Способ подъёма-складывания антенно-мачтовой системы и гидромеханическое устройство для его реализации
Номер патента: 4729
Опубликовано: 26.08.2004
Авторы: Гончарук Игорь Анатольевич, Полынкин Юрий Анатольевич, Ковиков Евгений Петрович, Вищук Виктор Адамович, Зыль Николай Антонович, Ботеновский Сергей Леонидович, Кубасов Михаил Николаевич, Волчков Владимир Александрович, Бабарыкин Евгений Александрович
Формула / Реферат
1. Способ подъема-складывания антенно-мачтовой системы, заключающийся в перемещении фермы антенно-мачтовой системы РЛС в вертикальной плоскости из транспортного положения в рабочее и обратно с использованием гидромеханического устройства, отличающийся тем, что перемещение фермы антенно-мачтовой системы в вертикальной плоскости относительно горизонтальной оси вращения обеспечивается четырехзвенным рычажным механизмом поворота фермы, состоящим из спаренной диады, внутренний рычаг которой соединен с основанием фермы, наружный рычаг соединен с поворачиваемой фермой, шарнир диады соединен со штоками обоих гидроцилиндров, причем сами гидроцилиндры установлены на платформе шарнирно, соединены гидрокоммуникациями для сообщения полостей гидроцилиндров между собой, с управляемым источником давления и с общим сливным коллектором.
2. Гидромеханическое устройство подъема-складывания антенно-мачтовой системы, содержащее два гидроцилиндра, соединенных гидрокоммуникациями для сообщения полостей гидроцилиндров между собой, с управляемым источником давления и с общим сливным коллектором, шарнирно установленных своими основаниями на металлической платформе, размещаемой на подвижном шасси, жестко связанной с основанием перемещаемой фермы, при этом площади сечений одноименных полостей обоих гидроцилиндров равны, отличающееся тем, что устройство снабжено четырехзвенным рычажным механизмом поворота фермы, состоящим из спаренной диады, кинематически связанным со штоками обоих гидроцилиндров, при этом шток каждого из гидроцилиндров через центральную ось (шарнир диады) связан с одним из концов каждого наружного рычага и с одним из концов каждого внутреннего рычага четырехзвенного рычажного механизма, каждый наружный рычаг другим своим концом через ось наружных рычагов связан с основанием перемещаемой в вертикальной плоскости относительно оси вращения фермы антенно-мачтовой системы, каждый внутренний рычаг другим своим концом через ось внутренних рычагов связан с перемещаемой в вертикальной плоскости относительно оси вращения фермой, а внутренние рычаги жестко соединены между собой.

