за пациентом; на фиг. 3b - фазояркостная топограмма поверхности спины пациента в виде пространственной последовательности областей, ограниченных набегом фазы 2, внутри которых яркость изображения пропорциональна разности фаз; на фиг. 3 с - фазояркостная топограмма поверхности спины, на которой яркость изображения пропорциональна полной разности фаз в каждой точке поверхности, показанной на фиг. 3 а и 3b; на фиг. 3d - фазовая топограмма формы поверхности в виде пространственной последовательности изолиний заданных постоянных разностей фаз, эквивалентных изолиниям равной высоты обследуемой поверхности относительно экрана. Возможность осуществления предлагаемого способа компьютерной оптической топографии формы тела пациента и устройства для его осуществления поясняется на примере предпочтительного выполнения устройства, описания его работы и применения. Устройство (фиг. 1) для компьютерной оптической топографии содержит источник 1 направленного оптического излучения с установленным на его выходе средством 2 формирования изображения регулярной пространственной системы эквидистантных оптически контрастных прямых линий с шириной каждой линии,равной ширине промежутка между линиями, и телекамеру 3, установленные со скрещением осей 4 и 5 их оптических путей под заданным углом , образующим стереобазу 6 источника 1 и телекамеры 3. В области скрещения осей 4 и 5 оптических путей источника 1 и телекамеры 3 вертикально установлен плоский отражающий экран 7, ориентированный ортогонально оси 5 оптического пути телекамеры 3. Устройство имеет средство 8 фиксации положения пациента перед экраном 7. Устройство содержит также ЭВМ 9 в стандартной конфигурации, например 8 Указанное средство 2 для формирования изображения системы оптически контрастных прямых линий, в частности, выполнено в виде оптически прозрачной пластины 11 (например из стекла) (фиг. 2), на поверхность которой нанесено непрозрачное покрытие 12 (например,путем металлизации поверхности), в виде эквидистантных одинаковых прямых полос с шириной, равной ширине промежутка между ними. Пластина 11 установлена в задней фокальной плоскости объектива (не показан) источника 1 так, чтобы оптически контрастные линии проецировались на экран 7 вертикально, при этом стереобаза 6 источника 1 и телекамеры 3 ориентирована горизонтально. Для юстировки изображения на экране 7 источник 1 направленного оптического излучения снабжен световой указкой, выполненной,например, в виде оптически контрастной точки в центре пластины 11 или пластины-аналога по форме и размерам. Средство 10 ввода видеосигнала с телекамеры 3 в ЭВМ 9 выполнено в виде последовательно соединенных аналого-цифрового преобразователя 13 (фиг. 1), подключенного входом к выходу телекамеры 3, и оперативного запоминающего устройства (ОЗУ) 14. Для удобства применения предлагаемое устройство для компьютерной оптической топографии содержит последовательно соединенные дополнительный видеомонитор 15 и цифро-аналоговый преобразователь 16, подключенный к ОЗУ 14, и печатающее устройство 17, подключенное к ЭВМ 9,которые, однако, необязательны. Отражающий экран 7, с одной стороны, а также источник 1 направленного оптического излучения и телекамера 3, с другой стороны,установлены с возможностью взаимного перемещения вдоль оси 5 оптического пути телекамеры 3. Это осуществлено, например, с помощью двух рельсов 18, размещенных на полу параллельно оси 5, на которых подвижно установлен экран 7 и фиксаторов (не показаны) ряда заданных положений экрана 7. При этом юстировка изображения от средства 2 осуществляется возможностью поворота источника 1, то есть изменением угла . Таким образом осуществлена возможность регулировки размеров изображения системы оптически контрастных линий на экране 7 с тем, чтобы оно соответствовало размерам обследуемой поверхности тела пациента и, следовательно, было полностью информативным. Дополнительная возможность регулировки информативности изображения, формируемого средством 2, обеспечена средствами для изменения размеров изображения в объективе источника 1 и в объективе телекамеры 3,которые могут быть традиционными элементами изменения фокусного расстояния объектива. Средство 8 для фиксации положения пациента выполнено в виде регулируемой по высоте от пола платформы (не показана) с площадкой 9 для стоп, выверенной горизонтально и снабженной ограничителями местоположений стоп пациента, и жестко соединенного с площадкой фиксатора (не показан) вертикальной неподвижности туловища в виде трубчатого вертикального штатива, на котором закреплен горизонтальный кронштейн, установленный с возможностью