Способ регулирования положения отсечного золотника с динамической коррекцией положения “нуля”, применяемый в системе регулирования паровой турбины
Номер патента: 13903
Опубликовано: 30.08.2010
Авторы: Федосовский Михаил Евгеньевич, Кушбасов Асылхан Нариманович, Дунаев Вадим Игоревич
Формула / Реферат
1. Способ регулирования положения отсечного золотника, управляющего перемещением сервомотора, в свою очередь управляющего клапанами паровой турбины в системе регулирования паровой турбины, с динамической коррекцией смещения ²нуля² отсечного золотника, включающий
определение требуемой величины перемещения отсечного золотника для достижения заданного положения сервомотора и
перемещение отсечного золотника в соответствии с ранее определенным значением,
отличающийся тем, что на этапе определения величины перемещения отсечного золотника до начала регулирования измеряют значения смещения ²нуля² отсечного золотника в различных положениях штока сервомотора во всем диапазоне перемещения этого штока; а
при регулировании производят расчет величины динамической коррекции смещения нуля для заданного положения штока сервомотора с учетом смещения ²нуля², измеренного для текущего положения штока сервомотора, и
величину перемещения отсечного золотника осуществляют в соответствии с рассчитанной величиной динамической коррекции смещения нуля.
2. Способ по п.1, отличающийся тем, что для регулирования положения отсечного золотника применяют электромеханический преобразователь, шток которого жестко соединен со штоком отсечного золотника, образуя единое звено регулирования.
3. Способ по п.1, отличающийся тем, что при ручном измерении смещения ²нуля² отсечного золотника принудительно позиционируют сервомотор последовательно в несколько положений и для каждого положения штока сервомотора определяют смещение ²нуля² отсечного золотника по индикации соответствующих датчиков положения.
4. Способ по п.1, отличающийся тем, что при измерении смещения ²нуля² отсечного золотника с применением программируемого контроллера позиционируют сервомотор последовательно в несколько положений с заданным шагом, указанный программируемый контроллер регистрирует показания датчика положения, расположенного на штоке сервомотора, при наличии колебаний сервомотора измеряет интегральную составляющую соответствующих колебаний отсечного золотника до стабилизации сервомотора и регистрирует смещение ²нуля² отсечного золотника с учетом этой интегральной составляющей.
5. Способ по п.1, отличающийся тем, что в системе автоматического регулирования с резервированием, содержащей более одного канала управления, измерение смещений ²нуля² отсечного золотника выполняют отдельно для каждого канала.
6. Способ по п.1, отличающийся тем, что в системе автоматического регулирования, содержащей более одного сервомотора, измерение смещений ²нуля² отсечного золотника выполняют отдельно для каждого сервомотора.
Текст
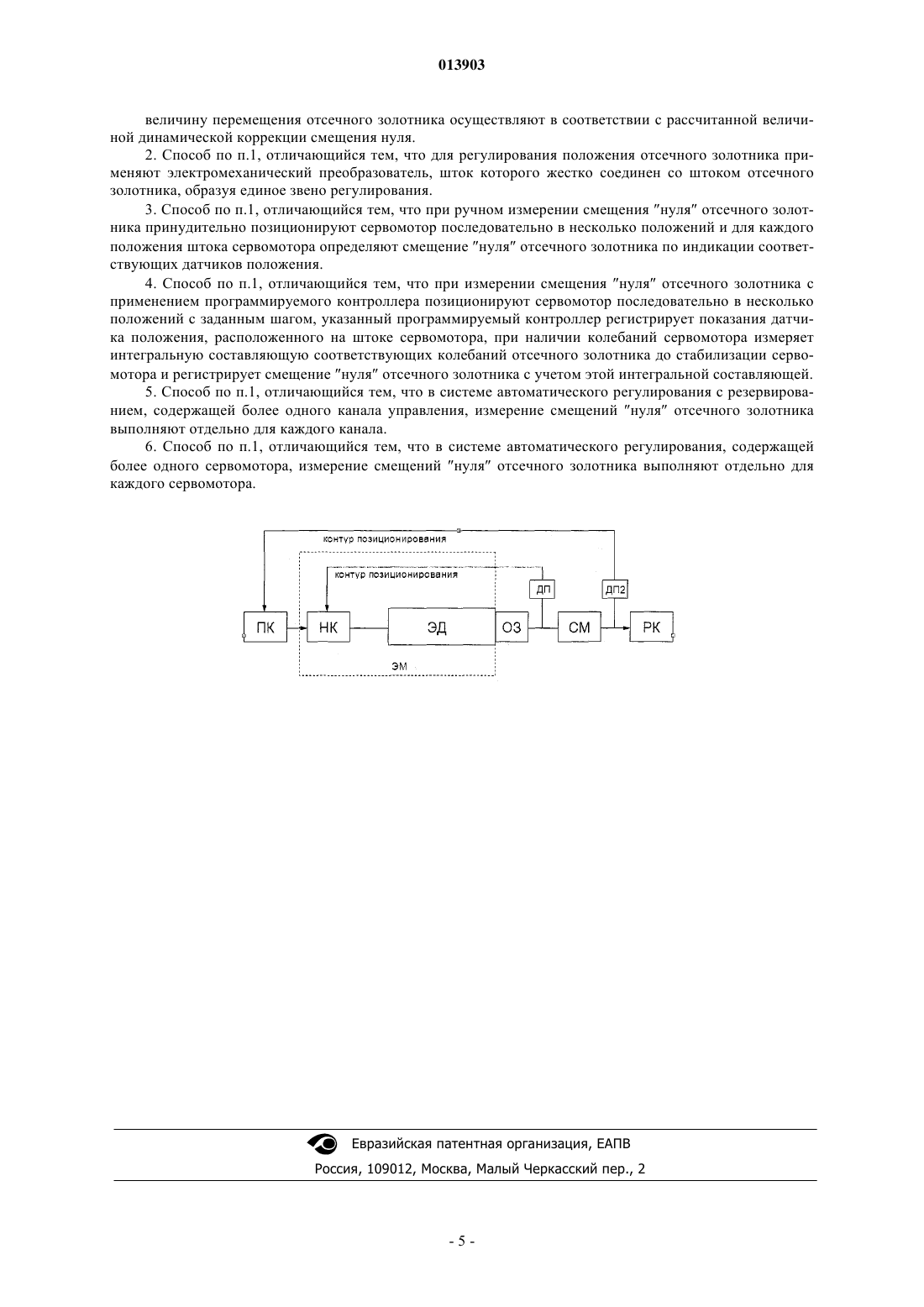
СПОСОБ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОТСЕЧНОГО ЗОЛОТНИКА С ДИНАМИЧЕСКОЙ КОРРЕКЦИЕЙ ПОЛОЖЕНИЯ "НУЛЯ", ПРИМЕНЯЕМЫЙ В СИСТЕМЕ РЕГУЛИРОВАНИЯ ПАРОВОЙ ТУРБИНЫ Кушбасов Асылхан Нариманович, Дунаев Вадим Игоревич, Федосовский Михаил Евгеньевич (RU)(71)(73) Заявитель и патентовладелец: ЗАКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО "ДИАКОНТ" (RU) Изобретение относится к области энергетики и может быть использовано в электрогидравлических системах регулирования паровых турбин с применением средств микропроцессорной техники. Предложен способ регулирования положения отсечного золотника, управляющего перемещением сервомотора, в свою очередь управляющего клапанами паровой турбины в системе регулирования паровой турбины, с динамической коррекцией смещения нуля отсечного золотника, включающий определение требуемой