Текст
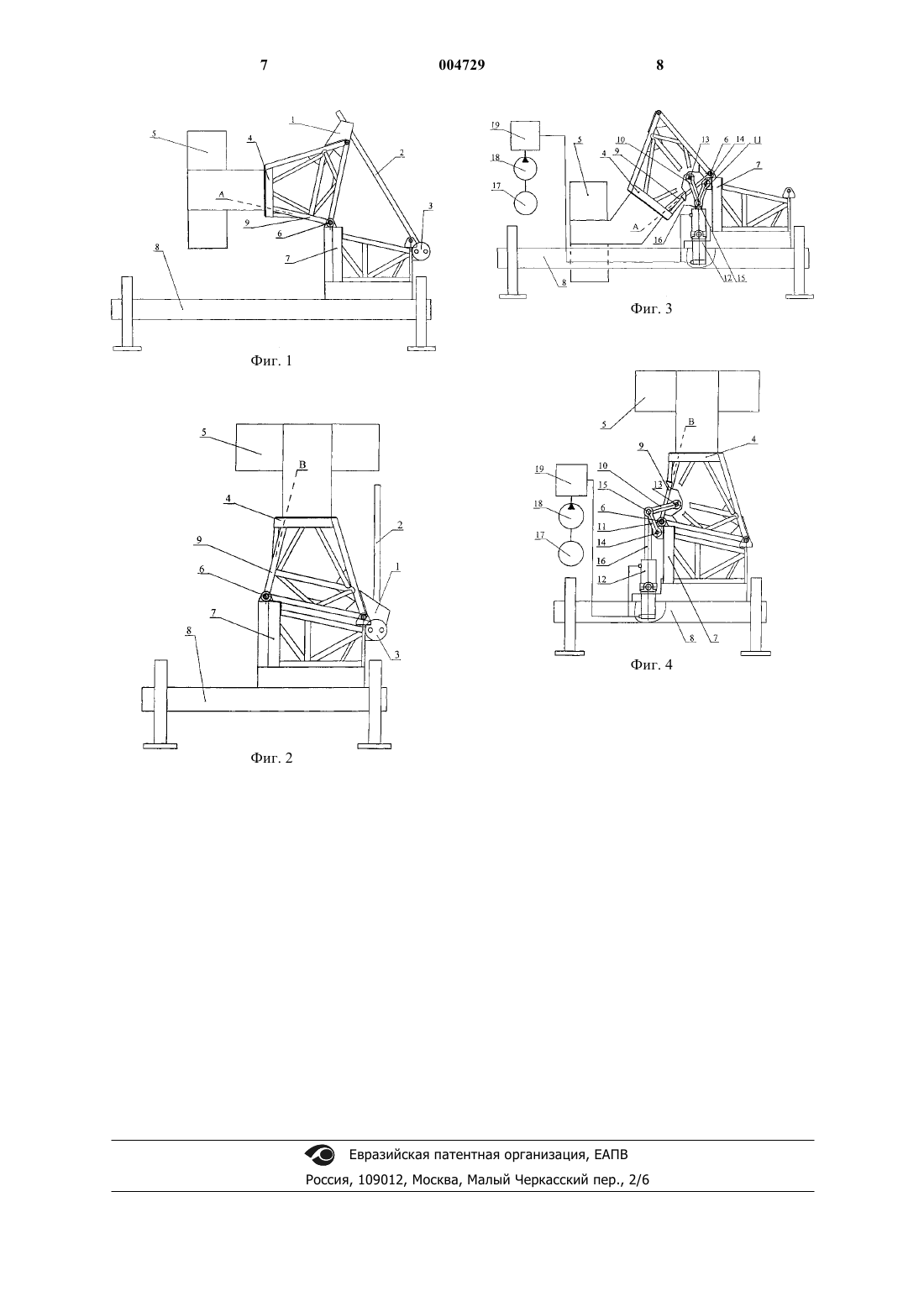
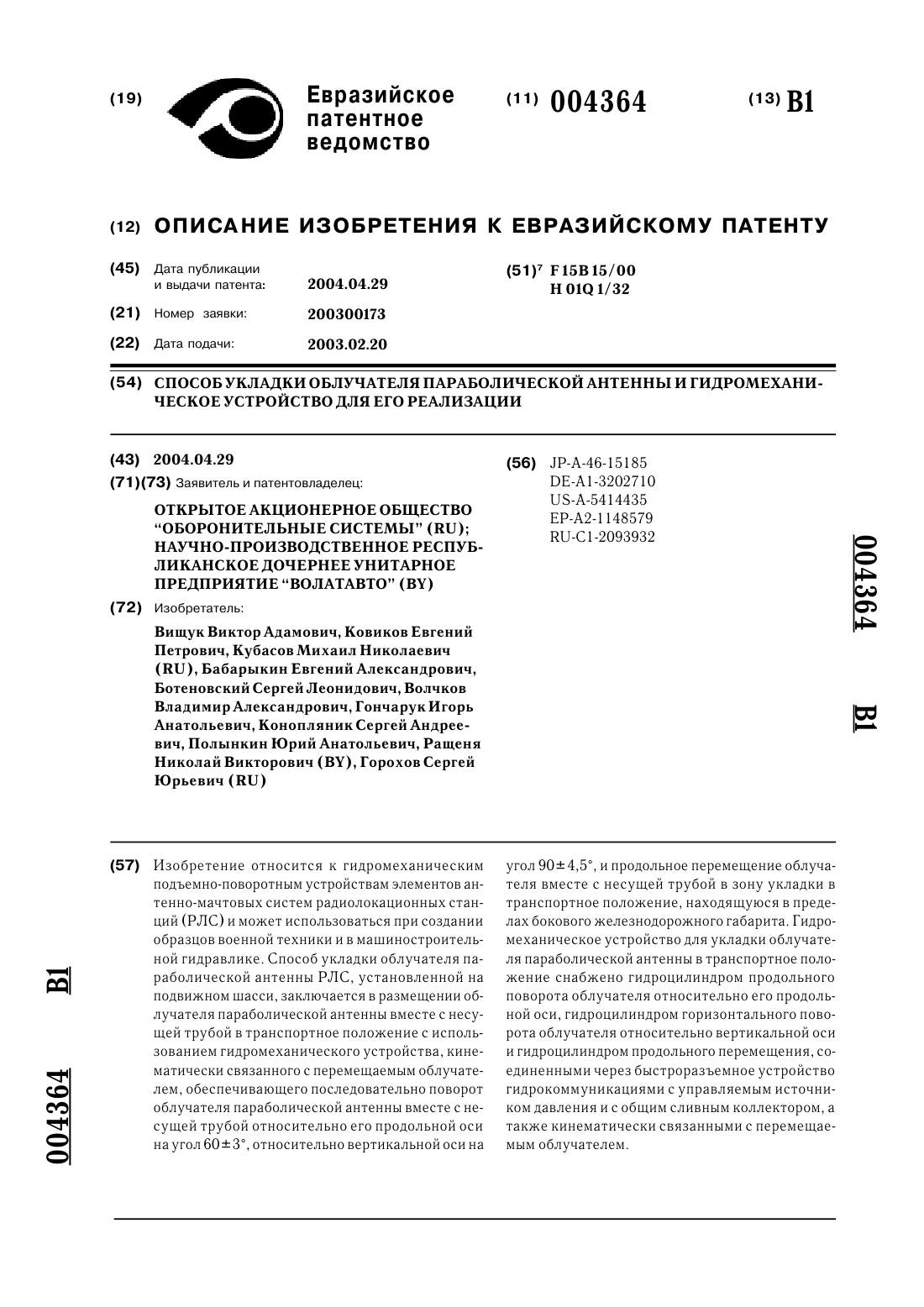
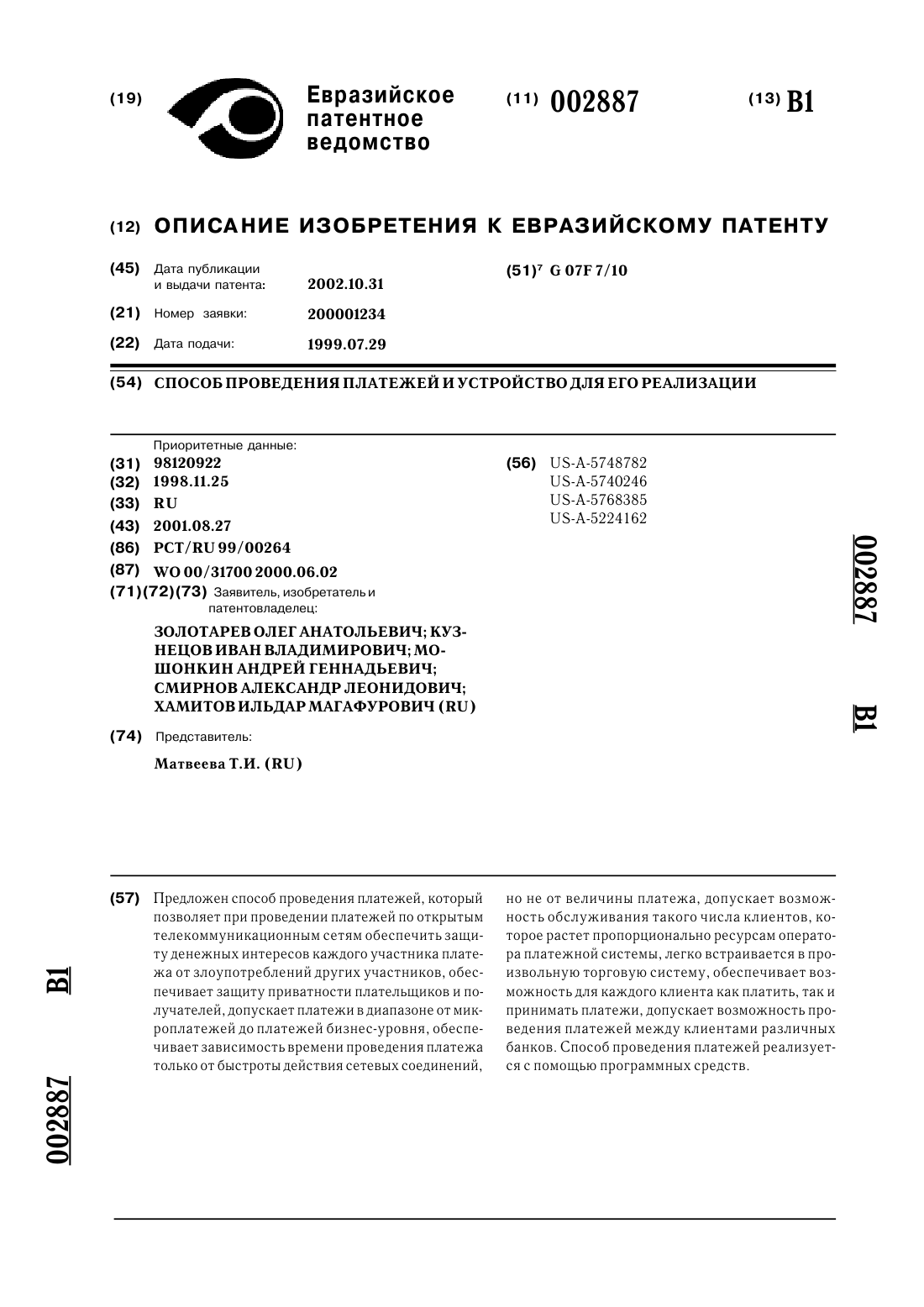
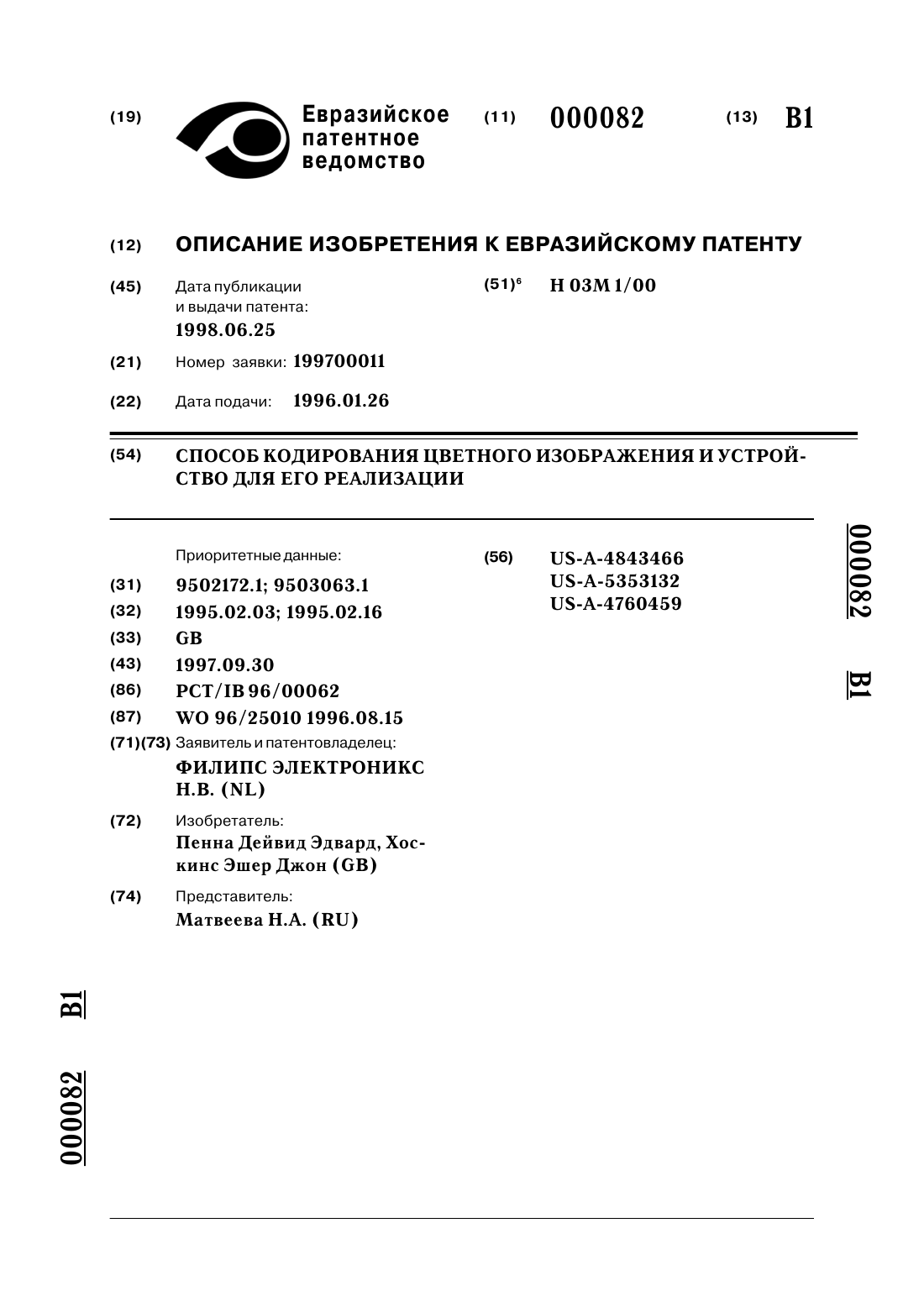
1 Изобретение относится к гидромеханическим подъемно-поворотным устройствам антенно-мачтовых систем радиолокационных станций, а также других мачтовых конструкций,и может использоваться при создании образцов военной техники и в машиностроительной гидравлике. Известны способы подъема антенномачтовых систем радиолокационных станций(РЛС) на заданную рабочую высоту, определяемую высотой мачтовой конструкции. К таковым способам можно отнести следующие: сборка мачтового устройства для размещения антенной системы РЛС, состоящего из отдельных металлоконструкций [Дружинин В.В. Радиотехнические войска противовоздушной обороны страны. - М.: ДОСААФ, 1968; Пересада С.А. Зенитные ракетные комплексы. - М.: Воениздат,1973]. Данный способ преимущественно применяется для создания стационарных мачтовых конструкций, обладает значительной трудоeмкостью и требует использования отдельных грузоподъемных устройств или механизмов; подъем из транспортного положения в рабочее цельной мачтовой конструкции, размещенной в том числе и на подвижном шасси, с помощью гидравлического цилиндра (одного или двух синхронно работающих), основание которого, как правило, устанавливается от основания поднимаемой мачтовой конструкции на расстоянии, не меньшем половины ее высоты, а верхняя часть штока гидроцилиндра закрепляется, как правило, вблизи центра тяжести этой мачтовой конструкции [RU 2158220, приоритет от 27.07.1999 г.; RU 2095523, приоритет от 09.03.1995 г.; RU 2155680, приоритет от 09.07.1999 г.]. Основными недостатками данного способа являются значительные габаритные размеры в транспортном положении, обусловленные как размерами цельной мачтовой конструкции, так и большими размерами гидроцилиндра (из-за необходимости обеспечения большого рабочего хода штока гидроцилиндра). Известен способ перемещения (путем поворота в вертикальной плоскости относительно оси вращения при раскладывании или складывании мачтовой конструкции антенной системы) форменной конструкции антенной системы,реализованный в антенном посту зенитного ракетного комплекса С-125 и его модификаций[Зенитный ракетный комплекс С-125. Техническое описание. 1980; Модернизация ЗРК Волга и Печора//Каталог Оружие России-2000. М.: Военный парад, 2000; Мобильный зенитный ракетный комплекс, антенный пост, оптикоэлектронная система, комплекс радиотехнической защиты. Заявка ЕА 200200458, приоритет от 12.02.2002 г.]