Объемное устройство “машина голубева”
Формула / Реферат
1. Объемное устройство, содержащее корпус с опорными элементами, рабочий орган, снабженный меридиональными полостями и установленный с возможностью сферического движения, замыкатели, размещенные в меридиональных полостях с образованием рабочих камер и установленные на опорных элементах с возможностью азимутального перемещения, элементы привода рабочего органа и элементы подвода и отвода рабочего тела, отличающееся тем, что установка замыкателей на опорных элементах выполнена, с обеспечением непрерывного взаимодействия замыкателей с опорными элементами в процессе азимутального перемещения замыкателей.
2. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи размещенной в замыкателе азимутальной направляющей, взаимодействующей с ползуном, установленным с возможностью поворота на опорном элементе.
3. Объемное устройство по п.2, отличающееся тем, что каждый ползун выполнен в виде призматического тела, цилиндрическая и плоские поверхности которого покрыты антифрикционным материалом.
4. Объемное устройство по п.2, отличающееся тем, что каждый ползун выполнен в виде ролика.
5. Объемное устройство по п.4, отличающееся тем, что ролик выполнен бочкообразным.
6. Объемное устройство по п.4, отличающееся тем, что ролик состоит из средней и двух боковых частей, направляющая выполнена с возможностью контакта одной стороной со средней частью ролика, а другой стороной - с его боковыми частями, при этом все части ролика, установлены с возможностью независимого вращения.
7. Объемное устройство по п.2, отличающееся тем, что ползун образован плоскими участками опорного элемента, а замыкатель снабжен участками поверхности вращения, диаметр которой соответствует ширине меридиональной полости.
8. Объемное устройство по п.2, отличающееся тем, что направляющая выполнена в виде пластины, установленной концами в замыкателе, а каждый ползун - в виде двух вкладышей, размещенных в расточке опорного элемента, при этом средняя часть пластины размещена между вкладышами, а расточка снабжена окнами для прохода концов пластины.
9. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи непосредственного размещения замыкателя с возможностью поворота на опорном элементе, при этом замыкатель выполнен в виде эксцентрика, центральная ось которого смещена в меридиональном направлении и проведена через центр сферического движения рабочего органа, а диаметр эксцентрика соответствует ширине меридиональной полости.
10. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи непосредственного размещения замыкателя с возможностью поворота на опорном элементе, при этом замыкатель выполнен в виде пары соосных эксцентриков, центральные оси которых симметрично разнесены в меридиональном направлении и проведены через центр сферического движения рабочего органа, а диаметр каждого эксцентрика соответствует ширине меридиональной полости.
11. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи серьги, шарнирно соединенной одним концом с опорным элементом, а вторым концом - с пальцем, закрепленным на замыкателе, при этом ось пальца смещена в меридиональном направлении и проведена через центр сферического движения рабочего органа.
12. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи размещенного на опорном элементе с возможностью поворота двуплечего рычага, на каждом конце которого размещен упор, а замыкатель состоит из двух одинаковых, соединенных между собой упругой связью частей, каждая часть которого снабжена кронштейном с пяткой, взаимодействующей с упором по сферической поверхности, при этом центр сферической поверхности, размещен на геометрической оси, проходящей через центр сферического движения рабочего органа и середину меридиональной полости при ее крайнем положении.
13. Объемное устройство по п.12, отличающееся тем, что упоры выполнены в виде плосковыпуклых линз, установленных плоской поверхностью на концах рычага с возможностью перемещения.
Текст
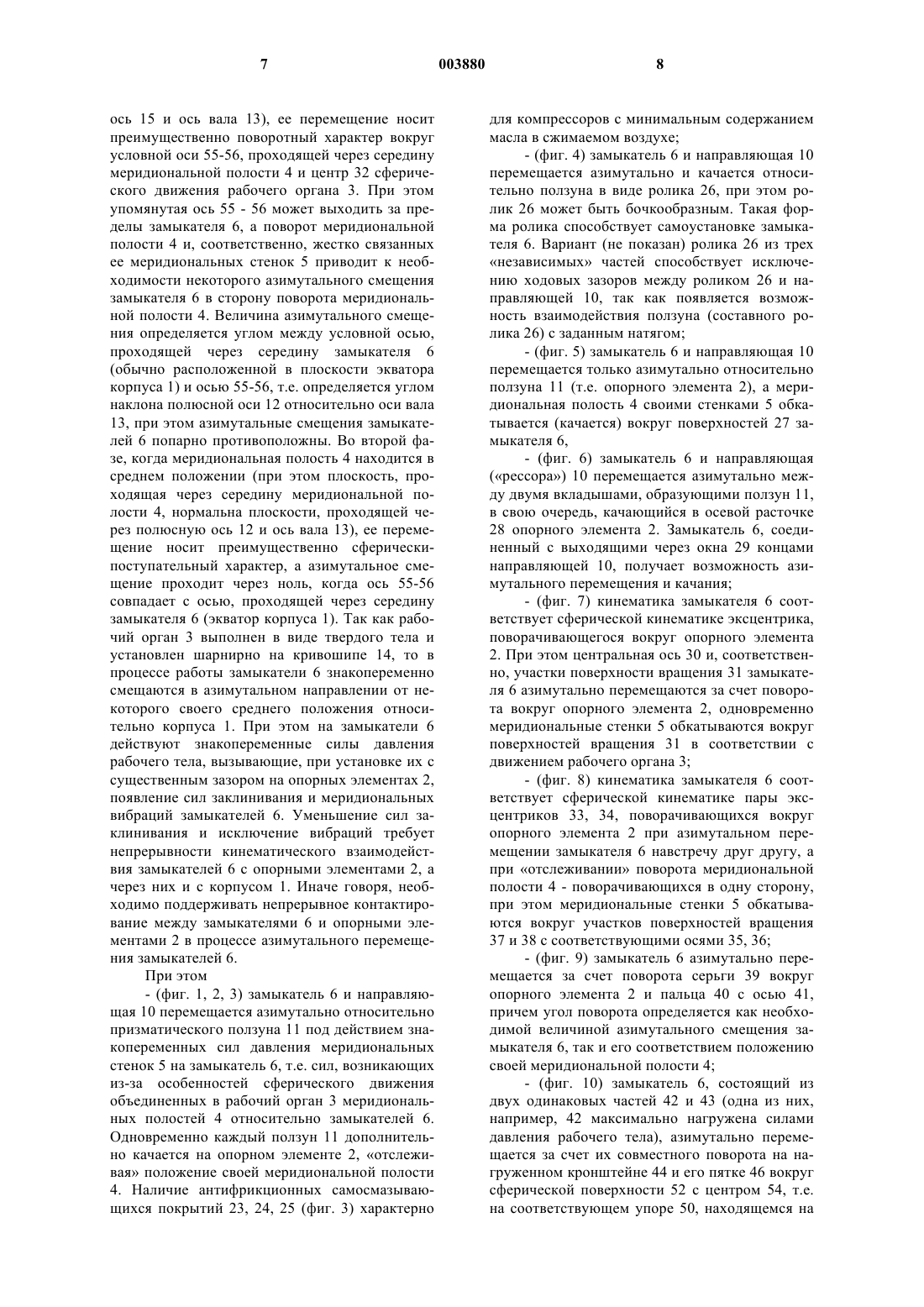
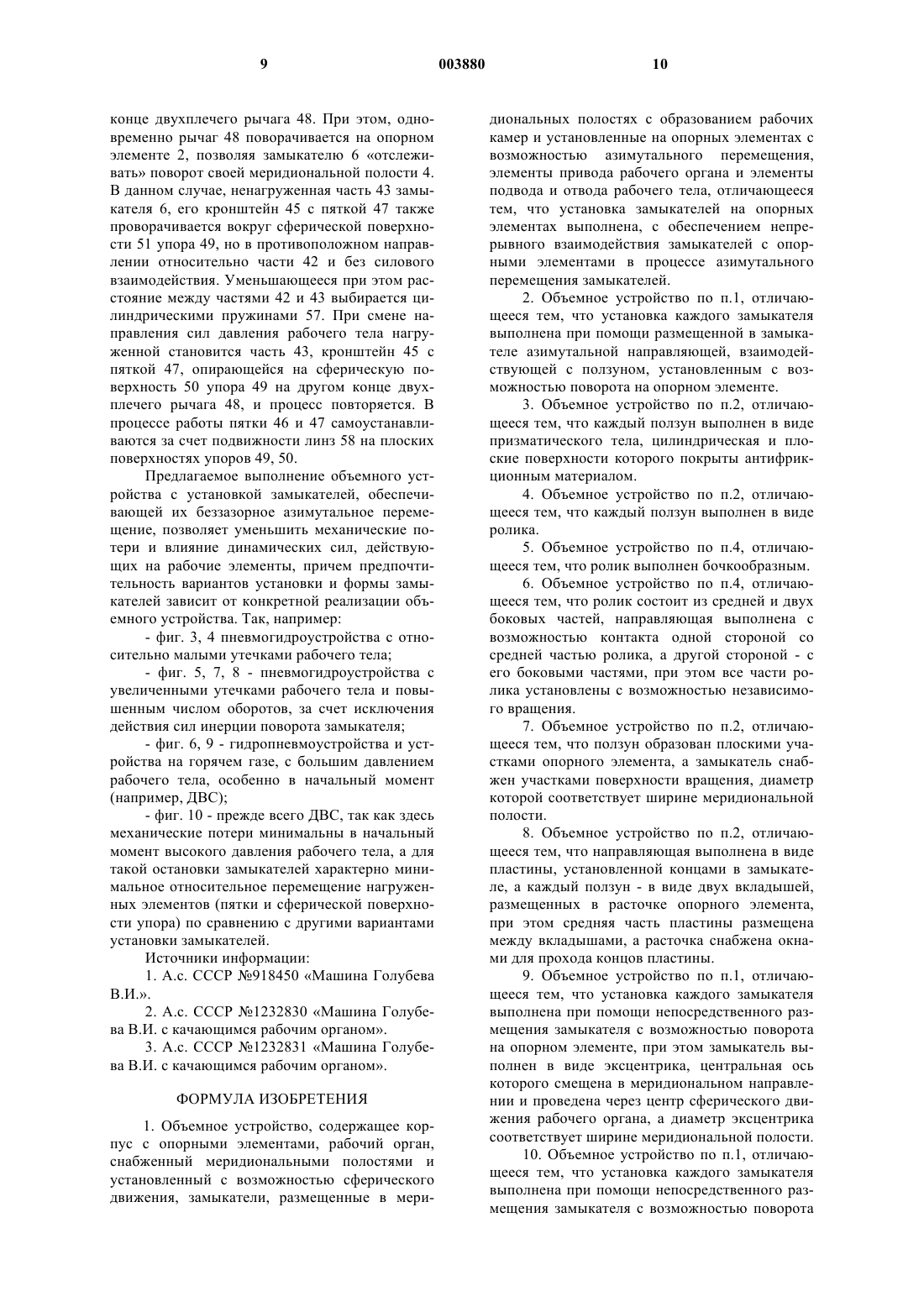
