Система и способ буксирования сейсмоприемной косы
Номер патента: 21094
Опубликовано: 30.04.2015
Авторы: Карлсен Кеннет, Хэррик Брюс Уильям, Эустад Мартин, Рёссберг Кнут, Эдланд Свенд, Ронесс Марит
Формула / Реферат
1. Система для буксирования морской геофизической сейсмоприемной косы, содержащая
ряд буксировочных тросов, проходящих от буксирующего судна; и
для каждого буксировочного троса переднее концевое устройство сейсмоприемной косы, подсоединенное к заднему концу буксировочного троса;
сейсмоприемную косу, подсоединенную передним концом к переднему концевому устройству, при этом сейсмоприемная коса содержит ряд геофизических датчиков, размещенных с пространственным разнесением по длине сейсмоприемной косы;
плавучее устройство, подсоединенное отходящим от него тросом к сейсмоприемной косе вблизи ее переднего конца;
лебедку, расположенную на плавучем устройстве, для вытягивания и втягивания троса;
датчик глубины, расположенный вблизи переднего конца сейсмоприемной косы;
контроллер для обмена сигналами с лебедкой и датчиком глубины, выполненный с возможностью управления лебедкой таким образом, чтобы поддерживать передний конец сейсмоприемной косы на выбранной глубине в водоеме; и
заглубитель, подсоединенный к одной из крайних боковых сейсмоприемных кос вблизи ее переднего конца.
2. Система по п.1, отличающаяся тем, что датчик глубины содержит датчик давления.
3. Система по п.1, отличающаяся тем, что содержит связанные с каждым плавучим устройством аккумуляторную батарею, подсоединенную к лебедке и к контроллеру для обеспечения их электропитания, и электрогенератор, подсоединенный к аккумуляторной батарее, причем привод электрогенератора обеспечивается движением плавучего устройства в водоеме.
4. Система по п.1, отличающаяся тем, что содержит радиочастотный приемопередатчик, размещенный на каждом плавучем устройстве и на буксирующем судне для передачи сигналов, относящиеся к выбранной глубине в водоеме.
5. Система по п.1, отличающаяся тем, что заглубители прилагают направленное вниз усилие к переднему концу сейсмоприемной косы, с которой они соединены, в водоеме.
6. Система по п.1, отличающаяся тем, что геофизические датчики представляют собой электроды, магнитометры или датчики температуры или представляют собой существенно связанные сейсмические датчики движения частиц и датчики временного градиента давления.
7. Система по п.1, отличающаяся тем, что каждый датчик глубины измеряет вращение лебедки.
8. Способ буксирования сейсмоприемных кос в водоеме с использованием системы по пп.1-7, включающий следующие шаги:
протягивают ряд буксировочных тросов с буксирующего судна, движущегося в водоеме, к соответствующим передним концевым устройствам, пространственно разнесенным в поперечном направлении, причем передние концевые устройства подсоединены к передним концам расположенных в водоеме соответствующих сейсмоприемных кос, при этом каждая сейсмоприемная коса содержит ряд геофизических датчиков, размещенных с пространственным разнесением по длине сейсмоприемной косы;
подвешивают каждую сейсмоприемную косу в точке подвеса, находящейся вблизи ее переднего конца, на плавучем устройстве рядом с поверхностью водоема;
регулируют длину троса между каждой точкой подвеса и каждым плавучим устройством таким образом, чтобы поддерживать каждую точку подвеса на выбранной глубине в водоеме; и
прикладывают посредством заглубителя направленную вниз силу вблизи точки подвеса одной из крайних боковых сейсмоприемных кос.
9. Способ по п.8, отличающийся тем, что глубину в воде переднего конца сейсмоприемной косы определяют путем измерения давления в воде.
10. Способ по п.8, отличающийся тем, что приложение направленной вниз силы предусматривает крепление груза вблизи точек подвеса крайних боковых сейсмоприемных кос.
11. Способ по п.8, отличающийся тем, что приложение направленной вниз силы предусматривает создание гидродинамической подъемной силы вблизи точек подвеса крайних боковых сейсмоприемных кос.
12. Способ по п.8, отличающийся тем, что геофизические датчики представляют собой электроды, магнитометры или датчики температуры или представляют собой существенно связанные сейсмические датчики движения частиц и датчики временного градиента давления.
13. Способ по п.8, отличающийся тем, что дополнительно определяют глубину в водоеме переднего конца сейсмоприемной косы путем измерения вращения лебедки, расположенной на плавучем устройстве, с которого подвешена сейсмоприемная коса, причем посредством вращения регулируют длину троса.