перемещения вдоль штатива. Перед осуществлением способа выполняют оптическую настройку устройства (фиг. 1). По приблизительно известным размерам обследуемой поверхности пациента (например, спины) выбирают местоположение отражающего экрана 7 вдоль рельсов 18 и путем настройки объектива источника 1 на экран 7 проецируют четкое изображение сформированной с помощью пластины 11 системы оптически контрастных вертикальных линий, несколько превышающее указанные ожидаемые размеры обследуемой поверхности. С помощью указанной световой указки совмещают центр изображения,проецируемого источником 1, с центром экрана 7. Если при этом ось 5 оптического пути телекамеры 3 также совмещена с центром экрана 7,а экран 7 ориентирован ортогонально оси 5, то настройку считают законченной и далее пространственная ориентация и местоположение источника 1, телекамеры 3 и экрана 7 остаются неизменными. Значение известного при этом угламежду осями 4 и 5 вводят в устройство памяти ЭВМ 9, например, с помощью ее блока клавиатуры (не показан). Способ и работа устройства далее описаны на примере исследования формы спины пациента. Предварительно с помощью источника 1 и установленной на его выходе прозрачной пластины 11 с непрозрачным покрытием 12 проецируют на экран 7 изображение вертикальных,одинаковых, прямых, параллельных полос, чередующихся по оптической плотности. С помощью телекамеры 3 осуществляют видеосъемку этого изображения под прямым углом к поверхности экрана 7, полученный таким образом пространственно-модулированный видеосигнал поступает на вход АЦП 13, где преобразуется в цифровой, и далее записывается в ОЗУ 14 и устройство памяти ЭВМ 9. Указанные действия(операции) могут быть осуществлены однажды и предварять обследование ряда пациентов. После этого устанавливают пациента на платформу лицом к экрану 7 и в непосредственной близости к нему в положении свободного вертикального равновесия (руки свободно опущены, носки и пятки стоп выровнены и т.п.). Перемещают указанный кронштейн, установленный на вышеупомянутом вертикальном штативе на уровень груди пациента и закрепляют его так, чтобы он касался поверхности груди. На поверхность спины, ориентированной при этом параллельно экрану 7, с помощью источника 1 и установленной на его выходе прозрачной пла 000111 10 стины 11 с полосчатым непрозрачным покрытием 12 проецируют указанную систему оптически контрастных линий. Пациент фиксирует в указанном положении состояние полной неподвижности в течение 1 - 2 с. В этот период изображение системы этих линий (фиг. 3 а), деформированных соответственно форме рельефа поверхности, снимают телекамерой 3. Полученный видеосигнал имеет амплитуду, изменяющуюся в соответствии с яркостью изображения,модулирован по фазе в соответствии с деформацией контрастных линий и описывается выражением:I(х,у) - регистрируемая телекамерой 3 интенсивность изображения системы линий на экране 7 в координатах х, у; В(х,у) - фоновая составляющая; А(х,у) - амплитуда яркости системы линий;f - пространственная частота расположения линий (количество линий на единицу длины); Ф(х,у) - модуляция пространственной фазы линий, вносимая рельефом обследуемой поверхности. Этот сигнал также поступает на вход АЦП 13, далее в ОЗУ 14 и устройство памяти ЭВМ 9. Программно ЭВМ 9 производит фазовое детектирование видеосигнала изображения на экране 7 и видеосигнала изображения на обследуемой поверхности тела пациента, и вычисление разности фаз этих видеосигналов. Использование такой разности фаз позволяет избавиться от искажений, обусловленных тем, что ось 4 оптического пути источника 1 не ортогональна плоскости экрана 7, а также от инструментальных погрешностей, обусловленных неточностью пространственной ориентации пластины 11 при ее установке в источник 1. Высота поверхности относительно плоскости экрана 7 в точке координатами х, у Н(х,у) связана с фазовым сдвигом линий Ф(х,у) из-за их деформации выражением: Н(х,у) = LФ(x,y)/(2Df-Ф(х,у,гдеL - расстояние от экрана 7 до телекамеры 3,D - расстояние между источником 1 и телекамерой 3 (стереобаза). Далее ЭВМ 9 программно выделяет из изображения системы оптически контрастных линий на обследуемой поверхности контур спины в проекции, ортогональной к экрану 7, то есть область, в пределах которой формируют следующий ряд изображений: 1. В виде топограммы, яркость изображения которой пропорциональна разности фаз по модулю 2. Такая топограмма содержит ряд раздельных областей, в каждой из которых разность фаз меняется в пределах 2 (фиг. 3b). Топограмма демонстрирует высоту рельефа поверхности относительно экрана 7 в областях,ограниченных изменением разности фаз на 2. 