1 Изобретение относится к области машиностроения и может быть использовано в качестве элементной базы для создания различных объемных (поршневых) устройств роторного типа,характеризующихся сферическим вращательнопоступательным движением рабочего органа и относительно большим числом (8-20) рабочих камер, а также полной уравновешенностью. Известно объемное устройство [1], содержащее корпус с опорными элементами и рабочий орган, установленный в корпусе с возможностью сферического движения. При этом рабочий орган снабжен меридиональными полостями, в которых размещены с образованием рабочих камер замыкатели (поршни, или перемычки в [1]), установленные с помощью опорных элементов. Устройство содержит элементы подвода и отвода рабочего тела, а также элементы привода рабочего органа, обеспечивающие движение конца условной полюсной оси рабочего органа по замкнутой траектории, например, окружности. Таким элементом может быть шарнир на рабочем органе, установленный на косом кривошипе. Кинематический анализ устройства показывает, что для движения рабочего органа необходима определенная азимутальная подвижность замыкателей, зависящая от угла качания рабочего органа и азимутального угла между меридиональными полостями, примерно (1,52,5)% от радиуса рабочего органа. Недостатком известного устройства является выполнение упомянутой азимутальной подвижности замыкателей за счет увеличения зазоров как между замыкателями и стенками меридиональных полостей, так и между замыкателями и опорными элементами (осями). При этом приходится ограничиваться относительно малым углом качания рабочего органа (до 10),что уменьшает удельные габаритные характеристики устройства при одновременном ухудшении рабочих характеристик за счет увеличения утечек рабочего тела и действия динамических сил, вызываемых перекладкой замыкателей в процессе работы. Эти же недостатки (кроме малого угла качания рабочего органа) присущи и вариантам выполнения известного устройства [2], [3]. В варианте [2] замыкатели азимутально не перемещаются (перемещаются только элементы уплотнения) и поэтому замыкатели установлены в меридиональных полостях с заведомо большим зазором, что приводит к увеличению утечек и увеличению потерь на трение из-за перекоса замыкателей при их повороте. В варианте [3](прототипе) замыкатели установлены на опорных элементах (осях) с заведомо большим кольцевым зазором. При азимутальном перемещении замыкателей наличие кольцевого зазора приводит к увеличению потерь на трение за счет некоторого заклинивания замыкателей между стенками меридиональной полости и опорным 2 элементом, а также (особенно при работе с газообразным рабочим телом) к резкому изменению положения замыкателей при изменении направления перепада давления в рабочих камерах, т.е. к возникновению вредных динамических сил. Техническим результатом предлагаемого решения является минимизация потерь на трение и минимизация вредных динамических сил,что приводит к уменьшению вибраций, увеличению надежности и долговечности устройства. Для этого в устройстве, содержащем корпус с опорными элементами, рабочий орган,снабженный меридиональными полостями и установленный с возможностью сферического движения, а также замыкатели, размещенные в меридиональных полостях с образованием рабочих камер и установленные на опорных элементах с возможностью азимутального перемещения (отметим, что рабочий орган может быть помещен или между стенками корпуса, или охватывать только внутреннюю стенку корпуса,или охватываться только внешней стенкой корпуса, а опорный элемент может быть выполнен в виде оси, проходящей через замыкатель, или замыкатель может быть снабжен одной или двумя цапфами, опирающимися на расточки в корпусе). Имеются также элементы привода рабочего органа и элементы подвода и отвода рабочего тела. Технический результат достигается тем, что установка замыкателей на опорных элементах выполнена с обеспечением непрерывного взаимодействия замыкателей с опорными элементами в процессе азимутального перемещения замыкателей. Такой функциональный признак может быть реализован с помощью различных вариантов технических решений. Например, установка каждого замыкателя может быть выполнена при помощи размещенной в замыкателе азимутальной (т.е. поперечной меридиональной полости),направляющей,взаимодействующей с ползуном, установленным с возможностью поворота на опорном элементе. При этом каждый ползун может быть выполнен в виде призматического тела, цилиндрическая и плоские поверхности которого покрыты антифрикционным материалом. Возможен также вариант выполнения каждого ползуна в виде ролика, при этом ролик может быть бочкообразным, или может состоять из средней и двух боковых частей, в этом случае направляющая выполняется с возможностью контакта одной стороной со средней частью ролика, а другой стороной - с боковыми частями, причем все части ролика устанавливаются с возможностью независимого вращения. В следующем варианте ползун может быть образован плоскими участками опорного элемента, при этом замыкатель снабжается участками поверхности вращения, диаметр которой соответствует ширине меридиональной полости(т.