величины перемещения отсечного золотника для достижения заданного положения сервомотора и перемещение отсечного золотника в соответствии с ранее определенным значением, отличающийся тем, что на этапе определения величины перемещения отсечного золотника до начала регулирования измеряют значения смещения нуля отсечного золотника в различных положениях штока сервомотора во всем диапазоне перемещения этого штока; а при регулировании производят расчет величины динамической коррекции смещения нуля для заданного положения штока сервомотора с учетом смещения нуля, измеренного для текущего положения штока сервомотора, и учитывают динамическую коррекцию нуля при определении величины перемещения отсечного золотника. Техническим результатом является повышение точности позиционирования регулирующих клапанов вследствие минимизации пульсаций сервомотора в установившемся режиме путем коррекции положения нуля отсечного золотника при изменении текущих условий работы системы регулирования. 013903 Изобретение относится к области энергетики и может быть использовано в электрогидравлических системах регулирования паровых турбин с применением средств микропроцессорной техники. Регулирование паровой турбиной осуществляется посредством регулирования положения отсечного золотника, перемещающего шток сервомотора, который в свою очередь управляет регулирующими клапанами, т.е. подачей пара на турбину. Применяемые способы регулирования положения отсечного золотника предполагают нахождение отсечного золотника в определенном однозначном положении, соответствующем установившемуся положению сервомотора. Однако для паровых турбин с высоконагруженными сервомоторами это не соответствует действительности. Под действием многочисленных, зачастую не поддающихся прогнозированию факторов, таких как температура, завоздушенность, давление масла, износ трущихся деталей и др., нулевое положение отсечного золотника изменяется, что приводит к пульсациям сервомотора и тем самым снижается точность позиционирования регулирующих клапанов,а также снижается ресурс органов парораспределения. Известен способ регулирования положения отсечного золотника, изложенный в DE 4236846 (А 1). Способ основан на использовании гидравлической системы регулирования положения отсечного золотника, в которой в дополнение к отсечному золотнику применен вспомогательный клапан, снабженный электромагнитным устройством с регулятором положения, с помощью которого вспомогательный клапан сообщает отсечному золотнику перемещение на величину, соответствующую рассогласованию между действительным и заданным положением штока сервомотора. Известный способ не представляет сложности для реализации, однако не обладает высокой точностью и быстродействием. Кроме того известный способ обладает существенным недостатком, присущим гидравлической системе регулирования, зависимостью золотниковых элементов с малыми перестановочными усилиями от качества масла, т.е. от попадания механических частиц, которые всегда присутствуют в масле, даже если оно имеет безукоризненные показатели по результатам контрольного отбора. Более совершенный способ регулирования положения отсечного золотника изложен в US 2004081549 (А 1). В электрогидравлической системе автоматического регулирования скорости вращения турбины в контур регулирования положения отсечного золотника включен электромеханический преобразователь, контроллер для управления этим преобразователем и логический модуль, обрабатывающий сигналы обратной связи из внешних контуров положения сервомотора и скорости вращения турбины. Электромеханический преобразователь выполнен с использованием двух электромагнитных катушек,одна из которых является основной, а другая дополнительной. Основная катушка создает перестановочное усилие для перемещения отсечного золотника