Детектор и способы детектирования

Формула / Реферат
1. Ультразвуковой детектор для установки в положение для обследования зоны для источника ультразвука, распространяющегося по воздуху, причем детектор содержит корпус, снабженный датчиком обнаружения ультразвукового сигнала и преобразователем для выполнения самотестирования, отличающийся тем, что преобразователь выполнен с возможностью формирования широкополосного ультразвукового сигнала во время самотестирования для приема упомянутым датчиком.
2. Ультразвуковой детектор по п.1, в котором преобразователь сконфигурирован с возможностью формирования широкополосного ультразвукового сигнала, имеющего частотный спектр, подобный спектру, который производится при утечке газа.
3. Ультразвуковой детектор по п.1 или 2, в котором преобразователь содержит дроссель, через который при использовании проходит газ, причем дроссель сформирован с возможностью вырабатывать широкополосный ультразвуковой сигнал при прохождении через него газа при достаточном давлении.
4. Ультразвуковой детектор по любому из пп.1-3, в котором датчик имеет внешне ориентированную чувствительную лицевую поверхность датчика, причем преобразователь установлен внутри корпуса в зоне за датчиком, в результате чего возможность обнаружения ультразвука, распространяющегося по воздуху, посредством внешне ориентированной чувствительной лицевой поверхности датчика беспрепятственно обеспечивается преобразователем, при этом правильное функционирование датчика может быть протестировано упомянутым детектором.
5. Ультразвуковой детектор по любому из пп.1-3, в котором преобразователь установлен так, чтобы вырабатывать широкополосный ультразвуковой сигнал за пределами детектора, в результате чего может быть протестировано правильное функционирование датчика.
6. Ультразвуковой детектор по любому из пп.1-5, который сконфигурирован с возможностью проверять калибровку датчика, используя преобразователь.
7. Ультразвуковой детектор по п.6, в котором при использовании преобразователь вырабатывает, по существу, равномерный частотный спектр в пределах частотного чувствительного диапазона детектора, в результате чего облегчается калибровка детектора.
8. Ультразвуковой детектор по любому из пп.1-7, который сконфигурирован с возможностью при использовании отслеживать ширину полосы частот для ультразвукового сигнала, причем по меньшей мере часть из этой ширины полосы частот удаляется или игнорируется так, чтобы препятствовать генерированию детектором ложного аварийного сигнала в ответ на нежелательный ультразвуковой сигнал.
9. Ультразвуковой детектор по п.8, который сконфигурирован с возможностью при использовании исследовать ширину полосы частот на любые уровни звукового давления, находящиеся выше порога аварийного сигнала, и удалять и игнорировать любой частотный диапазон, который находится ниже определенного процентного отношения ширины полосы частот, в результате чего детектор может работать, по существу, без ложных аварийных сигналов, вызванных нежелательным ультразвуковым сигналом.
10. Ультразвуковой детектор по пп.8-9, сконфигурированный с возможностью периодически отслеживать ширину полосы так, что детектируется любой частотный сдвиг нежелательного ультразвукового сигнала, в результате чего может быть выполнен соответствующий сдвиг на части полосы частот, которая удаляется или игнорируется.
11. Способ обследования зоны источника ультразвука, распространяющегося по воздуху, содержащий этапы, на которых обследуют зону, используя ультразвуковой детектор по любому из предшествующих пп.1-10, при этом преобразователь используется для испускания широкополосного ультразвукового сигнала, в результате чего выполняется самотестирование детектора.
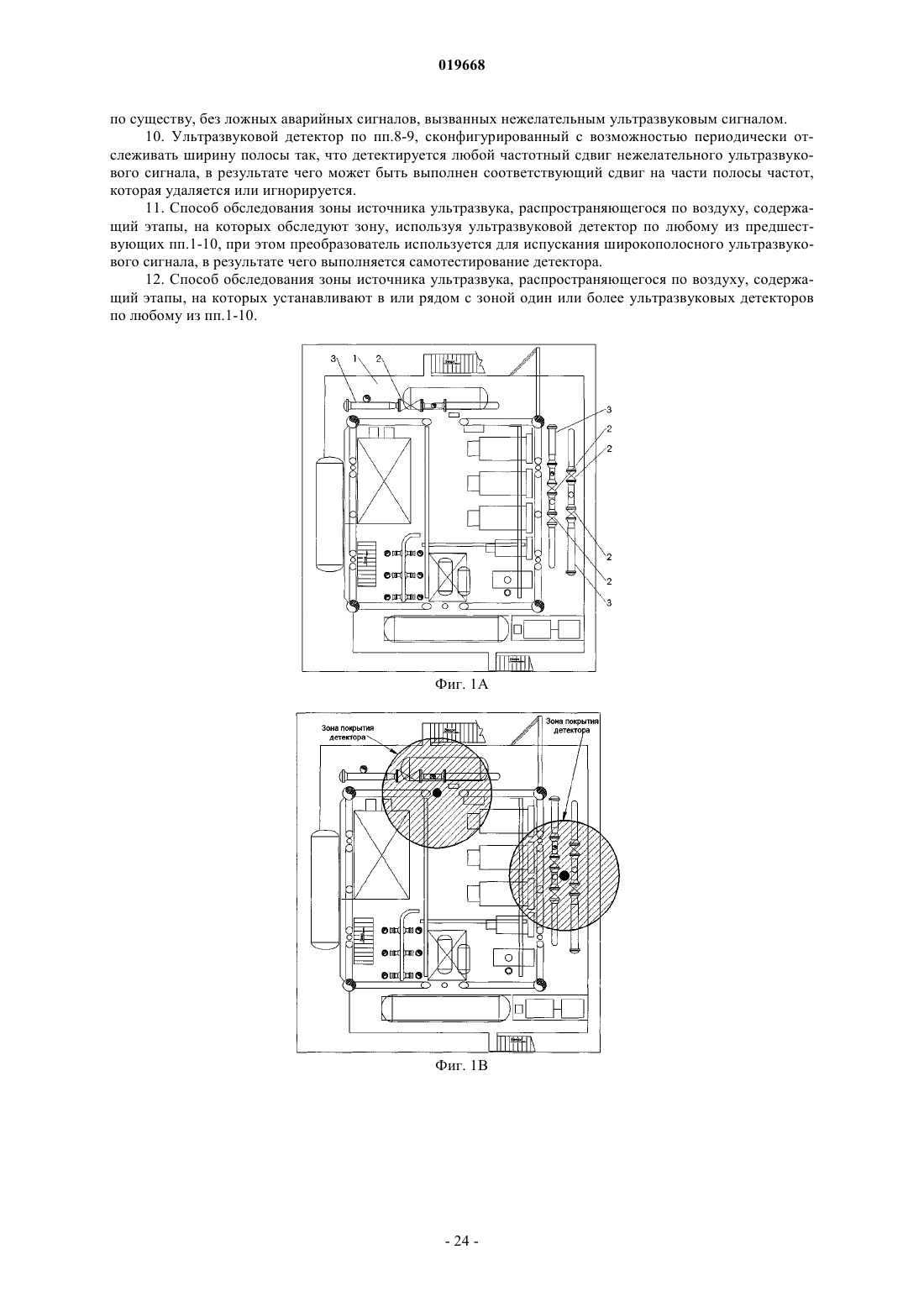
12. Способ обследования зоны источника ультразвука, распространяющегося по воздуху, содержащий этапы, на которых устанавливают в или рядом с зоной один или более ультразвуковых детекторов по любому из пп.1-10.

Текст
Ультразвуковой детектор (10) для установки в положение для обследования зоны источника ультразвука, распространяющегося по воздуху, причем детектор содержит датчик (20) для детектирования ультразвукового сигнала, причем детектор характеризуется тем, что содержит преобразователь (64), сконфигурированный с возможностью формирования широкополосного ультразвукового сигнала для приема датчиком (20), обеспечивая выполнение самотестирования ультразвукового детектора. Роуз Даррен Майкл, Харри Роджер Томас (GB) Медведев В.Н. (RU) Область техники Настоящее изобретение относится к ультразвуковому детектору для детектирования ультразвука,распространяющегося по воздуху, и в определенных аспектах к ультразвуковому детектору для детектирования утечек газа под высоким давлением, способам обследования зоны для источника ультразвука,распространяющегося по воздуху, к ультразвуковому датчику и детектору, содержащему такой датчик. Предшествующий уровень техники Многие промышленные операции, такие как бурение скважин, производство нефти, переработка нефти и промышленное производство газа, используют перекачку по трубопроводу для перемещения широкого разнообразия текучих сред под высоким давлением, таких как газы или жидкости. Трубопроводы перемещают такие текучие среды, в частности, для оперирования и управления промышленными процессами. Зачастую текучие среды, которые перекачиваются по трубопроводу, потенциально являются взрывоопасными, и перекачка по трубопроводу требует тщательного отслеживания утечек; утечек, которые требуется быстро идентифицировать для того, чтобы дать возможность принять подходящие меры по исправлению положения. Другие промышленные операции, включающие в себя повышение давления газа, или операции,включающие вращающиеся части, также могут вырабатывать ультразвук. В последнем случае ультразвук существует по причине, например, механического износа подшипников или нагруженных компонентов. Существующие способы детектирования такого ультразвука используют датчики, механически соединенные с машинным оборудованием для детектирования вибрации через корпус. Однако когда сборки имеют множественные точки нагрузок, количество датчиков, требуемых для детектирования износа, может стать недопустимым из соображений стоимости. На промышленных предприятиях большинство созданного человеком шума возникает в слышимом диапазоне, тогда как утечка газа под давлением производит звуковой сигнал, который охватывает звуковой и ультразвуковой диапазоны. В частности, звуковой сигнал, производимый утечкой газа, распространяется на более низкую часть ультразвукового частотного диапазона от около 20 до около 80 кГц. Амплитуда звукового сигнала является функцией размера утечки, давления в трубе выше по потоку и ниже по потоку от точки утечки, плотности и температуры утекающего газа, температуры окружающей среды, в которую газ дает утечку. Хотя спектры, производимые двумя утечками газа, никогда не являются идентичными, одна характеристика, общая для спектров различных утечек газа, состоит в том, что звуковой сигнал принадлежит к широкополосному типу с постепенно уменьшающейся интенсивностью с увеличением частоты. Эта характеристика способствует доступности детектирования утечки газа. Детекторы утечки газа задуманы так, чтобы измерять волны звукового давления, распространяющиеся по воздуху, генерированные турбулентным потоком, когда газ дает утечку под давлением, изменяющимся от высокого до малого. Типично эти детекторы устанавливаются на производственной площадке в зафиксированном положении (например, на опоре или на стене выше уровня земли около 3 м) для того, чтобы обследовать конкретную часть предприятия. Обычно вокруг предприятия используются несколько таких детекторов, чтобы гарантировать отслеживание для всех важных трубопроводов и т.д. Диапазон чувствительности таких детекторов типично находится в ультразвуковом частотном диапазоне (например, от 25 до 80 кГц) для того, чтобы устранить большинство слышимого шума, который мог бы в противном случае вызывать срабатывание ложного аварийного сигнала. Уровень аварийного сигнала устанавливается в некоторую точку выше пика уровня фонового шума в диапазоне чувствительности, измеренного в местоположении, где должен быть установлен детектор. Например, современные руководства отмечают, что уровень аварийного сигнала должен быть приблизительно на 6 дБ выше пика уровня фонового шума. В настоящее время это сделано на базисе установки-за-установкой проецированием на интересующую зону перед установкой или отслеживанием выходного сигнала детектора после установки. Дополнительной предосторожностью против ложных аварийных сигналов является создание временных задержек в схеме аварийного сигнала; причем чтобы вызвать запуск аварийного сигнала,должны быть удовлетворены два требования: уровень звукового давления детектированного ультразвука должен быть определенной величины и определенной продолжительности. Таким образом, большинство краткосрочных ультразвуковых выбросов (вызванных свистом, металлическим сопровождением, ударами и т.д.) игнорируются детектором. Дополнительное требование состоит в том, что детекторы должны иметь средство самотестирования, чтобы гарантировать функционирование и достигать уровней функциональной пригодности и безопасности (SIL), подходящих для утечек газа под давлением. Это в настоящее время достигается одним из двух способов. Пример первого типа самотестирования описан в ЕР 1522839. Внешне установленный пьезоэлектрический преобразователь используется для генерирования либо одночастотного, либо узкополосного тестового сигнала на предопределенных интервалах и для предопределенного времени в пределах частотного диапазона чувствительности детектора. Микрофон принимает тестовый сигнал и проверяет, попадает ли он в пределы заданного диапазона допуска. Если он не попадает, генерируется сигнал тревоги. Узкий конус чувствительности перед микрофоном требует, чтобы и микрофон и пьезоэлектрический преобразователь были бы установлены снаружи оболочки детектора. Поскольку пьезоэлектрический преобразователь и микрофон подвергаются воздействию окружающей среды, существует проблема принудительного с точки зрения окружающей среды отклонения (объясненного более подробного ниже),которое может вызвать запуск ложного аварийного сигнала. Если отклонение вызвано массивными отложениями (лед, пыль и т.д.) на микрофоне, амплитуда тестового сигнала, как детектировано, будет уменьшена. Это будет указывать, что детектор стал заблокированным и может иметь уменьшенное покрытие, что является полезным при условии, что отложения находятся фактически между пьезоэлектрическим преобразователем и микрофоном. Однако если детектор подвергается экстремальным значениям условий окружающей среды, таким как жара, холод или влажность, сила тестового сигнала у микрофона может либо быть увеличенной, либо увеличенной за пределы приемлемых параметров сигнала. В частности, узкополосный тестовый сигнал, производимый пьезоэлектрическим преобразователем, является более восприимчивым к экстремальным значениям температуры окружающей среды, чем широкополосный сигнал утечки под давлением, который должен быть детектирован. В результате, тестовый сигнал,издаваемый пьезоэлектрическим преобразователем, может попадать за пределы допустимых уровней в точке детектирования (вызывая сигнал о повреждении), даже если детектор все еще функционирует правильно в пределах параметров установки. Как результат, доверие оператора может быть потеряно, что является нежелательным. Если для решения этой проблемы допуски для подходящих источников сигналов увеличиваются, для приемника существует возможность отклониться за пределы допустимых точек калибровки. Дополнительная проблема с этим первым типом самотестирования состоит в том, что монтаж тестового преобразователя снаружи оболочки приводит к образованию мертвой зоны, поскольку он должен выдаваться в конус чувствительности датчика. Второй тип самотестирования, который является более современным, использует естественно происходящий фоновый шум для отслеживания функциональности детектора. В частности, фоновый шум используется для проверки, является ли приемник детектора действующим; если фоновый шум не детектируется, детектор генерирует сигнал о повреждении. Проблемы заключаются в том, что приемник должен иметь очень низкий порог чувствительности (другими словами самотестирование не должно работать в бесшумной окружающей среде), и для оператора не существует другого альтернативного способа проверки функциональности. Итак, существующие ультразвуковые детекторы газа имеют проблемы надежности, связанные с самотестированием. Другая проблема, с которой сталкиваются детекторы утечки газа, состоит в изменении температуры и влажности воздуха между источником утечки газа и детектором. Эти колебания вызывают изменение в амплитуде ультразвука в детекторе; в частности, уменьшая амплитуду при увеличении температуры. Следовательно, важным является проверка того, что такие измерения, относящиеся к окружающей среде,не стали причиной того, что детектор стал "глухим" к утечкам газа при действующем пороге аварийного сигнала. Например, возможно, что утечка газа, которая должна была точно вызвать срабатывание аварийного сигнала, может не сделать этого, если температура на предприятии возросла так, что уровень звукового давления у детектора в это время падает ниже порога аварийного сигнала. Чтобы преодолеть эту проблему известно, что необходимо либо отслеживать внешнюю температуру и влажность для детектора и, соответственно, регулировать уровень аварийного сигнала, либо осуществлять систематическую ручную калибровку детектора. Последний вариант является более общеупотребительным, так как это не требует дополнительного схемного решения в пределах детектора. Однако эта стратегия требует того, чтобы детекторы либо возвращались на завод, либо калибровались на месте. Оба варианта являются долговременными, так как детекторы обычно устанавливаются на несколько метров выше земли для того, чтобы добиться максимальных расстояний, измеряемых датчиком. Способ возвращения на завод включает в себя воссоздание условий места эксплуатации, таких как расстояние, температура, влажность и имитация утечки газа для того, чтобы исследовать чувствительность детектора в различных точках по частотному диапазону детектирования. Способ по месту эксплуатации обращается к переносному устройству, которое содержит источник узкополосного сигнала. Устройство помещается поверх датчика для того, чтобы герметизировать его от окружающей среды, и далее размещается источник узкополосного сигнала на известном расстоянии от датчика. Перенастраивая узкополосный источник для выделения других центральных частот, может быть исследован интересующий широкополосный частотный диапазон. Одна проблема с обоими этими способами состоит в том, что на этом месте эксплуатации требуется обслуживающий персонал для осуществления доступа к детекторам, и калибровка по месту эксплуатации может быть выполнена только по графику технического обслуживания. Было бы выгодным, по меньшей мере, в некоторых вариантах осуществления детектора иметь систему калибровки, которая может воссоздать условия завода и проверять точки по частотному диапазону без потребности осуществления доступа к детектору, в то время как она бы использовалась на месте эксплуатации. Существующие виды ультразвуковых детекторов утечки газа используют единственную чувствительную головку по причине либо стоимости датчика, либо схемного решения, включающего необходимость получения сертификации для использования в опасных зонах. Поскольку не существует непосред-2 019668 ственного взаимодействия между утекающим газом и детектором, на сегодняшний день невозможно определить какой газ дает утечку. Более того, по причине небольшого количества энергии и длин волн в пределах диапазона чувствительности, наряду со свойствами распространения звука по воздуху, является чрезвычайно сложным установить направление источника утечки, используя современную конструкцию датчика. Амплитуда звука, передающегося по воздуху, на заданной частоте у датчика является зависимой, в частности, от размера утечки, давления, типа газа, температуры газа и, наиболее значительно, от расстояния между источником утечки и датчиком. Настоящая установка зафиксированных ультразвуковых детекторов обычно обеспечивает большую зону покрытия, которая может содержать множественные точки утечки под давлением от различных процессов. Одна из современных стратегий при аварийной ситуации заключается в том, чтобы не прекращать работу всех процессов в пределах зоны покрытия. Очевидно, что это является затратным для оператора предприятия, и могло бы не иметь необходимости, если бы расположение утечки и ассоциативно связанный процесс могли быть идентифицированы более точно. Было бы выгодно, по меньшей мере, в некоторых вариантах осуществления детектора предоставить указание направления утечки газа по отношению к одному или более детекторам. Установка детекторов утечки газа служит поводом для дополнительных проблем. В частности, современный способ включает в себя проецирование фонового ультразвукового шума в пределах частотного диапазона детектора в зоне установки. Затем регулируется вручную уровень аварийного сигнала детектора, чтобы удовлетворять требованиям условий места эксплуатации. В частности, уровень аварийного сигнала часто устанавливается приблизительно на 6 дБ выше, чем уровень фона. Одна проблема с этим способом заключается в том, что чем выше уровень фонового шума, тем меньше диапазон детектирования детектора. Это обусловлено тем фактом, что высвобождение газа под давлением будет генерировать уровень звукового давления, который уменьшается приблизительно на 6 дБ всякий раз при удвоении расстояния от источника. Например, если утечка производит 102 дБ на расстоянии 1 м, уровень звукового давления будет 96 дБ на 2 м, 90 дБ на 4 м и т.