Текст
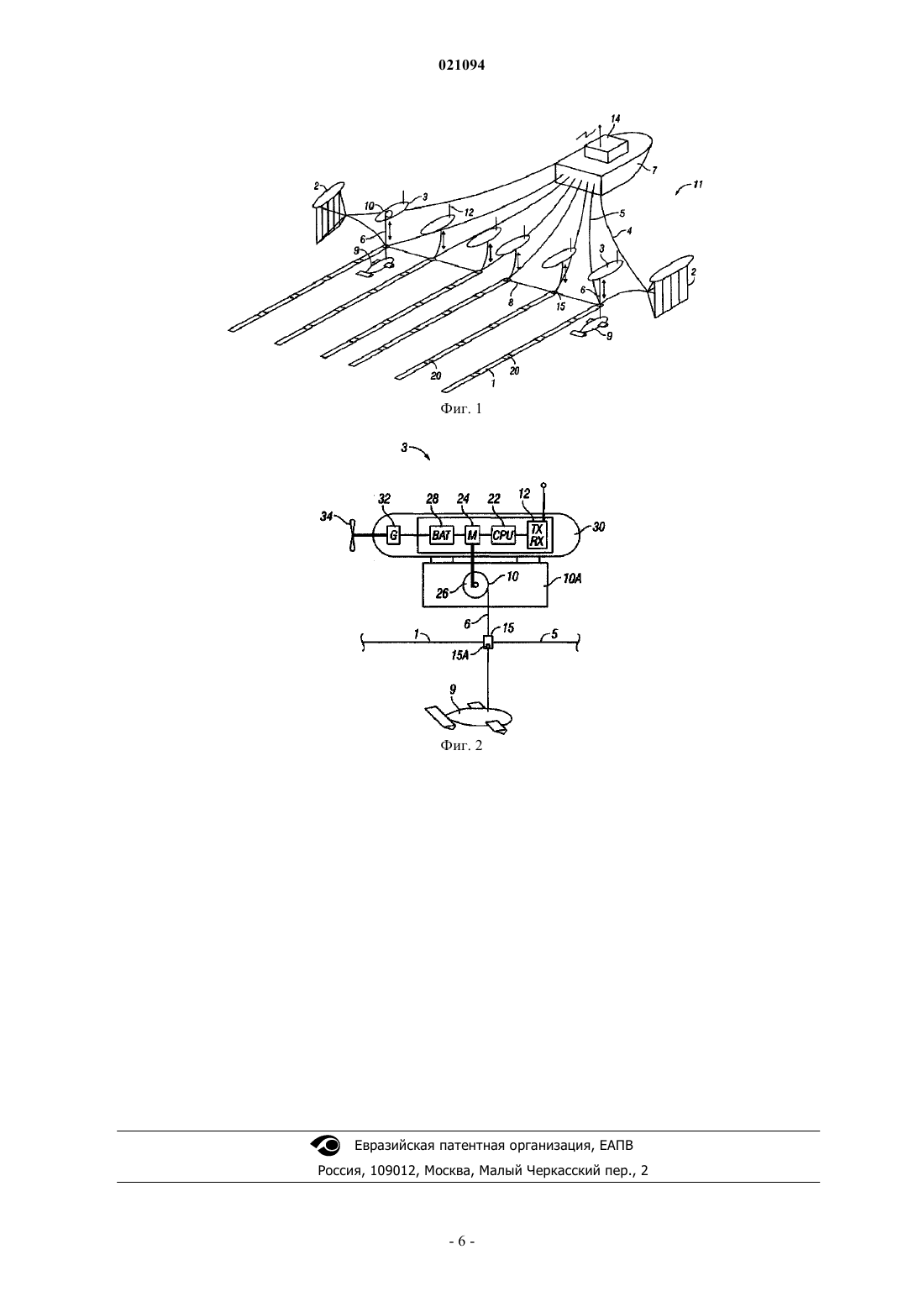
СИСТЕМА И СПОСОБ БУКСИРОВАНИЯ СЕЙСМОПРИЕМНОЙ КОСЫ Система для буксирования морской геофизической сейсмоприемной косы включает буксировочный трос, проходящий с буксирующего судна. Переднее концевое устройство сейсмической косы подсоединено к концу буксировочного троса и к переднему концу сейсмической косы. Плавучее устройство подсоединено тросом вблизи переднего концевого устройства. На плавучем устройстве расположена лебедка для вытягивания и втягивания троса. Датчик глубины расположен рядом с передним концевым устройством. Предусмотрен контроллер для обмена сигналами с лебедкой и датчиком глубины, чтобы поддерживать передний конец сейсмической косы на выбранной глубине в водоеме. Карлсен Кеннет, Эустад Мартин,Ронесс Марит, Эдланд Свенд, Рссберг Кнут (NO), Хэррик Брюс Уильям (US) Хмара М.В., Рыбаков В.М. (RU)(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) Область техники, к которой относится изобретение Настоящее изобретение в целом относится к области морской геофизической разведки с использованием буксируемых сейсмических кос. Конкретнее, изобретение относится к устройствам управления глубиной буксирования переднего конца геофизической сейсмоприемной косы. Предшествующий уровень техники Морская геофизическая разведка включает применение сейсморазведочных систем. Сейсморазведочные системы используются для получения сейсмических данных из формаций геологической среды,расположенных ниже подошвы водного слоя, например, озера или океана. Как правило, морские сейсморазведочные системы включают сейсморазведочное судно, на борту которого находятся навигационное оборудование, оборудование управления сейсмическими источниками и аппаратура записи данных. Сейсморазведочное судно, как правило, выполнено с возможностью буксирования в воде одной или нескольких сейсмических кос. В выбранные моменты времени оборудование управления сейсмическими источниками вызывает активацию одного или нескольких сейсмических источников (которые могут буксироваться в воде сейсморазведочным судном или другим судном). Сигналы, формируемые различными датчиками на одной или нескольких сейсмических косах, поступают, в конечном счете, на записывающее оборудование, где запись сигналов, формируемых каждым датчиком (или группой таких датчиков) выполняется в зависимости от времени. В дальнейшем записанные сигналы интерпретируются для вывода заключения о строении и составе формаций геологической среды, расположенных ниже подошвы водного слоя. Одна или несколько сейсмических кос представляют собой в самом широком смысле длинные кабели с сейсмическими датчиками, расположенными в пространственно разнесенных местах по длине кабелей. Типовая сейсмическая коса может тянуться за сейсморазведочным судном на несколько километров. Из-за большой длины типовой сейсмической косы она не может полностью перемещаться по прямой линии за сейсморазведочным судном в каждой точке вдоль своей длины в связи с тем, что, помимо прочих факторов, сейсмическая коса взаимодействует с водой и течениями в воде. В последнее время были разработаны морские системы сбора сейсмических данных, которые включают ряд таких сейсмических кос, буксируемых параллельно друг другу сейсморазведочным судном. Сейсмические косы буксируются судном с помощью буксировочных устройств и сопутствующего оборудования, которое поддерживает сейсмические косы на выбранных боковых расстояниях друг от друга в то время, как происходит их буксирование в воде. Такие системы с несколькими сейсмическими косами применяются при сейсморазведке, известной под названием трехмерной и четырехмерной. Четырехмерная сейсморазведка представляет собой трехмерную съемку, повторяющуюся в выбранные моменты времени на одном и том же участке геологической среды. Отдельные сейсмические косы в таких системах оказываются под воздействием тех же самых сил, которые воздействуют на единственную сейсмическую косу. На качество изображений геологической среды, получаемых с помощью трехмерной сейсморазведки, влияет точность, с которой осуществляется управление положением отдельных датчиков в сейсмических косах. Качество изображений, формируемых по сейсмическим сигналам, в некоторой степени зависит также от относительного расположения сейсмоприемников, поддерживаемого в течение всего процесса сейсморазведки. Специалистам известны различные устройства для позиционирования сейсмических кос в поперечном направлении и (или) на выбранной глубине ниже водной поверхности. Например,в патенте