Автоматизированный комплекс для видеонаблюдения
Номер патента: 14620
Опубликовано: 30.12.2010
Авторы: Дрозд Григорий Геннадьевич, Караханян Гайк Сейранович
Формула / Реферат
1. Автоматизированный комплекс для видеонаблюдения, содержащий летательный аппарат, системы управления полетом и аэрофото-видеосъемкой с фото-видеокамерой/телекамерой, отличающийся тем, что летательный аппарат содержит аэростат с гондолой, система управления полетом снабжена наземным пультом управления летательным аппаратом, при этом гондола оснащена по меньшей мере двумя двигателями вертикальной тяги и двумя маршевыми двигателями горизонтальной тяги, последние смонтированы с возможностью создания дополнительной вертикальной тяги и содержат систему управления плавучестью для изменения высоты подъема аэростата, а так же устройство аварийного спуска и устройство телеметрии; система аэрофото-видеосъемки содержит устройство приема-передачи видеосигнала и устройство управления видео-фотокамерой/телекамерой и смонтирована на подвесной платформе, стабилизированной посредством трех гироскопов.
2. Автоматизированный комплекс по п.1, отличающийся тем, что подвесная платформа выполнена с возможностью независимого перемещения фото-видеокамеры/телекамеры по трем взаимно перпендикулярным осям х, у, z с углом поворота по горизонтали на 360° и углом поворота по оси у на 60°, оси z на 90°.
3. Автоматизированный комплекс по п.1, отличающийся тем, что устройство управления фото-видеокамерой/телекамерой выполнено в виде дистанционного радиоуправляемого пульта в виде 4-12-канального передатчика.
4. Автоматизированный комплекс по п.1, отличающийся тем, что двигатели вертикальной и горизонтальной тяги выполнены реверсивными, а маршевые двигатели горизонтальной тяги закреплены с возможностью поворота на оси крепления.
5. Автоматизированный комплекс по п.1, отличающийся тем, что летательный аппарат выполнен с возможностью движения по горизонтали вперед и назад, по вертикали - вниз и вверх, а также может выполнять разворот на месте и зависать над объектом съемки.

Текст
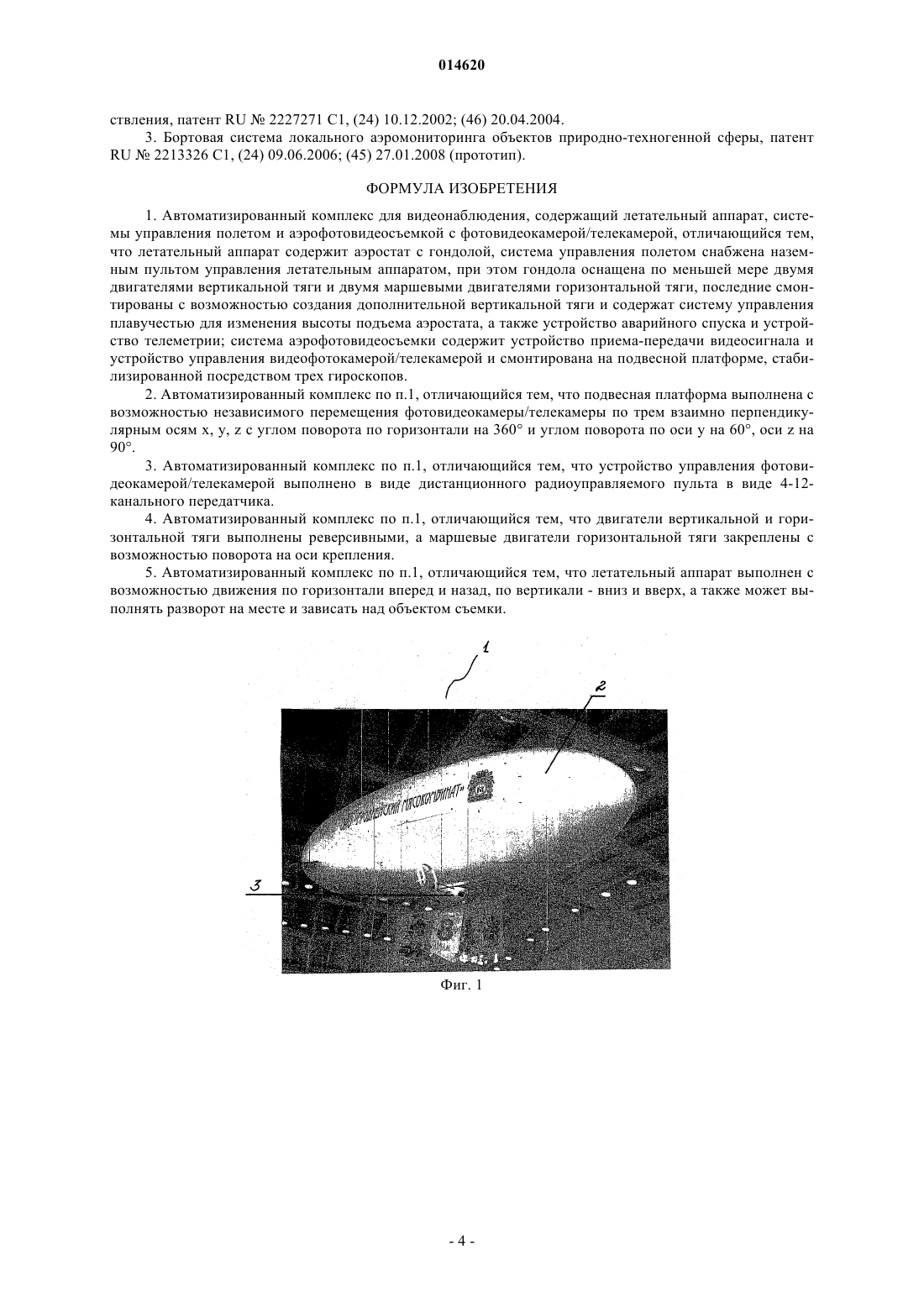
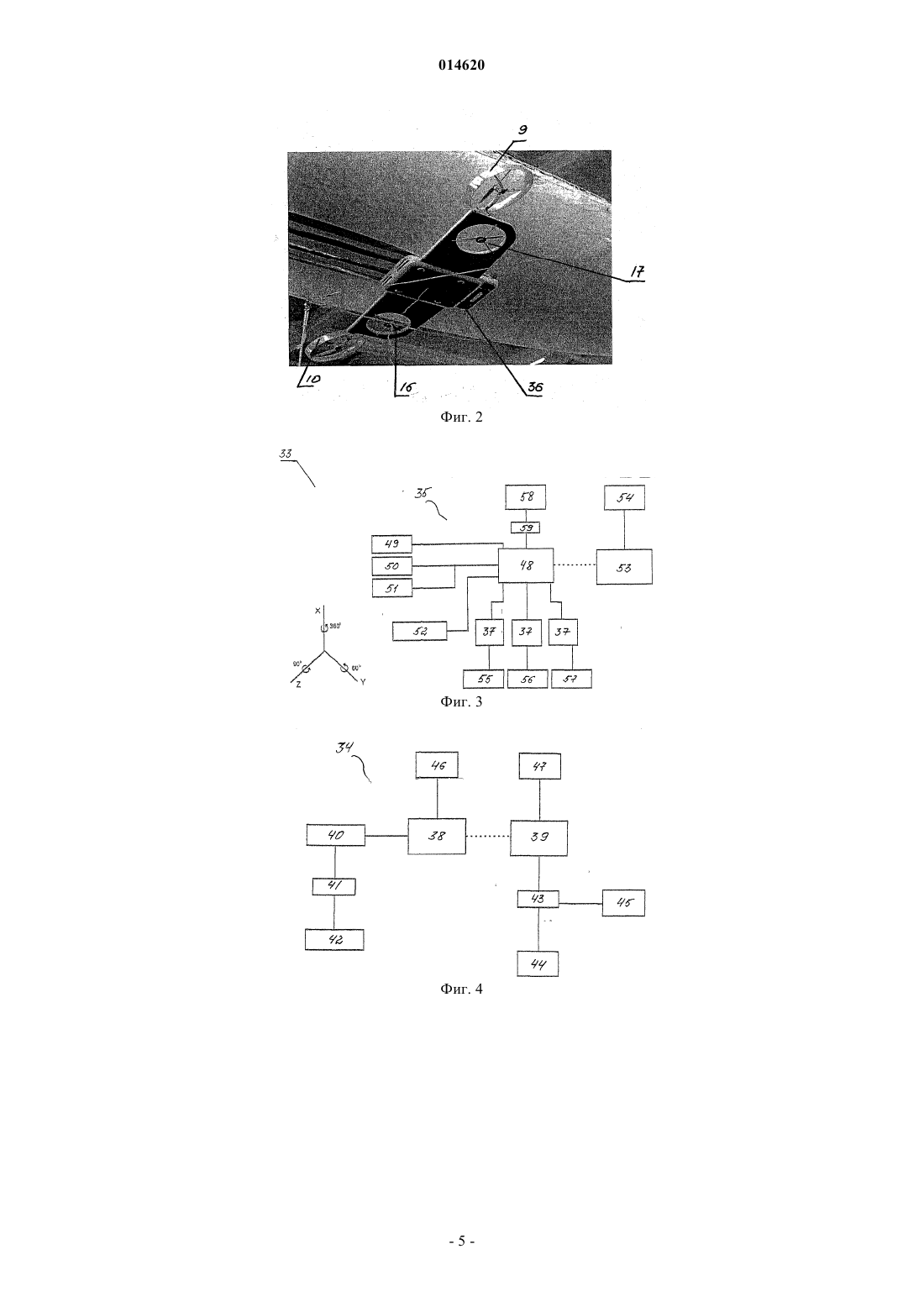
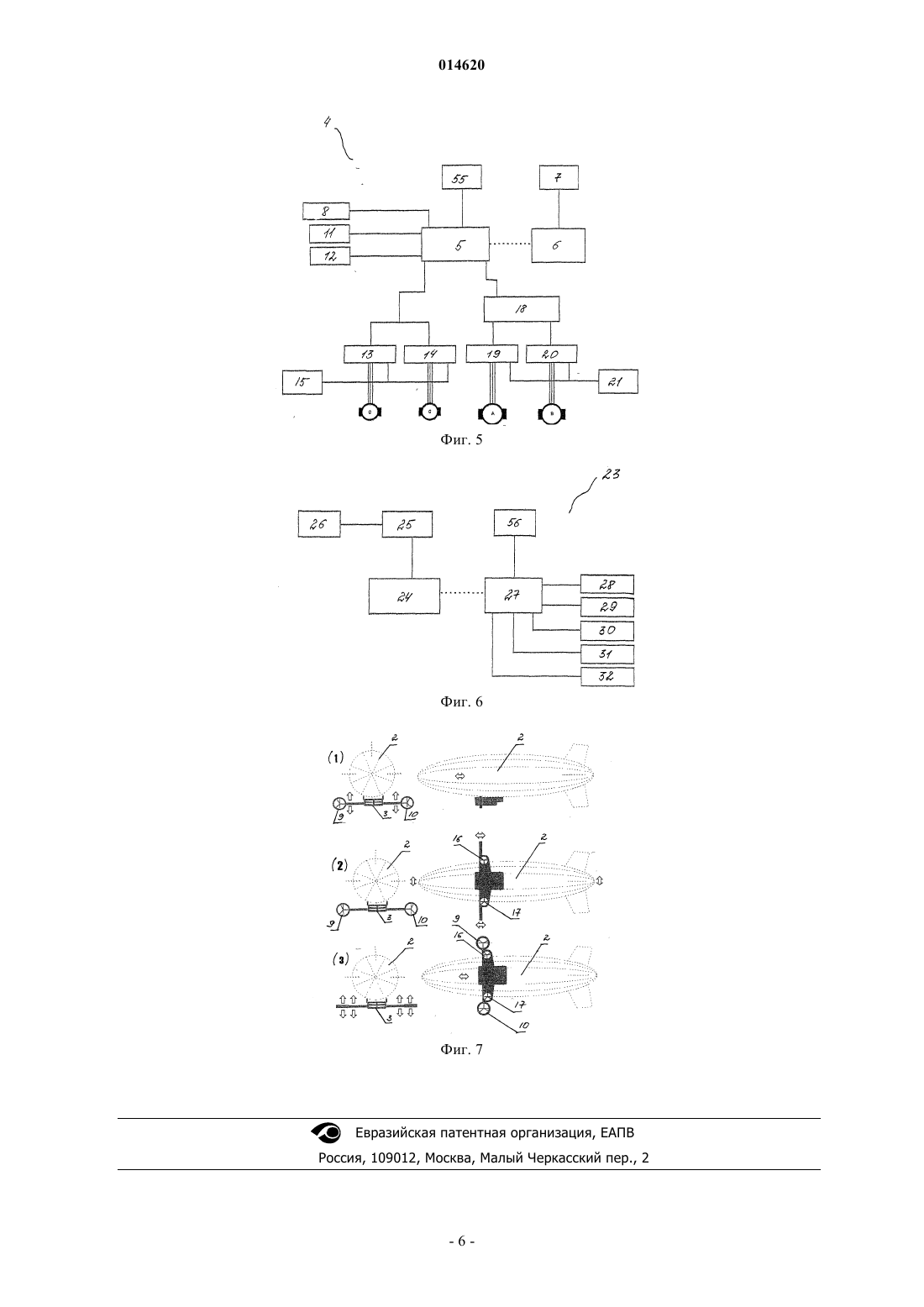
(71)(72)(73) Заявитель, изобретатель и патентовладелец: ДРОЗД ГРИГОРИЙ ГЕННАДЬЕВИЧ; КАРАХАНЯН ГАЙК СЕЙРАНОВИЧ (BY) Изобретение относится к способу проведения аэрофотовидеосъемки, а именно для топографической съемки местности, создания планов и карт, производства кино- и видеофильмов и репортажей, проектирования, геологоразведки, а также организации наблюдения и записи в режиме онлайн за массовыми мероприятиями. Технический результат: беспилотный дистанционный режим управления аэростатом как на открытой местности, так и в больших закрытых помещениях (стадионах, спортивных залах и т.