Дозировочная система для статического смесителя и способ управления ею

Формула / Реферат
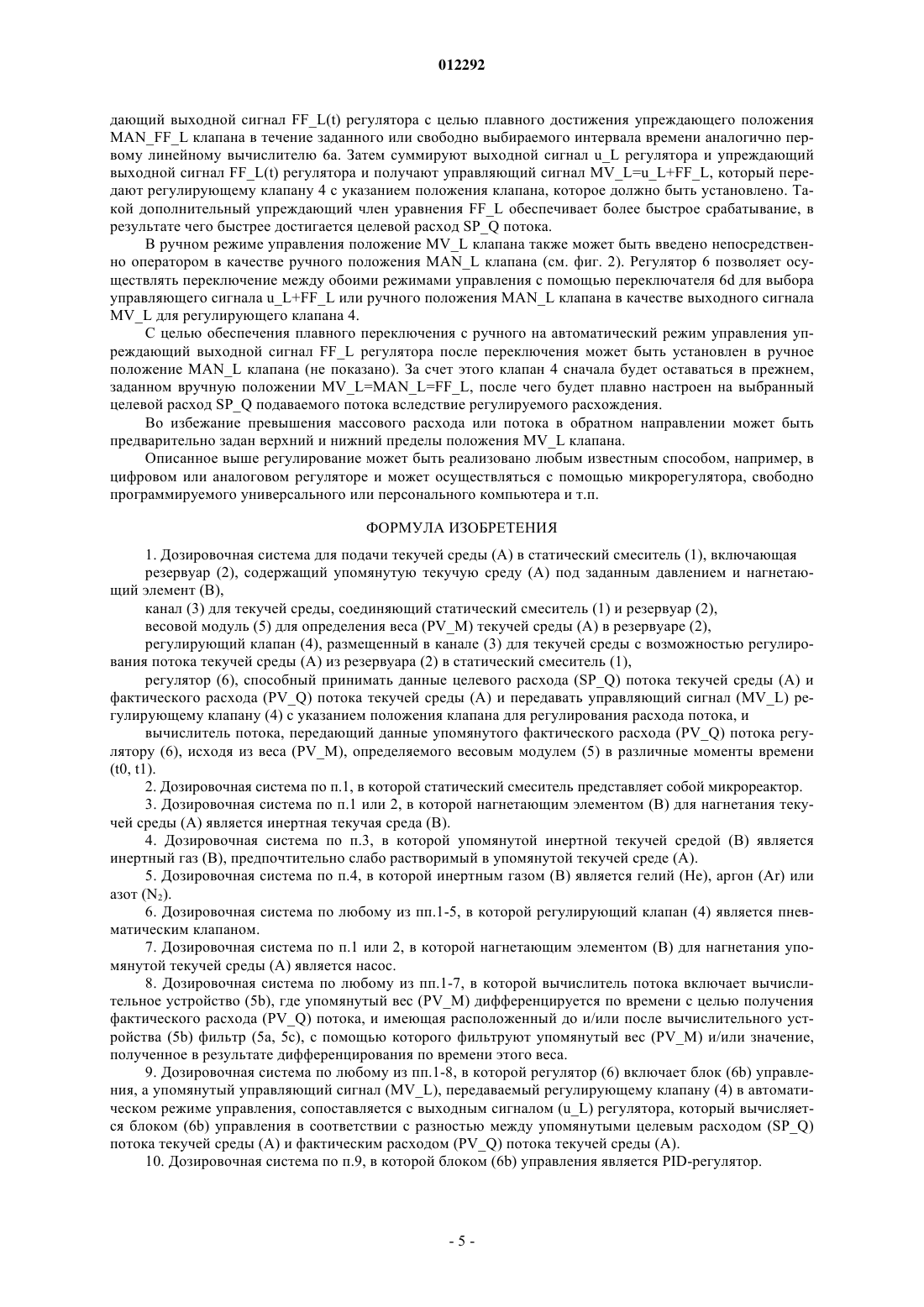
1. Дозировочная система для подачи текучей среды (А) в статический смеситель (1), включающая
резервуар (2), содержащий упомянутую текучую среду (А) под заданным давлением и нагнетающий элемент (В),
канал (3) для текучей среды, соединяющий статический смеситель (1) и резервуар (2),
весовой модуль (5) для определения веса (PV_M) текучей среды (А) в резервуаре (2),
регулирующий клапан (4), размещенный в канале (3) для текучей среды с возможностью регулирования потока текучей среды (А) из резервуара (2) в статический смеситель (1),
регулятор (6), способный принимать данные целевого расхода (SP_Q) потока текучей среды (А) и фактического расхода (PV_Q) потока текучей среды (A) и передавать управляющий сигнал (MV_L) регулирующему клапану (4) с указанием положения клапана для регулирования расхода потока, и
вычислитель потока, передающий данные упомянутого фактического расхода (PV_Q) потока регулятору (6), исходя из веса (PV_M), определяемого весовым модулем (5) в различные моменты времени (t0, t1).
2. Дозировочная система по п.1, в которой статический смеситель представляет собой микрореактор.
3. Дозировочная система по п.1 или 2, в которой нагнетающим элементом (B) для нагнетания текучей среды (А) является инертная текучая среда (В).
4. Дозировочная система по п.3, в которой упомянутой инертной текучей средой (В) является инертный газ (В), предпочтительно слабо растворимый в упомянутой текучей среде (А).
5. Дозировочная система по п.4, в которой инертным газом (В) является гелий (Не), аргон (Ar) или азот (N2).
6. Дозировочная система по любому из пп.1-5, в которой регулирующий клапан (4) является пневматическим клапаном.
7. Дозировочная система по п.1 или 2, в которой нагнетающим элементом (В) для нагнетания упомянутой текучей среды (А) является насос.
8. Дозировочная система по любому из пп.1-7, в которой вычислитель потока включает вычислительное устройство (5b), где упомянутый вес (PV_M) дифференцируется по времени с целью получения фактического расхода (PV_Q) потока, и имеющая расположенный до и/или после вычислительного устройства (5b) фильтр (5а, 5с), с помощью которого фильтруют упомянутый вес (PV_M) и/или значение, полученное в результате дифференцирования по времени этого веса.
