Устройство управления электроприводами экскаватора
Номер патента: 12259
Опубликовано: 28.08.2009
Формула / Реферат
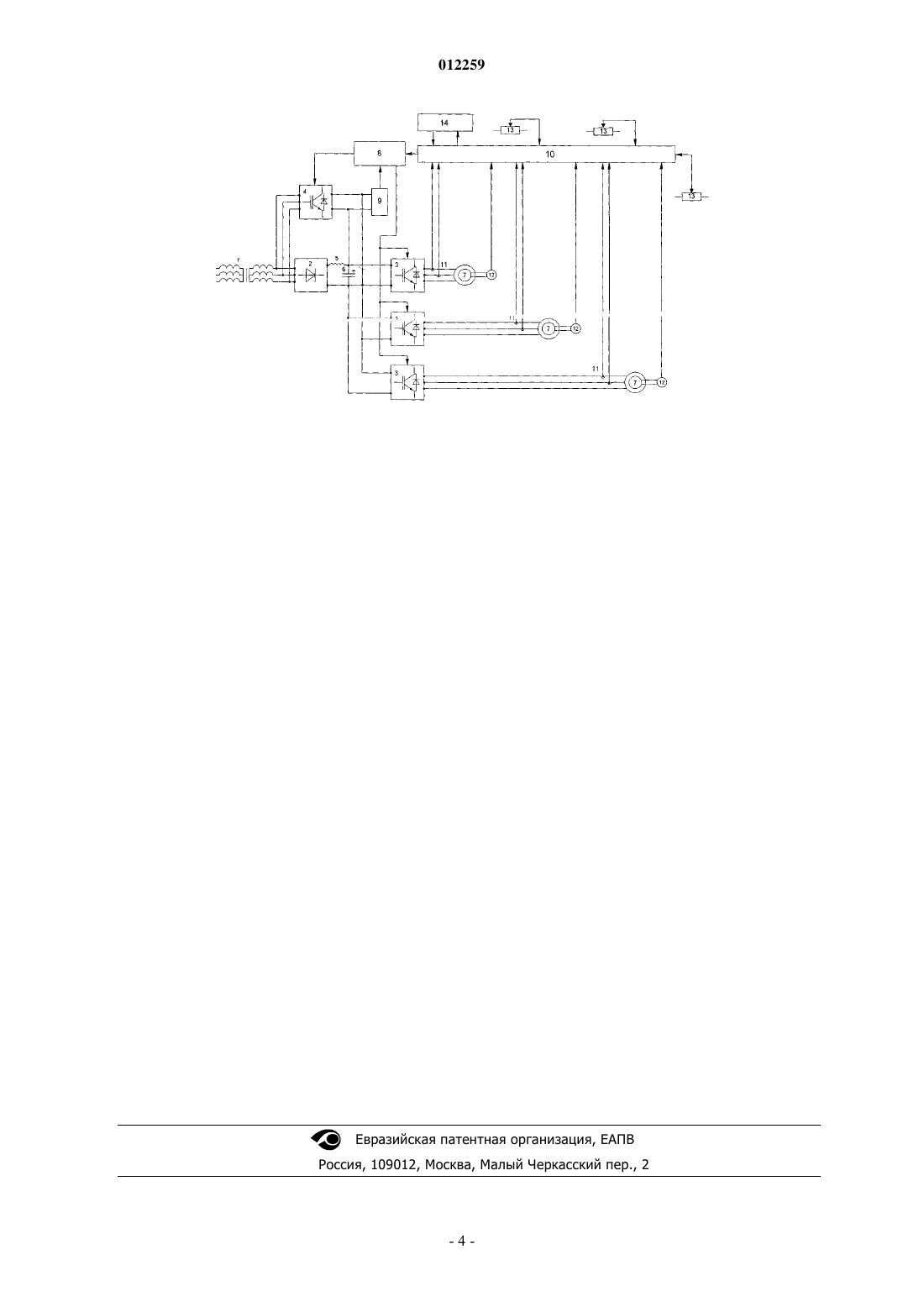
Устройство управления электроприводами экскаватора, содержащее силовую часть, блок управления силовой частью и блок управления системой электроприводов экскаватора, отличающееся тем, что силовая часть включает понижающий трансформатор 1, трехфазный мостовой выпрямитель 2, по меньшей мере три автономных инвертора 3 напряжения и ведомый сетью инвертор 4, причем трехфазный мостовой выпрямитель 2 снабжен сглаживающим дросселем 5 и конденсаторным фильтром 6, к которому параллельно подключены автономные инверторы 3 напряжения и ведомый сетью инвертор 4, кроме того, трехфазный мостовой выпрямитель 2 и ведомый сетью инвертор 4 подключены параллельно к понижающему трансформатору 1, а автономные инверторы 3 напряжения подключены к асинхронным электродвигателям 7 с коротко замкнутым ротором электроприводов экскаватора; блок 8 управления силовой частью снабжен датчиком 9 напряжения звена постоянного тока и соединен с ведомым сетью инвертором 4 и автономными инверторами 3 напряжения; блок управления системой электроприводов экскаватора содержит микропроцессорный блок 10, к которому подключены датчики тока 11 статора и датчики 12 обратной связи по положению ротора асинхронного электродвигателя электропривода экскаватора, задающие элементы 13, интерфейсный блок 14 наладки и мониторинга, причем блок управления системой электроприводов экскаватора связан с блоком управления силовой частью.

Текст
012259 Изобретение относится к управлению горнодобывающей техникой, а именно к управлению электроприводами механизмов одноковшовых карьерных экскаваторов, в частности главных частотнорегулируемых электроприводов карьерного гусеничного экскаватора ЭКГ-5 А. Известны устройства управления электроприводами экскаватора, содержащие задающий блок, подключенный через преобразователь, включающий силовой мост, к электроприводу системы Г-Д; датчики тока и напряжения. Задающий блок представляет собой командоаппарат, построенный по кулачковому принципу. Преобразователь содержит датчик питающего напряжения, регулятор питающего напряжения, датчик напряжения возбуждения, силовой мост, представляющий собой суммирующий магнитный усилитель. Устройство снабжено датчиками нагрузки, температуры, скорости, регулятором снижения динамических нагрузок [1, 2]. Известные устройства имеют недостаточно высокую надежность и быстродействие управления. Система управления является температурозависимой. Наиболее близким по технической сущности к заявляемому устройству является устройство управления электроприводами экскаватора, содержащее задающий блок, преобразователь, включающий датчики тока и напряжения, силовой мост, подключенный к обмотке возбуждения генератора электропривода системы Г-Д. Устройство снабжено блоками нормирования сигнала обратной связи по току и напряжению, включенными в систему Г-Д, соответственно, последовательно и параллельно пультом наладчика, а преобразователь снабжен первым, вторым и третьим коммутационными блоками, микроконтроллером, блоком питания, блоком индикации, блоком элементов защиты и диагностики, блоком управления силовым мостом, последовательным интерфейсом, через который пульт наладчика соединен с микроконтроллером, к которому двунаправлено подключен