Способ выбора управляющих воздействий для ввода послеаварийного режима энергосистемы в допустимую по условию апериодической статической устойчивости область
Номер патента: 17830
Опубликовано: 29.03.2013
Авторы: Лисицын Андрей Андреевич, Жуков Андрей Васильевич, Исаев Егор Владимирович, Демчук Анатолий Тимофеевич, Кац Пинкус Янкелевич
Формула / Реферат
Способ выбора управляющих воздействий для ввода послеаварийного режима энергосистемы в допустимую по условию апериодической статической устойчивости область, основанный на определении с использованием текущих значений параметров электрического режима параметров послеаварийного и предельного послеаварийного режимов, опасного сечения и допустимого по условиям статической апериодической устойчивости перетока активной мощности в опасном сечении, заключающийся в том, что по измеренным и достоверизованным параметрам доаварийного электрического режима энергосистемы и сигналу о срабатывании пускового органа определяют модули и фазы узловых напряжений установившихся послеаварийного и предельного послеаварийного режимов в энергосистеме путем совместного решения двух подсистем уравнений: линейных уравнений изменения баланса активной мощности в узлах, для всех узлов, кроме опорного, позволяющих осуществить прогноз изменения фаз узловых напряжений и ЭДС генераторов в послеаварийном режиме, в виде:
где Dj - вектор изменения фаз узловых напряжений при изменении режима;
D - расчетный вектор небалансов активной мощности в узлах схемы, равный на первом итерационном шаге аварийному вектору изменения доаварийного режима;
C - вещественная симметричная матрица, элементами которой являются выражения вида
где ½Ui½, ½Uj½- величины напряжения по концам ветви в узлах i, j;
½Yij½, ½Ktrij½ - модули соответственно проводимости и коэффициента трансформации ветви между узлами i, j; и нелинейных уравнений баланса токов в узлах схемы в виде
где A - известная комплексная матрица проводимостей сети, в диагональные элементы которой входят и проводимости нагрузок, вычисленные по данным их активной и реактивной мощности и величине напряжения в доаварийном режиме;
U - искомый вектор узловых напряжений;
B - вектор правой части, элементами которого являются выражения вида Eg´Yg: произведение комплекса ЭДС генератора на комплекс его проводимости; формируют итерационную процедуру расчета послеаварийного режима, свободную от зависимости сходимости от начального приближения и, как следствие, минимизирующую объем вычислений; определяют опасное сечение по критериальной функции
где i, j - начальный и конечный узел ветви;
½Ui½, ½Uj½- величины напряжения в узлах i и j;
Djij - изменение угла по ветви;
α - больше или равно 2 и не больше 10 (по умолчанию принято 4);
параметры с суффиксом _o относятся к исходному режиму, с суффиксом _pr - к предельному; осуществляют выбор управляющих воздействий на основе перебора всех сочетаний ступеней, разгружающих опасное сечение, и выбора из них управляющего воздействия, характеризующегося достаточным объемом и минимальной ценой.