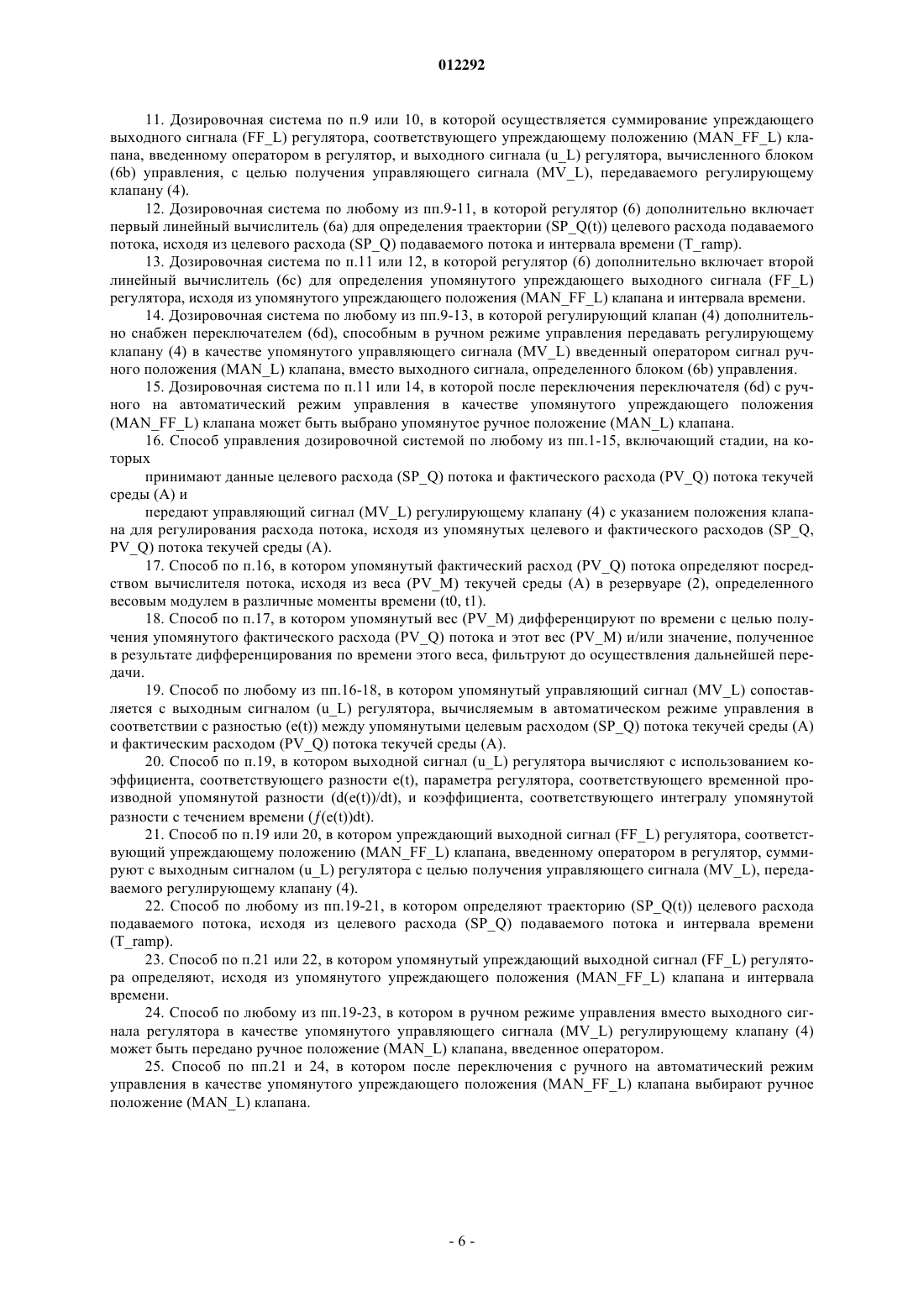
9. Дозировочная система по любому из пп.1-8, в которой регулятор (6) включает блок (6b) управления, а упомянутый управляющий сигнал (MV_L), передаваемый регулирующему клапану (4) в автоматическом режиме управления, сопоставляется с выходным сигналом (u_L) регулятора, который вычисляется блоком (6b) управления в соответствии с разностью между упомянутыми целевым расходом (SP_Q) потока текучей среды (А) и фактическим расходом (PV_Q) потока текучей среды (А).
10. Дозировочная система по п.9, в которой блоком (6b) управления является PID-регулятор.
11. Дозировочная система по п.9 или 10, в которой осуществляется суммирование упреждающего выходного сигнала (FF_L) регулятора, соответствующего упреждающему положению (MAN_FF_L) клапана, введенному оператором в регулятор, и выходного сигнала (u_L) регулятора, вычисленного блоком (6b) управления, с целью получения управляющего сигнала (MV_L), передаваемого регулирующему клапану (4).
12. Дозировочная система по любому из пп.9-11, в которой регулятор (6) дополнительно включает первый линейный вычислитель (6а) для определения траектории (SP_Q(t)) целевого расхода подаваемого потока, исходя из целевого расхода (SP_Q) подаваемого потока и интервала времени (T_ramp).
13. Дозировочная система по п.11 или 12, в которой регулятор (6) дополнительно включает второй линейный вычислитель (6с) для определения упомянутого упреждающего выходного сигнала (FF_L) регулятора, исходя из упомянутого упреждающего положения (MAN_FF_L) клапана и интервала времени.
14. Дозировочная система по любому из пп.9-13, в которой регулирующий клапан (4) дополнительно снабжен переключателем (6d), способным в ручном режиме управления передавать регулирующему клапану (4) в качестве упомянутого управляющего сигнала (MV_L) введенный оператором сигнал ручного положения (MAN_L) клапана, вместо выходного сигнала, определенного блоком (6b) управления.
15. Дозировочная система по п.11 или 14, в которой после переключения переключателя (6d) с ручного на автоматический режим управления в качестве упомянутого упреждающего положения (MAN_FF_L) клапана может быть выбрано упомянутое ручное положение (MAN_L) клапана.
16. Способ управления дозировочной системой по любому из пп.1-15, включающий стадии, на которых
принимают данные целевого расхода (SP_Q) потока и фактического расхода (PV_Q) потока текучей среды (А) и
передают управляющий сигнал (MV_L) регулирующему клапану (4) с указанием положения клапана для регулирования расхода потока, исходя из упомянутых целевого и фактического расходов (SP_Q, PV_Q) потока текучей среды (А).
17. Способ по п.16, в котором упомянутый фактический расход (PV_Q) потока определяют посредством вычислителя потока, исходя из веса (PV_M) текучей среды (А) в резервуаре (2), определенного весовым модулем в различные моменты времени (t0, t1).