США 5443027, выданном Owsley и др., описано устройство передачи бокового усилия для смещения буксируемого подводного акустического кабеля, которое обеспечивает смещение в горизонтальном и вертикальном направлениях. В устройстве имеется полый патрубок и фюзеляж с крыльями,смонтированный осесимметрично. Полый патрубок монтируется на кабеле, при этом кабельные элементы пропускаются через него. Фюзеляж с крыльями выполнен с верхней половиной, обладающей относительной положительной плавучестью, и нижней половиной, обладающей относительной отрицательной плавучестью. Фюзеляж с крыльями смонтирован возле полого патрубка с образованием зазора, позволяющего фюзеляжу с крыльями вращаться. Различие в плавучести между верхней и нижней половинами фюзеляжа поддерживает устройство в правильном рабочем положении. Крылья на фюзеляже расположены под углом, обеспечивающим подъем в нужном направлении в то время, когда фюзеляж с крыльями буксируется по воде. Однако устройство, описанное в патенте, выданном Owsley и др., не обеспечивает активное управление направлением или глубиной сейсмической косы. В патенте США 6011752, выданном Ambs и др., описан модуль управления положением сейсмической косы, имеющий корпус с первым и вторым торцом и каналом, проходящим от первого торца ко второму для приема сейсмической косы. На модуле имеется по меньшей мере одна поверхность управления и по меньшей мере одно углубление, в котором первоначально располагается по меньшей мере одна поверхность управления. По меньшей мере одна поверхность управления подвижно присоединена к корпусу для перемещения внутрь и наружу по меньшей мере одного углубления и для перемещения в выдвинутом из корпуса состоянии для корректировки ориентации. В общем случае устройство, описанное в патенте, выданном Ambs и др., имеет несколько больший диаметр, даже в закрытом состоянии, чем сейсмическая коса, к которой оно крепится, и такой диаметр может стать проблемой при развертывании и извлечении сейсмических кос из воды. В патенте США 6144342, выданном Bertheas и др., описан способ навигационного управления буксируемой сейсмической косой с помощью регуляторов глубины погружения, прикрепленных к внешней части сейсмической косы. Регуляторы глубины погружения оборудованы крыльями с изменяемым углом установки и закреплены на сейсмической косе с возможностью свободного вращения. Благодаря дифференциальному воздействию крылья позволяют регуляторам поворачиваться вокруг продольной оси сейсмической косы таким образом, что возникает гидродинамическая сила, ориентированная в любом заданном направлении относительно продольной оси сейсмической косы. Сигналы питания и управления передаются между сейсмической косой и регулятором с помощью вращающихся трансформаторов. Регулятор крепится к сейсмической косе с помощью канала, закрытого крышкой. Регулятор может отсоединяться автоматически при подъеме сейсмической косы, чтобы коса могла свободно наматываться на барабан. Описанный способ предположительно обеспечивает полное управление деформацией, погружением и направлением движения сейсмической косы. Важно также управлять глубиной расположения сейсмических кос в воде, чтобы можно было контролировать эффекты отражения сейсмического сигнала от границы вода-воздух. Существует необходимость в устройствах для управления глубиной переднего конца сейсмической косы в группе сейсмических кос, находящихся в воде. Хотя объяснение необходимости в настоящем изобретении в целом дано на примере сейсморазведки, важно понимать, что изобретение применимо к любой системе съемки, которая включает ряд сейсмических кос, пространственно разнесенных в поперечном направлении и буксируемых судном. Такие другие типы сейсмических кос могут включать, без ограничений, электроды, магнитометры и датчики температуры. Соответственно, объем изобретения не ограничивается сейсмическими косами. Сущность изобретения Система для буксирования морской геофизической сейсмоприемной косы в соответствии с одним аспектом изобретения включает буксировочный трос, проходящий с буксирующего судна. Переднее концевое устройство сейсмоприемной косы подсоединено к концу буксировочного троса и к переднему концу сейсмоприемной косы. Устройство для обеспечения плавучести (плавучее устройство) подсоединено тросом вблизи переднего концевого устройства. На плавучем устройстве расположена лебедка для вытягивания и втягивания троса. Датчик глубины расположен рядом с передним концевым устройством. Контроллер подключен для обмена сигналами с лебедкой