. Этот способ предназначен для перевода из транспортного положения в рабочее (и обратно) двух соединенных через ось вращения составных частей антенно-мачтовой системы антенно 004729 2 го поста и основан на использовании винтового механизма для поворачивания верхней части составной фермы в вертикальной плоскости относительно оси вращения (фиг. 1 - транспортное положение, фиг. 2 - рабочее положение). Тянущим (толкающим) элементом является гайка 1, перемещаемая по вращающемуся ходовому винту 2. При вращении ходового винта 2,осуществляемом вручную через двухступенчатый цилиндрический редуктор 3, ферма 4 с размещенной на ее верхнем конце антенной системой 5 переводится из транспортного (горизонтального) положения в рабочее (вертикальное) положение путем поворота в вертикальной плоскости относительно оси вращения 6 до своего соприкосновения с основанием 7 фермы 4,жестко закрепленным на платформе 8, размещаемой на буксируемом шасси. При этом величина угла поворота (складывания) фермы 4 измеряется по ходу часовой стрелки от линии А(фиг. 1), определяющей положение передней несущей стойки 9 фермы 4 в исходном (транспортном) положении антенной системы 5, до линии В (фиг. 2), определяющей конечное положение передней несущей стойки 9 фермы 4 в рабочем (вертикальном) положении антенной системы 5, и находится в интервале от 0 до 90. Наиболее существенными недостатками данного способа (и устройств для его реализации) являются значительные временные затраты, обусловленные использованием преимущественно ручного труда при переводе антенной системы антенного поста из транспортного положения в рабочее (и обратно), невозможность обеспечить необходимые угловые скорости перемещения (поворота) фермы, а также необходимость размещения составных частей антенномачтовой конструкции на двух транспортных единицах. Кроме того, диапазон угла поворота(складывания) составных частей антенномачтовой системы не превышает 90. Задачей изобретения и достигаемыми техническими результатами являются сокращение времени перевода антенно-мачтовой системы РЛС из транспортного положения в рабочее (и обратно), исключение ручного труда при переводе антенно-мачтовой системы РЛС из транспортного положения в рабочее (и обратно), а также увеличение диапазона рабочих углов поворота (складывания) составных частей антенно-мачтовой системы. Поставленная задача решается, а заявленные технические результаты достигаются тем,что из состава подобных