Способ и устройство для определения деструктивного крутящего момента на оборудовании низа бурильной колонны
Формула / Реферат
1. Способ определения деструктивного крутящего момента на оборудовании низа бурильной колонны, в котором измеряют параметр, связанный с угловым ускорением, по меньшей мере в одной точке вдоль бурильной колонны; сравнивают угловое ускорение, определенное по измеренному параметру, с выбранным пороговым значением, которое связано с моментом инерции выбранных компонентов бурильной колонны и максимальным крутящим моментом, прикладываемым по меньшей мере к одному резьбовому соединению между выбранными компонентами, а также с моментом инерции трубных компонентов бурильной колонны; генерируют сигнал тревоги в случае превышения угловым ускорением выбранного порогового значения.
2. Способ по п.1, отличающийся тем, что генерирование сигнала тревоги включает реформатирование модуляции гидроимпульсной схемы телеметрии.
3. Способ по п.1, отличающийся тем, что выбранные компоненты включают по меньшей мере один из следующих компонентов: долото, гидравлический забойный двигатель, оборудование системы скважинных исследований в процессе бурения, бурильный замок, стабилизатор и воротник бура.
4. Способ по п.1, в котором изменяют по меньшей мере один рабочий параметр бурения в ответ на генерирование сигнала тревоги.
5. Способ по п.4, отличающийся тем, что по меньшей мере один рабочий параметр бурения включает по меньшей мере один из следующих параметров: нагрузка на долото, скорость вращения бурильной колонны и расход бурильного раствора.
6. Способ по п.5, отличающийся тем, что определяют периодичность крутящего момента, измеряют вариацию скорости вращения оборудования низа бурильной колонны и определяют угловое ускорение по колебаниям с амплитудой, соответствующей вариации скорости вращения, и периодичностью, соответствующей периодичности крутящего момента.
7. Способ по п.6, отличающийся тем, что определяют угловое ускорение по скорости вращения оборудования низа бурильной колонны.
8. Способ по п.7, отличающийся тем, что определение углового ускорения включает представление скорости вращения оборудования низа бурильной колонны в виде периодических колебаний, по которым определяют угловое ускорение.
9. Способ по п.1, отличающийся тем, что параметр включает угловое ускорение или крутящий момент, измеренный по меньшей мере в одном компоненте оборудования низа бурильной колонны, или скорость вращения оборудования низа бурильной колонны, или крутящий момент, приложенный к бурильной колонне на поверхности земли.
10. Способ по п.1, отличающийся тем, что измеряют параметр, связанный с продольным ускорением оборудования низа бурильной колонны; определяют продольные усилия по измеренному параметру; компонуют продольные усилия с крутящим моментом, определенным по параметру, связанному с продольным ускорением; и генерируют сигнал тревоги в случае превышения продольными усилиями, скомпонованными с крутящим моментом, порогового значения безопасной работы.
11. Устройство для определения деструктивного крутящего момента на оборудовании низа бурильной колонны, содержащее датчик для измерения углового ускорения по меньшей мере в одной точке вдоль бурильной колонны; средства для сравнения углового ускорения с выбранным пороговым значением, связанные с датчиком, причем пороговое значение зависит от момента инерции выбранных компонентов бурильной колонны и максимального крутящего момента, прикладываемого к резьбовым соединениям между выбранными компонентами; и средства для генерирования сигнала тревоги в случае превышения угловым ускорением выбранного порогового значения.
12. Устройство по п.11, отличающееся тем, что средства для генерирования сигнала тревоги содержат средства для форматирования модуляции гидроимпульсной схемы телеметрии.
13. Устройство по п.11, отличающееся тем, что выбранные компоненты включают по меньшей мере один из следующих компонентов: долото, бурильный замок, гидравлический забойный двигатель, оборудование системы скважинных исследований в процессе бурения, стабилизатор и воротник бура.
14. Способ определения избыточного крутящего момента в скважине, в котором измеряют параметр, связанный с крутящим моментом на компонентах бурильной колонны в скважине; определяют крутящий момент, развиваемый буровым долотом, связанным с нижним концом оборудования низа бурильной колонны; определяют крутящий момент, необходимый для вращения бурильной колонны, установленной над оборудованием низа бурильной колонны; определяют разность между моментом, определенным по измеренному параметру, требуемым для вращения бурильной колонны с поверхности земли, и суммой момента на буровом долоте и необходимого момента для бурильной колонны; и осуществляют индикацию избыточного момента в случае превышения указанной разностью выбранного порогового значения.

Текст
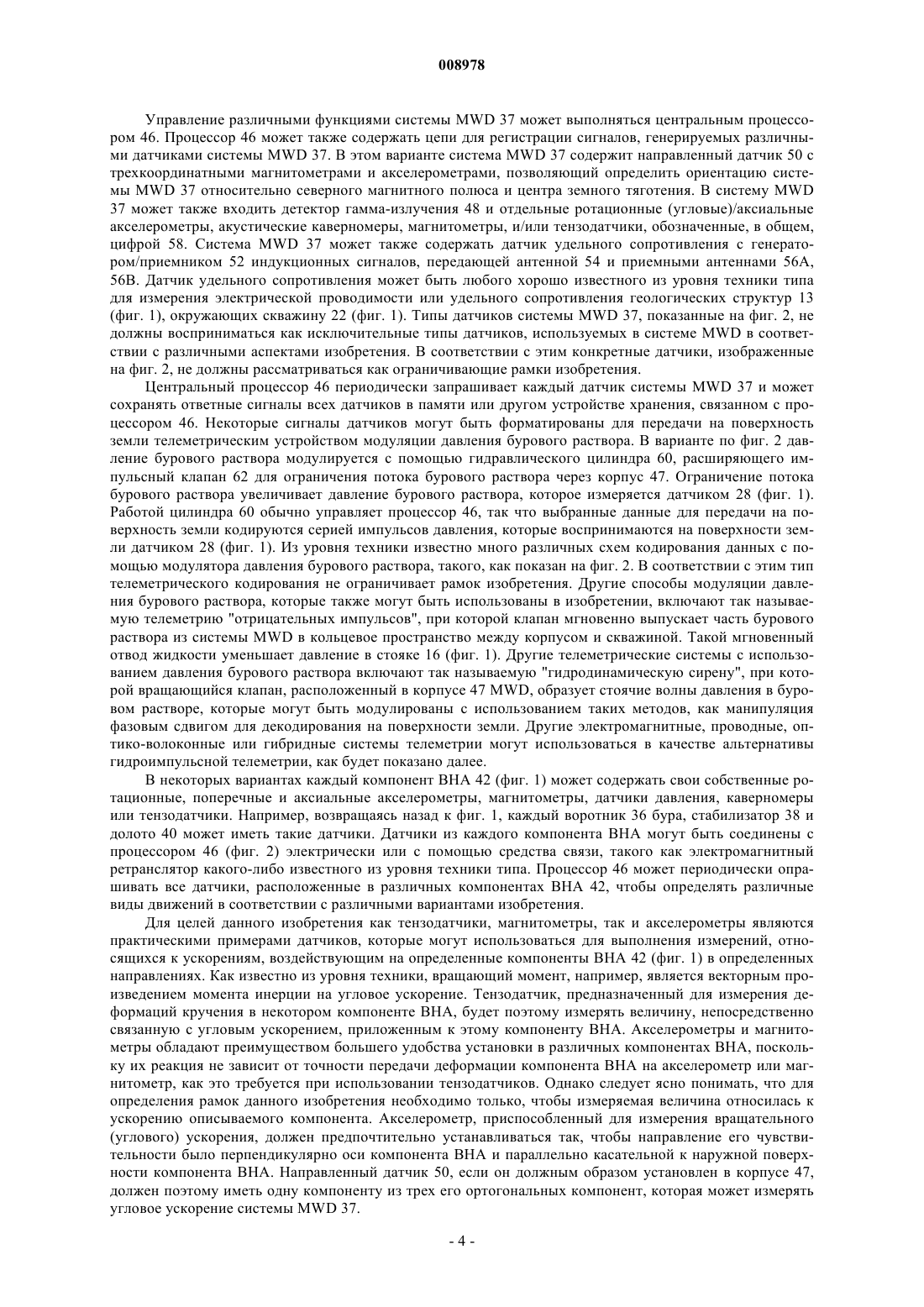
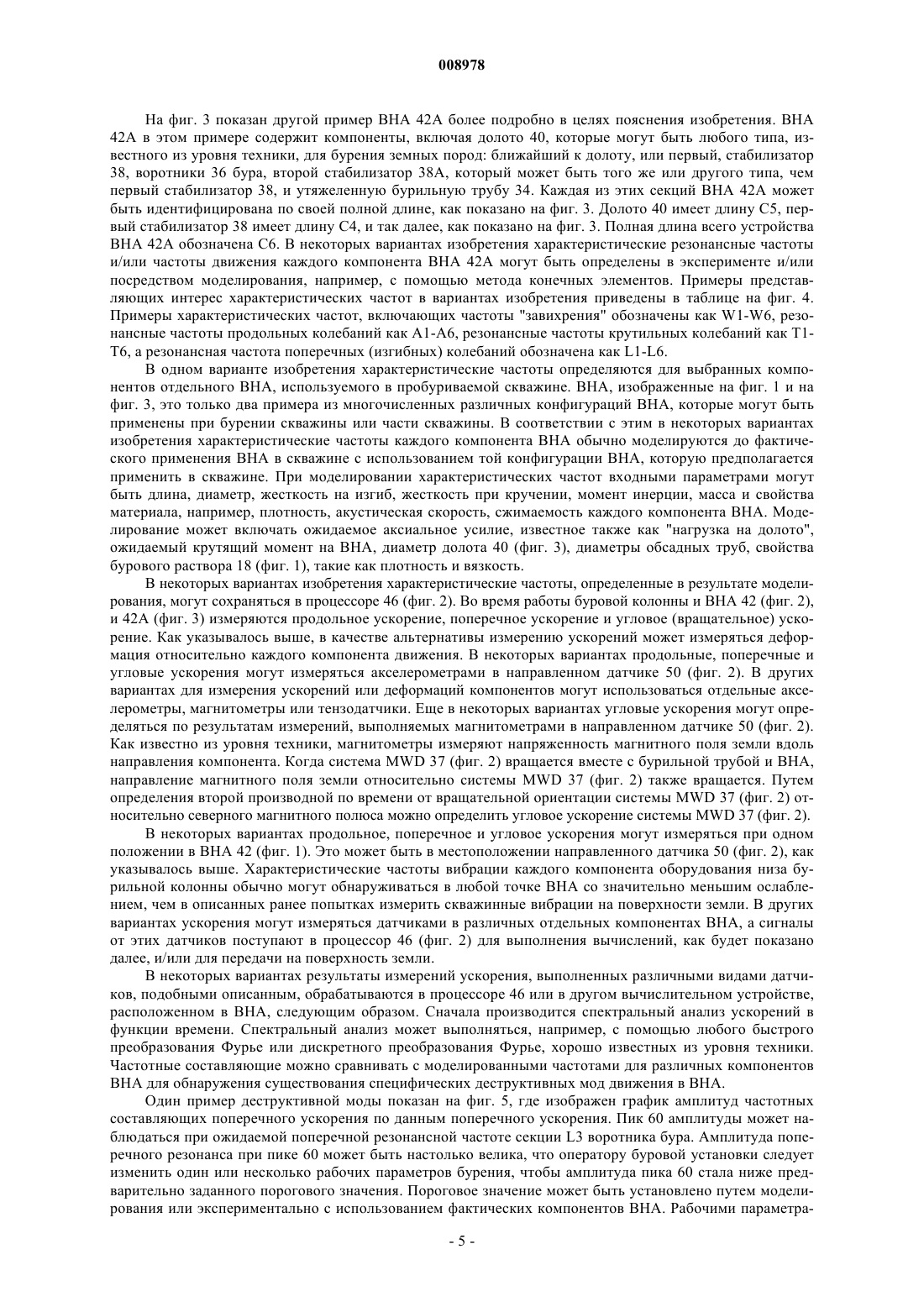
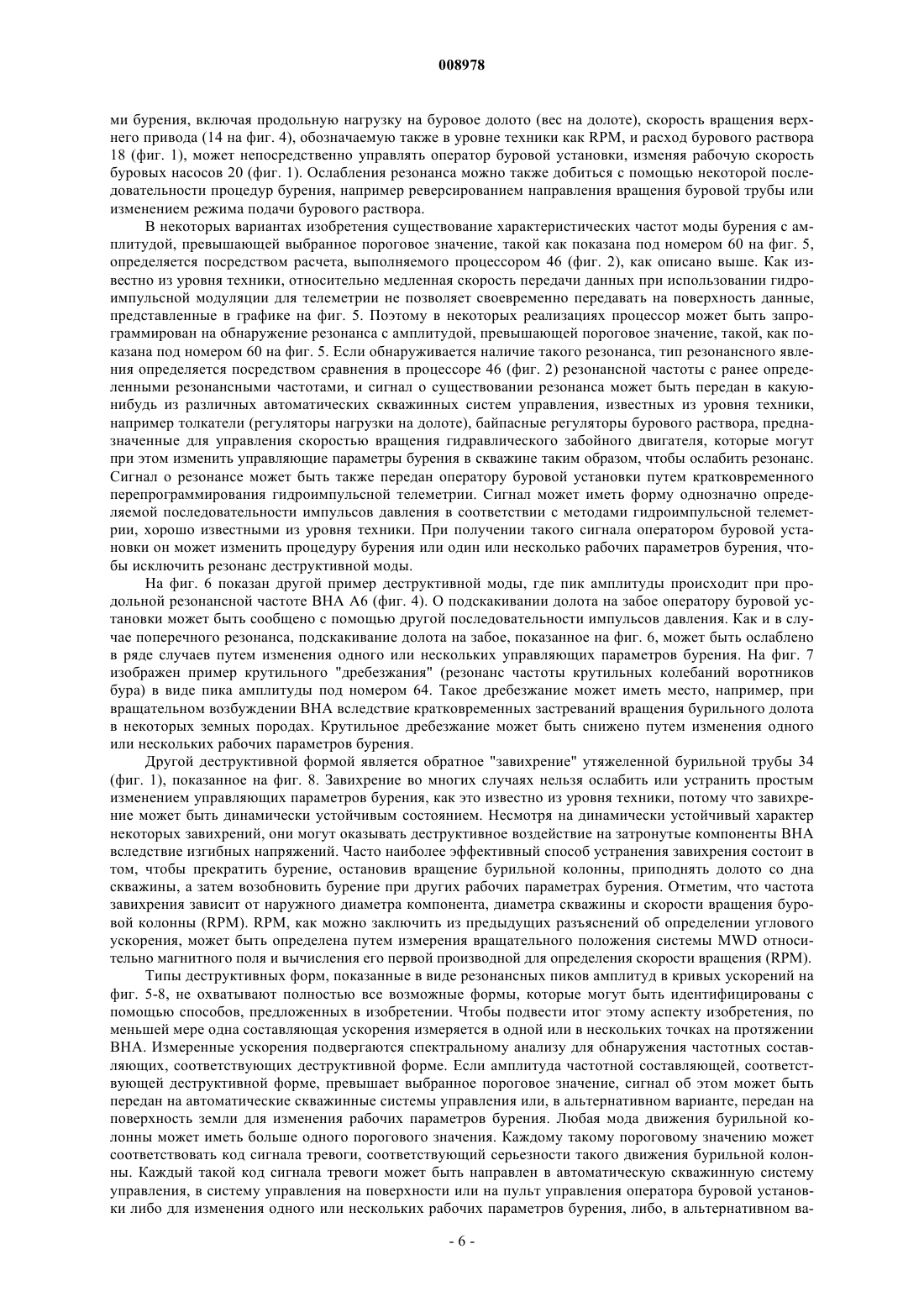
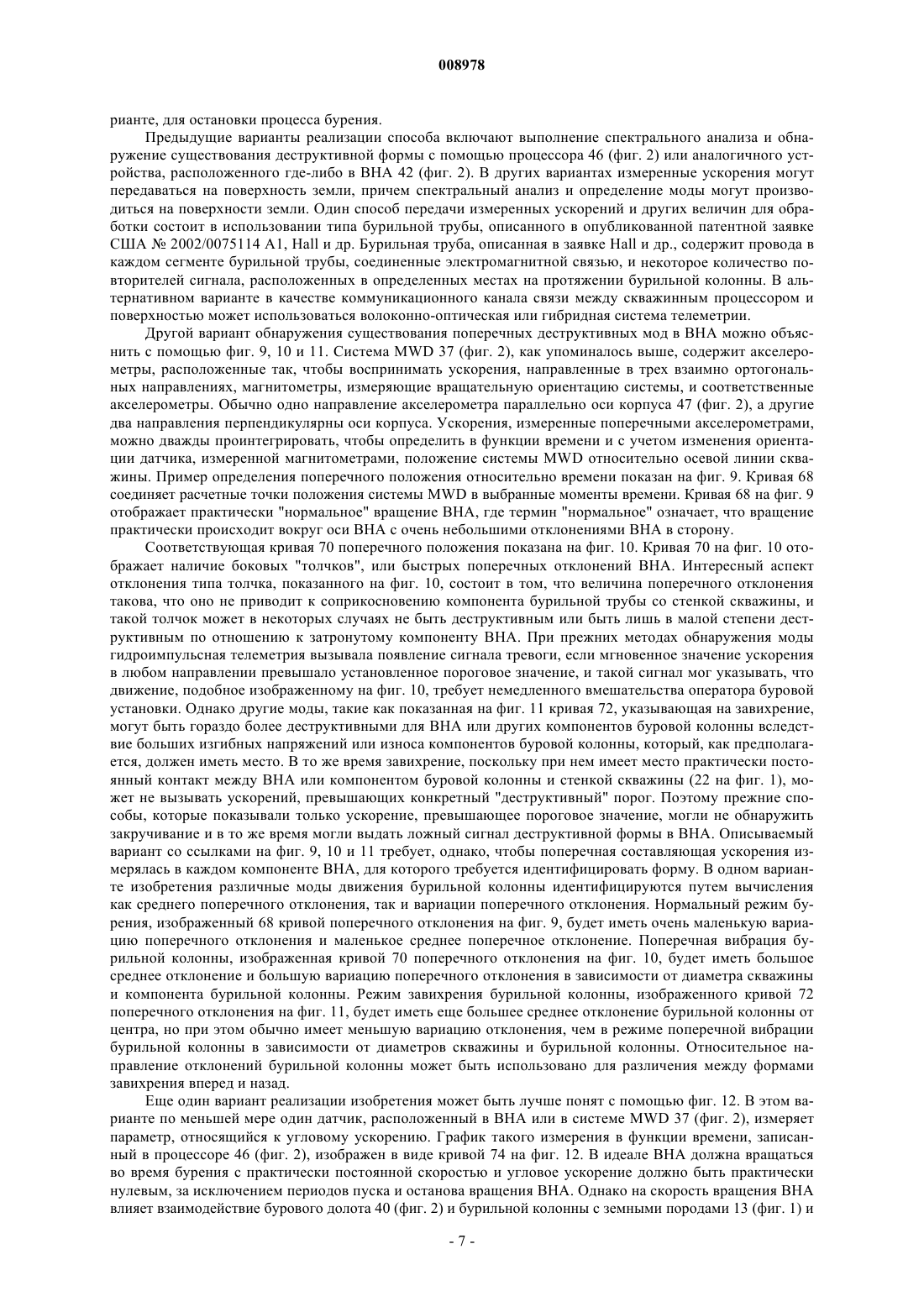
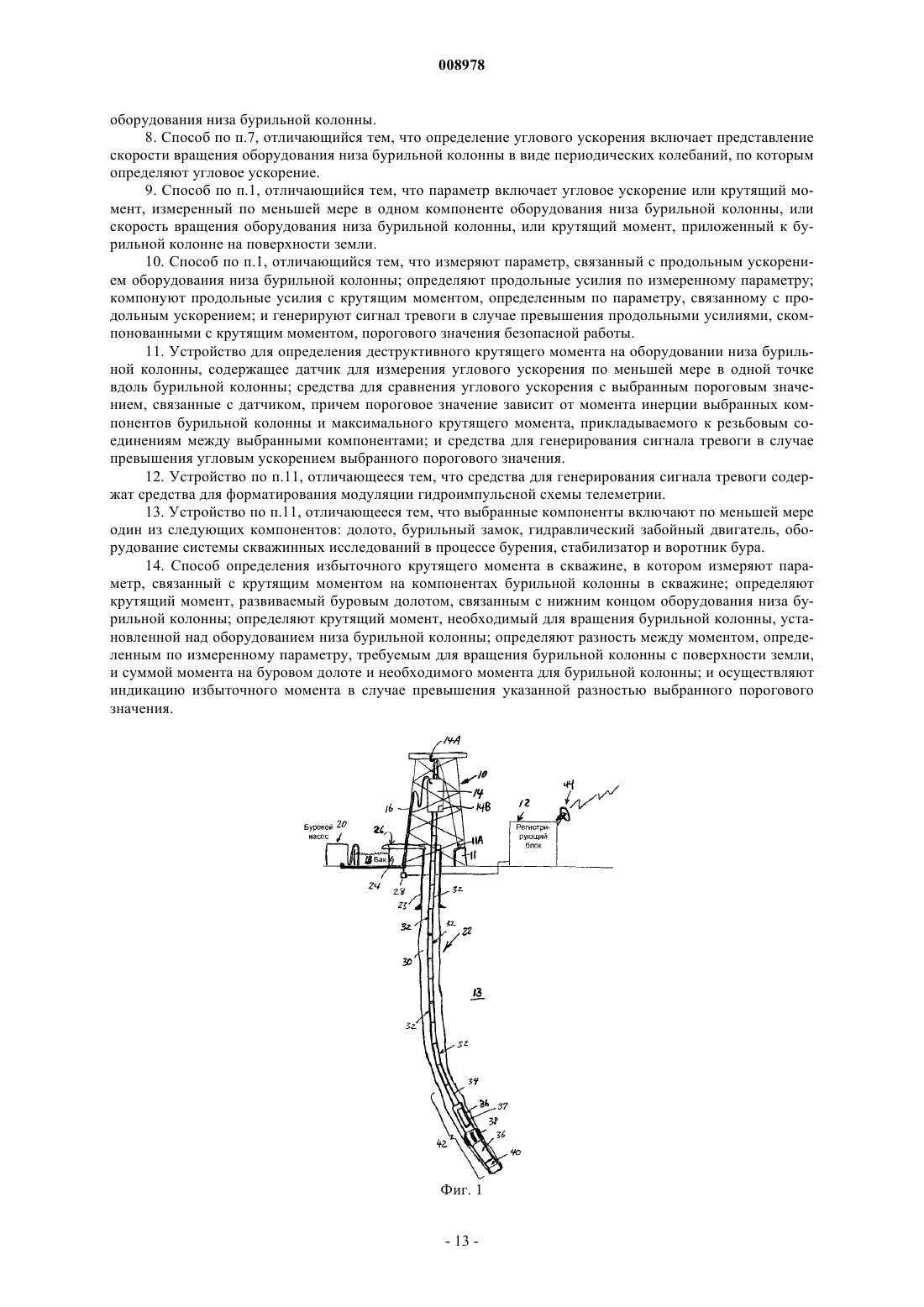
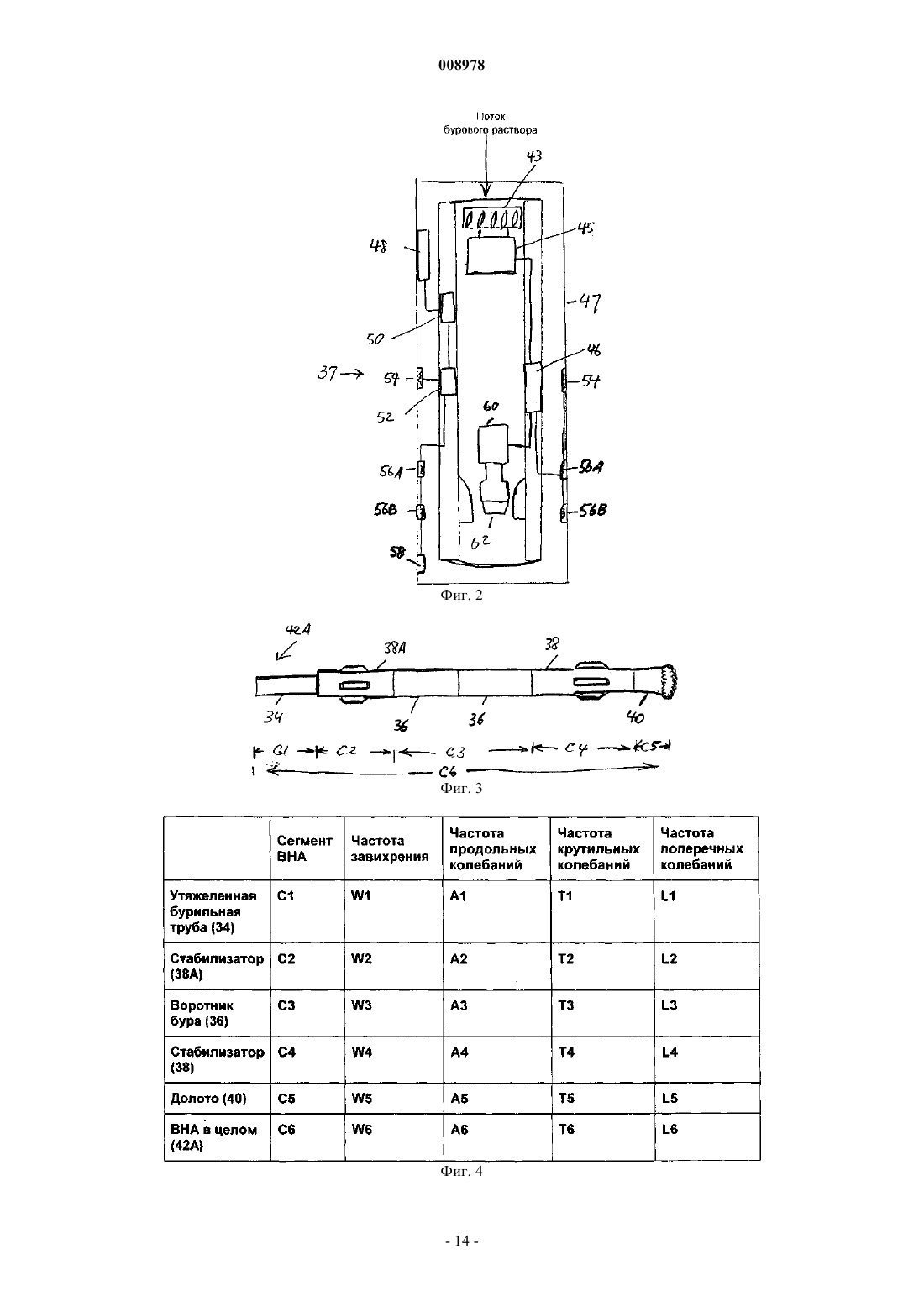
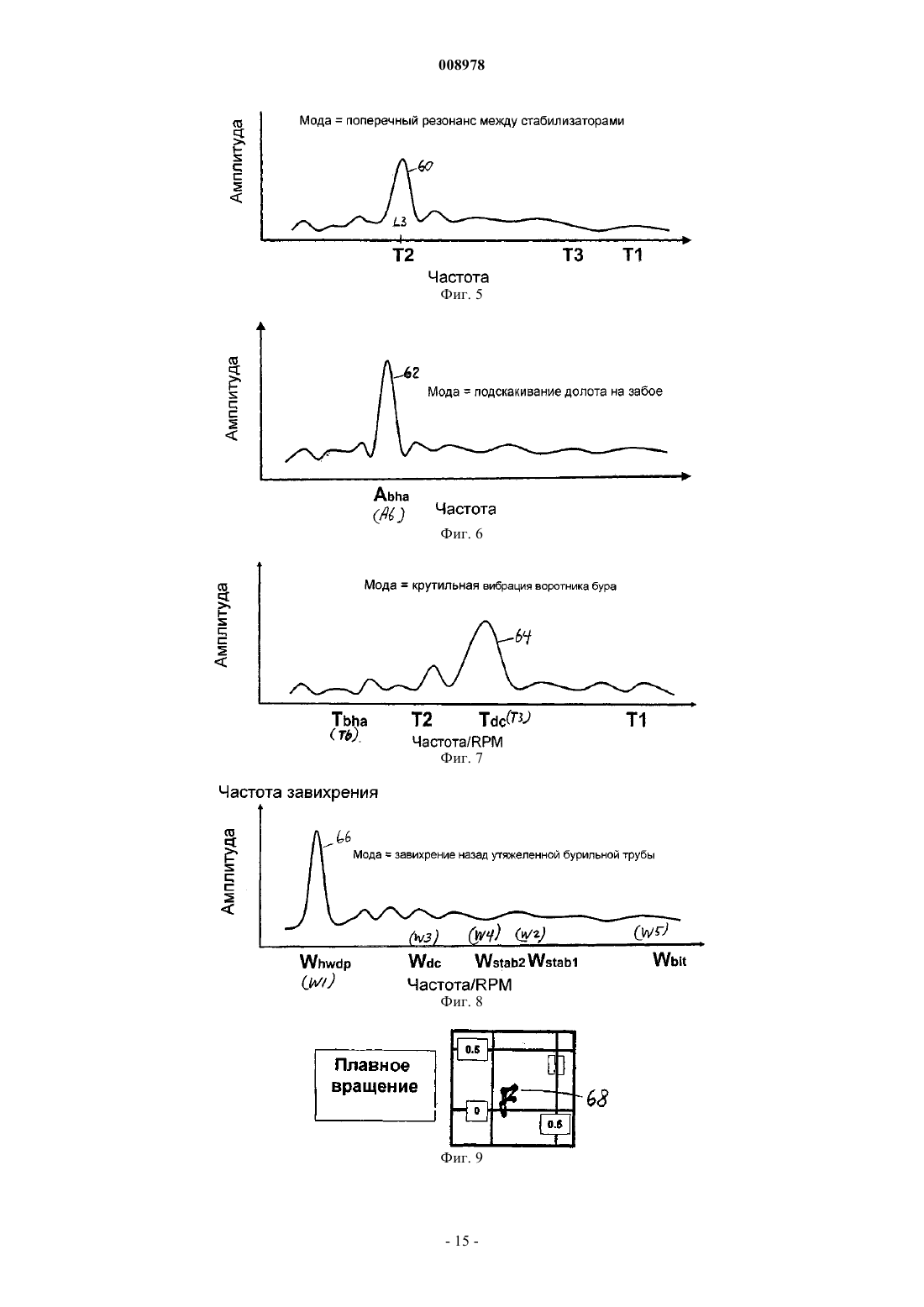
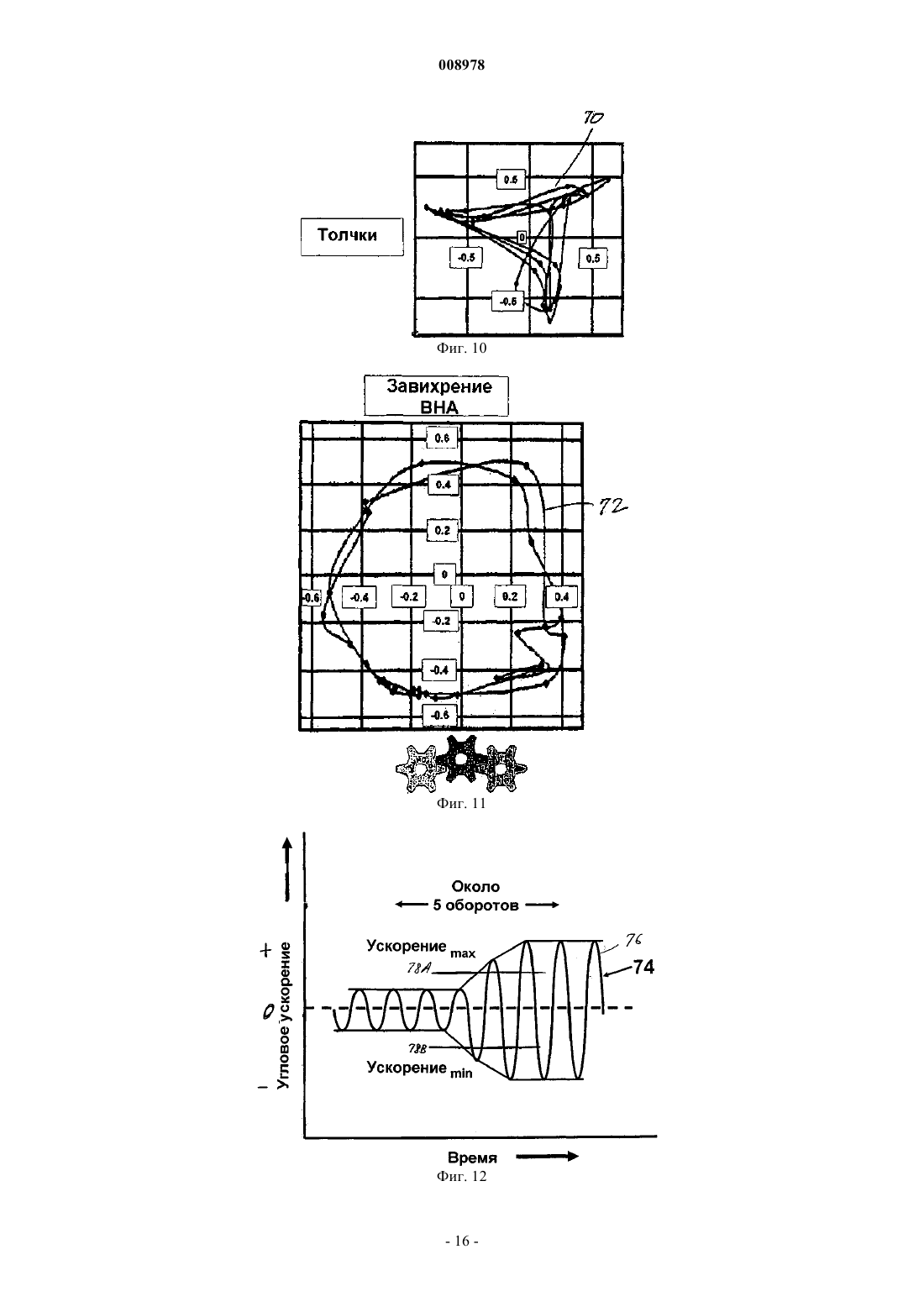
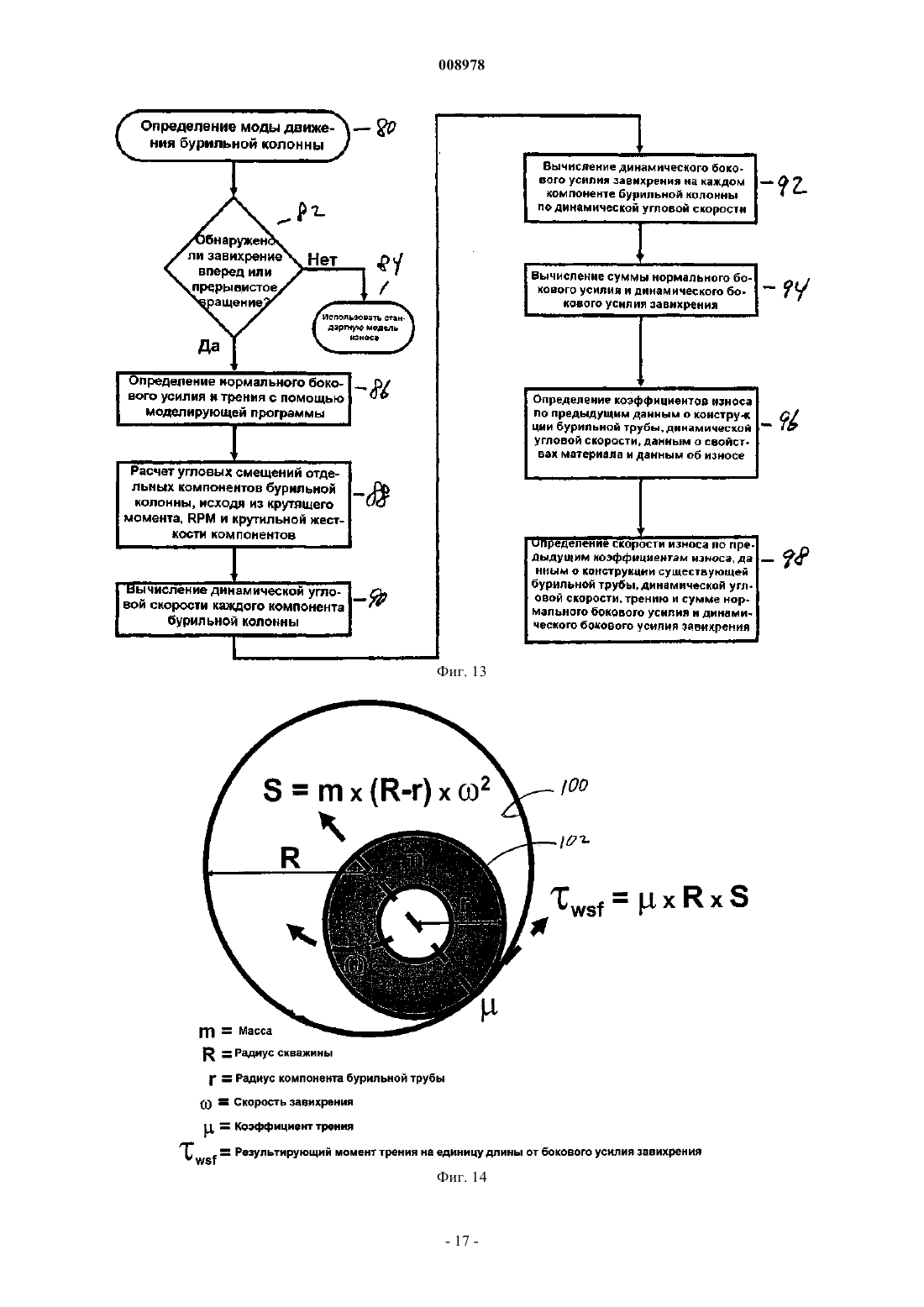
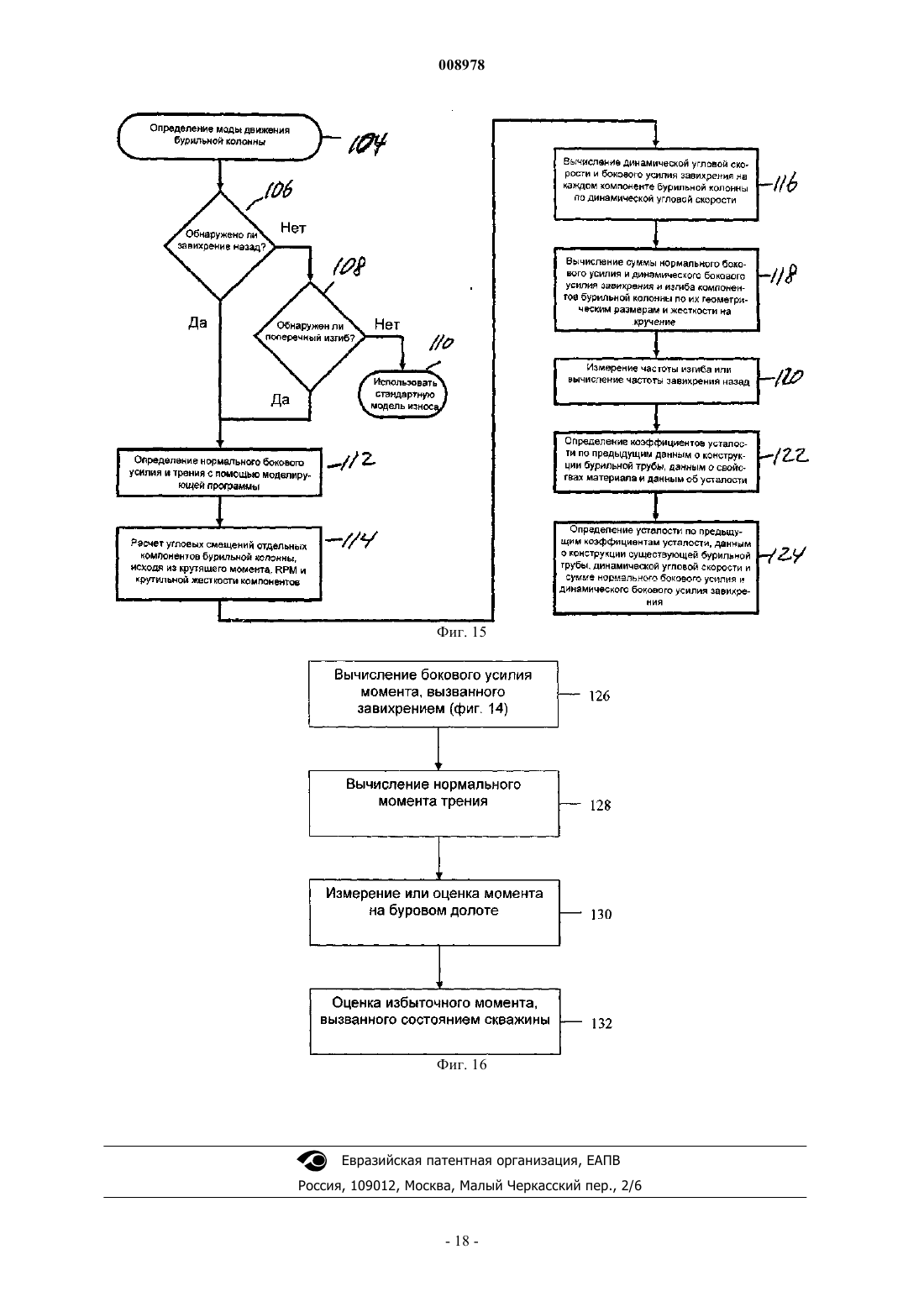
008978 Область техники, к которой относится изобретение Изобретение, в целом, относится к области бурения скважин в земле. Более конкретно, изобретение относится к устройствам и способам определения динамической моды движения бурильной колонны,предназначенной для вращения бурильного долота. Предшествующий уровень техники Бурение скважин в земле включает в себя роторное бурение, при котором к буровому станку или подобному подъемному приспособлению подвешена бурильная колонна, которая вращает буровое долото, расположенное на конце бурильной колонны. Оборудование на буровом станке и/или гидравлический двигатель, расположенный в бурильной колонне, вращают долото. В станке имеется подъемное устройство, к которому подвешена бурильная колонна так, чтобы к буровому долоту было приложено заданное аксиальное усилие (нагрузка на долото - "WOB"), когда долото вращается. Вследствие сочетания аксиального усилия с вращением долота долото выдалбливает, выскабливает и/или дробит скальную породу,пробуривая в ней скважину. Обычно буровой станок содержит жидкостные насосы для закачивания внутрь бурильной колонны жидкости, именуемой "буровым раствором". Буровой раствор, в конечном счете, выливается через сопла или промывочные каналы в буровом долоте. Буровой раствор поднимает буровой шлам из скважины и выносит его на поверхность земли для удаления. В других типах буровых установок в качестве текучей среды для подъема бурового шлама может использоваться сжатый воздух. Силы, действующие на обычную бурильную колонну во время бурения, очень велики. Вращающий момент, требующийся для вращения бурильной колонны, может достигать нескольких тысяч футофунтов. Аксиальные усилия могут доходить до нескольких десятков тысяч фунтов. Длина бурильной колонны может составлять 20 тыс. футов и более. Поскольку типичная буровая колонна состоит из резьбовых трубных сегментов диаметром порядка всего нескольких дюймов, сочетание длины бурильной колонны и величины продольных и крутильных сил, воздействующих на бурильную колонну, может вызвать весьма опасные виды движений бурильной колонны в скважине. Например, хорошо известна такая форма деструктивного движения буровой колонны, как "завихрение", при котором долото и/или бурильная колонна совершают прецессионные колебания вокруг оси, смещенной относительно центра скважины, либо в том же направлении, что и направление вращения бурильной колонны и бурового долота, либо в противоположном направлении. При другой деструктивной моде движения, "подскакивании долота на забое", вся бурильная колонна вибрирует в продольном направлении (вверх и вниз). "Поперечные" вибрации и "толчки момента" также могут приводить к износу бурильной колонны и снижать производительность бурения. Имеются и другие виды паразитных движений, такие как "взвинчивание" и крутильное освобождение низа бурильной колонны, когда долото или другие компоненты бурильной колонны мгновенно прекращают вращаться, а затем освобождаются. Некоторые или все эти деструктивные моды движения, если допускать их во время бурения, снижают производительность бурения и увеличивают опасность выхода из строя каких-либо компонентов бурильной колонны. Предыдущие примеры не являются исчерпывающим перечнем всех видов деструктивных движений, которым может подвергаться бурильная колонна, а предназначены только для того, чтобы объяснить природу данного изобретения. Из уровня техники известны способы измерения продольных и поперечных ускорений или связанных с ними параметров, а также параметров, связанных с продольными усилиями и вращающими моментами, около поверхности земли, чтобы попытаться обнаружить наличие деструктивных мод движения бурильной колонны. Ограниченность использования наземных измерений для обнаружения деструктивных мод движения бурильной колонны состоит в том, что бурильная колонна является несовершенным каналом связи для продольных, поперечных и/или крутильных ускорений,которые воздействуют на бурильную колонну у дна или вблизи дна скважины. В частности, сама бурильная колонна может амортизировать значительные кручения и изменения длины на своем большом протяжении. Более того, большая часть бурильной колонны может соприкасаться во время бурения со стенками скважины, так что трение между стенками скважины и бурильной колонной снижает некоторые ускорения, воздействующие на бурильную колонну около дна скважины. Из уровня техники известны также способы измерения ускорения, скорости вращения, давления,веса и/или вращающего момента, приложенных к различным компонентам бурильной колонны вблизи бурового долота. Устройства, выполняющие такие измерения, обычно являются частью так называемой"системы скважинных исследований в процессе бурения" (MWD), в