18. Способ по п.17, в котором упомянутый вес (PV_M) дифференцируют по времени с целью получения упомянутого фактического расхода (PV_Q) потока и этот вес (PV_M) и/или значение, полученное в результате дифференцирования по времени этого веса, фильтруют до осуществления дальнейшей передачи.
19. Способ по любому из пп.16-18, в котором упомянутый управляющий сигнал (MV_L) сопоставляется с выходным сигналом (u_L) регулятора, вычисляемым в автоматическом режиме управления в соответствии с разностью (e(t)) между упомянутыми целевым расходом (SP_Q) потока текучей среды (А) и фактическим расходом (PV_Q) потока текучей среды (А).
20. Способ по п.19, в котором выходной сигнал (u_L) регулятора вычисляют с использованием коэффициента, соответствующего разности e(t), параметра регулятора, соответствующего временной производной упомянутой разности (d(e(t))/dt), и коэффициента, соответствующего интегралу упомянутой разности с течением времени (і(e(t))dt).
21. Способ по п.19 или 20, в котором упреждающий выходной сигнал (FF_L) регулятора, соответствующий упреждающему положению (MAN_FF_L) клапана, введенному оператором в регулятор, суммируют с выходным сигналом (u_L) регулятора с целью получения управляющего сигнала (MV_L), передаваемого регулирующему клапану (4).
22. Способ по любому из пп.19-21, в котором определяют траекторию (SP_Q(t)) целевого расхода подаваемого потока, исходя из целевого расхода (SP_Q) подаваемого потока и интервала времени (T_ramp).
23. Способ по п.21 или 22, в котором упомянутый упреждающий выходной сигнал (FF_L) регулятора определяют, исходя из упомянутого упреждающего положения (MAN_FF_L) клапана и интервала времени.
24. Способ по любому из пп.19-23, в котором в ручном режиме управления вместо выходного сигнала регулятора в качестве упомянутого управляющего сигнала (MV_L) регулирующему клапану (4) может быть передано ручное положение (MAN_L) клапана, введенное оператором.
25. Способ по пп.21 и 24, в котором после переключения с ручного на автоматический режим управления в качестве упомянутого упреждающего положения (MAN_FF_L) клапана выбирают ручное положение (MAN_L) клапана.

Текст
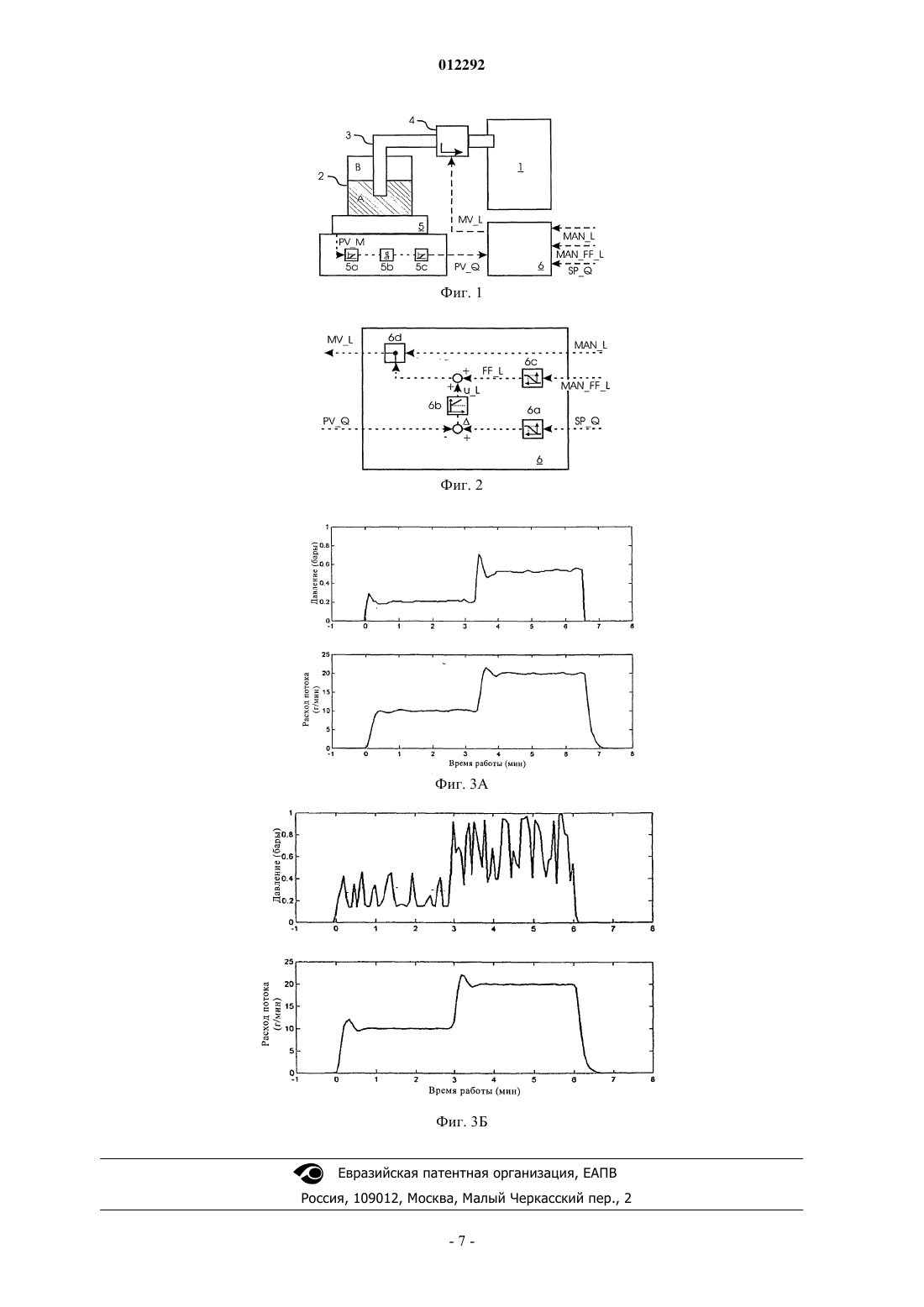
012292 Настоящее изобретение относится к дозировочной системе для статического смесителя, более точно микрореактора, и к способу управления ею. Статические смесители, такие как микрореакторы, служат для смешивания и/или введения в реакцию находящихся в них текучих сред или реагентов. Статические смесители имеют по меньшей мере одно, обычно два впускных отверстия, а текучие среды обычно подают в смеситель с помощью насоса, в частности поршневого насоса. Тем не менее, из-за циклически-периодических характеристик таких насосов в смесителе происходят колебания давления. Поскольку, в частности, в микрореакторах, которые представляют собой малогабаритные статические смесители, имеющие структурированные внутренние полости и поверхности с использованием или без использования температурного регулирования, необходимо высокое давление, в таких обычных системах происходят огромные пульсовые колебания давления. На фиг. 3 А показано давление подачи в микрореактор, обеспечиваемое обычным поршневым насосом. Такие колебания давления, в частности пульсовые колебания давления, происходящие в обычных системах, включая подающие насосы, способны отрицательно сказываться на химических реакциях, протекающих в реакторе (избирательности, механизме реакции, образовании побочных продуктов и т.д.), в особенности, если это реакция с регулируемым микросмешиванием или зависящая от давления реакция. Для подачи желаемого количества текучих сред необходимо измерять и точно регулировать удельный массовый расход каждой текучей среды. Известен способ измерения удельного массового расхода с помощью так называемого расходомера Кориолиса (РК или CMFC, от англ. coriolis mass flow controller). РК имеет длинную металлическую трубку, вибрирующую с определенной амплитудой. Однако эти вибрации способны ухудшить стабильность устройства и характеристики микрореактора. Кроме того, для точного измерения с помощью известных РК минимальный массовый расход должен составлять по меньшей мере 10 г/мин. Помимо этого, чтобы добиться высокой точности при малых расходах потока, необходима трубка очень малого диаметра (менее 1 мм), что может создать дополнительные сложности, связанные с засорением, закупоркой и т.д. К тому же, для РК требуется относительно длительное время пребывания в металлической конструкции, в результате чего могут возникать проблемы и нежелательные побочные эффекты, такие как химические реакции, коррозия, упреждающее усилие предварительного нагрева или предварительного охлаждения. Таким образом, задачей настоящего изобретения является создание дозировочной системы для статического смесителя с регулируемым массовым расходом с целью преодоления или, по меньшей мере,ослабления одного из упомянутых недостатков. Упомянутая задача решена с помощью дозировочной системы по п.1. Предложена дозировочная система для подачи текучей среды А в статический смеситель 1, включающая резервуар 2, в котором под заданным давлением находится упомянутая текучая среда А, и нагнетающий элемент В, обеспечивающий упомянутое заданное давление; канал 3 для текучей среды, соединяющий упомянутый статический смеситель 1 и резервуар 2; весовой модуль (дозатор) 5 для определения веса PVM текучей среды А, находящейся в резервуаре 2, регулирующий клапан 4, расположенный в канале 3 для текучей среды и регулирующий поток текучей среды А из резервуара 2 в статический смеситель 1; регулятор (блок управления) 6, который принимает данные целевого расхода SPQ потока текучей среды А и фактического расхода потока PVQ текучей среды А и передает регулирующему клапану 4 управляющий сигнал MVL с указанием положения клапана для регулирования расхода потока; и вычислитель потока, передающий данные фактического расхода потока PVQ регулятору 6, исходя из веса PVM, определенного весовым модулем 5 в различные моменты времени t0 и t1. Упомянутой текучей средой может являться жидкость или газ, например жидкий или газообразный реагент или растворитель, в котором необязательно растворен реагент. Для регулирования массового расхода упомянутой текучей среды, поступающей в смеситель, необходимо определять массовый или объемный расход. С этой целью в предложенной в настоящем изобретении дозировочной системе применяют весовой модуль и вычислитель потока. Поскольку