Способ генерации приводного сигнала с расширением спектра для группы сейсмических вибраторов с использованием двухпозиционной фазовой модуляции в каждом чипе приводного сигнала
Формула / Реферат
1. Способ генерирования сейсмической волны при разведке геологической среды, включающий следующие шаги:
применяют первый сейсмический вибратор над исследуемым участком геологической среды и
применяют, по меньшей мере, второй сейсмический вибратор над тем же участком, по существу, одновременно с применением первого сейсмического вибратора,
причем каждый из первого и второго сейсмических вибраторов имеет выбранный, отличный от других диапазон частотных характеристик и каждым из первого и второго сейсмических вибраторов управляет один и тот же приводной сигнал с прямым расширением спектра,
при этом для каждого вибратора выбирают различное количество операций модуляции для каждого логического значения в сигнале с прямым расширением спектра.
2. Способ по п.1, отличающийся тем, что каждое количество операций модуляции выбирают в соответствии с диапазоном частотных характеристик каждого вибратора.
3. Способ по п.1, отличающийся тем, что сигнал с прямым расширением спектра включает по меньшей мере один из следующих кодов последовательностей: код последовательности максимальной длины, код последовательности Голда и код последовательности Касами.
4. Способ по п.1, отличающийся тем, что каждый вибратор имеет по меньшей мере две резонансных частоты в выбранной полосе частот.
5. Способ по п.1, отличающийся тем, что участок геологической среды включает водный слой, причем время активации каждого вибратора соответствует глубине, на которой применяют каждый вибратор в водном слое, так что первый и, по меньшей мере, второй вибраторы работают как группа вибраторов.
6. Способ по п.5, отличающийся тем, что каждый из вибраторов применяют на такой глубине, что отраженная от поверхности волна-спутник усиливает направленный вниз выходной сигнал каждого вибратора в пределах выбранного частотного диапазона.
7. Способ по п.1, отличающийся тем, что операция модуляции включает двухпозиционную фазовую модуляцию.
8. Способ сейсморазведки геологической среды, включающий следующие шаги:
применяют ряд сейсмических вибраторов, каждый из которых имеет выбранный, отличный от других диапазон частотных характеристик, над исследуемым участком геологической среды;
регистрируют сейсмические сигналы, поступающие от ряда вибраторов, каждым из ряда сейсмоприемников, расположенных в пространственно разнесенных местах над этим участком;
при этом каждым вибратором управляет один и тот же приводной сигнал с прямым расширением спектра;
при этом для каждого вибратора выбирают различное количество операций модуляции для каждого логического значения в приводном сигнале;
определяют сейсмическую волну, поступающую от каждого из ряда вибраторов, в зарегистрированных сейсмических сигналах.
9. Способ по п.8, отличающийся тем, что каждое количество операций модуляции выбирают в соответствии с диапазоном частотных характеристик каждого вибратора.
10. Способ по п.8, отличающийся тем, что сигнал с прямым расширением спектра включает по меньшей мере один из следующих кодов последовательностей: код последовательности максимальной длины, код последовательности Голда и код последовательности Касами.
11. Способ по п.8, отличающийся тем, что каждый вибратор имеет по меньшей мере две резонансные частоты в выбранной полосе частот.
12. Способ по п.8, отличающийся тем, что участок геологической среды включает водный слой, причем время активации каждого вибратора соответствует глубине, на которой применяют каждый вибратор в водном слое, так что первый и, по меньшей мере, второй вибраторы работают как группа вибраторов.
13. Способ по п.12, отличающийся тем, что каждый из вибраторов применяют на такой глубине, что отраженная от поверхности волна-спутник усиливает направленный вниз выходной сигнал каждого вибратора в пределах выбранного частотного диапазона.
Текст
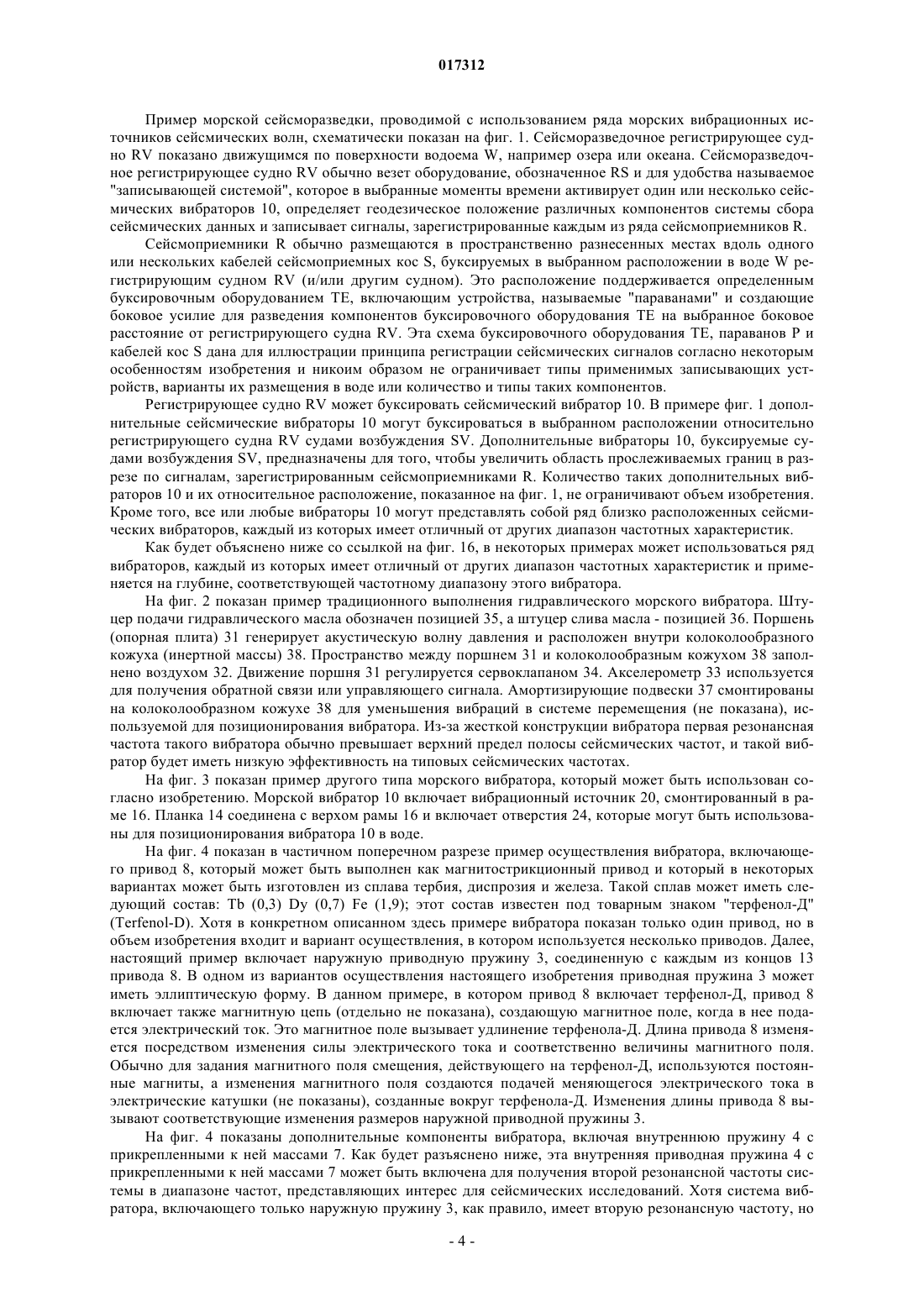
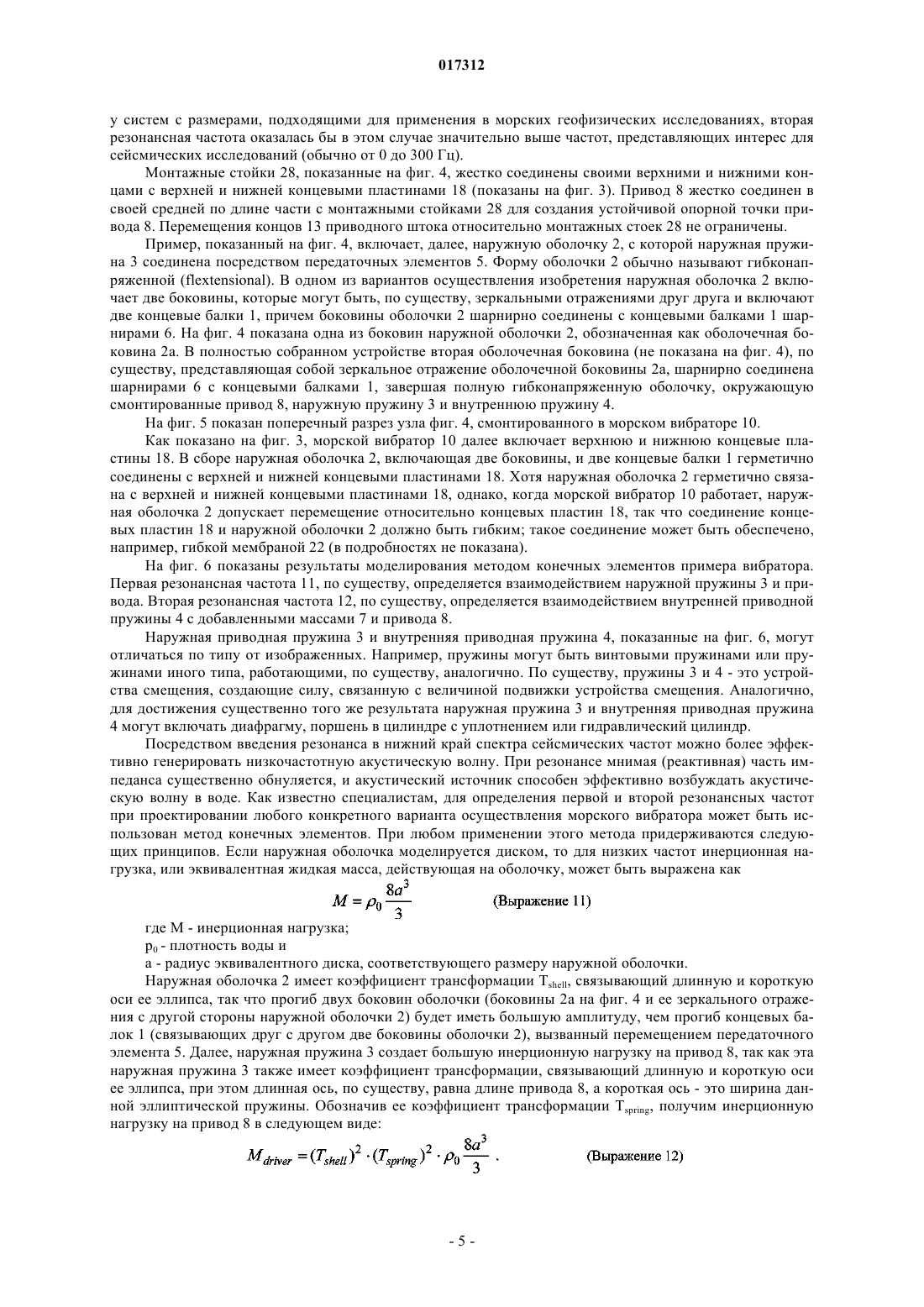
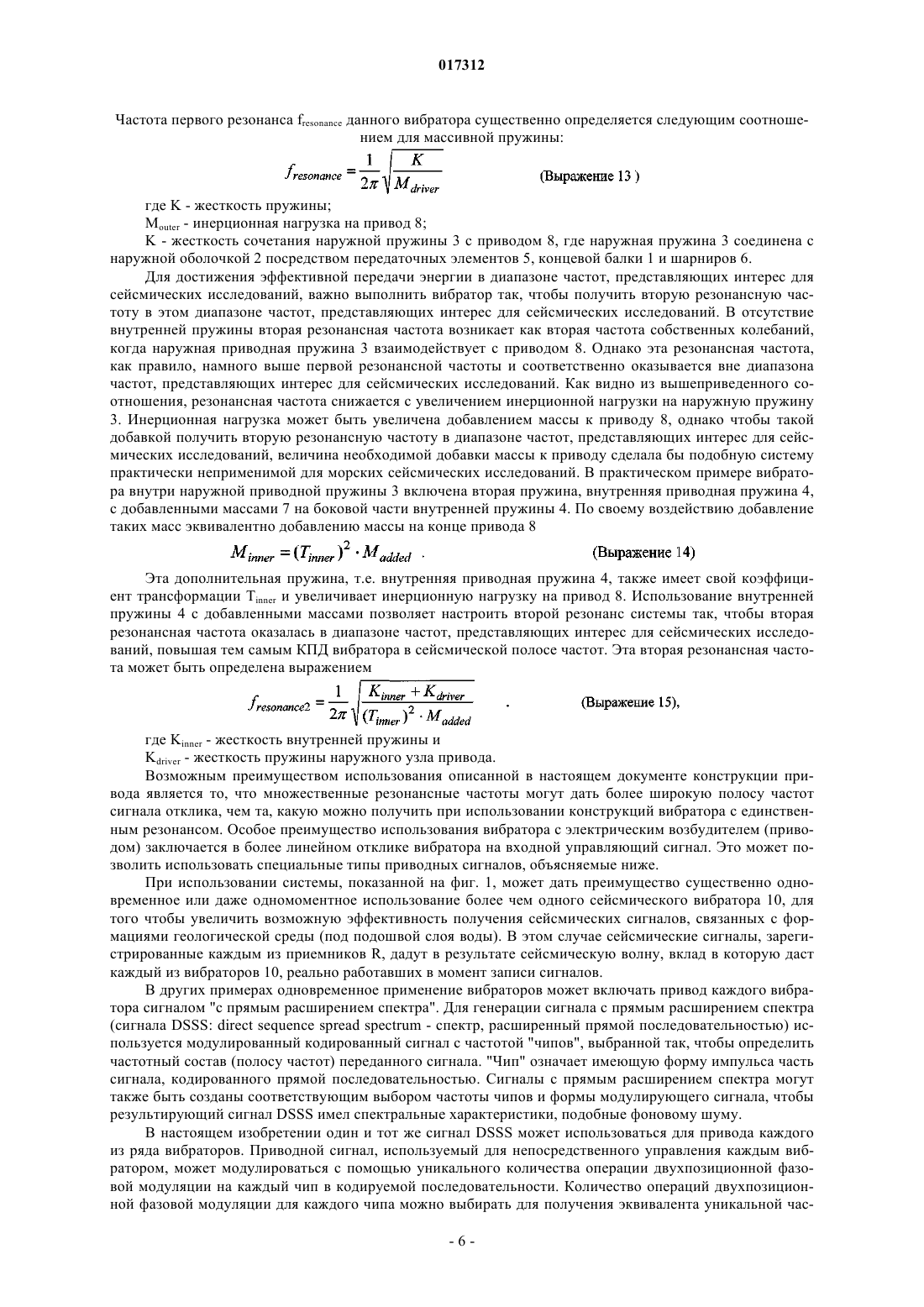
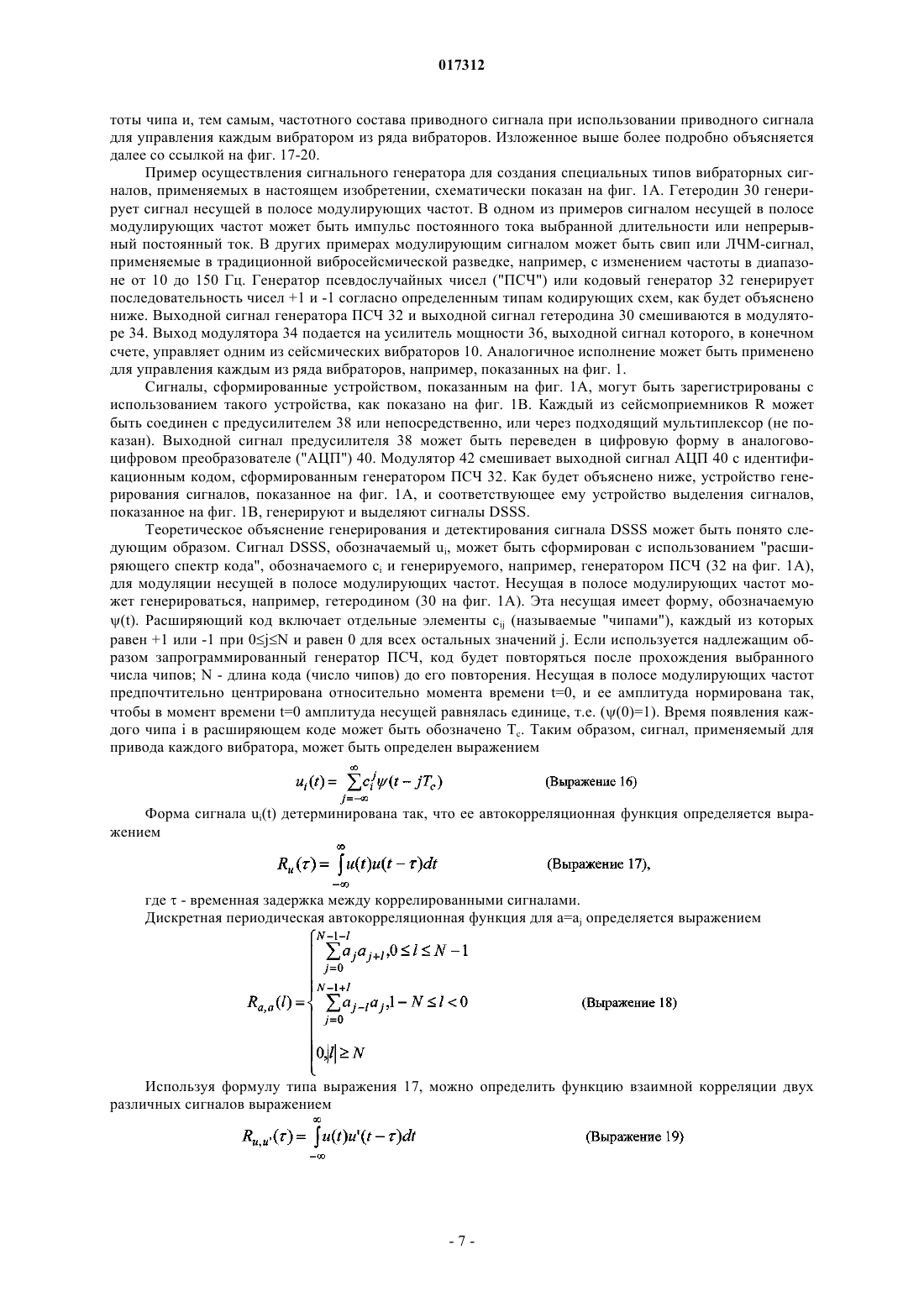
СПОСОБ ГЕНЕРАЦИИ ПРИВОДНОГО СИГНАЛА С РАСШИРЕНИЕМ СПЕКТРА ДЛЯ ГРУППЫ СЕЙСМИЧЕСКИХ ВИБРАТОРОВ С ИСПОЛЬЗОВАНИЕМ ДВУХПОЗИЦИОННОЙ ФАЗОВОЙ МОДУЛЯЦИИ В КАЖДОМ ЧИПЕ ПРИВОДНОГО СИГНАЛА Изобретение относится к способу генерирования сейсмической волны при разведке геологической среды, включающему в себя применение первого сейсмического вибратора над исследуемым участком геологической среды и применение по меньшей мере второго сейсмического вибратора над этим участком, по существу, одновременно с применением первого сейсмического вибратора. Первый и второй вибраторы имеют различные выбранные частотные характеристики. Каждым из двух вибраторов управляет один и тот же сигнал с прямым расширением спектра, причем для каждого вибратора выбирается различное количество операций модуляции для каждого логического значения в сигнале с прямым расширением спектра. Тенгамн Стиг Руне Леннарт (US) Хмара М.В. (RU)(71)(73) Заявитель и патентовладелец: ПГС ГЕОФИЗИКАЛ АС (NO) 017312 Область техники, к которой относится изобретение Настоящее изобретение в целом относится к геофизическим исследованиям, в особенности к вибрационному сейсмическому источнику, который используется в геофизических исследованиях. Более конкретно, изобретение относится к способам использования вибраторов для сбора сейсмических данных. Предшествующий уровень техники Источники сейсмических колебаний, включая вибраторы, используются в геофизических исследованиях, проводимых на суше и в водах, покрывающих поверхность земли. Акустическая волна, генерируемая такими источниками, распространяется вниз в геологическую среду, отражается от отражающих горизонтов в среде и регистрируется сейсмоприемниками, как правило, гидрофонами или геофонами на поверхности земли или вблизи от нее либо на водной поверхности. В общем случае сейсмический вибратор включает опорную плиту, взаимодействующую с водной или наземной поверхностью, инертную массу и гидравлические или иные устройства, заставляющие вибрировать инертную массу и опорную плиту. Вибрации обычно проводятся через некоторый диапазон частот по одной из известных схем, "свип" или "ЛЧМ" (chirp - линейная частотная модуляция, ЛЧМ). Сигналы, зарегистрированные сейсмоприемниками, взаимно коррелированны с сигналом датчика, расположенного вблизи опорной плиты. Результатом этой взаимной корреляции является сейсмический сигнал, приближающийся к такому, какой был бы зарегистрирован сейсмоприемниками при использовании сейсмоисточника импульсного типа. Использование вибраторов для возбуждения сейсмических волн в геологической среде имеет преимущество распределения энергии во времени, что снижает воздействие на окружающую среду по сравнению с воздействием на окружающую среду при использовании таких импульсных источников, как динамит или пневмопушки. Желательность применения сейсмических вибраторов в сейсморазведке диктуется не только возможными экологическими выгодами. Сейсмоисточник, способный генерировать сигналы произвольного вида, может дать существенные выгоды от использования более "умных" сейсмических сигналов, чем обычные свип- или ЛЧМ-сигналы. Такой сейсмоисточник мог бы генерировать сигналы, приближающиеся по своим характеристикам к фоновому шуму, а следовательно, менее восприимчивые к интерференции с шумом и, в то же время, оказывающие меньшее воздействие на окружающую среду. Практическим ограничителем использования вибраторов в таких схемах с усложненным сигналом для управления морскими вибраторами, в частности, является конструкция известных специалистам морских вибраторов. Для генерирования произвольных сигналов в диапазоне сейсмических частот необходимо иметь высокоэффективный источник, чтобы сделать этот источник управляемым во всем диапазоне сейсмических частот, представляющих интерес. Комбинирование нескольких по