п. объектах) для осуществления аэрофотовидеосъемки. Автоматизированный комплекс 1 отличается тем, что летательный аппарат содержит аэростат 2 с гондолой 3 и систему управления полетом с наземным пультом управления летательным аппаратом. Гондола 3 аэростата 2 оснащена по меньшей мере двумя двигателями вертикальной тяги 16, 17 и двумя маршевыми двигателями 9, 10 горизонтальной тяги, последние смонтированы с возможностью создания дополнительной вертикальной тяги. Гондола 3 содержат систему управления плавучестью с баланетом 52 для изменения высоты подъема аэростата 2 и устройство телеметрии 23. Система аэрофотовидеосъемки 33 содержит устройство приема-передачи видеосигнала 34 и устройство управления 35 камерой 43 и смонтирована на подвесной платформе 36, стабилизированной посредством трех гироскопов 37. 014620 Область техники Изобретение относится к способу проведения аэрофотовидеосъемки, а именно для топографической съемки местности, создания планов и карт, производства кино- и видеофильмов и репортажей, проектирования, геологоразведки, а также организации наблюдения и записи в режиме он-лайн за массовыми мероприятиями. Предшествующий уровень техники Известен способ проведения маршрутной аэросъемки [1]. Аэросъемку проводят с борта летательного аппарата - ракетоплана, запускаемого по маршруту съемки по баллистической траектории со стартовым углом наклона к горизонтали от 40 до 89, который в верхней точке баллистической траектории увеличением аэродинамического качества переводят в планирующий полет по маршруту съемки, при снижении ЛА на 20-60% от достигнутой максимальной высоты подъема его разворачивают на обратный курс и возвращают в зону запуска. Недостатком известного способа является неэффективность проведения локального аэромониторинга объектов. Известен способ локального аэромониторинга геотехнических систем [2]. Способ включает съемку с выдерживанием трассы полета на высоте до 500 м с помощью курсовой камеры и навигационных данных, координатную привязку снимков с возможностью последующего их селективного вызова. При этом курсовую камеру и съемочную камеру - TV камеру высокого разрешения - устанавливают по продольной оси летательного аппарата, причем съемочную камеру с возможностью вращения в горизонтальной плоскости и направляют перпендикулярно линии съемочного галса, а курсовую камеру - с возможностью вращения в горизонтальной и вертикальной плоскостях и направляют на опознавательный знак в конце линии съемочного галса, при этом в штатном режиме съемки камеры устанавливают так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса, а при режиме ветрового воздействия съемочный галс выдерживают путем поворота камер на угол компенсации и в интерактивном режиме отслеживают по положению отображаемого на бортовых видеомониторах опознавательного знака и по навигационным данным, получение которых синхронизируют с проведением радиометрической и геометрической коррекции с последующим сжатием, сохранением и регистрацией покадровой видеоинформации в геоинформационной базе данных. Синхронизацию радиометрической и геометрической коррекции, сжатие и сохранение покадровой видеоинформации в геоинформационной базе данных с получением навигационных данных осуществляют по бортовому генератору времени. Бортовой генератор времени до начала аэромониторинга калибруют по атомным часам через Интернет. Геоинформационную базу данных организуют путем