Текст
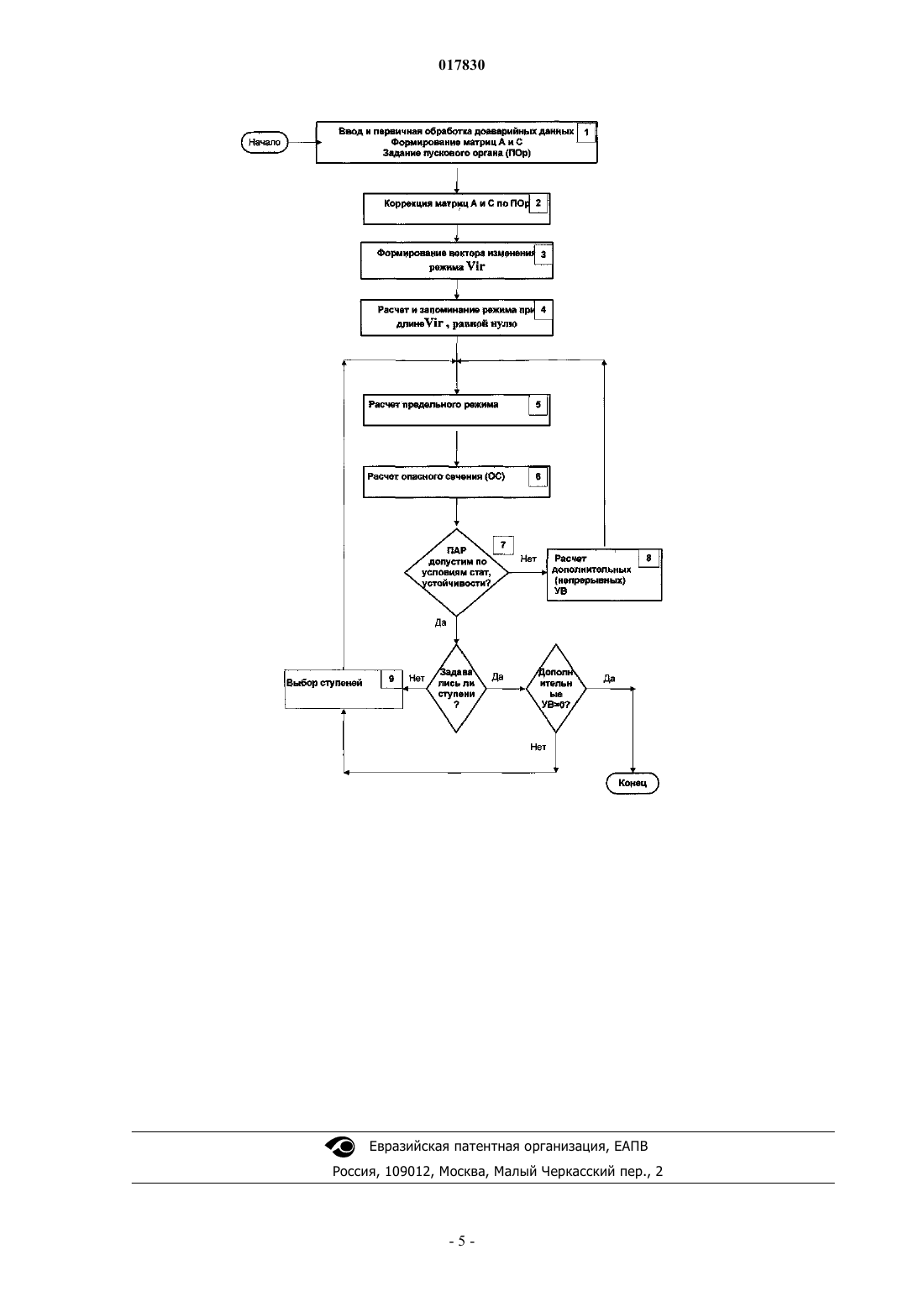
СПОСОБ ВЫБОРА УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ ДЛЯ ВВОДА ПОСЛЕАВАРИЙНОГО РЕЖИМА ЭНЕРГОСИСТЕМЫ В ДОПУСТИМУЮ ПО УСЛОВИЮ АПЕРИОДИЧЕСКОЙ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ ОБЛАСТЬ Кац Пинкус Янкелевич, Лисицын Андрей Андреевич, Исаев Егор Владимирович, Демчук Анатолий Тимофеевич, Жуков Андрей Васильевич (RU) Иващенко О.И. (RU) Технический результат заключается в выборе управляющих воздействий с минимальным объемом путем повышения точности и прозрачности расчетов на каждом из этапов решения задачи выбора управляющих воздействий. Способ выбора управляющих воздействий для ввода послеаварийного режима энергосистемы в допустимую по условию апериодической статической устойчивости область основан на определении с использованием текущих значений параметров электрического режима параметров послеаварийного и предельного послеаварийного режимов, опасного сечения и допустимого по условиям статической апериодической устойчивости перетока активной мощности в опасном сечении. Способ заключается в том, что по измеренным и достоверизованным параметрам доаварийного электрического режима энергосистемы о срабатывании пускового органа определяются модули и фазы узловых напряжений установившихся послеаварийного и предельного послеаварийного режимов в энергосистеме путем совместного решения двух подсистем уравнений: линейных уравнений изменения баланса активной мощности в узлах(для всех узлов кроме опорного), позволяющих осуществить прогноз изменения фаз узловых напряжений и ЭДС генераторов в послеаварийном режиме, и нелинейных уравнений баланса токов в узлах схемы, формируется итерационная процедура расчета послеаварийного режима, свободная от зависимости сходимости от начального приближения и, как следствие, минимизирующая объем вычислений; определяется опасное сечение по критериальной функции, осуществляется выбор управляющих воздействий на основе перебора всех сочетаний ступеней, разгружающих опасное сечение, и выбора из них управляющего воздействия, характеризующегося достаточным объемом и минимальной ценой.(71)(73) Заявитель и патентовладелец: ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО "СИСТЕМНЫЙ ОПЕРАТОР ЕДИНОЙ ЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ"; ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО "НАУЧНОТЕХНИЧЕСКИЙ ЦЕНТР ЕДИНОЙ ЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ" (RU) Изобретение относится к области электроэнергетики и, в частности, к системам противоаварийного автоматического управления режимом энергосистем. Известно, что во многом надежность и живучесть ЕЭС России обеспечивается противоаварийным автоматическим управлением. Одним из важнейших видов противоаварийного автоматического управления является автоматическое предотвращение нарушения устойчивости. При этом в послеаварийном режиме, обусловленном аварийным возмущением, необходимо обеспечить в подлежащем определению опасном сечении нормативный запас устойчивости с учетом нерегулярных колебаний [1]. Из этого следует необходимость решения следующих задач: расчет предельного режима для заданного возмущения; определение опасного сечения; расчет управляющих воздействий (УВ) для ввода послеаварийного режима в допустимую область. Классическое (по Ляпунову) суждение об устойчивости (или неустойчивости) в малом следует выносить на основе анализа изменений свободных координат системы при отклонении от исследуемого равновесного состояния. В нашем случае свободными координатами являются модули и фазы узловых напряжений. Модули и фазы узловых напряжений текущего доаварийного режима определяются путем достоверизации телеизмерений (узловых напряжений, инъекций и перетоков активной мощности) и телесигналов. Модули и фазы узловых напряжений в послеаварийном режиме, в том числе и в предельном послеаварийном режиме, в общем случае могут быть рассчитаны только путем решения нелинейных уравнений установившегося