блок питания, и через последовательно соединенные блок элементов защиты и диагностики и блок управления силовым мостом подключен силовой мост, выполненный на силовых IGBT-транзисторах, блок питания выполнен по схеме однотактного импульсного преобразователя, а задающий блок выполнен в виде командоконтроллера, реализованного по двухкоординатной резистивной схеме, и подключен посредством двунаправленной связи через первый коммутационный блок к микроконтроллеру преобразователя, к которому через последовательно соединенные второй коммутационный блок, подключенный к микроконтроллеру, и датчик напряжения подключен выход блока нормирования сигнала обратной связи по напряжению, а через последовательно соединенные третий коммутационный блок, подключенный к микроконтроллеру, и датчик тока подключен выход блока нормирования сигнала обратной связи по току, один из выходов микроконтроллера подключен к входу блока индикации [4]. Известное устройство является достаточно сложным и инерционным. Кроме того, оно использует традиционные для экскаваторов коллекторные двигатели постоянного тока, которые достаточно дороги,массивны и имеют большие габариты Задачей заявленного технического решения является разработка устройства управления электроприводами экскаватора с асинхронными электродвигателями переменного тока достаточно простого,дешевого надежного и с высоким КПД и быстродействием. Для решения поставленной задачи предлагается устройство управления электроприводами экскаватора, содержащее силовую часть, блок управления силовой частью и блок управления системой электроприводов экскаватора, в котором силовая часть включает понижающий трансформатор 1, трехфазный мостовой выпрямитель 2, по меньшей мере три автономных инвертора 3 напряжения и ведомый сетью инвертор 4, причем трехфазный мостовой выпрямитель 2 снабжен сглаживающим дросселем 5 и конденсаторным фильтром 6, к которому параллельно подключены автономные инверторы 3 напряжения и ведомый сетью инвертор 4, кроме того, трехфазный мостовой выпрямитель 2 и ведомый сетью инвертор 4 подключены параллельно к понижающему трансформатору 1, а автономные инверторы 3 напряжения подключены к асинхронным электродвигателям 7 с короткозамкнутым ротором электроприводов экскаватора; блок 8 управления силовой частью снабжен датчиком 9 напряжения звена постоянного тока и соединен с ведомым сетью инвертором 4 и автономными инверторами 3 напряжения; блок управления системой электроприводов экскаватора содержит микропроцессорный блок 10, к которому подключены датчики тока 11 статора и датчики 12 обратной связи по положению ротора асинхронного электродвигателя электропривода экскаватора, задающие элементы 13, интерфейсный блок 14 наладки и мониторинга, причем блок управления системой электроприводов экскаватора связан с блоком управления силовой частью. Основными технико-экономическими преимуществами устройства управления электроприводами экскаватора являются: 1) возможность рекуперации (возврата) электрической энергии обратно в сеть в генераторном режиме работы асинхронных электродвигателей (опускание ковша для электропривода подъема, торможение при повороте экскаватора для электропривода поворота) с помощью ведомого сетью инвертора на полностью управляемых ключах (IGBT);-1 012259 2) применение одного блока выпрямления, ведомого сетью инвертора, для всех инверторов для