интеграции покадровой видеоинформации с координатно-временной привязкой по линии съемочного галса. Покадровую съемку осуществляют с интервалом времени, требуемым для продольного перекрытия смежных кадров линии съемочного галса. Выдерживание съемочного галса в интерактивном режиме осуществляют путем отображения текущей видеоинформации от съемочной и курсовой камер на видеомониторах блоков управления полетом и аэровизуального наблюдения. Съемочный галс при режиме ветрового воздействия корректируют на основе информации геоинформационной базы данных. К недостатку этого способа следует отнести сложность процесса съемки и управления полетом при локальной аэрофотосъемке объектов. Наиболее близка к предлагаемому изобретению бортовая система локального аэромониторинга объектов природно-техногенной сферы [3]. Система включает связанные с бортовым компьютером блок управления полетом по плану местности и по навигационным данным GPS-приемника, а также оптический блок на базе аэросъемочной и курсовой камер высокого разрешения. Оптический блок оснащен цифровыми камерами с возможностью вращения одной из камер в плоскости оптических осей камер и установлен на траверсе, выполненной в виде модульной конструкции, каждый модуль которой снабжен приводом вращения в ортогональной плоскости, причем оптический блок установлен на модуле с возможностью вращения в вертикальной плоскости с помощью привода с изменяемой полярностью, а модуль с приводом вращения в горизонтальной плоскости установлен на опорно-поворотном в вертикальной плоскости кронштейне, снабженном механизмом стопорения в заданном положении, кроме того,система дополнительно содержит дистанционный командный прибор, связанный с траверсой и всеми блоками, а также синхронизатор таймеров камер оптического блока и GPS-приемника. Курсовая камера установлена в оптическом блоке с возможностью вращения в плоскости оптических осей камер. Курсовой камерой является TV-камера. Бортовая система снабжена гироскопическим нивелиром, который связан с командным прибором. Опорно-поворотный кронштейн установлен с возможностью контроля установки угла поворота, а соосно с опорно-поворотным кронштейном неподвижно установлена угломерная панель. В командном приборе установлено управляемое концевыми выключателями реле, изменяющее полярность привода. Упоры концевых выключателей регулируемые. В командном приборе установлен таймер, соединенный с приводом с изменяемой полярностью и тумблер для фотосъемки с одиночной экспозицией. Таймеры камер оптического блока и GPS-приемника откалиброваны по атомным часам сервера точного времени. Недостатком известной бортовой системы является сложность ее выполнения, а также невозмож-1 014620 ность ее использования в закрытых помещениях. Целью изобретения является устранение указанных недостатков и создание автоматизированного комплекса для аэрофотовидеосъемки с возможностью проведения съемки как в открытом пространстве,так и в закрытых помещениях. Техническим результатом изобретения является осуществление аэрофотовидеосъемки в беспилотном режиме с дистанционным управлением аэростатом на открытой местности, а также в больших закрытых помещениях - стадионах, спортивных залах и т.