которую могут входить дополнительные чувствительные устройства для измерения направления скважины относительно географических координат и датчики для измерения свойств земных пород, через которые проходит скважина. Ограниченность использования известной из уровня техники системы MWD для обнаружения деструктивных рабочих режимов бурильной колонны состоит в том, что скорость передачи данных в системах MWD,как правило, не превышает нескольких бит в секунду. Низкая скорость передачи данных вызвана типом применяемой телеметрии, а именно низкой частотой электромагнитных волн, или, наиболее часто, потока бурового раствора или модуляции давления. Низкая скорость передачи данных вынуждает передавать на поверхность земли посредством телеметрии, известной из уровня техники, как передача "в реальном времени", очень отобранную информацию, измеренную различными датчиками системы MWD. В то же время деструктивные режимы могут содержать ускорения с частотой до нескольких герц и выше. Изме-1 008978 рения ускорения, скорости вращения, давления, веса и/или вращающего момента, как правило, выполняются с относительно большой частотой, но только средние значения амплитуд, средние вариации амплитуд или пиковых значений передаются на поверхность земли без учета того, относится ли пик, среднее значение или средняя вариация к какому-либо определенному деструктивному режиму бурильной колонны. В результате системы MWD, известные из уровня техники, не обязательно наилучшим образом используют относящиеся к модам движения измерения, выполняемые датчиками системы MWD. Желательно иметь способ и устройство для идентификации мод движения бурильной колонны, которые могут передавать идентифицированный режим на поверхность земли для анализа, чтобы облегчить принятие соответствующих корректирующих мер для каждой отдельной моды движения и снизить риск поломки бурильной колонны. Раскрытие изобретения В первом аспекте изобретение относится к способу определения деструктивного крутящего момента на оборудовании низа бурильной колонны. Способ, соответствующий этому аспекту изобретения,включает измерение параметра, связанного с угловым ускорением, по меньшей мере в одной точке вдоль оборудования низа бурильной колонны и сравнение угловых ускорений с выбранным пороговым значением. Выбранное пороговое значение связано с моментом инерции выбранных компонентов оборудования низа бурильной колонны и максимально допустимым крутящим моментом, прикладываемым к резьбовым соединениям между выбранными компонентами, а также с моментом инерции трубных компонентов бурильной колонны. Способ предусматривает также генерирование сигнала тревоги, если угловое ускорение превышает выбранное пороговое значение. Во втором аспекте изобретение относится к устройству для определения деструктивного крутящего момента на оборудовании низа бурильной колонны. Устройство содержит датчик для измерения углового ускорения по меньшей мере в одной точке вдоль бурильной колонны и средства для сравнения углового ускорения с выбранным пороговым значением, связанные с датчиком. Пороговое значение зависит от момента инерции выбранных компонентов бурильной колонны и максимального крутящего момента,прикладываемого к резьбовым соединениям между выбранными компонентами. Устройство также содержит средства для генерирования сигнала тревоги в случае превышения угловым ускорением выбранного порогового значения. В третьем аспекте изобретение относится к способу определения избыточного крутящего момента в скважине. В способе, соответствующем этому аспекту изобретения, измеряют параметр, связанный с крутящим моментом на компонентах бурильной колонны в скважине; определяют крутящий момент,развиваемый буровым долотом, связанным с нижним концом оборудования низа бурильной колонны; определяют крутящий момент, необходимый для вращения бурильной колонны, установленной над оборудованием низа бурильной колонны; определяют разность между моментом, определенным по измеренному параметру, требуемым для вращения бурильной колонны с поверхности земли, и суммой момента на буровом долоте и необходимого момента для бурильной колонны; и осуществляют индикацию избыточного момента в случае превышения указанной разностью выбранного порогового значения. Другие аспекты и преимущества изобретения будут понятны из нижеследующего описания и формулы. Краткое описание чертежей На фиг. 1 показана типичная схема бурения скважины. На фиг. 2 показана часть типичной системы MWD. На фиг. 3 показан другой пример оборудования низа бурильной колонны (ВНА). На фиг. 4 показана таблица составляющих резонансных частот для каждого из компонентов, изображенных на фиг. 3. На фиг. 5 показан пример подвергнутых спектральному анализу измеренных ускорений, указывающий на наличие поперечного резонанса между стабилизаторами, изображенными в примере ВНА на фиг. 3. На фиг. 6 показан пример подвергнутых спектральному анализу измеренных ускорений, указывающий на наличие подскакивания долота на забое в примере ВНА на фиг. 3. На фиг. 7 показан пример подвергнутых спектральному анализу измеренных ускорений, указывающий на наличие крутильных вибраций воротников бура в примере ВНА на фиг. 3. На фиг. 8 показан пример подвергнутых спектральному анализу измеренных ускорений, указывающий на наличие обратного завихрения утяжеленной бурильной трубы в примере ВНА на фиг. 3. На фиг. 9 показан пример дважды проинтегрированных измеренных ускорений, указывающий на нормальное вращение бурильной колонны. На фиг. 10 показан пример дважды проинтегрированных измеренных ускорений, указывающий на поперечный толчок или изгиб. На фиг. 11 показан пример дважды проинтегрированных измеренных ускорений, указывающий на завихрение. На фиг. 12 показан график мгновенных значений углового ускорения ВНА в функции времени с указанием максимального и минимального углового ускорения. На фиг. 13 показана блок-схема одного варианта способа определения скорости изнашивания ком-2 008978 понентов бурильной колонны по моде движения бурильной колонны. На фиг. 14 показано центростремительное поперечное усилие и сила трения кручения при переднем завихрении бурильной колонны. На фиг. 15 показана блок-схема одного варианта способа определения степени усталости компонентов бурильной колонны по моде движения бурильной колонны. На фиг. 16 показана блок-схема примерной реализации способа сравнения крутящего момента, измеренного на поверхности, с ожидаемым моментом на поверхности для определения опасного состояния в скважине. Сведения, подтверждающие возможность осуществления изобретения На фиг. 1 показана типичная система бурения скважины, которая может применяться с различными вариантами способа и устройства в соответствии с изобретением. В буровом станке 10 имеется буровая лебедка 11 или аналогичное подъемное устройство, известное из уровня техники, для поднятия, удержания и опускания бурильной колонны. Бурильная колонна содержит ряд свинченных секций бурильной трубы, обозначенной, в целом, под номером 32. Самая нижняя часть бурильной колонны носит название оборудования низа бурильной колонны (ВНА) 42, содержащего в варианте, изображенном на фиг. 1, буровое долото 40, предназначенное для прохождения сквозь земные породы 13 под поверхностью земли. ВНА 42 может также содержать различные устройства, такие как утяжеленная бурильная труба 34 и воротники 36 бура. ВНА 42 может также содержать один или несколько стабилизаторов 38 с установленными на них лопастями для удержания ВНА 42 приблизительно в центре скважины 22 во время бурения. В различных вариантах один или несколько воротников 36 бура могут содержать датчики для скважинных исследований во время бурения (MWD) и блок телеметрии по гидроимпульсному каналу связи, вс вместе это называется "системой MWD" и обозначено цифрой 37. Назначение системы MWD 37 и входящих в нее типов датчиков будет объяснено далее со ссылками на фиг. 2. Буровая лебедка 11 управляется во время активного бурения так, чтобы к буровому долоту 40 было приложено выбранное аксиальное усилие. Это аксиальное усилие, как известно из уровня техники, образуется за счет массы бурильной колонны, значительная часть которой подвешена на буровой лебедке 11. Вес неподвешенной массы бурильной колонны передается на долото 40 в виде аксиального усилия. Долото 40 вращается при вращении трубы 32 с использованием вкладыша бурового ротора/ведущей бурильной трубы (не показан на фиг. 1) или предпочтительно верхнего привода 14 или силового вертлюга любого типа, хорошо известного из уровня техники. Когда труба 32 вращается, а значит, вращается ВНА 42 и долото 40, насос 20 откачивает буровой раствор ("шлам") 18 из котлована или бака 24 и поднимает его по стояку или шлангам к верхнему приводу 14, так что буровой раствор 18 прокачивается через сегменты трубы 32, а затем через ВНА 42. В конце концов, буровой раствор 18 выпускается через сопла или промывочные каналы (не показаны) в долоте 40, где он поднимает выбуренную горную породу (не показана) на поверхность земли через кольцевое пространство между стенками скважины и наружной стенкой трубы 32 и ВНА 42. Затем буровой раствор 18 поднимается через кондуктор 23 к устью скважины и/или обратной линии 26. После удаления выбуренной горной породы с использованием фильтрующих устройств (не показаны на фиг. 1) буровой раствор возвращается в бак 24. Стояковая система 16 в данном варианте включает датчик давления 28, генерирующий электрические или другие сигналы давления бурового раствора в стояке 16. Датчик давления 28 оперативно подключен к устройствам (не показаны отдельно на фиг. 1) в регистрирующем блоке 12 для дешифровки,регистрации и интерпретации сигналов, поступающих от системы MWD 37. Как известно из уровня техники, система MWD 37 содержит устройство, которое будет описано ниже со ссылками на фиг. 2, для модуляции давления бурового раствора 18 и передачи избранных данных на поверхность земли. В некоторых вариантах регистрирующий блок 12 содержит телекоммуникационное устройство 