д. Так как уровень аварийного сигнала обычно устанавливается на 6 дБ выше фона, поэтому установка уровня аварийного сигнала для 84 дБ фона будет 90 дБ. Это будет предоставлять уровень детектирования в 4 м для заданного примера утечки. Если уровень шума равен 90 дБ, современный подход предписывает, что радиус детектирования будет 2 м. Если радиус детектирования является очень маленьким, вместо этого используются другие виды детектирования газа, такие как инфракрасные точечные детекторы, из-за их возможности идентифицировать газ. В этой методологии была идентифицирована дополнительная проблема: среда фонового шума является динамической. Следовательно, периодически должны пересматриваться максимально безопасные уровни аварийного сигнала, чтобы гарантировать, что расстояние чувствительности детектора не ухудшилось. Большинство ультразвукового фонового шума характеризуется как выброс узкополосного шума(типично от 1 до 2 кГц) где-то в пределах диапазона чувствительности детектора. Такие выбросы часто вызваны несовершенными механическими компонентами в машинном оборудовании или затуханиями от устройств аварийных сигналов. Вследствие сущности механического шума, выбросы могут изменить частоту, так как износ продолжает приводить к отклонению вверх или вниз от начальной частоты выброса. При использовании функциональности существующих детекторов такие выбросы могут приводить к ложным аварийным сигналам. Способ современной установки обычно справляется с такими выбросами либо уменьшением радиуса детектирования ультразвукового детектора, либо выбором другого способа детектирования. Следовательно, было бы выгодным предоставить такой детектор, который мог быть бы использован в зонах, содержащих электронные измерительные преобразователи и/или механическую среду, и который не вызывает запуск ложных аварийных сигналов от ультразвуковых сигналов, изданных от измерительных преобразователей и/или техники и оборудования. Насколько знает и понимает заявитель, все имеющиеся в распоряжении в настоящее время датчики для детектирования ультразвука, распространяющегося по воздуху, принадлежат к двум основным типам: микрофонному и пьезоэлектрическому; каждый использует различные способы для измерения уровня звукового давления. Микрофоны типично используют диафрагму, которая двигается в пределах электромагнитного поля или действует как одна обкладка конденсатора, который, в свою очередь, создает колебания электрического тока. Электрический ток затем может быть обработан для определения частоты и уровня звукового давления, присутствующего в диафрагме. Вследствие сущности конструкции микрофонов электромагнитное поле или зона между обкладками конденсатора имеет потребность в том, чтобы быть лишенной влаги и других загрязнений для сохранения в силе точных допусков сигналов. При использовании в неблагоприятных промышленных условиях окружающей среды (например, на нефтебуровой установке) чувствительная лицевая поверхность должна быть защищена от попадания влаги и загрязнения, что означает, что она может быть смонтирована только направленной вниз, что сильно ограничивает диапазон чувствительности. Дополнительный недостаток возникает по причине использования различных материалов в диафрагме и компонентах электромагнитного поля или компонентах в сборке конденсатора и воздушного зазора. При экстремальных значениях температур скорости расширения и сжатия различных материалов приводят к отклонению сигнала. Конструкция микрофона также является чрезвычайно сложной, так как должно быть обеспечено тщательное управление допусками сборки, и конструирование должно происходить в чистой окружающей среде так, чтобы можно было устранить влагу и загрязнения во время сборки, что ведет к очень высокой стоимости сборки. Пьезоэлектрические датчики имеют способность вырабатывать электрический потенциал, который является пропорциональным прикладываемому механическому давлению. Такие датчики были использованы в детекторах, и пример детектора ультразвука, распространяющегося по воздуху, применяющего пьезоэлектрический датчик (продается Groveley Detection Limited под кодом изделия GDU-0). Такой детектор содержит пьезоэлектрический датчик, на котором смонтирован демпфирующий блок или сходный материал, как это обычно общепринято. Цель этого демпфирующего блока в том, чтобы заглушать собственную частоту пьезоэлектрика так, чтобы он имел более широкую полосу частот чувствительности; с этой целью демпфирующий блок содержит материал, имеющий акустическое сопротивление, которое близко или совпадает с акустическим сопротивлением пьезоэлектрика. От детекторов ультразвука, распространяющегося по воздуху, часто требуется, чтобы они оставались действующими на протяжении широкого диапазона температур, для того чтобы они могли быть использованы в неблагоприятных условиях окружающей среды, например на установках для бурения нефтяных скважин. GDU-01 удовлетворительно работает в температурном диапазоне от около -25 до+65 С. Он является все же пригодным для работы немного за пределами этого диапазона, хотя пьезоэлектрический кристалл начинает испытывать отклонение, вызванное температурой. Установки для бурения нефтяных скважин вводятся в эксплуатацию на местах, где температура регулярно падает ниже или выше вышеупомянутого диапазона, и существует потребность в производстве детекторов ультразвука, распространяющегося по воздуху, которые могут работать надежно в более широких диапазонах температур, например между -55 и +85 С. Мы идентифицировали проблему, которая вызывает отклонение, вызванное температурой: пьезоэлектрический кристалл и блок демпфирования, каждый, имеют различные коэффициенты температурного расширения. При вышеупомянутых экстремальных значениях температур относительное сжатие или расширение каждой части имеет нежелательный эффект для частотной характеристики детектора. По причине относительно слабого сигнала (типично милливольт), производимого пьезоэлектрическим кристаллом, демпфирующий блок должен быть с большой осторожностью смонтирован с кристаллом,чтобы избежать потерь, а следовательно, снижения производительности. Современные способы монтирования включают в себя склеивание и применение вязких мембран под действием усилия зажима. Поэтому мы понимаем, что в то время как пьезоэлектрический кристалл является чрезвычайно надежным в неблагоприятных условиях окружающей среды, потому что он является невосприимчивым к влаге и другим загрязнителям, он может быть подвержен отклонениям экстремальных значений температур по причине разницы в расширении и сжатии пьезоэлектрического материала и материала блока демпфирования. Было бы выгодным, по меньшей мере, в некоторых вариантах осуществления предоставить детектор, который обеспечивает меньшее отклонение, вызванное температурой, и/или повышенную линейность на протяжении его диапазона детектирования при более широком диапазоне температуры, например между около -55 и +85 С. Диапазон детектирования может быть между 25 и 80 кГц и между от около 58 до 106 дБ. Краткое изложение существа изобретения Согласно некоторым вариантам осуществления настоящего изобретения предоставлен ультразвуковой детектор, пригодный для установки в положение для обследования зоны для источника ультразвука,распространяющегося по воздуху, причем детектор содержит датчик для детектирования ультразвукового сигнала, и характеризующийся тем, что содержит преобразователь, сконфигурированный с возможностью или адаптированный для вырабатывания широкополосного ультразвукового сигнала для приема датчиком, обеспечивающего выполнение самотестирования ультразвуковым детектором. Предпочтительно самотестирование выполняется детектором, когда он установлен на месте. В некоторых вариантах осуществления самотестирование является периодическим принудительным тестом, а в других вариантах осуществления самотестирование является периодической проверкой калибровки. В других вариантах осуществления детектор сконфигурирован с возможностью выполнения и периодических принудительных тестов и периодических проверок калибровки. При генерировании широкополосного звукового сигнала может быть проверено надежное функционирование детектора по его полному частотному диапазону или предпочтительно по его более маленькой части. Более того, широкополосный звуковой сигнал имеет частотный спектр, который более близко напоминает настоящую утечку газа и, следовательно,можно более надежным способом протестировать правильное функционирование детектора. Дополнительное преимущество получают, если преобразователь размещается внутри корпуса детектора, преобразователь и сигнал, который он производит во время использования, и тот, и другой защищены от внешней окружающей среды детектора. Таким образом, изменения в температуре и влажности во внешней окружающей среде имеют ограниченное воздействие на работу преобразователя и на широкополосный ультразвуковой сигнал, на основании чего значительно улучшается точность самотестирования. Источником передающегося по воздуху ультразвука может быть газовая утечка, удаленная от детектора. Детектор предпочтительно не принадлежит к разновидности переносного устройства и предназначается для установки в зафиксированном положении на промышленном предприятии. Детектор может быть перемещен с этого зафиксированного положения для технического обслуживания или других целей. В некоторых вариантах осуществления детектор сконструирован для использования во взрывоопасных окружающих средах. Детектор имеет частотный диапазон, в котором он является наиболее чувствительным; этот частотный диапазон может содержать более низкую часть ультразвукового частотного диапазона, например от около верхнего порога слышимости человека до около 80 кГц. Для работы был признан удовлетворительным частотный диапазон от 25 до 80 кГц, хотя возможны другие более узкие или более широкие частотные диапазоны. В некоторых вариантах осуществления детектор сконфигурирован с возможностью детектировать источник ультразвука, передающегося по воздуху, который содержит утечку газа, например утечку газа под высоким давлением, от технического оборудования на промышленном предприятии. Детектор может быть также пригодным для детектирования ультразвука, распространяющегося по воздуху, испускаемого изношенными или нагруженными механическими частями. В некоторых вариантах осуществления источник ультразвука, распространяющегося по воздуху,производит спектр, имеющий широкополосную характеристику, без какой-либо частоты, которая является доминантной. Широкополосный спектр обычно охватывает большую часть из частотного диапазона детектора. В некоторых вариантах осуществления датчик может быть любым датчиком, который содержит по меньшей мере две противоположно расположенные чувствительные поверхности. Например, датчик может содержать пьезоэлектрический преобразователь и может быть преобразователем цирконата-титоната свинца (PZT). Форма такого пьезоэлектрического преобразователя может быть в целом цилиндрической(например, круговой или овальной) или гексаэдрической, такой как куб, прямоугольный параллелепипед,призма или ромбоэдр. Приемлемой была признана форма прямоугольного параллелепипеда. Датчик может содержать часть преобразователя микрофона, таким образом, обычно скрытая сторона микрофонного преобразователя может быть использована для сбора широкополосного ультразвукового сигнала от преобразователя. Микрофонный преобразователь может быть использован с любым полярным шаблоном и преобразователь может быть размещен в пределах детектора для работы с этим полярным шаблоном. Преобразователь детектора может быть любым преобразователем, допускающим вырабатывание широкополосного ультразвукового сигнала в пределах (но не обязательно в пределах) частотного диапазона детектора. Существует множество способов вырабатывания такого сигнала, который может быть использован в детекторе, который может включать в себя, но не ограничен этим, вибрирующие поверхности, которые вибрируют от гармонических колебаний или вибрируют от входного сигнала, содержащего множественные частоты; высвобождение газа, находящегося под давлением; и высвобождение газа около или напротив поверхности, чтобы вызвать вибрацию этой поверхности. Примеры конкретных преобразователей для производства такого сигнала включают в себя, но не ограничены, электростатические преобразователи; пьезоэлектрические пленочные преобразователи; трубки или трубы, имеющие подходящую форму, через которые может проходить газ под давлением. Трубы могут быть обеспечены соплом для вырабатывания, например, широкополосного ультразвукового сигнала. В некоторых аспектах преобразователь сконфигурирован с возможностью вырабатывать широкополосный ультразвуковой сигнал, имеющий частотный спектр, который подобен или который имитирует частотный спектр, производимый утечкой газа. Частотный спектр может быть сходного вида, но более значительной интенсивности, так что он может быть без труда детектирован детектором на фоне уровней фонового шума. Например, преобразователь может вырабатывать сигнал, имеющий общий уровень звукового давления от 85 до 95 дБ по частотному диапазону детектора. Преобразователь может содержать дроссель, через который при использовании проходит газ, причем дроссель имеет форму для вырабатывания широкополосного ультразвукового сигнала при прохождении через него газа под достаточным давлением. В некоторых вариантах осуществления преобразователь монтируется внутри внешнего корпуса детектора в зоне за датчиком, на основании чего чувствительная поверхность датчика не подвержена влиянию преобразователя, но правильное функционирование датчика может тем не менее быть протестировано детектором. В других аспектах преобразователь смонтирован так, чтобы вырабатывать широкополосный ультразвуковой сигнал с наружной стороны детектора, на основании чего может быть протестировано правильное функционирование датчика. Вместо того чтобы монтировать преобразователь в пределах корпуса датчика, возможно испускать широкополосный ультразвуковой сигнал за пределами детектора, например либо при монтировании преобразователя вне корпуса или в пределах корпуса, но выпуская звук во внешнюю окружающую среду. Детектор может быть сконфигурирован с возможностью проверять калибровку датчика, используя преобразователь. Для проверки калибровки возникает конкретное преимущество, когда преобразователь монтируется в пределах корпуса. В частности, поскольку преобразователь не подвергается действию внешней окружающей среды, величина допусков в проверке калибровки может быть значительно сокращена. Это дает возможность раньше идентифицировать любые проблемы в детекторе. Например,ручная проверка калибровки типично использует величину допусков 5 дБ при сигнале калибровки 95 дБ. В том случае, если выходные данные детектора находятся между 90 и 100 дБ, детектор считается удовлетворительно откалиброванным. Использование внутреннего преобразователя для выполнения проверки дает возможность уменьшить эту величину допуска до 1 дБ или ниже. В некоторых вариантах осуществления детектор может проверять уровень звукового давления на некотором количестве различных частот в пределах ширины полос детектора и сравнивать каждый уровень с предварительно установленным порогом. В некоторых вариантах осуществления преобразователь производит, по существу, равномерный