п. объектах и повышение безопасности полетов. Раскрытие изобретения Технический результат достигается тем, что в автоматизированном комплексе для видеонаблюдения, содержащим летательный аппарат, системы управления полетом и аэрофотовидеосъемкой с фотовидеокамерой/телекамерой, согласно изобретению, летательный аппарат содержит аэростат с гондолой,система управления полетом снабжена наземным пультом управления летательным аппаратом, при этом гондола оснащена по меньшей мере двумя двигателями вертикальной тяги и двумя маршевыми двигателями горизонтальной тяги, последние смонтированы с возможностью создания дополнительной вертикальной тяги и содержат систему управления плавучестью для изменения высоты подъема аэростата, а также устройство аварийного спуска и устройство телеметрии; система аэрофотовидеосъемки содержит устройство приема-передачи видеосигнала и устройство управления видеофотокамерой/телекамерой и смонтирована на подвесной платформе, стабилизированной посредством трех гироскопов. Подвесная платформа выполнена с возможностью независимого перемещения фотовидеокамеры/телекамеры по трем взаимно перпендикулярным осям х, у, z с углом поворота по горизонтали на 360 и углом поворота по оси у на 60, оси z на 90. Устройство управления фотовидеокамерой/телекамерой выполнено в виде дистанционного радиоуправляемого пульта в виде 4-12-канального передатчика. Двигатели вертикальной и горизонтальной тяги выполнены реверсивными, а маршевые двигатели горизонтальной тяги закреплены с возможностью поворота на оси крепления. Летательный аппарат выполнен с возможностью движения по горизонтали вперед и назад, по вертикали - вниз и вверх, а также произведения разворота на месте и зависания над объектом съемки. Краткое описание чертежей На фиг. 1 представлен общий вид комплекса видеонаблюдения с аэростатом, оборудованным гондолой; на фиг. 2 - схема подвеса к аэростату двигателей вертикальной и горизонтальной тяги; на фиг. 3 - принципиальная схема управления фотовидеокамерой/телекамерой; на фиг. 4 - принципиальная схема приема-передачи видеосигнала; на фиг. 5 - принципиальная схема управления гондолой; на фиг. 6 - принципиальная схема телеметрического контроля полета аэростата; на фиг. 7 - принципиальная схема управления полетом аэростата. Лучший вариант реализации изобретения Автоматизированный комплекс 1 содержит аэростат 2 с прикрепленной гондолой 3, систему управления 4 гондолой 3, включающую приемник команд 5, функционально связанный с передающим устройством 6, снабженный источниками питания 6 и 7 соответственно; приемник команд 5 функционально связан с сервисным механизмом 8 угла наклона маршевых двигателей горизонтальной тяги 9 и 10, датчиком ускорения 11, ультразвуковым датчиком препятствий 12, регуляторами оборотов вертикальной тяги 13, 14 двигателей вертикальной тяги 16, 17 с источником питания 15 для регуляторов оборотов 13,14; устройство дополнительного подрулирования 18, связанное с регуляторами оборотов 19, 20 маршевых двигателей 9, 