Способ ослабления поверхностной волны
Формула / Реферат
1. Способ ослабления поверхностной волны в сигналах сейсмических данных, содержащий этапы
получения сигналов сейсмических данных от ближних сейсмических датчиков,
оценки дифференциального ухода поверхностной волны между сейсмическими датчиками,
создания разностного фильтра, учитывающего дифференциальный уход поверхностной волны между сейсмическими датчиками, и
применения этого разностного фильтра к сигналам сейсмических данных для образования сигнала сейсмических данных с ослабленной поверхностной волной.
2. Способ по п.1, в котором разностный фильтр имеет форму

где S - сигнал сейсмических данных с ослабленной поверхностной волной, G - поверхностная волна, R1 и R2 - сигналы сейсмических данных от ближних сейсмических датчиков, zn - коэффициент временной задержки, связанный с дифференциальным уходом поверхностной волны, а d - коэффициент стабилизации.
3. Способ по п.2, в котором коэффициент стабилизации d составляет приблизительно 0,95.
4. Способ по п.1, в котором сигналы сейсмических данных принимают от K ближних сейсмических датчиков, где K является целым числом, большим или равным 3, и в котором дифференциальные уходы поверхностной волны оценивают для N доминирующих скоростей поверхностной волны, где N является целым числом, меньшим или равным K минус 1.
5. Способ по п.4, в котором поверхностную волну с N доминирующими скоростями поверхностной волны удаляют из сигналов сейсмических данных, полученных от K ближних сейсмических датчиков в операции одноходовой фильтрации, и эта операция одноходовой фильтрации производит сигнал сейсмических данных с ослабленной поверхностной волной в качестве выходного сигнала.
6. Способ по п.4, в котором K превышает N плюс 1, и для образования упомянутого сигнала сейсмических данных с ослабленной поверхностной волной используют подбор методом наименьших квадратов.
7. Способ по п.1, в котором разностные фильтры создают для N доминирующих скоростей поверхностной волны, где N больше или равно 2, и каждый разностный фильтр применяют к сигналам сейсмических данных каскадным многопроходным способом для оценки и удаления поверхностной волны на каждой из N доминирующих скоростей поверхностной волны.
8. Способ по п.1, в котором сигналы сейсмических данных откорректированы для нормального ухода до создания разностного фильтра.
9. Способ по п.1, в котором сигналы сейсмических данных статически откорректированы до создания разностного фильтра.
10. Способ по п.1, в котором сигналы сейсмических данных нормализованы по амплитуде до создания разностного фильтра.
11. Способ по п.1, в котором сигналы сейсмических данных отфильтрованы по частоте до создания разностного фильтра.
12. Способ по п.1, в котором для создания разностного фильтра используют коэффициенты в дополнение к оценке дифференциального ухода поверхностной волны и коэффициент стабилизации.
13. Способ по п.1, в котором регистрируют меньше, чем все сигналы сейсмических данных от ближних сейсмических датчиков, и зарегистрированные сигналы сейсмических данных с ослабленной поверхностной волной обеспечивают возможность восстанавливать незарегистрированные сигналы сейсмических данных от ближних сейсмических датчиков.
14. Способ по п.1, в котором ближние сейсмические датчики имеют разнесение, приблизительно равное более низкому значению из (0,05*n 1)/f0 и (0,95*n 0) /f1, где n 1 является самой высокой скоростью поверхностной волны, подлежащей ослаблению, f0 - самая низкая частота поверхностной волны, подлежащей ослаблению, n 0 - самая низкая скорость поверхностной волны, подлежащей ослаблению, а f1 - самая высокая частота поверхностной волны, подлежащей ослаблению.
15. Способ по п.1, в котором оценка дифференциального ухода поверхностной волны является частотно-зависимой и соответствующую дисперсионную скорость поверхностной волны получают путем выполнения анализа скорости, используя этапы определения соответствующего конуса поверхностной волны, выбора данных внутри конуса поверхностной волны, деления сигналов сейсмических данных на частотные полосы, для каждой частотной полосы исследования диапазона скоростей, применения линейного ухода к сигналам сейсмических данных, используя конкретную скорость, проверки всех скоростей в диапазоне, выбора конкретной скорости, которая обеспечивает самую высокую когерентность между сигналамисейсмических данных и завершения испытания для каждой из частотных полос.
16. Способ по п.1, в котором разностный фильтр является фильтром частотной области.
17. Способ по п.1, в котором оценку поверхностной волны выводят и используют для целей управления качеством или в последующих процессах удаления поверхностной волны.
18. Способ по п.1, в котором ближние сейсмические датчики автоматически выбирают на основании их расстояний разнесения.
19. Способ по п.1, в котором сигнал сейсмических данных с ослабленной поверхностной волной сравнивают с альтернативным сигналом сейсмических данных, и альтернативный сигнал сейсмических данных используют вместо сигнала сейсмических данных с ослабленной поверхностной волной при последующей обработке данных, если удовлетворяются определенные критерии выбора.