частотный спектр в пределах частотного диапазона чувствительности детектора, на основании чего облегчается калибровка детектора. Детектор может быть сконфигурирован с возможностью при использовании обрабатывать выходной сигнал от датчика для оценки направления источника ультразвукового сигнала. Предоставление указания направления может дать возможность оператору предприятия рассмотреть возможность прекращения работы только определенных процессов предприятия, вместо всех процессов в пределах зоны покрытия детектора. Оценка направления может быть просто на одной или другой стороне от срединной линии, проходящей через датчик. Дополнительно или в альтернативном варианте оценка может обеспечивать более точное направление, например в пределах определенного диапазона углов. Предпочтительно детектор сконфигурирован с возможностью оценивать направление удаленного источника ультразвука, такого как утечка газа. В некоторых вариантах осуществления детектор содержит по меньшей мере два датчика и сконфигурирован с возможностью при использовании обрабатывать выходной сигнал от каждого по меньшей мере из двух датчиков для предоставления оценки направления. Использование большего количества датчиков для получения направления помогает улучшить точность. В других аспектах при использовании детектор или его часть выполнена с возможностью поворота вокруг оси, на основании чего датчик может быть поворотным при отслеживании выходного сигнала, и детектор сконфигурирован с возможностью поворота, пока сигнал не станет, по существу, максимальным, или другого предопределенного значения, на основании чего указание направления предоставляется по поворотному положению детектора относительно опорного положения. Это дает возможность точной оценки направления, которая может быть получена, используя только один датчик. При использовании двух датчиков детектор может вращаться, пока выходные сигналы от каждого датчика не станут, по существу, одинаковыми; источник приблизительно лежит на линии, делящей пополам угол между двумя датчиками. В некоторых аспектах детектор сконфигурирован с возможностью при использовании отслеживать полосу частот для ультразвукового сигнала, причем по меньшей мере часть этой полосы частот удаляется или игнорируется так, чтобы предотвратить генерирование ложного аварийного сигнала детектором в ответ на нежелательный ультразвуковой сигнал. Это дает возможность детектору продолжать работать в окружающих средах с высоким фоновым шумом. Детектирование нежелательной части ширины полос,имеющей высокий уровень звукового давления, может указывать на машинный износ или другую проблему в машинном оборудовании на предприятии. Соответственно детектор может быть сконфигурирован с возможностью предупреждать оператора предприятия, когда такая часть ширины полосы частот детектирована. Нежелательный звуковой сигнал может иметь широкополосные или узкополосные характеристики, и детектор может быть сконфигурирован с возможностью удалять или игнорировать тот или другой тип сигнала. Какая часть удаляется или игнорируется детектором будет определено в зависимости от каждого места эксплуатации, и где расположен детектор. В некоторых вариантах осуществления детектор сконфигурирован с возможностью при использовании исследовать полосу частот на наличие любых уровней звукового давления выше порога аварийного сигнала и удаление или игнорирование частотного диапазона, который находится ниже предопределенного процентного отношения полосы частот, на основании чего детектор может работать, по существу, без ложных аварийных сигналов, вызванных нежелательным ультразвуковым сигналом. Таким образом, предоставляется безопасная пороговая величина, выше которой вызывается запуск аварийного сигнала, поскольку достаточно полосы занимается ультразвуковым шумом выше фонового шума для указания, например, утечки газа. Детектор может быть сконфигурирован с возможностью периодически отслеживать полосу с тем,чтобы детектировался любой частотный сдвиг нежелательного ультразвукового сигнала, на основании чего соответствующий сдвиг может быть сделан на части полосы частот, которая удаляется или игнорируется. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен способ обследования зоны для источника ультразвука, распространяемого по воздуху, причем способ содержит этапы на которых, обследуют зоны, используя ультразвуковой детектор, расположенный сверху, и используя преобразователь для того, чтобы испускать широкополосный ультразвуковой сигнал, на основании чего выполняется самотестирование детектора. В некоторых вариантах осуществления способ может дополнительно содержать этап, на котором детектор выдает аварийный сигнал при детектировании источника ультразвука, распространяющегося по воздуху. Аварийный сигнал может вызвать запуск удаленных аварийных сигналов где-нибудь еще на месте или не на месте эксплуатации для того, чтобы предупредить оператора. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен способ обследования зоны для источника ультразвука, распространяющегося по воздуху, причем способ содержащий этапы, на которых устанавливают в или вблизи от зоны один или больше ультразвуковых детекторов расположенных сверху. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен ультразвуковой детектор, пригодный для установки в положение обследования зоны для источника ультразвука,распространяющегося по воздуху, причем детектор, содержащий датчик для детектирования ультразвукового сигнала и характеризующийся тем, что детектор сконфигурирован с возможностью обрабатывать выходной сигнал от датчика для предоставления выходного сигнала, указывающего направление источника ультразвукового сигнала. Если детектор является детектором статического типа, требуются два или более датчиков для того, чтобы дать возможность указать определяемое направление. Однако если детектор является поворотным или содержит часть, которая удерживает датчик так, что он может поворачиваться для указания направления, которое должно быть определенным, возможно использовать только один датчик. Любые направленности признаков, упомянутые в материалах настоящей заявки, могут быть объединены с этим аспектом изобретения. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен ультразвуковой детектор, пригодный для установки в положение для обследования зоны для источника ультразвука,распространяющегося по воздуху, и содержит датчик для детектирования ультразвукового сигнала, характеризующийся тем, что детектор сконфигурирован с возможностью при использовании отслеживать полосу частот для ультразвукового сигнала, причем по меньшей мере часть этой полосы частот удаляется или игнорируется так, чтобы препятствовать генерированию ложного аварийного сигнала детектора в ответ на узкополосный ультразвуковой сигнал. Любые из признаков удаления частоты, описанные в материалах настоящей заявки, могут быть объединены с этим аспектом изобретения. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен ультразвуковой детектор, пригодный для установки в положение обследования зоны для источника ультразвука,распространяющегося по воздуху, причем детектор содержит датчик для детектирования ультразвукового сигнала, и характеризующийся тем, что преобразователь смонтирован внутри корпуса детектора и сконфигурирован с возможностью вырабатывания ультразвукового сигнала для приема датчиком, обеспечивая выполнение самотестирования ультразвуковому детектору. Ультразвуковой сигнал может быть широкополосным, узкополосным или, например, одночастотным. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен способ обследования зоны для источника ультразвука, распространяющегося по воздуху, причем способ содержит этапы, на которых обследуют зону, используя ультразвуковой детектор, расположенный сверху, и используя преобразователь, чтобы издавать ультразвуковой сигнал внутри детектора, на основании чего выполняется самотестирование детектора. Ультразвуковой сигнал может быть широкополосным, узкополосным или, например, одночастотным. Согласно некоторым вариантам осуществления настоящего изобретения предоставлен ультразвуковой датчик для детектирования источника ультразвука, распространяемого по воздуху, в пределах частотного диапазона детектирования, причем ультразвуковой датчик, отличающийся тем, что недемпфированный пьезоэлектрический кристалл удерживается в материале, который обеспечивает, по существу,свободную деформацию пьезоэлектрического кристалла в ответ на характерный ультразвук в пределах частотного диапазона детектирования, так что между двумя его лицевыми поверхностями генерируется напряжение, причем этот материал препятствует вибрации пьезоэлектрического кристалла, когда он подвергается вибрациям, находящимся за пределами частотного диапазона детектирования. Было выяснено, что датчик сконструированный таким способом имеет повышенную устойчивость к температуре; в частности, диапазон линейного отклика увеличивается по меньшей мере от -55 до +85 С,что дает возможность быть примененным в очень суровых окружающих средах, таких как Аляска и Сибирь. Однако это главное преимущество достигается простой конструкцией. Теоретически предполагается, что такой датчик может предложить, по существу, линейный отклик около -80 и +200 С, хотя это не было доказано на практике. В некоторых вариантах осуществления пьезоэлектрический кристалл содержит пьезоэлектрический материал, и отношение между плотностью пьезоэлектрического материала и плотностью материала находится между около 1:50 и 1:60. Было обнаружено, что это отношение плотности является особенно эффективным из расчета обеспечения деформирования пьезоэлектрического кристалла в ответ на ультразвуковые волны, и изолирования пьезоэлектрика от других источников шума, находящихся за пределами этого частотного диапазона, например от вибрации двигателей. В некоторых аспектах материал содержит пеноматериал. Пеноматериал может быть с открытыми или закрытыми порами, но последнее является предпочтительным для некоторых приложений, например, где для датчика требуется степень защиты от проникновения. В некоторых вариантах осуществления материал окружает и находится в контакте, по существу, со всей поверхностью пьезоэлектрического кристалла, за исключением чувствительной поверхности и области поверхности, противоположной чувствительной поверхности, к которой прикрепляется электрод. В некоторых аспектах пьезоэлектрический кристалл содержит чувствительную поверхность, а продольный размер чувствительной поверхности не длиннее приблизительно двух самых коротких длин волн из частотного диапазона детектирования. Это помогает уменьшить гасящую интерференцию между звуковыми волнами на чувствительной поверхности. В некоторых вариантах осуществления пьезоэлектрический кристалл имеет такую длину, что резонансная точка пьезоэлектрического кристалла лежит за пределами частотного диапазона детектирования. Предпочтительно резонансная частота лежит выше самой высокой частоты из диапазона детектирования,в соответствии с чем длина пьезоэлектрического кристалла может быть сохранена сравнительно короткой. В некоторых аспектах датчик дополнительно содержит клетку Фарадея для изолирования пьезоэлектрического кристалла от электромагнитного шума. В некоторых вариантах осуществления клетка Фарадея окружена демпфирующим материалом для демпфирования внешней вибрации датчика. Таким образом, обеспечивается двухступенчатый механизм демпфирования вибраций за пределами частотного диапазона детектирования. Было рассмотрено, что больше чем две ступени могут быть выгодными при конкретных обстоятельствах, например, где требуется изоляция от очень высокого уровня вибраций. Демпфирующий материал может быть или может не быть таким же материалом, как материал окружающий пьезоэлектрический кристалл. В соответствии с другими аспектами изобретения предоставлен детектор, содержащий датчик, как изложено выше. Детектор может быть переносным или непереносным. Краткое описание чертежей В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых фиг. 1 А и 1B изображают схематические виды сверху части промышленного предприятия и расположений детекторов в нем; фиг. 2 - схематичный общий вид детектора утечки газа согласно настоящему изобретению; фиг. 3 - схематичный вид снизу детектора утечки газа фиг. 2; фиг. 4 - схематичный вид сбоку детектора утечки газа фиг. 2; фиг. 5 - схематичный вид бокового сечения части детектора газовой утечки фиг. 2; фиг. 6 - увеличенный вид части датчика детектора, показанного на фиг. 5; фиг. 7 - схематичный вид бокового сечения части датчика детектора, показывающий механизм подогрева; фиг. 8 А-8D - часть преобразователя детектора фиг. 2; фиг. 8 Е - диаграмму зависимости частоты от дБ части преобразователя фиг. 8 А-8D при использовании; фиг 9 - блок-схему электроники в пределах детектора на фиг. 2; фиг. 10 - блок-схему последовательности операций способа детектирования одиночного датчика согласно настоящему изобретению; фиг. 11 - блок-схему последовательности операций способа детектирования множественных датчиков согласно настоящему изобретению; фиг. 12 - блок-схему последовательности операций способа оценки направления утечки газа согласно настоящему изобретению; фиг. 13 - схематический вид плоскости детектора, иллюстрирующий принципы, примененные в способе на фиг. 12; фиг. 14 - схематический вид сверху места эксплуатации фиг. 1 А и 1 В, показывающий улученную оценку направления; фиг. 15 - схематичный вид сбоку детектора, показывающий перекрытие зон покрытия датчиков; фиг. 16-20 - диаграммы различных спектров для иллюстрации принципов настоящего изобретения; фиг. 21 - блок-схему последовательностей операций способа, показывающую способ удаления частоты согласно настоящему изобретению; фиг. 22-27 - диаграммы различных спектров, иллюстрирующие принципы и результаты настоящего изобретения; фиг. 28 - схематическое сечение датчика согласно настоящему изобретению; фиг. 29 - схематическую блок-схему схемы предварительного усиления для использования с датчиком фиг. 28. Описание предпочтительных вариантов осуществления изобретения Со ссылкой на фиг. 1 А часть 1 промышленного бурового предприятия содержит множественные клапанные станции 2 между стойками 3 трубоприемника и подземными бурильными головками (не показаны). Клапанные станции 2 регулируют количество входящего материала от буровых головок (не показаны) к следующей обрабатывающей площадке через стойки 3 труб. Как таковое предприятие обеспечивает функцию регулировки давления для газа (например, природного газа) между бурильными головками и системой подготовки продукции скважин к транспортированию по предприятию. Для клапанов и трубопроводов является важным отслеживание любых утечек; такие утечки могли бы стать потенциальной опасностью взрыва. Фиг. 1 В показывает, где на предприятии были установлены два детектора и их соответственные зоны покрытия, в которых может быть детектирована утечка газа. Детекторами могут быть детектированы любые утечки газа, которые происходят в пределах заштрихованных зон на фиг. 1 В,и могут быть вызваны подходящие аварийные сигналы. Со ссылкой на фиг. 2, 3 и 4 ультразвуковой детектор 10 утечки газа содержит корпус, который обычно изготавливается из алюминия LM 25 (или эквивалента) или нержавеющей стали 316 (или эквивалента). Детектор 10 имеет габаритные размеры около 247 мм высоты, 210 мм в диаметре и вес около 4,5 кг, если корпус сделан из алюминия, или около 12,5 кг, если корпус сделан из нержавеющей стали. Как таковой детектор 10 не является переносным устройством, т.