режима итерационными методами. Известно решение задач противоаварийного автоматического управления на базе совместного решения уравнений установившегося режима и уравнений границы области предельных режимов, содержащих в качестве параметра коэффициент запаса по устойчивости [2]. Отсутствие блока определения опасного сечения не позволяет учитывать нерегулярные колебания. Наиболее близким по технической сущности к предлагаемому изобретению является способ, реализованный в существующих в настоящее время в ЕЭС России адаптивных централизованных системах противоаварийной автоматики (ЦСПА), описанный в [3], в котором: прогноз послеаварийного режима осуществляется по линеаризованным уравнениям потокораспределения только активной мощности в предположении постоянства модулей узловых напряжений; анализ устойчивости осуществляется по так называемым узловым моделям, рассчитываемым для каждого узла расчетной схемы контролируемой ЦСПА района. Каждая узловая модель является эквивалентной схемой всего района управления для конкретного,центрального, узла. Определяется узловая модель путем исключения узлов (узловых напряжений) методом Гаусса (вычислительный аналог известного в электротехнике преобразования звезды в многоугольник) и ветвей методом исключения Жордана. Параметры узловых моделей (сопротивления ветвей,мощности генераторов и нагрузок в центральном узле, величины напряжений и эквивалентных ЭДС) определяются по параметрам исходного режима. Анализ устойчивости сводится к определению существования прогнозируемого режима в узловых моделях и вычислительно является заменой совместного решения нелинейных уравнений установившегося режима расчетной схемы несовместным решением уравнений режима для узловых моделей. Заключение о существовании режима в схеме выносится при существовании режима во всех узловых моделях. Режим считается несуществующим, если он не существует хотя бы для одной узловой модели; определение опасного сечения осуществляется на базе известного алгоритма Форда-Фалкерсона: линейного прогноза перетоков активной мощности и предельных их значений по каждой из ветвей схемы, определяемых при анализе устойчивости; расчет объема и мест приложения УВ осуществляется по узловым моделям, с учетом эффективности управления, определяемой по уравнениям прогноза послеаварийного режима. Основным недостатком методов решения перечисленных выше задач в существующих ЦСПА (прототипе) является серьезность заложенных в них допущений. Следствием этого является необходимость выполнения большой предварительной расчетной работы по созданию расчетной схемы ЦСПА для получения приемлемых по точности результатов и возможная избыточность объема УВ. Целью предлагаемого изобретения является минимизация объема предварительных расчетов и выбор УВ с минимальным объемом путем повышения точности и прозрачности расчетов на каждом из этапов решения задачи выбора УВ. Указанная цель достигается тем, что по измеренным и достоверизованным параметрам доаварийного электрического режима энергосистемы (модулей и фаз узловых напряжений, узловых инъекций, перетоков мощности в ветвях) при поступлении сигнала о срабатывании пускового органа определяются (вычисляются) модули и фазы узловых напряжений установившихся послеаварийного и предельного послеаварийного режимов в общепринятой расчетной модели энергосистемы, путем совместного решения двух подсистем уравнений: линейных уравнений изменения баланса активной мощности в узлах (для всех узлов кроме опорного), позволяющих осуществить прогноз изменения фаз узловых напряжений и ЭДС генераторов в послеаварийном режиме, в виде где- вектор изменения фаз узловых напряжений при изменении режима;D - расчетный вектор небалансов активной мощности в узлах схемы, равный на первом итерационном шаге аварийному вектору изменения доаварийного режима;C - вещественная симметричная матрица, элементами которой являются выражения вида где Ui, Uj - величины напряжения по концам ветви