Текст
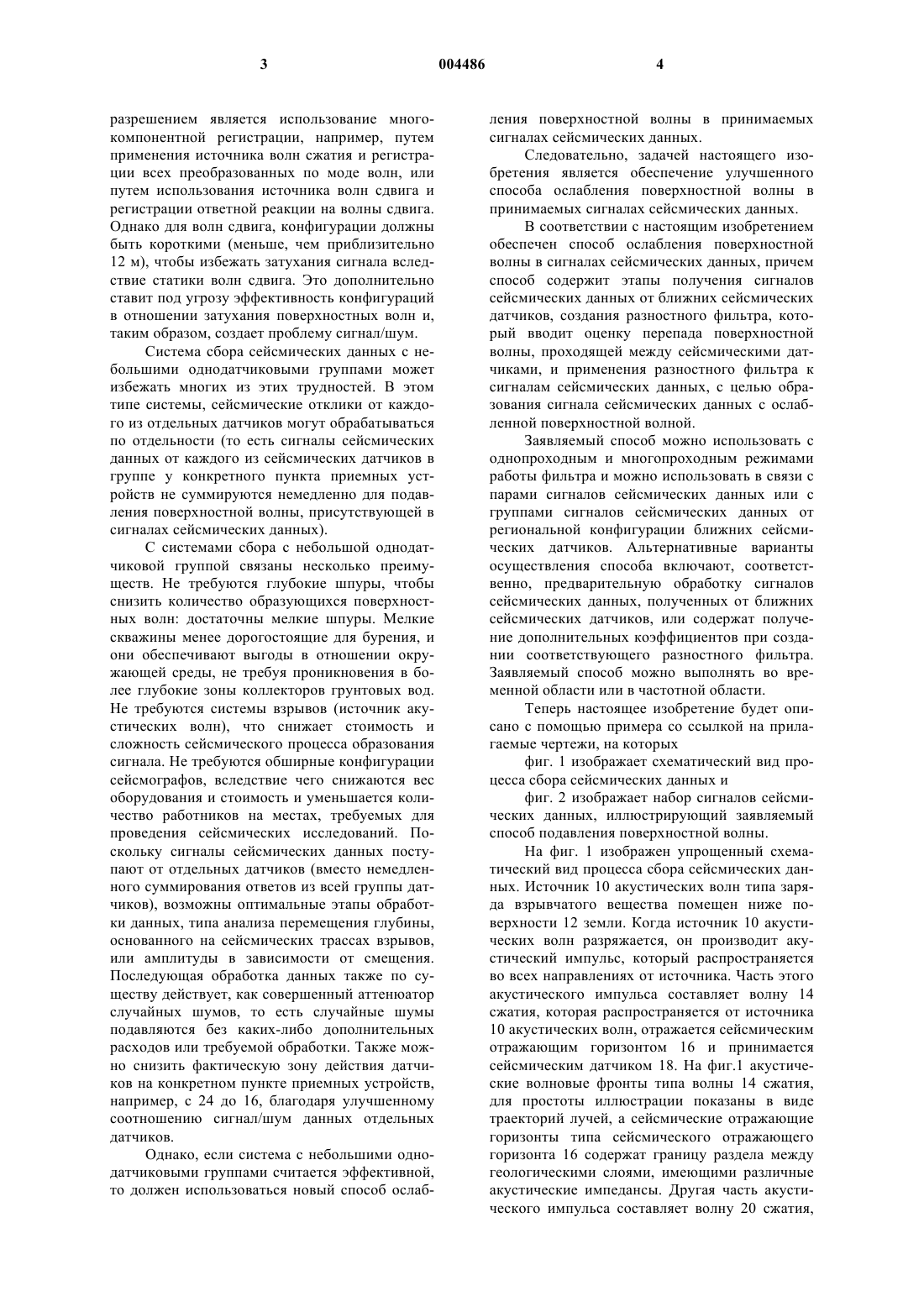
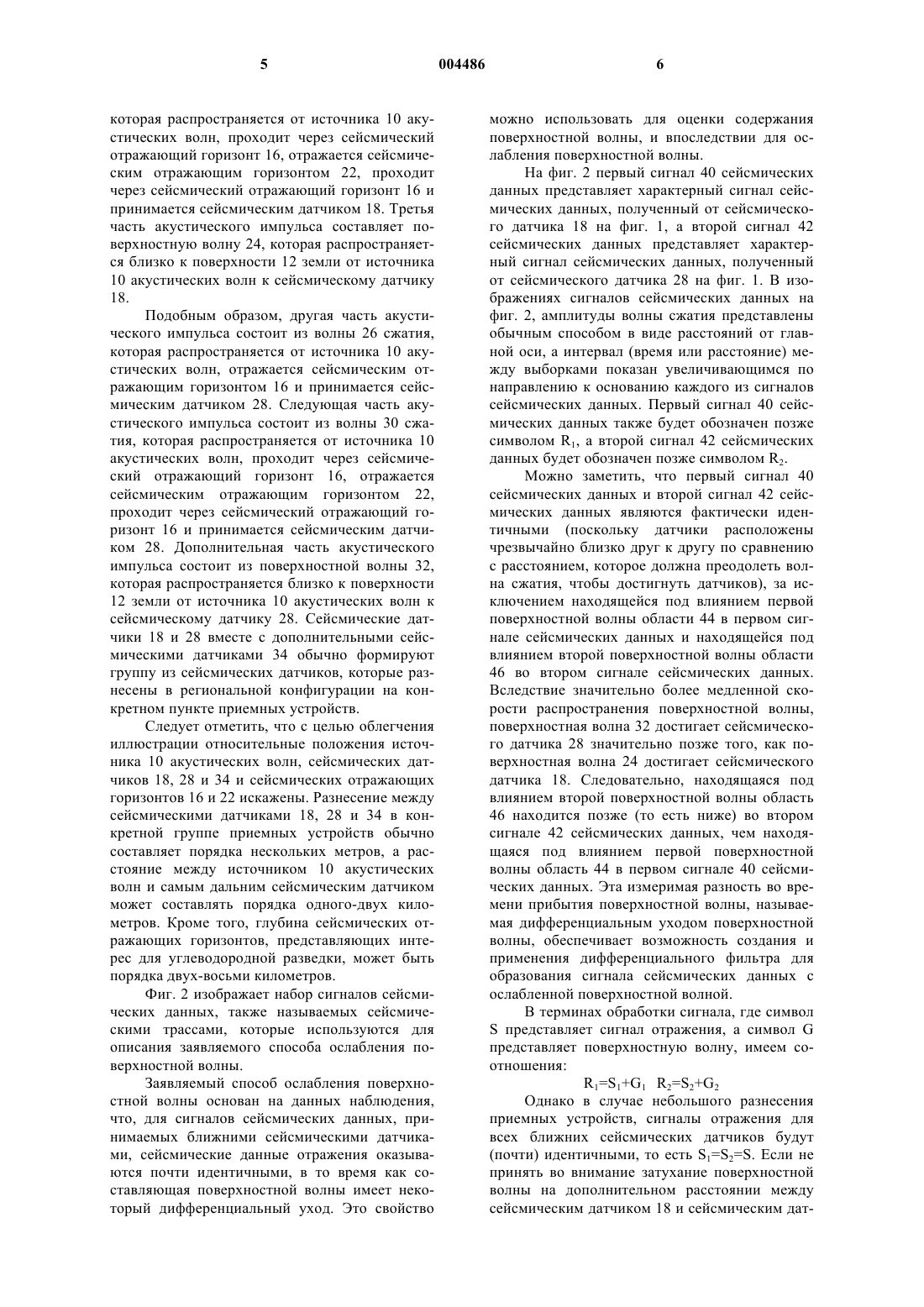
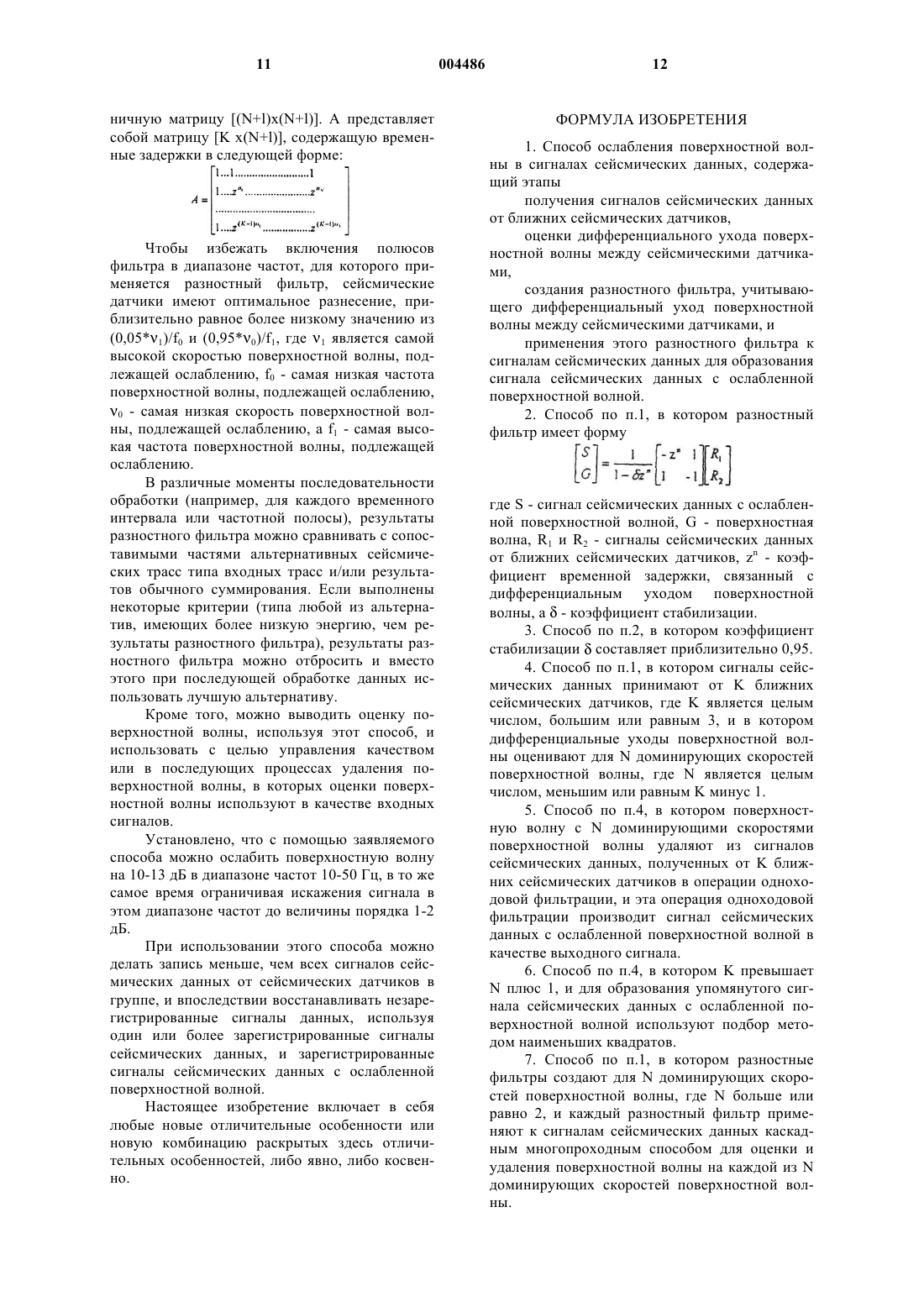
1 Настоящее изобретение касается способа ослабления поверхностной волны в сигналах сейсмических данных. Способ может создавать сигналы сейсмических данных с ослабленной поверхностной волной, которые обеспечивают более ясное представление об основной геологической структуре. Способ особенно подходит для использования с системами сбора сейсмических данных, имеющими маленькие однодатчиковые группы приемных устройств, где поверхностная волна не может быть ослаблена путем суммирования. Сигналы сейсмических данных собирают в условиях дистанционного подземного зондирования, особенно в связи с разведкой и производством углеводородов типа нефти и природного газа. Для сбора сейсмических данных обычно используют источники акустических волн типа взрывчатых веществ, пневмопушек или вибраторов, чтобы произвести акустический сигнал,который передается через геологические формации. Изменения акустического импеданса между различными геологическими пластами вызывают отражение части акустической энергии и возвращение к поверхности земли. Эти отраженные сигналы принимаются сейсмическими датчиками и обрабатываются, с целью создания геологических карт подземной геологии. Большую часть сейсмической информации относительно подземной зоны получают, используя данные волны сжатия, где волна сжатия образуется источником акустических волн, отражается от границ раздела между подземными слоями земли и затем принимается сейсмическими датчиками, расположенными на поверхности земли или около нее. Однако часть акустической энергии, образованной источником акустических волн, передается не вниз к подземным формациям, а вместо этого распространяется горизонтально вдоль поверхности земли. Эта часть сейсмического сигнала, называемая поверхностной волной,перемещается со скоростью распространения волны Рэлея, которая обычно значительно ниже,чем скорость волны сжатия, описанной выше. Хотя волна сжатия обычно распространяется намного быстрее, чем поверхностная волна,волна сжатия должна проходить значительно большее расстояние от источника акустических волн до отражающего слоя и к сейсмическому датчику, чем поверхностная волна, которая передается вдоль поверхности земли от источника до датчика, и волна сжатия и поверхностная волна нередко достигают сейсмического датчика одновременно. Поскольку поверхностная волна обычно не содержит никакой информации относительно подлежащей исследованию подземной геологической структуры, ее следует ослаблять (то есть исключать) до наибольшей возможной степени, прежде чем сейсмические данные будут использованы для образования карт подземной зоны. Поверхностная волна 2 обычно рассматривается как доминирующий источник шума, и эффективное удаление сигнала поверхностной волны часто значительно повышает качество подповерхностного изображения, получаемого во время сейсмических исследований. Поверхностная волна следует не с единственной скоростью распространения, а вместо этого демонстрирует широкий диапазон скоростей, который зависит от частоты сейсмического сигнала. Дисперсионный характер поверхностной волны является одной из причин относительно большой продолжительности сигнала поверхностной волны. Этот дисперсионный характер также делает более трудным разработку способов эффективного ослабления поверхностной волны в сигналах сейсмических данных. Обычный подход к проблеме подавления поверхностных волн при обработке сейсмических данных заключается в использовании группы приемных устройств во время сбора данных, а затем группировании сигналов сейсмических данных, полученных от каждого из приемных устройств. Однако использование групп приемных устройств имеет несколько резко выраженных недостатков, как с геофизической, так и с экономической точек зрения. В настоящее время в системах сбора сейсмических данных обычно используют группы приемных устройств, пространственное протяжение которых таково, что ослабляются шумовые колебания с длинами волн до 1,4 длины конфигурации датчиков. Это ведет к эффекту пространственного размытия: характеристика у конкретного пункта приемных устройств представляет собой сумму всех отдельных датчиков в группе приемных устройств. В промышленности имеется также тенденция, направленная на уменьшение размеров бункера. Стандартные размеры бункера 50x50 м могут быть, вероятно, уменьшены, например, до размера 40x40 м или 30x30 м, с целью преодоления проблем пространственного искажения и увеличения разрешения. Так например, для контролирования резервуара требуется высокое разрешение, с целью создания 3-мерной модели импеданса резервуара. Эта концепция меньших размеров бункера подвергается риску пространственным эффектом размытия, вводимым обычными группами приемных устройств. Помимо эффекта размытия, конфигурации датчиков также неэффективны, поскольку они слишком короткие. Способ суммирования группы (по эффективности аналогичный очень длинной группе приемных устройств), который является эффективным в ослаблении поверхностной волны, требует полной геометрии изгибов, слишком дорогостоящий и используется не часто. Совмещение конфигураций также препятствует высокому разрешению. Другой тенденцией в сейсмической разведке с высоким 3 разрешением является использование многокомпонентной регистрации, например, путем применения источника