е. предназначен для того, чтобы быть расположенным на месте эксплуатации в зафиксированном положении монтированием, например, на опору,или на стену, или на другую поверхность. Как видно более ясно из фиг. 4, корпус 12 содержит оконечную крышку 13 и оболочку 14 электроники, которая содержит верхнюю половину 15 и нижнюю половину 16, которые удерживаются вместе болтами 18, расположенными по окружности. Две половины 15 и 16 образуют внутреннее пространство детектора 10, в котором может быть размещена электроника, датчики, насос и другое оборудование, как описано ниже. Детектор 10 сконструирован, чтобы быть пригодным к использованию во взрывоопасных окружающих средах; по существу, корпус 12 удовлетворяет надлежащим стандартам безопасности (например, АТЕХ, CENELEC), а именно CENELEC ЕЕх, и все компоненты монтируются в пределах детектора 10, чтобы поддерживать защиту от проникновения посторонних сред (IP) и защиту во взрывоопасных зонах. Однако для изобретения не является необходимым, чтобы корпус был бы такого типа; принципы изобретения могут быть применены к детекторам, использующимся в безопасных окружающих средах. Четыре идентичных датчика 20 расположены по окружности внешней поверхности нижней части 16 корпуса 12. Конструкция каждого датчика 20 может быть такой, как описано ниже в этом варианте осуществления или как описано в варианте осуществления по фиг. 28. Со ссылкой на фиг. 3 и 4 каждый из датчиков находится на одной из осей, расположенных под углом 90, находящихся в окружности корпуса 16 датчика, и под углом 45 к продольной оси детектора 10. Съемная крышка 22, расположенная в центре нижней оконечности детектора 10, обеспечивает доступ к насосу, описанному подробнее ниже. Диагностический дисплейный экран 24 расположен на нижней половине 16 между двумя из датчиков 20 в целях технической поддержки. Сальники 26 входа кабеля обеспечивают доступ для кабелей питания и кабелей данных внутрь корпуса 12. Опорный зажим 25 допускает монтаж детектора 10 в зафиксированном положении на месте эксплуатации. Со ссылкой на фиг. 5 и 6 датчик 20 содержит пьезоэлектрический PZT цилиндр диаметром 5 мм и частотной толщиной 242 кГц 3%; датчик имеет накинутые серебряные электроды (не показаны) на каждой из двух плоских поверхностей цилиндра. Конкретный датчик такого размера, который был обнаружен для работы, продается Electro Ceramics Ltd. под номером по каталогу 9022/02011/026, сделан из материала, известного как PZT5A1 (вид цирконата-титоната свинца). Чтобы удовлетворять сертификации по безопасности, датчик 20 должен быть, за исключением электрической части датчика, размещен за пределами корпуса 12. Электрическое соединение каждого датчика 20 проходит через соответственный уплотненный проход 27. Будут пригодными и другие пьезоэлектрические измерительные преобразователи, имеющие другие формы и/или материалы (см., в частности, описание альтернативного варианта, предоставленного в отношении датчика 110 ниже). Выбор подходящего пьезоэлектрического измерительного преобразователя начинается с определения желаемого частотного диапазона для детектора 10. Типично это будет диапазон в пределах более низкого края ультразвуковой частотной полосы, такой как от 25 до 80 кГц, хотя возможны меньшие и большие диапазоны. Типично шум от утечки газа охватывает этот частотный диапазон, и другие проблемы, которые может детектировать детектор (как, например, изношенные подшипники), могут быть определены в пределах этого диапазона. После того как частотный диапазон был установлен, рекомендуется, чтобы пьезоэлектрический преобразователь выбирался с собственной частотой колебаний, находящейся за пределами этого диапазона; например, если желаемый диапазон детектора от 25 до 80 кГц, собственная частота должна быть больше чем 80 кГц. Цель этого состоит в том, чтобы по-9 019668 местить представляющий интерес частотный диапазон в приблизительно равномерную часть кривой частотной характеристики пьезо. Если собственная частота пьезоэлектрического преобразователя не может быть размещена за пределами частотного диапазона детектора, пьезо может быть все еще пригодным,хотя отклик может демпфироваться; это не рекомендуется. Подходящий размер для преобразователя может быть определен, как следует ниже. Диаметр в идеальном случае должен быть меньше, чем наименьшая длина волны в частотном диапазоне, или, по меньшей мере, меньше, чем длина волны центральной полосы для того, чтобы избежать эффектов чрезмерной направленности и выступов. Однако датчик в идеальном случае должен быть как можно большим для увеличения ответного сигнала по отношению к упомянутым параметрам. В этом примере длина волны должна быть 345/80000=4 мм при 80 кГц и 8 мм при 40 кГц; следовательно, диаметр должен быть выбран таким, чтобы быть приблизительно 4 мм или больше, но меньше чем 8 мм. Такая стратегия помогает устранить нули и выступающие максимумы на определенных углах. Длина измерительного преобразователя должна тогда быть как можно ближе к размеру диаметра; поэтому в этом случае пьезо может быть выбран диаметром 6 мм и длиной 6 мм. Не рекомендуется делать отношение длины к диаметру большим чем 2:1, чтобы избежать низкочастотных режимов вибрации. В то время как предпочтительно использовать пьезоэлектрические преобразователи, взамен может быть применен любой другой преобразователь, который может чувствовать звуковое давление на двух противоположных чувствительных поверхностях. Например, современные серийные микрофоны не удовлетворяют этому требованию, но могут быть адаптированы, чтобы удовлетворять ему. Чтобы дать возможность датчику 20 эффективно работать, он должен быть защищен от внешней вибрации и внутреннего шума. С этой целью пьезоэлектрический цилиндр заключается в материал 28, уменьшающий вибрацию, такой как сшитый пенополиэтилен; этот материал также может быть водонепроницаемым, чтобы соответствовать для условий окружающей среды. Все стороны пьезоэлектрического цилиндра покрываются материалом 28 за исключением внешне обращенной чувствительной поверхности 30 и части противоположной лицевой поверхности 31. В частности, материал 28, прилегающий к поверхности 31, содержит канал 33, который пропускает ультразвук для того, чтобы достигнуть поверхности 31 по воздушному пути от источника внутри детектора 10, как описано более подробно ниже. Чтобы уменьшить электрические помехи, датчик 20 и материал 28 монтируются в структуру 32 клетки Фарадея, выполненную из стали или электропроводного материала, которая также окружает все стороны датчика за исключением чувствительной поверхности 30. Структура 32 клетки Фарадея и ее содержимое образуют сборку датчика, которая монтируется в корпус 34 датчика при помощи соединителя 35. Сборка датчика является электрически изолированной от корпуса датчика материалами 36, 38 (сшитого пенополиэтилена). Покрывающая верхняя часть 40 датчика (выполненная из того же самого материала, как и корпус 12) удерживает сборку датчика и материал 36, 38 в корпусе 34 датчика. Покрывающая верхняя часть 40 датчика герметизирована от структуры клетки Фарадея уплотнителем 42 от окружающей среды. Уплотнитель 42 закрывает незащищенную лицевую поверхность датчика 20, чтобы защитить его от окружающей среды. Уплотнитель может содержать гибкую жестко затвердевающую резиновую смесь, которая перед затвердением является текучей и имеет низкую вязкость, чтобы позволить залить поверхностную секцию, и она приклеится к чувствительной поверхности 30 пьезоэлектрического диска. Смесь должна также быть электрическим изолятором, устойчивым к ультрафиолету, температурам и химикатам, которым будет подвергаться на месте эксплуатации. Жидкотекучая природа такой смеси перед загустением помогает уменьшить наличие воздушных карманов между уплотнением и чувствительной поверхностью 30. Подходящим типом смеси является вулканизирующийся при комнатной температуре кремнекаучук; например один, который был признан подходящим, это FLOWSIL FC, продаваемый Intek Adhesives Ltd. Смесь должна быть применена, используя подводящую линию для образования слоя между около 0,5 и 1 мм толщины по чувствительной поверхности 30, хотя и другие толщины являются возможными. Таким образом, зона внутри покрывающей верхней части 40 датчика герметизируется от окружающей среды, чтобы обеспечить нагрев или охлаждение в пределах корпуса 34 датчика, как описано более подробно ниже. Уплотнитель 42 воздействует на амплитудно-частотные характеристики пьезоэлектрического преобразователя, хотя было выяснено, что использование смеси, как описано выше, с относительной плотностью между 1 и 1,5 г/мл вызывает незначительную потерю производительности. Чтобы проверить характеристики чувствительности, датчик 20 калибруется во время изготовления, используя известный источник звука на известном расстоянии от датчика 20 в пяти точках по ширине частотного диапазона детектора 10. Начало отсчета и усиление тогда подстраиваются, чтобы попадать в установленные пределы. Сигнальный кабель (не показан) проходит через герметизированный проход 27 и электрически соединен с двумя электродами датчика 20. Другой конец кабеля соединен с предварительным усилителем снаружи корпуса 12. Сигнальный кабель должен быть сконфигурирован как можно более коротким, чтобы уменьшить электрические помехи. Если детектор 10 используется на месте эксплуатации, подвергаясь воздействию окружающей среды, в относительно холодном климате, жидкость может сосредоточиться на чувствительной поверхности 30 и может замерзнуть. Это является нежелательным, так как это будет изменять характеристики чувствительности датчика 20. Чтобы препятствовать такому замерзанию, покрывающая верхняя часть 40 датчика и корпус 34 датчика могут подогреваться посредством теплопроводности и/или конвекции нагревательным стержнем для эксплуатирования чувствительной поверхности 30 выше точки замерзания. Со ссылкой на фиг. 7 нагревательный стрежень 44 проходит в и через внутреннее пространство датчика 34 к его дальнему концу, соприкасаясь с покрывающей верхней частью 40 датчика. Нагревательный стрежень 44 содержит цилиндрический стержень 46, имеющий проходящий через него внутренний канал без выхода наружу с одной стороны; стержень 46 содержит тот же самый материал, что и корпус 12. Открытый конец стержня 46 соединен с корпусом 12 и с его внутренним содержимым. Таким образом, поддерживается объединение с корпусом 12. Сердцевина 48 содержит полый цилиндр, вокруг которого намотана нагревательная лента 50. В оконечной части стержня 46 свободный конец провода нагревательной ленты 50 проходит через открытую полость для электрического соединения в пределах внутренней области корпуса 12. Температурный датчик 52 содержит пустотелый цилиндрический стержень 54, один конец которого расположен в пределах внутренней области корпуса 34 датчика, а другой конец соединен с корпусом 12. Температурный датчик смонтирован на свободном конце стрежня 54 для отслеживания температуры внутреннего пространства корпуса 34 датчика. Провода (не показаны) проходят сквозь внутреннюю область стержня 54 и соединяют температурный датчик 56 с электронными цепями во внутренней области корпуса 12. Подобные части могут быть использованы для подогрева насосного отделения. Снова со ссылкой на фиг. 5, диафрагменный насос 60 размещен в насосном отделении 62 за пределами основной оболочки, предоставленной корпусом 12, для того, чтобы удовлетворять сертификационным требованиям по безопасности. Однако если приняты правильные меры предосторожности, насос 60 может быть размещен внутри корпуса 12. В альтернативном варианте насос может быть замещен механизмом подачи воздуха, если таковой имеется в распоряжении на месте эксплуатации. В этом случае насос 60 должен быть замещен соединителем переборок и клапаном для контроля потока. Доступ к насосу обеспечивается съемной крышкой 22. Выходное отверстие из насоса 60 соединяется посредством металлических труб 63 (уменьшающихся от 3 мм внутреннего диаметра к 1,5 мм внутреннего диаметра) с соответствующим соплом 64 в каждом корпусе 34 датчика. Сопло 64 также можно увидеть на фиг. 7. Сопло 64 находится в пределах пространства, окруженного корпусом 34 датчика, и, следовательно, расположено за чувствительной лицевой поверхностью 30 датчика 20. В этом варианте осуществления центр сопла 64 расположен около 8 мм за чувствительной лицевой поверхностью 30 и около 6 мм от ее центра. Однако сопло 64 может быть расположено где угодно в пределах пространства внутри корпуса 34 датчика, если только при использовании уровень звукового давления является достаточно высоким на противоположной поверхности 31 пьезоэлектрического преобразователя. Со ссылкой на фиг. 8 А, 8 В, 8 С и 8D сопло 64 содержит трубку, которая сплюснута для того, чтобы образовывать дроссель 65. Конец трубки обжат для образования щели 66, имеющей длину около 0,9 мм,ширину около 0,05 мм и глубину около 0,3 мм. Такая форма дросселя 65 может быть достигнута, например, обжатием или ковкой. При использовании воздух выводится насосом 60 через трубу 63 и сопло 64. Влияние формы дросселя 65 на воздушный поток (в частности, только расширение выше по потоку от сопла 64) вызывает широкополосный звуковой сигнал, который включает в себя широкополосную составляющую в ультразвуковом диапазоне спектра. Таким образом, преобразователь при условии использования генерирует широкополосный ультразвуковой сигнал. В этом варианте осуществления дроссель указывает на устройство, которое создает условие сдавленного потока, вызванное эффектом Вентури. Дроссель выводит воздух, находящийся под избыточным давлением, от насоса 60 через сужение в окружающую среду с более низким давлением, где скорость должна увеличиваться, чтобы удовлетворять уравнению непрерывности. Используя эффект Вентури,когда достигается состояние сдавленного потока, скорость достигает скорости звука и производит ультразвуковой шум. Установившееся состояние сдавленного потока осуществляется, когда отношение абсолютного давления выше по потоку к абсолютному давлению ниже по потоку равно или больше чем где k - определенное температурное отношение газа. Вычисления показывают, что уровень давления потока со звуковой скоростью или ультразвуковой скоростью будет возникать, когда отношение между давлением выше по потоку к внешнему давлению(атмосферы) 1,89 (для воздуха); однако ультразвуковое давление может быть осуществлено уже с отношением 1,5 давления выше по потоку к давлению ниже по потоку и будет также меняться, когда другой газ присутствует в потоке, находящимся под давлением. Использования различных давлений выше по потоку и зон поперечных сечений ограничения могут изменять уровень ультразвукового шума, производимого для того, чтобы соответствовать применению. Важно поддерживать ширину ограничения у минимального значения, которое наиболее эффективно как острый край ножа или заостренная кромка, но этого могут не допустить технологии производства и стоимость. Использование различных форм и толщин сечений наряду с изменениями давлений перед сечением делает возможным изменять доминантные частоты производимого ультразвукового шума, если необходимо, но результат на выходе будет все-таки преимущественно широкополосным. В некоторых вариантах осуществления дроссель 65 может содержать пластину дросселя или пластину отверстия, которая вставляется в трубку, чтобы образовать ограничение. Фиг. 8D показывает пример способа, как может быть сконструирован дроссель 65 на основе внешнего диаметраметаллической трубы 63. В частности, отверстие (в этом примере круглое отверстие) сопла имеет внутренний диаметр, который составляет половину внешнего диаметра трубы 63. Длина узкого конца задается как одна десятая внешнего диаметра трубы 63. Фиг. 8 Е показывает частотный спектр, производимый соплом 64, когда воздух при 2105 Нм-2 (2,0 бар) подается к нему насосом 60. Спектр был измерен на расстоянии 4 м и под углом 90 к продольной оси сопла 64. Как можно увидеть, спектр имеет широкополосную характеристику в интересующем диапазоне (например, от 25 до 80 кГц) без присутствия единственной доминантной частоты. Было чрезвычайно неожиданно увидеть, насколько равномерным является частотный спектр. Это является особенно полезным в целях калибровки, поскольку схемы усиления не требуют адаптации для того, чтобы иметь дело с частотами резко меняющихся интенсивностей в поперечном направлении частотного диапазона. Насколько знает и понимает заявитель, не существует строгого определения "широкополосного" сигнала. Специалисты в данной области техники часто используют термины "широкополосный" и "узкополосный" и, кажется, способны передавать адекватное значение при использовании этих терминов. Кажется, что данные примеры конкретных сигналов специалист в данной области техники может поместить каждый и в одну, и в другую категорию, не опираясь на строгое определение. Во многих случаях для специалиста в данной области техники будет ясно, что сигнал является широкополосным сигналом при исследовании его частотного спектра. Придерживаясь такого исследования, если для специалиста в данной области техники не ясно, является ли конкретный сигнал широкополосным или нет, расчет может быть сделан на одном из следующих определений:(1) широкополосный сигнал является любым сигналом, имеющим частотный спектр, который не классифицирован как узкополосный сигнал; если это не ясно, тогда(2) широкополосным сигналом является любой сигнал, имеющий ширину полосы частот больше чем одна третья октавы, где центральная частота f0 сигнала используется как центральная частота октавы. Верхняя f1 и нижняя f2 предельные частоты одной октавы задаются как и ширина полосы октавы задается как f2-f1. Отношение верхней к