Устройство к дефектоскопу для автоматического отведения датчиков от поверхности контролируемого изделия
Номер патента: 1260
Опубликовано: 25.12.2000
Авторы: Калинин Олег Борисович, Чебанов Вадим Борисович, Евтюшкин Семен Петрович, Соколов Юрий Самсонович
Формула / Реферат
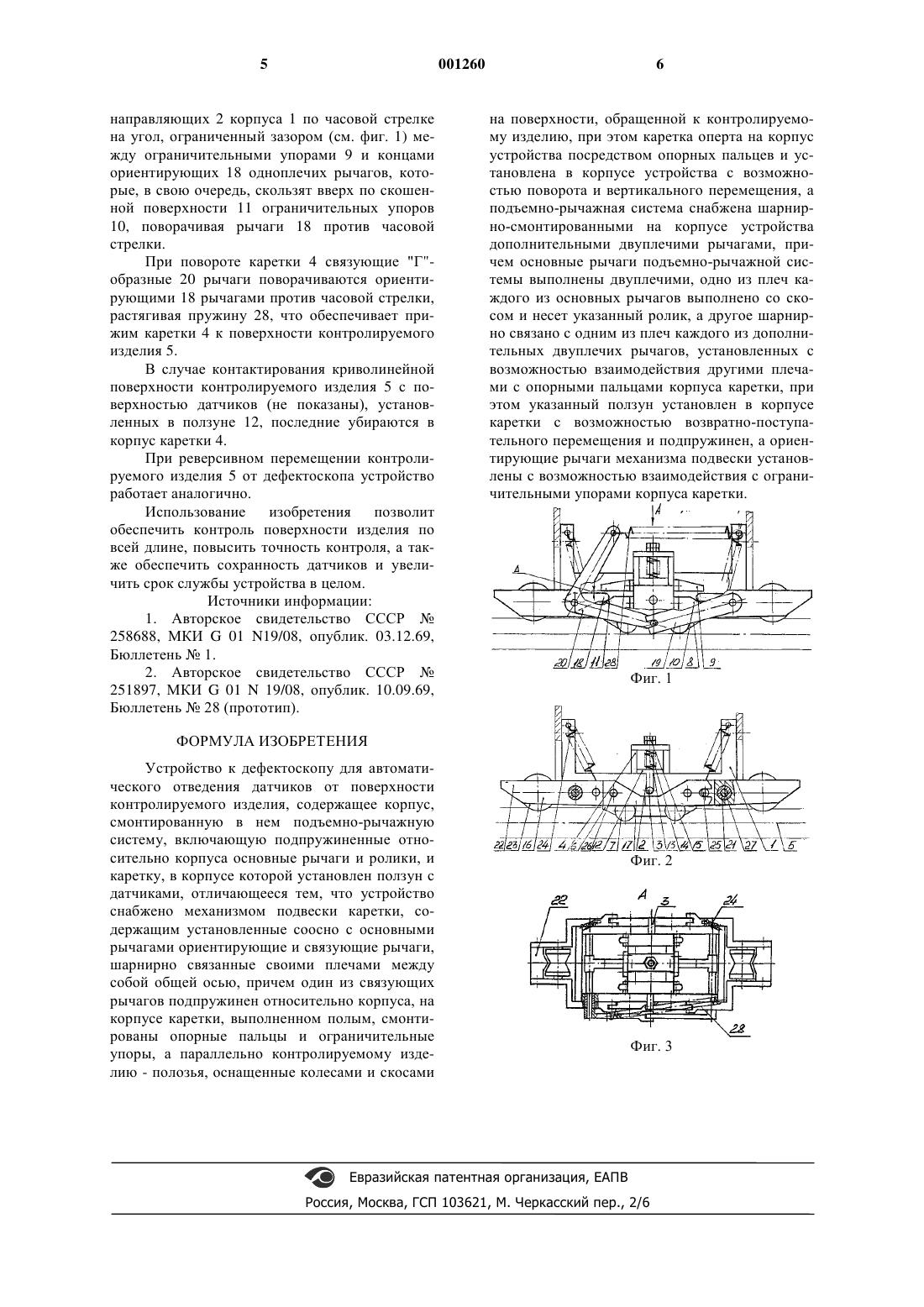
Устройство к дефектоскопу для автоматического отведения датчиков от поверхности контролируемого изделия, содержащее корпус, смонтированную в нем подъемно-рычажную систему, включающую подпружиненные относительно корпуса основные рычаги и ролики, и каретку, в корпусе которой установлен ползун с датчиками, отличающееся тем, что устройство снабжено механизмом подвески каретки, содержащим установленные соосно с основными рычагами ориентирующие и связующие рычаги, шарнирно связанные своими плечами между собой общей осью, причем один из связующих рычагов подпружинен относительно корпуса, на корпусе каретки, выполненном полым, смонтированы опорные пальцы и ограничительные упоры, а параллельно контролируемому изделию - полозья, оснащенные колесами и скосами на поверхности, обращенной к контролируемому изделию, при этом каретка оперта на корпус устройства посредством опорных пальцев и установлена в корпусе устройства с возможностью поворота и вертикального перемещения, а подъемно-рычажная система снабжена шарнирно-смонтированными на корпусе устройства дополнительными двуплечими рычагами, причем основные рычаги подъемно-рычажной системы выполнены двуплечими, одно из плеч каждого из основных рычагов выполнено со скосом и несет указанный ролик, а другое шарнирно связано с одним из плеч каждого из дополнительных двуплечих рычагов, установленных с возможностью взаимодействия другими плечами с опорными пальцами корпуса каретки, при этом указанный ползун установлен в корпусе каретки с возможностью возвратно-поступательного перемещения и подпружинен, а ориентирующие рычаги механизма подвески установлены с возможностью взаимодействия с ограничительными упорами корпуса каретки.
Текст
1 Настоящее изобретение относится к области измерения дефектов поверхностей механическими способами и может быть применено для диагностики различных поверхностей, в том числе цилиндрических, таких как цилиндрические поверхности нефтегазопромысловых труб,насосно-компрессорных, обсадных, бурильных и т.д. Известно устройство к дефектоскопу для контроля цилиндрических изделий [1], осуществляющее сведение и разведение датчиков и центрирующих роликов дефектоскопа, содержащее корпус, радиально расположенные в корпусе подпружиненные штоки, часть которых на одних своих концах несет датчики, а другая - ролики, при этом оно снабжено втулкой, соосной с корпусом и имеющей коническую рабочую поверхность, контактирующую со свободными концами штоков, которые выполнены перемещаемыми вдоль конической поверхности, причем втулка снабжена дополнительными коническими рабочими поверхностями с одинаковой конусностью, количество которых равно количеству групп датчиков и роликов. Однако в данном устройстве датчики не защищены от повреждения дефектами контролируемой поверхности или наличием конструктивных ступеней у контролируемой поверхности. Известно также устройство к дефектоскопу для автоматического отведения датчиков от