отдельности управляемых вибраторов с более сложными техническими средствами генерирования сигналов могло бы дать возможность генерировать одновременно несколькими сейсмоисточниками сейсмические сигналы с очень низкой взаимной корреляцией, что позволило бы повысить эффективность сбора сейсмических данных. Гидравлические морские вибраторы, известные специалистам, как правило, имеют резонансную частоту, превышающую верхний предел обычных сейсмических частот, представляющих интерес. Это означает, что энергетический КПД вибратора будет относительно невысоким, в особенности на низких частотах, но и в целом во всем диапазоне сейсмических частот. Типом сигнала и частотным составом гидравлических морских вибраторов трудно управлять. Кроме того, сигналы традиционных морских сейсмических вибраторов подвержены сильным нелинейным искажениям, что ограничивает возможности использования усложненных приводных сигналов. Для понимания этих характеристик вибратора можно рассмотреть импеданс низкочастотного вибратора. Полный импеданс для вибратора может быть выражен следующей формулой: где Zr - полный импеданс;-1 017312 При исследовании энерговыделения морского вибратора в качестве модели системы, включающей вибратор и воду, может быть выбран экранированный диск. Радиационный импеданс Rr экранированного диска дается выражением а реактивный импеданс причемJ1 - бесселева функция первого порядка. Разложение в ряд Тейлора вышеприведенных выражений дает Для низких частот, когда x=2ka много меньше 1, действительная и мнимая части выражения для полного импеданса могут быть аппроксимированы первыми членами своих рядов Тейлора. Соответствующие выражения для низких частот, когда длина волны много больше радиуса диска, приобретают следующий вид: Отсюда следует, что для низких частот радиационный импеданс R будет мал в сравнении с реактивным импедансом X, что означает низкую эффективность генерации сигнала. Соответственно, имеется потребность в эффективных морских вибраторах, способных генерировать сложные сигналы, и имеется потребность в повышении производительности операций сбора сейсмических данных для обеспечения более экономичной работы и минимизации воздействия морской сейсморазведки на окружающую среду. Кроме того, имеется потребность в приводных сигналах для сейсмических вибраторов, позволяющих повысить эффективность, с которой сигналы, эквивалентные тем, которые генерируются импульсным сейсмоисточником, могут быть выделены из ряда сейсмических вибраторов, применяемых, по существу, одновременно. Сущность изобретения Способ генерирования сейсмической волны при разведке геологической среды включает применение первого сейсмического вибратора над исследуемым участком геологической среды и применение, по меньшей мере, второго сейсмического вибратора над этим участком, по существу, одновременно с применением первого сейсмического вибратора. Первый и второй вибраторы имеют различные выбранные частотные характеристики. Каждым из этих двух вибраторов управляет один и тот же сигнал с прямым расширением спектра, причем для каждого вибратора выбирают различное количество операций модуляции для каждого логического значения в сигнале с прямым расширением спектра. Способ сейсморазведки геологической среды согласно другому аспекту настоящего изобретения включает применение ряда сейсмических вибраторов, каждый из которых имеет отличную от других выбранную частотную характеристику, над исследуемым участком геологической среды. Сейсмические сигналы, поступающие от ряда вибраторов, регистрируют каждым из ряда сейсмоприемников, расположенных в пространственно разнесенных местах над этим участком. Каждым вибратором управляет один и тот же приводной сигнал с прямым расширением спектра. Для каждого вибратора выбирают различное количество операций модуляции для каждого логического значения в приводном сигнале. Сейсмическая волна, поступающая от каждого из ряда вибраторов, определяется по регистрируемым сейсмическим-2 017312 сигналам. Прочие особенности и преимущества настоящего изобретения будут ясны из нижеследующего описания и прилагаемой формулы изобретения. Краткий перечень фигур чертежей На фиг. 1 показан пример морской сейсморазведки, проводимой с использованием ряда источников сейсмических волн. На фиг. 1 А показан пример осуществления генератора сигналов сейсмического вибратора. На фиг. 1 В показан пример соединенного с сейсмоприемником прибора выделения сигналов. На фиг. 2 показан пример конструкции традиционного гидравлического сейсмического вибратора. На фиг. 3 показан пример конструкции электрического сейсмического вибратора. На фиг. 4 показан в поперечном разрезе еще один пример вибратора. На фиг. 5 показан в поперечном разрезе еще один пример вибратора. На фиг. 6 представлен модельный амплитудный спектр с двумя резонансами. На фиг. 7 представлен пример автокорреляционной функции для одного типа сигнала с прямым расширением спектра. На фиг. 8 представлен пример кода прямого расширения спектра (DSSS). На фиг. 9 представлен график частотного состава сигнала привода сейсмического источника при использовании сигнала, кодированного согласно фиг. 8. На фиг. 10 представлен пример кода прямого расширения спектра с использованием двухпозиционной фазовой модуляции. На фиг. 11 представлен график частотного состава сигнала привода сейсмического источника при использовании сигнала, кодированного согласно фиг. 10. На фиг. 12 А и 12 В представлены соответственно сигнал DSSS и отклик низкочастотного вибратора на приводной сигнал DSSS. На фиг. 13 А и 13 В представлены соответственно сигнал DSSS и отклик на приводной сигнал DSSS вибратора более высокой частоты, чем представленный на фиг. 12 В. На фиг. 14 А и 14 В представлены соответственно комбинированные сигналы DSSS и выходные сигналы двух вибраторов, представленных на фиг. 12 А, 12 В, 13 А и 13 В. На фиг. 15 представлена автокорреляция суммы сигналов фиг. 13 А и 14 А. На фиг. 16 показан пример частотного спектра трех виброисточников, каждый из которых применяется на отличной от других глубине погружения. На фиг. 17 представлена автокорреляционная функция для примера приводного сигнала DSSS, содержащего 255 чипов, с использованием одной операции двухпозиционной фазовой модуляции на чип. На фиг. 18 представлен частотный состав вибратора, управляемого с помощью приводного сигналаDSSS, содержащего 255 чипов и описанного со ссылкой на фиг. 17. На фиг. 19 представлена автокорреляционная функция для того же примера приводного сигналаDSSS, содержащего 255 чипов, фиг. 17, в котором используются две операции двухпозиционной фазовой модуляции на чип. На фиг. 20 представлен частотный состав вибратора, управляемого с помощью приводного сигнала,описанного со ссылкой на фиг. 19. На фиг. 21 показана взаимная корреляция между приводным сигналом, описанным со ссылкой на фиг. 17, и приводным сигналом, описанным со ссылкой на фиг. 19. Сведения, подтверждающие возможность осуществления изобретения Настоящее изобретение относится к способам применения ряда сейсмических вибраторов. Каждый из сейсмических вибраторов, применяемых по способам согласно изобретению, предпочтительно имеет по меньшей мере две резонансные частоты в пределах выбранного сейсмического частотного диапазона,и каждый из вибраторов в группе предпочтительно имеет отличный от других вибраторов частотный диапазон. Нижеследующее описание, во-первых, включает описание специального типа сейсмических вибраторов, который может дать преимущества при использовании по способам согласно изобретению при морской сейсморазведке. За этим описанием следует объяснение специальных типов приводных сигналов, которые могут быть использованы для увеличения частотного диапазона и для обеспечения возможности использовать один и тот же базовый приводной сигнал для выделения эквивалента сейсмической волны от импульсного источника по сигналам, зарегистрированным сейсмическими датчиками. Настоящее изобретение описано со ссылкой на морские сейсмические вибраторы, однако следует понимать, что принципы настоящего изобретения в равной степени применимы к сейсмическим вибраторам, работающим на земной поверхности, вследствие чего объем изобретения не ограничивается использованием морских вибраторов.