нижней предельной частоте может быть выражено как где k=1/3 для одной трети октавы и k=1 для одной октавы. Ширина полосы одной третьей октавы тогда задается как Этот результат может быть сравнен по отношению к ширине полосы сигнала: если ширина полосы одной трети октавы меньше чем ширина полосы сигнала, сигнал может быть назван как широкополосный. В качестве примера сигнал с центральной частотой 40 кГц может быть классифицирован как узкополосный, как следует ниже. Для центральной частоты 40 кГц верхняя и нижняя предельные частоты для одной октавы следующие: Следовательно, нижний предел для диапазона одной третьей октавы такой и верхний предел для диапазона одной третьей октавы такой Следовательно, узкополосный сигнал с центральной частотой 40 кГц имеет ширину полос не больше чем 9,263 кГц. Любой сигнал с более широкой шириной полосы может быть классифицирован как широкополосный. Будет принято во внимание, что существует много других способов для вырабатывания широкополосного ультразвукового шума. Например, дроссель 65 может иметь круглую, овальную, квадратную или другую предоставленную форму, дроссель представляет ограничение для воздушного потока, покидающего трубку 62. Сопло 64 может также быть подстроено по отношению к выпускной части дросселя 65; в частности, внешняя кромка окружности щели 66 может быть загнута вовнутрь, например. Может быть сделана вставка подходящей формы, например, из металла или пластика для того, чтобы быть вставленной в трубку 62. Другой альтернативный вариант узкого конца заключается в предоставлении ограничения в трубке 62. Количество ультразвукового широкополосного шума может быть увеличено повышением отношения окружности щели 66, по которой течет поток (в данном примере окружности отверстия) к площади поверхности дросселя (определенного как окружность отверстия, умноженная на длину дросселя - длина в этом примера равна 0,3 мм). В одном примере давление у дросселя 65 было определено, как равное 2105 Нм-2 (2,0 бар), что вызвало уровень звукового давления в 95 дБ на расстоянии 50 мм перпендикулярном плоскости окружности 66, по которой протекает поток. На практике рекомендуется, чтобы давление 0,35105 Нм-2 (0,35 бар) являлось минимальным значением, достигаемым в насосе 60, и по меньшей мере на 0,05105 Нм-2 (0,05 бар) выше достигалось в или прямо перед сужением узкого конца 65; более высокие давления являются преимущественными и могут быть скорректированы для того, чтобы соответствовать конкретному фоновому шуму окружающей среды, в которой будет располагаться детектор 10. В окружающих средах, где вероятно должен быть размещен детектор 10, уровень фонового звукового давления часто лежит в диапазоне от 74 до 84 дБ у датчика 20, хотя известны и более высокие уровни. Современные положения регламентируют, что для целей теста и калибровки, тестовый источник должен достигать уровня звукового давления по меньшей мере на 6 дБ выше фонового у датчика 20. Соответственно, дроссель 65, насос 60 и система трубок 62 должны быть выбраны и сконструированы так,чтобы предоставлять уровень звукового давления предпочтительно по меньшей мере 80 дБ, а более предпочтительно по меньшей мере 90 дБ у датчика 20. Конечно, если фоновый уровень ниже, форма узкого конца 65, и/или давление насоса, и/или расстояние между узким концом 65 и датчиком 20 может быть скорректировано для генерирования более низкого уровня звукового давления у датчика 20. При использовании насос 60 проводит забор воздуха из насосного отделения 62 и накачивает его в корпус 34 датчика через дроссель 65. Соответственно, требуется путь для снижения давления для гарантии постоянной работоспособности уплотнений от окружающей среды. В стенке корпуса 34 датчика выполнен проход 70, который выходит в насосное отделение 62. Насосное отделение 62 содержит водостойкую воздухопроницаемую мембрану 72, которая выходит во внешнюю окружающую среду. Таким образом, воздух, закачанный в корпус датчика, может быть выведен для предотвращения наращивания давления. Насосное отделение 62 также обеспечено подобным нагревательным стержнем и температурным датчиком, как и у корпуса 34 датчика. Это допускает индивидуальное управление температурой и для пространства внутри корпуса 34 датчика, и для насосного отделения 62. Соответственно, воздух в насосном отделении 62 может быть подогрет перед тем, как быть закачанным в корпус 34 датчика для уменьшения отклонения датчика, вызванного теплым или холодным воздухом. Если детектор 10 используется в экстремальных окружающих средах, насос 60 может проводить забор воздуха снаружи корпуса 12 через воздуховпускную трубку; эта трубка может подогреваться или охлаждаться, если требуется. Вместо одного сопла, связанного с каждым датчиком, было бы возможно иметь единственное сопло около насоса и передавать широкополосный ультразвуковой сигнал в окрестность каждого датчика, например, используя трубы. Фиг. 9 показывает электронные схемы 78, использующиеся для приема и обработки сигнала от каждого датчика 20. Выходным результатом каждого датчика 20 типично является быстро изменяющийся сигнал, представляющий уровень звукового давления у чувствительной поверхности 30; сигнал усиливается схемой 80 малошумящего предусилителя. Затем сигнал колеблется между около 10 мкВ и 1 В, соответствуя уровню звукового давления между 50 и 150 дБ соответственно. Сигнал затем проходит через объединение схем фильтров 82 высоких и низких частот и усилитель 84 с программируемым коэффициентом усиления. Фильтр высоких частот удаляет частоты ниже около 25 кГц, а фильтр низких частот удаляет частоты выше около 80 кГц. Это приводит сигнал к содержанию полосы частот в интересующем диапазоне, т.е. около 25-80 кГц. Сигнал затем вводится в схему 84 усилителя с программируемым коэффициентом усиления, установленную для усилений сигнала, так что уровень звукового давления 50 дБ у датчика 20 соответствует уровню напряжения около 0,1 мВ, а уровень звукового давления 150 дБ уровню напряжения около 100 мВ. Оттуда сигнал выпрямляется и преобразуется из линейной в логарифмическую шкалу схемой 86 линейно-логарифмического преобразователя. Сигнал затем дискретизируется при 25 Гц при помощи АЦП 88, и отсчеты вводятся в микроконтроллер 90 (такой как Intel 8051). Микроконтроллер 90 сохраняет отсчеты в памяти (например, ОЗУ (RAM, которые должны быть обработаны, как описано ниже. Микроконтроллер 90 также управляет изменяющимся усилением (или автомасштабированием). В частности,если микроконтроллер детектирует относительно большой сигнал около верхней части его текущего установленного диапазона, он уменьшает усиление усилителя, например, в десять раз и затем компенсиру- 13019668 ет результирующую измеренную амплитуду в цифровой форме. Это выполняется, так как необходимо несколько раз охватывать желаемый полный диапазон амплитуд звуковых колебаний (в этом случае от 50 до 150 дБ). Изменяющееся усиление увеличивается, если уровень звукового давления последовательно понижается. Вслед за обработкой отсчетов микроконтроллер выводит выбранные отсчеты и/или результаты, полученные из отсчетов к ЦАП 92. Аналоговый сигнал затем применяется в управлении 4-20 мА, которое производит и выводит сигналы для передачи к центральному блоку управления (не показан) куда-нибудь в нужное место на предприятии. Отслеживание и принудительный тест Под управлением микроконтроллера 90 детектор 10 выполняет самотестирование для каждого датчика 20 на предопределенных интервалах. Самотестирование выполняется либо используя уровень фонового шума, либо, если он не может быть детектирован, принудительной воздушной струей, проходящей через сопло 64, ассоциативно связанное с каждым датчиком 20. Воздушная струя генерирует широкополосный ультразвуковой сигнал и повторяет на систематических интервалах, пока уровень фонового шума не поднимется до детектируемого уровня снова. Конечно, возможно использовать только принудительный тест, какой бы ни был уровень фонового звукового давления (если только фон не является более"громким", чем принудительный тест). Со ссылкой на фиг. 10 проиллюстрирована блок-схема последовательности этапов в способе самотестирования для единственного датчика 20. На этапе S9-1 микроконтроллер проверяет, существует или нет сигнал от датчика 20. Это может быть выполнено соответствующим логическим импульсом, который указывает, существуют ли в настоящий момент любые выходные сигналы от линейно-логарифмического преобразователя 86. Если выходные сигналы существуют (указывающие достаточный уровень фонового шума), микроконтроллер 90 на этапе S9-2 читает данные датчика, сохраненные в памяти. Затем микроконтроллер 90 определяет среднее арифметическое отсчетов, сохраненных в памяти, и отравляет результат к диагностическому дисплейному экрану 24. Может быть применена необязательная задержка в 2-3 с для отображения среднего значения. Таким образом, только одно среднее значение показывается каждые 2-3 с, что помогает уменьшить быструю смену отображаемых значений и, следовательно, улучшает читабельность. Если на этапе S9-1 не существует сигнала от датчика 20, микроконтроллер 90 сначала проверяет,истек ли предопределенный период (например, 15 мин) либо со времени последнего принудительного теста, либо со времени, пока фоновый сигнал не был детектирован. Если предопределенный период истек, микроконтроллер 90 инициирует принудительный тест, в котором активируется насос 60 для выведения воздушной струи через сопло 64. Выведение воздушной струи продолжается на период времени,достаточный для того, чтобы дать возможность собрать данные от датчика 20 и проанализировать микроконтроллером 90; подходящий период для воздушной струи составляет около 5 с, хотя возможны более длинные или более короткие периоды времени. Чтобы дать возможность проведения принудительного теста в условиях высокого фонового шума тестовый сигнал у датчика 20 должен быть большего уровня, чем уровень фонового шума. Выходное давление от насоса 60 может быть скорректировано, чтобы соответствовать конкретным фоновым уровням, хотя рекомендуется, чтобы были установлены заводские значения по умолчанию, так что у датчика 20 достигается +90 дБ. Другой возможностью для микроконтроллера 90 было бы последовательное увеличение давления на выходе насоса (управлением применяемого напряжения), если тестовый сигнал не регистрируется. Это может продолжаться вплоть до максимума; если тестовый сигнал не регистрируется, тогда указывают дефект. Конечно, во время излучения тестового сигнала детектор 10 будет "глухим" для утечек газа; следовательно, рекомендуется, чтобы продолжительность теста сводилась к минимуму, требуемому для теста правильного функционирования. На этапе S9-3 микроконтроллер 90 проверяет, осуществляется ли принудительный тест в данный момент времени или нет. Если да, микроконтроллер 90 исследует данные, хранимые в памяти, и усредняет эти данные за определенный период (например, 0,5 или 1 с) для получения среднего уровня звукового давления у датчика 20. Это среднее значение затем сравнивается на этапе S9-4 с настоящим пороговым уровнем, который сохраняется в памяти микроконтроллера во время изготовления (обычный порог аварийного сигнала временно исключается для датчика на время продолжительности теста). Например,настоящий порог может быть сохранен как 89 дБ. Соответственно во время принудительного теста для датчика необходимо выводить сигнал, представляющий 89 дБ или больше. Если чувствительная лицевая поверхность 30 становится загрязненной инородными веществами (лед, песок, нефть и т.д.), выходной результат от датчика 30 во время принудительного теста будет сокращаться по причине изменения в вибрационных свойствах датчика. Если выходной сигнал меньше, чем настоящий порог, способу позволяется повторить перепроверку вывода, после чего вызывается состояние отказа на этапе S9-5 и подходящий сигнал может быть отправлен через интерфейс 4-20 мА. Если выходной сигнал превышает настоящий порог, способ возвращается к началу на этап S9-6. Такая проверка повторяется для времени продолжительности принудительного теста. Если на этапе S9-3 принудительный тест не находится в процессе реализации, микроконтроллер 90 усредняет значения данных датчика, сохраненные в памяти, для получения значения, представляющего средний уровень звукового давления у датчика 20 на протяжении заданного временного периода (например, 1 с). Среднее значение затем сравнивают на этапе S9-7 с пороговым уровнем аварийного сигнала,сохраненным в памяти. Если среднее значение не больше, чем порог аварийного сигнала, способ возвращается к началу. Однако если среднее значение больше, чем порог аварийного сигнала, на этапе S9-8 запускается таймер для предоставления функции задержки, типично 15 с, но может быть 30 с или 60 с в зависимости от расположения детектора. Временная задержка необходима для гарантии того, что детектор 10 не вызывает аварийные сигналы, когда происходят регулярные процессы (например, сброс давления с предохранительного клапана) в пределах отслеживаемой зоны. Если наступает время окончания временной задержки на этапе S9-9, а среднее значение уровня звукового давления все еще находится выше порога аварийного сигнала, вызывают аварийный сигнал на этапе S9-10, и микроконтроллер 90 генерирует соответствующие выходные сигналы на этапе S9-11, как, например, активирование слышимых и видимых аварийных сигналов, и вызывает запуск аварийного сигнала на удаленных положениях для предупреждения оператора предприятия. Некоторые преимущества широкополосного ультразвукового сигнала включают в себя более высокую надежность в результате самотестирования; датчик тестируется на всем протяжении частотного диапазона, а не только на узком участке согласно способам предыдущего уровня техники; поскольку преобразователь (например, сопло 64) находится внутри корпуса детектора, самотестирование менее восприимчиво к изменениям в окружающей среде, таким как температура и влажность; и преобразователь не блокирует никакой части зоны чувствительности датчика. Даже если широкополосный ультразвуковой сигнал должен был издаваться внешне по отношению к детектору, широкополосная природа сигнала означает, что изменения в температуре и влажности окружающей среды способны меньше воздействовать на точность самотестирования. Детектор 10 может быть обеспечен одним или более датчиками 20. Когда в детекторе 10 существует больше чем один датчик 20, функции отслеживания и принудительного теста выполняются подобным образом. В частности, на фиг. 9 схема селектора головки размещена между датчиками 20 и малошумящим предусилителем 80. Схема селектора головки используется для выбора результата на выходе датчиков 20 в качестве входных данных в схему 80 малошумящего предусилителя. Схема селектора головки содержит интегрированную аналоговую схему мультиплексора (такую как 74 НС 4051, доступную для приобретения от NXP Semiconductors), которая используется для чередования выбора выходного результата от датчиков в последовательном и непрерывных циклах. Например, каждый датчик может быть выбран в период 40 мс, в течение этого времени способ фиг. 10 выполняется на этих выходных данных. Как только время истекает, выбираются выходные данные следующего датчика и т.д. Во время принудительного теста микроконтроллер 90 использует электромагнитные клапаны (не показаны) для отведения воздушного потока от насоса 60 к подходящему соплу 64, граничному с датчиком, который должен быть протестирован. Схема селектора головки продолжает переключение от выходных данных одного датчика к другому. Таким образом, пока один датчик является объектом принудительного теста, оставшиеся три могут быть все еще использованы для прослушивания утечки газа. Как только время продолжительности принудительного теста истекает, микроконтроллер приводит в порядок электромагнитные клапаны для отведения воздушного потока к следующему датчику 20. Таким образом, все четыре датчика 20 являются объектами для принудительного теста. Соответствующая диаграмма последовательности операций способа, иллюстрирующая отслеживание и принудительный тест для многоголовочного детектора, показана на фиг. 11. Калибровка Одна конкретная проблема с детекторами утечки газа состоит в поддерживании заводских калибровочных настроек с тем, чтобы, например, уровень звукового давления 90 дБ при 50 кГц у датчика производил выходные сигналы 901 дБ при 50 кГц от микроконтроллера. Соответственно, микроконтроллер 90 запрограммирован для инициирования периодической проверки калибровки каждого датчика и электронной схемы 78. Это может происходить каждые несколько недель или месяцев, по желанию, и может быть определено на месте эксплуатации во время установки. Во время изготовления детектора 10 каждый датчик калибруется, используя ультразвуковой источник с известной частотой и известный уровень звукового давления на определенном расстоянии. Датчик размещается на расстоянии, и звуковой источник активируется. Выходные сигналы от электронной схемы 78 затем корректируются с тем, чтобы выходные сигналы от микроконтроллера соответствовали ожидаемому уровню дБ на этой частоте. Последовательность операций затем повторяется для различных частот в полосе. Может быть откалибровано столько частот, сколько полагается необходимым, таким образом, хотя рекомендуется как минимум три, разбросанных по полосе, например 25, 52 и 80 кГц. Уровни калибровки затем устанавливаются и сохраняются в микроконтроллере 90. Это достигается при использовании насоса 60 для вывода воздуха через каждое сопло 64 при известном уровне давления(например, 2105 Па, т.