поверхности контролируемого изделия при прохождении его концевых частей [2], содержащее установленный на каретке с датчиками подпружиненный рычаг с роликом, катящимся по поверхности изделия, который при подходе конца изделия производит подъем датчика, а после прохождения переднего конца - опускание датчика на поверхность изделия. Для предотвращения повреждения датчика при изменении установленной скорости движения изделия каретка датчика снабжена дополнительным блокировочным рычагом, установленным на заданном в зависимости от скорости подачи контролируемого изделия расстоянии от ролика и предназначенным для предотвращения опускания датчика до прохождения мимо него конца изделия. А для сигнализации о необходимости изменения скорости подачи в дефектоскоп изделий рычаги блокировки и ролика снабжены электрическими контактами, предназначенными для замыкания сигнальной цепи при отклонении скорости подачи проверяемых изделий от установленной величины. Недостатком данного устройства также является отсутствие защищенности ползуна и датчиков от истирания цилиндрической поверхностью. Ползун защищен роликом поворотного рычага только в момент прохождения концевой части изделия, т.к. усилие пружин параллелограммного механизма больше усилия пружины 2 рычага ролика. В противном случае необходимость в блокировочном рычаге отпадает. А при прохождении ползуна по цилиндрической части изделия он прижимается пружиной параллелограммного механизма, радиальная составляющая усилия которой имеет относительно большую величину и зависит от усилия поджимной пружины рычага ролика, веса рычагов параллелограммного механизма и веса всей каретки, что затрудняет настройку устройства на минимальное усилие прижима ползуна. В момент прохождения конца изделия на ползун действуют силы инерции веса всей каретки, что также негативно сказывается на защищенности ползуна с датчиками. При этом отсутствуют механизмы самоустановки ползуна параллельно продольной оси контролируемого изделия, что приводит к перекосу ползуна и задирам его контактной поверхности углом торца изделия. Полный контроль всей длины изделия возможен только при размещении датчиков на конце ползуна, когда сработает блокировочный рычаг и контактная поверхность ползуна начнет нормально контактировать с поверхностью цилиндрической части трубы, из-за чего необходимо увеличивать длину ползуна. При полном контроле всей поверхности цилиндрического изделия наличие сбоку от ползуна блокировочного рычага ограничивает угол охвата изделия датчиками в плоскости, перпендикулярной продольной оси изделия, т.к. конец рычага выступает за контактную поверхность ползуна в направлении продольной оси трубы. Кроме того, конструкция данного устройства не предусматривает реверсивного перемещения изделия с заходом изделия с противоположной стороны устройства, т.