е. на протяжении упомянутых участков возможен поворот вокруг замыкателя меридиональной полости без потери контакта с замыкателем). В следующем варианте направляющая может быть выполнена в виде пластины (рессоры), установленной концами в замыкателе, а каждый ползун - в виде двух вкладышей, размещенных в расточке опорного элемента. При этом средняя часть пластины размещена между вкладышами, а расточка снабжена окнами (проемами) для прохода концов пластины. В следующем варианте установка каждого замыкателя может быть выполнена при помощи непосредственного размещения замыкателя с возможностью поворота на опорном элементе,при этом замыкатель выполнен в виде эксцентрика, центральная ось которого смещена в меридиональном направлении и проведена через центр сферического движения рабочего органа,а диаметр эксцентрика соответствует ширине меридиональной полости. В следующем варианте установка каждого замыкателя может быть выполнена при помощи непосредственного размещения замыкателя с возможностью поворота на опорном элементе,при этом замыкатель выполнен в виде пары соосных эксцентриков, центральные оси которых симметрично разнесены (относительно опорного элемента) в меридиональном направлении и проведены через центр сферического движения рабочего органа, а диаметры эксцентриков соответствуют ширине меридиональной полости. В следующем варианте установка каждого замыкателя может быть выполнена при помощи серьги, шарнирно закрепленной одним концом на опорном элементе, а вторым концом - на пальце, закрепленном на замыкателе. При этом ось пальца смещена в меридиональном направлении и проведена через центр сферического движения рабочего органа. В следующем варианте установка каждого замыкателя может быть выполнена при помощи размещенного на опорном элементе с возможностью поворота двухплечего рычага, на каждом конце которого размещен упор, а замыкатель состоит из двух одинаковых, соединенных между собой упругой связью (например,цилиндpичecкими пружинами) частей (половинок). Каждая часть снабжена кронштейном с пяткой, взаимодействующей со "своим" упором по сферической поверхности. При этом цeнтp сферической поверхности размещен на геометрической оси, проходящей через центр сферического движения рабочего органа и середину меридиональной полости при ее крайнем положении. Для возможности самоустановки замыкателей упоры выполнены в виде плосковыпуклых линз (вкладышей), установленных плоской поверхностью на концах рычага с возможностью перемещения. 4 Реализация объемного устройства представлена в виде компрессора с самодействующими клапанами и в варианте с замыкателями,установленными при помощи направляющих и призматических ползунов, установленных на опорных элементах с возможность поворота. На фиг. 1 изображен продольный разрез(Б-Б) компрессора с частичным видом и рабочего органа и частичным разрезом замыкателя. На фиг. 2 изображен поперечный разрез (А-А) компрессора. На фиг. 3 представлен вариант установки замыкателя при помощи направляющей и ползуна в виде ролика. На фиг. 5 - вариант выполнения замыкателя с элементами тела вращения и установки его при помощи направляющей и выполненного в виде призматического ползуна опорного элемента. На фиг. 6 - вариант установки замыкателя при помощи направляющей в виде пластины и ползуна в виде поворотных вкладышей. На фиг. 7 - вариант выполнения и установки замыкателя на основе эксцентрика. На фиг. 8 - вариант выполнения и установки замыкателя на основе двух эксцентриков. На фиг. 9 - вариант установки замыкателя при помощи серьги. На фиг. 10 - вариант установки замыкателя при помощи двухплечего рычага с упорами на концах. Предлагаемое устройство (компрессор) содержит корпус 1 с установленными по экваториальному разъему опорными элементами 2 в виде полых осей. Рабочий орган 3 снабжен меридиональными полостями 4 с параллельными стенками. Меридиональные полости разделены установленными в них замыкателями 6 на рабочие камеры 7 и 8. Рабочий орган 3 установлен в корпусе 1 с возможностью сферического движения по его сферической