10 с источником питания 21 для регуляторов оборотов 19, 20. Маршевые двигатели 9,10 смонтированы на платформе 22 с возможностью поворота на оси крепления и создания дополнительной вертикальной тяги и содержат устройство подрулирования 18 с регуляторами оборотов 19, 20 маршевых двигателей 9, 10 с возможностью изменения высоты подъема аэростата 2. Гондола 3 (фиг. 6) содержит устройство аварийного спуска (на чертеже не показано), систему управления плавучестью с баланетом 52 и устройство телеметрии 23, включающее приемник команд 24 с индикатором 25 и источником питания 26, передатчик 27, функционально связанный с приемником команд 24 и датчиками высоты 28, скорости 29, напряжения 30, температуры окружающей среды 31 и датчиком GPS 32. Система аэрофотовидеосъемки 33 смонтирована на подвесной платформе 36 гондолы 3 и включает устройство приема-передачи видеосигнала 34, устройство управления 35 фотовидеокамерой/телекамерой 43 (далее камера 43), которая стабилизирована тремя гироскопами 37 и включает приемник команд 48,функционально связанный с наземным дистанционным радиоуправляемым пультом 53 в виде 4-12 канального передатчика с собственным источником питания 54; источник питания 58 со стабилизатором 59 приемника команд 48, который связан с сервомеханизмами 49 (ZOOM), 50 (для включения тепловизора) и 51 (для включения камеры 43) и систему управления баланетом 52. Устройство приема-передачи видеосигнала 34 содержит приемник сигнала 38 с источником питания 46, функционально связанный с передающим устройством 39 со своим источником питания 47. Приемник сигнала 38 связан с преобразователем видеосигнала 40, который соединен с монитором 41, по-2 014620 следний связан с записывающим устройством 42. Передающее устройство 39 функционально связано с камерой 43, содержащей свой источник питания 45, и цифровым устройством записи 44. Промышленная применимость Автоматизированный комплекс 1 автотранспортом или иным средством доставляют в район организации аэрофотовидиосъемки. Далее оболочку аэростата 2, предварительно закрепленную посредством привязного троса для предотвращения неуправляемого взлета (на чертеже не показано), наполняют газом(гелием), к оболочке подвешивают гондолу 3 с маршевыми двигателями 9, 10 горизонтальной тяги и двигателями вертикальной тяги 16, 17. В гондоле 3 предварительно размещают систему управления 4 с приемником команд 5, передающим устройством 6 с источниками питания 6 и 7. На подвесной платформе 36 к гондоле 3 крепят систему аэрофотовидеосъемки 33 и приводят в рабочую готовность все системы и устройства автоматизированного комплекса 1. Затем посредством системы 4 управления гондолой 3 через передающее устройство 6 подают необходимые команды на приемник команд 5, осуществляют запуск двигателей вертикальной тяги 16, 17, маршевых двигателей 9, 10, освобождают гондолу 3 от привязного троса и, управляя посредством сервомеханизма 8 углом наклона маршевых двигателей 9, 10 и регуляторами оборотов 13, 14, 19, 20 двигателей вертикальной тяги 16, 17 и маршевых двигателей 9, 10,в беспилотном режиме направляют автоматизированный