вес текучей среды, находящейся в резервуаре, а также общий вес резервуара, текучей среды и нагнетающего элемента, меняется только в зависимости от потока текучей среды, выходящей из резервуара, расход потока текучей среды может быть определен на основании веса находящейся в резервуаре текучей среды, определенного весовым модулем в различные моменты времени t. Иными словами, если вес текучей среды в резервуаре или всей системы уменьшился на определенную величину за определенный период времени,расход потока текучей среды определяют путем деления упомянутой величины на упомянутый период времени. Упомянутые периоды времени, в течение которых весовой модуль определяет, а упомянутый вычислитель потока обрабатывает данные веса, предпочтительно выбирают достаточно короткими, чтобы обеспечить удовлетворительную точность расхода потока, но достаточно длинными во избежание искажений замеров. В отличие от известных РК при таком регулировании массового расхода сосуд для реакционных сред может быть изготовлен из любого применимого в реакции материала, например, стали, стекла, эмали, полимеров. Кроме того, весь регулятор может быть сконструирован из простых и дешевых элементов и не быть подверженным воздействию окружающей среды, как обычные РК или другие известные регуляторы массового расхода.-1 012292 В одном из вариантов осуществления нагнетающим элементом является насос, подающий текучую среду из резервуара в смеситель. Упомянутый насос может быть сконструирован любым известным способом, например, в виде поршневого насоса или шприцевого насоса. Регулирование насоса, а также резервуара должно осуществляться в зависимости от весового модуля, который в свою очередь определяет общий вес текучей среды, находящейся в резервуаре и нагнетающем элементе. Упомянутый весовой модуль может быть преимущественно переустановлен на исходную точку (нулевую точку) до начала подачи текучей среды, чтобы исключить постоянные величины веса оборудования, такого как резервуар, насос и т.д. Тем не менее, при использовании насоса в качестве нагнетающего элемента могут возникать вибрации и пульсовые колебания давления, описанные выше. В связи с этим в предпочтительном варианте осуществления в качестве нагнетающего элемента может использоваться инертная текучая среда под заданным давлением, достаточным для нагнетания текучей среды, подаваемой из резервуара в смеситель под заданным давлением. За счет этого в данном варианте осуществления можно, по существу, избежать вибраций пульсовых колебаний давления, создаваемых насосом. Такая виброустойчивая и неподвижная дозировочная система позволяет осуществлять дальнейшую обработку (предварительное охлаждение,предварительный нагрев, предварительное смешивание двух или более линий и т.д.) с помощью простых трубных соединений. Если инертная текучая среда поступает в резервуар, содержащий текучую среду для подачи в смеситель, то общий вес резервуара соответствующим образом меняется. Однако данное изменение не отражает массовый расход текучей среды, подаваемой в смеситель, и, тем самым, является причиной ошибок при определении массового расхода. В этой связи в качестве инертной текучей среды предпочтительно использовать инертный газ. За счет малой плотности такого инертного газа его приток не влияет существенно на определение массового расхода. Кроме того, такие ошибки могут быть исправлены в самом вычислителе потока. Предпочтительно упомянутый резервуар достаточно велик, чтобы поступление текучей среды в смеситель существенно не влияло на давление внутри резервуара. В предпочтительном варианте осуществления смеситель и резервуар соединены каналом для текучей среды, в котором находится регулирующий клапан для управления потоком текучей среды из резервуара в смеситель. Регулятор принимает данные целевого расхода потока текучей среды, выбранного оператором, и фактического расхода потока текучей среды. Затем регулятор передает регулирующему клапану управляющий сигнал с указанием положения клапана для соответствующего регулирования расхода потока. Так, в предпочтительном варианте осуществления текучая среда поступает в смеситель за счет избыточного давления внутри резервуара. Таким образом, не требуется насос, в частности поршневой насос, который в обычных дозировочных системах является причиной колебаний давления подаваемого потока. За счет этого дозировочная система согласно данному варианту осуществления настоящего изобретения способна уменьшать или исключать пульсацию давления подаваемого потока текучей среды. На фиг. 3 Б показано давление подачи в микрореактор, обеспечиваемое дозировочной системой согласно предпочтительному варианту осуществления настоящего изобретения. При сравнении с фиг. 3 А видно,что характеристики давления значительно сглажены. Путем управления регулирующим клапаном с использованием с обратной связи, исходя из разности между целевым расходом подаваемого потока и измеренным фактическим расходом подаваемого потока,можно с высокой точностью обеспечить упомянутый желаемый целевой расход подаваемого потока, не зная параметры насоса, такие как ход и т.д. Кроме того, отсутствие насоса выгодно, поскольку не только снижает затраты, но также исключает примеси, вносимые насосом, или утечки в таком насосе. Это наиболее предпочтительно в случае обращения с опасными текучими средами и может способствовать значительному улучшению герметизации системы. В предпочтительном варианте статический смеситель представляет собой микрореактор, т.е. малогабаритный статический смеситель с использованием или без использования температурного регулирования, имеющий структурированные полости и внутренние поверхности, необязательно покрытые катализаторами, рассчитанными на желаемую химическую реакцию. В упомянутом предпочтительном варианте осуществления избыточное давление текучей среды в резервуаре создают с помощью инертной текучей среды. Для этого в резервуаре дополнительно находится инертная текучая среда под заданным давлением для нагнетания упомянутой текучей среды. Это упрощает нагнетание текучей среды и восстановление заданного избыточного давления путем подачи дополнительной инертной текучей среды. Упомянутой инертной текучей средой предпочтительно является инертный газ, который предпочтительно нерастворим или слаборастворим в упомянутой текучей среде. Таким образом, с одной стороны, инертный газ не влияет на химические реакции, а с другой стороны - с таким инертным газом легче обращаться по сравнению с инертной жидкостью, и, в частности, он в большей степени поддается сжатию. Кроме того, за счет использования такого слаборастворимого или нерастворимого инертного газа можно преимущественно предотвратить образование пузырьков вследствие падения давления за регули-2 012292 рующим клапаном. Избыточное давление, создаваемое путем подачи газа, дополнительно увеличивает массу весового модуля, если резервуар с газом также не помещен на весовой модуль. Тем не менее, за счет значительно различия в удельной плотности нагнетающего газа и текучей среды, подаваемой в смеситель, упомянутый дополнительный вес можно легко компенсировать при вычислении. Дополнительный вес труб и соединительной системы не влияет на точность дозировочной системы. С целью дополнительного устранения или коррекции искажений вследствие частоты замеров, цифровых операций и т.