волн сжатия и регистрации всех преобразованных по моде волн, или путем использования источника волн сдвига и регистрации ответной реакции на волны сдвига. Однако для волн сдвига, конфигурации должны быть короткими (меньше, чем приблизительно 12 м), чтобы избежать затухания сигнала вследствие статики волн сдвига. Это дополнительно ставит под угрозу эффективность конфигураций в отношении затухания поверхностных волн и,таким образом, создает проблему сигнал/шум. Система сбора сейсмических данных с небольшими однодатчиковыми группами может избежать многих из этих трудностей. В этом типе системы, сейсмические отклики от каждого из отдельных датчиков могут обрабатываться по отдельности (то есть сигналы сейсмических данных от каждого из сейсмических датчиков в группе у конкретного пункта приемных устройств не суммируются немедленно для подавления поверхностной волны, присутствующей в сигналах сейсмических данных). С системами сбора с небольшой однодатчиковой группой связаны несколько преимуществ. Не требуются глубокие шпуры, чтобы снизить количество образующихся поверхностных волн: достаточны мелкие шпуры. Мелкие скважины менее дорогостоящие для бурения, и они обеспечивают выгоды в отношении окружающей среды, не требуя проникновения в более глубокие зоны коллекторов грунтовых вод. Не требуются системы взрывов (источник акустических волн), что снижает стоимость и сложность сейсмического процесса образования сигнала. Не требуются обширные конфигурации сейсмографов, вследствие чего снижаются вес оборудования и стоимость и уменьшается количество работников на местах, требуемых для проведения сейсмических исследований. Поскольку сигналы сейсмических данных поступают от отдельных датчиков (вместо немедленного суммирования ответов из всей группы датчиков), возможны оптимальные этапы обработки данных, типа анализа перемещения глубины,основанного на сейсмических трассах взрывов,или амплитуды в зависимости от смещения. Последующая обработка данных также по существу действует, как совершенный аттенюатор случайных шумов, то есть случайные шумы подавляются без каких-либо дополнительных расходов или требуемой обработки. Также можно снизить фактическую зону действия датчиков на конкретном пункте приемных устройств,например, с 24 до 16, благодаря улучшенному соотношению сигнал/шум данных отдельных датчиков. Однако, если система с небольшими однодатчиковыми группами считается эффективной,то должен использоваться новый способ ослаб 004486 4 ления поверхностной волны в принимаемых сигналах сейсмических данных. Следовательно, задачей настоящего изобретения является обеспечение улучшенного способа ослабления поверхностной волны в принимаемых сигналах сейсмических данных. В соответствии с настоящим изобретением обеспечен способ ослабления поверхностной волны в сигналах сейсмических данных, причем способ содержит этапы получения сигналов сейсмических данных от ближних сейсмических датчиков, создания разностного фильтра, который вводит оценку перепада поверхностной волны, проходящей между сейсмическими датчиками, и применения разностного фильтра к сигналам сейсмических данных, с целью образования сигнала сейсмических данных с ослабленной поверхностной волной. Заявляемый способ можно использовать с однопроходным и многопроходным режимами работы фильтра и можно использовать в связи с парами сигналов сейсмических данных или с группами сигналов сейсмических данных от региональной конфигурации ближних сейсмических датчиков. Альтернативные варианты осуществления способа включают, соответственно, предварительную обработку сигналов сейсмических данных, полученных от ближних сейсмических датчиков, или содержат получение дополнительных коэффициентов при создании соответствующего разностного фильтра. Заявляемый способ можно выполнять во временной области или в частотной области. Теперь настоящее изобретение будет описано с помощью примера со ссылкой на прилагаемые чертежи, на которых фиг. 1 изображает схематический вид процесса сбора сейсмических данных и фиг. 2 изображает набор сигналов сейсмических данных, иллюстрирующий заявляемый способ подавления поверхностной волны. На фиг. 1 изображен упрощенный схематический вид процесса сбора сейсмических данных. Источник 10 акустических волн типа заряда взрывчатого вещества помещен ниже поверхности 12 земли. Когда источник 10 акустических волн разряжается, он производит акустический импульс, который распространяется во всех направлениях от источника. Часть этого акустического импульса составляет волну 14 сжатия, которая распространяется от источника 10 акустических волн, отражается сейсмическим отражающим горизонтом 16 и принимается сейсмическим датчиком 18. На фиг.1 акустические волновые фронты типа волны 14 сжатия,для простоты иллюстрации показаны в виде траекторий лучей, а сейсмические отражающие горизонты типа сейсмического отражающего горизонта 16 содержат границу раздела между геологическими слоями, имеющими различные акустические импедансы. Другая часть акустического импульса составляет волну 20 сжатия, 5 которая распространяется от источника 10 акустических волн, проходит через сейсмический отражающий горизонт 16, отражается сейсмическим отражающим горизонтом 22, проходит через сейсмический отражающий горизонт 16 и принимается сейсмическим датчиком 18. Третья часть акустического импульса составляет поверхностную волну 24, которая распространяется близко