поверхности 9. Отдельные варианты реализации азимутальной подвижности замыкателей 6 с обеспечением их непрерывного взаимодействия с опорными элементами 2 представлены на фиг. 3-10. B частности, в предлагаемом устройстве установка замыкателей 6 (фиг. 1, 3) выполнена при помощи направляющих 10, взаимодействующих с призматическими ползунами 11, установленными с возможностью поворота на опорных элементах 2. Привод рабочего органа 3 может быть выполнен любым механизмом, обеспечивающим перемещение конца полюсной оси 12 рабочего органа 3 по замкнутой кривой (преимущественно - по окружности), например при помощи вала с косым кривошипом 14 и противовесами 15. Вал 13 и рабочий орган 3 установлены на подшипниках качения 16 и 17 соответственно. Для работы устройства в качестве компрессора установлены всасывающие клапаны 18 и нагнетательные клапаны 19, объединенные коллектором 20. Подача воздуха осуществлена через каналы 21 в торцах корпуса 1, а отвод - через каналы 22. На фиг. 3 более подробно представлен вариант установки снабженного антифрикцион 5 ным самосмазывающимся покрытием 23 замыкателя 6 при помощи призматического ползуна 11, также снабженного антифрикционными самосмазывающимися покрытиями 24 и 25 на поверхностях, взаимодействующих соответственно, с направляющей 10 и опорным элементом 2. На фиг. 4 представлен вариант установки замыкателя 6 при помощи ползуна в виде ролика 26, установленного на опорном элементе 2 и взаимодействующего с направляющей 10 (вариант выполнения ролика из трех частей не показан). На фиг. 5 представлен вариант установки замыкателя 6, снабженного участками поверхности вращения 27, взаимодействующими с меридиональными стенками 5. При этом установка замыкателя 6 выполнена при помощи опорного элемента 2, снабженного призматическим участком, образующим ползун 11, взаимодействующий с направляющей 10. На фиг. 6 представлен вариант установки замыкателя 6 при помощи выполненной в виде пластины (рессоры) направляющей 10, установленной концами в замыкателе 3, взаимодействующей с ползуном 11, выполненным в виде двух вкладышей, размещенных с возможностью поворота в опорном элементе 2. Опорный элемент 2 снабжен осевой расточкой 28 с окнами 29 для прохода концов направляющей 10. При этом поверхность взаимодействия ползуна 11(вкладышей) с опорным элементом 2 может иметь сферическую форму для самоустановки ползуна 11 относительно направляющей 10. На фиг. 7 представлен вариант установки замыкателя при выполнении замыкателя 6 в виде эксцентрика и его установки на опорном элементе 2 с возможностью поворота. При этом центральная ось 30 эксцентрика (т.е. ось участков поверхности вращения 31) смещена в меридиональном направлении и проведена через центр 32 (фиг. 1, 2) сферического движения рабочего органа 3. На фиг. 8 представлен вариант установки замыкателя при выполнении замыкателя 6 в виде пары эксцентриков 33, 34, соосно установленных на опорном элементе 2 с возможностью поворота. При этом, центральные оси 35, 36 эксцентриков (т.е. оси участков поверхностей вращения 37 и 38) смещены в меридиональном направлении и проведены через центр 32 сферического движения рабочего органа 3. На фиг. 9 представлен вариант установки замыкателя 6 при помощи серьги 39, шарнирно закрепленной одним концом на опорном элементе 2, а вторым концом - на пальце 40, закрепленном на замыкателе 6. При этом ось 41 пальца 40 смещена в меридиональном направлении и проведена через центр 32 сферического движения рабочего органа 3. На фиг. 10 представлен вариант установки замыкателя при выполнении замыкателя 6 из двух одинаковых частей 42 и 43, соответственно 6 снабженных кронштейнами 44 и 45, и пятками 46 и 47. При этом на опорном элементе 2 установлен двухплечий рычаг 48, на концах которого размещены упоры 49, 50, взаимодействующие с пятками 46, 47 по сферическим поверхностям 51, 52. Центры 53, 54 сферических поверхностей 51, 52 размещены на пересечении линии равнодействующей силы давления рабочего тела с геометрической осью 55, 56, проходящей через центр 32 сферического движения рабочего органа 3 и середину меридиональной полости 4 при ее крайних положениях (см. фиг. 1). При этом положения центров 53, 54 в зависимости от конструкции замыкателя, могут находиться за его пределами. Части 42 и 43 соединены между собой упругой связью, например, цилиндрическими пружинами 57. Для самоустановки упоры 49, 50 выполнены в виде