-3 017312 Пример морской сейсморазведки, проводимой с использованием ряда морских вибрационных источников сейсмических волн, схематически показан на фиг. 1. Сейсморазведочное регистрирующее судно RV показано движущимся по поверхности водоема W, например озера или океана. Сейсморазведочное регистрирующее судно RV обычно везет оборудование, обозначенное RS и для удобства называемое"записывающей системой", которое в выбранные моменты времени активирует один или несколько сейсмических вибраторов 10, определяет геодезическое положение различных компонентов системы сбора сейсмических данных и записывает сигналы, зарегистрированные каждым из ряда сейсмоприемников R. Сейсмоприемники R обычно размещаются в пространственно разнесенных местах вдоль одного или нескольких кабелей сейсмоприемных кос S, буксируемых в выбранном расположении в воде W регистрирующим судном RV (и/или другим судном). Это расположение поддерживается определенным буксировочным оборудованием ТЕ, включающим устройства, называемые "параванами" и создающие боковое усилие для разведения компонентов буксировочного оборудования ТЕ на выбранное боковое расстояние от регистрирующего судна RV. Эта схема буксировочного оборудования ТЕ, параванов Р и кабелей кос S дана для иллюстрации принципа регистрации сейсмических сигналов согласно некоторым особенностям изобретения и никоим образом не ограничивает типы применимых записывающих устройств, варианты их размещения в воде или количество и типы таких компонентов. Регистрирующее судно RV может буксировать сейсмический вибратор 10. В примере фиг. 1 дополнительные сейсмические вибраторы 10 могут буксироваться в выбранном расположении относительно регистрирующего судна RV судами возбуждения SV. Дополнительные вибраторы 10, буксируемые судами возбуждения SV, предназначены для того, чтобы увеличить область прослеживаемых границ в разрезе по сигналам, зарегистрированным сейсмоприемниками R. Количество таких дополнительных вибраторов 10 и их относительное расположение, показанное на фиг. 1, не ограничивают объем изобретения. Кроме того, все или любые вибраторы 10 могут представлять собой ряд близко расположенных сейсмических вибраторов, каждый из которых имеет отличный от других диапазон частотных характеристик. Как будет объяснено ниже со ссылкой на фиг. 16, в некоторых примерах может использоваться ряд вибраторов, каждый из которых имеет отличный от других диапазон частотных характеристик и применяется на глубине, соответствующей частотному диапазону этого вибратора. На фиг. 2 показан пример традиционного выполнения гидравлического морского вибратора. Штуцер подачи гидравлического масла обозначен позицией 35, а штуцер слива масла - позицией 36. Поршень(опорная плита) 31 генерирует акустическую волну давления и расположен внутри колоколообразного кожуха (инертной массы) 38. Пространство между поршнем 31 и колоколообразным кожухом 38 заполнено воздухом 32. Движение поршня 31 регулируется сервоклапаном 34. Акселерометр 33 используется для получения обратной связи или управляющего сигнала. Амортизирующие подвески 37 смонтированы на колоколообразном кожухе 38 для уменьшения вибраций в системе перемещения (не показана), используемой для позиционирования вибратора. Из-за жесткой конструкции вибратора первая резонансная частота такого вибратора обычно превышает верхний предел полосы сейсмических частот, и такой вибратор будет иметь низкую эффективность на типовых сейсмических частотах. На фиг. 3 показан пример другого типа морского вибратора, который может быть использован согласно изобретению. Морской вибратор 10 включает вибрационный источник 20, смонтированный в раме 16. Планка 14 соединена с верхом рамы 16 и включает отверстия 24, которые могут быть использованы для позиционирования вибратора 10 в воде. На фиг. 4 показан в частичном поперечном разрезе пример осуществления вибратора, включающего привод 8, который может быть выполнен как магнитострикционный привод и который в некоторых вариантах может быть изготовлен из сплава тербия, диспрозия и железа. Такой сплав может иметь следующий состав: Tb (0,3) Dy (0,7) Fe (1,9); этот состав известен под товарным знаком "терфенол-Д"(Terfenol-D). Хотя в конкретном описанном здесь примере вибратора показан только один привод, но в объем изобретения входит и вариант осуществления, в котором используется несколько приводов. Далее,настоящий пример включает наружную приводную пружину 3, соединенную с каждым из концов 13 привода 8. В одном из вариантов осуществления настоящего изобретения приводная пружина 3 может иметь эллиптическую форму. В данном примере, в котором привод 8 включает терфенол-Д, привод 8 включает также магнитную цепь (отдельно не показана), создающую магнитное поле, когда в нее подается электрический ток. Это магнитное поле вызывает удлинение терфенола-Д. Длина привода 8 изменяется посредством изменения силы электрического тока и соответственно величины магнитного поля. Обычно для задания магнитного поля смещения, действующего на терфенол-Д, используются постоянные магниты, а изменения магнитного поля создаются подачей меняющегося электрического тока в электрические катушки (не показаны), созданные вокруг терфенола-Д. Изменения длины привода 8 вызывают соответствующие изменения размеров наружной приводной пружины 3. На фиг. 4 показаны дополнительные компоненты вибратора, включая внутреннюю пружину 4 с прикрепленными к ней массами 7. Как будет разъяснено ниже, эта внутренняя приводная пружина 4 с прикрепленными к ней массами 7 может быть включена для получения второй резонансной частоты системы в диапазоне частот, представляющих интерес для сейсмических исследований. Хотя система вибратора, включающего только наружную пружину 3, как правило, имеет вторую резонансную частоту, но-4 017312 у систем с размерами, подходящими для применения в морских геофизических исследованиях, вторая резонансная частота оказалась бы в этом случае значительно выше частот, представляющих интерес для сейсмических исследований (обычно от 0 до 300 Гц). Монтажные стойки 28, показанные на фиг. 4, жестко соединены своими верхними и нижними концами с верхней и нижней концевыми пластинами 18 (показаны на фиг. 3). Привод 8 жестко соединен в своей средней по длине части с монтажными стойками 28 для создания устойчивой опорной точки привода 8. Перемещения концов 13 приводного штока относительно монтажных стоек 28 не ограничены. Пример, показанный на фиг. 4, включает, далее, наружную оболочку 2, с которой наружная пружина 3 соединена посредством передаточных элементов 5. Форму оболочки 2 обычно называют гибконапряженной (flextensional). В одном из вариантов осуществления изобретения наружная оболочка 2 включает две боковины, которые могут быть, по существу, зеркальными отражениями друг друга и включают две концевые балки 1, причем боковины оболочки 2 шарнирно соединены с концевыми балками 1 шарнирами 6. На фиг. 4 показана одна из боковин наружной оболочки 2, обозначенная как оболочечная боковина 2 а. В полностью собранном устройстве вторая оболочечная боковина (не показана на фиг. 4), по существу, представляющая собой зеркальное отражение оболочечной боковины 2 а, шарнирно соединена шарнирами 6 с концевыми балками 1, завершая полную гибконапряженную оболочку, окружающую смонтированные привод 8, наружную пружину 3 и внутреннюю пружину 4. На фиг. 5 показан поперечный разрез узла фиг. 4, смонтированного в морском вибраторе 10. Как показано на фиг. 3, морской вибратор 10 далее включает верхнюю и нижнюю концевые пластины 18. В сборе наружная оболочка 2, включающая две боковины, и две концевые балки 1 герметично соединены с верхней и нижней концевыми пластинами 18. Хотя