экономии места, упрощения системы управления и снижения потерь при рекуперации (непосредственный обмен энергией между автономными инверторами напряжения внутри системы электроприводов); 3) оптимизация входного коэффициента мощности системы электроприводов с целью уменьшения потерь в питающем трансформаторе и подводящей линии (применение сглаживающего дросселя постоянного тока); 4) наличие цифровой микропроцессорной системы управления с удобным для эксплуатации интерфейсом; 5) улучшение динамических и статических характеристик электроприводов за счет применения асинхронных электродвигателей переменного тока, имеющих значительно меньший момент инерции ротора по сравнению с традиционными для экскаваторов коллекторными электродвигателями постоянного тока, а также улучшение динамики электроприводов является следствием уменьшения инерционности системы управления (цифровые регуляторы и быстродействующие датчики тока статора и датчики обратной связи по положению ротора) и инерционности силовой части электроприводов (некомпенсируемая постоянная времени автономного инвертора напряжения в десятки раз меньше, чем постоянная времени системы: полупроводниковый преобразователь постоянного тока - Г-Д). На чертеже представлена схема предлагаемого устройства управления электроприводами экскаватора. Устройство управления электроприводами экскаватора состоит из силовой части, блока управления силовой частью и блока управления системой электроприводов экскаватора. Силовая часть включает понижающий трансформатор 1, трехфазный мостовой выпрямитель 2, по меньшей мере три автономных инвертора 3 напряжения и ведомый сетью инвертор 4, причем трехфазный мостовой выпрямитель 2 снабжен сглаживающим дросселем 5 и конденсаторным фильтром 6, к которому параллельно подключены автономные инверторы 3 напряжения и ведомый сетью инвертор 4,кроме того, трехфазный мостовой выпрямитель 2 и ведомый сетью инвертор 4 подключены параллельно к понижающему трансформатору 1, а автономные инверторы 3 напряжения подключены к асинхронным электродвигателям 7 с короткозамкнутым ротором электроприводов экскаватора. Блок 8 управления силовой частью снабжен датчиком 9 напряжения звена постоянного тока и соединен с ведомым сетью инвертором 4 и автономными инверторами 3 напряжения. Блок управления системой электроприводов экскаватора содержит микропроцессорный блок 10, к которому подключены датчики тока 11 статора и датчики 12 обратной связи по положению ротора асинхронного электродвигателя электропривода экскаватора, задающие элементы 13, интерфейсный блок 14 наладки и мониторинга, причем блок управления системой электроприводов экскаватора связан с блоком управления силовой частью. Устройство работает следующим образом. Понижающий силовой трансформатор 1 питает 3-фазный мостовой выпрямитель 2. Выпрямитель 2 через сглаживающий дроссель 5 постоянного тока питает конденсаторный фильтр 6, который является аккумулятором электроэнергии, протекающей в обоих направлениях (питающая сеть - асинхронный электродвигатель и обратно, асинхронный электродвигатель - питающая сеть). Ведомый сетью инвертор (рекуператор) 4 служит для режима рекуперации энергии во время регенеративного торможения электропривода экскаватора. Автономные инверторы 3 напряжения (ШИМ-инверторы) представляют собой трехфазные мостовые схемы автономного инвертирования (преобразования