и датчиком глубины, чтобы поддерживать передний конец сейсмоприемной косы на выбранной глубине в водоеме. В некоторых примерах рядом с передним концевым устройством подсоединен заглубитель. Заглубитель прикладывает направленную вниз силу вблизи переднего концевого устройства. Способ буксирования морской сейсмоприемной косы в соответствии с другим аспектом изобретения включает протягивание буксировочного троса от буксирующего судна, которое движется в водоеме,к переднему концевому устройству. Переднее концевое устройство подсоединено к переднему концу расположенной в воде сейсмоприемной косы. Сейсмоприемную косу подвешивают так, что ее передний конец находится вблизи устройства для обеспечения плавучести рядом с поверхностью воды. Длину троса, протянутого между устройством для обеспечения плавучести и точкой подвеса, изменяют таким образом, чтобы поддерживать передний конец сейсмической косы на выбранной глубине в воде. В некоторых примерах направленная вниз сила приложена вблизи переднего концевого устройства. Прочие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Краткий перечень фигур чертежей На фиг. 1 представлена косая проекция системы сейсмических кос, использующей устройства управления глубиной переднего конца сейсмической косы в соответствии с настоящим изобретением. На фиг. 2 более подробно представлен один из комбинированных блоков, включающих устройство обеспечения плавучести и лебедку на фиг. 1. Сведения, подтверждающие возможность осуществления изобретения Группа геофизических сейсмических кос, буксируемых сейсморазведочным судном, показана в косой проекции на фиг. 1. Судно 7 движется по поверхности водоема 11. Судно 7 везет оборудование сбора сейсморазведочных данных, обозначенное в целом позицией 14 и для удобства называемое "записывающей системой" 14. Записывающая система 14 включает (не показанные отдельно) устройства для определения геодезического положения судна 7, устройства для записи сигналов, генерируемых каждым из ряда геофизических датчиков 20, устройства для активации геофизического источника (не показаны на фиг. 1), если такой источник используется, и, в некоторых примерах, устройства для управления размещением одной или нескольких лебедок переднего конца сейсмической косы 10, каждая из которых размещается в соответствующем устройстве обеспечения плавучести 3. Судно 7 может буксировать одну или несколько сейсмических кос 1. Каждая из сейсмических кос 1 может быть соединена с буксировочным тросом-кабелем 5, который передает движение судна 7 к переднему концу каждой сейсмической косы 1 через переднее концевое устройство 15. Если используется ряд сейсмических кос 1, как показано на фиг. 1, как правило, сейсмические косы 1 будут буксироваться в пространственно разнесенных в поперечном направлении положениях за сейсморазведочным судном 7. Поперечное (боковое) разделение может достигаться за счет размещения устройства для отклонения, или"паравана" 2 на конце каждого из двух канатов параванов 4 (которые также называются "сверхширокие" канаты). Параваны 2 создают боковое усилие, направленное наружу относительно направления движения судна 7, и прикладывают такое боковое усилие к распределительным тросам 8, подсоединенным к ним и между передним концевым устройством 15 сейсмической косы. Как показано на фиг. 1, представляющем собой одну из возможных конфигураций, распределительный трос 8 между двумя находящимися в центре передними концевыми устройствами 15 отсутствует. В каждой из сейсмических кос 1 имеется ряд геофизических датчиков 20, размещаемых по длине сейсмической косы 1. В настоящем примере геофизические датчики могут представлять собой существенно связанные сейсмические датчики движения частиц и датчики временного градиента давления (не показанные отдельно). Пример таких измерительных устройств в морской сейсмической косе и ее конструкции представлен в патенте США 7239577, выданном Tenghamn и др. и находящемся в совместном владении с настоящим изобретением. Следует ясно понимать, что настоящее изобретение в равной степени применимо к другим типам геофизических датчиков, которые могут буксироваться в водоеме, и которые может потребоваться поддерживать на выбранной глубине в водоеме при проведении сейсморазведочных работ. Соответственно, тип геофизического датчика не ограничивает объем настоящего изобретения. В настоящем примере, в котором сейсмические косы 1 включают описанные выше связанные датчики давления и датчики, реагирующие на движение, может потребоваться работа с сейсмическими косами 1 на выбранной глубине в воде, превышающей ту, которая была бы достигнута в результате сложения сил, действующих на сейсмическую косу (например, плавучесть сейсмической косы, сила поперечной тяги со стороны параванов, буксирование, сопротивление воды, вес передних концевых устройств и буксировочных тросов-кабелей и т.