наружная оболочка 2 герметично связана с верхней и нижней концевыми пластинами 18, однако, когда морской вибратор 10 работает, наружная оболочка 2 допускает перемещение относительно концевых пластин 18, так что соединение концевых пластин 18 и наружной оболочки 2 должно быть гибким; такое соединение может быть обеспечено,например, гибкой мембраной 22 (в подробностях не показана). На фиг. 6 показаны результаты моделирования методом конечных элементов примера вибратора. Первая резонансная частота 11, по существу, определяется взаимодействием наружной пружины 3 и привода. Вторая резонансная частота 12, по существу, определяется взаимодействием внутренней приводной пружины 4 с добавленными массами 7 и привода 8. Наружная приводная пружина 3 и внутренняя приводная пружина 4, показанные на фиг. 6, могут отличаться по типу от изображенных. Например, пружины могут быть винтовыми пружинами или пружинами иного типа, работающими, по существу, аналогично. По существу, пружины 3 и 4 - это устройства смещения, создающие силу, связанную с величиной подвижки устройства смещения. Аналогично,для достижения существенно того же результата наружная пружина 3 и внутренняя приводная пружина 4 могут включать диафрагму, поршень в цилиндре с уплотнением или гидравлический цилиндр. Посредством введения резонанса в нижний край спектра сейсмических частот можно более эффективно генерировать низкочастотную акустическую волну. При резонансе мнимая (реактивная) часть импеданса существенно обнуляется, и акустический источник способен эффективно возбуждать акустическую волну в воде. Как известно специалистам, для определения первой и второй резонансных частот при проектировании любого конкретного варианта осуществления морского вибратора может быть использован метод конечных элементов. При любом применении этого метода придерживаются следующих принципов. Если наружная оболочка моделируется диском, то для низких частот инерционная нагрузка, или эквивалентная жидкая масса, действующая на оболочку, может быть выражена как где М - инерционная нагрузка; р 0 - плотность воды и а - радиус эквивалентного диска, соответствующего размеру наружной оболочки. Наружная оболочка 2 имеет коэффициент трансформации Tshell, связывающий длинную и короткую оси ее эллипса, так что прогиб двух боковин оболочки (боковины 2 а на фиг. 4 и ее зеркального отражения с другой стороны наружной оболочки 2) будет иметь большую амплитуду, чем прогиб концевых балок 1 (связывающих друг с другом две боковины оболочки 2), вызванный перемещением передаточного элемента 5. Далее, наружная пружина 3 создает большую инерционную нагрузку на привод 8, так как эта наружная пружина 3 также имеет коэффициент трансформации, связывающий длинную и короткую оси ее эллипса, при этом длинная ось, по существу, равна длине привода 8, а короткая ось - это ширина данной эллиптической пружины. Обозначив ее коэффициент трансформации Tspring, получим инерционную нагрузку на привод 8 в следующем виде:-5 017312 Частота первого резонанса fresonance данного вибратора существенно определяется следующим соотношением для массивной пружины:Mouter - инерционная нагрузка на привод 8;K - жесткость сочетания наружной пружины 3 с приводом 8, где наружная пружина 3 соединена с наружной оболочкой 2 посредством передаточных элементов 5, концевой балки 1 и шарниров 6. Для достижения эффективной передачи энергии в диапазоне частот, представляющих интерес для сейсмических исследований, важно выполнить вибратор так, чтобы получить вторую резонансную частоту в этом диапазоне частот, представляющих интерес для сейсмических исследований. В отсутствие внутренней пружины вторая резонансная частота возникает как вторая частота собственных колебаний,когда наружная приводная пружина 3 взаимодействует с приводом 8. Однако эта резонансная частота,как правило, намного выше первой резонансной частоты и соответственно оказывается вне диапазона частот, представляющих интерес для сейсмических исследований. Как видно из вышеприведенного соотношения, резонансная частота снижается с увеличением инерционной нагрузки на наружную пружину 3. Инерционная нагрузка может быть увеличена добавлением массы к приводу 8, однако чтобы такой добавкой получить вторую резонансную частоту в диапазоне частот, представляющих интерес для сейсмических исследований, величина необходимой добавки массы к приводу сделала бы подобную систему практически неприменимой для морских сейсмических исследований. В практическом примере вибратора внутри наружной приводной пружины 3 включена вторая пружина, внутренняя приводная пружина 4,с добавленными массами 7 на боковой части внутренней пружины 4. По своему воздействию добавление таких масс эквивалентно добавлению массы на конце привода 8 Эта дополнительная пружина, т.е. внутренняя приводная пружина 4, также имеет свой коэффициент трансформации Tinner и увеличивает инерционную нагрузку на привод 8. Использование внутренней пружины 4 с добавленными массами позволяет настроить второй резонанс системы так, чтобы вторая резонансная частота оказалась в диапазоне частот, представляющих интерес для сейсмических исследований, повышая тем самым КПД вибратора в сейсмической полосе частот. Эта вторая резонансная частота может быть определена выражением где Kinner - жесткость внутренней пружины иKdriver - жесткость пружины наружного узла привода. Возможным преимуществом использования описанной в настоящем документе конструкции привода является то, что множественные резонансные частоты могут дать более широкую полосу частот сигнала отклика, чем та, какую можно получить при использовании конструкций вибратора с единственным резонансом. Особое преимущество использования вибратора с электрическим возбудителем (приводом) заключается в более линейном отклике вибратора на входной управляющий сигнал. Это может позволить использовать специальные типы приводных сигналов, объясняемые ниже. При использовании системы, показанной на фиг. 1, может дать преимущество существенно одновременное или даже одномоментное использование более чем одного сейсмического вибратора 10, для того чтобы увеличить возможную эффективность получения сейсмических сигналов, связанных с формациями геологической среды (под подошвой слоя воды). В этом случае сейсмические сигналы, зарегистрированные каждым из приемников R, дадут в результате сейсмическую волну, вклад в которую даст каждый из вибраторов 10, реально работавших в момент записи сигналов. В других примерах одновременное применение вибраторов может включать привод каждого вибратора сигналом "с прямым расширением спектра". Для генерации сигнала с прямым расширением спектра(сигнала DSSS: direct sequence spread spectrum - спектр, расширенный прямой последовательностью) используется модулированный кодированный сигнал с частотой "чипов", выбранной так, чтобы определить частотный состав (полосу частот) переданного сигнала. "Чип" означает имеющую форму импульса часть сигнала, кодированного прямой последовательностью. Сигналы с прямым расширением спектра могут также быть созданы соответствующим выбором частоты чипов и формы модулирующего сигнала, чтобы результирующий сигнал DSSS имел спектральные характеристики, подобные фоновому шуму. В настоящем изобретении один и тот же сигнал DSSS может использоваться для привода каждого из ряда вибраторов. Приводной сигнал, используемый для непосредственного управления каждым вибратором, может модулироваться с помощью уникального количества операции двухпозиционной фазовой модуляции на каждый чип в кодируемой последовательности. Количество операций двухпозиционной фазовой модуляции для каждого чипа можно выбирать для получения эквивалента уникальной час-6 017312 тоты чипа и, тем самым, частотного состава приводного сигнала при использовании приводного сигнала для управления каждым вибратором из ряда вибраторов. Изложенное выше более подробно объясняется далее со ссылкой на фиг. 17-20. Пример осуществления