плосковыпуклых линз 58, плоскими поверхностями установленными на концах рычага 48 с возможностью перемещения. Устройство (компрессор) работает следующим образом. При перемещении конца полюсной оси 12 по окружности при помощи вала 13 и косого кривошипа 14, рабочий орган 3 совершает сферическое движение, при котором условные оси 55 - 56, проходящие через середины меридиональных полостей 4, описывают узкие, вытянутые в меридиональном направлении восьмерки, а рабочие камеры 7 и 8 поочередно изменяют свой объем, причем одинаковые процессы происходят в диаметрально противоположных рабочих камерах, что уравновешивает силы давления рабочего тела на рабочий орган 3. Циркуляция смещенных из-за наклона рабочего органа 3 его полюсных масс и появление, соответственно, центробежных сил уравновешивается циркуляцией масс противовесов 15 сколь угодно точно. При увеличении объемов рабочих камер воздух через каналы 21 в торцах корпуса 1 и открытые всасывающие клапаны 18 заполняет рабочие камеры, а при уменьшении объема рабочих камер вытесняется через нагнетательные клапаны 19 в коллектор 20 и далее,через канал 22, поступает потребителю. При достаточном объеме коллектора 20 и с учетом большого числа рабочих камер равномерность подачи сжатого воздуха может быть обеспечена без внешнего ресивера. В процессе сферического движения рабочего органа замыкатели 6 призматического вида поворачиваются по оси опорных элементов 2. Дополнительно замыкатели 6 любого вида требуют определенной азимутальной подвижности. Это следует из кинематического анализа, который показывает, что перемещение меридиональной полости 4 относительно замыкателя 6 можно условно разделить на две фазы. В первой фазе, когда меридиональная полость 4 находится в крайнем положении (плоскость проходящая продольно через середину меридиональной полости 4 совпадает с плоскостью, проходящей через полюсную 7 ось 15 и ось вала 13), ее перемещение носит преимущественно поворотный характер вокруг условной оси 55-56, проходящей через середину меридиональной полости 4 и центр 32 сферического движения рабочего органа 3. При этом упомянутая ось 55 - 56 может выходить за пределы замыкателя 6, а поворот меридиональной полости 4 и, соответственно, жестко связанных ее меридиональных стенок 5 приводит к необходимости некоторого азимутального смещения замыкателя 6 в сторону поворота меридиональной полости 4. Величина азимутального смещения определяется углом между условной осью,проходящей через середину замыкателя 6(обычно расположенной в плоскости экватора корпуса 1) и осью 55-56, т.е. определяется углом наклона полюсной оси 12 относительно оси вала 13, при этом азимутальные смещения замыкателей 6 попарно противоположны. Во второй фазе, когда меридиональная полость 4 находится в среднем положении (при этом плоскость, проходящая через середину меридиональной полости 4, нормальна плоскости, проходящей через полюсную ось 12 и ось вала 13), ее перемещение носит преимущественно сферическипоступательный характер, а азимутальное смещение проходит через ноль, когда ось 55-56 совпадает с осью, проходящей через середину замыкателя 6 (экватор корпуса 1). Так как рабочий орган 3 выполнен в виде твердого тела и установлен шарнирно на кривошипе 14, то в процессе работы замыкатели 6 знакопеременно смещаются в азимутальном направлении от некоторого своего среднего положения относительно корпуса 1. При этом на замыкатели 6 действуют знакопеременные силы давления рабочего тела, вызывающие, при установке их с существенным зазором на опорных элементах 2,появление сил заклинивания и меридиональных вибраций замыкателей 6. Уменьшение сил заклинивания и исключение вибраций требует непрерывности кинематического взаимодействия замыкателей 6 с опорными элементами 2, а через них и с корпусом 1. Иначе говоря, необходимо поддерживать непрерывное контактирование между замыкателями 6 и опорными элементами 2 в процессе азимутального перемещения замыкателей 6. При этом- (фиг. 1, 2, 3) замыкатель 6 и направляющая 10 перемещается азимутально относительно призматического ползуна 11 под действием знакопеременных сил давления меридиональных стенок 5 на замыкатель 6, т.