44, такое как спутниковый приемопередатчик или приемопередатчик радиосвязи, для передачи данных, получаемых от системы MWD 37 и других датчиков на поверхности земли в удаленный пункт. Такие телекоммуникационные устройства хорошо известны из уровня техники. Элементы измерения и регистрации данных,показанные на фиг. 1, включая датчик давления 28 и регистрирующий блок 12, являются только примерами систем получения и регистрации данных, которые могут быть использованы в изобретении, и, соответственно, не должны восприниматься как ограничивающие рамки изобретения. В верхнем приводе 14 также могут быть установлены датчики, обозначенные совместно цифрой 14 В, для измерения скорости вращения бурильной колонны, величины аксиальной нагрузки, подвешенной к верхнему приводу 14,и крутящего момента, приложенного к бурильной колонне. Сигналы от этих датчиков 14 В могут передаваться в регистрирующий блок 12 для последующей обработки, как будет описано далее. Один вариант системы MWD, показанной в общем виде под номером 37 на фиг. 1, показан более подробно на фиг. 2. Система MWD 37 обычно располагается внутри немагнитного корпуса 47, изготовленного из монель-металла или подобного материала и соединяющегося концами с бурильной колонной. Механические свойства корпуса 47 обычно такие же, как и у других воротников 36 бура (фиг. 1). В корпусе 47 расположена турбина 43, в которой поток бурового раствора 18 (фиг. 1) частично преобразуется во вращательную энергию для привода генератора 45 переменного или постоянного тока для питания различных электрических цепей и датчиков системы MWD 37. В системах MWD других типов в качестве источников электроэнергии могут использоваться батареи.-3 008978 Управление различными функциями системы MWD 37 может выполняться центральным процессором 46. Процессор 46 может также содержать цепи для регистрации сигналов, генерируемых различными датчиками системы MWD 37. В этом варианте система MWD 37 содержит направленный датчик 50 с трехкоординатными магнитометрами и акселерометрами, позволяющий определить ориентацию системы MWD 37 относительно северного магнитного полюса и центра земного тяготения. В систему MWD 37 может также входить детектор гамма-излучения 48 и отдельные ротационные (угловые)/аксиальные акселерометры, акустические каверномеры, магнитометры, и/или тензодатчики, обозначенные, в общем,цифрой 58. Система MWD 37 может также содержать датчик удельного сопротивления с генератором/приемником 52 индукционных сигналов, передающей антенной 54 и приемными антеннами 56 А,56 В. Датчик удельного сопротивления может быть любого хорошо известного из уровня техники типа для измерения электрической проводимости или удельного сопротивления геологических структур 13(фиг. 1), окружающих скважину 22 (фиг. 1). Типы датчиков системы MWD 37, показанные на фиг. 2, не должны восприниматься как исключительные типы датчиков, используемых в системе MWD в соответствии с различными аспектами изобретения. В соответствии с этим конкретные датчики, изображенные на фиг. 2, не должны рассматриваться как ограничивающие рамки изобретения. Центральный процессор 46 периодически запрашивает каждый датчик системы MWD 37 и может сохранять ответные сигналы всех датчиков в памяти или другом устройстве хранения, связанном с процессором 46. Некоторые сигналы датчиков могут быть форматированы для передачи на поверхность земли телеметрическим устройством модуляции давления бурового раствора. В варианте по фиг. 2 давление бурового раствора модулируется с помощью гидравлического цилиндра 60, расширяющего импульсный клапан 62 для ограничения потока бурового раствора через корпус 47. Ограничение потока бурового раствора увеличивает давление бурового раствора, которое измеряется датчиком 28 (фиг. 1). Работой цилиндра 60 обычно управляет процессор 46, так что выбранные данные для передачи на поверхность земли кодируются серией импульсов давления, которые воспринимаются на поверхности земли датчиком 28 (фиг. 1). Из уровня техники известно много различных схем кодирования данных с помощью модулятора давления бурового раствора, такого, как показан на фиг. 2. В соответствии с этим тип телеметрического кодирования не ограничивает рамок изобретения. Другие способы модуляции давления бурового раствора, которые также могут быть использованы в изобретении, включают так называемую телеметрию "отрицательных импульсов", при которой клапан мгновенно выпускает часть бурового раствора из системы MWD в кольцевое пространство между корпусом и скважиной. Такой мгновенный отвод жидкости уменьшает давление в стояке 16 (фиг. 1). Другие телеметрические системы с использованием давления бурового раствора включают так называемую "гидродинамическую сирену", при которой вращающийся клапан, расположенный в корпусе 47 MWD, образует стоячие волны давления в буровом растворе, которые могут быть модулированы с использованием таких методов, как манипуляция фазовым сдвигом для декодирования на поверхности земли. Другие электромагнитные, проводные, оптико-волоконные или гибридные системы телеметрии могут использоваться в качестве альтернативы гидроимпульсной телеметрии, как будет показано далее. В некоторых вариантах каждый компонент ВНА 42 (фиг. 1) может содержать свои собственные ротационные, поперечные и аксиальные акселерометры, магнитометры, датчики давления, каверномеры или тензодатчики. Например, возвращаясь назад к фиг. 1, каждый воротник 36 бура, стабилизатор 38 и долото 40 может иметь такие датчики. Датчики из каждого компонента ВНА могут быть соединены с процессором 46 (фиг. 2) электрически или с помощью средства связи, такого как электромагнитный ретранслятор какого-либо известного из уровня техники типа. Процессор 46 может периодически опрашивать все датчики, расположенные в различных компонентах ВНА 42, чтобы определять различные виды движений в соответствии с различными вариантами изобретения. Для целей данного изобретения как тензодатчики, магнитометры, так и акселерометры являются практическими примерами датчиков, которые могут использоваться для выполнения измерений, относящихся к ускорениям, воздействующим на определенные компоненты ВНА 42 (фиг. 1) в определенных направлениях. Как известно из уровня техники, вращающий момент, например, является векторным произведением момента инерции на угловое ускорение. Тензодатчик, предназначенный для измерения деформаций кручения в некотором компоненте ВНА, будет поэтому измерять величину, непосредственно связанную с угловым ускорением, приложенным к этому компоненту ВНА. Акселерометры и магнитометры обладают преимуществом большего удобства установки в различных компонентах ВНА, поскольку их реакция не зависит от точности передачи деформации компонента ВНА на акселерометр или магнитометр, как это требуется при использовании тензодатчиков. Однако следует ясно понимать, что для определения рамок данного изобретения необходимо только, чтобы измеряемая величина относилась к ускорению описываемого компонента. Акселерометр, приспособленный для измерения вращательного(углового) ускорения, должен предпочтительно устанавливаться так, чтобы направление его чувствительности было перпендикулярно оси компонента ВНА и параллельно касательной к наружной поверхности компонента ВНА. Направленный датчик 50, если он должным образом установлен в корпусе 47,должен поэтому иметь одну компоненту из трех его ортогональных компонент, которая может измерять угловое ускорение системы MWD 37.-4 008978 На фиг. 3 показан другой пример ВНА 42 А более подробно в целях пояснения изобретения. ВНА 42 А в этом примере содержит компоненты, включая долото 40, которые могут быть любого типа, известного из уровня техники, для бурения земных пород: ближайший к долоту, или первый, стабилизатор 38, воротники 36 бура, второй стабилизатор 38 А, который может быть того же или другого типа, чем первый стабилизатор 38, и утяжеленную бурильную трубу 34. Каждая из этих секций ВНА 42 А может быть идентифицирована по своей полной длине, как показано на фиг. 3. Долото 40 имеет длину С 5, первый стабилизатор 38 имеет длину С 4, и так далее, как показано на фиг. 3. Полная длина всего устройства ВНА 42 А обозначена С 6. В некоторых вариантах изобретения характеристические резонансные частоты и/или частоты движения каждого компонента ВНА 42 А могут быть определены в эксперименте и/или посредством моделирования, например, с помощью метода конечных элементов. Примеры представляющих интерес характеристических частот в вариантах изобретения приведены в таблице на фиг. 4. Примеры характеристических частот, включающих частоты "завихрения" обозначены как W1-W6, резонансные частоты продольных колебаний как А 1-А 6, резонансные частоты крутильных колебаний как Т 1 Т 6, а резонансная частота поперечных (изгибных) колебаний обозначена как L1-L6. В одном варианте изобретения характеристические частоты определяются для выбранных компонентов отдельного ВНА, используемого в пробуриваемой скважине. ВНА, изображенные на фиг. 1 и на фиг. 3, это только два примера из многочисленных различных конфигураций ВНА, которые могут быть применены при бурении скважины или части скважины. В соответствии с этим в некоторых вариантах изобретения характеристические частоты каждого компонента ВНА обычно моделируются до фактического применения ВНА в скважине с использованием той конфигурации ВНА, которую предполагается применить в скважине. При моделировании характеристических частот входными параметрами могут быть длина, диаметр, жесткость на изгиб, жесткость при кручении, момент инерции, масса и свойства материала, например, плотность, акустическая скорость, сжимаемость каждого компонента ВНА. Моделирование может включать ожидаемое аксиальное усилие, известное также как "нагрузка на долото",ожидаемый крутящий момент на ВНА, диаметр долота 40 (фиг. 3), диаметры обсадных труб, свойства бурового раствора 18 (фиг. 1), такие как плотность и вязкость. В некоторых вариантах изобретения характеристические частоты, определенные в результате