сигнального генератора для создания специальных типов вибраторных сигналов, применяемых в настоящем изобретении, схематически показан на фиг. 1 А. Гетеродин 30 генерирует сигнал несущей в полосе модулирующих частот. В одном из примеров сигналом несущей в полосе модулирующих частот может быть импульс постоянного тока выбранной длительности или непрерывный постоянный ток. В других примерах модулирующим сигналом может быть свип или ЛЧМ-сигнал,применяемые в традиционной вибросейсмической разведке, например, с изменением частоты в диапазоне от 10 до 150 Гц. Генератор псевдослучайных чисел ("ПСЧ") или кодовый генератор 32 генерирует последовательность чисел +1 и -1 согласно определенным типам кодирующих схем, как будет объяснено ниже. Выходной сигнал генератора ПСЧ 32 и выходной сигнал гетеродина 30 смешиваются в модуляторе 34. Выход модулятора 34 подается на усилитель мощности 36, выходной сигнал которого, в конечном счете, управляет одним из сейсмических вибраторов 10. Аналогичное исполнение может быть применено для управления каждым из ряда вибраторов, например, показанных на фиг. 1. Сигналы, сформированные устройством, показанным на фиг. 1 А, могут быть зарегистрированы с использованием такого устройства, как показано на фиг. 1 В. Каждый из сейсмоприемников R может быть соединен с предусилителем 38 или непосредственно, или через подходящий мультиплексор (не показан). Выходной сигнал предусилителя 38 может быть переведен в цифровую форму в аналоговоцифровом преобразователе ("АЦП") 40. Модулятор 42 смешивает выходной сигнал АЦП 40 с идентификационным кодом, сформированным генератором ПСЧ 32. Как будет объяснено ниже, устройство генерирования сигналов, показанное на фиг. 1 А, и соответствующее ему устройство выделения сигналов,показанное на фиг. 1 В, генерируют и выделяют сигналы DSSS. Теоретическое объяснение генерирования и детектирования сигнала DSSS может быть понято следующим образом. Сигнал DSSS, обозначаемый ui, может быть сформирован с использованием "расширяющего спектр кода", обозначаемого ci и генерируемого, например, генератором ПСЧ (32 на фиг. 1 А),для модуляции несущей в полосе модулирующих частот. Несущая в полосе модулирующих частот может генерироваться, например, гетеродином (30 на фиг. 1 А). Эта несущая имеет форму, обозначаемую(t). Расширяющий код включает отдельные элементы cij (называемые "чипами"), каждый из которых равен +1 или -1 при 0jN и равен 0 для всех остальных значений j. Если используется надлежащим образом запрограммированный генератор ПСЧ, код будет повторяться после прохождения выбранного числа чипов; N - длина кода (число чипов) до его повторения. Несущая в полосе модулирующих частот предпочтительно центрирована относительно момента времени t=0, и ее амплитуда нормирована так,чтобы в момент времени t=0 амплитуда несущей равнялась единице, т.е. 0)=1). Время появления каждого чипа i в расширяющем коде может быть обозначено Тс. Таким образом, сигнал, применяемый для привода каждого вибратора, может быть определен выражением Форма сигнала ui(t) детерминирована так, что ее автокорреляционная функция определяется выражением где- временная задержка между коррелированными сигналами. Дискретная периодическая автокорреляционная функция для а=aj определяется выражением Используя формулу типа выражения 17, можно определить функцию взаимной корреляции двух различных сигналов выражением-7 017312 Дискретная периодическая функция взаимной корреляции для a=aj и b=bj определяется выражением Сигнал, зарегистрированный приемниками (R на фиг. 1), будет включать возбужденную одним из вибраторов сейсмическую волну, по которой должна быть получена сейсмическая информация, а также несколько типов интерференционных сигналов, например фоновый шум, обозначаемый n(t), и волны,возбужденные другими вибраторами, работавшими в то же время, но с отличающимися кодами прямого расширения спектра (обозначаемые Ck(t), где ki). Сигнал каждого из приемников, обозначаемый xi(t),это сигнал, зарегистрированный каждым из приемников (R на фиг. 1) в системе с М сейсмическими вибраторами, работающими в одно и то же время; он может быть описан выражением Волны каждого вибратора проникают в формации геологической среды под подошвой слоя воды(или под земной поверхностью), и отраженные в геологической среде сигналы регистрируются приемниками по прошествии времени "двукратного пробега" волны; это время зависит от расположения вибраторов и приемников, а также от распределения скоростей сейсмических волн в воде и в геологической среде под подошвой слоя воды (или земной поверхностью). Если возбужденный вибратором сигнал i с кодом прямого расширения спектра передается в момент времени t=t0, то принятый сигнал отклика на него появляется после передачи в момент времени t=k+lkTc+t0, где lk - любое целое число, а k - расхождение между принятым сигналом и временем чипа Тс. Принятый сигнал может быть смешан с идентификационным расширяющим кодом, использованным для формирования выходного сигнала ui(t0) каждого вибратора, как показано на фиг. 1 В. Такое смешивание даст сигнал, который может быть скоррелирован с сигналом, использованным для привода каждого отдельного вибратора. Смешанный выходной сигнал может быть использован для определения соответствующего сейсмического отклика на сигнал, возбужденный каждым вибратором. Для зарегистрированных сигналов вышеуказанное может быть выражено следующим образом: Смешивание (фиг. 1 В) зарегистрированных сигналов с расширяющим кодом дает корреляцию. Результат этой корреляции таков:-8 017312 Если R(0)=N и (0)=1, вышеуказанное выражение упрощается и принимает вид: Выражение (25) показывает, что можно разделить, с одной стороны, сигналы с прямым расширением спектра, соответствующие каждому расширяющему коду, и, с другой, сигнал, включающий компоненты нескольких расширяющих кодов. N, по существу, представляет собой автокорреляционную функцию переданного сигнала, и, если использовать существенно ортогональные или некоррелированые сигналы с расширением спектра для привода каждого морского вибратора, взаимная корреляция между ними будет очень мала по сравнению с N. Другое возможное преимущество заключается в том, что любая помеха, появляющаяся в части временного интервала записи сейсмических сигналов, будет усреднена с расчетом на всю длину записи и тем самым уменьшена, что можно видеть из выражения (25). На практике сейсмический отклик геологической среды на возбужденную каждым из вибраторов сейсмическую волну может быть определен как функция взаимной корреляции зарегистрированных сейсмических сигналов с сигналом, использованным для привода каждого вибратора, где взаимная корреляция включает интервал выбранных временных задержек; как правило, это интервал от нуля до ожидаемого максимального времени двукратного пробега сейсмической волны для представляющих интерес формаций геологической среды (обычно это примерно 5-6 с). Выходной сигнал взаимной корреляции может быть сохранен и/или представлен в формате сейсмотрасс с амплитудой взаимной корреляции в функции от времени задержки. Несущая в полосе модулирующих частот имеет два свойства, которые могут быть оптимизированы. Эта несущая должна быть выбрана так, чтобы обеспечить выходной сигнал вибратора с подходящим частотным составом и автокорреляционную функцию с хорошо определенным корреляционным пиком. Выражение (25) показывает также, что длина последовательности прямого расширения спектра влияет на отношение сигнал/помеха сигнала вибратора. Корреляционные пики, являющиеся результатом взаимной корреляции, выполненной, как объяснено выше, линейно возрастают пропорционально длине (числу чипов) расширяющего кода. Увеличение N (удлинение последовательностей) улучшает свойства сигнала вибратора в плане отношения сигнал/помеха. Используя надлежащим образом выбранные последовательности расширяющего кода, можно генерировать сейсмические сигналы, приближающиеся по спектральной статистике к фоновому