д.). Поэтому в настоящем примере заглубитель 9 может быть подсоединен к каждой из крайних боковых сейсмических кос 1 в непосредственной близости от каждого переднего концевого устройства 15. Другие примеры могут включать заглубитель, подсоединенный непосредственно к переднему концевому устройству 15 на каждой сейсмической косе 1. Заглубитель 9 может быть простым грузом для обеспечения отрицательной (направленной вниз) силы плавучести, или может представлять собой устройство, которое создает гидродинамическую подъемную силу в нижнем направлении в результате движения в воде 11. Если заглубитель 9 представляет собой груз, например, свинец или другой груз из плотного материала, его внешняя форма может быть несущественной, хотя может оказаться предпочтительным обеспечить груз, форма которого выбрана для уменьшения силы трения при движении в воде 11. Гидродинамический заглубитель может включать, как предлагается на фиг. 1,комбинации выступов из корпуса заглубителя 9, создающих направленную вниз гидродинамическую подъемную силу. В некоторых примерах направлением и величиной гидродинамической подъемной силы можно управлять. Устройства, которые могут обеспечивать управляемую гидродинамическую подъемную силу, описаны, например, в патенте США 7457193, выданном Pramik и находящемся в совместном владении с настоящим изобретением. Другие примеры использованы в противопоставленных материалах, приведенных в разделе "Предшествующий уровень техники" настоящего документа. Цель использования заглубителя 9 состоит в том, чтобы отклонители 2, используемые для получения необходимого разведения в боковом направлении сейсмических кос, как правило, буксировались по или вблизи водной поверхности, и стремились подтягивать распределительные тросы сейсмических кос 8 вверх, когда нужная глубина буксирования сейсмической косы оказывается глубже, чем буксировочная точка распределительных тросов 8 на отклонителе 2. Такое расположение является типовым. Таким образом,применение заглубителя 9 в непосредственной близости от переднего концевого устройства 15, по меньшей мере, крайних боковых сейсмических кос 1 заставляет передний конец соответствующих сейсмических кос 1 смещаться в нижнем направлении в воде 11. В других примерах геофизические датчики могут относиться к типу, который не требует буксирования сейсмических кос 1 на больших глубинах, чем была бы достигнута в результате действия описанных выше сил на различные компоненты системы сбора данных, размещаемой в воде 11. В таких случаях заглубитель 9 можно исключить, при этом глубину в непосредственной близости от переднего конца каждой сейсмической косы 1 можно поддерживать с помощью устройств, работа которых объясняется выше. Сейсмические косы 1 могут включать (не показаны на фиг. 1 для ясности) ряд пространственно разнесенных в продольном направлении устройств управления боковым усилием и глубиной для поддержания глубины и бокового расположения в выбранных местах. Такие устройства описаны, например,в патенте США 6144342, выданном Bertheas и др. В настоящем изобретении каждая сейсмическая коса 1 может подсоединяться в непосредственной близости от переднего концевого устройства 15 к соответствующему плавучему устройству 3, которое движется по водной поверхности в непосредственной близости от переднего концевого устройства 15. Соединение может быть выполнено с помощью троса или каната 6, подсоединенного к сейсмической косе 1 в непосредственной близости от переднего концевого устройства 15 одним концом, а другим кон-3 021094 цом - к лебедке 10, находящейся на плавучем устройстве 3. Управление работой лебедки 10 может осуществляться записывающей системой 14 с помощью линии радиосвязи 12 или аналогичного устройства радиочастотного устройства связи. Другие примеры могут предусматривать автоматическую работу лебедки на плавучем устройстве 3, как объясняется ниже со ссылкой на фиг. 2. Каждое переднее концевое устройство 15 может включать связанный с ним датчик глубины 15 А (см. фиг. 2), такой как датчик давления, также соединенный каналом связи с записывающим устройством 14 или устройствами на модуле обеспечения плавучести, описанном ниже. Когда нужно