д. осуществляют аналоговое или цифровое дифференцирование по времени упомянутого веса, чтобы получить фактический расход потока, при этом перед выводом фильтруют упомянутый вес и/или величину, полученную в результате дифференцирования по времени упомянутого веса. В принципе, определение и регулирования массового расхода может осуществляться с любой требуемой точностью. Эта точность ограничена лишь точностью и инерцией (т.е. замедленной реакцией) весового модуля. Это определение фактического расхода потока может осуществляться не только с низкими затратами, для чего необходим только весовой модуль и вычислительное устройство для обработки данных веса, но также исключает воздействие друг на друга средств измерения расхода потока, за счет чего преимущественно улучшаются уплотняющие характеристики дозировочной системы. Кроме того, в регуляторе дозировочной системы также может быть предусмотрен вычислитель потока. В дополнительном предпочтительном варианте осуществления при работе в режиме автоматического регулирования управляющим сигналом, передаваемым регулирующему клапану, является выходной сигнал регулятора, соответствующий разности между целевым расходом потока и фактическим расходом потока упомянутой текучей среды. Этот выходной сигнал регулятора может быть вычислен предпочтительно путем известного из уровня техники пропорционального, интегрального или дифференциального управления или путем любого их сочетания. Также могут применяться любые другие способы управления, такие как управление средствами размытой логики, с помощью нейронных сетей и т.п. Для усиления выходного сигнала регулятора его суммируют с упреждающим выходным сигналом регулятора, который соответствует упреждающему положению клапана, введенному в регулятор оператором, в результате чего получают выходной управляющий сигнал для упомянутого регулирующего клапана. Поскольку обычный пропорционально-интегрально-дифференциальный (PID) регулятор действует, исходя только из регулируемого расхождения между целевым и фактическим значениями, такие регуляторы имеют некоторую задержку, в течение которой должно накопиться достаточно большое упомянутое регулируемое расхождение для обеспечения достаточной степени регулирования. В отличие от этого при введении заданного упреждающего выходного сигнала регулятора преимущественно с самого начала получают значащий управляющий сигнал. Первый и/или второй линейный вычислитель может вычислять траекторию целевого расхода подаваемого потока и упреждающий выходной сигнал регулятора, соответственно, исходя из интервала времени и целевого расхода подаваемого потока/упреждающего положения клапана. Поскольку одномоментное введение постоянного целевого значения (соответствующего скачкообразной целевой траектории) привело бы к резкому изменению выходного сигнала регулятора и тем самым к пульсовому колебанию давления в дозировочной системе, полезно плавно увеличивать целевое значение до заданного уровня, предоставляя дозировочной системе время, чтобы следовать за таким плавным изменением. В качестве альтернативы предложенная в настоящем изобретении дозировочная система также может работать в режиме ручного управления. В таком режиме ручного управления регулирующему клапану в виде управляющего сигнала передают введенное оператором ручное положение клапана, а не выходной сигнал регулятора. Оператор может переключать режимы управления с автоматического на ручной и наоборот. В последнем случае в качестве ручного положения клапана преимущественно выбирают упреждающее положение клапана. За счет этого может быть обеспечен плавный переход с ручного на автоматический режим, поскольку сначала прежнее предварительно выбранное ручное положение клапана поддерживают посредством упреждающего выходного сигнала регулятора, а затем с помощью выходного сигнала регулятора сводят к минимуму различие между фактическим и целевым расходом подаваемого потока. Прочие задачи, особенности и преимущества настоящего изобретения будут понятны из зависимых пунктов формулы изобретения и описания его предпочтительных вариантов осуществления со ссылкой на чертежи, на которых: на фиг. 1 схематически показана дозировочная система согласно одному из вариантов осуществления настоящего изобретения; на фиг. 2 - конструкция показанного на фиг. 1 регулятора и на фиг. 3 А, 3 Б - давление подачи, обеспечиваемое дозировочной системой с использованием насоса и предложенной в настоящем изобретении дозировочной системой с использованием инертного газа соответственно. Дозировочная система согласно одному из вариантов осуществления настоящего изобретения способна подавать в смеситель 1 текучую среду А с желаемым расходом SPQ потока без значительных колебаний давления.