е. сил, возникающих из-за особенностей сферического движения объединенных в рабочий орган 3 меридиональных полостей 4 относительно замыкателей 6. Одновременно каждый ползун 11 дополнительно качается на опорном элементе 2, отслеживая положение своей меридиональной полости 4. Наличие антифрикционных самосмазывающихся покрытий 23, 24, 25 (фиг. 3) характерно 8 для компрессоров с минимальным содержанием масла в сжимаемом воздухе;- (фиг. 4) замыкатель 6 и направляющая 10 перемещается азимутально и качается относительно ползуна в виде ролика 26, при этом ролик 26 может быть бочкообразным. Такая форма ролика способствует самоустановке замыкателя 6. Вариант (не показан) ролика 26 из трех независимых частей способствует исключению ходовых зазоров между роликом 26 и направляющей 10, так как появляется возможность взаимодействия ползуна (составного ролика 26) с заданным натягом;- (фиг. 5) замыкатель 6 и направляющая 10 перемещается только азимутально относительно ползуна 11 (т.е. опорного элемента 2), а меридиональная полость 4 своими стенками 5 обкатывается (качается) вокруг поверхностей 27 замыкателя 6,- (фиг. 6) замыкатель 6 и направляющая(рессора) 10 перемещается азимутально между двумя вкладышами, образующими ползун 11,в свою очередь, качающийся в осевой расточке 28 опорного элемента 2. Замыкатель 6, соединенный с выходящими через окна 29 концами направляющей 10, получает возможность азимутального перемещения и качания;- (фиг. 7) кинематика замыкателя 6 соответствует сферической кинематике эксцентрика,поворачивающегося вокруг опорного элемента 2. При этом центральная ось 30 и, соответственно, участки поверхности вращения 31 замыкателя 6 азимутально перемещаются за счет поворота вокруг опорного элемента 2, одновременно меридиональные стенки 5 обкатываются вокруг поверхностей вращения 31 в соответствии с движением рабочего органа 3;- (фиг. 8) кинематика замыкателя 6 соответствует сферической кинематике пары эксцентриков 33, 34, поворачивающихся вокруг опорного элемента 2 при азимутальном перемещении замыкателя 6 навстречу друг другу, а при отслеживании поворота меридиональной полости 4 - поворачивающихся в одну сторону,при этом меридиональные стенки 5 обкатываются вокруг участков поверхностей вращения 37 и 38 с соответствующими осями 35, 36;- (фиг. 9) замыкатель 6 азимутально перемещается за счет поворота серьги 39 вокруг опорного элемента 2 и пальца 40 с осью 41,причем угол поворота определяется как необходимой величиной азимутального смещения замыкателя 6, так и его соответствием положению своей меридиональной полости 4;- (фиг. 10) замыкатель 6, состоящий из двух одинаковых частей 42 и 43 (одна из них,например, 42 максимально нагружена силами давления рабочего тела), азимутально перемещается за счет их совместного поворота на нагруженном кронштейне 44 и его пятке 46 вокруг сферической поверхности 52 с центром 54, т.е. на соответствующем упоре 50, находящемся на 9 конце двухплечего рычага 48. При этом, одновременно рычаг 48 поворачивается на опорном элементе 2, позволяя замыкателю 6 отслеживать поворот своей меридиональной полости 4. В данном случае, ненагруженная часть 43 замыкателя 6, его кронштейн 45 с пяткой 47 также проворачивается вокруг сферической поверхности 51 упора 49, но в противоположном направлении относительно части 42 и без силового взаимодействия. Уменьшающееся при этом расстояние между частями 42 и 43 выбирается цилиндрическими пружинами 57. При смене направления сил давления рабочего тела нагруженной становится часть 43, кронштейн 45 с пяткой 47, опирающейся на сферическую поверхность 50 упора 49 на другом конце двухплечего рычага 48, и процесс повторяется. В процессе работы пятки 46 и 47 самоустанавливаются за счет подвижности линз 58 на плоских поверхностях упоров 49, 50. Предлагаемое выполнение объемного устройства с установкой замыкателей, обеспечивающей их беззазорное азимутальное перемещение, позволяет уменьшить механические потери и влияние динамических сил, действующих на рабочие элементы, причем предпочтительность вариантов установки и формы замыкателей зависит от конкретной реализации объемного устройства. Так, например:- фиг. 3, 4 пневмогидроустройства с относительно малыми утечками рабочего тела;- фиг. 5, 7, 8 - пневмогидроустройства с увеличенными утечками рабочего тела и повышенным числом оборотов, за счет исключения действия сил инерции поворота замыкателя;- фиг. 6, 9 - гидропневмоустройства и устройства на горячем газе, с большим давлением рабочего тела, особенно в начальный момент- фиг. 10 - прежде всего ДВС, так как здесь механические потери минимальны в начальный момент высокого давления рабочего тела, а для такой остановки замыкателей характерно минимальное относительное перемещение нагруженных элементов (пятки и сферической поверхности упора) по сравнению с другими вариантами установки замыкателей. Источники информации: 1. А.