в соответствии с сигналом задания от контроллера,дополнительная катушка запитывается отдельно и создает дополнительное перестановочное усилие по сигналу задания от логического модуля. Использование дополнительной электромагнитной катушки позволяет, когда это необходимо, компенсировать недостаточное перемещение отсечного золотника, создаваемое основной катушкой, и таким образом повысить точность регулирования. Однако существенным недостатком этого способа является тот факт, что регулирование производят по сигналам обратной связи с задержкой, обусловленной быстродействием системы регулирования, с предустановленными параметрами контроллеров и без учта изменения текущих условий работы системы регулирования, что не позволяет минимизировать пульсации сервомотора в установившемся режиме. Задачей предлагаемого изобретения является существенное повышение точности позиционирования регулирующих клапанов вследствие минимизации пульсаций сервомотора в установившемся режиме путем коррекции положения нуля отсечного золотника при изменении текущих условий работы системы регулирования, а также решение проблемы отказов системы автоматического регулирования по причине попадания в золотниковые устройства механических частиц. Указанная задача решена благодаря тому, что в способе регулирования положения отсечного золотника, управляющего перемещением сервомотора, в свою очередь управляющего клапанами паровой турбины в системе регулирования паровой турбины, с динамической коррекцией смещения нуля отсечного золотника, включающем определение требуемой величины перемещения отсечного золотника для достижения заданного положения сервомотора и перемещение отсечного золотника в соответствии с ранее определенным значением, на этапе определения величины перемещения отсечного золотника до начала регулирования измеряют значения смещения нуля отсечного золотника в различных положениях штока сервомотора во всем диапазоне перемещения этого штока, а при регулировании производят расчет величины динамической коррекции смещения нуля для заданного положения штока сервомотора с учетом смещения нуля, измеренного для текущего положения штока сервомотора, и учитывают динамическую коррекцию нуля при определении величины перемещения отсечного золотника. До начала регулирования измеряют значения смещения нуля отсечного золотника в различных положениях штока сервомотора во всем диапазоне его перемещений, и в результате этих измерений получают зависимость смещения нуля отсечного золотника от положения сервомотора, которая отражает влияние регулирующего клапана и связанных с ним пружин на смещение нуля отсечного золотника. Кроме того, когда пар податся в турбину, смещение нуля происходит из-за усилий, создаваемых паром на регулирующий клапан, и изменения давления масла в линии сервомотора. Смещение нуля от-1 013903 сечного золотника приводит к снижению точности, а следовательно многократным итерациям регулирования, что приводит к пульсациям сервомотора. Для компенсации указанных влияний вычисляют величину динамической коррекции смещения нуля для заданного положения штока сервомотора. Эту величину вычисляют с учетом значений смещения нуля, измеренных до начала регулирования, и интегральной составляющей, отражающей влияние факторов, появляющихся при подаче пара в турбину. Вычисленную величину динамической коррекции учитывают при определении требуемого положения отсечного золотника для достижения заданного положения сервомотора, благодаря чему компенсируют перечисленные выше негативные влияния и минимизируют пульсации сервомотора, тем самым повышая точность регулирования. В предпочтительном варианте реализации перемещение отсечного золотника осуществлено с помощью электромеханического преобразователя. В этом случае штоки электромеханического преобразователя