к. этому препятствует блокировочный рычаг. Изобретение направлено на обеспечение контроля изделия по всей длине и повышение точности контроля за счет подвижности каретки, гибко огибающей все неровности контролируемых поверхностей. Кроме того изобретение позволяет обеспечить сохранность датчиков за счет исключения их столкновения с дефектами или конструктивными особенностями контролируемых поверхностей. Это достигается тем, что устройство к дефектоскопу для автоматического отведения датчиков от поверхности контролируемого изделия, содержит корпус, смонтированную в нем подъемно-рычажную систему, включающую подпружиненные относительно корпуса основные рычаги и ролики, и каретку, в корпусе которой установлен ползун с датчиками. Отличием от прототипа согласно изобретению является то, что устройство снабжено механизмом подвески каретки, содержащим установленные соосно с основными рычагами ориентирующие и связующие рычаги, шарнирно связанные своими плечами между собой общей осью, причем один из связующих рычагов 3 подпружинен относительно корпуса, на корпусе каретки, выполненном полым, смонтированы опорные пальцы и ограничительные упоры, а параллельно контролируемому изделию - полозья, оснащенные колесами и скосами на поверхности, обращенной к контролируемому изделию, при этом каретка оперта на корпус устройства посредством опорных пальцев и установлена в корпусе устройства с возможностью поворота и вертикального перемещения, а подъемно-рычажная система снабжена шарнирносмонтированными на корпусе устройства дополнительными двуплечими рычагами, причем основные рычаги подъемно-рычажной системы выполнены двуплечими, одно из плеч каждого из основных рычагов выполнено со скосом и несет указанный ролик, а другое шарнирно связано с одним из плеч каждого из дополнительных двуплечих рычагов, установленных с возможностью взаимодействия другими плечами с опорными пальцами корпуса каретки, при этом указанный ползун установлен в корпусе каретки с возможностью возвратно - поступательного перемещения и подпружинен, а ориентирующие рычаги механизма подвески установлены с возможностью взаимодействия с ограничительными упорами корпуса каретки. Сущность изобретения поясняется чертежами, где на фиг. 1 представлен общий вид устройства (дополнительные 17 двуплечие рычаги сняты); на фиг. 2 - общий вид устройства (связующие рычаги 19 и 20 сняты); на фиг. 3 - вид А (сверху) на фиг. 1. Устройство содержит корпус 1, в направляющих 2 (см. фиг. 2) посредством опорных пальцев 3 установлена каретка 4. На корпусе каретки 4 параллельно контролируемому изделию 5 смонтированы полозья 6, оснащенные колесами 7. На выступающих за корпус каретки 4 частях полозьев 6 выполнены скосы 8. Корпус каретки 4 несет ограничительные упоры 9 и 10 и выполнен полым. Ограничительный упор 10 имеет скошенную поверхность 11. Внутри корпуса каретки 4 размещен ползун 12, в котором предусматривается крепление датчиков (не показаны). Ползун 12 подпружинен относительно корпуса каретки 4 пружиной 13. В корпусе каретки 4 предусмотрен ограничитель перемещения ползуна 12, выполненный в виде шпильки 14 и гаек 15. Каретка 4 установлена в корпусе 1 с возможностью вертикального перемещения и поворота на опорных пальцах 3, На корпусе 1 устройства смонтирована подъемно-рычажная система, включающая выполненные двуплечими основные 16 рычаги, и дополнительные 17 двуплечие рычаги. На корпусе 1 устройства установлен механизм подвески каретки, содержащий смонтированные соосно с основными 16 рычагами ориен 001260 4 тирующие 18 одноплечие рычаги и связующие 19 и 20 рычаги. Связующий 19 рычаг выполнен одноплечим, а связующий 20 рычаг -"Г"-образным. Основные 16 рычаги шарнирно