комплекс 1 непосредственно в район проведения видеонаблюдения. Посредством систем (24, 27) устройства телеметрии 23 производят постоянный контроль высоты полета (датчик 28), скорости ветра (датчик 29), температуры воздуха (датчик 30), координат (датчик GPS 32) и с учетом показаний датчика ускорения 11 и ультразвукового датчика препятствий 12 обеспечивают оптимальное управление аэростатом 2 путем непрерывного контроля и коррекции работы двигателей вертикальной тяги 16, 17, маршевых двигателей 9, 10 гондолы 3. При этом аэростат 2(фиг. 7, поз. 1, 2, 3) ориентируют над объектом наблюдения, осуществляя необходимые маневры: движение по горизонтали - вперед-назад, движение по вертикали - вверх-вниз, разворот на месте или зависание на заданной высоте. Указанные маневры осуществляют путем реверса двигателей вертикальной тяги 16,17, маршевых двигателей 9, 10 и создания дополнительной вертикальной тяги за счет устройства дополнительного подруливания 18 маршевых двигателей 9, 10. Управления плавучестью для изменения высоты подъема аэростата или в случае аварийного спуска осуществляют дополнительно системой управления баланетом 52, что позволяет устанавливать разный объем газа в оболочке аэростата 2. После завершения ориентации комплекса 1 над объектом видеонаблюдения с наземного дистанционного радиоуправляемого пульта 53 с программным управлением в приемник команд 48 подают управляющие сигналы на устройства управления 35 камерой 43. Камеру 43 после наведения на объект наблюдения стабилизируют гироскопами по осям X, У, Z и удерживают в заданном направлении сервомеханизмами 55, 56,57. По оси X сервомеханизмом 55 обеспечивают поворот камеры 43 на 360, а сервомеханизмами 56 и 57 соответственно по осям Y и Z на 60 и 90, удерживая тем самым объект съемки в фокусе камеры 43 и осуществляя видеонаблюдение в соответствии с поставленной задачей. Автоматизированный комплекс 1 в предложенном исполнении работает в беспилотном режиме и хорошо показал себя при проведении работ для различных целей: топографической съемки местности и создания планов и карт; в проектировании и строительстве для изучения природных и техногенных условий территории, эффективного планирования земельных участков, разработки предпроектной, градостроительной и рабочей документации в строительстве, создании государственных кадастров и информационных систем поселений; в сельском и лесном хозяйстве для разработки, планирования и мониторинга сельскохозяйственных и лесных угодий; в археологии и геологоразведке для проведения разведывательных работ; в производстве кинофильмов, видиоклипов, ТВ-программ и репортажей - для создания панорамных сцен, объемных сюжетов, передачи динамики спортивных соревнований и масштабных праздничных мероприятий; в производстве компьютерных игр как основа для создания 3D-моделей и анимации; в рекламной деятельности - для создания эффектной панорамной съемки пейзажей, фотографий зданий, других объектов и достопримечательностей в лучших ракурсах и последующего их размещения на календарях, в буклетах, туристических каталогах, создание рекламных видеороликов и фильмов,мультимедиа-презентаций с использованием панорамных сюжетов; в сфере торговли недвижимостью - получение фотографий объектов (зданий, земельных участков и т.