и отсечного золотника жестко соединены, образуя единое звено регулирования. В контуре позиционирования отсечного золотника имеется датчик положения отсечного золотника. Перемещение отсечного золотника определяет изменение положения сервомотора. Контур позиционирования сервомотора является внешним по отношению к контуру позиционирования отсечного золотника, и в нм также имеется датчик положения, установленный на штоке сервомотора. В описании настоящего изобретения термин положение сервомотора применен для упрощения и обозначает положение штока сервомотора. Измерение смещения нуля отсечного золотника в зависимости от положения сервомотора возможно выполнять как вручную, так и с помощью автоподстройки. При ручном измерении принудительно позиционируют сервомотор в различные положения во всм диапазоне его регулирования и для каждого из этих положений сервомотора регистрируют смещение нуля отсечного золотника по показаниям датчика положения отсечного золотника. Измерение смещений нуля отсечного золотника выполняют с применением программируемого контроллера в контуре позиционирования сервомотора. Последовательно позиционируют сервомотор в несколько положений с заданным шагом, указанный программируемый контроллер регистрирует показания датчика положения, расположенного на штоке сервомотора, и при наличии колебаний сервомотора изменяет интегральную составляющую соответствующих колебаний отсечного золотника до стабилизации сервомотора, затем регистрирует смещение нуля отсечного золотника с учетом этой интегральной составляющей. Измерение смещений нуля отсечного золотника с помощью автоподстройки позволяет достичь большей точности регулирования, при этом процесс измерений требует больше времени, чем при менее точном ручном измерении. Полученные данные, как при ручном, так и при автоматическом измерении, хранят в виде массива в памяти программируемого контроллера и используют в виде коррекции при определении требуемой величины перемещения отсечного золотника для достижения заданного положения сервомотора. Определение величины перемещения отсечного золотника выполняет программируемый контроллер, влючнный в контур позиционирования сервомотора. При определении требуемой величины перемещения отсечного золотника учитывается динамическая коррекция смещения нуля отсечного золотника, которая вычисляется с учетом составляющей элемента массива смещения нуля для текущего положения сервомотора, измеренной в режиме опробования. В САР с резервированием, содержащих более одного канала управления, измерение смещений нуля отсечного золотника и формирование массива измеренных значений выполняют отдельно для каждого канала и применяют динамическую коррекцию положения нуля отсечного золотника при работе любого канала управления. В САР, содержащих более одного СМ, измерение смещений нуля отсечного золотника и формирование массива измеренных значений выполняют отдельно для каждого СМ и применяют динамическую коррекцию положения нуля отсечного золотника при работе любого СМ. Позиционирование отсечного золотника с учетом динамической коррекции нуля позволяет минимизировать амплитуду колебаний отсечного золотника в установившемся режиме, а следовательно амплитуду пульсаций сервомотора. Кроме того, используемый в предлагаемом способе для перемещения отсечного золотника электро-механический преобразователь позволяет развить значительное усилие, что позволяет решить проблему отказов САР вследствие попадания в золотниковые устройства механических частиц. Система автоматического регулирования паровой турбины, как правило, содержит следующие контуры регулирования, перечисленные по порядку следования от внешнего к внутреннему: контур регулирования активной мощности турбогенератора, регулирования частоты вращения ротора турбины, поддержания давления пара, контур позиционирования сервомотора и контур позиционирования отсечного золотника. Для описания предлагаемого способа регулирования положения отсечного золотника интерес представляет контур позиционирования сервомотора и внутренний по отношению к нему контур позиционирования отсечного золотника. Поэтому в описании предлагаемого способа регулирования контуры регулирования, внешние по отношению к контуру позиционирования сервомотора не рассматриваются.