моделирования, могут сохраняться в процессоре 46 (фиг. 2). Во время работы буровой колонны и ВНА 42 (фиг. 2),и 42 А (фиг. 3) измеряются продольное ускорение, поперечное ускорение и угловое (вращательное) ускорение. Как указывалось выше, в качестве альтернативы измерению ускорений может измеряться деформация относительно каждого компонента движения. В некоторых вариантах продольные, поперечные и угловые ускорения могут измеряться акселерометрами в направленном датчике 50 (фиг. 2). В других вариантах для измерения ускорений или деформаций компонентов могут использоваться отдельные акселерометры, магнитометры или тензодатчики. Еще в некоторых вариантах угловые ускорения могут определяться по результатам измерений, выполняемых магнитометрами в направленном датчике 50 (фиг. 2). Как известно из уровня техники, магнитометры измеряют напряженность магнитного поля земли вдоль направления компонента. Когда система MWD 37 (фиг. 2) вращается вместе с бурильной трубой и ВНА,направление магнитного поля земли относительно системы MWD 37 (фиг. 2) также вращается. Путем определения второй производной по времени от вращательной ориентации системы MWD 37 (фиг. 2) относительно северного магнитного полюса можно определить угловое ускорение системы MWD 37 (фиг. 2). В некоторых вариантах продольное, поперечное и угловое ускорения могут измеряться при одном положении в ВНА 42 (фиг. 1). Это может быть в местоположении направленного датчика 50 (фиг. 2), как указывалось выше. Характеристические частоты вибрации каждого компонента оборудования низа бурильной колонны обычно могут обнаруживаться в любой точке ВНА со значительно меньшим ослаблением, чем в описанных ранее попытках измерить скважинные вибрации на поверхности земли. В других вариантах ускорения могут измеряться датчиками в различных отдельных компонентах ВНА, а сигналы от этих датчиков поступают в процессор 46 (фиг. 2) для выполнения вычислений, как будет показано далее, и/или для передачи на поверхность земли. В некоторых вариантах результаты измерений ускорения, выполненных различными видами датчиков, подобными описанным, обрабатываются в процессоре 46 или в другом вычислительном устройстве,расположенном в ВНА, следующим образом. Сначала производится спектральный анализ ускорений в функции времени. Спектральный анализ может выполняться, например, с помощью любого быстрого преобразования Фурье или дискретного преобразования Фурье, хорошо известных из уровня техники. Частотные составляющие можно сравнивать с моделированными частотами для различных компонентов ВНА для обнаружения существования специфических деструктивных мод движения в ВНА. Один пример деструктивной моды показан на фиг. 5, где изображен график амплитуд частотных составляющих поперечного ускорения по данным поперечного ускорения. Пик 60 амплитуды может наблюдаться при ожидаемой поперечной резонансной частоте секции L3 воротника бура. Амплитуда поперечного резонанса при пике 60 может быть настолько велика, что оператору буровой установки следует изменить один или несколько рабочих параметров бурения, чтобы амплитуда пика 60 стала ниже предварительно заданного порогового значения. Пороговое значение может быть установлено путем моделирования или экспериментально с использованием фактических компонентов ВНА. Рабочими параметра-5 008978 ми бурения, включая продольную нагрузку на буровое долото (вес на долоте), скорость вращения верхнего привода (14 на фиг. 4), обозначаемую также в уровне техники как RPM, и расход бурового раствора 18 (фиг. 1), может непосредственно управлять оператор буровой установки, изменяя рабочую скорость буровых насосов 20 (фиг. 1). Ослабления резонанса можно также добиться с помощью некоторой последовательности процедур бурения, например реверсированием направления вращения буровой трубы или изменением режима подачи бурового раствора. В некоторых вариантах изобретения существование характеристических частот моды бурения с амплитудой, превышающей выбранное пороговое значение, такой как показана под номером 60 на фиг. 5,определяется посредством расчета, выполняемого процессором 46 (фиг. 2), как описано выше. Как известно из уровня техники, относительно медленная скорость передачи данных при использовании гидроимпульсной модуляции для телеметрии не позволяет своевременно передавать на поверхность данные,представленные в графике на фиг. 5. Поэтому в некоторых реализациях процессор может быть запрограммирован на обнаружение резонанса с амплитудой, превышающей пороговое значение, такой, как показана под номером 60 на фиг. 5. Если обнаруживается наличие такого резонанса, тип резонансного явления определяется посредством сравнения в процессоре 46 (фиг. 2) резонансной частоты с ранее определенными резонансными частотами, и сигнал о существовании резонанса может быть передан в какуюнибудь из различных автоматических скважинных систем управления, известных из уровня техники,например толкатели (регуляторы нагрузки на долоте), байпасные регуляторы бурового раствора, предназначенные для управления скоростью вращения гидравлического забойного двигателя, которые могут при этом изменить управляющие параметры бурения в скважине таким образом, чтобы ослабить резонанс. Сигнал о резонансе может быть также передан оператору буровой установки путем кратковременного перепрограммирования гидроимпульсной телеметрии. Сигнал может иметь форму однозначно определяемой последовательности импульсов давления в соответствии с методами гидроимпульсной телеметрии, хорошо известными из уровня техники. При получении такого сигнала оператором буровой установки он может изменить процедуру бурения или один или несколько рабочих параметров бурения, чтобы исключить резонанс деструктивной моды. На фиг. 6 показан другой пример деструктивной моды, где пик амплитуды происходит при продольной резонансной частоте ВНА А 6 (фиг. 4). О подскакивании долота на забое оператору буровой установки может быть сообщено с помощью другой последовательности импульсов давления. Как и в случае поперечного резонанса, подскакивание долота на забое, показанное на фиг. 6, может быть ослаблено в ряде случаев путем изменения одного или нескольких управляющих параметров бурения. На фиг. 7 изображен пример крутильного "дребезжания" (резонанс частоты крутильных колебаний воротников бура) в виде пика амплитуды под номером 64. Такое дребезжание может иметь место, например, при вращательном возбуждении ВНА вследствие кратковременных застреваний вращения бурильного долота в некоторых земных породах. Крутильное дребезжание может быть снижено путем изменения одного или нескольких рабочих параметров бурения. Другой деструктивной формой является обратное "завихрение" утяжеленной бурильной трубы 34(фиг. 1), показанное на фиг. 8. Завихрение во многих случаях нельзя ослабить или устранить простым изменением управляющих параметров бурения, как это известно из уровня техники, потому что завихрение может быть динамически устойчивым состоянием. Несмотря на динамически устойчивый характер некоторых завихрений, они могут оказывать деструктивное воздействие на затронутые компоненты ВНА вследствие изгибных напряжений. Часто наиболее эффективный способ устранения завихрения состоит в том, чтобы прекратить бурение, остановив вращение бурильной колонны, приподнять долото со дна скважины, а затем возобновить бурение при других рабочих параметрах бурения. Отметим, что частота завихрения зависит от наружного диаметра компонента, диаметра скважины и скорости вращения буровой колонны (RPM). RPM, как можно заключить из предыдущих разъяснений об определении углового ускорения, может быть определена путем измерения вращательного положения системы MWD относительно магнитного поля и вычисления его первой производной для определения скорости вращения (RPM). Типы деструктивных форм, показанные в виде резонансных пиков амплитуд в кривых ускорений на фиг. 5-8, не охватывают полностью все возможные формы, которые могут быть идентифицированы с помощью способов, предложенных в изобретении. Чтобы подвести итог этому аспекту изобретения, по меньшей мере одна составляющая ускорения измеряется в одной или в нескольких точках на протяжении ВНА. Измеренные ускорения подвергаются спектральному анализу для обнаружения частотных составляющих, соответствующих деструктивной форме. Если амплитуда частотной составляющей, соответствующей деструктивной форме, превышает выбранное пороговое значение, сигнал об этом может быть передан на автоматические скважинные системы управления или, в альтернативном варианте, передан на поверхность земли для изменения рабочих параметров бурения. Любая мода движения бурильной колонны может иметь больше одного порогового значения. Каждому такому пороговому значению может соответствовать код сигнала тревоги, соответствующий серьезности такого движения бурильной колонны. Каждый такой код сигнала тревоги может быть направлен в автоматическую скважинную систему управления, в систему управления на поверхности или на пульт управления оператора буровой установки либо для изменения одного или нескольких рабочих параметров бурения, либо, в альтернативном ва-6 008978 рианте, для остановки процесса бурения. Предыдущие варианты реализации способа включают выполнение спектрального анализа и обнаружение существования деструктивной формы с помощью процессора 46 (фиг. 2) или аналогичного устройства, расположенного где-либо в ВНА 42 (фиг. 2). В других вариантах измеренные ускорения могут передаваться на поверхность земли, причем спектральный анализ и определение моды могут производиться на поверхности земли. Один способ передачи измеренных ускорений и других величин для обработки состоит в использовании типа бурильной трубы, описанного в опубликованной патентной заявке США 2002/0075114 А 1, Hall и др. Бурильная труба, описанная в заявке Hall и др., содержит провода в каждом сегменте бурильной трубы, соединенные электромагнитной связью, и некоторое количество повторителей сигнала, расположенных в определенных местах