е. 2 бар). Сигнал от ассоциативно связанного датчика 20 обрабатывается, и выходной уровень звука в дБ при различных частотах сохраняется в памяти микроконтроллера 90. Рекомендуется, чтобы уровень звукового давления при каждой частоте был бы 90 дБ, а предпочтительно по меньшей мере 95 дБ. Это гарантирует то, что тест калибровки может быть выполнен практически в са- 15019668 мых шумных окружающих средах. Должно быть замечено, что не является важным, чтобы выходные сигналы от датчика представляли точный уровень дБ. По причине незначительных изменений в форме каждого сопла 64 записанный уровень дБ вероятно будет различаться для каждого, даже если одинаковое давление воздуха доставляется от насоса 60 к соплу. Как только схема 78 была откалибрована для известного источника, является важным записать уровень дБ, детектированный при конкретном давлении воздуха, доставляемом насосом 60. Детектор 10 содержит настроечную схему (не показана), которая отправляет сигнал к линейнологарифмическому преобразователю 86. Настроечная схема содержит конденсатор с электронной регулировкой, который разрешает микроконтроллеру 90 корректировать резонансную частоту настроечной схемы. Таким образом, микроконтроллер 90 может испытывать любую часть полосы частот детектора 10. Для того чтобы выполнить тест калибровки, микроконтроллер 90 сначала выбирает датчик, который должен быть протестирован, а затем выбирает некоторое количество разных частот в пределах полосы детектора из группы частот, где детектор 10 был откалиброван во время изготовления. Из этой группы может быть выбрано столько точек, сколько полагается необходимым, хотя рекомендуется как минимум три. Более того, точки должны охватывать интересующий частотный диапазон; например частоты 25, 52 и 80 кГц. Как только настроечная схема была настроена на конкретную частоту, микроконтроллер 90 инициирует насос выдать на выходе то же самое давление, как и при изготовлении, в этом случае 2105 Па, и для воздушной струи устанавливается время длительности в 5 с. Микроконтроллер 90 ищет в памяти предполагаемый уровень звукового давления на этой частоте и сравнивает его с уровнем,принятым от электронной схемы 78. В том случае если принятый уровень находится в пределах предопределенного допуска (например, 5 дБ) от уровня, сохраненного в памяти, тест калибровки для этой частоты выдерживается. Тот же самый тест затем повторяется для оставшихся частот в диапазоне, пока не будет завершено все. Если тест выдерживается для всех частот, микроконтроллер 90 переходит к тесту следующего датчика. Во время калибровочного тестирования датчик будет "глухим" (хотя любые другие датчики в детекторе продолжают работать). Следовательно, и количество тестируемых частот, и время воздушной струи для каждой частоты может быть скорректировано для того, чтобы удовлетворять требованиям конкретной установки. Если тест калибровки указывает, что детектор 10 вышел за пределы заводских параметров, детектор повторно тестируется некоторое количество раз (например, два или три) для проверки ответа. Если детектор не выдерживает этого количества тестов калибровки, регистрируется состояние отказа. Для принудительного теста и теста калибровки рекомендуется, чтобы минимальное давление 0,35105 Нм-2 (0,35 бар) достигалось около насоса 60 и по меньшей мере на 0,05105 Нм-2 (0,05 бар) выше достигалось у сопла 64, хотя более высокие давления являются выгодными. Тест калибровки будет установлен в соответствии с существующим расписанием технического обслуживания на месте эксплуатации. Одно конкретное преимущество в том, что тест калибровки является полностью автономным в пределах детектора; следовательно, нет необходимости в возвращении детектора на завод или для получения доступа к чувствительной лицевой поверхности 30 каждого датчика 20 обслуживающим персоналом. Также ожидается, что уровни допусков при тесте калибровки могут быть улучшены. В частности, современные калибровочные допуски составляют 5 дБ при использовании переносных устройств. Поскольку сопло 64 в пределах корпуса детектора и насосное давление могут быть управляемыми, предполагается, что эти допуски могут быть улучшены до всего 1 дБ или возможно лучше. Это является главным преимуществом, поскольку любое отклонение в производительности детектора будет идентифицировано быстрее, улучшая безопасность на месте эксплуатации. Направление Для улучшения функциональности детектора 10, сигналы, полученные от множественных датчиков, сравниваются микроконтроллером 90 для предоставления указания направления утечки газа. Со ссылкой на фиг. 12 данные собираются и обрабатываются от каждого датчика 20 способом, описанным выше со ссылкой на фиг. 11. Если на этапе S12-1 микроконтроллер 90 определяет, что порог аварийного сигнала был превышен, данные собираются из памяти для всех датчиков 20. Данные затем сравниваются на этапе S12-2 для нахождения двух наивысших уровней звукового давления для идентификации двух датчиков 20, наиболее близко расположенных от утечки газа. Уровень фонового шума вычитается от каждого из двух наивысших значений. Направление утечки газа относительно детектора 10 на этапе S12-3 может быть определено сравнением относительного увеличения от двух датчиков выше фона. Например, со ссылкой на фиг. 13 два датчика, идентифицированные как А и В, показаны в плоскости на их относительных местоположениях на корпусе детектора. Два датчика расположены на известном угловом разнесении, в этом примере 90. В грубом приближении, если утечка газа находится прямо напротив датчика А на фиг. 13, этот датчик будет регистрировать полноценное увеличение в уровне звукового давления относительно фона, в то время как датчик В будет регистрировать относительно небольшое. Так как угловое местоположение утечки газа изменяется от расположенного напротив датчика А к расположенному напротив датчику В, уровень звукового давления у датчика А будет уменьшаться,между тем как уровень звукового давления у В будет понемногу увеличиваться в той же самой пропорции. При местоположении в 45 уровни звуковых давлений измеренных А и В будут приблизительно одинаковыми. Соответственно, может быть рассмотрено место 90, где утечка газа в местоположении при 45 равно 0%, т.е. ни по направлению к А, ни по направлению к В. С того положения увеличение пропорционально сигнала между 45 и 0 (т.е. напротив А) может быть представлено в терминах процентного отношения, сравнивая относительное увеличение уровней звукового давления у А и В. Подобным образом, увеличение в пропорции сигналам между 45 и 90 (т.е. напротив В) может быть представлено в тех же терминах процентного отношения. Для получения приблизительного углового местоположения утечки газа между датчиками А и В микроконтроллер получает отношение наименьшего увеличения поверх фона к наибольшему увеличению поверх фона двух датчиков. Отношение может быть превращено в проценты и вычтено от датчика с наибольшим увеличением поверх фона. Это затем указывает угловое местоположение утечки газа по отношению к датчику, который регистрирует наибольшее увеличение поверх фонового шума. Например, уровень фона 50 дБ датчик А регистрирует 70 дБ и датчик В регистрирует 60 дБ. Относительные повышения поверх фона тогда А=20 дБ,В=10 дБ. Отношение наименьшего к наибольшему повышению в этом случае В/А=10/20=50%. Угловое положение от датчика, которое регистрирует сильнейший сигнал (в этом случае А), задается как 10050%=50% углового расстояния между А и положением равновесия (соответствующему 45). Следовательно, утечка газа лежит под углом около 22-23 от А. Эти этапы по вычислению могут либо быть выполнены микроконтроллером 90 каждый раз, когда детектируется утечка газа, либо в памяти микроконтроллера может быть сохранена предварительно вычисленная таблица, как, например, ниже Чем больше значений сохраняется в таблице, тем более точное будет указание. Конечно, может быть достаточно просто указать диапазон углов, для которых ожидается, что там находится утечка газа. В этом случае таблица может требовать только четыре записи, как показано выше. Как только на этапе S12-4 было определено направление утечки газа, является также возможным передать результат к удаленному компьютерному терминалу для отображения на экране на этапе S12-5. Фиг. 14 иллюстрирует вид изображения, который может быть отображен пользователю. При осуществлении этого оператору может быть необходимо завершить только один или два процесса для предприятия, вместо того чтобы завершать все процессы сразу. Количество используемых датчиков для определения направления утечки газа действует на точность результата: два датчика обеспечат грубое местоположение, например, слева или справа без представления о силе; три датчика дадут возможность микропроцессору выполнить триангуляцию; еще больше датчиков может быть добавлено в вычисление для улучшения точности. Могут быть использованы другие способы для точного определения положения множеством датчиков, как, например, сравнение фазы гармонического колебания, например, у поверхности датчика; это даст возможность уменьшить требуемое количество датчиков. Вертикальное или горизонтальное смещение датчиков на детекторе также даст возможность значительной степени точности. Другой способ предлагает поворот детектора(или его части) вокруг вертикальной оси с тем, чтобы датчик мог поворачиваться по направлению к утечке газа, пока сигнал не станет самым сильным. Одно преимущество этого в том, что только один датчик требуется на детекторе. Покрытие в 360 может быть получено вращением датчика на протяжении заданного периода времени, например один раз каждые 60 с. Когда используются множественные датчики, является важным, чтобы углы детектирования перекрывались (например, как показано на фиг. 15), чтобы гарантировать, что не существует "глухих пятен" в зоне действия. Также является полезным сохранять чувствительные поверхности 30 при угловом смещении (45, показанном на фиг. 3) для того, чтобы избежать "расхождений" в откликах между датчиками. Угол отклика (AR) датчика обычно предписывает, сколько датчиков требуется, как минимум, для отслеживания интересующей зоны. Угол отклика также обуславливает угол наклона чувствительных поверхностей для обеспечения перекрытия для того, чтобы избежать "глухих пятен". Удаление частот Наиболее значительный шум, производимый в промышленной окружающей среде, находится в пределах звукового диапазона (25 кГц), как показано на фиг. 16. Когда газ дает утечку из зоны, находящейся под давлением, в атмосферу, он производит более отчетливый широкополосный спектр, как показано в примере на фиг. 17. По этой причине современные виды неподвижных ультразвуковых детекторов обычно работают на частотах только в ультразвуковом диапазоне обычно от 25 до 80 кГц, как показано вертикальными линиями 100, 102 на фиг. 18. Уровни аварийного сигнала детектора устанавливаются на основе уровня фонового шума, установленного в рабочем частотном диапазоне. Уровень аварийного сигнала находится в области на 6 дБ выше,чем пиковый фоновый шум. Фиг. 19 показывает значения для типичного фона с заштрихованной зоной,представляющей покрытие детектора от 25 до 80 кГц и уровень 104 аварийного сигнала шума, установленный в 39 дБ. Как будет видно на фиг. 19, высвобождение газа под давлением заставило частоты достаточной величины попасть в заштрихованную зону, таким образом, вызывая запуск аварийного сигнала. Как объяснено выше, обычно используется задержка перед запуском аварийного сигнала для уменьшения возможности срабатывания аварийного сигнала, вызванной скачкообразными шумовыми выбросами. Задержка составляет типично от 5 с до нескольких минут в зависимости от условий места эксплуатации. Фиг. 20 показывает типичную фоновую среду, которая содержит непрерывный нежелательный шумовой выброс 106, производимый не газом, высвобождающимся под давлением. В этом примере выброс вызван аварийным подшипником в работе машинного оборудования. Фоновый шум будет очень высоким и длительным в этом случае для того, чтобы обеспечивать безопасное использование ультразвукового детектора; может быть использован детектор, но безопасное чувствительное расстояние будет значительно уменьшено. При использовании электронных фильтров (например, одного или более полосовых режекторных фильтров) возможно удалить один или более нежелательных частотных диапазонов за пределы диапазона детектирования. Со ссылкой на фиг. 21 показан способ удаления частот, выполняемый детектором. Первая часть способа подобна той, которая описана выше, в которой микроконтроллер 90 собирает данные от датчика и определяет, превышает ли уровень звукового давления всей полосы частот (25-80 кГц) порог аварийного сигнала (этап S13-1). Если порог превышается, микроконтроллер использует вышеупомянутую настроечную схему для подъема (или снижения) частотного диапазона для определения,существуют или нет любые выбросы ультразвукового шума. В частности, на этапе S13-2 микроконтроллер исследует каждую частоту по очереди и определяет, находится или нет уровень звукового давления для этой частоты выше порога аварийного сигнала. Если да, частота сохраняется и исследуется следующая частота. Если нет, микроконтроллер просто переходит к следующей частоте. Хранение частотных значений выше порога аварийного сигнала дает возможность микроконтроллеру определить итоговую "ширину полос аварийного сигнала", который находится выше порога аварийного сигнала. Ширина полос аварийного сигнала затем сравнивается с шириной полос детектора на этапе S13-3 для определения, какое процентное отношение полного диапазона она представляет. Микроконтроллер 90 сохраняет "частотное процентное отношение порогового значения" (FPTV) в памяти по отношению к той ширине полос аварийного сигнала, с которой сравнивается. Если ширина полос аварийного сигнала меньше чем FPTV, это указывает, что спектр содержит один или более выбросов, вызванных чем-то отличным от выпуска газа, и что допустимо исключить эту ширину полос от рассмотрения микроконтроллером 90. Микроконтроллер адаптирует электронные фильтры для исключения всего или каждой части частотного диапазона, представляющего ширину полос аварийного сигнала на этапеS13-4. Фиг. 22 показывает частотный выброс 106, который был удален из частотного диапазона детектора. Конечно, при повторении способа, если выброс больше не появляется выше порога аварийного сигнала, эта ширина полос может быть добавлена назад в рассматриваемый диапазон детектора 10. Однако если ширина полос аварийного сигнала превышает FPTV, это указывает, что детектированный звук может быть утечкой газа. Соответственно, микроконтроллер 90 не удаляет никакую часть ширины полос аварийного сигнала из детектируемого диапазона, а вместо этого переходит к этапу S13-5,где берет начало временная задержка. Способ производит повторения пока временная задержка не истечет на этапе S13-6. Если ширина полос аварийного сигнала все еще выше FPTV, детектор 10 входит в режим аварийного сигнала на этапе S13-7. Таким образом, детектор способен удалить определенные частоты из диапазона детектирования частот. Это уменьшает полную ширину полосы детектирования, однако, это обеспечивает детектирование широкополосного выброса газа, как показано на фиг. 23. Механический шум, производимый машинным оборудованием, может сдвигать центральную частоту, поскольку износ сохраняется: центральная частота может увеличиваться или понижаться в зависимости от дефекта, как проиллюстрировано фиг. 24. Начальный шумовой выброс на фиг. 20 был при 40 кГц, но понизился к 36 кГц на фиг. 24. Однако исполнение способа с повторением дает возможность удаления ширины полос со сдвигом в такой же мере. Фиг. 25 показывает выброс 106, передвинувшийся к центральной частоте 36 кГц и в той же мере ликвидированную передвинувшуюся ширину полос. Как упоминалось выше, при использовании этого способа, является возможным устранить множественные частоты для того, чтобы избежать некоторого количества выбросов в фоновом шуме. Фиг. 26 показывает два выброса 106, 108, которые могут быть вызваны многочисленным машинным оборудованием или отзвуком звуковой сигнализации. Фиг. 27 показывает, как детектор отвечает на множественные выбросы и корректирует заштрихованную зону аварийного сигнала для того, чтобы избежать ложных аварийных сигнализаций.FPTV является специфичным к месту эксплуатации и зависящим от других вещей природы фонового ультразвукового шума, отношения оператора предприятия и в будущем может зависеть от нормативных актов. Например, если во время обследования места эксплуатации определен только один ультразвуковой пик, является возможным установить FPTV, например, в 5% частотного диапазона. Если детектировано несколько выбросов, возможно необходимо увеличить FPTV вплоть до 50%, чтобы гарантировать отсутствие ложных аварийных сигнализаций. При детектировании узкополосного выброса шума предусмотрено, что детектор может быть сконфигурирован с возможностью предупреждать оператора предприятия посредством подходящего аварийного сигнала о том, что был детектирован выброс. Также является возможным, используя любой из способов оценки направления, описанных выше, предоставить для детектора выходные сигналы, указывающие направления выброса, относительно детектора. В другом варианте детектор может быть обеспечен только этой функциональностью, т.