шуму. Некоторые полезные последовательности, которые могут быть применены для ряда сейсмических вибраторов,обсуждаются ниже. Последовательности "максимальной длины" - это тип циклического кода, который генерируется с использованием линейного сдвигового регистра из m последовательно соединенных ячеек, причем выходы определенных ячеек прибавляются по модулю 2 и подаются в качестве сигнала обратной связи на вход сдвигового регистра. Своим наименованием последовательность "максимальной длины" обязана тому факту, что это наиболее длинная последовательность, которая может генерироваться с использованием сдвигового регистра. Математически такая последовательность может быть выражена полиномомh(x) Для 1jm он имеет значение hj=1, если на j-й ячейке имеется обратная связь, и hj=0, если на j-й ячейке не имеется обратной связи, h0=hm=1. Причем ячейка hj, которую следует установить на единицу или на ноль, не случайна, а должна быть выбрана так, чтобы h(x) становился простым полиномом. Термин "простой" означает, что полином h(x) не может быть факторизован. Число чипов для последовательности максимальной длины дается выражением N=2m-1, где m представляет собой число ячеек в сдвиговом регистре. В последовательности максимальной длины значений "1" на одно больше, чем значений"0". Так, например, в последовательности из 511 чипов 256 единиц и 255 нулей. Другой тип последовательности, который может быть использован, это последовательность Голда(Gold). Структура последовательности Голда описана в работе R. Gold, Optimal binary sequences forspread spectrum multiplexing, IEEE Trans. Information Theory, vol. IT-13, p. 619-621 (1967). Последовательности Голда обладают хорошими характеристиками взаимной корреляции, подходящими для применения в случаях, когда в одно и то же время используется более чем один вибратор. Последовательности Голда генерируются с использованием двух или более последовательностей максимальной длины. Из последовательностей максимальной длины можно сформировать N+2 последовательности Голда, гдеN - это длина последовательности. Последовательности Голда имеют период N=2m-1 и определены для-9 017312 всех целых чисел m, не кратных 4. Возможно, недостатком последовательности Голда является то, что ее автокорреляционная функция не так хороша, как в последовательности максимальной длины. В некоторых примерах могут быть использованы ансамбли последовательностей Касами (Kasami),поскольку у них очень низка взаимная корреляция. Существуют два отличающихся друг от друга ансамбля последовательностей Касами. Процедура, подобная той, что использовалась для генерирования последовательностей Голда, формирует "малый ансамбль" последовательностей Касами из М=2n/2 двоичных последовательностей с периодом N=2n-1, где n - четное целое число. Такая процедура начинается с последовательности максимальной длины, обозначенной a, и прореживанием ее по значениям 2n/2+1 формируется последовательность a'. Можно показать, что результирующая последовательность а' - это максимальная последовательность с периодом 2n/2-1. Так, например, если n=10, то a имеет периодN=1023, и период a' равен 31. Таким образом, рассматривая 1023 бита последовательности a', увидим 33 повторения 31-битовой последовательности. Тогда, взяв N=2n-1 битов последовательностей a и a', можно сформировать новый ансамбль последовательностей, добавляя, по модулю 2, биты из a, биты из a' и все 2n/2-2 циклических сдвига битов из a'. После включения а в ансамбль получим ансамбль из 2n/2 двоичных последовательностей длиной N=2n-1. Автокорреляционные функции и функции взаимной корреляции этих последовательностей принимают значения из множества -1, -(2n/2+1), 2n/2-1. "Большой ансамбль" последовательностей Касами также включает последовательности с периодом 2n -1, где n - четное целое число, кроме того, включает в качестве подмножеств как последовательности Голда, так и малый ансамбль последовательностей Касами. См., например, Spreading Codes for Direct Sequence CDMA andWideband CDMA Cellular Networks, IEEE Communications Magazine, Sept. 1998. При реализации расширяющих кодов для генерации приводных сигналов вибраторов может оказаться предпочтительно генерировать чипы в коде, используя двухпозиционную фазовую модуляцию. На фиг. 8 представлен пример расширяющего кода, в котором код представлен рядом чисел +1 и -1. Спектр сигнала, сформированного вышеуказанным расширяющим кодом, показан на фиг. 9. Как видно из фиг. 9,имеется существенная амплитуда сигнала при постоянном токе (на нулевой частоте). Такой спектр в общем случае не подходит для генерации сейсмического сигнала. Однако если используется двухпозиционная фазовая модуляция, то амплитуда сигнала при нулевой частоте, по существу, равна нулю. Тот же расширяющий код, который показан на фиг. 8, но реализованный с использованием двухпозиционной фазовой модуляции, показан на фиг. 10. Двухпозиционная фазовая модуляция может быть осуществлена представлением каждого бита исходного входного сигнала (чипов в расширяющем коде, каждый из которых принимает значение +1 или -1) в виде двух логических состояний, которые вместе формируют чип. Каждая логическая единица "+1" во входном сигнале может быть представлена, например, как изменение полярности с -1 на +1. Каждая логическая единица "-1" в настоящем примере может быть представлена как изменение полярности с +1 на -1. На фиг. 11 представлен спектр сигнала расширяющего кода, показанного на фиг. 10. При нулевой частоте амплитуда сигнала равна нулю, что делает такой код более подходящим для генерации сейсмической волны. Как более подробно объясняется ниже со ссылкой на фиг. 17-20, выход модулятора (позиция 42 на фиг. 1 В) может быть далее модифицирован таким образом, чтобы выбранное количество упомянутых выше операций двухпозиционной фазовой модуляции (т.е. изменения полярности с -1 на +1, и наоборот) может выполняться в целях представления каждой логической +1 или -1 (чипа) входного сигнала DSSS. В одном примере один и тот же код DSSS может использоваться в качестве приводного сигнала для управления рябом вибраторов. Количество операций модуляции на чип, применяемое к одному и тому же коду DSSS, выбирается уникальным и используется для модулирования приводного сигнала для каждого из ряда вибраторов. Пример низкочастотного кода DSSS, применяемого для привода надлежащим образом выполненного вибратора, показан на фиг. 12 А. Код DSSS может быть сформирован с возможностью получения выбранного частотного выхода при соответствующем выборе частоты следования чипов. Спектр выходного сигнала надлежащим образом выполненного вибратора при использовании кода фиг. 12 А показан на соответствующей фиг. 12 В. На фиг. 13 А представлен код DSSS, примененный для привода вибратора, выполненного для работы на более высоких частотах. Отклик такого вибратора (спектр выходного сигнала) на код DSSS фиг. 13 А показан на фиг. 13 В. Оба сейсмических сигнала эффективно суммированы. После выделения сигнала каждого такого вибратора в принятых сейсмических сигналах, как объяснено выше,выделенные сигналы могут быть суммированы. Объединенные сигналы DSSS показаны на фиг. 14 А, а объединенный спектр выхода вибратора показан на фиг. 14 В. Функция автокорреляции суммированных сигналов показана на фиг. 15; видны два отдельных корреляционных пика, по одному на каждый кодDSSS. Различные вибраторы могут работать в воде на выбранных глубинах, соответствующих частотному диапазону каждого из вибраторов. Как объяснено в начале настоящего описания, в некоторых примерах может использоваться более чем один вибратор в любом конкретном месте в воде, например, как показано на фиг. 1 позицией 10; буксировка может осуществляться сейсморазведочным судном, а также, как показывает позиция 10, одним или несколькими судами возбуждения. В таких схемах с множественными вибраторами каждый из вибраторов, показанный на фиг. 1 позицией 10, может быть заменен двумя или несколькими морскими сейсмическими