на протяжении бурильной колонны. В альтернативном варианте в качестве коммуникационного канала связи между скважинным процессором и поверхностью может использоваться волоконно-оптическая или гибридная система телеметрии. Другой вариант обнаружения существования поперечных деструктивных мод в ВНА можно объяснить с помощью фиг. 9, 10 и 11. Система MWD 37 (фиг. 2), как упоминалось выше, содержит акселерометры, расположенные так, чтобы воспринимать ускорения, направленные в трех взаимно ортогональных направлениях, магнитометры, измеряющие вращательную ориентацию системы, и соответственные акселерометры. Обычно одно направление акселерометра параллельно оси корпуса 47 (фиг. 2), а другие два направления перпендикулярны оси корпуса. Ускорения, измеренные поперечными акселерометрами,можно дважды проинтегрировать, чтобы определить в функции времени и с учетом изменения ориентации датчика, измеренной магнитометрами, положение системы MWD относительно осевой линии скважины. Пример определения поперечного положения относительно времени показан на фиг. 9. Кривая 68 соединяет расчетные точки положения системы MWD в выбранные моменты времени. Кривая 68 на фиг. 9 отображает практически "нормальное" вращение ВНА, где термин "нормальное" означает, что вращение практически происходит вокруг оси ВНА с очень небольшими отклонениями ВНА в сторону. Соответствующая кривая 70 поперечного положения показана на фиг. 10. Кривая 70 на фиг. 10 отображает наличие боковых "толчков", или быстрых поперечных отклонений ВНА. Интересный аспект отклонения типа толчка, показанного на фиг. 10, состоит в том, что величина поперечного отклонения такова, что оно не приводит к соприкосновению компонента бурильной трубы со стенкой скважины, и такой толчок может в некоторых случаях не быть деструктивным или быть лишь в малой степени деструктивным по отношению к затронутому компоненту ВНА. При прежних методах обнаружения моды гидроимпульсная телеметрия вызывала появление сигнала тревоги, если мгновенное значение ускорения в любом направлении превышало установленное пороговое значение, и такой сигнал мог указывать, что движение, подобное изображенному на фиг. 10, требует немедленного вмешательства оператора буровой установки. Однако другие моды, такие как показанная на фиг. 11 кривая 72, указывающая на завихрение,могут быть гораздо более деструктивными для ВНА или других компонентов буровой колонны вследствие больших изгибных напряжений или износа компонентов буровой колонны, который, как предполагается, должен иметь место. В то же время завихрение, поскольку при нем имеет место практически постоянный контакт между ВНА или компонентом буровой колонны и стенкой скважины (22 на фиг. 1), может не вызывать ускорений, превышающих конкретный "деструктивный" порог. Поэтому прежние способы, которые показывали только ускорение, превышающее пороговое значение, могли не обнаружить закручивание и в то же время могли выдать ложный сигнал деструктивной формы в ВНА. Описываемый вариант со ссылками на фиг. 9, 10 и 11 требует, однако, чтобы поперечная составляющая ускорения измерялась в каждом компоненте ВНА, для которого требуется идентифицировать форму. В одном варианте изобретения различные моды движения бурильной колонны идентифицируются путем вычисления как среднего поперечного отклонения, так и вариации поперечного отклонения. Нормальный режим бурения, изображенный 68 кривой поперечного отклонения на фиг. 9, будет иметь очень маленькую вариацию поперечного отклонения и маленькое среднее поперечное отклонение. Поперечная вибрация бурильной колонны, изображенная кривой 70 поперечного отклонения на фиг. 10, будет иметь большое среднее отклонение и большую вариацию поперечного отклонения в зависимости от диаметра скважины и компонента бурильной колонны. Режим завихрения бурильной колонны, изображенного кривой 72 поперечного отклонения на фиг. 11, будет иметь еще большее среднее отклонение бурильной колонны от центра, но при этом обычно имеет меньшую вариацию отклонения, чем в режиме поперечной вибрации бурильной колонны в зависимости от диаметров скважины и бурильной колонны. Относительное направление отклонений бурильной колонны может быть использовано для различения между формами завихрения вперед и назад. Еще один вариант реализации изобретения может быть лучше понят с помощью фиг. 12. В этом варианте по меньшей мере один датчик, расположенный в ВНА или в системе MWD 37 (фиг. 2), измеряет параметр, относящийся к угловому ускорению. График такого измерения в функции времени, записанный в процессоре 46 (фиг. 2), изображен в виде кривой 74 на фиг. 12. В идеале ВНА должна вращаться во время бурения с практически постоянной скоростью и угловое ускорение должно быть практически нулевым, за исключением периодов пуска и останова вращения ВНА. Однако на скорость вращения ВНА влияет взаимодействие бурового долота 40 (фиг. 2) и бурильной колонны с земными породами 13 (фиг. 1) и-7 008978 силы трения между различными компонентами ВНА и стенками скважины 22 (фиг. 1). В некоторых случаях буровая колонна полностью прекращает вращаться в результате заклинивания на некоторое время в условиях избыточного вращающего момента на долоте и/или плохой очистки скважины. Бурильная колонна может оставаться прихваченной, пока вращающий момент, приложенный к бурильной колонне с поверхности, не превысит тормозное усилие, из-за которого бурильная колонна прекратила вращаться. Однако в течение времени, пока долото или нижняя часть ВНА не вращается, часть буровой колонны,расположенная между ВНА и поверхностью до верхнего привода 14 на (фиг. 1), продолжает вращаться. Как известно из уровня техники, часть бурильной колонны от ВНА до поверхности земли может поглощать значительное количество энергии вращения, поступающей с поверхности, так что иногда труба может совершить два или три полных оборота, прежде чем к прихваченной части бурильной колонны будет приложен вращающий момент, достаточный для того, чтобы заставить прихваченную часть бурильной колонны возобновить вращение. Момент вращения, накопленный в бурильной колонне над прихваченной частью, может освобождаться со значительным вращательным ускорением, когда прихваченная часть бурильной колонны начнет, наконец, вращаться. Такое раскручивание ВНА вызывает значительные моменты вращения в компонентах ВНА. Напротив, в результате продолжающегося вращения верхней части бурильной колонны большой момент прилагается к прихваченной части бурильной колонны. В некоторых случаях как при заклинивании, так и при раскручивании возможны срезание, пластическая деформация и ослабление резьбовых соединений между компонентами ВНА и бурильной колонны в результате больших угловых ускорений, возникающих при таком закручивании и раскручивании ВНА и бурильной колонны. Поэтому в варианте, изображенном на фиг. 12, угловое ускорение обычно, но не обязательно, измеряется системой MWD. Максимальные пороговые значения момента для обоих направлений вращения, относящиеся к усилиям среза или ослабления (соединение развинчивается) резьбовых соединений, определяются для каждого резьбового соединения в ВНА. Разрушающие значения момента для некоторых или для всех трубных компонентов бурильной колонны также могут быть определены. Пороговые значения момента 78 А и 78 В могут определяться в некоторых вариантах путем рассмотрения составных компонентов бурильной колонны с каждой стороны резьбового соединения как единой массы и предположения, что угловое ускорение практически одинаково по длине этих компонентов бурильной колонны. В некоторых вариантах пороговое значение момента может быть отнесено к разрушающему моменту одного или нескольких трубных компонентов бурильной колонны. Момент инерции каждого компонента бурильной колонны и ВНА известен или может быть легко определен. Крутящий момент между каждым компонентом ВНА можно определить по значениям момента инерции и измеренным значениям углового ускорения. Пороговые значения могут быть заданы в практически значащей процентной доле от минимального вращающего момента, который мог бы вызвать поломку или отвинчивание резьбового соединения в ВНА, рассчитанного, исходя из таких входных данных, как материал компонента бурильной колонны, тип соединения, коэффициент трения смазки резьбы и приложенный закручивающий момент. Если измеренное угловое ускорение превышает какоелибо из пороговых значений 78 А, 78 В, подобных показанным на кривой 76 на фиг. 12, сигнал об этом может быть передан на поверхность земли, как указывалось выше, в связи с фиг. 5-8. При получении такого сигнала оператор буровой установки может изменить один или несколько управляющих параметров бурения или выполнить определенные операции, такие как реверсирование бурильной колонны или регулировка состава бурильного раствора, чтобы уменьшить или исключить чрезмерные угловые ускорения. Как уже говорилось выше, вычисление, не превосходит ли угловое ускорение заданного предельного значения, может производиться также и на поверхности земли, в особенности при использовании "проводной" бурильной трубы, подобно предложенной в заявке Hall и др., или любой другой формы скоростной телеметрии. В некоторых вариантах продольное ускорение измеряется на ВНА 42 (фиг. 1). Продольное ускорение может измеряться, например, с помощью акселерометра, изображенного под номером 58 на фиг. 2. В процессоре 46 (фиг. 2) определяются максимальные значения продольного ускорения в выбранном интервале времени. Подходящий интервал времени может быть порядка от 5 до 20 с. Интервал времени, в конечном счете, относится к вышеописанному периоду прерывистого движения бурильной колонны. Максимальное продольное ускорение используется для вычисления максимального продольного усилия,действующего на компоненты ВНА, исходя из массы отдельных компонентов ВНА и ускорения, измеренного, как описано выше. Продольное усилие комбинируется с максимальным моментом, определенным, как описано выше со ссылками на фиг. 12, чтобы определить, не превышен ли