к поверхности 12 земли от источника 10 акустических волн к сейсмическому датчику 18. Подобным образом, другая часть акустического импульса состоит из волны 26 сжатия,которая распространяется от источника 10 акустических волн, отражается сейсмическим отражающим горизонтом 16 и принимается сейсмическим датчиком 28. Следующая часть акустического импульса состоит из волны 30 сжатия, которая распространяется от источника 10 акустических волн, проходит через сейсмический отражающий горизонт 16, отражается сейсмическим отражающим горизонтом 22,проходит через сейсмический отражающий горизонт 16 и принимается сейсмическим датчиком 28. Дополнительная часть акустического импульса состоит из поверхностной волны 32,которая распространяется близко к поверхности 12 земли от источника 10 акустических волн к сейсмическому датчику 28. Сейсмические датчики 18 и 28 вместе с дополнительными сейсмическими датчиками 34 обычно формируют группу из сейсмических датчиков, которые разнесены в региональной конфигурации на конкретном пункте приемных устройств. Следует отметить, что с целью облегчения иллюстрации относительные положения источника 10 акустических волн, сейсмических датчиков 18, 28 и 34 и сейсмических отражающих горизонтов 16 и 22 искажены. Разнесение между сейсмическими датчиками 18, 28 и 34 в конкретной группе приемных устройств обычно составляет порядка нескольких метров, а расстояние между источником 10 акустических волн и самым дальним сейсмическим датчиком может составлять порядка одного-двух километров. Кроме того, глубина сейсмических отражающих горизонтов, представляющих интерес для углеводородной разведки, может быть порядка двух-восьми километров. Фиг. 2 изображает набор сигналов сейсмических данных, также называемых сейсмическими трассами, которые используются для описания заявляемого способа ослабления поверхностной волны. Заявляемый способ ослабления поверхностной волны основан на данных наблюдения,что, для сигналов сейсмических данных, принимаемых ближними сейсмическими датчиками, сейсмические данные отражения оказываются почти идентичными, в то время как составляющая поверхностной волны имеет некоторый дифференциальный уход. Это свойство 6 можно использовать для оценки содержания поверхностной волны, и впоследствии для ослабления поверхностной волны. На фиг. 2 первый сигнал 40 сейсмических данных представляет характерный сигнал сейсмических данных, полученный от сейсмического датчика 18 на фиг. 1, а второй сигнал 42 сейсмических данных представляет характерный сигнал сейсмических данных, полученный от сейсмического датчика 28 на фиг. 1. В изображениях сигналов сейсмических данных на фиг. 2, амплитуды волны сжатия представлены обычным способом в виде расстояний от главной оси, а интервал (время или расстояние) между выборками показан увеличивающимся по направлению к основанию каждого из сигналов сейсмических данных. Первый сигнал 40 сейсмических данных также будет обозначен позже символом R1, а второй сигнал 42 сейсмических данных будет обозначен позже символом R2. Можно заметить, что первый сигнал 40 сейсмических данных и второй сигнал 42 сейсмических данных являются фактически идентичными (поскольку датчики расположены чрезвычайно близко друг к другу по сравнению с расстоянием, которое должна преодолеть волна сжатия, чтобы достигнуть датчиков), за исключением находящейся под влиянием первой поверхностной волны области 44 в первом сигнале сейсмических данных и находящейся под влиянием второй поверхностной волны области 46 во втором сигнале сейсмических данных. Вследствие значительно более медленной скорости распространения поверхностной волны,поверхностная волна 32 достигает сейсмического датчика 28 значительно позже того, как поверхностная волна 24 достигает сейсмического датчика 18. Следовательно, находящаяся под влиянием второй поверхностной волны область 46 находится позже (то есть ниже) во втором сигнале 42 сейсмических данных, чем находящаяся под влиянием первой поверхностной волны область 44 в первом сигнале 40 сейсмических данных. Эта измеримая разность во времени прибытия поверхностной волны, называемая дифференциальным уходом поверхностной волны, обеспечивает возможность создания и применения дифференциального фильтра для образования сигнала сейсмических данных с ослабленной поверхностной волной. В терминах обработки сигнала, где символR1=S1+G1 R2=S2+G2 Однако в случае небольшого разнесения приемных устройств, сигналы отражения для всех ближних сейсмических датчиков будут(почти) идентичными, то есть S1=S2=S. Если не принять во внимание затухание поверхностной волны на дополнительном расстоянии между сейсмическим датчиком 18 и сейсмическим дат 7 чиком 28, то G2 будет представлять собой просто сигнал G1 с некоторой временной задержкой. В z-области временная задержка n выборок может быть представлена умножением на zn. Следовательно, в z-области G2=zn G1. Чтобы показать, как действует один вариант осуществления разностного фильтра из первого сигнала 40 сейсмических данных вычитают второй сигнал 42 сейсмических данных. Это вычитание создает промежуточный сигнал 48 данных, который показывает импульс поверхностной волны, принимаемый сейсмическим датчиком 18 из показанной на фиг.1 траектории луча 24, то есть первый импульс 50 поверхностной волны, и изображает инвертированный вариант импульса поверхностной волны, принимаемого сейсмическим датчиком 28 из