е. отслеживать только такие шумовые выбросы, а не отслеживать утечку газа. В то время как этот вариант осуществления был описан в связи с детектором, содержащим четыре датчика, следует принять во внимание, что принципы изобретения могут быть применены к детектору,содержащему один, два или более датчиков. Со ссылкой на фиг. 28 вариант осуществления ультразвукового датчика обычно указывается номером 110 ссылки. На фигуре в мм показаны габаритные размеры датчика 110. Датчик 110 содержит поверхность 112 монтирования, которая дает возможность ему быть смонтированным на каркасе (не показан), например, переносного устройства детектирования или детектора, предназначенного быть смонтированным в зафиксированном местоположении, как, например, детектор 10, описанный выше. Конструкция датчика 110, описанная ниже, может быть использована для датчика 20 детектора 10. Кристалл пьезоэлектрика 114 имеет размеры, как описано выше по отношению к пьезоэлектрическому кристаллу 20. Во-первых, выбирается форма материала пьезоэлектрического кристалла; в этом примере выбирается стрежневая или цилиндрическая форма по причине того, что они имеются в наличии у производителей, и материал является PZTA1, который является типичным образцом цирконататитоната свинца. Возможны другие формы материалов, как описано более подробно ниже. Производители предоставляют частотные константы для конкретных форм, и они также имеются в наличии в спецификациях. В этом случае частотная константа N3 является 1410 Гцм. Длина кристалла (т.е. верхнее и нижнее направление на фиг. 28) тогда определяется частотным диапазоном, который должен быть детектирован. В этом варианте осуществления датчик 110 предназначен для детектирования ультразвука в диапазоне 25-80 кГц. Частота резонанса ur пьезоэлектрика относится к его длине L как ur=N/L, где N продольный тип частотной константы. Длина кристалла L для того, чтобы избежать резонансной точки в частотном диапазоне детектирования (что в противном случае должно исказить линейность), задается как где high является верхним пределом частотного диапазона, который должен быть детектирован, и low является нижним пределом частотного диапазона. В этом примере длина L должна не попадать между 17,6 и 56,4 мм. Принимая во внимание типичные уровни звукового давления выбросов газа под давлением и стоимости материалов, является предпочтительным выбрать частоту резонанса, которая больше чем наивысшая частота частотного диапазона, который должен быть детектирован, имея в результате более короткую длину, а не более длинную длину. Причина состоит в том, что уровни давления являются более низкими при высоких частотах и более маленькие кристаллы, как правило, являются более дешевыми. На следующем этапе определяется ширина пьезоэлектрика 114. В частности, пьезоэлектрик 114 имеет чувствительную поверхность 116, и для улучшения чувствительности площадь чувствительной поверхности 116 должна быть как можно больше при соблюдении следующих условий. Чтобы уменьшить вероятность ослабляющей интерференции между звуковыми волнами на чувствительной лицевой поверхности 116, является целесообразным сохранить самый длинный размер от края до края лицевой поверхности в два раза ниже самой короткой длины волны ультразвука, который должен быть детектирован. В этом случае самая короткая длина волны - 4 мм при 80 кГц. Следовательно, чувствительная поверхность 116 имеет самый длинный размер в идеальном случае немного меньше 8 мм, допустим 7,9 мм для верхнего предела в частотном диапазоне 80 кГц. Для того чтобы уменьшить стоимость, затем может быть выбран готовый для использования пьезоэлектрик, удовлетворяющий условию длины и ширины. Например, может быть использован пьезоэлектрик в PZTA1 диаметра 6 мм (т.е. с круглой чувствительной поверхностью 116) и 6 мм длины, который в настоящий момент доступен для приобретения от Morgan Electro Ceramics, Inc. Такой кристалл имеет частоту резонанса 242 кГц 3%, т.е. выше частотного диапазона датчика 110. Предпочтительная форма чувствительной поверхности 116 является круглой, но любая другая форма в принципе будет рабочей (например, овальная, треугольная, пятиугольная, шестиугольная и т.д.), при условии, что наиболее длинный размер не был бы больше чем около двух наиболее коротких длин, которые должны быть детектированы. Круглая поверхность обеспечивает наибольшую чувствительность, в то же время уменьшая возможность интерференции звуковых волн. Пьезоэлектрик 114 может содержать любые пьезоэлектрические материалы, включающие в себя кристаллы, такие как кварц (SiO2), берлинит (AlPO4), ортофосфат галлия (GaPO4) и турмалин; керамику,включающую в себя титанат бария (BaTiO3) и цирконат-титонат свинца; оксид цинка (ZnO), нитрид алюминия (AlN), поливинилиденфторид (PVDF), танталит лития, лантан-галлиевый силикат, перовскитовые вольфрамо-бронзовые структуры, включающие в себя BaTiO3, KNbO3, Ba2NaNbO5, LiNbO3,SrTiO3, Pb(ZrTi)O3, Pb2KNb5O15, LiTaO3, BiFeO3 и NaxWO3. В этом варианте осуществления пьезоэлектрик 114 содержит поляризованную кристаллическую структуру с двумя диполями, расположенными вдоль вертикальной оси фиг. 28. Таким образом, деформация кристалла звуковыми волнами, падающими на чувствительную лицевую поверхность 116, ограничена вертикальной осью. В то время как использование поляризованного кристалла не является необходимым, все же является предпочтительным, чтобы чувствительность кристалла уменьшалась с уменьшением поляризации. Для дополнительной помощи монокристаллу, т.е. пьезоэлектрику 114, выдавать линейные результаты необходимо уменьшить или устранить вибрации и другие виды побочного шума. С этой целью пьезоэлектрик 114 механически и электрически изолируется от корпуса 120. Корпус 120 содержит цилиндрическое полое тело, сделанное из материала, подходящего для защиты датчика 110 от повреждения в рабочей среде. Если детектор предназначен для монтажа в зафиксированном местоположении (как, например, детектор 10), предпочтительно использовать нержавеющую сталь или подобное, в то время как в портативном переносном устройстве может быть применен алюминий или конструкционный пластик,такой как полиоксиметилен (также известный как DELRIN). При изготовлении из нержавеющей стали общий вес датчика 110 составляет около 86 г, тогда как, если он изготовлен из DELRIN, общий вес составляет около 1,5 г. Корпус 120 имеет отверстие 122, чтобы при использовании подвергать непрямому воздействию внешней окружающей среды чувствительную лицевую поверхность 116. В окружности отверстия 122 корпус имеет наклон вверх на угол 9 относительно плоскости, определенной чувствительной лицевой поверхностью 116. Это помогает удалению звуковых волн, которые отражаются на корпусе 120, от падения на пьезоэлектрик 114. Не является обязательным то, что угол наклона составляет 9; любой угол между 0 и 45 будет удовлетворительным. Было обнаружено, что пьезоэлектрик 114 может поддерживаться в корпусе 120 одним или большим количеством типов материала, имеющего достаточную твердость для удержания пьезоэлектрика 114 на месте, но который обеспечивает деформацию пьезоэлектрика под влиянием волн звукового давления, по существу, без демпфирования в интересующем частотном диапазоне, в этом случае между около 25 и 80 кГц. Однако в то же время материал(ы) обеспечивает(ют) функцию механического демпфирования всего пьезоэлектрика 114 касательно, по меньшей мере, некоторых частот за пределами этого частотного диапазона чувствительности; таким образом, пьезоэлектрик 114 защищается от ударов по корпусу 120 или других низкочастотных физических вибраций, вызванных двигателями и т.д. Было обнаружено, что пеноматериалы с открытыми или закрытыми порами выдают наилучшие результаты. В этом варианте осуществления первое кольцо 124 пеноматериала с закрытыми порами окружает изогнутую внешнюю поверхность пьезоэлектрика 114, и плечевая часть кольца 124 удлиняется поверх части более низкой положительной лицевой поверхности 118. Таким образом, отверстие 126 предоставлено в кольце 124 пеноматериала для крепления кабеля (не показан) к электроду (не показан) на положительной поверхности 118. Во время рассмотрения подходящих материалов для электрического изолирования и устранения механических вибраций между пьезоэлектрическим кристаллом 114 и клеткой Фарадея (описанного более подробно ниже) было протестировано некоторое количество материалов с различными плотностями,и были получены разные результаты. Первоначальные тесты были предприняты, используя материалы, которые имелись в наличии. Все они были изготовлены с образованием трубки с внешним диаметром 9 мм и внутренним диаметром около 4,9-5 мм и длиной 6 мм. Пьезоэлектрический кристалл был вставлен в материал, и затем они оба вставлены в металлическую клетку, действующую как клетка Фарадея. Вся сборка затем была протестирована для установления значений чувствительности для утечек воздуха под давлением наряду с эффектами вибрации. Протестированными материалами были PTFE, неопреновый каучук, сшитый пенополиэтилен с закрытыми порами А 340, силиконовая губка SE533, неопреновый пеноматериал с закрытыми порами А 311, губчатый каучук EPDM (этиленпропилендиеновый каучук), пенополиуретан А 350 и пенополистирол EPS100. Тестирование было предпринято с 40 кГц звуковым источником, производящим 100 дБ на расстоянии в 1 м. Было выяснено, что показания чувствительности должны быть уменьшены, так как плотность материала увеличилась, хотя был обнаружен горизонтальный участок максимальных значений.PTFE (2200 кг/м 3) и неопреновый каучук (1400 кг/м 3) оба уменьшили выходной сигнал на 25%, в то время как силиконовая губка SE533 (530 г/м 3) уменьшила сигнал на 15%. Неопреновый пеноматериал с закрытыми порами А 311 (150 кг/м 3) и губчатый каучук EPDM (140 кг/м 3) были оба в пределах 0,5% показания, в то время как пенополиуретан А 350 (30 кг/м 3) и пенополистирол EPS 100 (20 кг/м 3) были в пределах 3% показания. Обычно 0-5% отклонение в измеренном уровне дБ звукового источника является приемлемым и может быть удалено, используя выигрыш от электроники во время калибровки. Однако мы обнаружили, что существует диапазон плотностей, которые имеют самое незначительное воздействие(например, меньше чем 0,5%) на выходной сигнал от пьезоэлектрика 114. Диапазон плотностей предполагается как диапазон от около 140 вплоть до 150 кг/м 3. Однако ожидается, что действительный пригодный для работы диапазон плотностей является более широким, чем этот, располагаясь где-то между 20 и 530 кг/м 3; дополнительные тестирования, как описано выше, различных материалов могли бы легко установить действительный пригодный для работы диапазон. Более того, пригодный для работы диапазон мог бы незначительно отличаться в зависимости от материала пьезоэлектрика 114. Затем было предпринято тестирование для оценки последствий вибрации на сборку. Сборка была помещена поверх плоской металлической поверхности, с вертикальным направлением чувствительности пьезоэлектрического кристалла, обеспечивая изоляцию клетки Фарадея. Плоская металлическая поверхность симулировала оболочку или поверхность монтажа, к которой датчик должен был быть прикреплен при использовании в промышленных окружающих средах. С каждым типом материала были предприняты два теста, чтобы оценить устойчивость к вибрации. Первое - падение веса в 1 кг с высоты 1 м на пластину приблизительно в 100 мм от датчика. Было установлено фиксирующее приспособление для того,чтобы гарантировать повторяемость, и чтобы результаты придерживались подобного шаблона в соответствии со звуковым тестом. Чем более плотный был материал, тем больше было показание производимого выброса или "тряски", испытываемой пьезоэлектрическим кристаллом 114, как могло бы ожидаться. Хотя такие выбросы являются допустимыми в контексте использования детектора вследствие задержки аварийного сигнала (т.е. детектированный сигнал должен иметь определенную продолжительность, перед тем как вызывается срабатывание режима аварийного сигнала), рекомендуется ограничить влияние механической силы на пьезоэлектрический кристалл 114, так как это будет воздействовать на точки паянного соединения. После теста с падением датчик был подвергнут воздействию звукового источника 40 кГц при 100 дБ на 1 м. Варианты датчиков, содержащих пенополиуретан А 350 и пенополистиролEPS100, выдали показания, уменьшенные 30% от фактически ожидаемого значения. При осмотре было выяснено, что кристалл был перемещен вниз внутрь сборки, и было определено, что это произошло, потому что материалы А 350 и EPS100 не были достаточно жесткими, чтобы удержать пьезоэлектрический кристалл в его положении. Датчики были повторно собраны, и для всех сборок был выполнен второй тест (описанный ниже). Второй тест был проведен для моделирования постоянной вибрации, используя электродвигатель,скрепленный болтами с плоской металлической поверхностью, со смещенным центром массы на приводном валу. Затем двигатель был приведен в движение, используя различные напряжения для увеличения оборотов приводного вала. На скоростях ниже 10000 об./мин все датчики показывали небольшое увеличение в выходном сигнале. Выше 10000 об./мин наиболее плотные материалы (выше 500 кг/м 3) начинали показывать повышенный сигнал. Двигатель был выведен на 35000 об./мин с увеличенным выходным сигналом, показанным с использованием всех материалов кроме неопренового пеноматериала с закрытыми порами А 311 (150 кг/м 3) и губчатого каучука EPDM (140 кг/м 3), где выходной сигнал остался практически константой. Затем датчики были подвергнуты воздействию источника шума, и снова пенополиуретан А 350 (30 кг/м 3) и пенополистирол EPS100 (20 кг/м 3) потеряли чувствительность. При разборке было замечено, что кристаллы снова были смещены вниз. Поэтому был сделан вывод, что подходящая плотность для ограничения наибольших внешних воздействий находится в отношении 1:50 и 1:60 пьезоэлектрического кристалла к монтируемому материалу. Обнаружено, что более низкие плотности не поддерживают вес кристалла, в то время как материалы с более высокой плотностью имеют склонность к передаче вибраций прямо к пьезоэлектрическому кристаллу 114. В этом варианте осуществления пьезоэлектрик 114 выполнен из цирконата-титоната свинцаPZT5A1, который имеет плотность 7750 кг/м 3 и пеноматериал с закрытыми порами 124 содержит губчатый каучук EPDM (закрытые поры), который имеет плотность 140 кг/м 3 и (в настоящее время доступный для приобретения у RH Nuttall Ltd., www.rhnuttall.co.uk, помимо других). Это задает отношение плотности кристалла к пеноматериалу в размере 1:55. Так как пеноматериал является материалом с закрытыми порами, это также будет действовать в качестве барьера давления между положительной и отрицательной сторонами пьезокристалла 114, так что звуковые волны сдерживаются от достижения положительной стороны кристалла в отличие от свободной отрицательной чувствительной лицевой поверхности. Пьезоэлектрик 114 также имеет необходимость быть изолированным от другого побочного шума,такого как электромагнитное излучение от источников питания, радиоволн и т.