постоянного напряжения в переменное) с возможностью регулирования величины амплитуды, фазы и частоты выходного напряжения в режиме реального времени. Блок 8 управления силовой частью генерирует и распределяет управляющие импульсы на управляющие электроды силовых полупроводниковых ключей (IGBT-модулей) автономных инверторов напряжения 3 и ведомого сетью инвертора 4 в зависимости от режима работы электроприводов экскаватора. Входными сигналами для блока 8 управления силовой частью являются сигналы задания величины напряжения (амплитуды, фазы и частоты), сигнал обратной связи по напряжению от датчика 9 напряжения звена постоянного тока, а выходными - последовательность управляющих импульсов определенной длительности и частоты. Устройство управления электроприводами экскаватора работает по принципу подчиненного векторного управления скоростью асинхронного электродвигателя с обратной связью по току статора (датчики 11 - измерительные элементы Холла в качестве датчиков обратной связи по току статора) и скорости ротора (фотоимпульсные датчики 12 - энкодеры в качестве обратной связи по положению вала электродвигателя). Данный алгоритм позволяет получить высокие динамические показатели управления электроприводов за счет независимого регулирования магнитного потока ротора и электромагнитного момента на валу электродвигателя. При поддержании магнитного потока ротора на заданном уровне(номинальном) независимо от нагрузки электромагнитный момент асинхронного электродвигателя однозначно определяется моментообразующей составляющей тока статора. Сигналы от датчиков 11 и 12 поступают в микропроцессорный блок 10, где происходят координатные преобразования величин токов из-2 012259 трехфазной неподвижной системы координат (ABC) вначале в двухфазную ортогональную неподвижную систему координат (ab), а затем в двухфазную ортогональную подвижную систему координат (ху),вращающуюся синхронно с магнитным потоком ротора асинхронного электродвигателя. Одновременно с задающего элемента 13 поступает сигнал задания скорости соответствующего рабочего механизма, который сравнивается с сигналом обратной связи по скорости датчика 12 соответствующего асинхронного электродвигателя. Разница сигналов заданной и реальной скорости формирует сигнал управления для пропорционально-интегрального регулятора скорости, который, в свою очередь, формирует задающий сигнал для пропорционально-интегрального регулятора моментообразующего тока, и сигнал с микропроцессора блока 10 поступает в блок 8 управления силовой частью, который на основании задания величины, фазы и частоты выходного напряжения автономного инвертора 3 напряжения формирует выходные открывающие импульсы определенной частоты и длительности для IGBT-модулей инвертора напряжения. Пропорционально-интегральный регулятор намагничивающей составляющей тока статора поддерживает магнитный поток ротора на заданном постоянном уровне, что обеспечивает высокое качество переходных процессов при управлении скоростью передвижения ковша экскаватора. Все координатные преобразования и вычисления регуляторов производятся микропроцессорным блоком 10. Настройка и наладка работы электроприводов экскаватора осуществляются с помощью интерфейсного блока 14, с его же помощью машинист-оператор экскаватора может отслеживать текущие координаты электроприводов (скорость вращения ротора и ток статора) для