систем исключается винтовой механизм и вместо него вводится гидромеханическое устройство. Использование гидромеханического устройства позволяет в 2530 раз сократить время перевода антенно-мачовой системы РЛС из транспортного положения в рабочее (и обратно), исключить затраты ручного труда при переводе антенно-мачтовой системы РЛС из транспортного положения в рабо 3 чее (и обратно). При этом применение используемых при реализации заявляемого способа конструктивных решений (в том числе гидроцилиндров с малой длиной штока, а также оригинального рычажного механизма) обеспечивает увеличение диапазона рабочих углов поворота (складывания) фермы до 150-160. На момент подачи заявки на способ авторами не обнаружено устройство, реализующее данный способ. Заявляемое гидромеханическое устройство перевода антенно-мачтовой системы РЛС из транспортного положения (фиг. 3, вид сбоку) в рабочее положение (фиг. 4, вид сбоку) состоит из двух основных частей - гидромеханического привода и гидросистемы, размещаемых на подвижном шасси, преимущественно на автомобильном, и работает следующим образом. В исходном (транспортном) положении(фиг. 3) ферма 4 с размещенной на ее верхнем конце антенной системой 5 находится в крайнем нижнем положении, при этом ферма 4 через ось вращения 6 связана с основанием 7 фермы 4,жестко закрепленным на платформе 8, размещаемой на подвижном шасси, преимущественно на автомобильном (не показано). Основание 7 фермы 4 предназначено для размещения и фиксации фермы 4, на верхнем конце которой размещена антенная система 5, в рабочем (вертикальном) положении. Ферма 4 является несущим элементом антенной системы 5 и предназначена для размещения на ней узлов и блоков радиоэлектронных трактов РЛС. Гидромеханический привод поворота фермы представляет собой гидромеханическую систему, предназначенную для осуществления перевода антенно-мачтовой системы РЛС из транспортного положения в рабочее (и обратно) по заданной кинематической траектории с требуемой угловой скоростью. Он включает в себя четырехзвенный рычажный механизм поворота фермы, выполненный в виде спаренной диады(10, 11) с двумя внутренними рычагами (звеньями) 10 и двумя наружными рычагами (звеньями) 11, кинематически связанный с двумя синхронно работающими гидроцилиндрами 12 (с малой длиной штока), приводящими в движение этот механизм. Четырехзвенный рычажный механизм поворота фермы, выполненный в виде спаренной диады, предназначен для преобразования поступательного движения штоков каждого из двух