комбинированный эксплуатационный предел безопасности для различных компонентов ВНА. Методы комбинирования максимального момента с максимальным продольным усилием для определения, не превышены ли в ВНА эксплуатационные пределы безопасности, хорошо известны из уровня техники. Один вариант изобретения включает определение скважинных ротационных ускорений в результате вариаций вращающего момента, приложенного к бурильной колонне верхним приводом 14 (фиг. 1). В этом варианте, как показано на блок-схеме на фиг. 14, крутящий момент измеряется на поверхности. Затем определяются амплитуда вариаций момента и средние значения момента на поверхности. Предполагается, что вариации момента, измеренные на поверхности, связаны с вариациями момента вдоль бурильной колонны и на ВНА. Вариации момента, оцененные таким образом или определенные на ВНА и-8 008978 вдоль бурильной колонны, преобразуются затем в угловые ускорения или используются непосредственно в качестве значений момента в предположении, что вариация момента образуется в разных точках вдоль бурильной колонны, как описано выше со ссылками на фиг. 12, чтобы определить, не превышен ли безопасный момент на компонентах ВНА. Вычисление, не превышен ли безопасный момент, может включать вычисленный вращающий момент, приложенный в выбранных точках вдоль ВНА, и вычисление моментов инерции компонентов ВНА, расположенных выше и ниже каждой выбранной точки. Другой вариант, описанный со ссылками на фиг. 15, включает измерение RPM (скорости вращения) с использованием измерений, выполняемых магнитометрами или акселерометрами в системе MWD 37(фиг. 1). Максимальные и минимальные значения RPM могут определяться в процессоре 46 (фиг. 2). На поверхности после передачи максимумов и минимумов RPM на поверхность, например, с помощью гидроимпульсной телеметрии оценивается период колебаний RPM путем определения периодичности колебаний момента, измеренных на поверхности. Затем значения RPM, переданные на поверхность, подгоняются под периодическую волнообразную кривую. Амплитуда периодической волнообразной кривой будет соответствовать разности между максимальной и минимальной RPM, а ее период соответствовать периоду колебаний вращающего момента. Затем из периодической волнообразной кривой могут быть определены максимальные и минимальные угловые ускорения. Значения углового ускорения могут быть использованы, как в вышеописанном варианте со ссылками на фиг. 12 и 13 для определения, не превышен ли безопасный момент в одном из компонентов бурильной колонны или ВНА. В альтернативном варианте значения RPM, измеренные системой MWD 37 (фиг. 1), могут быть переданы в процессор 46(фиг. 2) и подогнаны под периодическую волнообразную форму в процессоре 46 (фиг. 2). Угловые ускорения могут затем быть определены из периодической волнообразной кривой. Другим аспектом изобретения является определение скорости изнашивания компонентов бурильной колонны путем комбинирования определения моды движения буровой колонны с вычислением поперечных сил, скорости вращения и диаметра скважины и свойств материала компонента. Сначала на этапе 80 на фиг. 13 может быть определена мода движения буровой колонны, как это было изложено ранее со ссылками на фиг. 9, 10 и 11. Если модой движения оказывается скачкообразное движение или завихрение (этап 82), то процесс продолжается. Если мода движения нормальная (этап 84), то для определения износа могут быть использованы модели, известные из уровня техники. Затем на этапе 86 определяются ожидаемые поперечные усилия на различных компонентах бурильной колонны, например, с использованием любой из многочисленных моделирующих программ "крутящий момент и сопротивление", известных из уровня техники. Одна из таких моделирующих компьютерных программ или моделей крутящего момента и сопротивления реализуется под торговым названием WELLPLAN фирмой LandmarkGraphics, Houston, TX. Такие модели предсказывают, например, необходимый вес на крюке и вращающий момент на поверхности, используя в качестве входных величин среди прочего конфигурацию бурильной колонны, ожидаемую траекторию скважины и ожидаемые земные породы, через которые предполагается проходить, в виде коэффициентов трения. Такие модели выдают на выходе в выбранных положениях вдоль бурильной колонны поперечные усилия и внутренние напряжения в компонентах бурильной колонны. В ситуациях, когда бурильная колонна вращается без деструктивных мод движения("нормальное вращение"), поперечные силы в сочетании со скоростью износа, вычисляемой по свойствам материала компонентов бурильной колонны, геологической формации и составу бурильного раствора, позволяют разумно оценить скорость износа различных компонентов бурильной колонны, как результат трения различных компонентов буровой колонны о стенки скважины. Это показано на фиг. 13 на этапе 86. В альтернативном варианте коэффициенты трения, продольные силы при нормальном вращении и поперечные силы при нормальном вращении бурильной колонны, включая изгибные поперечные силы, могут быть определены при подаче на вход модели вращающего момента и сопротивления фактических параметров, таких как свободное вращение, силы подъема и опускания, то есть вес на крюке бурильной колонны при подъеме и опускании бурильной колонны, фактическая нагрузка на долото, вращающий момент, RPM, длины, диаметры, жесткость и другие характеристики компонентов бурильной колонны, траектория и диаметр скважины и свойства бурильного раствора, такие как плотность. Как можно видеть из предыдущего описания деструктивных мод движения, в частности прерывистого движения и завихрения вперед, когда прецессия оси бурильной колонны происходит в том же направлении, что вращение бурильной колонны, при таких деструктивных формах поперечные усилия и скорости вращения могут быстро изменяться. Например, при прерывистом движении, при котором происходит завихрение вперед, скорость вращения бурильной колонны может изменяться от нуля до скорости, в несколько раз превышающей номинальную или среднюю скорость вращения бурильной колонны. Поперечные силы, действующие на бурильную колонну, вызванные завихрением вперед, зависят от квадрата скорости вращения бурильной колонны. Поэтому полное поперечное усилие, действующее на бурильную колонну, представляет собой сумму поперечного усилия от нормального движения и сил,вызванных завихрением вперед. В одном варианте реализации способа в соответствии с этим аспектом изобретения следующий шаг состоит в оценке скорости вращения буровой колонны в выбранных местах на протяжении буровой колонны. Ниже поясняется, как выполняется такая оценка. Скорость вращения верхнего привода 14 (фиг. 1)-9 008978 на поверхности или другого привода бурильной колонны на поверхности и средняя скорость вращения всей бурильной колонны должны практически совпадать даже в течение относительно коротких интервалов времени, обычно порядка 5-10 с. Скорость вращения одного или нескольких компонентов ВНА может измеряться с помощью измерений магнитометрами или измерений углового ускорения, как было описано выше со ссылками на фиг. 5-10. В одном варианте скорость вращения буровой колонны в какомлибо месте вдоль буровой колонны может быть определена посредством линейной интерполяции скорости вращения между измеренной скоростью вращения у ВНА и измеренной скоростью вращения на поверхности. Это показано на этапе 90 на фиг. 13. В другом варианте вариация скорости вращения в произвольной точке на протяжении бурильной колонны может быть оценена посредством линейной интерполяции вдоль каждой секции бурильной колонны с равной жесткостью при кручении. Чтобы учесть различную жесткость при кручении отдельных компонентов буровой колонны, необходимо, во-первых, вычислить угловое положение у ВНА в функции времени и угловое положение у поверхности в функции времени. Изменение углового положения преобразуется в крутящий момент. Крутящий момент преобразуется в эквивалентное угловое смещение с использованием в качестве масштабного коэффициента жесткости при кручении и длины каждого компонента бурильной колонны. Угловое смещение или ориентация каждого положения может быть затем преобразовано в скорость вращения в каждом положении обычно посредством дифференцирования по времени. Прерывность скорости вращения в случаях, когда бурильная колонна мгновенно прекращает вращаться по меньшей мере в одном месте, может быть моделирована в виде усилия кручения, линейно возрастающего во времени и линейно возрастающего по длине бурильной колонны от поверхности земли до места прихватывания бурильной колонны. В то время, как прихваченный участок не вращается, крутящий момент, приложенный к каждой секции бурильной колонны, преобразуется в эквивалентное угловое смещение с использованием в качестве масштабного коэффициента жесткости при кручении и длины каждого компонента бурильной колонны. Угловое смещение в каждом положении может быть затем преобразовано в скорость вращения в каждом положении. Когда прихваченный участок бурильной колонны освободится, крутящий момент, накопленный над прихваченной секцией бурильной колонны,будет приложен к этой секции. В одном варианте, в котором производится расчет прерывистого движения, должно быть выбрано место, в котором происходит прихватывание бурильной колонны. После этого можно путем интерполяции определить смещение или положение в функции времени каждой точки от прихваченного места до поверхности земли с учетом жесткости при кручении каждого компонента бурильной колонны точно так же, как в предыдущем варианте. Это показано на этапе 88 на фиг. 13. Как известно из уровня техники, скорость завихрения вперед практически равна скорости вращения бурильной колонны. Поперечное усилие, сопровождающее завихрение вперед, вычисляется затем, исходя из скорости вращения бурильной колонны (RPM) в каждой точке вдоль бурильной колонны, массы каждого компонента бурильной колонны и радиуса завихрения, то есть радиуса скважины минус радиус компонента бурильной колонны. Как видно из фиг. 