д.) для оперативной или удаленной работы с покупателями; в сфере обеспечения безопасности - для организации видеонаблюдения массовых мероприятий и объектов охраны, видеоконтроля над авто- и железнодорожными трассами, мониторинга лесных массивов с целью обнаружения очагов пожаров. Беспилотное пилотирование аэростата с автоматизированным комплексом видеонаблюдения существенно облегчает выполнение полетов, т.к. исключает многочисленные согласования, связанные с получением разрешения на пилотирование таких воздушных судов и повышает безопасность полетов. Источники информации 1. Способ проведения маршрутной аэросъемки, патент RU2213326 С 1, (24) 20.03.2002; (45) 27.09.2003. 2. Способ локального аэромониторинга геотехнических систем и бортовой комплекс для его осуще-3 014620 ствления, патент RU2227271 С 1, (24) 10.12.2002; (46) 20.04.2004. 3. Бортовая система локального аэромониторинга объектов природно-техногенной сферы, патентRU2213326 С 1, (24) 09.06.2006; (45) 27.01.2008 (прототип). ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Автоматизированный комплекс для видеонаблюдения, содержащий летательный аппарат, системы управления полетом и аэрофотовидеосъемкой с фотовидеокамерой/телекамерой, отличающийся тем,что летательный аппарат содержит аэростат с гондолой, система управления полетом снабжена наземным пультом управления летательным аппаратом, при этом гондола оснащена по меньшей мере двумя двигателями вертикальной тяги и двумя маршевыми двигателями горизонтальной тяги, последние смонтированы с возможностью создания дополнительной вертикальной тяги и содержат систему управления плавучестью для изменения высоты подъема аэростата, а также устройство аварийного спуска и устройство телеметрии; система аэрофотовидеосъемки содержит устройство приема-передачи видеосигнала и устройство управления видеофотокамерой/телекамерой и смонтирована на подвесной платформе, стабилизированной посредством трех гироскопов. 2. Автоматизированный комплекс по п.1, отличающийся тем, что подвесная платформа выполнена с возможностью независимого перемещения фотовидеокамеры/телекамеры по трем взаимно перпендикулярным осям х, у, z с углом поворота по горизонтали на 360 и углом поворота по оси у на 60, оси z на 90. 3. Автоматизированный комплекс по п.1, отличающийся тем, что устройство управления фотовидеокамерой/телекамерой выполнено в виде дистанционного радиоуправляемого пульта в виде 4-12 канального передатчика. 4. Автоматизированный комплекс по п.1, отличающийся тем, что двигатели вертикальной и горизонтальной тяги выполнены реверсивными, а маршевые двигатели горизонтальной тяги закреплены с возможностью поворота на оси крепления. 5. Автоматизированный комплекс по п.1, отличающийся тем, что летательный аппарат выполнен с возможностью движения по горизонтали вперед и назад, по вертикали - вниз и вверх, а также может выполнять разворот на месте и зависать над объектом съемки.