синхронно работающих гидроцилиндров 12 во вращательное (круговое) движение фермы 4. Четырехзвенный рычажный механизм поворота фермы (спаренная диада) состоит из двух внутренних рычагов (звеньев) 10, кинематически связанных одним своим концом с фермой 4 через ось внутренних рычагов 13, двух наружных рычагов (звеньев) 11, кинематически связанных одним своим концом с основанием 7 фермы 4 через ось наружных рычагов 14, и цен 004729 4 тральной оси (шарнира диады) 15, связывающей четырехзвенный рычажный механизм поворота фермы (спаренную диаду) через другие концы двух внутренних рычагов (звеньев) 10 и двух наружных рычагов (звеньев) 11 со штоками 16 обоих гидроцилиндров 12, установленных на платформе 8 шарнирно. Внутренние рычаги 10 механически соединены между собой распорной трубой с приваренной коробчатой вставкой,придающей четырехзвенному рычажному механизму поворота фермы дополнительную жесткость. Внутренние рычаги 10 и наружные рычаги 11 изготовлены из цельного листа низколегированной стали. В рычагах имеются отверстия с установленными в них шарнирными подшипниками типа ШСЛ-90. За счет сферического внутреннего кольца подшипник позволяет компенсировать погрешность в сборке и работе механизма. От перемещений подшипники предохраняются установленными в канавки стопорными кольцами. Распорная труба имеет с двух сторон расточки, в которые запрессованы бронзовые втулки, предназначенные для центрирования оси. В отверстия наружных рычагов 11 также запрессованы бронзовые втулки, обеспечивающие координацию положения наружных рычагов 11 на центральной оси 15. Передача движения (усилия) от штоков 16 гидроцилиндров 12 на внутренние рычаги 10 и наружные рычаги 11 осуществляется через центральную ось 15. Центральная ось 15 цельная,изготовлена из цилиндрического низколегированного сортамента, имеет малую величину шероховатости поверхности. На одном торце центральной оси 15 имеется буртик, на другом нарезана резьба для стягивания и фиксации соответствующих элементов четырехзвенного рычажного механизма поворота фермы корончатой гайкой (не показано). Центральная ось 15 для данного узла является базовой деталью при сборке и проходит насквозь через бронзовые втулки наружных рычагов 11 и распорную трубу. Гидравлические цилиндры 12 перемещения фермы 4 предназначены для плоскопараллельного перемещения внутренних рычагов 10 и наружных рычагов 11 четырехзвенного рычажного механизма поворота фермы с необходимым усилием и требуемой для поворота фермы 4 скоростью. Каждый гидроцилиндр 