в узлах i,j;Yij, Ktrij - модули соответственно проводимости и коэффициента трансформации ветви между узлами i, j; и нелинейных уравнений баланса токов в узлах схемы в виде где A - известная комплексная матрица проводимостей сети, в диагональные элементы которой входят и проводимости нагрузок, вычисленные по данным их активной и реактивной мощности и величине напряжения в доаварийном режиме;U - искомый вектор узловых напряжений;B - вектор правой части, элементами которого являются выражения вида EgYg: произведение комплекса ЭДС генератора на комплекс его проводимости. Некоторым расширением расчетной модели энергосистемы является представление генератора в виде ЭДС за реактивностью, которая по умолчанию принимается достаточно малой величиной - 10-6 Ом. Это практически не влияет на точность расчета режимов при сопоставлении с расчетами по известным программным комплексам, но дополнительно позволяет, при необходимости, учесть статизм регулирования напряжения, задав полное сопротивление генератора и коэффициент регулирования по каналу отклонения напряжения от заданной уставки; формируется оригинальная итерационная процедура расчета режима с применением постоянных обратных матриц С-1 и А-1, свободная от присущей известным модификациям метода Ньютона, применяющихся для расчета уравнений установившегося режима, зависимости сходимости от начального приближения и, как следствие, необходимости утяжеления небольшими шагами для достижения большего предела, минимизирующая объем вычислений; определяется опасное сечение по критериальной функции где i, j - начальный и конечный узел ветви;ij - изменение угла по ветви;- больше или равно 2 и не больше 10 (по умолчанию принято 4); параметры с суффиксом o относятся к исходному режиму, с суффиксом pr - к предельному режиму; осуществляется выбор ступеней УВ на основе перебора всех сочетаний ступеней, разгружающих опасное сечение, и выбора из них необходимого УВ, характеризующегося достаточным объемом и минимальной ценой. Эффективность и работоспособность предлагаемого способа может быть проиллюстрирована следующим образом. На чертеже приведена функциональная схема устройства, реализующего заявленный способ на основе цифровой вычислительной техники. В блоке 1 по измеренным и достоверизованным параметрам доаварийной схемы и доаварийного электрического режима энергосистемы формируются матрицы С и А уравнений установившегося режима. Вычисляются величины ЭДС генераторов. Задается информация о срабатывании пускового органа(ПОр). В блоке 2 выполняется коррекция схемы, режимных параметров и матриц С и А по ПОр (отключенным ветвям схемы, изменениям генерации и потребления в узлах). В блоке 3 по данным блоков 1 и 2 вычисляется вектор Vneb небалансов (изменений) генерации и потребления активной и реактивной мощности в узлах схемы, обусловленных срабатыванием ПОр. Формируется вектор изменения режима (от доаварийного к послеаварийному) в виде где Lvir - длина Vir. Формируется вектор нагрузок в узлах схемы для расчета установившихся режимов в послеаварийной схеме в виде где Sno - доаварийные нагрузки, скорректированные по ПОр в блоке 2. В блоке 4 рассчитывается и запоминается режим для значения Lvir, равного нулю. В этом режиме напряжения в узлах и ЭДС генераторов, по величине и по фазе, совпадают с таковыми в доаварийном режиме (с точностью до заданных малых величин). При расчете режима учитываются статические характеристики нагрузок по напряжению (в форме полиномов второй степени) и ограничения по выдаче и приему реактивной мощности генераторов. В последнем случае выполняется переход с модели генератора с заданными активной мощностью и величиной генераторного напряжения на модель с заданными активной и реактивной мощностью. Обращение матриц А и С выполняется один раз с учетом их слабой заполненности. При каждом переходе на модель генератора с заданной активной и реактивной мощностью известными из линейного программирования приемами вычисляются