вибраторами ("группой" вибраторов), выполненными согласно настоящему описанию,- 10017312 см. фиг. 3-6. В данном примере каждая из таких групп вибраторов, расположенная отдельно от других,включает два или несколько вибраторов, каждый из которых имеет свою, отличную от других частотную характеристику. Частотную характеристику конкретного вибратора можно задать, например, как объяснено выше со ссылкой на фиг. 3-5, соответствующим выбором массы наружной оболочки, дополнительных масс и жесткости внутренней и наружной пружин. В общем случае в морской сейсморазведке применяются источники в частотном диапазоне примерно 1-100 Гц. В некоторых примерах группа вибраторов может включать вибратор низкочастотного диапазона для генерации низкочастотной части сейсмического сигнала (например, на частотах 3-25 Гц) и другой вибратор более высокочастотного диапазона для генерации сейсмической волны более высокой частоты (например, 25-100 Гц). Как объяснено выше, морской вибратор описанного типа может иметь две или более резонансные частоты в пределах сейсмической полосы частот. Для достижения высокой эффективности всех вибраторов группы каждый из вибраторов может быть выполнен с возможностью высокоэффективного отклика в пределах лишь выбранной части представляющего интерес сейсмического частотного диапазона. Использование ряда вибраторов, каждый из которых имеет сравнительно узкий,но отличный от других частотный диапазон отклика, обеспечивает более эффективную работу каждого вибратора группы. В специальном примере осуществления для того, чтобы улучшить акустический выход группы, можно буксировать каждый из вибраторов группы на выбранной для него отличной от других глубине. Далее, как объяснено выше, можно также приводить каждый из вибраторов группы приводным сигналом соответствующего частотного диапазона. Приводя каждый вибратор приводным сигналом частотного диапазона, соответствующего частотному диапазону вибратора, можно оптимизировать выходной сигнал каждого вибратора группы. Взятая для примера группа вибраторов включает три вибратора, выполненных как объяснено выше со ссылкой на фиг. 3-5, причем вибраторы применяются в следующих частотных диапазонах: вибратор 1: 5-15 Гц; вибратор 2: 15-45 Гц; вибратор 3: 45-120 Гц. В одном примере каждый вибратор буксируется на такой глубине, что амплитуда сейсмической волны, распространяющейся вниз (к подошве водного слоя) от каждого вибратора, усиливается благодаря эффекту отражения сейсмической волны от поверхности воды (т.е. волны-спутника). Буксируя вибраторы на таких глубинах, можно с помощью отраженной от поверхности волны-спутника достичь увеличения выходного сигнала группы на величину до 6 дБ. Пример отклика группы из трех вибраторов с надлежащим образом выбранными глубинами погружения вибраторов графически представлен на фиг. 16. Кривые на фиг. 16 представляют выходные сигналы трех вышеуказанных вибраторов, буксируемых на глубинах 30, 15 и 7 м; на фиг. 16 они соответственно обозначены позициями 50, 52 и 54. Из фиг. 16 видно, что, применяя морские вибраторы с соответствующим образом выбранной частотной характеристикой при соответствующим образом выбранной глубине погружения каждого из таких вибраторов,можно использовать отраженную от поверхности волну-спутник для усиления сейсмической волны, распространяющейся вниз от каждого вибратора группы. Для того чтобы заставить выход вибраторов каждый группы работать как одиночный источник сейсмических волн (и тем самым суммировать выходные сигналы вибраторов, показанных на фиг. 16),необходимо также учесть задержки, вызванные различием глубин применения вибраторов. Суммирование сигналов источников требует использования выражений, подобных приведенным ниже (если скорость звука в воде принимается равной 1500 м/с), для компенсации различия глубин погружения вибраторов: Вибратор 1(t) + Вибратор 2(t+dt источник 2) + Вибратор 3(t+dt источник 3);dt вибратор 3 = (глубина вибратора 1 - глубина вибратора 3)/1500. В результате применения группы вибраторов, выбора из группы вибраторов со специальными частотными характеристиками и использования каждого вибратора на глубине, соответствующей его частотной характеристике, достигается оптимизация как частотной характеристики вибратора, так и глубины, на которой следует буксировать каждый вибратор для получения максимальной энергии волны, возбуждаемой в геологической среде. Пример использования различного количества операций двухпозиционной фазовой модуляции на каждый чип приводного сигнала DSSS объясняется со ссылкой на фиг. 17. На фиг. 17 представлена автокорреляционная функция максимальной длины (объяснявшейся выше) кода DSSS, содержащего 255 чипов, причем каждый чип модулируется с помощью одной операции двухпозиционной фазовой модуляции. Когда такой сигнал используется для привода сейсмического вибратора, имеющего частотный диапазон, например, 6-35 Гц, итоговый спектр выходного сигнала такого вибратора показан на фиг. 18. На фиг. 19 представлена автокорреляционная функция для того же кода DSSS максимальной длины, состоящего из 255 чипов, но на этот раз модулируемого с использованием двух операций двухпозиционной фазовой модуляции на чип. Длина чипа постоянна. Если такой сигнал используется для привода- 11017312 вибратора, имеющего частотный диапазон, например, 35-70 Гц, итоговый спектр выходного сигнала такого вибратора показан на фиг. 20. На фиг. 21 показано, что взаимная корреляция между приводным сигналом DSSS, модулируемого с помощью одной операции двухпозиционной фазовой модуляции на чип, и этого же сигнала DSSS, модулируемого с помощью двух операций двухпозиционной фазовой модуляции на чип, может быть достаточно низкой, чтобы сделать возможным уникальное определение конкретного вибратора, который является источником сейсмической волны в сигналах, регистрируемых сейсмоприемниками (R на фиг. 1). При практическом осуществлении способа, описанного выше, количество операций двухпозиционной фазовой модуляции на чип можно выбирать в соответствии с частотным диапазоном данного вибратора. Сейсмические вибраторы и способы управления такими вибраторами согласно различным особенностям настоящего изобретения могут обеспечить более устойчивый к внешним воздействиям прием сейсмических сигналов, могут уменьшить нежелательное воздействие сейсмический геологоразведки на окружающую среду путем распределения сейсмической волны на сравнительно широкий интервал частот и могут увеличить эффективность сейсмической геологоразведки, позволяя использовать одновременно несколько сейсмических источников и в то же время регистрировать сейсмический отклик на каждый из этих сейсмических источников в отдельности. Хотя изобретение описано с использованием ограниченного числа вариантов осуществления, специалисты, воспользовавшись раскрытым изобретением, смогут вывести из настоящего описания другие варианты осуществления, не отступающие от объема раскрытого изобретения. Соответственно, объем изобретения ограничивается только прилагаемой формулой. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ генерирования сейсмической волны при разведке геологической среды, включающий следующие шаги: применяют первый сейсмический вибратор над исследуемым участком геологической среды и применяют, по меньшей мере, второй сейсмический вибратор над тем же участком, по существу,одновременно с применением первого сейсмического вибратора,причем каждый из первого и второго сейсмических вибраторов имеет выбранный, отличный от других диапазон частотных характеристик и каждым из первого и второго сейсмических вибраторов управляет один и тот же приводной сигнал с прямым расширением спектра,при этом для каждого вибратора выбирают различное количество операций модуляции для каждого логического значения в сигнале с прямым расширением спектра. 2. Способ по п.1, отличающийся тем, что каждое количество операций модуляции выбирают в соответствии с диапазоном частотных характеристик каждого вибратора. 