МПК / Метки
МПК: B64B 1/00, G01C 11/02
Метки: комплекс, видеонаблюдения, автоматизированный
Код ссылки
<a href="https://eas.patents.su/7-14620-avtomatizirovannyjj-kompleks-dlya-videonablyudeniya.html" rel="bookmark" title="База патентов Евразийского Союза">Автоматизированный комплекс для видеонаблюдения</a>
Авиационный оптический комплекс высокого пространственного и спектрального разрешения с автоматическим адаптивным управлением
Номер патента: 13800
Опубликовано: 30.06.2010
Авторы: Беляев Борис Илларионович, Хвалей Сергей Владимирович, Катковский Леонид Владимирович
МПК: G01C 11/00, G03B 37/00
Метки: автоматическим, разрешения, оптический, управлением, комплекс, авиационный, пространственного, адаптивным, высокого, спектрального
Формула / Реферат:
1. Авиационный оптический комплекс, состоящий из блока оптических датчиков, содержащего многоканальный модуль спектрозональной съемки и спектрорадиометр с приемником излучения, и связанного с ним блока управления, включающего, по меньшей мере, блок питания и коммутации, центральный процессор, накопители данных, систему контроллеров, включая контроллер управления платой захвата изображения, и интерфейс оператора, причем каждый канал...
Автоматизированный способ диагностики (варианты)
Номер патента: 1835
Опубликовано: 27.08.2001
Автор: Айлифф Эдвин С
МПК: G06F 19/00
Метки: диагностики, автоматизированный, варианты, способ
Формула / Реферат:
1. Автоматизированный способ диагностики, содержащий следующие шаги: ввод в компьютер списка заболеваний, каждое из которых связано со списком симптомов, а каждый упомянутый симптом связан со списком вопросов, причём упомянутые симптомы и вопросы могут быть различными для каждого заболевания; повторяющееся задание вопросов из числа выбранных из списков вопросов для получения ответов, при этом упомянутые ответы устанавливают симптомы, каждый из...
Комплекс динамической защиты военной техники. комплекс динамической защиты башни.
Номер патента: 3291
Опубликовано: 24.04.2003
Авторы: Аникина Лидия Николаевна, Тумасов Владимир Дмитриевич, Алексеев Михаил Олегович, Васильев Вячеслав Иванович, Хейфиц Григорий Адольфович, Кимаев Алексей Михайлович, Михайленко Евгений Иванович, Егоров Александр Иванович, Илюнин Сергей Владимирович, Рототаев Дмитрий Александрович, Григорян Валерий Арменакович, Дорохов Николай Сергеевич, Чубаров Владимир Давидович, Молодняков Николай Александрович
МПК: F41H 5/007
Метки: комплекс, башни, техники, военной, защиты, динамической
Формула / Реферат:
1. Комплекс динамической защиты военной техники, включающий защиту башни и корпуса, отличающийся тем, что в нем защита башни и корпуса выполнена в виде модулей, при этом модуль корпуса может быть выполнен унифицированным в виде единого узла, состоящего из продольных несущих лонжеронов и поперечных ребер толщиной 0-100 мм, жестко соединенных между собой, образующих секции, в которые могут быть установлены (закреплены) защитные блоки. 2. Комплекс...
Компактный автоматизированный сепаратор радионуклидов
Номер патента: 5712
Опубликовано: 28.04.2005
Авторы: Юнг Джон И., Хайнс Джон Дж.
МПК: B01D 15/08
Метки: компактный, автоматизированный, радионуклидов, сепаратор
Формула / Реферат:
1. Способ автоматического разделения радионуклидов с использованием хроматографического процесса разделения, включающего множество разделяющих элементов, характеризующийся тем, что указанный способ включает следующие этапы: отображение на дисплее первой диаграммы протока, показывающей поток радионуклидов через первый набор разделяющих элементов из множества осуществляющих разделение элементов, но только в течение первого этапа...
Автоматизированный отбор проб и их анализ с использованием персонального пробоотборника-анализатора
Номер патента: 13659
Опубликовано: 30.06.2010
Авторы: Асна Ноам, Леви Хадас, Леви Дорон
МПК: A61B 10/00, A61B 5/00, A61B 5/15...
Метки: пробоотборника-анализатора, персонального, проб, использованием, автоматизированный, отбор, анализ
Формула / Реферат:
1. Система отбора проб и анализа проб, предоставляющая пациенту возможность проводить персональный отбор проб, содержащаяперсональный пробоотборник, содержащий корпус, устройство подготовки пробы и фотографическое устройство, причем пробоотборник предоставляет возможность передачи данных по сети по меньшей мере посредством одного сетевого разъема, и разъем источника питания, причем фотографическое устройство обеспечивает цифровое изображение...
Предыдущий патент: Способ и устройство для снижения патогенной и химической нагрузки в текучих отходах
Следующий патент: Способ и установка для получения гранулированного поликремния
Случайный патент: Способ получения энантиомерно обогащенных n-производных лактамов