траектории луча 32, то есть второй импульс 52 поверхностной волны (а также некоторую величину фонового шума с низкой амплитудой). В определенных выше терминах R1-R2=(S1+G1)-(S2+G2), но поскольку S1=S2 и G2=znG1,это выражение можно также записать какR1-R2=(l-zn)G1. После установления соответствующей оценки дифференциального ухода (zn) поверхностной волны, первый импульс 50 поверхностной волны и второй импульс 52 поверхностной волны можно объединить, чтобы образовать оценку 54 сигнала поверхностной волны,имеющего оцениваемый импульс 56 поверхностной волны. Член zn дифференциального ухода поверхностной волны представляет временную разницу между моментами появления поверхностной волны в первом сигнале 40 сейсмических данных и появления поверхностной волны во втором сигнале 42 сейсмических данных. В математическом представлении это выражается следующим образом: Оценку 54 сигнала поверхностной волны можно затем вычесть из первого сигнала 40 сейсмических данных, чтобы образовать сигнал 58 сейсмических данных с ослабленной поверхностной волной. Акустический сигнал, вызванный поверхностной волной 24 (по существу),удален из первого сигнала 40 сейсмических данных, и сигнал 58 сейсмических данных с ослабленной поверхностной волной более точно отражает срабатывание от волн 14 и 20 сжатия. Таким образом, сигнал сейсмических данных с ослабленной поверхностной волной обеспечивает лучший вид подстилающей геологической структуры между источником 10 акустических волн и сейсмическим датчиком 18. В математическом представлении имеем:S1=R1-G1 Следует отметить, что сигналы сейсмических данных, показанные на фиг.2, упрощены для более ясного демонстрирования заявляемо 004486 8 го способа ослабления поверхностной волны. В фактических сейсмических данных, импульс поверхностной волны редко имеет это отличие,как исходя из продолжительности импульса, так и его частотного спектра. Однако операция фильтрования, используемая для того, чтобы произвести оценку 54(G1) сигнала поверхностной волны, только условно является устойчивой, поскольку знаменатель (1-zn) может стать нулевым. Практически,оценка поверхностной волны обычно стабилизируется подстановкой коэффициента , который также частично подсчитывают для фактического затухания поверхностной волны, вызванного потерями при распространении, когда поверхностная волна распространяется на дополнительное расстояние между сейсмическими датчиками. Наиболее устойчивые результаты обычно обеспечивает постоянная стабилизации,равная порядка 0,95. Сигнал отражения и поверхностную волну можно одновременно рассчитать в одноходовой операции, путем решения следующего линейного уравнения: Чтобы выполнять способ ослабления поверхностной волны надлежащим образом, необходимо знать (доминирующую) скорость поверхностной волны, поскольку это определяет составляющую задержки zn, появляющуюся в фильтре. В одном способе определения (доминирующей) скорости поверхностной волны и соответствующей величины задержки zn используют сигналы сейсмических данных, принимаемые тремя равномерно разнесенными сейсмическими датчиками (ближним N, средним М,дальним F), расположенными на линии, коллинеарно с источником акустических волн. Если величины ТN, ТM и TF представляют сигналы сейсмических данных, принимаемые сейсмическими датчиками N, М и F, соответственно, аTFM(z)=TF(z)-TM(z) и TNM(z)=TN(z)-TM(z), составляющую задержки zn можно записать на основании функций корреляции следующим образом: Результаты представляют линейный фазовый сдвиг в функции частоты, из которого можно получить задержку. Для трехмерной (то есть нелинейной) конфигурации, задержку следует скорректировать, чтобы рассчитать фактическую разность в радиальном разделении между источником акустических волн и сейсмическими датчиками. Также можно использовать другие способы оценки величины задержки. Задержку можно 9 точками пересечения первого импульса 50 поверхностной волны и второго импульса 52 поверхностной волны в промежуточном сигнале 48 данных. Третий способ включает в себя выбор набора возможных временных задержек(основанный, например, на разности расстояний от приемных устройств до источника и ожидаемых скоростях поверхностной волны) и затем снижения до минимума энергии оценки сигнала по различным частотно-временным интервалам. Способ также можно улучшить, выполняя этапы, предназначенные для более точного выполнения допущений методики различия. Этапы предварительной обработки можно выполнять до создания разностного фильтра, чтобы обеспечить возможность более точного согласования сигналов сейсмических данных с допущениями методики. Эти этапы предварительной обработки могут включать в себя коррекцию сигналов сейсмических данных из-за нормального ухода (относительно незначительного сдвига во времени принятых сигналов отражения, вызванного разностями расстояний между сейсмическими датчиками и источником), коррекцию статики сигналов сейсмических данных,нормирование по амплитуде сигналов сейсмических данных, частотную фильтрацию сигналов сейсмических данных и выбор только таких частотных полос, где присутствует поверхностная волна и разностный фильтр оказывается устойчивым, выбор и фильтрацию только тех участков трасс сейсмических данных, где действительно присутствует поверхностная волна (то есть "конус поверхностной волны"), например,используя способ, раскрытый в нашей международной заявке на патент РСТWO 98/22825,включенной