корректирующие множители к обратной матрице А-1, что существенно ускоряет расчет. Расчет установившегося режима требует задания мощности нагрузок и генераторов. Учет изменения частоты предусматривает задание известной линейной зависимости указанных параметров режима от частоты (с помощью регулирующих эффектов по частоте генерации и потребления). Расчет, для заданного значения Lvir, выполняется циклически до тех пор, пока не станут достаточно близкими последовательно рассчитанные значения потерь активной мощности. В блоке 5 выполняется расчет предельного послеаварийного режима, который сводится к определению предельного по сходимости значения Lvir и соответствующих ему электрических параметров режима. В блоке 6 по результатам работы блоков 4 и 5 выполняется расчет опасного сечения (ОС). Критериальная функция для определения ветвей-претендентов на ветви опасного сечения (ОС) построена как гдеij - изменение угла по ветви;- больше или равно 2 и не больше 10 (по умолчанию принято 4); параметры с суффиксом o относятся к исходному режиму, с суффиксом pr - к предельному. Сконструированный критерий выделения самой опасной ветви дополнен топологическим анализом, в результате которого выявляется цепочка ветвей, смежных с выделенной и с направлением перетока активной мощности, совпадающим с направлением перетока в выделенной ветви. На следующем шаге выделенная ветвь и соответствующая ей цепочка удаляется из анализа. Так продолжается до тех пор,пока выявленная совокупность ветвей не разделит схему на две части. При этом, в общем случае, не все ветви-претенденты образуют опасное сечение, что определяется дополнительным топологическим анализом: узлы ветвей опасного сечения должны входить в разные части. В блоке 7 выполняется анализ допустимости послеаварийного режима (ПАР) по допустимости перетока в опасном сечении, определяемого предельным перетоком с запасом 8% и с учетом нерегулярных колебаний. Если допустимый переток больше или равен расчетному перетоку в послеаварийном режиме(для Lvir = 1), то делается вывод о допустимости послеаварийного режима. В противном случае ответ отрицательный, при этом разница между расчетным и допустимым значениями перетоков определяет необходимую величину разгрузки опасного сечения - Рразгрузки. В блоке 8 выполняется расчет необходимой величины разгрузки ОС как разницы между расчетным и допустимым значениями перетоков в ОС. Эта величина определяет, с учетом эффективности разгрузки,и величину УВ. В цикле, организованном по схеме Гаусса, осуществляется выбор УВ в предположении возможности управления генерацией и нагрузкой во всех узлах с непрерывным изменением мощности (вплоть до полного отключения) - назовем как непрерывные УВ. Распределение УВ типа ОН (отключение нагрузки) выполняется в узлах с наибольшим снижением напряжения. При распределении УВ типа ОГ (отключение генератора) предпочтение отдается генераторам с наибольшим изменением фазы ЭДС при утяжелении режима (по аналогии со скольжением в динамическом переходном процессе). Суммарные непрерывные УВ являются исходными данными для выбора ступеней УВ. В блоке 9 выполняется расчет ступеней УВ на основе перебора всех сочетаний ступеней, разгружающих опасное сечение, и выбора из них УВ с объемом не меньше суммарных непрерывных и с минимальной ценой (назначаемой технологом). При выборе ступеней, путем проб на понижение или повышение ступеней, осуществляется окончательная балансировка УВ по условиям допустимого небаланса. Вычислительная эффективность способа обеспечивается использованием постоянных обратных матриц С-1 и А-1 в расчетах предельных режимов. Тестирование предлагаемого способа в схемах ОЭС Востока, Урала и Тюменской энергосистемы позволяет сделать заключение и o высокой результирующей эффективности. Использованные источники информации 1. Методические рекомендации по устойчивости энергосистем. Утверждены Приказом Минэнерго России 277 от 30.06.2003 г. 2. Аржанников С.Г., Захаркин О.