установлены на полых осях 21 корпуса 1. Одно из плеч каждого из основных 16 рычагов выполнено со скосом 22 и несет ролик 23. Другое плечо каждого из основных 16 рычагов подпружинено пружиной 24 относительно корпуса 1 устройства и снабжено осью 25 для взаимодействия с вилкой, выполненной на одном из плеч каждого из дополнительных 17 двуплечих рычагов, шарнирно установленных в корпусе 1 на осях 26. Другие плечи дополнительных 17 двуплечих рычагов предназначены для взаимодействия с опорными пальцами 3 корпуса каретки 4. Внутри полых осей 21 корпуса 1 смонтированы оси 27, на внутренних концах которых жестко закреплены одноплечие ориентирующие 18 рычаги. На наружных концах осей 27 жестко закреплены связующий "Г" -образный 20 и одноплечий 19 рычаги, шарнирно связанные своими плечами между собой. Другое плечо связующего "Г"-образного 20 рычага подпружинено пружиной 28 относительно корпуса 1 устройства. Одноплечие ориентирующие 18 рычаги смонтированы с возможностью взаимодействия своими плечами с ограничительными упорами 10 и 11 корпуса каретки 4. Устройство работает следующим образом. При движении контролируемого изделия 5 к дефектоскопу его передний конец ударяет в ролик 23, который накатывается на движущееся изделие, одновременно поднимаясь вверх. Если отклонения формы наружной поверхности контролируемого изделия 5 значительны, то поверхность контролируемого изделия первоначально контактирует со скосами 22 основных 16 рычагов, скользя по ним, что предохраняет ролики 23 от удара. При этом основные 16 рычаги поворачиваются относительно полой оси 21 по часовой стрелке, растягивают пружину 24 и осью 25 поворачивают дополнительные 17 двуплечие рычаги против часовой стрелки относительно осей 26. При этом другие плечи дополнительных 17 двуплечих рычагов взаимодействуют с опорными пальцами 3 каретки, приподнимают ее в вертикальном направлении, предохраняя поверхность колес 7 от удара о поверхность контролируемого изделия 5. В случаях значительных отклонений формы наружной поверхности контролируемого изделия 5 по кривизне колеса 7 дополнительно защищены от удара посредством скосов 8 полозьев 6 каретки 4. Криволинейная поверхность контролируемого изделия 5 первоначально контактирует со скосами 9, скользит по ним вниз и поворачивает каретку 4 на опорных пальцах 3 в направляющих 2 корпуса 1 по часовой стрелке на угол, ограниченный зазором (см. фиг. 1) между ограничительными упорами 9 и концами ориентирующих 18 одноплечих рычагов, которые, в свою очередь, скользят вверх по скошенной поверхности 11 ограничительных упоров 10, поворачивая рычаги 18 против часовой стрелки. При повороте каретки 4 связующие "Г"образные 20 рычаги поворачиваются ориентирующими 18 рычагами против часовой стрелки,растягивая пружину 28, что обеспечивает прижим каретки 4 к поверхности контролируемого изделия 5. В случае контактирования криволинейной поверхности контролируемого изделия 5 с поверхностью датчиков (не показаны), установленных в ползуне 12, последние убираются в корпус каретки 4. При реверсивном перемещении контролируемого изделия 5 от дефектоскопа устройство работает аналогично. Использование изобретения позволит обеспечить контроль поверхности изделия по всей длине, повысить точность контроля, а также обеспечить сохранность датчиков и увеличить срок службы устройства в целом. Источники информации: 1. Авторское свидетельство СССР 258688, МКИ G 01 N19/08, опублик. 