здесь путем ссылки, и корректирование оцениваемой временной задержки, если источник и датчики линейно не выровнены. Подобные улучшения способа можно производить путем включения коэффициентов в дополнение к дифференциальному уходу поверхностной волны при создании дифференциального фильтра. Например, можно выбрать набор масштабных коэффициентов амплитуды(с целью регулирования разностей между относительными амплитудами сигналов сейсмических данных) и набор весовых коэффициентов суммирования (чтобы обеспечить возможность влияния на заключительную отфильтрованную трассу каждой из входных трасс, подлежащих регулированию, просто от отношения 50/50), и затем можно рассчитать энергию оценки сигнала по различным частотно-временным интервалам для каждого из этих коэффициентов и можно пропустить на выход оценку сигнала с минимальной энергией. Другие усовершенствования способа включают осуществление оценки частотнозависимого дифференциального ухода поверхностной волны. Соответствующую дисперсионную скорость поверхностной волны можно по 004486 10 лучить путем выполнения анализа скорости,используя следующие этапы: определения соответствующего конуса поверхностной волны; выбора данных внутри конуса поверхностной волны; деления данных на временные интервалы и частотные полосы; для каждой частотной полосы, исследования диапазона скоростей,применения линейного ухода к данным, используя конкретную скорость, испытания всех скоростей в диапазоне, выбора конкретной скорости, которая обеспечивает самую высокую когерентность между трассами (то есть, которая дает фильтрованный сигнал с самой низкой энергией), и завершения испытания для каждой из частотных полос. Различные отфильтрованные частотные полосы можно соединить, преобразовать с помощью обратного преобразования Фурье и затем можно соединить все временные интервалы с целью создания выходной трассы. Множественные моды поверхностной волны могут быть ослаблены посредством создания разностных фильтров для различных доминирующих скоростей поверхностных волн (каждая из которых имеет отличающуюся составляющую zn дифференциального ухода/временной задержки различных поверхностных волн) и затем применения разностных фильтров к сигналам сейсмических данных каскадным многопроходным способом для оценки и ослабления поверхностной волны на каждой из различных доминирующих скоростей поверхностной волны. Можно также автоматически выбирать пары приемных устройств, используя форму расположения приемных устройств и выбирая для каждого приемного устройства группу других приемных устройств, расстояние которых от этого приемного устройства меньше, чем определенный порог. Из этой группы других приемных устройств можно отбирать конкретные приемные устройства, например, выбирая те приемные устройства, которые ближе всего подходят к оптимальному уходу, определяемому пользователем. Если количество доступных ближних сейсмических датчиков (K) больше, чем количество (N) подлежащих удалению доминирующих скоростей поверхностной волны, плюс один,можно использовать подбор методом наименьших квадратов с целью увеличения устойчивости способа. Один способ использования такого подбора методом наименьших квадратов состоит в решении следующего уравнения: В этом уравнении S снова обозначает оценку требуемого сигнала, вектор G содержитN оценок индивидуальных помех (поверхностной волны), вектор R содержит K входных сигналов сейсмических данных, а I обозначает еди 11 ничную матрицу [(N+l)x(N+l)]. А представляет собой матрицу [K x(N+l)], содержащую временные задержки в следующей форме: Чтобы избежать включения полюсов фильтра в диапазоне частот, для которого применяется разностный фильтр, сейсмические датчики имеют оптимальное разнесение, приблизительно равное более низкому значению из(0,051)/f0 и (0,950)/f1, где 1 является самой высокой скоростью поверхностной волны, подлежащей ослаблению, f0 - самая низкая частота поверхностной волны, подлежащей ослаблению,0 - самая низкая скорость поверхностной волны, подлежащей ослаблению, а f1 - самая высокая частота поверхностной волны, подлежащей ослаблению. В различные моменты последовательности обработки (например, для каждого временного интервала или частотной полосы), результаты разностного фильтра можно сравнивать с сопоставимыми частями альтернативных сейсмических трасс типа входных трасс и/или результатов обычного суммирования. Если выполнены некоторые критерии (типа любой из альтернатив, имеющих более низкую энергию, чем результаты разностного фильтра), результаты разностного фильтра можно отбросить и вместо этого при последующей обработке данных использовать лучшую альтернативу. Кроме того, можно выводить оценку поверхностной волны, используя этот способ, и использовать с целью управления качеством или в последующих процессах удаления поверхностной волны, в которых оценки поверхностной волны используют в качестве входных сигналов. Установлено, что с помощью заявляемого способа можно ослабить поверхностную волну на 10-13 дБ в диапазоне частот 10-50 Гц, в то же самое время ограничивая искажения сигнала в этом диапазоне частот до величины порядка 1-2 дБ. При использовании этого способа можно делать запись меньше, чем всех сигналов сейсмических данных от сейсмических датчиков в группе, и впоследствии восстанавливать незарегистрированные сигналы данных, используя один или более зарегистрированные сигналы сейсмических данных, и зарегистрированные сигналы сейсмических данных с ослабленной поверхностной волной. Настоящее изобретение включает в себя любые новые отличительные особенности или новую комбинацию раскрытых здесь отличительных особенностей, либо явно, либо косвенно. 