поддерживать передние концевые устройства 15 на выбранной глубине в воде 11, записывающую систему 14 можно запрограммировать для управления работой лебедки 10 (или запрограммировать контроллер лебедки на плавучем устройстве 3, как объясняется со ссылкой на фиг. 2) в каждом плавучем устройстве 3 в ответ на сигналы от соответствующих датчиков давления (глубины) 15 А (фиг. 2). В других примерах датчик (не показан), который измеряет вращение лебедки 10, может использоваться в качестве индикатора глубины переднего конца сейсмической косы 1. Термин "датчик глубины", применяемый в настоящем документе, включает в себя два приведенных выше примера датчиков и любой другой чувствительный элемент, который формирует сигнал, соответствующий глубине в непосредственной близости от переднего конца сейсмической косы 1 в воде 11 или длине троса 6, разворачиваемого каждой лебедкой 10. Одно из устройств обеспечения плавучести 3, включающее лебедку 10, более подробно показано на фиг. 2. Плавучее устройство 3 может включать камеру 30 закрытого типа, заполненную несжимаемой жидкостью или пеной малой плотности или другим плавучим материалом для противостояния гидростатическому смятию и подачи силы плавучести к переднему концу сейсмической косы 1. Снаружи или внутри камеры 30, или в выбранной подкамере внутри нее могут располагаться следующие компоненты системы контроля глубины для переднего концевого устройства 15 сейсмической косы. Приемопередатчик 12 обеспечивает радиосвязь или другой способ обмена сигналами с записывающей системой (14 на фиг. 12). Сигналы с приемопередатчика 12 могут передаваться на центральный процессор 22, такой как микроконтроллер. Центральный процессор 22 может генерировать сигналы для управления электродвигателем 24. Электродвигатель 24 может включать соответствующие компоненты на выходном валу для вращения лебедки 10 с целью вытягивания и втягивания троса 6, который соединяет переднее концевое устройство 15 с плавучим устройством 3. В состав лебедки 10 может входить контактное кольцо 26, позволяющее передавать электрические и (или) оптические сигналы от датчика давления (глубины) 15 А на центральный процессор 22 и, в конечном счете (с помощью радиопередатчика 12), на записывающий модуль (14 на фиг. 1). В других примерах сигналы от датчика глубины 15 А можно передавать по буксировочному тросу-кабелю 6 на записывающую систему (14 на фиг. 1). Электропитание для работы перечисленных выше компонентов может сохраняться или обеспечиваться аккумуляторной батареей 28. Для восполнения батарейного электропитания и (или) зарядки аккумуляторной батареи 28, плавучее устройство 3 может включать электрогенератор 32, который вращается пропеллером или турбиной 34 в ответ на движение плавучего устройства 3 в воде в ходе работы. Заглубитель 9 показан на фиг. 2, чтобы проиллюстрировать его относительное расположение по отношению к плавучему устройству 3. Заглубителем, пример которого показан на фиг. 2, может быть одно из объяснявшихся выше устройств, которое формирует управляемую направленную вниз гидродинамическую подъемную силу при движении заглубителя 9 в воде 11. Как объясняется выше со ссылкой на фиг. 1, сигналы от датчика глубины 15 А могут передаваться на записывающую систему (14 на фиг. 1),которая повторно передает сигнал на контроллер 22, чтобы управлять лебедкой 10 для поддержания выбранной глубиной в воде. Альтернативно, глубину можно запрограммировать в контроллере 22, при этом глубина может поддерживаться автоматически. Изменения поддерживаемой глубины могут передаваться на контроллер 22 из записывающей системы 14 по мере необходимости. Система в соответствии с настоящим изобретением позволяет обеспечить более точную геометрию расстановки группы датчиков,чем возможно при использовании устройств управления геометрией расстановки, относящихся к известному уровню техники. Система настоящего изобретения обладает также возможностью изменения глубины переднего конца геофизических сейсмических кос в ходе работы, когда необходимо обеспечить соответствие изменившимся условиям съемки. Система сейсмических кос в соответствии с различными аспектами настоящего изобретения может обеспечить проведение геофизической разведки с большей точностью благодаря поддерживанию передних концов сейсмических кос на выбранной глубине в воде. Хотя настоящее изобретение описано с использованием ограниченного числа вариантов осуществления, специалисты, воспользовавшись раскрытым здесь изобретением, смогут вывести из настоящего описания