-2 013903 На чертеже схематично показан фрагмент САР, содержащий контур позиционирования сервомотора. Как показано на чертеже, контур позиционирования сервомотора СМ является внешним по отношению к контуру позиционирования отсечного золотника ОЗ в системе автоматического регулирования. Контур позиционирования ОЗ включает в себя внутренние контуры регулирования скорости и тока, которые для простоты изложения не изображены на чертеже. На аппаратном уровне контур позиционирования ОЗ сформирован электромеханическим преобразователем ЭМП и датчиком ДП 1 положения ОЗ. ЭМП в свою очередь содержит настраиваемый контроллер НК, электродвигатель ЭД и выходной шток,связанный с ротором ЭД механизмом, преобразующим вращательное движение ротора в поступательное движение штока. При этом шток ЭМП жестко соединен со штоком отсечного золотника, образуя единое звено контура регулирования. Таким образом, задача позиционирования ОЗ приведена к регулированию вращения электродвигателя. НК осуществляет регулирование вращения электродвигателя в соответствии с сигналом задания на перемещение ОЗ, полученным от программируемого контроллера (ПК) из внешнего контура позиционирования СМ. НК выполнен с возможностью предварительной настройки уставок по току и скорости в соответствии с применяемым электродвигателем. Датчик положения СМ (ДП 2) включен в контур позиционирования СМ, внешний по отношению к контуру позиционирования ОЗ. ДП 2 установлен на штоке сервомотора, имеющем жесткую механическую связь с регулирующим клапаном турбины РК. Сигнал указанного датчика, соответствующий текущему положению СМ, поступает в ПК, который вычисляет величину перемещения ОЗ, требуемого для достижения заданного положения СМ. Заданное положение СМ также определяет ПК на основании сигналов от внешних конуров САР паровой турбины, не изображнных на черетеже. Предлагаемый способ регулирования положения ОЗ с динамической коррекцией нуля включает на первом этапе получение зависимости смещения нуля отсечного золотника от положения штока сервомотора во всем диапазоне регулирования СМ. С этой целью принудительно позиционируют СМ в раличные положения во всм диапазоне его регулирования и для каждого из этих положений сервомотора измеряют соответствующее смещение нуля отсечного золотника. Измерение может быть выполнено как вручную, посредством визуальной регистрации показаний датчиков, так и при помощи автоподстройки. Ручное измерение выполняют при выключенном генераторе и остановленной турбине. При ручном измерении отключают контур автоматического позиционирования СМ и принудительно позиционируют СМ последовательно в несколько положений с произвольно выбранным шагом, проходя при этом весь диапазон регулирования СМ. Для каждого положения СМ измеряют соответствующее ему смещение нуля ОЗ. Измерение положений СМ и ОЗ производится визуально по индикации датчиков положения СМ и ОЗ. Полученный массив значений записывают в память ПК. Смещения нуля ОЗ,соответствующие промежуточным значениям положения СМ, получают путм аппроксимации, формируя таким образом массив заданной размерности. Например, для СМ с диапазоном регулирования от 0 до 320 мм позиционируют СМ с шагом 10 мм и получают 32 значения смещения нуля ОЗ, затем вычисляют промежуточные значения методом аппроксимации и таким образом получают массив из 320 значений