11 2. В виде топограммы, яркость изображения которой пропорциональна полной разности фаз (фиг. 3 с). Такая топограмма менее контрастна, чем изображенная на фиг. 3b, так как шкала яркости используется в пределах всей топограммы, но более удобна для общего анализа рельефа поверхности. 3. В виде изолиний постоянных разностей фаз с заданным шагом. Так как разность фаз связана с высотой поверхности относительно экрана 7, такая топограмма демонстрирует рельеф поверхности в изолиниях ее высоты с шагом,кратным целым метрическим единицам, например целому числу миллиметров. Указанные изображения хранят в устройстве памяти ЭВМ 9 в виде файлов. Их воспроизводят на дополнительном видеомониторе 15 или видеомониторе ЭВМ 9 раздельно или одновременно. Изображения при необходимости могут быть распечатаны на печатающем устройстве 17, подключенном к ЭВМ 9. Приведенные топограммы могут использоваться для целей диагностики как раздельно,так и совокупно, путем сопоставительного анализа. При визуальном анализе первые две топограммы (фиг. 3b и 3 с) наиболее информативны качественно, а последняя (фиг. 3d) наиболее информативна количественно. Шаг полос на экране 7 определяет разрешающую способность предлагаемого изобретения, пределом точности определения высоты рельефа высоты обследуемой поверхности является разрешающая способность телекамеры 3. При этом шаг полос и соответственно разрешающую способность можно изменять путем выбора пластины 11 с заданным шагом нанесенных непрозрачных полос 12 из набора таких пластин и/или путем изменения размера изображения системы оптически контрастных линий на экране 7 при указанной выше настройке,когда экран 7 перемещают вдоль рельсов 18 и/или изменяют фокусное расстояние объективов источника и телекамеры. Это особенно важно при обследовании пациентов различного роста, включая детей 3 - 5 лет. На топограммах поверхности туловища средних размеров, полученных в соответствии с предлагаемым способом и устройством, шаг изолиний (по высоте) равен 3 мм, то есть точность измерений превышает известные способы. Интерпретация топограммы дополняется программным графическим построением и анализом профилей любых сагиттальных и горизонтальных сечений обследуемой поверхности,выбираемых интерактивно. Программное обеспечение, созданное на основе указанной совокупности признаков предлагаемого способа и устройства для его осуществления позволяет выполнить расчеты и графические построения пространственной формы дорсальной поверхности туловища, описывающие количественно характер, степень ее 12 деформации и асимметрии, а также пространственной формы определяющей костной структуры туловища - позвоночного столба, линии центров масс позвонков, ее фронтальной, сагиттальной и горизонтальной проекций и расчет отдельных параметров формы линии позвоночного столба, коррелирующих с рентгенологическими параметрами, например угла Кобба. Изобретение обеспечивает короткий период экспозиции, сопоставимый с наиболее экспрессным из известных методов - методом муаровой топографии. Компьютерная ориентированность индикативного изображения системы оптически контрастных одинаковых по ширине полос, проецируемых на обследуемую поверхность, в сочетании с направлением видеосъемки этого изображения, ортогональным к этой поверхности,позволяет получить пространственномодулированный видеосигнал, пригодный и удобный для фазометрической обработки программно с помощью ЭВМ. Такая обработка малочувствительна к неизбежным амплитудным искажениям. Следствием этой обработки являются результаты в виде топограмм, различных профилей и т.п., которые хорошо документируемы, пригодны для воплощения в твердые копии, высокоиформативны и наглядны. Предлагаемое техническое решение коммерчески более приемлемо, так как при равной с прототипом стоимости аппаратурного обеспечения оно обладает более высокой пропускной способностью. Полное время обследования спины пациента (включая подготовку пациента и обработку видеосигнала изображения в ЭВМ) не превышает 5 мин. Изобретение пригодно также для исследования и анализа формы лица, груди и других частей тела человека для целей диагностики,планирования и контроля результатов хирургических операций. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ компьютерной оптической топографии формы тела человека (пациента) путем проецирования на обследуемую поверхность тела под заданным углом к этой поверхности изображения пространственной системы эквидистантных оптически контрастных прямых линий, видеосъемки изображения этой системы линий под углом, отличным от указанного угла проецирования, аналого-цифровое преобразование видеосигнала изображения, введение его в устройство памяти электронно-вычислительной машины (9) и обработку преобразованного сигнала для получения количественных параметров рельефа поверхности, отличающийся тем, что предварительно указанную систему линий, в которой ширина каждой линии равна ширине промежутка между соседними линиями с возможной точностью, проецируют под указанным 13 заданным углом на отражающий плоский экран(7), который располагают за местом для установки пациента относительно точки видеосъемки и ортогонально направлению видеосъемки,осуществляют видеосъемку полученного изображения, аналого-цифровое преобразование видеосигнала и введение его в устройство памяти электронно-вычислительной машины (9),после чего располагают пациента перед указанным экраном (7) исследуемой поверхностью ортогонально этому направлению видеосъемки и далее после упомянутого введения в устройство памяти электронно-вычислительной машины (9) видеосигнала изображения с поверхности тела пациента указанную обработку введенных видеосигналов осуществляют путем определения разности фаз между пространственномодулированным видеосигналом, образованным изображением на экране (7), и пространственномодулированным видеосигналом, образованным изображением на поверхности тела пациента. 2. Способ по п.1, отличающийся тем, что в нем указанную обработку видеосигналов дополняют формированием изображения поверхности тела пациента с яркостью изображения,пропорциональной указанной разности фаз по модулю 2. 3. Способ по пп.1, 2 отличающийся тем,что в нем указанную обработку видеосигналов дополняют формированием изображения поверхности тела пациента с яркостью изображения, пропорциональной указанной разности фаз. 4. Способ по пп.1, 2, 3 отличающийся тем,что в нем указанную обработку видеосигналов дополняют формированием изображения поверхности тела пациента с изолиниями постоянных разностей указанных фаз. 5. Устройство для компьютерной оптической топографии, преимущественно для определения деформации позвоночника, содержащее источник (1) направленного оптического излучения с установленным на его выходе средством(2) для формирования изображения пространственной системы эквидистантных оптически контрастных прямых линий и телевизионную камеру (телекамеру) (3), установленные со скрещением осей их оптических путей под заданным углом, образующим стереобазу источника (1) и телекамеры (3) в области размещения исследуемого пациента, средство (8) фиксации положения указанного пациента, а также электронно-вычислительную машину (9), снабженную средством (10) ввода аналогового сигнала с телекамеры (3) в устройство памяти электронновычислительной машины (9), отличающееся тем, что в него введен отражающий плоский экран (7), установленный в области указанного скрещения осей оптических путей источника (1) направленного оптического излучения и телекамеры (3) и ортогонально оси оптического пути телекамеры, и в указанной системе линий ширина каждой линии с возможной точностью 14 равна ширине промежутка между соседними линиями. 6. Устройство по п.5, отличающееся тем,что в нем указанный отражающий экран (7) установлен вертикально, на экране линии указанной пространственной системы линий ориентированы вертикально и указанная стереобаза источника (1) и телекамеры (3) выбрана горизонтальной. 7. Устройство по п.5, отличающееся тем,что в нем указанный отражающий экран (7),источник (1) направленного оптического излучения и телекамера (3) установлены с возможностью взаимного перемещения вдоль оси оптического пути телекамеры (3) и изменения направления излучения указанного источника (1). 8. Устройство по п.6, отличающееся тем,что в нем указанный отражающий экран (7),источник (1) направленного оптического излучения и телекамера (3) установлены с возможностью взаимного перемещения вдоль оси оптического пути телекамеры (3) и изменения направления указанного источника (1). 9. Устройство по п.8, отличающееся тем,что в нем средство (8) фиксации положения пациента выполнено с возможностью вертикального перемещения пациента.
МПК / Метки
МПК: A61B 5/103
Метки: осуществления, формы, топографии, компьютерной, устройство, тела, человека, оптической, способ
Код ссылки
<a href="https://eas.patents.su/9-111-sposob-kompyuternojj-opticheskojj-topografii-formy-tela-cheloveka-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Евразийского Союза">Способ компьютерной оптической топографии формы тела человека и устройство для его осуществления</a>
Способ изготовления литьевой заготовки в вакуумной камере и устройство для осуществления этого способа.