другие варианты осуществления, не отступающие от объема раскрытого здесь изобретения. Соответственно, объем настоящего изобретения ограничивается только прилагаемой формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Система для буксирования морской геофизической сейсмоприемной косы, содержащая ряд буксировочных тросов, проходящих от буксирующего судна; и для каждого буксировочного троса переднее концевое устройство сейсмоприемной косы, подсоединенное к заднему концу буксировочного троса; сейсмоприемную косу, подсоединенную передним концом к переднему концевому устройству, при этом сейсмоприемная коса содержит ряд геофизических датчиков, размещенных с пространственным разнесением по длине сейсмоприемной косы; плавучее устройство, подсоединенное отходящим от него тросом к сейсмоприемной косе вблизи ее переднего конца; лебедку, расположенную на плавучем устройстве, для вытягивания и втягивания троса; датчик глубины, расположенный вблизи переднего конца сейсмоприемной косы; контроллер для обмена сигналами с лебедкой и датчиком глубины, выполненный с возможностью управления лебедкой таким образом, чтобы поддерживать передний конец сейсмоприемной косы на выбранной глубине в водоеме; и заглубитель, подсоединенный к одной из крайних боковых сейсмоприемных кос вблизи ее переднего конца. 2. Система по п.1, отличающаяся тем, что датчик глубины содержит датчик давления. 3. Система по п.1, отличающаяся тем, что содержит связанные с каждым плавучим устройством аккумуляторную батарею, подсоединенную к лебедке и к контроллеру для обеспечения их электропитания,и электрогенератор, подсоединенный к аккумуляторной батарее, причем привод электрогенератора обеспечивается движением плавучего устройства в водоеме. 4. Система по п.1, отличающаяся тем, что содержит радиочастотный приемопередатчик, размещенный на каждом плавучем устройстве и на буксирующем судне для передачи сигналов, относящиеся к выбранной глубине в водоеме. 5. Система по п.1, отличающаяся тем, что заглубители прилагают направленное вниз усилие к переднему концу сейсмоприемной косы, с которой они соединены, в водоеме. 6. Система по п.1, отличающаяся тем, что геофизические датчики представляют собой электроды,магнитометры или датчики температуры или представляют собой существенно связанные сейсмические датчики движения частиц и датчики временного градиента давления. 7. Система по п.1, отличающаяся тем, что каждый датчик глубины измеряет вращение лебедки. 8. Способ буксирования сейсмоприемных кос в водоеме с использованием системы по пп.1-7,включающий следующие шаги: протягивают ряд буксировочных тросов с буксирующего судна, движущегося в водоеме, к соответствующим передним концевым устройствам, пространственно разнесенным в поперечном направлении,причем передние концевые устройства подсоединены к передним концам расположенных в водоеме соответствующих сейсмоприемных кос, при этом каждая сейсмоприемная коса содержит ряд геофизических датчиков, размещенных с пространственным разнесением по длине сейсмоприемной косы; подвешивают каждую сейсмоприемную косу в точке подвеса, находящейся вблизи ее переднего конца, на плавучем устройстве рядом с поверхностью водоема; регулируют длину троса между каждой точкой подвеса и каждым плавучим устройством таким образом, чтобы поддерживать каждую точку подвеса на выбранной глубине в водоеме; и прикладывают посредством заглубителя направленную вниз силу вблизи точки подвеса одной из крайних боковых сейсмоприемных кос. 9. Способ по п.8, отличающийся тем, что глубину в воде переднего конца сейсмоприемной косы определяют путем измерения давления в воде. 10. Способ по п.8, отличающийся тем, что приложение направленной вниз силы предусматривает крепление груза вблизи точек подвеса крайних боковых сейсмоприемных кос. 11. Способ по п.8, отличающийся тем, что приложение направленной вниз силы предусматривает создание гидродинамической подъемной силы вблизи точек подвеса крайних боковых сейсмоприемных кос. 12. Способ по п.8, отличающийся тем, что геофизические датчики представляют собой электроды,магнитометры или датчики температуры или представляют собой существенно связанные сейсмические датчики движения частиц и датчики временного градиента давления. 13. Способ по п.8, отличающийся тем, что дополнительно определяют глубину в водоеме переднего конца сейсмоприемной косы путем измерения вращения лебедки, расположенной на плавучем устройстве, с которого подвешена сейсмоприемная коса, причем посредством вращения регулируют длину троса.