12 ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ ослабления поверхностной волны в сигналах сейсмических данных, содержащий этапы получения сигналов сейсмических данных от ближних сейсмических датчиков,оценки дифференциального ухода поверхностной волны между сейсмическими датчиками,создания разностного фильтра, учитывающего дифференциальный уход поверхностной волны между сейсмическими датчиками, и применения этого разностного фильтра к сигналам сейсмических данных для образования сигнала сейсмических данных с ослабленной поверхностной волной. 2. Способ по п.1, в котором разностный фильтр имеет форму где S - сигнал сейсмических данных с ослабленной поверхностной волной, G - поверхностная волна, R1 и R2 - сигналы сейсмических данных от ближних сейсмических датчиков, zn - коэффициент временной задержки, связанный с дифференциальным уходом поверхностной волны, а- коэффициент стабилизации. 3. Способ по п.2, в котором коэффициент стабилизациисоставляет приблизительно 0,95. 4. Способ по п.1, в котором сигналы сейсмических данных принимают от K ближних сейсмических датчиков, где K является целым числом, большим или равным 3, и в котором дифференциальные уходы поверхностной волны оценивают для N доминирующих скоростей поверхностной волны, где N является целым числом, меньшим или равным K минус 1. 5. Способ по п.4, в котором поверхностную волну с N доминирующими скоростями поверхностной волны удаляют из сигналов сейсмических данных, полученных от K ближних сейсмических датчиков в операции одноходовой фильтрации, и эта операция одноходовой фильтрации производит сигнал сейсмических данных с ослабленной поверхностной волной в качестве выходного сигнала. 6. Способ по п.4, в котором K превышаетN плюс 1, и для образования упомянутого сигнала сейсмических данных с ослабленной поверхностной волной используют подбор методом наименьших квадратов. 7. Способ по п.1, в котором разностные фильтры создают для N доминирующих скоростей поверхностной волны, где N больше или равно 2, и каждый разностный фильтр применяют к сигналам сейсмических данных каскадным многопроходным способом для оценки и удаления поверхностной волны на каждой из N доминирующих скоростей поверхностной волны. 8. Способ по п.1, в котором сигналы сейсмических данных откорректированы для нормального ухода до создания разностного фильтра. 9. Способ по п.1, в котором сигналы сейсмических данных статически откорректированы до создания разностного фильтра. 10. Способ по п.1, в котором сигналы сейсмических данных нормализованы по амплитуде до создания разностного фильтра. 11. Способ по п.1, в котором сигналы сейсмических данных отфильтрованы по частоте до создания разностного фильтра. 12. Способ по п.1, в котором для создания разностного фильтра используют коэффициенты в дополнение к оценке дифференциального ухода поверхностной волны и коэффициент стабилизации. 13. Способ по п.1, в котором регистрируют меньше, чем все сигналы сейсмических данных от ближних сейсмических датчиков, и зарегистрированные сигналы сейсмических данных с ослабленной поверхностной волной обеспечивают возможность восстанавливать незарегистрированные сигналы сейсмических данных от ближних сейсмических датчиков. 14. Способ по п.1, в котором ближние сейсмические датчики имеют разнесение, приблизительно равное более низкому значению из(0,051)/f0 и (0,950) /f1, где 1 является самой высокой скоростью поверхностной волны, подлежащей ослаблению, f0 - самая низкая частота поверхностной волны, подлежащей ослаблению,0 -самая низкая скорость поверхностной волны,подлежащей ослаблению, а f1 - самая высокая частота поверхностной волны, подлежащей ослаблению. 15. Способ по п.1, в котором оценка дифференциального ухода поверхностной волны является частотно-зависимой и соответствующую дисперсионную скорость поверхностной волны получают путем выполнения анализа скорости, используя этапы определения соответствующего конуса поверхностной волны,выбора данных внутри конуса поверхностной волны, деления сигналов сейсмических данных на частотные полосы, для каждой частотной полосы исследования диапазона скоростей,применения линейного ухода к сигналам сейсмических данных, используя конкретную скорость, проверки всех скоростей в диапазоне,выбора конкретной скорости, которая обеспечивает самую высокую когерентность между сигналами сейсмических данных и завершения испытания для каждой из частотных полос. 16. Способ по п.1, в котором разностный фильтр является фильтром частотной области. 17. Способ по п.1, в котором оценку поверхностной волны выводят и используют для целей управления качеством или в последующих процессах удаления поверхностной волны. 18. Способ по п.1, в котором ближние сейсмические датчики автоматически выбирают на основании их расстояний разнесения. 19. Способ по п.1, в котором сигнал сейсмических данных с ослабленной поверхностной волной сравнивают с альтернативным сигналом сейсмических данных, и альтернативный сигнал сейсмических данных используют вместо сигнала сейсмических данных с ослабленной поверхностной волной при последующей обработке данных, если удовлетворяются определенные критерии выбора.