12 состоит из гильзы, штока, поршня, двух крышек и уплотнений,при этом каждый гидроцилиндр 12 установлен цапфами в опорах, приваренных к платформе 8. В опорах имеются смазочные каналы, позволяющие прошприцовывать сопряжение цилиндрических поверхностей цапф и отверстий опор консистентной смазкой через пресс-масленки. В проушины штоков 16 гидроцилиндров 12 установлены шарнирные подшипники типа ШСЛ 90, позволяющие компенсировать погрешность монтажа гидроцилиндров 12 и центральной оси 5 15, проходящей через сферические кольца подшипников. Для обеспечения синхронной работы гидроцилиндров 12 их полости между собой запараллелены трубопроводами. Подвод рабочей жидкости к гидроцилиндрам 12 осуществляется по гидрокоммуникациям от соответствующих секций гидросистемы. Основными элементами гидросистемы являются гидробаки, соединенные коллекторами, силовая установка, включающая электродвигатель 17 и гидронасос 18,выполненный в виде аксиально-поршневой гидромашины, блок гидрораспределителей 19 с управлением от электронного блока управления,а также гидрокоммуникации. При подаче напряжения на электродвигатель 17 его ротор начинает вращаться и приводит в движение рабочие элементы гидронасоса 18, создающего давление в гидросистеме. Давление через рабочую жидкость гидросистемы подается в блок гидрораспределителей 19 и далее - в полость гидроцилиндров 12, обеспечивая выдвижение (из исходного положения) штоков 16 гидроцилиндров 12. Штоки 16 гидроцилиндров 12 через центральную ось 15 воздействуют на внутренние рычаги 10 и наружные рычаги 11 четырехзвенного рычажного механизма поворота фермы ипреобразуют поступательное движение штоков 16 каждого из двух синхронно работающих гидроцилиндров 12 во вращательное (круговое) движение фермы 4 вокруг оси вращения 6, обеспечивая тем самым достижение фермой 4 своего рабочего положения (фиг. 4). После достижения фермой 4 своего вертикального положения она фиксируется на основании 7 с помощью гидрозамков (не показаны). Перевод антенно-мачтовой системы РЛС из рабочего положения в транспортное осуществляется в обратной последовательности. Управление работой гидромеханического устройства осуществляется с помощью электронного блока управления, обеспечивающего возможность автоматического, полуавтоматического или ручного режимов перевода антенномачтовой системы РЛС из транспортного положения в рабочее (и обратно). Для контроля над процессом перевода антенно-мачтовой системы РЛС из транспортного положения в рабочее (и обратно) в гидромеханическом устройстве предусмотрены датчик угла поворота фермы и концевые выключатели. Заложенные в систему конструктивные решения позволили исключить применение ручного труда, существенно увеличить угловую скорость перемещения (поворота) фермы, а также увеличить диапазон рабочих углов при 6 складывании-раскладывании фермы с размещенной на ней антенно-мачтовой системой. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ подъема-складывания антенномачтовой системы, заключающийся в перемещении фермы антенно-мачтовой системы РЛС в вертикальной плоскости из транспортного положения в рабочее и обратно с использованием гидромеханического устройства, отличающийся тем, что перемещение фермы антенно-мачтовой системы в вертикальной плоскости относительно горизонтальной оси вращения обеспечивается четырехзвенным рычажным механизмом поворота фермы, состоящим из спаренной диады,внутренний рычаг которой соединен с основанием фермы, наружный рычаг соединен с поворачиваемой фермой, шарнир диады соединен со штоками обоих гидроцилиндров, причем сами гидроцилиндры установлены на платформе шарнирно, соединены гидрокоммуникациями для сообщения полостей гидроцилиндров между собой, с управляемым источником давления и с общим сливным коллектором. 2. Гидромеханическое устройство подъема-складывания антенно-мачтовой системы,содержащее два гидроцилиндра, соединенных гидрокоммуникациями для сообщения полостей гидроцилиндров между собой, с управляемым источником давления и с общим сливным коллектором, шарнирно установленных своими основаниями на металлической платформе, размещаемой на подвижном шасси, жестко связанной с основанием перемещаемой фермы, при этом площади сечений одноименных полостей обоих гидроцилиндров равны, отличающееся тем, что устройство снабжено четырехзвенным рычажным механизмом поворота фермы, состоящим из спаренной диады, кинематически связанным со штоками обоих гидроцилиндров,при этом шток каждого из гидроцилиндров через центральную ось (шарнир диады) связан с одним из концов каждого наружного рычага и с одним из концов каждого внутреннего рычага четырехзвенного рычажного механизма, каждый наружный рычаг другим своим концом через ось наружных рычагов связан с основанием перемещаемой в вертикальной плоскости относительно оси вращения фермы антенномачтовой системы, каждый внутренний рычаг другим своим концом через ось внутренних рычагов связан с перемещаемой в вертикальной плоскости относительно оси вращения фермой,а внутренние рычаги жестко соединены между собой.