корректной работы. Ограничение электромагнитного момента асинхронного электродвигателя (создание экскаваторной электромеханической характеристики) осуществляется в микропроцессорном блоке 10 за счет введения нелинейного токоограничивающего звена в канал регулирования моментообразующей составляющей тока статора, которая и определяет величину электромагнитного момента асинхронного двигателя. Для формирования плавных переходных процессов во время разгона и торможения электроприводов (ограничение по механической прочности конструкции экскаватора) применяется программный задатчик интенсивности, который ограничивает темп нарастания скорости рабочего механизма (ковша). Задатчик интенсивности формирует линейное задание скорости для регулятора скорости электродвигателя. В силовом блоке происходит тройное преобразование электроэнергии: из переменного напряжения(6 кВ, 50 Гц) с помощью понижающего трансформатора в переменное напряжение (380 В, 50 Гц), из переменного напряжения (380 В, 50 Гц) с помощью 3-фазного мостового выпрямителя в постоянное напряжение (540 В), из постоянного напряжения (540 В) с помощью автономного инвертора напряжения в переменное напряжение с регулируемой амплитудой, фазой и частотой, которое, поступая на обмотки статора приводного асинхронного электродвигателя, преобразуется в полезную механическую мощность на валу ротора асинхронного двигателя. Для повышения коэффициента мощности конденсаторный фильтр заряжается через дроссель постоянного тока, который сглаживает пики зарядного тока, уменьшая тем самым потери мощности в понижающем трансформаторе. Дроссель не имеет стального сердечника(индуктивность не зависит от тока нагрузки) и выполняет дополнительно защитную функцию, ограничивая возможные аварийные токи короткого замыкания. Конденсаторный фильтр сглаживает пульсации выпрямленного напряжения и служит аккумулирующим элементом для протекающей в обоих направлениях электроэнергии. ФОРМУЛА ИЗОБРЕТЕНИЯ Устройство управления электроприводами экскаватора, содержащее силовую часть, блок управления силовой частью и блок управления системой электроприводов экскаватора, отличающееся тем, что силовая часть включает понижающий трансформатор 1, трехфазный мостовой выпрямитель 2, по меньшей мере три автономных инвертора 3 напряжения и ведомый сетью инвертор 4, причем трехфазный мостовой выпрямитель 2 снабжен сглаживающим дросселем 5 и конденсаторным фильтром 6, к которому параллельно подключены автономные инверторы 3 напряжения и ведомый сетью инвертор 4, кроме того, трехфазный мостовой выпрямитель 2 и ведомый сетью инвертор 4 подключены параллельно к понижающему трансформатору 1, а автономные инверторы 3 напряжения подключены к асинхронным электродвигателям 7 с коротко замкнутым ротором электроприводов экскаватора; блок 8 управления силовой частью снабжен датчиком 9 напряжения звена постоянного тока и соединен с ведомым сетью инвертором 4 и автономными инверторами 3 напряжения; блок управления системой электроприводов экскаватора содержит микропроцессорный блок 10, к которому подключены датчики тока 11 статора и датчики 12 обратной связи по положению ротора асинхронного электродвигателя электропривода экскаватора, задающие элементы 13, интерфейсный блок 14 наладки и мониторинга, причем блок управления системой электроприводов экскаватора связан с блоком управления силовой частью.