МПК / Метки
МПК: G01V 1/36
Метки: поверхностной, способ, ослабления, волны
Код ссылки
<a href="https://eas.patents.su/8-4486-sposob-oslableniya-poverhnostnojj-volny.html" rel="bookmark" title="База патентов Евразийского Союза">Способ ослабления поверхностной волны</a>
Способ поверхностной модификации резиновой крошки
Номер патента: 1545
Опубликовано: 23.04.2001
Автор: Гиззатуллина Яна Леонидовна
МПК: C08J 7/12
Метки: резиновой, модификации, поверхностной, способ, крошки
Формула / Реферат:
Способ поверхностной модификации резиновой крошки озонированием, отличающийся тем, что озонирование крошки размером 0,5-0,7 мм осуществляют озоно-кислородной смесью с объемной концентрацией в ней озона от 1 до 5% в течение 10-40 мин при постоянном перемешивании, при этом удаление озоносодержащей смеси осуществляют через слой резиновой крошки подлежащей озонированию.
Адаптивный способ ослабления сейсмического шума и помехи
Номер патента: 2508
Опубликовано: 27.06.2002
Автор: Озбек Али
МПК: G01V 1/36
Метки: адаптивный, шума, помехи, ослабления, способ, сейсмического
Формула / Реферат:
1. Способ для фильтрации шума из дискретных сейсмических сигналов с шумами, содержащий стадии, при осуществлении которых принимают сигналы, представляющие сейсмическую энергию, отраженную и/или преломленную от земной структуры, используя множество сейсмических приемников, и фильтруют принятые сигналы, используя, по меньшей мере частично, адаптивный фильтр, который ослабляет сигналы, в котором отсутствуют заранее заданные характеристики...
Материал покрытия для излучающих поверхностей, вырабатывающих электромагнитные волны, и способ его получения
Номер патента: 2928
Опубликовано: 31.10.2002
Автор: Райхельт Хельмут
Метки: покрытия, электромагнитные, вырабатывающих, волны, излучающих, способ, материал, поверхностей, получения
Формула / Реферат:
1. Материал покрытия для излучающих поверхностей, вырабатывающих электромагнитные волны, состоящий из связующего, изолирующего средства, диспергатора, воды и графита, отличающийся тем, что материал покрытия состоит из а) 55-65 маc.% основного вещества из 39-49 маc.% связующего, 18-23 мас.% изолирующего средства, 18-24 мас.% диспергатора, 12-16 маc.% дистиллированной воды и б) 35-45 мас.% графита, причем связующее состоит из 67,06-75,54 маc.%...
Способ ослабления теплового потока и устройство для защиты оператора пожарного ствола
Номер патента: 3013
Опубликовано: 26.12.2002
Авторы: Худоев Анвар Давлятович, Серебренников Евгений Александрович, Брушлинский Николай Николаевич, Аблязис Рустем Алиевич, Сабиров Матрасул, Лобанов Николай Борисович, Копылов Николай Петрович, Садыков Шамиль, Усманов Миржалил Хамитович, Касымов Юсуп Уктамович
МПК: A62C 2/08
Метки: устройство, теплового, ствола, защиты, потока, оператора, пожарного, ослабления, способ
Формула / Реферат:
1. Способ ослабления тепловых потоков, включающий создание завесы из охлаждающей жидкости путем подачи последней в пространство, образованное, по крайней мере, двумя поверхностями, по крайней мере, одна из которых выполнена в виде сетки, отличающийся тем, что подачу охлаждающей жидкости осуществляют путем регулируемого разбрызгивания или распыления в пространстве между поверхностями для создания парокапельно-воздушной среды и пленок из...
Синтетические пептиды, обладающие поверхностной активностью, и их применение для приготовления синтетического сурфактанта
Номер патента: 4058
Опубликовано: 25.12.2003
Авторы: Йёрнвалль Ханс, Робертсон Бенгт, Курстедт Торе, Вентура Паоло, Йоханссон Ян
МПК: C07K 14/785, A61P 11/00
Метки: сурфактанта, пептиды, поверхностной, синтетические, синтетического, приготовления, применение, активностью, обладающие
Формула / Реферат:
1. Аналоги белка C сурфактанта (SP-C), имеющие общую формулу (I), в соответствии с однобуквенным аминокислотным кодом FeGfIPZZPVHLKR(XaB)(XbB)n(XcB)mXdGALLMGL (I) где X представляет собой аминокислоту, выбранную из группы, состоящей из I, L, Nle (норлейцина); B представляет собой аминокислоту, выбранную из группы, состоящей из K, W, F, Y, орнитина; Z представляет собой S и, возможно, может быть связан через эфирную или тиоэфирную связи с...
Предыдущий патент: Способ и устройство для обработки оптических импульсных сигналов
Следующий патент: Способ и система защиты от коррозии проводящих конструкций
Случайный патент: Установка сжиженного природного газа низкого давления