д. В то время как пьезоэлектрику требуется быть непрямо открытым для воздуха на отрицательном конце (т.е. чувствительной поверхности 116) для измерения изменений уровней звукового давления, важно защитить оставшуюся часть кристалла, используя клетку 128 Фарадея. В этом варианте осуществления клетка Фарадея содержит алюминий, хотя другие электропроводящие материалы могут быть использованы в зависимости от окружающей среды. Клетка 128, 130 Фарадея содержит отверстие 132, которое имеет такой же диаметр и форму, как чувствительная поверхность 116 пьезоэлектрика 114. Форма клетки Фарадея, прилегающей к отверстию 132, является, по существу, такой же, как у отверстия 120, как описано выше, и те же самые диапазоны углов наклонной поверхности также являются подходящими. Небольшая вертикальная поверхность 133 клетки 128 Фарадея, прилегающая к чувствительной поверхности 116, преимущественно не больше по глубине, чем половина минимальной длины волны, которая должна быть детектирована,что в этом случае равно около 2 мм. Это помогает уменьшить количество звуковых волн, отраженных на чувствительную поверхность 116, что уменьшает нули и выступающие максимумы в ответе пьезоэлектрика. Помимо отверстия 132, клетка 128, 130 Фарадея полностью огораживает оставшуюся часть кристалла, за исключением отверстия 134 для доступа кабеля к отрицательной лицевой поверхности 118 пьезоэлектрика. Затем клетка 128, 130 Фарадея электрически соединяется с отрицательной стороной (т.е. чувствительной поверхностью 116) пьезоэлектрика 114 и впоследствии с модулем предварительного усиления,как описано более подробно ниже. Кольцо 124 пеноматериала с закрытыми порами также действует как электрический изолятор между телом пьезоэлектрика 114 и клеткой 128, 130 Фарадея. Затем клетка 128, 130 Фарадея электрически изолируется от основной оболочки, чтобы обеспечить перенос или установку, например, в детектор, такой как детектор 10. Также предпочтительно, но не обязательно, дополнительно изолировать пьезоэлектрик 114 от вибраций в этой точке. С этой целью второе кольцо 136 пеноматериала с закрытыми порами предоставлено вокруг клетки 128, 130 Фарадея для отделения ее от корпуса 120; кольцо 136 пеноматериала содержит цилиндрический участок и участок основания, последний удлиняющийся под основанием клетки 130 Фарадея. Кольцо 136 пеноматериала действует как электрический изолятор и предоставляет дополнительную изоляцию от вибрации между корпусом 120 и клеткой 128, 130 Фарадея. Размер, толщина материала кольца 136 пеноматериала, устраняющего вибрации, является зависимым от применения, но основана на частоте свободных колебаний клетки 128, 130 Фарадея (которая в этом варианте осуществления больше чем 100 кГц) и природы вибраций,которым будет подвергаться датчик 10. Кольцо 136 пеноматериала может содержать или может не содержать тот же самый материал, что и кольцо 124 пеноматериала. В этом варианте осуществления датчик 10, таким образом, содержит двухступенчатый механизм демпфирования вибраций, содержащий первую и вторую структуры пеноматериала; в зонах с сильной вибрацией механизм демпфирования вибраций может быть усилен до трех- или более ступенчатой системы, используя дополнительные демпферы. В этом варианте осуществления кольцо 136 пеноматериала содержит губчатый каучук EPDM, хотя осуществимы многие другие альтернативные варианты. Однако пеноматериалы с закрытыми порами рекомендованы для применений, где требуется защита от проникновения посторонних сред по отношению к отверстию 122 (хотя их использование не ограничено этим применением). Функция кольца 136 пеноматериала может быть предоставлена широким диапазоном других конструкций, но не ограничена любым упомянутым ранее материалом для кольца 124 пеноматериала, включающим в себя дерево с мягкой древесиной, гель, пружины, амортизирующие блоки и т.д. Дополнительное преимущество в использовании пеноматериала с закрытой порой для изоляции от вибрации и электричества состоит в возможности герметизации от влаги и загрязнителей, когда это требуется применением. Прижимное усилие, требуемое для сжатия пеноматериала для герметизации для требуемой степени защиты от проникновения, является зависимым от применения, но должно быть принято во внимание следующее. Процентное отношение сжатия пеноматериала будет иметь воздействие на изоляцию от вибрации так же, как на степень защиты от проникновения. Тестирование обнаружило, что увеличение требования в степени защиты от проникновения имеет результатом увеличение плотности пеноматериала с рекомендацией того, чтобы сжатие пеноматериала сохранялось меньше 50% от свободной от воздействия толщины. Пеноматериал с закрытой порой обеспечивает защиту от окружающей среды вокруг клетки 128, 130 Фарадея, но не обеспечивает защиты для чувствительной поверхности 116. Для герметизации чувствительной поверхности 116 и для того, чтобы избежать потери чувствительности, требуется покрытие, которое является стойким для окружающей среды, электрически нейтральным и может герметизировать чувствительную лицевую поверхность 116 без образования любых воздушных карманов. Настоящее изобретение использует гибкую жестко затвердевающую резиновую смесь, которая перед затвердеванием является жидкой с малой вязкостью для того, чтобы позволить образоваться поверхностной секции 138. Для простоты изготовления подходящим типом смеси является силиконовый каучук, вулканизирующийся при комнатной температуре; один пример, который был найден это Flowsil FC, продаваемый Intek Adhesives Ltd. Смесь должна быть применена, используя подводящую линию для образования слоя между около 0,5 и 1 мм перед чувствительной лицевой поверхностью, хотя возможны и другие толщины. Уплотнение 138 действует на амплитудно-частотные характеристики пьезоэлектрика 114, хотя было выявлено, что использование смеси с удельной плотностью около 1,5 г/мл или меньше вызывает ни- 22019668 чтожно малую потерю производительности. Для проверки характеристики чувствительности пьезоэлектрик 114 калибруется во время изготовления, используя известное звуковое давление на известном расстоянии от пьезоэлектрика 114 в пяти точках по ширине частотного диапазона датчика 10. Начало отсчета и усиление тогда подстраиваются в предусилителе, чтобы попадать в установленные пределы. Со ссылкой на фиг. 29 схема показывает, как сигнал от пьезоэлектрика 114 может быть приведен в нужное состояние перед дискретизацией. Электроника должна быть размещена в отдельном проводящем корпусе (но которая могла бы быть частью одного переносного устройства, например), который обеспечивает защиту схемы от окружающей среды, в которой она может быть использована. Проводимость корпуса требуется для устранения побочного шума ЕМС от достижения схем усиления. Цель приведения в нужное состояние в том, чтобы усилить сигнал от пьезоэлектрика 114 к уровню, соответствующему типичной цифровой схеме, такой как аналоговый или цифровой преобразователь, и ограничить выходные данные к требуемому частотному диапазону. Выходной сигнал от пьезоэлектрика проходит через предварительный усилитель 140 с переменным коэффициентом усиления; коэффициент усиления предварительного усилителя управляется корректировкой резистора R4 RG, как описано более подробно ниже. Выходные данные от предварительного усилителя 140 проходят через фильтр верхних частот, образованный объединением CI CF1 и R3 RF1, чьи значения устанавливаются для пропускания частот выше выбранной частоты, например 25 кГц. Сигнал затем проходит через буферный усилитель 142 единичного усиления и затем в фильтр низких частот, образованный R1 RF2 и С 2 CF2, чьи значения устанавливаются для пропускания частот ниже выбранной частоты, например 80 кГц. В некоторых применениях могут потребоваться более сложные фильтры. Сигнал проходит через другой буферный усилитель 144 единичного усиления и затем через необязательный линейный или логарифмический усилитель в зависимости от применения. Сигнал затем, не обязательно, проходит через выпрямляющий усилитель 146, через буферный усилитель 142 тройного усиления и затем конечный фильтр низких частот, образованный R6 RF3 и С 3 CF3. После этого он доступен для обрабатывающей схемы, как, например, аналого-цифрового преобразователя и микроконтроллера (например, Philips 98LPC936) для анализа выходного сигнала. В этом отношении микроконтроллер может работать таким же образом, как описано выше для детектора 10. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Ультразвуковой детектор для установки в положение для обследования зоны для источника ультразвука, распространяющегося по воздуху, причем детектор содержит корпус, снабженный датчиком обнаружения ультразвукового сигнала и преобразователем для выполнения самотестирования, отличающийся тем, что преобразователь выполнен с возможностью формирования широкополосного ультразвукового сигнала во время самотестирования для приема упомянутым датчиком. 2. Ультразвуковой детектор по п.1, в котором преобразователь сконфигурирован с возможностью формирования широкополосного ультразвукового сигнала, имеющего частотный спектр, подобный спектру, который производится при утечке газа. 3. Ультразвуковой детектор по п.1 или 2, в котором преобразователь содержит дроссель, через который при использовании проходит газ, причем дроссель сформирован с возможностью вырабатывать широкополосный ультразвуковой сигнал при прохождении через него газа при достаточном давлении. 4. Ультразвуковой детектор по любому из пп.1-3, в котором датчик имеет внешне ориентированную чувствительную лицевую поверхность датчика, причем преобразователь установлен внутри корпуса в зоне за датчиком, в результате чего возможность обнаружения ультразвука, распространяющегося по воздуху, посредством внешне ориентированной чувствительной лицевой поверхности датчика беспрепятственно обеспечивается преобразователем, при этом правильное функционирование датчика может быть протестировано упомянутым детектором. 5. Ультразвуковой детектор по любому из пп.1-3, в котором преобразователь установлен так, чтобы вырабатывать широкополосный ультразвуковой сигнал за пределами детектора, в результате чего может быть протестировано правильное функционирование датчика. 6. Ультразвуковой детектор по любому из пп.1-5, который сконфигурирован с возможностью проверять калибровку датчика, используя преобразователь. 7. Ультразвуковой детектор по п.6, в котором при использовании преобразователь вырабатывает, по существу, равномерный частотный спектр в пределах частотного чувствительного диапазона детектора, в результате чего облегчается калибровка детектора. 8. Ультразвуковой детектор по любому из пп.1-7, который сконфигурирован с возможностью при использовании отслеживать ширину полосы частот для ультразвукового сигнала, причем по меньшей мере часть из этой ширины полосы частот удаляется или игнорируется так, чтобы препятствовать генерированию детектором ложного аварийного сигнала в ответ на нежелательный ультразвуковой сигнал. 9. Ультразвуковой детектор по п.8, который сконфигурирован с возможностью при использовании исследовать ширину полосы частот на любые уровни звукового давления, находящиеся выше порога аварийного сигнала, и удалять и игнорировать любой частотный диапазон, который находится ниже определенного процентного отношения ширины полосы частот, в результате чего детектор может работать,- 23019668 по существу, без ложных аварийных сигналов, вызванных нежелательным ультразвуковым сигналом. 10. Ультразвуковой детектор по пп.8-9, сконфигурированный с возможностью периодически отслеживать ширину полосы так, что детектируется любой частотный сдвиг нежелательного ультразвукового сигнала, в результате чего может быть выполнен соответствующий сдвиг на части полосы частот,которая удаляется или игнорируется. 11. Способ обследования зоны источника ультразвука, распространяющегося по воздуху, содержащий этапы, на которых обследуют зону, используя ультразвуковой детектор по любому из предшествующих пп.1-10, при этом преобразователь используется для испускания широкополосного ультразвукового сигнала, в результате чего выполняется самотестирование детектора. 12. Способ обследования зоны источника ультразвука, распространяющегося по воздуху, содержащий этапы, на которых устанавливают в или рядом с зоной один или более ультразвуковых детекторов по любому из пп.1-10.
МПК / Метки
МПК: G01H 11/08, G01M 3/00
Метки: способы, детектор, детектирования
Код ссылки
<a href="https://eas.patents.su/30-19668-detektor-i-sposoby-detektirovaniya.html" rel="bookmark" title="База патентов Евразийского Союза">Детектор и способы детектирования</a>
Детектор землетрясения
Номер патента: 3798
Опубликовано: 30.10.2003
Авторы: Халилов Эльчин Нусрат Оглы, Айда-Заде Шагин Рафик Оглы
МПК: G01V 1/16
Метки: детектор, землетрясения
Формула / Реферат:
Детектор землетрясения, содержащий корпус, датчик колебаний с инертной массой, источник питания, блок тонального сигнала, винт настройки чувствительности, отличающийся тем, что детектор дополнительно содержит последовательно соединенные между собой предварительный усилитель с регулятором чувствительности, аналогово-цифровой преобразователь, регулятор этажности, фильтр частоты с анализатором колебаний, блок светового сигнала, ручной прерыватель...
Раствор для лизиса клеток или придания им проницаемости и способы детектирования нуклеиново-кислотной мишени
Номер патента: 11415
Опубликовано: 27.02.2009
Авторы: Фелдер Стефен, Крис Ричард М.
МПК: C07H 21/02, C12Q 1/68, C12P 19/34...
Метки: лизиса, клеток, способы, мишени, нуклеиново-кислотной, раствор, придания, детектирования, проницаемости
Формула / Реферат:
1. Раствор для лизиса клеток или придания им проницаемости, содержащий приблизительно от 8 до приблизительно 60% (об./об.) формамида, приблизительно от 0,01 до приблизительно 0,5% (об./об.) додецилсульфата натрия (SDS) и 0,5-6Х SSC в качестве буфера. 2. Раствор по п.1, содержащий приблизительно от 10 до приблизительно 30% (об./об.) формамида. 3. Раствор по п.1, содержащий приблизительно от 0,03 до приблизительно 0,10% (об./об.) SDS. 4. Раствор...
Детектор излучения (варианты)
Номер патента: 1454
Опубликовано: 23.04.2001
Авторы: Данилов Вячеслав Александрович, Козусь Виктор Иванович
Метки: излучения, варианты, детектор
Формула / Реферат:
1. Детектор излучения, содержащий фотодиод и нагрузку, включенные последовательно, причем нагрузка сигнальным выводом соединена с фотодиодом, а с другой стороны соединена с общей шиной, отличающийся тем, что детектор дополнительно содержит транзистор и генератор импульсов опроса, при этом второй электрод фотодиода соединен с первым электродом транзистора, управляющий электрод которого соединен с выходом генератора импульсов опроса, а третий...
Детектор утечки с использованием оптического волокна
Номер патента: 13831
Опубликовано: 30.08.2010
Авторы: Зандийех Али Реза Камбиез, Стейтон Пол
МПК: G01M 3/38
Метки: детектор, волокна, использованием, оптического, утечки
Формула / Реферат:
1. Устройство для обнаружения утечки, содержащее волоконно-оптический датчик, выполненный для обнаружения утечки флюида сквозь каркас шланга, в котором датчик выполнен для обнаружения места утечки на всем протяжении секции шланга.2. Устройство по п.1, дополнительно содержащее излучатель, выполненный для излучения светового импульса в оптическое волокно, и детектор, выполненный для обнаружения отраженного сигнала и для регистрации изменений...
Направленный детектор излучения и формирователь изображения
Номер патента: 1795
Опубликовано: 27.08.2001
Авторы: Кроненберг Стэнли, Бракер Джордж Дж.
МПК: G01T 1/00
Метки: изображения, направленный, излучения, формирователь, детектор
Формула / Реферат:
1. Направленный детектор излучения, содержащий средство, чувствительное к излучению, противоположные стороны которого закрыты экранирующими элементами, выполненными из материалов с атомными номерами, различающимися настолько, что когда излучение падает в детектор, имеется разность в прямой и обратной эмиссиях электронов с различных сторон детектора, средство для детектирования сигнала из средства, чувствительного к излучению. 2. Детектор по п.1,...
Предыдущий патент: Аэрозольная дезинфекционная система на основе субцикла
Следующий патент: Способ изготовления желобного устройства для разгрузочного конца отстойного бака для жидкость-жидкостной экстракции и указанное желобное устройство
Случайный патент: Аналоги противовирусных нуклеозидов и способы лечения вирусных инфекций, в частности вич инфекций