03.12.69,Бюллетень 1. 2. Авторское свидетельство СССР 251897, МКИ G 01 N 19/08, опублик. 10.09.69,Бюллетень 28 (прототип). 6 на поверхности, обращенной к контролируемому изделию, при этом каретка оперта на корпус устройства посредством опорных пальцев и установлена в корпусе устройства с возможностью поворота и вертикального перемещения, а подъемно-рычажная система снабжена шарнирно-смонтированными на корпусе устройства дополнительными двуплечими рычагами, причем основные рычаги подъемно-рычажной системы выполнены двуплечими, одно из плеч каждого из основных рычагов выполнено со скосом и несет указанный ролик, а другое шарнирно связано с одним из плеч каждого из дополнительных двуплечих рычагов, установленных с возможностью взаимодействия другими плечами с опорными пальцами корпуса каретки, при этом указанный ползун установлен в корпусе каретки с возможностью возвратно-поступательного перемещения и подпружинен, а ориентирующие рычаги механизма подвески установлены с возможностью взаимодействия с ограничительными упорами корпуса каретки. ФОРМУЛА ИЗОБРЕТЕНИЯ Устройство к дефектоскопу для автоматического отведения датчиков от поверхности контролируемого изделия, содержащее корпус,смонтированную в нем подъемно-рычажную систему, включающую подпружиненные относительно корпуса основные рычаги и ролики, и каретку, в корпусе которой установлен ползун с датчиками, отличающееся тем, что устройство снабжено механизмом подвески каретки, содержащим установленные соосно с основными рычагами ориентирующие и связующие рычаги,шарнирно связанные своими плечами между собой общей осью, причем один из связующих рычагов подпружинен относительно корпуса, на корпусе каретки, выполненном полым, смонтированы опорные пальцы и ограничительные упоры, а параллельно контролируемому изделию - полозья, оснащенные колесами и скосами
МПК / Метки
МПК: G01N 19/08
Метки: дефектоскопу, контролируемого, датчиков, отведения, поверхности, устройство, автоматического, изделия
Код ссылки
<a href="https://eas.patents.su/4-1260-ustrojjstvo-k-defektoskopu-dlya-avtomaticheskogo-otvedeniya-datchikov-ot-poverhnosti-kontroliruemogo-izdeliya.html" rel="bookmark" title="База патентов Евразийского Союза">Устройство к дефектоскопу для автоматического отведения датчиков от поверхности контролируемого изделия</a>
Состав для печати изображения на поверхности изделия каучукового латекса, способ печати изображения и изделия из каучукового латекса
Номер патента: 164
Опубликовано: 29.10.1998
Авторы: Маттески Генри, Гаггер Джеймс
МПК: C09D 11/02
Метки: латекса, печати, изображения, изделия, состав, поверхности, способ, каучукового
Формула / Реферат:
1. Состав для печати изображения на поверхности изделия из каучукового латекса, которое устойчиво к истиранию и химическому воздействию, содержащий натуральный каучук, растворитель натурального каучука и пигмент, отличающийся тем, что включает в качестве компонентов: a) композицию для формирования прозрачного слоя, состоящую из натурального каучука и его растворителя, b) предварительно смешанную композицию, включающую ароматический...