В., Петров A.M. Оценка запаса устойчивости установившегося режима ЭС и выбор управления для его ввода в допустимую область, электронный журнал Новое в российской электроэнергетике, 2005,5. 3. Юдин А.В., Масайлов Ю.В. Разработка расчетного блока оценки устойчивости аварийных режимов и дозировка управляющих воздействий для промышленного варианта централизованной автоматики ОЭС Урала, электронный журнал Новое в российской электроэнергетике, 2003,11. ФОРМУЛА ИЗОБРЕТЕНИЯ Способ выбора управляющих воздействий для ввода послеаварийного режима энергосистемы в допустимую по условию апериодической статической устойчивости область, основанный на определении с использованием текущих значений параметров электрического режима параметров послеаварийного и предельного послеаварийного режимов, опасного сечения и допустимого по условиям статической апериодической устойчивости перетока активной мощности в опасном сечении, заключающийся в том, что по измеренным и достоверизованным параметрам доаварийного электрического режима энергосистемы и сигналу о срабатывании пускового органа определяют модули и фазы узловых напряжений установившихся послеаварийного и предельного послеаварийного режимов в энергосистеме путем совместного решения двух подсистем уравнений: линейных уравнений изменения баланса активной мощности в узлах, для всех узлов, кроме опорного, позволяющих осуществить прогноз изменения фаз узловых напряжений и ЭДС генераторов в послеаварийном режиме, в виде: где- вектор изменения фаз узловых напряжений при изменении режима;D - расчетный вектор небалансов активной мощности в узлах схемы, равный на первом итерационном шаге аварийному вектору изменения доаварийного режима;C - вещественная симметричная матрица, элементами которой являются выражения вида где Ui, Uj- величины напряжения по концам ветви в узлах i, j;Yij, Ktrij - модули соответственно проводимости и коэффициента трансформации ветви между узлами i, j; и нелинейных уравнений баланса токов в узлах схемы в виде где A - известная комплексная матрица проводимостей сети, в диагональные элементы которой входят и проводимости нагрузок, вычисленные по данным их активной и реактивной мощности и величине напряжения в доаварийном режиме;U - искомый вектор узловых напряжений;B - вектор правой части, элементами которого являются выражения вида Eg Yg: произведение комплекса ЭДС генератора на комплекс его проводимости; формируют итерационную процедуру расчета послеаварийного режима, свободную от зависимости сходимости от начального приближения и, как следствие, минимизирующую объем вычислений; определяют опасное сечение по критериальной функции где i, j - начальный и конечный узел ветви;ij - изменение угла по ветви;- больше или равно 2 и не больше 10 (по умолчанию принято 4); параметры с суффиксом o относятся к исходному режиму, с суффиксом pr - к предельному; осуществляют выбор управляющих воздействий на основе перебора всех сочетаний ступеней, разгружающих опасное сечение, и выбора из них управляющего воздействия, характеризующегося достаточным объемом и минимальной ценой.
МПК / Метки
МПК: H02J 13/00, H02J 3/24
Метки: энергосистемы, способ, управляющих, выбора, ввода, режима, область, послеаварийного, допустимую, условию, статической, воздействий, устойчивости, апериодической
Код ссылки
<a href="https://eas.patents.su/6-17830-sposob-vybora-upravlyayushhih-vozdejjstvijj-dlya-vvoda-posleavarijjnogo-rezhima-energosistemy-v-dopustimuyu-po-usloviyu-aperiodicheskojj-staticheskojj-ustojjchivosti-oblast.html" rel="bookmark" title="База патентов Евразийского Союза">Способ выбора управляющих воздействий для ввода послеаварийного режима энергосистемы в допустимую по условию апериодической статической устойчивости область</a>
Способ обеспечения коррозионной устойчивости железобетонной конструкции со стальной арматурой (варианты) и система для обеспечения ее коррозионной устойчивости
Номер патента: 5454
Опубликовано: 24.02.2005
Автор: Люблинский Ефим Я.