с. СССР 918450 Машина Голубева В.И 2. А.с. СССР 1232830 Машина Голубева В.И. с качающимся рабочим органом. 3. А.с. СССР 1232831 Машина Голубева В.И. с качающимся рабочим органом. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Объемное устройство, содержащее корпус с опорными элементами, рабочий орган,снабженный меридиональными полостями и установленный с возможностью сферического движения, замыкатели, размещенные в мери 003880 10 диональных полостях с образованием рабочих камер и установленные на опорных элементах с возможностью азимутального перемещения,элементы привода рабочего органа и элементы подвода и отвода рабочего тела, отличающееся тем, что установка замыкателей на опорных элементах выполнена, с обеспечением непрерывного взаимодействия замыкателей с опорными элементами в процессе азимутального перемещения замыкателей. 2. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи размещенной в замыкателе азимутальной направляющей, взаимодействующей с ползуном, установленным с возможностью поворота на опорном элементе. 3. Объемное устройство по п.2, отличающееся тем, что каждый ползун выполнен в виде призматического тела, цилиндрическая и плоские поверхности которого покрыты антифрикционным материалом. 4. Объемное устройство по п.2, отличающееся тем, что каждый ползун выполнен в виде ролика. 5. Объемное устройство по п.4, отличающееся тем, что ролик выполнен бочкообразным. 6. Объемное устройство по п.4, отличающееся тем, что ролик состоит из средней и двух боковых частей, направляющая выполнена с возможностью контакта одной стороной со средней частью ролика, а другой стороной - с его боковыми частями, при этом все части ролика установлены с возможностью независимого вращения. 7. Объемное устройство по п.2, отличающееся тем, что ползун образован плоскими участками опорного элемента, а замыкатель снабжен участками поверхности вращения, диаметр которой соответствует ширине меридиональной полости. 8. Объемное устройство по п.2, отличающееся тем, что направляющая выполнена в виде пластины, установленной концами в замыкателе, а каждый ползун - в виде двух вкладышей,размещенных в расточке опорного элемента,при этом средняя часть пластины размещена между вкладышами, а расточка снабжена окнами для прохода концов пластины. 9. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи непосредственного размещения замыкателя с возможностью поворота на опорном элементе, при этом замыкатель выполнен в виде эксцентрика, центральная ось которого смещена в меридиональном направлении и проведена через центр сферического движения рабочего органа, а диаметр эксцентрика соответствует ширине меридиональной полости. 10. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи непосредственного размещения замыкателя с возможностью поворота на опорном элементе, при этом замыкатель выполнен в виде пары соосных эксцентриков, центральные оси которых симметрично разнесены в меридиональном направлении и проведены через центр сферического движения рабочего органа, а диаметр каждого эксцентрика соответствует ширине меридиональной полости. 11. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи серьги, шарнирно соединенной одним концом с опорным элементом, а вторым концом - с пальцем, закрепленным на замыкателе,при этом ось пальца смещена в меридиональном направлении и проведена через центр сферического движения рабочего органа. 12. Объемное устройство по п.1, отличающееся тем, что установка каждого замыкателя выполнена при помощи размещенного на опор 12 ном элементе с возможностью поворота двуплечего рычага, на каждом конце которого размещен упор, а замыкатель состоит из двух одинаковых, соединенных между собой упругой связью частей, каждая часть которого снабжена кронштейном с пяткой, взаимодействующей с упором по сферической поверхности, при этом центр сферической поверхности, размещен на геометрической оси, проходящей через центр сферического движения рабочего органа и середину меридиональной полости при ее крайнем положении. 13. Объемное устройство по п.12, отличающееся тем, что упоры выполнены в виде плосковыпуклых линз, установленных плоской поверхностью на концах рычага с возможностью перемещения.