МПК / Метки
МПК: F15B 15/00, E04H 12/34, H01Q 1/32
Метки: системы, устройство, антенно-мачтовой, способ, реализации, подъёма-складывания, гидромеханическое
Код ссылки
<a href="https://eas.patents.su/5-4729-sposob-podyoma-skladyvaniya-antenno-machtovojj-sistemy-i-gidromehanicheskoe-ustrojjstvo-dlya-ego-realizacii.html" rel="bookmark" title="База патентов Евразийского Союза">Способ подъёма-складывания антенно-мачтовой системы и гидромеханическое устройство для его реализации</a>
Способ укладки облучателя параболической антенны и гидромеханическое устройство для его реализации
Номер патента: 4364
Опубликовано: 29.04.2004
Авторы: Вищук Виктор Адамович, Ращеня Николай Викторович, Волчков Владимир Александрович, Конопляник Сергей Андреевич, Гончарук Игорь Анатольевич, Ковиков Евгений Петрович, Бабарыкин Евгений Александрович, Кубасов Михаил Николаевич, Горохов Сергей Юрьевич, Ботеновский Сергей Леонидович, Полынкин Юрий Анатольевич
МПК: H01Q 1/32, F15B 15/00
Метки: укладки, гидромеханическое, антенны, облучателя, реализации, параболической, способ, устройство
Формула / Реферат:
1. Способ укладки облучателя параболической антенны радиолокационной станции, размещаемой на подвижном шасси, заключающийся в размещении облучателя параболической антенны в транспортное положение, отличающийся тем, что укладка облучателя параболической антенны вместе с несущей трубой в транспортное положение выполняется путем перемещения с вращением облучателя параболической антенны в трех плоскостях относительно плоскости рефлектора...
Способ проведения платежей и устройство для его реализации
Номер патента: 2887
Опубликовано: 31.10.2002
Авторы: Мошонкин Андрей Геннадьевич, Смирнов Александр Леонидович, Хамитов Ильдар Магафурович, Кузнецов Иван Владимирович, Золотарёв Олег Анатольевич
МПК: G07F 7/10
Метки: способ, платежей, устройство, реализации, проведения
Формула / Реферат:
1. Способ проведения платежей, заключающийся в проведении пополнения платежного устройства посредством операции первичного наполнения платежного сертификата, при которой в платежном устройстве создают основу платежного сертификата и получают подпись платежного сертификата посредством изготовления вслепую денежной подписи оператора, проведении операции открытия счета получателя платежа, проведении платежной операции, при которой подпись и...
Способ кодирования цветного изображения и устройство для его реализации
Номер патента: 82
Опубликовано: 25.06.1998
Авторы: Пенна Дейвид Эдвард, Хоскинс Эшер Джог
МПК: H03M 1/00
Метки: устройство, изображения, способ, цветного, кодирования, реализации
Формула / Реферат:
1. Способ формирования кодированного сигнала видеоизображения, при котором осуществляют кодирование значений цвета элементов изображения последовательности кадров цифрового видеоизображения, отличающийся тем, что для каждого кадра каждому разному цвету в данном изображении присваивают значение цвета, выявляют преобладающий цвет из числа разных цветов для кадра изображения, отрезки, по меньшей мере, двух последовательных элементов изображения...
Способ отделения твердых частиц от газов и устройство для реализации указанного способа
Номер патента: 3446
Опубликовано: 26.06.2003
Автор: Хилтунен Йрки
МПК: B01D 45/12, B04C 5/28, C10G 11/18...
Метки: газов, способ, отделения, твердых, устройство, указанного, реализации, способа, частиц
Формула / Реферат:
1. Способ отделения частиц от газового потока, включающий пропускание газового потока, содержащего взвешенные частицы, в сепараторное устройство, которое включает, по меньшей мере, два мультициклона (16A-16C, 31A-31E) с несколькими входами, где частицы отделяются от газа под действием центробежной силы, отличающийся тем, что используют сепараторное устройство, в котором циклоны с несколькими входами содержат прямолинейные направляющие лопасти,...
Устройство для спуска и подъема сейсмоприемной косы для использования на суднах сейсмической разведки
Номер патента: 2251
Опубликовано: 28.02.2002
Автор: Вилльямсон Марк Ричард
МПК: B63B 35/00
Метки: сейсмоприемной, суднах, разведки, устройство, косы, использования, спуска, подъема, сейсмической
Формула / Реферат:
1. Устройство для спуска и подъема сейсмоприемной косы для использования на судне сейсмической разведки, содержащее, балку, средство для закрепления балки в продольном направлении судна выше нормальной габаритной высоты над палубой для сейсмоприемных кос судна, содержащее шарнирное соединение с самым кормовым концом балки, обеспечивающее возможность поворота конца вокруг горизонтальной осевой линии, проходящей поперек балки, и удлиняемое опорное...
Предыдущий патент: Рамный корпус установки для подготовки воздуха
Следующий патент: Рабочая цепь щебнеочистительной машины
Случайный патент: Стальной корд с одинарной скруткой для армирования эластомеров