смещения нуля ОЗ. Ручное измерение смещений ОЗ применяют в случае, когда не требуется высокая точность коррекции. Автоподстройку выполняют с применением ПК при включенном контуре автоматического позиционирования СМ. Задают последовательное позиционирование СМ с шагом 1 мм во всм диапазоне регулирования. В этом режиме автоматического позиционирования СМ при определении смещения ОЗ учитывают не только пропорциональную, но и интегральную составляющую. По сигналу с датчика ДП 2 ПК определяет наличие колебаний СМ, при этом каждые 10 мс вычисляет интегральную составляющую для минимизации соответствующих колебаний положения ОЗ и накапливает эту интегральную составляющую до стабилизации положения СМ. Если текущее положение СМ соответствует заданному и колебания СМ отсутствуют в течение 5 с (может быть задано другое время выдержки), то ПК записывает накопленную интегральную составляющую в элемент массива, соответствующий смещению нуля ОЗ для текущего положения СМ. После этого ПК принимает решение о переходе в следующую точку позиционирования, к заданной координате позиционирования СМ добавляется 1 мм. Интегральную составляющую вычисляют по формуле где- накопленная интегральная составляющая,Error - ошибка по регулируемому параметру в относительных единицах, вычисляемая как разность заданного и текущего положений сервомоторов в абсолютных единицах, отнеснная к диапазону перемещений сервомотора,Tu - коэффициент усиления интегральной составляющей, который на данном этапе является постоянной величиной и подобран так, чтобы обеспечить высокую точность позиционирования СМ. Tu = 0,07. Таким образом формируют массив для корекции смещений нуля ОЗ. Для СМ с диапазоном регулирования от 0 до 320 мм массив состоит из 320 элементов. Значения, составляющие этот массив, отражают влияние регулирующих клапанов и установленных-3 013903 на них пружин на смещение нуля ОЗ. Значения элементов этого массива отражают реальные характеристики СМ. Смещение нуля ОЗ может быть неравномерным во всм диапазоне перемещений СМ. Полученный на этом этапе массив далее используют при вычислении динамической коррекции смещения нуля ОЗ. В САР, выполненной с резервированием канала управления, измерение смещений ОЗ выполняют для каждого канала управления отдельно и для каждого канала отдельно формируют массив значений интегральной составляющей смещения нуля ОЗ. В САР, выполненной с несколькими СМ, измерение смещений нуля ОЗ выполняют отдельно для каждого СМ и для каждого СМ отдельно формируют массив значений интегральной составляющей смещения нуля ОЗ. Следующий этап стабилизации ОЗ выполняют при включнном генераторе, когда пар податся в турбину. В этом случае смещение нуля происходит из-за усилий, создаваемых паром на клапана, люфтов в электромеханическом преобразователе, изменения давления масла в линии сервомотора. Чтобы скомпенсировать эти усилия, в контур позиционирования СМ вводят интегральную составляющую с переменным коэффициентом усиления. Динамическую коррекцию смещения нуля ОЗ вычисляют по формуле- динамическая коррекция нуля ОЗ,- коррекция смещения нуля ОЗ для текущего положения СМ из сформированного на предыдущем этапе массива,- текущее положение СМ в относительных единицах,где- заданное положение СМ в относительных единицах,Tu - переменный коэффициент усиления интегральной составляющей. Tu принимает следующие значения: Вычисленную по указанной формуле динамическую коррекцию нуля ОЗ учитывают при определении смещения ОЗ, требуемого для достижения заданного положения СМ, исходя из текущего положения СМ. Смещение ОЗ определяют по формуле:- динамическая коррекция нуля ОЗ вычисленния по формуле (2),kp - пропорциональный коэффициент усиления регулятора, определяется исходя из характеристик Величина требуемого смещения ОЗ, вычисленная программируемым контроллером ПК в контуре позиционирования СМ, поступает в качестве управляющего воздействия в контур позиционирования ОЗ. Предлагаемый способ регулирования положения ОЗ делает САР инвариантной к состоянию гидравлических исполнительных устройств, что позволяет обеспечить устойчивость сервомоторов без рассмотрения их реальных силовых характеристик. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ регулирования положения отсечного золотника, управляющего перемещением сервомотора, в свою очередь управляющего клапанами паровой турбины в системе регулирования паровой турбины, с динамической коррекцией смещения нуля отсечного золотника, включающий определение требуемой величины перемещения отсечного золотника для достижения заданного положения сервомотора и перемещение отсечного золотника в соответствии с ранее определенным значением,отличающийся тем, что на этапе определения величины перемещения отсечного золотника до начала регулирования измеряют значения смещения нуля отсечного золотника в различных положениях штока сервомотора во всем диапазоне перемещения этого штока; а при регулировании производят расчет величины динамической коррекции смещения нуля для заданного положения штока сервомотора с учетом смещения нуля, измеренного для текущего положения штока сервомотора, и-4 013903 величину перемещения отсечного золотника осуществляют в соответствии с рассчитанной величиной динамической коррекции смещения нуля. 2. Способ по п.1, отличающийся тем, что для регулирования положения отсечного золотника применяют электромеханический преобразователь, шток которого жестко соединен со штоком отсечного золотника, образуя единое звено регулирования. 3. Способ по п.1, отличающийся тем, что при ручном измерении смещения нуля отсечного золотника принудительно позиционируют сервомотор последовательно в несколько положений и для каждого положения штока сервомотора определяют смещение нуля отсечного золотника по индикации соответствующих датчиков положения. 4. Способ по п.1, отличающийся тем, что при измерении смещения нуля отсечного золотника с применением программируемого контроллера позиционируют сервомотор последовательно в несколько положений с заданным шагом, указанный программируемый контроллер регистрирует показания датчика положения, расположенного на штоке сервомотора, при наличии колебаний сервомотора измеряет интегральную составляющую соответствующих колебаний отсечного золотника до стабилизации сервомотора и регистрирует смещение нуля отсечного золотника с учетом этой интегральной составляющей. 5. Способ по п.1, отличающийся тем, что в системе автоматического регулирования с резервированием, содержащей более одного канала управления, измерение смещений нуля отсечного золотника выполняют отдельно для каждого канала. 6. Способ по п.1, отличающийся тем, что в системе автоматического регулирования, содержащей более одного сервомотора, измерение смещений нуля отсечного золотника выполняют отдельно для каждого сервомотора.
МПК / Метки
МПК: F15B 13/00, F01D 17/20
Метки: паровой, динамической, отсечного, положения, нуля, золотника, регулирования, применяемый, турбины, коррекцией, способ, системе
Код ссылки
<a href="https://eas.patents.su/6-13903-sposob-regulirovaniya-polozheniya-otsechnogo-zolotnika-s-dinamicheskojj-korrekciejj-polozheniya-nulya-primenyaemyjj-v-sisteme-regulirovaniya-parovojj-turbiny.html" rel="bookmark" title="База патентов Евразийского Союза">Способ регулирования положения отсечного золотника с динамической коррекцией положения “нуля”, применяемый в системе регулирования паровой турбины</a>
Способ и устройство для регулирования скорости паровой турбины
Номер патента: 5895
Опубликовано: 30.06.2005
Авторы: Волынский Михайло, Дроб Дмитрий, Старосельский Наум
МПК: F01D 17/26, F01D 17/06, F01D 17/04...