Размыкающее устройство для электрического автоматического выключателя сильного тока
Номер патента: 195
Опубликовано: 24.12.1998
Авторы: Кайлла Лионель, Амблар Жан-Ив, Менье Алан, Рамирез Жан-Клод, Перро Мишель
МПК: H01H 73/18
Метки: автоматического, устройство, выключателя, размыкающее, электрического, тока, сильного
Формула / Реферат:
1. Размыкающее устройство для электрического автоматического выключателя сильного тока с формованным корпусом, содержащее однополюсный размыкающий картридж (20), образованный коробкой с двумя кожухами (20А, 20В), выполненными из формованной пластмассы, размещенными в корпусе автоматического выключателя, неподвижный контакт (18), взаимодействующий с подвижным контактом (17) для втягивания дуги внутрь картриджа (20) при размыкании автоматического...
Изделия из искусственного стекловолокна, способы и устройство для их изготовления
Номер патента: 274
Опубликовано: 25.02.1999
Авторы: Есперсен Пауль Хольст, Тондер Флемминг Веисс
МПК: D04H 3/03, C03B 37/05
Метки: стекловолокна, устройство, изделия, искусственного, способы, изготовления
Формула / Реферат:
1. Устройство для изготовления изделий из искусственного стекловолокна, содержащеецентрифугальный механизм (1) для вытягивания нити, имеющий переднюю часть, первый вращаемый ротор (43) или ряд вращаемых роторов, включающий первый ротор (43) и один или более последующих роторов (44, 45 и 46), в котором ротор или роторы установлены с возможностью вращения относительно горизонтальной оси перед передней частью, в результате чего расплав, выливаемый...
Устройство и способ подключения подводного гибкого стояка к конструкции на поверхности
Номер патента: 822
Опубликовано: 24.04.2000
Авторы: Тейксейра Марсело Жозе Барбоза, Кочи Казухико
МПК: F16L 1/12, E21B 43/01
Метки: конструкции, устройство, стояка, способ, поверхности, гибкого, подводного, подключения
Формула / Реферат:
1. Устройство для подключения подводного гибкого стояка к конструкции на поверхности, причем указанный подводный гибкий стояк (14) имеет конечное соединение (15), закрепленное на его соединительном конце, и тяговую головку (16), подключенную к указанному конечному соединению (15), при этом указанное устройство включает в себя соединительное устройство (8), закрепленное на одном конце подводного гибкого стояка (14), и направляющее устройство (1;...
Способ и устройство для изготовления экструдированного изделия из пластмассы и изделие из пластмассы
Номер патента: 540
Опубликовано: 28.10.1999
Авторы: Кирьявайнен Кари, Сьёберг Микаэл, Ярвенкюля Юри
МПК: B29C 47/06, B32B 37/15, B29C 47/38...
Метки: изделия, изготовления, изделие, устройство, пластмассы, способ, экструдированного
Формула / Реферат:
1. Способ изготовления экструдированного изделия, в котором экструдируемый материал в виде порошка, шариков или гранул подают через одно или несколько подающих средств 6 в рабочее пространство, состоящее из емкостей канавок (7) в роторе (1), канавок (8) в статоре (2, 3) и зазора между ними, отличающийся тем, что поперечное сечение указанного пространства уменьшается, по крайней мере, частично непрерывно вдоль оси экструдера и посредством...
Предыдущий патент: Фармацевтическая аэрозольная композиция
Следующий патент: Способ тушения пожара, огнетушащий состав и система пожаротушения
Случайный патент: Выкопочно-теребильный агрегат, а также уборочная машина с таким агрегатом