14, момент трения на единицу длины Twsf может быть вычислен по формулеS=m(R-r)2 Здесь S означает центростремительную силу, действующую на компонент бурильной колонны, m означает массу компонента, r - радиус компонента, а- скорость завихрения. Это выражение позволяет вычислить крутящий моментwsf=RS В предыдущем выраженииозначает коэффициент трения между стенками скважины 100 (фиг. 14) и поверхностями компонентов ВНА 102 (фиг. 14). Затем, используя в качестве входных такие параметры, как продольная нагрузка в каждой точке буровой колонны, определяемая с использованием модели крутящего момента и сопротивления, жесткость при изгибе каждого компонента бурильной колонны, размеры компонентов бурильной колонны и ранее определенные скорости завихрения, вычисляется длина контакта вдоль компонента бурильной колонны,которая может быть переменной, если в некоторых компонентах высажены бурильные замки. Длина контакта - это длина контакта трения между компонентом бурильной колонны и стенками скважины. Векторная сумма поперечной силы нормального вращения бурильной колонны и вычисленной динамической центростремительной силы завихрения распределяется затем по длине контакта для вычисления таких параметров, как полная динамическая поперечная сила, воздействующая на соответствующие компоненты бурильной колонны. Это показано в общем виде на этапе 94 на фиг. 13. Следующим этапом способа является вычисление скорости износа с использованием RPM, общей динамической поперечной силы, длины контакта, коэффициентов трения о стенки скважины, по модели крутящего момента и сопротивления, и коэффициентов износа. Коэффициенты износа могут определяться на этапе 96 на фиг. 13 по эмпирическим данным, полученным на основе данных по износу за прошедшее время и таких параметров, как свойства материала компонентов бурильной колонны, тип наплавки и толщина наплавки примененных упрочненных материалов, вычисленные динамические поперечные силы, коэффициенты трения скважины и продолжительность вращения. Вычисление скорости износа с- 10008978 учетом перечисленных факторов показано на этапе 98 на фиг. 13. Другим аспектом изобретения является способ определения степени усталости компонентов бурильной колонны. В одном варианте изобретения предусматривается суммирование степени усталости при изгибе, вызванном определенными модами движения бурильной колонны, и степеней усталости,вычисленных по изгибу вдоль изменения направления скважины при нормальном вращении компонентов бурильной колонны. Усталость при изгибе во время нормального вращения может быть вычислена при помощи описанной выше модели крутящего момента и сопротивления, такой как модель WELLPLAN. Первым этапом при определении степени усталости при изгибе, как показано на фиг. 15, является определение моды движения бурильной колонны на этапе 104, включая обнаружение "завихрения назад" на этапе 106, "поперечного изгиба" на этапе 108 и вариации "прерывистой" RPM в произвольной точке бурильной колонны. Определение моды движения бурильной колонны и RPM в произвольной точке на бурильной колонне может быть выполнено с использованием вариантов, подобных описанным выше. Скорость завихрения назад, если таковое обнаруживается, может быть определена способами, известными из уровня техники. Существование поперечного изгиба также может быть обнаружено описанным выше способом. Если никаких деструктивных мод движения не обнаруживается, то на этапе 110 для оценки износа и/или усталости может быть использована обычная модель износа, известная из уровня техники. Продольные и поперечные силы, включая поперечные силы при продольном изгибе, в каждой точке бурильной колонны могут быть определены с помощью модели крутящего момента и сопротивления,например модели WELLPLAN. Входными параметрами модели крутящего момента и сопротивления могут быть вычисленные или фактические параметры, такие как свободное вращение, веса подъема и опускания вместе с приложенной нагрузкой на долото, крутящий момент, RPM, длины компонентов бурильной колонны, диаметры, жесткость и другие характеристики, траектория и диаметр скважины и свойства бурильного раствора, такие как плотность. В случае обнаружения завихрения назад скорость завихрения вычисляется, исходя из диаметра соответствующего компонента бурильной колонны, диаметра скважины и RPM, приложенной на поверхности. Интенсивность изгиба завихрения прямо зависит от скорости завихрения и RPM. Центростремительная поперечная сила завихрения, вызванная завихрением, вычисляется, исходя из массы соответствующего компонента и скорости завихрения. Амплитуда изгиба соответствующих компонентов бурильной колонны может быть вычислена, исходя из поперечной силы завихрения, нормальной поперечной силы,жесткости на поперечный изгиб и диаметра затронутых и соседних компонентов бурильной колонны,как показано на этапе 118 на фиг. 15. Затем вычисляется степень усталости для каждого компонента,подвергающегося поперечному изгибу, с использованием вычисленных скоростей изгиба, RPM, амплитуд изгиба и коэффициентов усталости, принимаемых на основании эмпирических данных, полученных при отслеживании прежних измерений усталости и таких параметров, как свойства материала компонентов бурильной колонны, вычисленные динамические изгибающие силы и продолжительность вращения. В другом варианте вычисляется степень усталости, вызываемой поперечным изгибом. Частота, при которой поперечный изгиб имеет место, связана с его частотой, а оценка амплитуды поперечного изгиба для каждого компонента бурильной колонны может быть произведена, исходя из размеров соответствующего компонента бурильной колонны и диаметра скважины. Как указывалось выше, существование поперечного изгиба и компонент бурильной колонны, в котором поперечный изгиб имеет место, может быть определено, например, при помощи спектрального анализа измеренных ускорений. После этого степень усталости вычисляется для каждого компонента с поперечным изгибом, исходя из измеренных скоростей изгиба, вычисленных амплитуд изгиба и коэффициентов усталости, принимаемых на основании эмпирических данных, полученных при отслеживании прежних измерений усталости и таких параметров, как свойства материала компонентов бурильной колонны, прежние измерения скоростей динамического изгиба, размеры компонентов бурильной колонны и скважины и продолжительность изгиба. Как указывалось выше со ссылками на фиг. 13 и 14, оценка сил трения на различных компонентах бурильной колонны, вызванных вращательным движением бурильной колонны относительно стенок скважины, может быть произведена, исходя из моды движения бурильной колонны, массы компонентов бурильной колонны и скорости вращения бурильной колонны. В одном варианте вычисленные силы трения могут быть использованы для оценки величины вращающего момента, который может быть вызван состоянием скважины. В одном варианте этот вращающий момент оценивается как дополнительный момент, необходимый для вращения бурильной колонны с поверхности, например, верхним приводом 14(фиг. 1), чтобы преодолеть вычисленные силы трения буровой колонны и момент, требующийся для вращения бурильного долота 40 (фиг. 1). На этапе 126 на фиг. 16 величина крутящего момента, необходимого для преодоления трения вращения, вызванного поперечными силами на бурильной колонне, определяется, как было изложено выше со ссылками на фиг. 13 и 14. Отметим, что если обнаруженная мода движения, см., например, этап 84 на фиг. 13, не содержит завихрения вперед или прерывистого вращения, вращающий момент поперечных сил, определенный на этапе 126, будет практически равен нулю. На этапе 128 определяется так называемый "нормальный" крутящий момент, необходимый для- 11008978 вращения бурильной колонны. В одном варианте оценка нормальных поперечных сил на различных компонентах бурильной колонны может быть произведена с помощью известной из уровня техники модели крутящего момента и сопротивления, например упомянутой ранее модели, продающейся под торговым названием WELLPLAN. Исходя из скорости вращения бурильной колонны, оценок нормальных сил,полученных на модели, коэффициентов трения земных пород 13 (фиг. 1) и характеристик компонентов бурильной колонны, можно получить хорошую оценку величины крутящего момента, необходимого для вращения бурильной колонны с поверхности земли. На этапе 130 на фиг. 16 определяется или измеряется крутящий момент, необходимый для вращения бурильного долота 40 (фиг. 1). Измерение момента, необходимого для вращения бурильного долота, может производиться с помощью устанавливаемых в ВНА 42 (фиг. 1) различных датчиков момента, известных из уровня техники. Один такой датчик реализуется под торговым наименованием COPILOT фирмойBaker Hughes, Inc., Housto, Texas. В альтернативном варианте момент, необходимый для вращения долота, может быть вычислен, например, исходя из результатов прежних измерений в сходных геологических условиях и при таких же или сходных бурильных долотах, как используемое долото. Среди других данных, используемых для определения вращающего момента на долоте, могут быть скорость вращения долота и продольное усилие (вес), приложенное к долоту. Как известно из уровня техники, продольное усилие на долоте может быть определено с помощью датчика в ВНА, такого как упомянутый выше датчикCOPILOT, или определено посредством измерений на поверхности, например, датчиком 14 В (фиг. 1). На этапе 132 на фиг. 16 значения момента, измеренные и/или вычисленные, как описано выше, на этапах 126, 128 и 130, складываются и сравниваются с крутящим моментом, фактически развиваемым верхним приводом 14 (фиг. 1). Как указывалось выше со ссылкой на фиг. 1, крутящий момент может измеряться соответствующим датчиком, например датчиком 14 В. Если состояние скважины таково, что ничто в скважине не вызывает добавочного трения, сумма измеренных (вычисленных) моментов должна практически совпадать с моментом, развиваемым верхним приводом 14 (фиг. 1). В этом варианте, если момент, развиваемый верхним приводом, превышает сумму