Метки: паровой, регулирования, устройство, турбины, способ, скорости
Формула / Реферат:
1. Способ регулирования расхода пара через паровую турбину с использованием системы регулирования, содержащей регулятор скорости паровой турбины для создания уставки привода парового клапана, управляющий клапан, направляющий поток рабочей текучей среды в привод парового клапана и из него, датчик, передающий сигнал, пропорциональный положению привода парового клапана, и дополнительный регулятор положения управляющего клапана, включающий (a)...
Ступень давления паровой / газовой турбины c универсальным бандажом
Номер патента: 8156
Опубликовано: 27.04.2007
Авторы: Зитин Владлен, Налётов Олег
МПК: F01D 5/18
Метки: бандажом, газовой, давления, турбины, ступень, паровой, универсальным
Формула / Реферат:
1. Гидравлическая осевая машина, работающая на пару или газе, включающая стационарный корпус; ротор, имеющий внутренний диск, наружный бандаж и множество лопаток, смонтированных между названным диском и названным бандажом; по крайней мере на части названного бандажа выполнено множество сквозных отверстий так, чтобы пар или газ проходили радиально наружу через названные отверстия для предотвращения формирования оксидов металла и солей на...
Комплекс динамической защиты военной техники. комплекс динамической защиты башни.
Номер патента: 3291
Опубликовано: 24.04.2003
Авторы: Кимаев Алексей Михайлович, Тумасов Владимир Дмитриевич, Рототаев Дмитрий Александрович, Молодняков Николай Александрович, Хейфиц Григорий Адольфович, Михайленко Евгений Иванович, Егоров Александр Иванович, Дорохов Николай Сергеевич, Васильев Вячеслав Иванович, Алексеев Михаил Олегович, Илюнин Сергей Владимирович, Чубаров Владимир Давидович, Григорян Валерий Арменакович, Аникина Лидия Николаевна
МПК: F41H 5/007
Метки: защиты, военной, комплекс, башни, динамической, техники
Формула / Реферат:
1. Комплекс динамической защиты военной техники, включающий защиту башни и корпуса, отличающийся тем, что в нем защита башни и корпуса выполнена в виде модулей, при этом модуль корпуса может быть выполнен унифицированным в виде единого узла, состоящего из продольных несущих лонжеронов и поперечных ребер толщиной 0-100 мм, жестко соединенных между собой, образующих секции, в которые могут быть установлены (закреплены) защитные блоки. 2. Комплекс...
Способ и устройство для динамической коррекции толщины металлической ленты или полосы
Номер патента: 6530
Опубликовано: 24.02.2006
Авторы: Пампель Михаэль, Йойде Манфред, Пампель Гюнтер
МПК: B21B 37/18
Метки: динамической, способ, коррекции, устройство, толщины, полосы, ленты, металлической
Формула / Реферат:
1. Способ коррекции толщины металлической ленты или полосы при ее прокатке в прокатной клети, оснащенной исполнительными элементами для регулирования толщины металлической ленты или полосы, с последующей намоткой металлической ленты или полосы по меньшей мере на одну моталку, при осуществлении которого на основе результатов по меньшей мере одного измерения длины металлической ленты или полосы и результатов измерения соответствующего числа...
Способ корректировки положения пути и путевая машина
Номер патента: 13437
Опубликовано: 30.04.2010
Авторы: Лихтбергер Бернхард, Матзингер Эрвин, Тойрер Йозеф
МПК: E01B 27/20, E01B 27/17
Метки: пути, положения, машина, способ, путевая, корректировки
Формула / Реферат:
1. Способ корректировки положения пути, при котором покоящийся на щебеночном балласте, содержащий шпалы (6) путь (8) подбивают, подняв во временное заданное положение, а затем в рамках стабилизации пути опускают контролируемым образом в окончательное заданное положение, приложив действующую в вертикальном направлении нагрузку в сочетании с колебаниями, причем посредством вращающейся цилиндрической подметальной щетки (14) распределяют находящийся...
Предыдущий патент: Подводная система для добычи нефти и/или газа
Следующий патент: Пиридо- и пиримидопиримидиновые производные в качестве антипролиферативных агентов
Случайный патент: Способ и устройство для измерения расхода текучей среды