-3 012292 С этой целью система имеет резервуар 2, в котором находится упомянутая текучая среда А и инертная текучая среда В под заданным давлением. Упомянутое давление достаточно для нагнетания текучей среды А, поступающей из резервуара 2 в смеситель 1. Упомянутой инертной текучей средой В предпочтительно является инертный газ В, который более предпочтительно слабо растворим в текучей среде. В качестве инертного газа может преимущественно использоваться, например, аргон (Ar), гелий (Не) или азот (N2). Смеситель 1 и резервуар 2 соединены друг с другом каналом 3 для текучей среды, в котором находится регулирующий клапан 4. Упомянутый регулирующий клапан 4 позволяет регулировать фактический расход подаваемого потока PVQ текучей среды А, поступающей в смеситель 1. Для этого регулирующий клапан 4 принимает управляющий сигнал регулятора 6 с целью регулирования расхода подаваемого потока. Упомянутый управляющий сигнал может, например, указывать положение MVL регулирующего клапана 4, при этом, чем более открытым является положение клапана, тем больше расход подаваемого потока. Предпочтительно в качестве упомянутого регулирующего клапана используют пневматический клапан. Упомянутый расход потока рассчитывает вычислитель потока. Для этого весовой модуль 5 определяет вес PVM текучей среды А в резервуаре 2. Весовой модуль 5 может, например, определять общий вес резервуара 2, текучей среды А и инертного газа В в нем или (необязательно) вес резервуара и инертного газа может быть вычтен. Путем дифференцирования упомянутого веса PVM получают изменение массы с течением времени, которое соответствует удельному массовому расходу текучей среды А, выходящей из резервуара 2. Иным словами, путем вычитания из фактического веса PVM(t1) предыдущего веса PVM(t0) и деления на истекший временной интервал (t1-t0) получают расход подаваемого потокаPVQ(t)=[(PVM(t1)-PVM(t0/(t1-t0)]. B альтернативном варианте осуществления упомянутый удельный массовый расход делят на плотность текучей среды А, чтобы определить объемный расход подаваемого потока. Для сглаживания искажений при замерах, а также искажений в результате цифровых операций может использоваться фильтр 5 а и/или фильтр 5 с для фильтрации сигнала, указывающего вес PVM, соответственно, до и после вычисления расхода подаваемого потока PVQ в вычислительном устройстве 5b. В качестве фильтра 5 а и/или 5 с может использоваться фильтр второго порядка, фильтр Баттеруорта или любой другой известный фильтр. Предпочтительно используют два независимых фильтра сигналов,а именно фильтр сигнала весового модуля и производных вычислений. Как показано на фиг. 2, в автоматическом режиме управления регулятор 6 осуществляет упреждающее регулирование расхода PVQ подаваемого потока. Для этого в упомянутый регулятор 6 вводят упомянутый измеренный фактический расход PVQ подаваемого потока, а также заданный или целевой расход SPQ подаваемого потока. В предпочтительном варианте осуществления регулятор 6 включает первый линейный вычислитель 6 а, который вычисляет траекторию целевого расхода SPQ подаваемого потока(t) с целью плавного достижения целевого расхода SPQ подаваемого потока в течение заданного или свободно выбираемого интервала времени Tramp. Такая траектория может, например, удовлетворять следующему уравнению: Измеренный фактический расход PVQ подаваемого потока вычитают из упомянутой траекторииSPQ(t) целевого расхода подаваемого потока или целевого расхода SPQ подаваемого потока, чтобы получить регулируемое расхождение e(t)=SPQ(t)-PVQ(t). Затем это регулируемое расхождение вводят в блок 6b управления, в котором получают соответствующий выходной сигнал uL регулятора. Упомянутый блок управления может использовать любой известный алгоритм управления, как, например, пропорциональное (P), интегральное (I) или дифференциальное (D) регулирование или любое их сочетание. В предпочтительном варианте осуществления блок 6b управления использует PID-регулятор для получения выходного сигнала регулятора согласно следующему уравнению: в котором P, D и I означают заданные или свободно выбираемые параметры регулятора соответственно. Затем упомянутый выходной сигнал uL регулятора передают регулирующему клапану 4 в качестве управляющего сигнала с указанием положения MVL клапана. В предпочтительном варианте осуществления суммируют выходной сигнал uL регулятора и дополнительный упреждающий выходной сигнал FFL регулятора. Для этого оператор вводит упреждающее положение MANFFL клапана. Для сглаживания полного цикла регулирования и ограничения резких изменений положения клапана, способных вызвать пульсовые колебания давления, регулятор 6 преимущественно может включать второй линейный вычислитель 6 с, вычисляющий упомянутый упреж-4 012292 дающий выходной сигнал FFL(t) регулятора с целью плавного достижения упреждающего положенияMANFFL клапана в течение заданного или свободно выбираемого интервала времени аналогично первому линейному вычислителю 6 а. Затем суммируют выходной сигнал uL регулятора и упреждающий выходной сигнал FFL(t) регулятора и получают управляющий сигнал MVL=uL+FFL, который передают регулирующему клапану 4 с указанием положения клапана, которое должно быть установлено. Такой дополнительный упреждающий член уравнения FFL обеспечивает более быстрое срабатывание, в результате чего быстрее достигается целевой расход SPQ потока. В ручном режиме управления положение MVL клапана также может быть введено непосредственно оператором в качестве ручного положения MANL клапана (см. фиг. 2). Регулятор 6 позволяет осуществлять переключение между обоими режимами управления с помощью переключателя 6d для выбора управляющего сигнала uL+FFL или ручного положения MANL клапана в качестве выходного сигналаMVL для регулирующего клапана 4. С целью обеспечения плавного переключения с ручного на автоматический режим управления упреждающий выходной сигнал FFL регулятора после переключения может быть установлен в ручное положение MANL клапана (не показано). За счет этого клапан 4 сначала будет оставаться в прежнем,заданном вручную положении MVL=MANL=FFL, после чего будет плавно настроен на выбранный целевой расход SPQ подаваемого потока вследствие регулируемого расхождения. Во избежание превышения массового расхода или потока в обратном направлении может быть предварительно задан верхний и нижний пределы положения MVL клапана. Описанное выше регулирование может быть реализовано любым известным способом, например, в цифровом или аналоговом регуляторе и может осуществляться с помощью микрорегулятора, свободно программируемого универсального или персонального компьютера и т.п. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Дозировочная система для подачи текучей среды (А) в статический смеситель (1), включающая резервуар (2), содержащий упомянутую текучую среду (А) под заданным давлением и нагнетающий элемент (В),канал (3) для текучей среды, соединяющий статический смеситель (1) и резервуар (2),весовой модуль (5) для определения веса (PVM) текучей среды (А) в резервуаре (2),регулирующий клапан (4), размещенный в канале (3) для текучей среды с возможностью регулирования потока текучей среды (А) из резервуара (2) в статический смеситель (1),регулятор (6), способный принимать данные целевого расхода (SPQ) потока текучей среды (А) и фактического расхода (PVQ) потока текучей среды (A) и передавать управляющий сигнал (MVL) регулирующему клапану (4) с указанием положения клапана для регулирования расхода потока, и вычислитель потока, передающий данные упомянутого фактического расхода (PVQ) потока регулятору (6), исходя из веса (PVM), определяемого весовым модулем (5) в различные моменты времени(t0, t1). 