Номер патента: 40
Опубликовано: 26.02.1998
Авторы: Контер Максим Лианович, Лубенец Владимир Платонович, Кац Эдуард Лейбович, Реслер Йоахим
МПК: B22D 27/04
Метки: способа, вакуумной, камере, литьевой, способ, этого, изготовления, заготовки, устройство, осуществления
Формула / Реферат:
1. Способ изготовления литьевой заготовки в вакуумной камере (2) путем подачи жидкого сплава в литейную форму и перемещения вместе с нею из нагреваемой камеры в охлаждающую камеру, где сплав направленно затвердевает, причем нагреваемая камера отделена от охлаждающей камеры экраном, в котором выполнено отверстие, отличающийся тем, что литейную форму под экраном (3) дополнительно охлаждают снаружи потоком газа. 2. Способ по п.1, отличающийся тем,...
Способ электрохимической обработки биполярными импульсами, и устройство для его осуществления
Номер патента: 69
Опубликовано: 25.06.1998
Авторы: Мухутдинов Рафаил Рамзисович, Гимаев Назич Зиятдинович, Агафонов Игорь Леонидович, Куценко Виктор Николаевич, Зайцев Александр Николаевич, Амирханова Наила Анваровна, Белогородский Александр Леонидович
МПК: B23H 3/02
Метки: электрохимической, устройство, импульсами, осуществления, обработки, способ, биполярными
Формула / Реферат:
1. Способ электрохимической обработки электропроводной детали (2) в электролите путем подачи биполярных импульсов между деталью и электропроводным электродом (6), в котором один или более токовых импульсов нормальной полярности чередуют с импульсами напряжения обратной полярности, отличающийся тем, что амплитуду (Un) импульсов напряжения регулируют между двумя заранее заданными величинами (Un1, Un2), которые определяют по заданному качеству...
Способ контроля газопроводящих трубопроводов и устройство для его осуществления
Номер патента: 35
Опубликовано: 26.02.1998
Автор: Гоедеке Хартмут
МПК: G01N 29/00
Метки: устройство, осуществления, контроля, газопроводящих, способ, трубопроводов
Формула / Реферат:
1. Способ контроля газопроводящих трубопроводов ультразвуковым методом с помощью устройства с ультразвуковыми чувствительными элементами, располагаемыми в трубопроводе, заполненном контактной жидкостью, отличающийся тем, что в зоне расположения чувствительных элементов в контактной жидкости создают избыточное давление. 2. Устройство для контроля газопроводящих трубопроводов, содержащее ультразвуковые чувствительные элементы, переднее и заднее...
Способ преобразования тепла в полезную энергию и устройство для его осуществления.
Номер патента: 58
Опубликовано: 30.04.1998
Авторы: Роудз Лоренс Б., Калина Александр И.
МПК: F01K 25/06
Метки: устройство, полезную, тепла, способ, преобразования, осуществления, энергию
Формула / Реферат:
1. Способ преобразования тепла в полезную энергию, содержащий следующие стадии: расширение первичной текучей среды в парообразном состоянии в расширителе первой ступени для получения полезной энергии и потока частично расширенной первичной текучей среды, имеющей паровую и жидкую компоненты, разделение потока частично расширенной первичной текучей среды на жидкую и паровую компоненты и разделения указанного потока на поток пара и поток,...
Способ вихревого измельчения материала и газодинамическое устройство для его осуществления
Номер патента: 4
Опубликовано: 30.09.1997
Авторы: Размаитов Владимир Иванович, Фатеев Александр Николаевич
МПК: B02C 19/06
Метки: способ, осуществления, измельчения, устройство, материала, вихревого, газодинамическое
Формула / Реферат:
1. Способ вихревого измельчения материала, включающий подачу диспергируемого материала в помольную камеру газодинамического устройства, ввод струй энергоносителя под углом к соответствующему радиусу зоны измельчения помольной камеры с образованием высокоскоростного вихря и вывод целевого продукта, отличающийся тем, что перед вводом струй энергоносителя в зону измельчения помольной камеры их направляют в соосно расположенные резонаторы и создают...