МПК / Метки
МПК: F01C 9/00
Метки: машина, объемное, устройство, голубева
Код ссылки
<a href="https://eas.patents.su/7-3880-obemnoe-ustrojjstvo-mashina-golubeva.html" rel="bookmark" title="База патентов Евразийского Союза">Объемное устройство “машина голубева”</a>
Машина для подкопа трубопровода и гусеничное ходовое устройство
Номер патента: 747
Опубликовано: 28.02.2000
Авторы: Быков Александр Владимирович, Черняев Валерий Давыдович, Яковлев Виктор Иванович, Лейченко Юрий Борисович, Кумылганов Александр Семенович, Василенко Станислав Кузьмич, Мусийко Владимир Данилович, Савенок Василий Иванович, Джарджиманов Александр Сергеевич, Коваль Андрей Борисович, Ибрагимов Марат Шарипович
МПК: E02F 5/04
Метки: машина, подкопа, устройство, гусеничное, трубопровода, ходовое
Формула / Реферат:
1. Машина для подкопа трубопровода, включающая раму (1), смонтированное на раме (1) приводное ходовое устройство (3) для перемещения машины по трубопроводу, и, по меньшей мере, один рабочий орган (4, 5), включающий стойку (6), смонтированную на раме с возможностью принудительного поворота вокруг вертикальной оси (7), приводную часть (8) для разработки грунта под трубопроводом, установленную на нижней части стойки (6) и расположенную сбоку от...
Машина для послойной разработки грунта
Номер патента: 1395
Опубликовано: 26.02.2001
Авторы: Быков Александр Владимирович, Коваль Андрей Борисович, Яковлев Виктор Иванович, Кушнир Ефим Абрамович, Черняев Валерий Давыдович, Мовчан Алий Андреевич, Василенко Станислав Кузьмич, Мусийко Владимир Данилович, Кумылганов Александр Семенович, Мамонтов Юрий Михайлович
МПК: E02F 3/08
Метки: грунта, разработки, послойной, машина
Формула / Реферат:
1. Машина для послойной разработки грунта, содержащая базовое шасси (1), эвакуатор грунта (2), рабочий орган (3) и устройство (4) навески рабочего органа (3) на базовое шасси (1), выполненное в виде связанных друг с другом посредством первого шарнирного соединения (9) рам (7, 8), на первой (7) из которых смонтирован рабочий орган (3), а вторая (8) - навешена на базовое шасси (1) посредством средства, включающего второе шарнирное соединение (11),...
Машина для производства землеройных и / или / грузоподъемных работ
Номер патента: 1661
Опубликовано: 25.06.2001
Авторы: Пономарев Вячеслав Александрович, Кудрявцев Сергей Анатольевич, Минухин Илья Абрамович, Стреленко Александр Степанович, Михайлин Игорь Андреевич, Утегенов Амангос Титаувич, Малюгов Игорь Иванович, Жеребин Сергей Борисович, Волосатов Вячеслав Владимирович, Туркин Александр Константинович
МПК: B66C 13/12, E02F 9/20, E02F 3/00...
Метки: землеройных, грузоподъемных, работ, машина, производства
Формула / Реферат:
1. Машина для производства землеройных и (или) грузоподъемных работ, содержащая опорно-поворотное устройство, платформу, закрепленную на вращающейся части опорно-поворотного устройства, рабочее оборудование и электропривод, установленные на платформе, и снабженный кожухом кольцевой токоприемник, вращающаяся часть которого связана с платформой, а неподвижная - с невращающейся частью опорно-поворотного устройства, отличающаяся тем, что она...
Машина для вскрытия трубопровода и рабочий орган
Номер патента: 749
Опубликовано: 28.02.2000
Авторы: Мамонтов Юрий М., Мусийко Владимир Данилович, Быков Александр Владимирович, Василенко Станислав Кузьмич, Яковлев Виктор Иванович, Кумылганов Александр Семенович, Ибрагимов Марат Шарипович, Джарджиманов Александр Сергеевич, Мовчан Алий А., Черняев Валерий Давыдович, Решетников Владимир П.
МПК: E02F 5/06
Метки: орган, вскрытия, трубопровода, машина, рабочий
Формула / Реферат:
1. Машина для вскрытия трубопровода, включающая базовое шасси (1) и рабочее оборудование (2), включающее в себя раму (3) с эвакуатором грунта (4), которая шарнирно связана с базовым шасси (1) с возможностью поворотов в горизонтальной и вертикальной плоскостях, рабочий орган (5), который выполнен в виде цепных секций (19), смонтированных на раме (3) с эвакуатором грунта (4), копирное устройство (6), выполненное в виде опоры (27) на трубопровод...
Устройство для измельчения материалов
Номер патента: 3652
Опубликовано: 28.08.2003
Автор: Гиззатулина Яна Леонидовна
МПК: B02C 23/00
Метки: материалов, устройство, измельчения
Формула / Реферат:
1. Устройство для измельчения материалов, содержащее корпус с неподвижными рабочими органами, между которыми размещен подвижный рабочий орган, загрузочный и выгрузочный патрубки, отличающееся тем, что корпус выполнен герметичным, снабжен вибратором, газоподводящими и газоотводящими патрубками, подвижный и каждый неподвижный рабочие органы составлены из двух разновеликих трапецеидальных головных и хвостовых частей, при этом меньшее основание...
Предыдущий патент: Способ и устройство для подводной выемки грунта
Следующий патент: Полый пластиковый профиль
Случайный патент: Способ получения воды с контролируемой минерализацией