2. Дозировочная система по п.1, в которой статический смеситель представляет собой микрореактор. 3. Дозировочная система по п.1 или 2, в которой нагнетающим элементом (B) для нагнетания текучей среды (А) является инертная текучая среда (В). 4. Дозировочная система по п.3, в которой упомянутой инертной текучей средой (В) является инертный газ (В), предпочтительно слабо растворимый в упомянутой текучей среде (А). 5. Дозировочная система по п.4, в которой инертным газом (В) является гелий (Не), аргон (Ar) или азот (N2). 6. Дозировочная система по любому из пп.1-5, в которой регулирующий клапан (4) является пневматическим клапаном. 7. Дозировочная система по п.1 или 2, в которой нагнетающим элементом (В) для нагнетания упомянутой текучей среды (А) является насос. 8. Дозировочная система по любому из пп.1-7, в которой вычислитель потока включает вычислительное устройство (5b), где упомянутый вес (PVM) дифференцируется по времени с целью получения фактического расхода (PVQ) потока, и имеющая расположенный до и/или после вычислительного устройства (5b) фильтр (5 а, 5 с), с помощью которого фильтруют упомянутый вес (PVM) и/или значение,полученное в результате дифференцирования по времени этого веса. 9. Дозировочная система по любому из пп.1-8, в которой регулятор (6) включает блок (6b) управления, а упомянутый управляющий сигнал (MVL), передаваемый регулирующему клапану (4) в автоматическом режиме управления, сопоставляется с выходным сигналом (uL) регулятора, который вычисляется блоком (6b) управления в соответствии с разностью между упомянутыми целевым расходом (SPQ) потока текучей среды (А) и фактическим расходом (PVQ) потока текучей среды (А). 10. Дозировочная система по п.9, в которой блоком (6b) управления является PID-регулятор.-5 012292 11. Дозировочная система по п.9 или 10, в которой осуществляется суммирование упреждающего выходного сигнала (FFL) регулятора, соответствующего упреждающему положению (MANFFL) клапана, введенному оператором в регулятор, и выходного сигнала (uL) регулятора, вычисленного блоком(6b) управления, с целью получения управляющего сигнала (MVL), передаваемого регулирующему клапану (4). 12. Дозировочная система по любому из пп.9-11, в которой регулятор (6) дополнительно включает первый линейный вычислитель (6 а) для определения траектории (SPQ(t целевого расхода подаваемого потока, исходя из целевого расхода (SPQ) подаваемого потока и интервала времени (Tramp). 13. Дозировочная система по п.11 или 12, в которой регулятор (6) дополнительно включает второй линейный вычислитель (6 с) для определения упомянутого упреждающего выходного сигнала (FFL) регулятора, исходя из упомянутого упреждающего положения (MANFFL) клапана и интервала времени. 14. Дозировочная система по любому из пп.9-13, в которой регулирующий клапан (4) дополнительно снабжен переключателем (6d), способным в ручном режиме управления передавать регулирующему клапану (4) в качестве упомянутого управляющего сигнала (MVL) введенный оператором сигнал ручного положения (MANL) клапана, вместо выходного сигнала, определенного блоком (6b) управления. 15. Дозировочная система по п.11 или 14, в которой после переключения переключателя (6d) с ручного на автоматический режим управления в качестве упомянутого упреждающего положения(MANFFL) клапана может быть выбрано упомянутое ручное положение (MANL) клапана. 16. Способ управления дозировочной системой по любому из пп.1-15, включающий стадии, на которых принимают данные целевого расхода (SPQ) потока и фактического расхода (PVQ) потока текучей среды (А) и передают управляющий сигнал (MVL) регулирующему клапану (4) с указанием положения клапана для регулирования расхода потока, исходя из упомянутых целевого и фактического расходов (SPQ,PVQ) потока текучей среды (А). 17. Способ по п.16, в котором упомянутый фактический расход (PVQ) потока определяют посредством вычислителя потока, исходя из веса (PVM) текучей среды (А) в резервуаре (2), определенного весовым модулем в различные моменты времени (t0, t1). 18. Способ по п.17, в котором упомянутый вес (PVM) дифференцируют по времени с целью получения упомянутого фактического расхода (PVQ) потока и этот вес (PVM) и/или значение, полученное в результате дифференцирования по времени этого веса, фильтруют до осуществления дальнейшей передачи. 19. Способ по любому из пп.16-18, в котором упомянутый управляющий сигнал (MVL) сопоставляется с выходным сигналом (uL) регулятора, вычисляемым в автоматическом режиме управления в соответствии с разностью (e(t между упомянутыми целевым расходом (SPQ) потока текучей среды (А) и фактическим расходом (PVQ) потока текучей среды (А). 20. Способ по п.19, в котором выходной сигнал (uL) регулятора вычисляют с использованием коэффициента, соответствующего разности e(t), параметра регулятора, соответствующего временной производной упомянутой разности (d(e(t/dt), и коэффициента, соответствующего интегралу упомянутой разности с течением времени e(tdt). 21. Способ по п.19 или 20, в котором упреждающий выходной сигнал (FFL) регулятора, соответствующий упреждающему положению (MANFFL) клапана, введенному оператором в регулятор, суммируют с выходным сигналом (uL) регулятора с целью получения управляющего сигнала (MVL), передаваемого регулирующему клапану (4). 22. Способ по любому из пп.19-21, в котором определяют траекторию (SPQ(t целевого расхода подаваемого потока, исходя из целевого расхода (SPQ) подаваемого потока и интервала времени(Tramp). 23. Способ по п.21 или 22, в котором упомянутый упреждающий выходной сигнал (FFL) регулятора определяют, исходя из упомянутого упреждающего положения (MANFFL) клапана и интервала времени. 24. Способ по любому из пп.19-23, в котором в ручном режиме управления вместо выходного сигнала регулятора в качестве упомянутого управляющего сигнала (MVL) регулирующему клапану (4) может быть передано ручное положение (MANL) клапана, введенное оператором. 25. Способ по пп.21 и 24, в котором после переключения с ручного на автоматический режим управления в качестве упомянутого упреждающего положения (MANFFL) клапана выбирают ручное положение (MANL) клапана.