МПК: C23F 13/00
Метки: коррозионной, способ, железобетонной, устойчивости, стальной, варианты, обеспечения, арматурой, система, конструкции
Формула / Реферат:
1. Способ обеспечения коррозионной устойчивости железобетонной конструкции со стальной арматурой, отличающийся тем, что включает в себя первый этап подачи на поверхность конструкции в основном нейтрального электролита и пропускания первого постоянного тока между стальной арматурой в конструкции и электродом, расположенным смежно с внешней поверхностью конструкции, для инициирования переноса ионов к электроду до установления в основном постоянной...
Способ определения места по меньшей мере двух воздействий
Номер патента: 16092
Опубликовано: 28.02.2012
Авторы: Щевин Оливье, Кир Инг Рос, Духейлле Реми
МПК: H03K 17/96, G06F 3/043, G06F 17/15...
Метки: определения, места, мере, способ, меньшей, воздействий, двух
Формула / Реферат:
1. Способ определения мест по меньшей мере двух воздействий F1 и F2, действующих одновременно или последовательно в течение короткого промежутка времени, на поверхность контактной пластины человекомашинного интерфейса с использованием по меньшей мере одного акустического датчика Si, где i=1-n (n - количество датчиков), причем указанные воздействия F1 и F2 порождают акустический сигнал, принимаемый по меньшей мере одним датчиком, при этом каждый...
Способ выбора рабочих условий реактора
Номер патента: 17253
Опубликовано: 30.11.2012
Автор: Левалль Андре
МПК: C08F 210/16, C08F 2/00
Метки: рабочих, способ, реактора, выбора, условий
Формула / Реферат:
1. Способ выбора рабочих условий реактора в сдвоенном петлевом суспензионном реакторе для получения гомо- или сополимера с заданной плотностью и показателем текучести расплава в присутствии металлоценовой каталитической системы, включающий следующие стадии:а) выбор n входных параметров, связанных с реакционными условиями;б) определение модели нейронной сети с ограничениями общей формыгде Xi представляют собой нормализованные по n входные...
Способ ввода символов в электронно-вычислительные устройства и матрица для ввода символов в электронно-вычислительные устройства
Номер патента: 10450
Опубликовано: 29.08.2008
Автор: Самаль Дмитрий Иванович
МПК: G06F 15/02, H03M 11/12
Метки: способ, матрица, устройства, символов, электронно-вычислительные, ввода
Формула / Реферат:
1. Способ ввода символов в электронно-вычислительные устройства, преимущественно в мобильные телефоны, банкоматы, цифровые телевизоры, электронные наладонные органайзеры/записные книжки, электронные переводчики, вводимых с помощью клавиатур, отличающийся тем, что символы используемого языка разбивают на группы, в процессе ввода текста на экране устройства отображают изображения клавиш клавиатуры устройства, с возможностью возникновения...
Способ измерения механических силовых воздействий между материальными объектами и устройства для его осуществления
Номер патента: 241
Опубликовано: 25.02.1999
Авторы: Копелиович Дмитрий Бенедиктович, Линник Лев Николаевич, Вишневский Александр Степанович
Метки: материальными, силовых, осуществления, механических, воздействий, измерения, между, объектами, устройства, способ
Формула / Реферат:
1. Способ измерения механических силовых воздействий между материальными объектами, включающий в себя приведение в механический контакт взаимодействующих объектов и измерительных блоков, измерение электромеханических параметров, определяемых величиной силового воздействия, передачу информации об этих параметрах от измерительных блоков к микропроцессорному блоку, обработку этих параметров и получение на ее основе величин, характеризующих...
Предыдущий патент: Микрооптическая система для визуального контроля аутентичности изделий
Следующий патент: Пищевая композиция, связывающая ацетальдегид, и способ еt приготовления
Случайный патент: Система для обнаружения утечек текучей среды