МПК / Метки
МПК: G01V 1/38
Метки: буксирования, сейсмоприемной, система, способ, косы
Код ссылки
<a href="https://eas.patents.su/7-21094-sistema-i-sposob-buksirovaniya-sejjsmopriemnojj-kosy.html" rel="bookmark" title="База патентов Евразийского Союза">Система и способ буксирования сейсмоприемной косы</a>
Устройство для спуска и подъема сейсмоприемной косы для использования на суднах сейсмической разведки
Номер патента: 2251
Опубликовано: 28.02.2002
Автор: Вилльямсон Марк Ричард
МПК: B63B 35/00
Метки: подъема, сейсмоприемной, суднах, устройство, использования, сейсмической, косы, разведки, спуска
Формула / Реферат:
1. Устройство для спуска и подъема сейсмоприемной косы для использования на судне сейсмической разведки, содержащее, балку, средство для закрепления балки в продольном направлении судна выше нормальной габаритной высоты над палубой для сейсмоприемных кос судна, содержащее шарнирное соединение с самым кормовым концом балки, обеспечивающее возможность поворота конца вокруг горизонтальной осевой линии, проходящей поперек балки, и удлиняемое опорное...
Способ очистки данных морской сейсмоприемной косы с нерегулярным расположением приемников от ложных отражений
Номер патента: 17293
Опубликовано: 30.11.2012
Авторы: Ван Ден Берг Петер М., Ван Борселен Роальд Дж., Фоккема Якоб Т.
МПК: G01V 1/36
Метки: ложных, расположением, нерегулярным, косы, морской, способ, приемников, сейсмоприемной, очистки, данных, отражений
Формула / Реферат:
1. Способ подавления волн-спутников в сейсмических данных, записанных с помощью морских сейсмоприемных кос с нерегулярным расположением приемников, включающийполучение посредством преобразования в спектральную область сейсмических данных для каждого возбуждения сейсмического источника и для каждой частоты;итерационную обработку преобразованных сейсмических данных по схеме с сопряженными градиентами, использующей физически обоснованный...
Прогнозирование формы сейсмоприемной косы с помощью нейронной сети
Номер патента: 4907
Опубликовано: 26.08.2004
Автор: Найлэнд Дэвид Ли
МПК: G01V 1/38
Метки: сейсмоприемной, косы, прогнозирование, нейронной, формы, помощью, сети
Формула / Реферат:
1. Система для прогнозирования формы сейсморазведочного кабеля, содержащая нейронную сеть, включающую входной уровень, скрытый уровень и выходной уровень, при этом каждый уровень содержит один или несколько узлов, узлы во входном уровне связаны с рабочими данными, по меньшей мере один узел во входном уровне соединен по меньшей мере с одним узлом в скрытом уровне, а по меньшей мере один узел в скрытом уровне соединен по меньшей мере с одним узлом...
Способ и система для преобразования трехмерных данных буксируемой сейсмической косы с двумя типами датчиков в данные с подавленным шумом
Номер патента: 14279
Опубликовано: 29.10.2010
Автор: Клювер Тилман
Метки: трехмерных, преобразования, косы, подавленным, данных, сейсмической, система, датчиков, способ, буксируемой, шумом, типами, данные, двумя
Формула / Реферат:
1. Способ преобразования трехмерных данных буксируемой сейсмической косы с двумя типами датчиков в данные с подавленным шумом, в которомпреобразуют трехмерные данные буксируемой сейсмической косы с двумя типами датчиков, представляющие подземные образования и полученные группой установленных вблизи поверхности земли сейсмических датчиков, в масштабированные сейсмические данные с подавленным шумом от наложения частот;преобразуют записи давления и...
Устройство для манипулирования сейсмоприемной косой для использования на судах сейсмической разведки
Номер патента: 2559
Опубликовано: 27.06.2002
Авторы: Хойкас Карел Виллем Ян, Йонсен Борд
МПК: H02G 1/10, B63B 21/66, G01V 1/38...
Метки: разведки, сейсмической, устройство, судах, использования, косой, сейсмоприемной, манипулирования
Формула / Реферат:
1. Устройство для манипулирования сейсмоприемной косой для использования на судне сейсмической разведки, содержащее направляющее средство, выполненное с возможностью установки на палубе для развертывания сейсмоприемных кос судна вблизи кормового конца палубы для развертывания сейсмоприемных кос таким образом, чтобы оно проходило в поперечном направлении, по меньшей мере, по части ширины палубы для развертывания сейсмоприемных кос, и тележку,...
Предыдущий патент: Устройство и способ акустического фокусирования частиц
Следующий патент: Способ получения инактивированной цельновирионной гидроокисьалюминиевой вакцины против гриппа а/h1n1
Случайный патент: Способ получения чистых галогенидных солей щелочного и/или щелочно-земельного металла в результате гидролитической обработки галогенидных органических отходов