измеренных (вычисленных) моментов на величину, превышающую выбранное пороговое значение, это может служить индикацией ненормального или даже опасного состояния скважины. В некоторых вариантах регистрирующий блок 12 (фиг. 1) может быть запрограммирован на выдачу сигнала тревоги или другого предупреждения оператору бурильной установки в случае превышения порогового значения. Различные варианты реализации изобретения обеспечивают способ и систему для идентификации деструктивных мод движения и чрезмерной скорости износа и/или усталости бурильной колонны, чтобы оператор бурильной установки мог принять корректирующие меры, прежде чем компонент бурильной колонны выйдет из строя. Ввиду того, что изобретение описано со ссылками на ограниченное число реализаций, для специалиста, ознакомившегося с настоящим описанием, будет очевидно, что могут быть и другие варианты реализации, не выходящие за рамки изобретения, которые определены формулой изобретения. ФОРМУЛА ИЗОБРЕТЕНИЯ 1. Способ определения деструктивного крутящего момента на оборудовании низа бурильной колонны, в котором измеряют параметр, связанный с угловым ускорением, по меньшей мере в одной точке вдоль бурильной колонны; сравнивают угловое ускорение, определенное по измеренному параметру, с выбранным пороговым значением, которое связано с моментом инерции выбранных компонентов бурильной колонны и максимальным крутящим моментом, прикладываемым по меньшей мере к одному резьбовому соединению между выбранными компонентами, а также с моментом инерции трубных компонентов бурильной колонны; генерируют сигнал тревоги в случае превышения угловым ускорением выбранного порогового значения. 2. Способ по п.1, отличающийся тем, что генерирование сигнала тревоги включает реформатирование модуляции гидроимпульсной схемы телеметрии. 3. Способ по п.1, отличающийся тем, что выбранные компоненты включают по меньшей мере один из следующих компонентов: долото, гидравлический забойный двигатель, оборудование системы скважинных исследований в процессе бурения, бурильный замок, стабилизатор и воротник бура. 4. Способ по п.1, в котором изменяют по меньшей мере один рабочий параметр бурения в ответ на генерирование сигнала тревоги. 5. Способ по п.4, отличающийся тем, что по меньшей мере один рабочий параметр бурения включает по меньшей мере один из следующих параметров: нагрузка на долото, скорость вращения бурильной колонны и расход бурильного раствора. 6. Способ по п.5, отличающийся тем, что определяют периодичность крутящего момента, измеряют вариацию скорости вращения оборудования низа бурильной колонны и определяют угловое ускорение по колебаниям с амплитудой, соответствующей вариации скорости вращения, и периодичностью, соответствующей периодичности крутящего момента. 7. Способ по п.6, отличающийся тем, что определяют угловое ускорение по скорости вращения- 12008978 оборудования низа бурильной колонны. 8. Способ по п.7, отличающийся тем, что определение углового ускорения включает представление скорости вращения оборудования низа бурильной колонны в виде периодических колебаний, по которым определяют угловое ускорение. 9. Способ по п.1, отличающийся тем, что параметр включает угловое ускорение или крутящий момент, измеренный по меньшей мере в одном компоненте оборудования низа бурильной колонны, или скорость вращения оборудования низа бурильной колонны, или крутящий момент, приложенный к бурильной колонне на поверхности земли. 10. Способ по п.1, отличающийся тем, что измеряют параметр, связанный с продольным ускорением оборудования низа бурильной колонны; определяют продольные усилия по измеренному параметру; компонуют продольные усилия с крутящим моментом, определенным по параметру, связанному с продольным ускорением; и генерируют сигнал тревоги в случае превышения продольными усилиями, скомпонованными с крутящим моментом, порогового значения безопасной работы. 11. Устройство для определения деструктивного крутящего момента на оборудовании низа бурильной колонны, содержащее датчик для измерения углового ускорения по меньшей мере в одной точке вдоль бурильной колонны; средства для сравнения углового ускорения с выбранным пороговым значением, связанные с датчиком, причем пороговое значение зависит от момента инерции выбранных компонентов бурильной колонны и максимального крутящего момента, прикладываемого к резьбовым соединениям между выбранными компонентами; и средства для генерирования сигнала тревоги в случае превышения угловым ускорением выбранного порогового значения. 12. Устройство по п.11, отличающееся тем, что средства для генерирования сигнала тревоги содержат средства для форматирования модуляции гидроимпульсной схемы телеметрии. 13. Устройство по п.11, отличающееся тем, что выбранные компоненты включают по меньшей мере один из следующих компонентов: долото, бурильный замок, гидравлический забойный двигатель, оборудование системы скважинных исследований в процессе бурения, стабилизатор и воротник бура. 14. Способ определения избыточного крутящего момента в скважине, в котором измеряют параметр, связанный с крутящим моментом на компонентах бурильной колонны в скважине; определяют крутящий момент, развиваемый буровым долотом, связанным с нижним концом оборудования низа бурильной колонны; определяют крутящий момент, необходимый для вращения бурильной колонны, установленной над оборудованием низа бурильной колонны; определяют разность между моментом, определенным по измеренному параметру, требуемым для вращения бурильной колонны с поверхности земли,и суммой момента на буровом долоте и необходимого момента для бурильной колонны; и осуществляют индикацию избыточного момента в случае превышения указанной разностью выбранного порогового значения.
МПК / Метки
МПК: E21B 47/024
Метки: устройство, колонны, определения, оборудовании, бурильной, способ, деструктивного, крутящего, низа, момента
Код ссылки
<a href="https://eas.patents.su/19-8978-sposob-i-ustrojjstvo-dlya-opredeleniya-destruktivnogo-krutyashhego-momenta-na-oborudovanii-niza-burilnojj-kolonny.html" rel="bookmark" title="База патентов Евразийского Союза">Способ и устройство для определения деструктивного крутящего момента на оборудовании низа бурильной колонны</a>
Способ и устройство для определения моды движения бурильной колонны
Номер патента: 7498
Опубликовано: 27.10.2006
Автор: Хатчинсон Марк У.
МПК: E21B 47/024
Метки: бурильной, колонны, определения, движения, моды, устройство, способ
Формула / Реферат:
1. Способ определения моды движения бурильной колонны, в котором измеряют поперечное ускорение бурильной колонны; определяют поперечное положение бурильной колонны относительно времени, исходя из измерений ускорения; и определяют моду, исходя из указанного положения относительно времени. 2. Способ по п.1, отличающийся тем, что поперечное ускорение измеряют в направлениях, перпендикулярных друг другу и оси бурильной колонны. 3. Способ по п.1,...
Преобразователь крутящего момента и система, использующая преобразователь крутящего момента
Номер патента: 7416
Опубликовано: 27.10.2006
Автор: Вайс Ричард Дж.
МПК: H02K 49/00, H02K 7/00, H02K 37/00...
Метки: система, преобразователь, крутящего, использующая, момента
Формула / Реферат:
1. Преобразователь крутящего момента, включающий в себя: маховик, вращающийся вокруг первой оси, причем маховик включает в себя первую часть корпуса; первое множество постоянных магнитов, установленных в первой части корпуса, причем каждый постоянный магнит из первого множества простирается вдоль направления соответствующей радиальной оси по отношению к первой оси; и второе множество постоянных магнитов, установленных в первой части корпуса,...
Фитинг бурильной колонны
Номер патента: 513
Опубликовано: 28.10.1999
Авторы: Фернандес Денис Роберт, Мюррей Джеффри Нил
МПК: E21B 17/10
Метки: фитинг, бурильной, колонны
Формула / Реферат:
1. Фитинг для снижения трения между фитингом и секцией бурильной колонны или дополнительным фитингом на бурильной колонне, содержащей тело, имеющее трубчатое высверленное отверстие, образующее множество проходящих в продольном направлении выемок, разнесенных по окружности вокруг высверленного отверстия, с такими размерами, чтобы смазывать поверхность раздела между фитингом и бурильной колонной или дополнительным фитингом текучей средой в буровой...
Дифференциальный электродвигатель с различным преобразованием крутящего момента
Номер патента: 5267
Опубликовано: 30.12.2004
Автор: Вайш Эрвин
МПК: B60K 6/04, B60L 11/12, F16H 3/72...
Метки: крутящего, электродвигатель, момента, дифференциальный, преобразованием, различным
Формула / Реферат:
1. Дифференциальный двигатель с изменяемым выходным крутящим моментом, включающий в себя (a) двигатель, вращающий выходной вал с определенной частотой и сообщающий входной крутящий момент выходному валу; (b) каскад преобразования крутящего момента, соединенный с двигателем с целью преобразования входного крутящего момента в крутящий момент вала с выходным приводом для соединения с нагрузкой; (c) где каскад преобразования крутящего момента...
Механизм передачи крутящего момента
Номер патента: 7019
Опубликовано: 30.06.2006
Автор: Дейн Кевин Артур
МПК: B25B 13/00, B25B 21/00, B25B 13/46...
Метки: момента, крутящего, передачи, механизм
Формула / Реферат:
1. Механизм передачи крутящего момента, содержащий внешний корпус, имеющий внутреннюю поверхность, образующую в нем полость; внутренний корпус, имеющий внешнюю поверхность, причем внутренний корпус расположен, по меньшей мере, частично внутри полости и способен при использовании вращаться в ней; множество роликов, каждый из которых расположен между внешним корпусом и внутренним корпусом; в котором использованы одна или более кулачковых...
Предыдущий патент: Сетевое оконечное устройство, сервер доставки и система клиент/сервер
Следующий патент: Улучшенный способ и система для выявления и/или прогнозирования биологических аномалий, например, церебральных нарушений
Случайный патент: Скважинное фильтрующее устройство