МПК / Метки
МПК: E02F 9/20
Метки: экскаватора, электроприводами, управления, устройство
Код ссылки
<a href="https://eas.patents.su/5-12259-ustrojjstvo-upravleniya-elektroprivodami-ekskavatora.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство управления электроприводами экскаватора</a>
Устройство управления синхронным приводным электродвигателем
Номер патента: 11595
Опубликовано: 28.04.2009
Авторы: Климко Иван Юрьевич, Амелько Игорь Александрович
МПК: H02P 1/50, H02P 25/02, H02P 1/46...
Метки: синхронным, устройство, управления, приводным, электродвигателем
Формула / Реферат:
Устройство управления синхронным электродвигателем, содержащее силовой блок, состоящий из питающего трансформатора и выпрямителя, систему управления выпрямителем, датчик тока возбуждения синхронного электродвигателя и датчики тока и напряжения статора синхронного электродвигателя, отличающееся тем, что силовой блок дополнительно содержит блок безударного пуска, состоящий из шунтирующего сопротивления, соединенного последовательно с силовым...
Изнашиваемое устройство для режущей кромки экскаватора
Номер патента: 7025
Опубликовано: 30.06.2006
Авторы: Брискоу Терри Л., Эмрич Роберт К.
МПК: E02F 9/28
Метки: кромки, изнашиваемое, экскаватора, устройство, режущей
Формула / Реферат:
1. Изнашиваемое устройство (10) для присоединения к краю (12) экскаватора, содержащему переднюю режущую кромку (16) и выполненное отстоящим назад от режущей кромки (16) сквозное окно (24), причем изнашиваемое устройство содержит изнашиваемый элемент (14) с передним рабочим концом (44) и задним установочным концом (46), содержащим пару охватывающих край (12) вилкообразных ножек (48), в каждой из которых выполнено отверстие (58) и замок (60),...
Износоустойчивое устройство для экскаватора
Номер патента: 11819
Опубликовано: 30.06.2009
Авторы: Ститзел Адам, Маккланахан Роберт
МПК: E02F 9/28
Метки: устройство, износоустойчивое, экскаватора
Формула / Реферат:
1. Износоустойчивый элемент, предназначенный для защиты режущей кромки экскаваторного оборудования, указанный износоустойчивый элемент содержит переднюю часть; открытую назад полость, предназначенную для размещения несущей конструкции экскаваторного оборудования, указанная полость имеет переднюю часть, границы которой определены верхней поверхностью, нижней поверхностью и передней прилегающей поверхностью, расположенной между верхней и нижней...
Устройство для многорежимного управления трехфазным шаговым двигателем
Номер патента: 3109
Опубликовано: 27.02.2003
Авторы: Арутюнян Ваган, Мурадян Ашот
МПК: G05B 19/02, H02P 8/00
Метки: управления, шаговым, трехфазным, многорежимного, двигателем, устройство
Формула / Реферат:
Устройство для многорежимного управления трехфазным шаговым двигателем, содержащее первый и второй источники питания силовой части с противоположными полярностями, источник питания логической части, четырехразрядный реверсивный двоичный счетчик импульсов со входными шинами тактирования, реверсирования и установки в исходное состояние, первую группу из трех мультиплексоров, соединенных своими выходами с управляющими входами усилителей мощности...
Устройство управления для восстановительных печей переменного тока
Номер патента: 9868
Опубликовано: 28.04.2008
Авторы: Паш Томас, Кунце Юрген, Боргвардт Дитер
МПК: H05B 7/148
Метки: переменного, печей, тока, управления, устройство, восстановительных
Формула / Реферат:
1. Устройство управления для восстановительных печей (15) переменного тока с электродами (14), которое содержит трансформатор (11) и систему (1) регулирования для регулирования подачи энергии в восстановительные печи (15) переменного тока, которая управляет механизмом (17) перемещения для электродов (14), отличающееся тем, что устройство управления дополнительно содержит управляемые силовые электронные переключатели (13) переменного тока,...
Предыдущий патент: Устройство и способ для абсорбции кислого газа и регенерации растворителя
Следующий патент: Замещённые производные метиленамида в качестве модуляторов протеинтирозинфосфатаз ( ртрs )
Случайный патент: Установка для производства низкотемпературного кокса