МПК / Метки
МПК: G01F 23/20, G01F 1/00, G05D 7/06, G01F 1/86
Метки: дозировочная, смесителя, система, способ, статического, управления
Код ссылки
<a href="https://eas.patents.su/8-12292-dozirovochnaya-sistema-dlya-staticheskogo-smesitelya-i-sposob-upravleniya-eyu.html" rel="bookmark" title="База патентов Евразийского Союза">Дозировочная система для статического смесителя и способ управления ею</a>
Способ и система управления скоростью двигателя для улучшения переключения передач
Номер патента: 3849
Опубликовано: 30.10.2003
Автор: Мейер Дуэйн Фредерик
МПК: B60K 41/10
Метки: переключения, система, управления, способ, передач, улучшения, скоростью, двигателя
Формула / Реферат:
1. Способ улучшения качества переключения передач в транспортном средстве, имеющем оснащенный регулятором двигатель (10), приводящий в действие силовую трансмиссию (12) с переключением скоростей под нагрузкой, содержащую коробку (18) передач, которая работает с помощью набора управляемых давлением муфт (20) сцепления, управление которыми осуществляется с помощью соответствующего набора клапанов (22) управления переключением передач с приводом от...
Оптоэлектронная система управления и способ управления
Номер патента: 3571
Опубликовано: 26.06.2003
Авторы: Леггет Найджел Дерек, Макиннес Джеймс
МПК: H03K 17/78, G08C 23/06
Метки: управления, способ, система, оптоэлектронная
Формула / Реферат:
1. Система управления, предназначенная для приведения в действие множества электротехнических устройств и имеющая импульсный источник света, выдающий световые импульсы с варьируемой частотой, которые поступают во множество управляющих шлюзов, каждый из которых при его освещении световыми импульсами с запускающей частотой, при которой происходит срабатывание соответствующего устройства, обеспечивает подачу на такое устройство рабочего напряжения,...
Система управления сельскохозяйственного или промышленного транспортного средства и способ эксплуатации системы управления
Номер патента: 7823
Опубликовано: 27.02.2007
Авторы: Тарасинский Николай, Кнеер Бернд, Райнардс Марко, Зоботцик Йоахим
МПК: B60K 6/04, B60K 31/00, B60K 17/356...
Метки: система, эксплуатации, системы, управления, сельскохозяйственного, транспортного, способ, средства, промышленного
Формула / Реферат:
1. Система управления для сельскохозяйственного или промышленного транспортного средства, в частности трактора, причем для каждой полуоси моста, предпочтительно переднего моста (20), транспортного средства (10) предусмотрен электрический привод (22, 24), при помощи которого приводится по меньшей мере одно соединенное с соответствующей полуосью колесо (26), причем электропривод (22, 24) управляется таким образом, что от электропривода (22, 24)...
Система и способ для управления множеством инструментов посредством одной управляющей линии
Номер патента: 6472
Опубликовано: 29.12.2005
Авторы: Йокела Тимо, Джоунас Джейсон К., Триттскух Дженнифер Э., Туэхе Йарле, Ро Ян, Росс Дональд В.
МПК: E21B 44/00, E21B 34/16
Метки: линии, управляющей, управления, одной, способ, посредством, инструментов, система, множеством
Формула / Реферат:
1. Система для управления множеством клапанных систем, развернутых в скважине, содержащая множество устройств для регулирования расхода, индексирующее устройство, функционально соединенное с каждым устройством для регулирования расхода, гидравлическую управляющую линию в сообщении по текучей среде с каждым индексирующим устройством, при этом индексирующие устройства устройств для регулирования расхода выполнены с возможностью согласованного...
Система и способ управления по меньшей мере одним устройством
Номер патента: 11398
Опубликовано: 27.02.2009
Авторы: Нильсен Мартин Сандал, Андреасен Бьярне Равнал
МПК: G05B 19/042, E06B 9/68
Метки: одним, управления, устройством, мере, способ, меньшей, система
Формула / Реферат:
1. Система управления по меньшей мере одним устройством (2, 3), таким как, например, механизм управления для двери, ворот, окна, штор, жалюзи, занавеса, навеса или источника света, причем упомянутая система содержит, по меньшей мере, управляемый модуль (10, 14), связанный с упомянутым по меньшей мере одним устройством и множеством узлов (12, 16, 19, 20, 22) для передачи сигналов управления к упомянутому по меньшей мере одному управляемому модулю...
Предыдущий патент: Способ получения пищевого продукта или пищевого полуфабриката и устройство для его осуществления
Следующий патент: Каталитическая структура
Случайный патент: Опорное средство для защитного устройства