3. Способ по п.1, отличающийся тем, что сигнал с прямым расширением спектра включает по меньшей мере один из следующих кодов последовательностей: код последовательности максимальной длины, код последовательности Голда и код последовательности Касами. 4. Способ по п.1, отличающийся тем, что каждый вибратор имеет по меньшей мере две резонансные частоты в выбранной полосе частот. 5. Способ по п.1, отличающийся тем, что участок геологической среды включает водный слой, причем время активации каждого вибратора соответствует глубине, на которой применяют каждый вибратор в водном слое, так что первый и, по меньшей мере, второй вибраторы работают как группа вибраторов. 6. Способ по п.5, отличающийся тем, что каждый из вибраторов применяют на такой глубине, что отраженная от поверхности волна-спутник усиливает направленный вниз выходной сигнал каждого вибратора в пределах выбранного частотного диапазона. 7. Способ по п.1, отличающийся тем, что операция модуляции включает двухпозиционную фазовую модуляцию. 8. Способ сейсморазведки геологической среды, включающий следующие шаги: применяют ряд сейсмических вибраторов, каждый из которых имеет выбранный, отличный от других диапазон частотных характеристик, над исследуемым участком геологической среды; регистрируют сейсмические сигналы, поступающие от ряда вибраторов, каждым из ряда сейсмоприемников, расположенных в пространственно разнесенных местах над этим участком; при этом каждым вибратором управляет один и тот же приводной сигнал с прямым расширением спектра; при этом для каждого вибратора выбирают различное количество операций модуляции для каждого логического значения в приводном сигнале; определяют сейсмическую волну, поступающую от каждого из ряда вибраторов, в зарегистрированных сейсмических сигналах. 9. Способ по п.8, отличающийся тем, что каждое количество операций модуляции выбирают в соответствии с диапазоном частотных характеристик каждого вибратора.- 12017312 10. Способ по п.8, отличающийся тем, что сигнал с прямым расширением спектра включает по меньшей мере один из следующих кодов последовательностей: код последовательности максимальной длины, код последовательности Голда и код последовательности Касами. 11. Способ по п.8, отличающийся тем, что каждый вибратор имеет по меньшей мере две резонансные частоты в выбранной полосе частот. 12. Способ по п.8, отличающийся тем, что участок геологической среды включает водный слой,причем время активации каждого вибратора соответствует глубине, на которой применяют каждый вибратор в водном слое, так что первый и, по меньшей мере, второй вибраторы работают как группа вибраторов. 13. Способ по п.12, отличающийся тем, что каждый из вибраторов применяют на такой глубине, что отраженная от поверхности волна-спутник усиливает направленный вниз выходной сигнал каждого вибратора в пределах выбранного частотного диапазона.
МПК / Метки
МПК: G01V 1/02
Метки: сигнала, группы, двухпозиционной, приводного, каждом, вибраторов, фазовой, расширением, использованием, сейсмических, генерации, способ, чипе, модуляции, спектра
Код ссылки
<a href="https://eas.patents.su/21-17312-sposob-generacii-privodnogo-signala-s-rasshireniem-spektra-dlya-gruppy-sejjsmicheskih-vibratorov-s-ispolzovaniem-dvuhpozicionnojj-fazovojj-modulyacii-v-kazhdom-chipe-privodnogo-sig.html" rel="bookmark" title="База патентов Евразийского Союза">Способ генерации приводного сигнала с расширением спектра для группы сейсмических вибраторов с использованием двухпозиционной фазовой модуляции в каждом чипе приводного сигнала</a>
Способ непрерывного качания частоты и разделения нескольких сейсмических вибраторов
Номер патента: 8398
Опубликовано: 27.04.2007
Авторы: Джонсон Марвин Л., Крон Кристин Э.
МПК: G01V 1/28
Метки: качания, нескольких, вибраторов, разделения, непрерывного, способ, частоты, сейсмических
Формула / Реферат:
1. Способ работы множества N сейсмических вибраторов одновременно с непрерывными свип-сигналами и выделения сейсмического отклика для каждого вибратора, заключающийся в том, что (a) загружают каждый вибратор уникальным непрерывным свип-сигналом, состоящим из M_N сегментов, при этом i-й сегмент имеет одну и ту же длительность для каждого вибратора, i=1, 2, ..., М, (b) возбуждают все вибраторы и используют по меньшей мере один датчик для...
Способ передискретизации цифрового сигнала при передаче и приёме со смещением спектра цифрового сигнала
Номер патента: 8651
Опубликовано: 29.06.2007
Авторы: Бласко Кларет Хорхе Висенте, Ривейро Инсуа Хуан Карлос, Гарсиа Сан Хосе Альтор, Ирансо Молинеро Сальвадор
МПК: H03M 7/00
Метки: цифрового, передискретизации, приёме, способ, сигнала, смещением, передаче, спектра
Формула / Реферат:
1. Способ передискретизации цифрового сигнала при передаче и приеме со сдвигом спектра цифрового сигнала, включающий при передаче обработку сигнала во временной области, перенос частоты и преобразование цифрового сигнала в аналоговый посредством цифроаналогового преобразователя (ЦАП), а при приеме - дискретизацию сигнала посредством аналого-цифрового преобразователя (АЦП), сдвиг спектра сигнала и обработку сигнала во временной области,...
Способ нормализованной когерентной амплитудной и относительной фазовой модуляции для многопользовательских систем связи
Номер патента: 9970
Опубликовано: 28.04.2008
Авторы: Баденес-Корелла Агустин, Ривейро Инсуа Хуан Карлос, Бласко Кларет Хорхе Висенте
МПК: H04J 11/00, H04L 27/34
Метки: когерентной, модуляции, амплитудной, многопользовательских, нормализованной, связи, относительной, фазовой, способ, систем
Формула / Реферат:
1. Способ нормализованной модуляции, относительной по фазе и когерентной по амплитуде, применимый в системе двусторонней связи между несколькими пользовательскими устройствами с использованием относительной по фазе и когерентной по амплитуде модуляции, предусматривающей передачу символа опорной фазы до передачи информации, отличающийся тем, что получают информацию, которую предстоит модулировать, выбирают модулируемую информацию, согласно...
Способ геометрической гармонической модуляции сигнала
Номер патента: 8786
Опубликовано: 31.08.2007
Авторы: Соколов Юрий Борисович, Сахаров Валерий Викторович
МПК: H04B 3/54, H04L 27/18
Метки: сигнала, модуляции, способ, геометрической, гармонической
Формула / Реферат:
Способ геометрической гармонической модуляции сигнала, состоящего из множества равноотстоящих друг от друга по частоте гармоник, отличающийся тем, что для кодирования каждого символа передаваемых данных используется уникальное случайное или псевдослучайное множество разностей начальных фаз ближайших пар вышеуказанных гармоник, при этом указанные множества разностей начальных фаз выбираются таким образом, чтобы минимизировать пик-фактор...
Способ уменьшения разброса результатов оценки отношения сигнал-шум для сигнала с относительной фазовой и когерентной амплитудной модуляцией
Номер патента: 9251
Опубликовано: 28.12.2007
Авторы: Ривейро Инсуа Хуан Карлос, Бласко Кларет Хорхе Висенте, Баденес Корелья Агустин
МПК: G01R 29/26, H04L 1/20
Метки: амплитудной, отношения, уменьшения, оценки, когерентной, модуляцией, сигнал-шум, фазовой, сигнала, результатов, разброса, относительной, способ
Формула / Реферат:
1. Способ уменьшения разброса результатов оценки отношения сигнал-шум для сигнала, модулированного посредством относительной фазовой и когерентной амплитудной модуляции, применимый в системе двусторонней связи между несколькими пользовательскими устройствами с использованием относительной по фазе и когерентной по амплитуде модуляции (АОФМн), предусматривающей передачу символа опорной фазы до передачи информации, а также оценивание отношения...
Предыдущий патент: Получение нанесенного хромсодержащего катализатора и способ полимеризации
Следующий патент: Способ селективной очистки алкил-трет-алкиловых эфиров ионной жидкостью
Случайный патент: Система для подвешивания потолочных плиток и способ сборки системы